STM32 带can通讯 485 串口 232串口通讯 中文件资料 最小系统说明书

深圳轩微胜电子科技 STM32全功能工控板 最小系统板 https://www.360docs.net/doc/9713200792.html,/ STM32F103C8T6最小系统带CAN 485 232 说明书 目
录:
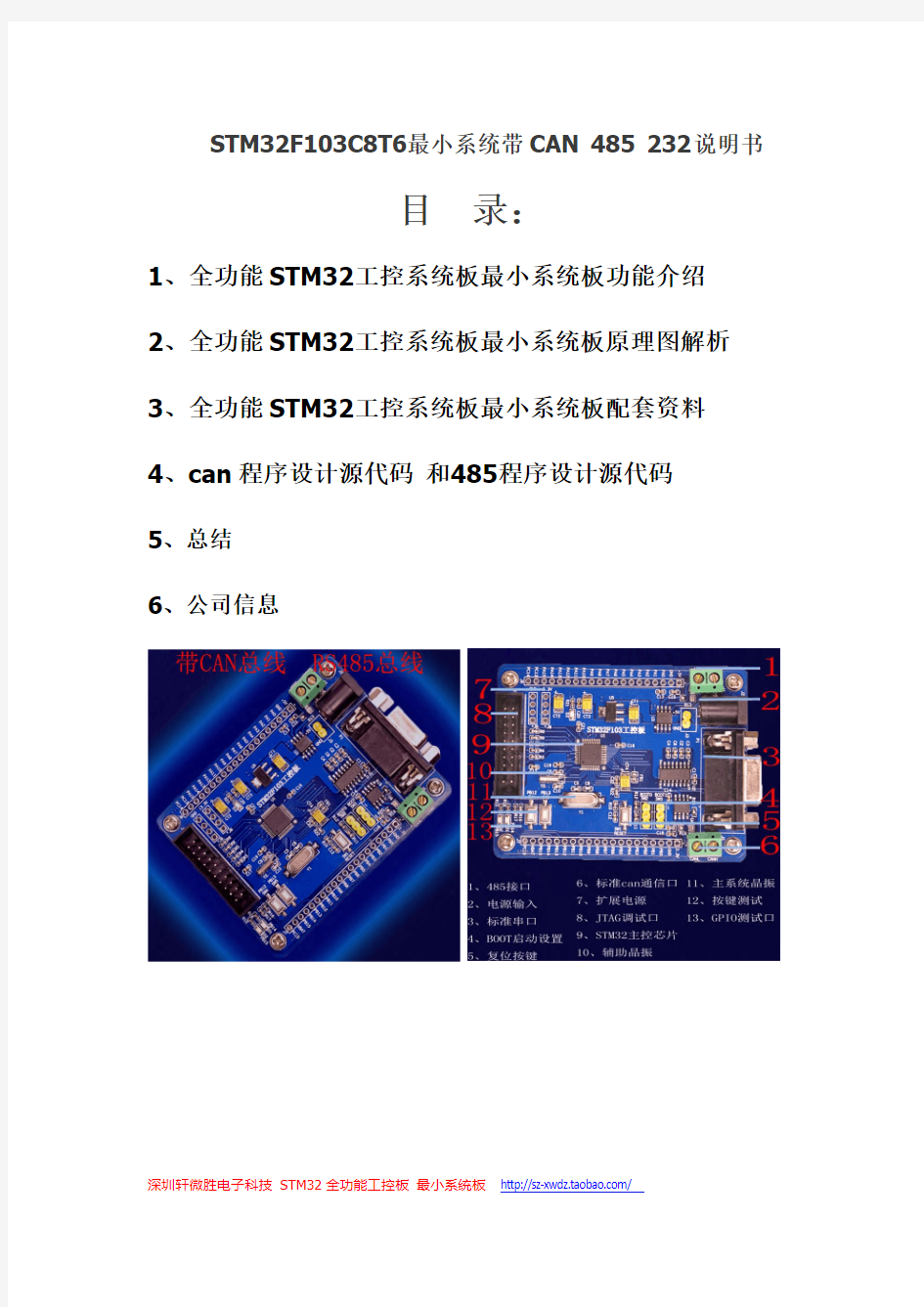
1、全功能STM32工控系统板最小系统板功能介绍
2、全功能STM32工控系统板最小系统板原理图解析
3、全功能STM32工控系统板最小系统板配套资料
4、can 程序设计源代码 和485程序设计源代码
5、总结
6、公司信息
一、全功能STM32工控系统板介绍:
STM32最小系统板主要协助广大工程师与学生在产品调试、新产品开发,样机测试,参加大赛、毕业设计等领域的应用和开发,全功能STM32
工控系统板最小系统板的主要特点有:
1、全功能通信系统:集成CAN通讯,485通讯,232串口通讯
于一身,方便各种通信的切换使用。
2、标准下载口:国际标准的Jlink下载口,同时兼容通信程
序下载,便捷可靠。
3、宽电源接口:适应工控需求的电源,无论在什么系统上应
用,系统自动识别电源进行调整,不需要外接电源,方便应用。
4、工业应用级布线,采用多层板设计,公共电源和地完全隔
离,加大了过载能力,抗干扰能力强。
5、体积小,方便安装应用
6、跳帽设计,方便多重状态组合
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
图一:功能原理图
https://www.360docs.net/doc/9713200792.html,/item.htm?spm=a1z10.1-c.w4004-9605616956.6.v1FXtM&id=43719925208二、全功能STM32工控系统板原理图解析:
2.1按键与LED电路:
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
2.2 CAN接口电路:
2.3 485接口电路:
2.4 扩展电源接口:
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
2.5 IO接口:
2.6 JTAG电路
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
深圳轩微胜电子科技 STM32全功能工控板 最小系统板 https://www.360docs.net/doc/9713200792.html,/
2.7 主控CPU 电路
:
2.8复位电路:
2.9电源电路:
2.10启动引导电路:
三、全功能STM32工控系统板最小系统板配套资料:
配套350MB资料,包括Stm32系统详解,Stm32各种详细实验源代码和各类芯片的技术资料,程序设计的技术资料
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
四、can程序源代码和485程序源代码
4.1 CAN源代码
#ifndef __CAN_H
#define __CAN_H
#include "stm32f10x.h"
void CAN_INIT(void);
void can_tx(u8 Data1,u8 Data2);
void can_rx(void);
void CAN_NVIC_Configuration(void);
void CAN_GPIO_Config(void);
#endif /* __CAN_H */
/******************** ********************
* 文件名:can.c
* 描述:CAN测试应用函数库。
* 实验平台:MINI STM32开发板基于STM32F103C8T6
* 硬件连接:-----------------
* | |
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
| PB8-CAN-RX |
* | PB9-CAN-TX |
* | |
* -----------------
* 库版本:ST3.0.0
* *********************************************************/
#include "can.h"
#include "led.h"
#include "stdio.h"
typedef enum {FAILED = 0, PASSED = !FAILED} TestStatus;
/* 在中断处理函数中返回 */
__IO uint32_t ret = 0;
volatile TestStatus TestRx;
/*CAN RX0 中断优先级配置 */
void CAN_NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
/* enabling interrupt */
NVIC_InitStructure.NVIC_IRQChannel=USB_LP_CAN1_RX0_IRQn;;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*CAN GPIO 和时钟配置 */
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
void CAN_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 复用功能和GPIOB端口时钟使能*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);
/* CAN1 模块时钟使能 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* Configure CAN pin: RX */ // PB8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure CAN pin: TX */ // PB9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
//#define GPIO_Remap_CAN GPIO_Remap1_CAN1 本实验没有用到重映射I/O
GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
}
/* CAN初始化 */
void CAN_INIT(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
CanTxMsg TxMessage;
/* CAN register init */
CAN_DeInit(CAN1); //将外设CAN的全部寄存器重设为缺省值
CAN_StructInit(&CAN_InitStructure);//把CAN_InitStruct中的每一个参数按缺省值填入
/* CAN cell init */
CAN_InitStructure.CAN_TTCM=DISABLE;//没有使能时间触发模式
CAN_InitStructure.CAN_ABOM=DISABLE;//没有使能自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE;//没有使能自动唤醒模式
CAN_InitStructure.CAN_NART=DISABLE;//没有使能非自动重传模式
CAN_InitStructure.CAN_RFLM=DISABLE;//没有使能接收FIFO锁定模式
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
CAN_InitStructure.CAN_TXFP=DISABLE;//没有使能发送FIFO优先级
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;//CAN设置为正常模式
