螺旋CT原理
螺旋CT起源及其原理
1.起源
关于螺旋CT的研究结果首先在1989年的北美放射协会年会上提出。技术上的先决条件是引入了连续旋转扫描。以今天的观点来看,那只是逻辑上将螺旋与新的扫描技术结合到一起。当时的连续旋转扫描的发展和引入瞄准的只是缩短扫描时间和为动态CT提供更好
的性能,并没有认识到螺旋CT。
最早提及螺旋CT的都来自一些相互没有联系的资料,关于螺旋扫描的专利也不存在。因为所包含的连续数据采集和病人的连续进床被认为只是测量放射学所使用的技术,并且重建算法也没有取得专利。直到90年代才达成一致意见将算法申请专利。Mori的一个专利-螺旋算法是第一个关于螺旋CT的专利文字,但是由特定的电子电路来确定专利的所有权。这些对于现在的发明者毫无价值,因为硬件部分无法升级,而且新的算法层出不穷。
直到1993年,才出现了关于日本的螺旋CT的英文报道。
Kalender(德国)和V ock(瑞士)于1988年开始在螺旋CT领域进行研究并于1989年进行了关于螺旋CT的物理测量和临床研究。Bresler和Skrabacz的螺旋扫描原理的理论研究与这一发展同步,但是关于此方面的新知识出现。这一工作被一个美国的厂商资助,已经研究出扫描的模型,但当时由于图像质量的问题没有投入临床使用。
常规CT有两个不可忽略基本要求:在数据采集过程中,被扫描的物体没有移动;扫描轨迹必须在一个极好的平面上。如果这两个条件之一受到干扰,结果可想而知,会对图像质量带来负面影像。如果病人移动或体内器官的运动,就可导致运动伪影。如果病人很合作且没有移动,同样要求在床通过探测野时的平稳性。第二个要求也是这样。由于热效应和机械不精确性,X线球管焦点偏离设定的轨迹,当焦点和探测器不在同一平面时,可增加图像的伪影。后者对EBCT扫描影响很大。通常发生以上所说的情况时,无法采集到连续的数据,因为扫描系统没有显示出与不同角度一致的层面。这种不连续大多数情况下导致
可见的伪影。
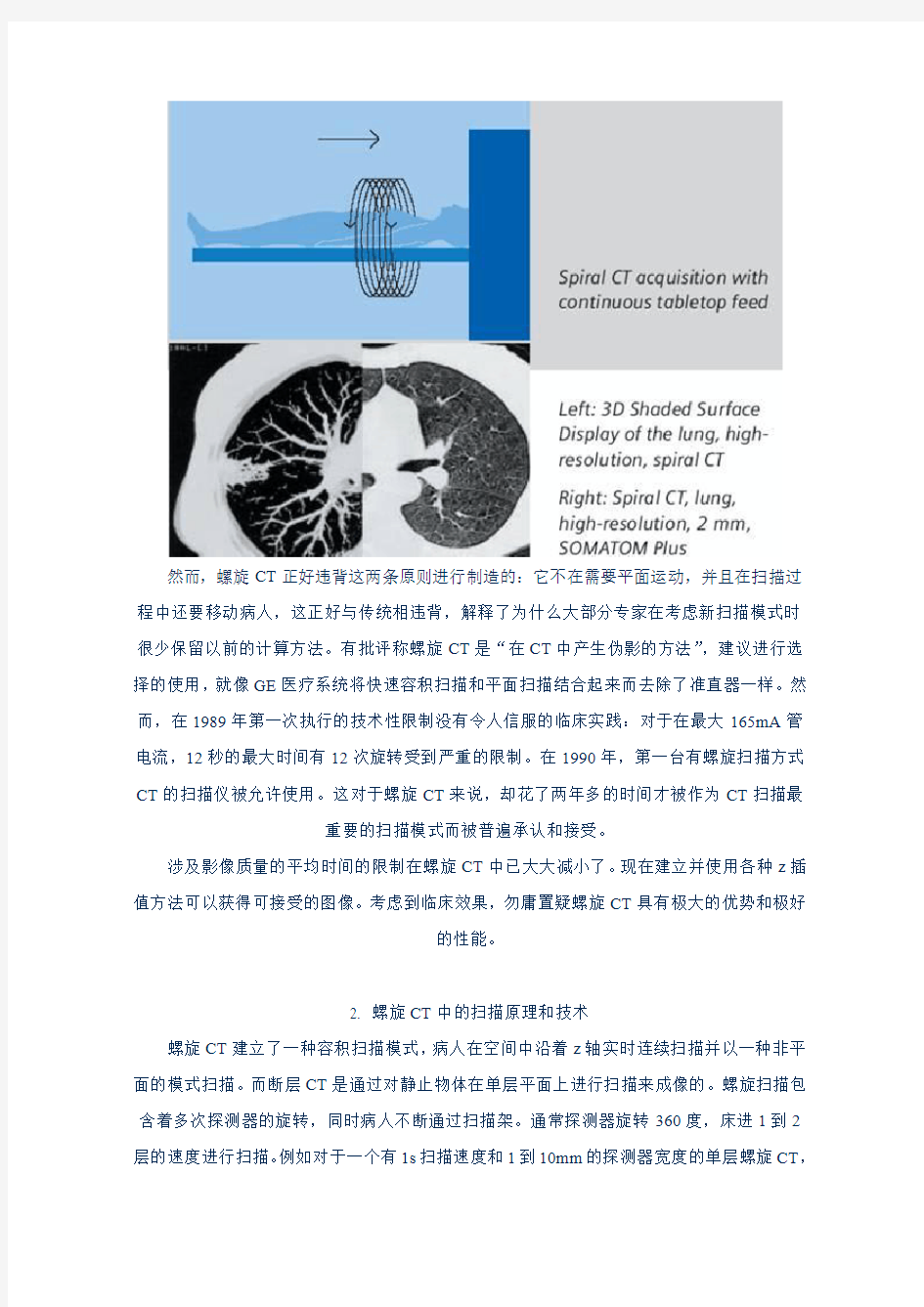
然而,螺旋CT正好违背这两条原则进行制造的:它不在需要平面运动,并且在扫描过程中还要移动病人,这正好与传统相违背,解释了为什么大部分专家在考虑新扫描模式时很少保留以前的计算方法。有批评称螺旋CT是“在CT中产生伪影的方法”,建议进行选择的使用,就像GE医疗系统将快速容积扫描和平面扫描结合起来而去除了准直器一样。然而,在1989年第一次执行的技术性限制没有令人信服的临床实践:对于在最大165mA管电流,12秒的最大时间有12次旋转受到严重的限制。在1990年,第一台有螺旋扫描方式CT的扫描仪被允许使用。这对于螺旋CT来说,却花了两年多的时间才被作为CT扫描最
重要的扫描模式而被普遍承认和接受。
涉及影像质量的平均时间的限制在螺旋CT中已大大减小了。现在建立并使用各种z插值方法可以获得可接受的图像。考虑到临床效果,勿庸置疑螺旋CT具有极大的优势和极好
的性能。
2. 螺旋CT中的扫描原理和技术
螺旋CT建立了一种容积扫描模式,病人在空间中沿着z轴实时连续扫描并以一种非平面的模式扫描。而断层CT是通过对静止物体在单层平面上进行扫描来成像的。螺旋扫描包含着多次探测器的旋转,同时病人不断通过扫描架。通常探测器旋转360度,床进1到2层的速度进行扫描。例