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq; //重新同步跳跃宽度1个时间单位
CAN_InitStructure.CAN_BS1=CAN_BS1_3tq; //时间段1为3个时间单位
CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; //时间段2为2个时间单位
CAN_InitStructure.CAN_Prescaler=60; //时间单位长度为60
CAN_Init(CAN1,&CAN_InitStructure);
//波特率为:72M/2/60(1+3+2)=0.1 即100K
/* CAN filter init */
CAN_FilterInitStructure.CAN_FilterNumber=1;//指定过滤器为1
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//指定过滤器为标识符屏蔽位模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//过滤器位宽为32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;// 过滤器标识符的高16位值
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;// 过滤器标识符的低16位值
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//过滤器屏蔽标识符的高16位值
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;// 过滤器屏蔽标识符的低16位值
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;// 设定了指向过滤器的FIFO为0 CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;// 使能过滤器
CAN_FilterInit(&CAN_FilterInitStructure);// 按上面的参数初始化过滤器
/* CAN FIFO0 message pending interrupt enable */
CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //使能FIFO0消息挂号中断
}
/* 发送两个字节的数据*/
void can_tx(u8 Data1,u8 Data2)
{
CanTxMsg TxMessage;
TxMessage.StdId=0x00; //标准标识符为0x00
TxMessage.ExtId=0x0000; //扩展标识符0x0000
TxMessage.IDE=CAN_ID_EXT;//使用标准标识符
TxMessage.RTR=CAN_RTR_DATA;//为数据帧
TxMessage.DLC=2; // 消息的数据长度为2个字节
TxMessage.Data[0]=Data1; //第一个字节数据
TxMessage.Data[1]=Data2; //第二个字节数据
CAN_Transmit(CAN1,&TxMessage); //发送数据
}
/* USB中断和CAN接收中断服务程序,USB跟CAN公用I/O,这里只用到CAN的中断。 */
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
RxMessage.StdId=0x00;
RxMessage.ExtId=0x00;
RxMessage.IDE=0;
RxMessage.DLC=0;
RxMessage.FMI=0;
RxMessage.Data[0]=0x00;
RxMessage.Data[1]=0x00;
CAN_Receive(CAN1,CAN_FIFO0, &RxMessage); //接收FIFO0中的数据
if((RxMessage.Data[0]==0x99)&&(RxMessage.Data[1]==0xbb))
{ LED1(0);LED2(1);}
if((RxMessage.Data[0]==0x55)&&(RxMessage.Data[1]==0x77))
{ LED1(1);LED2(0);}
}
4.2 485程序源代码
/******************** ********************
* 文件名:main.c
* 描述:给相同两个MINI板下载此程序后,按下一个板子上的按键,可以点亮另一个板子 * 上对应的LED。两个板子不分主从。
* 实验平台:MINI STM32开发板基于STM32F103C8T6
* 库版本:ST3.0.0
* *********************************************************/
#include "stm32f10x.h"
#include "usart1.h"
#include "led.h"
void Delay(vu32 nCount)
{
for(; nCount != 0; nCount--);
}
/*按键管脚初始化*/
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
void KeyInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能外设时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; //最高输出速率10MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; //最高输出速率10MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*检测是否有按键按下*/
void GetKey(void)
{
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13))
{
Delay(1000000);//去抖动//去抖动
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13))
{
while(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13)){ ; }//等待按键释放
RS485_SendByte(0X02);
LED1(1);LED2(1);
}
}
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12))
{
Delay(1000000);//去抖动//去抖动
if(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12))
{
while(Bit_RESET == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12)){ ; }//等待按键释放
RS485_SendByte(0X01);
LED1(1);LED2(1);
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
}
}
}
/*USART3 接收中断配置 */
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* Enable the USART1 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
int main(void)
{
SystemInit();//配置系统时钟为 72M
KeyInit(); //按键管脚初始化
LED_GPIO_Config(); //LED管脚初始化
NVIC_Configuration();//USART3 接收中断配置
USART3_int(); //USART1 配置
while (1)
{
GetKey(); //检测是否有按键按下
}
}
/******************** ********************
* 文件名:usart1.c
* 描述:配置USART3
* 实验平台:MINI STM32开发板基于STM32F103C8T6
* 硬件连接:------------------------
* | PA9 - USART1(Tx) |
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
* | PA10 - USART1(Rx) |
* ------------------------
* 库版本:ST3.0.0
* **********************************************************************************/
#include "usart1.h"
/*RE跟GPIOB1管脚相连*/
#define Set_RE GPIO_SetBits(GPIOB,GPIO_Pin_1);
#define Clr_RE GPIO_ResetBits(GPIOB,GPIO_Pin_1);
/*DE跟GPIOB0管脚相连*/
#define Set_DE GPIO_SetBits(GPIOB,GPIO_Pin_0);
#define Clr_DE GPIO_ResetBits(GPIOB,GPIO_Pin_0);
void DelayNuS(unsigned int i)
{
unsigned char t = 0;
for(;i>0;i--)
{
for(t=0;t<2;t++)
{
}
}
}
/*配置 USART3*/
void USART3_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 使能 USART3 时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);//使能外设时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* USART3 使用IO端口配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOA
/* USART3 工作模式配置 */
USART_https://www.360docs.net/doc/9713200792.html,ART_BaudRate = 9600; //波特率设置:9600
USART_https://www.360docs.net/doc/9713200792.html,ART_WordLength = USART_WordLength_8b; //数据位数设置:8位
USART_https://www.360docs.net/doc/9713200792.html,ART_StopBits = USART_StopBits_1; //停止位设置:1位
USART_https://www.360docs.net/doc/9713200792.html,ART_Parity = USART_Parity_No ; //是否奇偶校验:无
USART_https://www.360docs.net/doc/9713200792.html,ART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制模式设置:没有使能
USART_https://www.360docs.net/doc/9713200792.html,ART_Mode = USART_Mode_Rx | USART_Mode_Tx;//接收与发送都使能
USART_Init(USART3, &USART_InitStructure); //初始化USART3
/*使能串口3的发送和接收中断*/
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
USART_Cmd(USART3, ENABLE);// USART3使能
}
/*发送一个字节数据*/
void RS485_SendByte(unsigned char SendData)
{
Set_DE;
Set_RE;
DelayNuS(5000);
USART_SendData(USART3,SendData);
while(USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
DelayNuS(5000);
Clr_DE;
Clr_RE;
}
/*初始化USART3*/
void USART3_int(void)
{
USART3_Config();
}
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
五、总结
此模块所有已经全部调试成功,拥有3年应用经验,可提供各种程序支持,欢迎进行技术交流!
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
深圳轩微胜电子科技 STM32全功能工控板 最小系统板 https://www.360docs.net/doc/9713200792.html,/
六、公司信息
深圳市轩微胜电子科技有限公司是一家专业的集电子产品设计,生产和销售于一体的现货供应商,公司目前主营:各种采集卡、测试
座、烧录器各大品牌集成电路、各种分立元件、电子模块等,公司备有大量现货,在全球各地开辟了广泛稳固的供货渠道。目前可为国内制造商提供快捷可靠的异地交货,为客户提供零风险提货, 保障客户各项权益。轩微胜电子科技公司拥有强大的研发能力,可根据客户需求提供相应产品开发协助服务,参与系统研发,公司把高标准,精细化作业服务原则,把以品质提升价值作为经营理念,把客户的产品质量和经济效益是我公司的工作重点作为基本方针,公司秉着修身、治业、怀天下的价值理念全心全意为客户创造价值。我们的奋斗目标是成为性价比最高的电子元器件供应商!
深圳轩微胜电子科技STM32全功能工控板最小系统板https://www.360docs.net/doc/9713200792.html,/
串口通信基本接线方法要点
串口通信基本接线方法 龚建伟2001.6.20 目次:1.DB9和DB25的常用信号脚说明 2.RS232C串口通信接线方法 3.串口调试中要注意的几点 目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。最为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到最为基本的接法,且直接用RS232相连,以回答前段网友的咨询。 1.DB9和DB25的常用信号脚说明 2.RS232C串口通信接线方法(三线制) 首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连 ?同一个串口的接收脚和发送脚直接用线相连对9针串口和25针串口,均是2与3直接相连; ?两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口)
上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼些交叉,信号地对应相接,就能百战 百胜。 3.串口调试中要注意的几点: ?不同编码机制不能混接,如RS232C不能直接与RS422接口相连,市面上专门的各种转换器卖,必须通过转换器才能连接; ?线路焊接要牢固,不然程序没问题,却因为接线问题误事; ?串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果; ?强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。
RS485-RS232-RS422通信协议
泰安思科赛德电子科技有限公司 RS485 通讯协议 RS-232与RS-422之间转换原理和接法 通常我们对于视频服务器、录像机、切换台等直接播出、切换控制主要使用串口进行,主要使用到RS-232、RS-422与RS-485三种接口控制。下面就串口的接口标准以及使用和外部插件和电缆进行探讨。 RS485 通讯协议 RS-232、RS-422与RS-485标准只对接口的电气特性做出规定,而不涉及接插件、电缆或协议,在此基础上用户可以建立自己的高层通信协议。例如:视频服务器都带有多个RS422串行通讯接口,每个接口均可通过RS422通讯线由外部计算机控制实现记录与播放。视频服务器除提供各种控制硬件接口外,还提供协议接口,如RS422接口除支持RS422的Profile协议外,还支持Louth、Odetics、BVW等通过RS422控制的协议。 RS-232、RS-422与RS-485都是串行数据接口标准,都是由电子工业协会(EIA)制订并发布的,RS-232在1962年发布。RS-422由RS-232发展而来,为改进RS-232通信距离短、速率低的缺点,RS-422定义了一种平衡通信接口,将传输速率提高到10Mbps,传输距离延长到4000英尺(速率低于100Kbps时),并允许在一条平衡总线上连接最多10个接收器。RS-422是一种单机发送、多机接收的单向、平衡传输规范,被命名为TIA/EIA-422-A 标准。为扩展应用范围,EIA又于1983年在RS-422基础上制定了RS-485标准,增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和突保护特性,扩展了总线共模范围,后命名为TIA/EIA485-A标准。 RS485 通讯协议 1. RS-232串行接口标准 目前RS-232是PC机与通信工业中应用最广泛的一种串行接口。RS-232被定义为一种在低速率串行通讯中增加通讯距离的单端标准。RS-232采取不平衡传输方式,即所谓单端通讯。收、发端的数据信号是相对于信号地。典型的RS-232信号在正负电平之间摆动,在发送数据时,发送端驱动器输出正电平在+5~+15V,负电平在5~-15V电平。当无数据传输时,线上为TTL,从开始传送数据到结束,线上电平从TTL电平到RS-232电平再返回TTL电平。接收器典型的工作电平在+3~+12V与-3~-12V。由于发送电平与接收电平的差仅为2V至3V左右,所以其共模抑制能力差,再加上双绞线上的分布电容,其传送距离最大为约15米,最高速率为20Kbps。RS-232是为点对点(即只用一对收、发设备)通讯而设计的,其驱动器负载为3kΩ~7kΩ。所以RS-232适合本地设备之间的通信。 RS485 通讯协议 2. RS-422与RS-485串行接口标准 (1)平衡传输 RS-422、RS-485与RS-232不一样,数据信号采用差分传输方式,也称作平衡传输,它使用一对双绞线,将其中一线定义为A,另一线定义为B。通常情况下,发送驱动器A、B 之间的正电平在+2~+6V,是一个逻辑状态,负电平在-2V~6V,是另一个逻辑状态。另有一个信号地C,在RS-485中还有一“使能”端,而在RS-422中这是可用可不用的。“使能”端是用于控制发送驱动器与传输线的切断与连接。当“使能”端起作用时,发送驱动器处于高阻状态,称作“第三态”,即它是有别于逻辑“1”与“0”的第三态。 (2)RS-422电气规定 由于接收器采用高输入阻抗和发送驱动器比RS232更强的驱动能力,故允许在相同传输线上连接多个接收节点,最多可接10个节点。即一个主设备(Master),其余为从设备(Salve),
关于STM32串口空闲中断IDEL的问题
关于STM32串口空闲中断IDEL的问题 1.空闲中断是接受数据后出现一个byte 的高电平(空闲)状态,就会触发空闲 中断.并不是空闲就会一直中断,准确的说应该是上升沿(停止位)后一个 byte,如果一直是低电平是不会触发空闲中断的(会触发break 中断)。 2.关于第二点有要铺垫的三个情况,datasheet 中”当一空闲帧被检测到时,其处 理步骤和接收到普通数据帧一样,但如果IDLEIE 位被设置将产生一个中断”“空 闲符号被视为完全由'1'组成的一个完整的数据帧,后面跟着包含了数 据的下一帧的开始位'1'的位数也包括了停止位的位数”空闲符号的 配图后面跟这一个低电平.有人理解为只有收到下一个数据的起始位才会触发中 断,这样理解是不对的,应该是数据后有空闲了一帧就会触发. 3.清中断的方式感觉奇怪,使用函数USART_ClearITPendingBit( USART1, USART_IT_IDLE )清除不了中断的.我用的是3.5 的库,查看函数说明,里面的 @param 参数并没有IDLE,后面的@note 中,这样说:”PE(Parity error),FE(Framing error),NE(Noise error),ORE(OverRun error) and IDLE(Idle line detected) pending bits are cleared by software sequence: a read operation to USART_SR register (USART_GetITStatus()) followed by a read operation to USART_DR register (USART_ReceiveData()).”我是通过语句”USART1->DR;”来清除IDLE 中断的. 现在有很多数据处理都要用到不定长数据,而单片机串口的RXNE 中断一次 只能接收一个字节的数据,没有缓冲区,无法接收一帧多个数据,现提供两种 利用串口IDLE 空闲中断的方式接收一帧数据,方法如下: 方法1:实现思路:采用STM32F103 的串口1,并配置成空闲中断IDLE 模 式且使能DMA 接收,并同时设置接收缓冲区和初始化DMA。那么初始化完成 之后,当外部给单片机发送数据的时候,假设这帧数据长度是200 个字节,那
C51单片机和电脑串口通信电路图
C51单片机和电脑串口通信电路图与源码 51单片机有一个全双工的串行通讯口,所以单片机和电脑之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如电脑的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。我们采用了三线制连接串口,也就是说和电脑的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。 串口通讯的硬件电路如上图所示 在制作电路前我们先来看看要用的MAX232,这里我们不去具体讨论它,只要知道它是TTL和RS232电平相互转换的芯片和基本的引脚接线功能就行了。通常我会用两个小功率晶体管加少量的电路去替换MAX232,可以省一点,效果也不错,下图就是MAX232的基本接线图。
按图7-3加上MAX232就可以了。这大热天的拿烙铁焊焊,还真的是热气迫人来呀:P串口座用DB9的母头,这样就可以用买来的PC串口延长线进行和电脑相连接,也可以直接接到电脑com口上。
为了能够在电脑端看到单片机发出的数据,我们必须借助一个WINDOWS软件进行观察,这里我们利用一个免费的电脑串口调试软件。本串口软件在本网站https://www.360docs.net/doc/9713200792.html,可以找到 软件界面如上图,我们先要设置一下串口通讯的参数,将波特率调整为4800,勾选十六进制显示。串口选择为COM1,当然将网站提供的51单片机实验板的串口也要和电脑的COM1连接,将烧写有以下程序的单片机插入单片机实验板的万能插座中,并接通51单片机实验板的电源。
串口通信的接线方法
目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422、RS485较远),若距离较远,需附加调制解调器(MODEM)。最为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到最为基本的接法,且直接用RS232相连。 1、DB9和DB25的常用信号脚说明 2、RS232C串口通信接线方法(三线制) 首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连同一个串口的接收脚和发送脚直接用线相连对9针串口和25针串口,均是2与3直接相连; 两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口) 图2 上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼些交叉,信号地对应相接,就能百战百胜。 3、串口调试中要注意的几点: 不同编码机制不能混接,如RS232C不能直接与RS422接口相连,市面上专门的各种转换器卖,必须通过转换器才能连接; 线路焊接要牢固,不然程序没问题,却因为接线问题误事;
串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果; 强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。 RS232C标准串口接线方法 (第二版) 检验仪器与微机的通讯主要是以RS232C标准接口为主,而串口的接线方法也有一定的标准,在此谈谈几种常用的串口接法,仅作参考: 一、标准接法 1、9对9(包括9针对9孔,9孔对9孔,9针对9针): 说明:以下的孔、针指串口线两端的串口,不过2、3有可能不交换 2-------------3 3-------------2 4-------------6 5-------------5 6-------------4 7-------------8 8-------------7 2、9对25(包括9孔对25孔,9孔对25针) 2-------------3 (备注:2、3有可能不交换) 3-------------2 4-------------6 5-------------7 6-------------20 7-------------5 8-------------4
485与232通讯协议区别
1、什么是RS-232-C接口?采用RS-232-C接口有何特点?传输电缆长度如何考虑?计算机与计算机或计算机与终端之间的数据传送可以采用串行通讯和并行通讯二种方式。由于串行通讯方式具有使用线路少、成本低,特别是在远程传输时,避免了多条线路特性的不一致而被广泛采用。在串行通讯时,要求通讯双方都采用一个标准接口,使不同的设备可以方便地连接起来进行通讯。RS-232-C接口(又称EIA RS-232-C)是目前最常用的一种串行通讯接口。它是在1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。它的全名是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”该标准规定采用一个25个脚的DB25连接器,对连接器的每个引脚的信号内容加以规定,还对各种信号的电平加以规定。1)接口的信号内容实际上RS-232-C的25条引线中有许多是很少使用的,在计算机与终端通讯中一般只使用3-9条引线。RS-232-C最常用的9条引线的信号内容见附表2)接口的电气特性在RS-232-C中任何一条信号线的电压均为负逻辑关系。即:逻辑“1”,-5— -15V;逻辑“0” +5— +15V 。噪声容限为2V。即要求接收器能识别低至+3V的信号作为逻辑“0”,高到-3V的信号作为逻辑“1” 附表 1 引脚序号信号名称符号流向功能 2 发送数据TXD DTE→DCE DTE发送串行数据 3 接收数据RXD DTE←DCE DTE接收串行数据 4 请求发送RTS DTE→DCE DTE请求DCE将线路切换到发送方式 5 允许发送CTS DTE←DCE DCE 告诉DTE线路已接通可以发送数据 6 数据设备准备好DSR DTE←DCE DCE准备好7 信号地信号公共地8 载波检测DCD DTE←DCE 表示DCE接收到远程载波20 数据终端准备好DTR DTE→DCE DTE准备好22 振铃指示RI DTE←DCE 表示DCE与线路接通,出现振铃3) 接口的物理结构RS-232-C接口连接器一般使用型号为DB-25的25芯插头座,通常插头在DCE端,插座在DTE端. 一些设备与PC机连接的RS-232-C接口,因为不使用对方的传送控制信号,只需三条接口线,即“发送数据”、“接收数据”和“信号地”。所以采用DB-9的9芯插头座,传输线采用屏蔽双绞线。4)传输电缆长度由RS-232C标准规定在码元畸变小于4%的情况下,传输电缆长度应为50英尺,其实这个4%的码元畸变是很保守的,在实际应用中,约有99%的用户是按码元畸变10-20%的范围工作的,所以实际使用中最大距离会远超过50英尺,美国DEC公司曾规定允许码元畸变为10%而得出附表2 的实验结果。其中1号电缆为屏蔽电缆,型号为DECP.NO.9107723 内有三对双绞线,每对由22# AWG 组成,其外覆以屏蔽网。2号电缆为不带屏蔽的电缆。型号为DECP.NO.9105856-04是22#AWG的四芯电缆。附表2 DEC 公司的实验结果波特率 1 号电缆传输距离(英尺) 2 号电缆传输距离(英尺)1105000300030050003000 1200300030002400100050048001000250 9600250250 2. 什么是RS-485接口?它比RS-232-C接口相比有何特点?由于RS-232-C接口标准出现较早,难免有不足之处,主要有以下四点:1)接口的信号电平值较高,易损坏接口电路的芯片,又因为与TTL 电平不兼容故需使用电平转换电路方能与TTL电路连接。2)传输速率较低,在异步传输时,波特率为20Kbps。3)接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容易产生共模干扰,所以抗噪声干扰性弱。4)传输距离有限,最大传输距离标准值为50英尺,实际上也只能用在50米左右。针对RS-232-C的不足,于是就不断出现了一些新的接口标准,RS-485就是其中之一,它具有以下特点: 1. RS-485的电气特性:逻辑“1”以两线间的电压差为+(2—6)V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。接口信号电
TMS320F28335外部中断总结
TMS320F28335外部中断总结 作者:Free 文章来源:Free 点击数:93 更新时间:2010-8-26 在这里我们要十分清楚DSP的中断系统。C28XX一共有16个中断源,其中有2个不可屏蔽的中断RESET和NMI、定时器1和定时器2分别使用中断13 和14。这样还有12个中断都直接连接到外设中断扩展模块PIE上。说的简单一点就是PIE 通过12根线与28335核的12个中断线相连。而PIE的另外 一侧有12*8根线分别连接到外设,如AD、SPI、EXINT等等。这样PIE共管理12*8=96个外部中断。这12组大中断由28335核的中断寄存器IER来控 制,即IER确定每个中断到底属于哪一组大中断(如IER |= M_INT12;说明我们要用第12组的中断,但是第12组里面的什么中断CPU并不知道需 要再由PIEIER确定)。接下来再由PIE模块中的寄存器PIEIER中的低8确定该中断是这一组的第几个中断,这些配置都要告诉CPU(我们不难想 象到PIEIER共有12总即从PIEIER1-PIEIER12)。另外,PIE模块还有中断标志寄存器PIEIFR,同样它的低8位是来自外部中断的8个标志位,同 样CPU的IFR寄存器是中断组的标志寄存器。由此看来,CPU的所有中断寄存器控制12组的中断,PIE的所有中断寄存器控制每组内8个的中断。 除此之外,我们用到哪一个外部中断,相应的还有外部中断的寄存器,需要注意的就是外部中断的标志要自己通过软件来清零。而PIE和CPU的 中断标志寄存器由硬件来清零。 EALLOW; // This is needed to write to EALLOW protected registers PieVectTable.XINT2 = &ISRExint; //告诉中断入口地址 EDIS; // This is needed to disable write to EALLOW protected registers PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable the PIE block使能PIE PieCtrlRegs.PIEIER1.bit.INTx5= 1; //使能第一组中的中断5 IER |= M_INT1; // Enable CPU 第一组中断
串口通信的连线方法
转载:目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。最为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到最为基本的接法,且直接用RS232相连。 1.DB9和DB25的常用信号脚说明 9针串口(DB9) 25针串口(DB25[被屏蔽广告]) 针号功能说明缩写针号功能说明缩写 1 数据载波检测 DCD 8 数据载波检测 DCD 2 接收数据 RXD 3 接收数据 RXD 3 发送数据 TXD 2 发送数据 TXD 4 数据终端准备 DTR 20 数据终端准备 DTR 5 信号地 GND 7 信号地 GND 6 数据设备准备好 DSR 6 数据准备好 DSR 7 请求发送 RTS 4 请求发送 RTS 8 清除发送 CTS 5 清除发送 CTS 9 振铃指示 DELL 22 振铃指示 DELL 2.RS232C串口通信接线方法(三线制) 首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连 · 同一个串口的接收脚和发送脚直接用线相连对9针串口和25针串口,均是2与3直接相连; · 两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口) 上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼此交叉,信号地对应相接,就能百战百胜。 3.串口调试中要注意的几点: 串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果;强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。 单工、半双工和全双工的定义 如果在通信过程的任意时刻,信息只能由一方A传到另一方B,则称为单工。 如果在任意时刻,信息既可由A传到B,又能由B传A,但只能由一个方向上的传输存在,称为半双工传输。 如果在任意时刻,线路上存在A到B和B到A的双向信号传输,则称为全双工。 电话线就是二线全双工信道。由于采用了回波抵消技术,双向的传输信号不致混淆不清。双工信道有时也将收、发信道分开,采用分离的线路或频带传输相反方向的信号,如回线传输。 奇偶校验 串行数据在传输过程中,由于干扰可能引起信息的出错,例如,传输字符‘E’,其各位为:0100,0101=45H D7 D0 由于干扰,可能使位变为1,这种情况,我们称为出现了“误码”。我们把如何发现传输中的错误,叫“检错”。发现错误后,如何消除错误,叫“纠错”。 最简单的检错方法是“奇偶校验”,即在传送字符的各位之外,再传送1位奇/偶校验位。可采用奇校验或偶校验。
RS485通讯协议
RS485通讯协议 首先要知道什么是RS232和RS485. 典型的串行通讯标准是RS232和RS485.它们定义了电压,阻抗等.但不对软件协议给予定义 区别于RS232, RS485的特性包括: 1. RS-485的电气特性:逻辑“1”以两线间的电压差为+(2—6)V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。接口信号电平比RS -232-C 降低了,就不易损坏接口电路的芯片,且该电平与TTL电平兼容,可方便与TTL 电路连接。 2. RS-485的数据最高传输速率为10Mbps 3. RS-485接口是采用平衡驱动器和差分接收器的组合,抗共模干能力增强,即抗噪声干扰性好。 4. RS-485接口的最大传输距离标准值为4000英尺,实际上可达3000米,另外RS-232-C接口在总线上只允许连接1个收发器,即单站能力。而RS-485接口在总线上是允许连接多达128个收发器。即具有多站能力,这样用户可以利用单一的RS-485接口方便地建立起设备网络。因 RS-485接口具有良好的抗噪声干扰性,长的传输距离和多站能力等上述优点就使其成为首选的串行接口。因为RS485接口组成的半双工网络,一般只需二根连线,所以RS485接口均采用屏蔽双绞线传输。RS485接口连接器采用DB-9的9芯插头座,与智能终端RS485接口采用DB-9(孔),与键盘连接的键盘接口RS485采用DB-9(针)。
RS485编程 串口协议只是定义了传输的电压,阻抗等,编程方式和普通的串口编程一样!! RS-232与RS-422之间转换原理和接法 通常我们对于视频服务器、录像机、切换台等直接播出、切换控制主要使用串口进行,主要使用到RS-232、RS-422与RS-485三种接口控制。下面就串口的接口标准以及使用和外部插件和电缆进行探讨。 RS-232、RS-422与RS-485标准只对接口的电气特性做出规定,而不涉及接插件、电缆或协议,在此基础上用户可以建立自己的高层通信协议。例如:视频服务器都带有多个RS422串行通讯接口,每个接口均可通过RS422通讯线由外部计算机控制实现记录与播放。视频服务器除提供各种控制硬件接口外,还提供协议接口,如RS422接口除支持RS422的Profile协议外,还支持Louth、Odetics 、BVW等通过RS422控制的协议。 RS-232、RS-422与RS-485都是串行数据接口标准,都是由电子工业协会(EIA)制订并发布的,RS-232在1962年发布。RS-422由RS-232
最新stm32学习之串口usart复习进程
STM32学习之串口USART STM32 的串口是相当丰富的。最多可提供5路串口,有分数波特率发生器、支持单线光通信和半双工单线通讯、支持LIN、智能卡协议和IrDA SIR ENDEC 规范(仅串口3 支持)、具有DMA 等。串口最基本的设置,就是波特率的设置。STM32 的串口使用起来还是蛮简单的,只要你开启了串口时钟,并设置相应IO口的模式,然后配置一下波特率,数据位长度,奇偶校验位等信息,就可以使用了。 1、串口时钟使能。串口作为STM32 的一个外设,其时钟由外设始终使能寄存器控制,这里我们使用的串口1是在APB2ENR 寄存器的第14 位。除了串口1 的时钟使能在APB2ENR寄存器,其他串口的时钟使能位都在APB1ENR。 1、串口的作用:用在STM32板子和PC机通信的。我们调试的时候,无法知道是否正确,就可以用STM32的cpu,给串口输出一些信息给PC,我们通过屏幕(实际上是终端串口软件),可以看到这些信息,从而知道当前程序的错误可能出现的位置。当然,也可以在PC的键盘敲打命令,让串口帮传递给STM32板子,来执行这些命令。 2、串口的工作模式一般有两种方式:查询和中断 (1)查询:串口程序不断地循环查询,看看当前有没有数据要它传,如果有,就帮助传送(可以从PC到STM32板子,也可以从STM32 板子到PC)。 (2)中断:平时串口只要打开中断即可。如果发现有一个中断来,则意味着要它帮助传输数据——它就马上进行数据的传送。同样,可以从PC到STM32板子,也可以从STM32板子到PC 。 步骤一从硬件开始学习。大家先打开芯达STM32开发板附带的原理图。找到串口部分。笔者把它截图如下。我们发现,串口模块的电路是这样的:STM32的CPU引脚,通过两个PA端口的引脚PA10和PA9(此两个引脚复用USART),连接到一个SP3232芯片,或者MAX232芯片。然后再连接到DB9串口座上。由于232芯片可以允许走两路信号,因此,我们扩展了一个串口COM2,请注意,如无特别说明,我们都将使用COM1。
STM32串口中断接收方式详细比较
本例程通过PC机的串口调试助手将数据发送至STM32,接收数据后将所接收的数据又发送至PC机,具体下面详谈。。。 实例一: void USART1_IRQHandler(u8 GetData) { u8 BackData; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //中断产生 { USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清除中断标志. GetData = UART1_GetByte(BackData); //也行GetData=USART1->DR; USART1_SendByte(GetData); //发送数据 GPIO_SetBits(GPIOE, GPIO_Pin_8 ); //LED闪烁,接收成功发送完成 delay(1000); GPIO_ResetBits(GPIOE, GPIO_Pin_8 ); } } 这是最基本的,将数据接收完成后又发送出去,接收和发送在中断函数里执行,main函数里无其他要处理的。 优点:简单,适合很少量数据传输。 缺点:无缓存区,并且对数据的正确性没有判断,数据量稍大可能导致数据丢失。 实例二: void USART2_IRQHandler() { if(USART_GetITStatus(USART2,USART_IT_RXNE) != RESET) //中断产生 { USART_ClearITPendingBit(USART2,USART_IT_RXNE); //清除中断标志 Uart2_Buffer[Uart2_Rx_Num] = USART_ReceiveData(USART2); Uart2_Rx_Num++; } if((Uart2_Buffer[0] == 0x5A)&&(Uart2_Buffer[Uart2_Rx_Num-1] == 0xA5)) //判断最后接收的数据是否为设定值,确定数据正确性 Uart2_Sta=1; if(USART_GetFlagStatus(USART2,USART_FLAG_ORE) == SET) //溢出 { USART_ClearFlag(USART2,USART_FLAG_ORE); //读SR USART_ReceiveData(USART2); //读DR } } if( Uart2_Sta ) { for(Uart2_Tx_Num=0;Uart2_Tx_Num < Uart2_Rx_Num;Uart2_Tx_Num++)
STM32 无中断串口代码
STM32 无中断串口代码2010-05-14 16:09 串口,是我们日常使用最多的一部分,刚开始做电子工程师的,基本都是从这个开始的,下面的代码是我使用STM32库编写的串口输出和读取的代码。 1、串口初始化函数:void USART_Ini(USART_TypeDef* USARTx,u16 buad) 2、串口中断开启和关闭:USART_IT(USART_TypeDef* USARTx,FunctionalState NewState) 3、串口接收:u16 Getch(USART_TypeDef* USARTx) 4、串口单个字符输出:void Putch(USART_TypeDef* USARTx,u16 ch) 5、串口输出字符串:void PutStr(USART_TypeDef* USARTx,u16 *SendBuf,u16 Length) #include "stm32f10x_lib.h" u16 RecDateBuffer[100]; u16 RecLen; u8 SendDateBuffer[100]; /************************************************************* ****************** * Function Name : Uart_Ini * Description : 串口初始化 * Input : * Output : None * Return : ************************************************************** *****************/ void USART_Ini(USART_TypeDef* USARTx,u16 buad) { USART_InitTypeDef USART_InitStructure; USART_ClockInitTypeDef USART_ClockIni; GPIO_InitTypeDef GPIO_InitStructure; /* Configure USART1 Tx (PA.09) as alternate function push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure USART1 Rx (PA.10) as input floating */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
RS232C标准9针串口接线方法
RS232C标准9针串口接线方法 RS232C标准串口接线方法 (第二版) 检验仪器与微机的通讯主要是以RS232C标准接口为主,而串口的接线方法也有一定的标准,在此谈谈几种常用的串口接法,仅作参考: 一、标准接法 1、9对9(包括9针对9孔,9孔对9孔,9针对9针): 说明:以下的孔、针指串口线两端的串口,不过2、3有可能不交换2-------------3 3-------------2 4-------------6 5-------------5 6-------------4 7-------------8 8-------------7
2、9对25(包括9孔对25孔,9孔对25针) 2-------------3 (备注:2、3有可能不交换) 3-------------2 4-------------6 5-------------7 6-------------20 7-------------5 8-------------4 二、特殊接法 关于串口的非标准接口一般需要参考仪器说明书或者咨询仪器厂家才能获知,下面列举几种常见的特殊接法(每台仪器的具体串口具体接法可参考LIS事业部“仪器设置”文档库): 1、9孔对9针(H100尿液分析仪) 2--------------2
5--------------5 2、9孔对9孔(4-channel半自动血凝仪) 9孔对9孔,一一对应,全接。 3、9对25(C100尿液分析仪) 2--------------2 3--------------3 5--------------7 25串口中,4和5短接,6和20短接, 25串和9串间另接一根线,均焊在两头的铁皮外壳上用做地线。 4、9孔对电话线接口(MEDICA EasyBloodGas血气分析仪端为电话线口) 电话线一端:线头向下,金属片面对自己从左向右分别是1,2,3,4,5 电话线口---9孔串口 1--------------5
串口信号定义和作用以及接线方法
串口、并口接口定义 并行口与串行口的区别是交换信息的方式不同,并行口能同时通过8条数据线传输信息,一次传输一个字节;而串行口只能用1条线传输一位数据,每次传输一个字节的一位。并行口由于同时传输更多的信息,速度明显高于串行口,但串行口可以用于比并行口更远距离的数据传输。 1、25针并行口插口的针脚功能: 针脚功能针脚功能 1 选通(STROBE低电平) 10 确认(ACKNLG低电平) 2 数据位0 (DATAO) 11 忙(BUSY) 3 数据位1 (DATA1) 12 却纸(PE) 4 数据位2 (DATA2) 13 选择(SLCT) 5 数据位3 (DATA3) 14 自动换行(AUTOFEED低电平) 6 数据位4 (DATA4) 15 错误观点(ERROR低电平) 7 数据位5 (DATA5) 16 初始化成(INIT低电平) 8 数据位6 (DATA6) 17 选择输入(SLCTIN低电平) 9 数据位7 (DATA7) 18-25 地线路(GND) 2.串行口的典型代表是RS-232C及其兼容插口,有9针和25针两类。25针串行口具有20mA电 流环接口功能,用9、11、18、25针来实现。其针脚功能如下: 针脚功能针脚功能 1 未用 2 发出数据(TXD) 11 数据发送(一)
3 接受数据(RXD) 12-17 未用 4 请求发送(RTS) 18 数据接收( ) 5 清除发送(CTS) 19 未用 6 数据准备好(DSR) 20 数据终端准备好比(DTR) 7 信号地线路(SG) 21 未用 8 载波检测(DCD) 22 振铃指示精神(RI) 9 发送返回( ) 23-24 未用 10 未用25 接收返回(一) 9针串行口的针脚功能: 针脚功能针脚功能 1 载波检测(DCD) 6 数据准备好(DSR) 2 接受数据(RXD) 7 请求发送(RTS) 3 发出数据(TXD) 8 清除发送(CTS) 4 数据终端准备好(DTR) 9 振铃指示(RI) 5 信号地线(SG) 串口通信基本原理及接线方法 目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。最为简单
stm32 串口中断总结
本文以USART1为例,叙述串口中断的编程过程。 1、先来讲述一下在应用串口中断时涉及到的一些库文件。 首先对于STM32外设库文件的应用编程,misc.c和stm32f10x_rcc.c是肯定要添加到。 接下来就是我们要用到的相关外设了。毫无疑问,串口文件stm32f10x_usart.c是必须的。串口通信是对通用GPIO端口引脚的功能复用,所以还需要stm32f10x_gpio.c文件。另外,因为有中断的产生,所以中断文件stm32f10x_it.c也是必要的,当然这个文件一般和main.c 放在一个文件夹下(一般习惯为User文件夹),因为我们的中断响应函数是要在里面自己编写的。 当然还有其他的基本必须文件如系统配置文件等在这地方就不说了,这个是创建一个工程应该知道的。 2、初始化 对于串口通信的初始化,不仅仅只是对串口的初始化(这个地方是比较烦人的,不像别的芯片那样简洁明了)。 ●?首先时钟使能配置。STM32内部的时钟有很多,感兴趣的自己看看参考手册。此处 以USART1为例说明。有USART1时钟、GPIOA时钟、GPIO复用(AFIO)时钟。由于 此处USART1和GPIOA、AFIO均在APB2上,所以可以一次配置完成。如下: RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO|RCC_APB 2Periph_USART1 ,ENABLE); ●?其次中断配置。主要有优先级组设定、USART1中断使能、该中断的优先级,中断初 始化。程序如下: void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//选择分组方式0 /* 使能 USART1中断 */ NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } ●?然后GPIO复用功能配置。一般情况下我们使用原始的外设和GPIO端口引脚的映射 关系,如果要改变其映射的话,请另外查看参考手册上关于GPIO重映射部分。对 于GPIO的复用,其引脚的输入与输出模式都有要求,在参考手册上有详细说明。 void GPIO_Configuration(void) { GPIO_InitTypeDef GPIO_InitStructure; /* 配置 USART1 Rx 作为浮空输入 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(USARTy_GPIO, &GPIO_InitStructure); /* 配置 USART1 Tx 作为推挽输出 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
测试电脑的串口是否是好的 最完整最可靠的方法 就是 连接一个真实 的串口通信线路
测试电脑的串口是否是好的最完整最可靠的方法就是连接一个真实的串口通信线路,2 端用相应软件,如串口调试助手之类的,相互发送发送数据,看另外一端是否能正常接收! 当然,也可以简单的单台机器测试,即短接串口的2、3 两针,用相应软件,如串口调试助手,发送数据,看能否回显发送的数据 串口测试工具使用说明之一——串口调试工具 回复 6 | 人气1387 | 收藏 | 打印 | 推荐给版主 分享文章到: ye_w 个人主页给TA发消息加TA为好友发表于:2010-09-30 19:52:48 楼主 使用串口实现网络通讯,不仅仅需要熟悉控制双方的指令和相关的协议,而且还需要善于使用串口测试工具。在串口测试工具中,最常用的就是串口调试工具。这个串口调试工具网络上一大把,大家百度一下就能下载到(包括我逐步发布的调试工具,都不会提供资源,请大家直接去网络上查找),常用的包括:串口调试助手,串口精灵,Comm等。我也一直使用串口调试助手,下面就是用图形并茂的方式来介绍,请大家指出不足,以便共同进步。 串口调试助手,网络上的版本也有不少,我截2个不同版本的图,但本质没有区别 版本一 怎样测试串口和串口线是否正常 一步:把串口线或者USB转串口线插到计算机上。 二步:打开串口调试助手
接着选择串口,串口线和USB转串口的端口号查看路径: 电脑上--右键--属性--硬件--设备管理器-端口(COM和LPT),点 开端口前面的+号查看即可。 注释:1、USB-SERIAL CH340(COM4)就是USB转串口的端口号 2、通讯端口(COM1)是计算机原来自带的端口号 第三步:设置串口调试助手(见下图) 1、串口:COM4是和串口线或者USB转串口线在上述路径中查看到的端口号。 2、发送的字符/数据:图片上输入的是59,你可以随便输入2位数字。 3、其余设置按照下图。
STM32个人总结
基础入门编 1.搭建开发环境 详情看光盘资料,主要是软件安装和设置。 2.新建工程 可以直接用模板,了解每个文件的含义,会使用chm帮助。 3.STM32库 库的含义。 4.GPIO流水灯 认识RCC,GPIO的各种模式,寄存器的种类和作用。 5.POLLING按键 主要介绍了各种模式,实验通过不断读取GPIO的状态以达到判断按键的目的。 6.EXTI按键 使用了GPIO的EXTI中断来判断按键,记住EXTI要开AFIO(重映射也要开),另外SYSTICK不归NVIC管。注意NVIC_IRQChannelSubPriority(),最多可以判断16种优先级,即16种中断,同一个中断入口的引脚引发的中断也算是同一种中断,同种种中断不能相互嵌套。(响应优先级是在抢占优先级相同时,同时发生才有用,其中一个发生后无用)。 7.SYSTICK 关键是SYSTICK的初始化函数,了解那几个寄存器的作用和特殊的宏定义(就是选择自己想选择的位),根据配置可以延时不同的时间,详情看代码。 8.串口通信 开启相应RCC,做好Iint,配置好中断(可选,主要用于接收),然后弄好fputc(),可以直接用printf()直接输出。 9.DMA 不经CPU处理直接相互传输,开启相应的DMA,配置好from..to..,字节大小等,用cmd 命令后可以开启传输。 10.ADC(DMA) 主要就是初始化好ADC,什么通道模式之类的,详情看代码,由于使用了DMA模式,要配置好DMA,有ADC_DMACmd()开始传输。 11..FSMC显示英文 用FSMC直接写入液晶的控制芯片的显存,注意使用的是16位的颜色,线的接法要注意(RGB为5:6:5)。 由于用的是模拟的方法,输入数据时用的都是宏,该地址线用来作为C/D,16位是往前移了一位的,因此要乘以2. 值得注意的是开窗的显示手法,在显示字符前先“开”一个窗,当一行数据写完时,自动换到下一行继续写。 在写数据的函数那里可以更换字的背景色,也可以修改该函数的.h的BACKGROUND 的宏定义。 FSMC的初始化暂时不清楚,应该是关于NOR FLASH的。控制代码是配好的,具体的设置看参考文档(有关定位坐标和扫描方式都与此有关)。 (NOR-FLASH 有4个bank,NE[3:0],区分不同的bank,实验用NE1;DataAddress_Mux 数据域地址线复用;8位地址线25:0->24:0 16位地址线25:1->24:0,宏定义是16位的地址线,对应的机内地址*2左移1位) 12.IIC-EEPROM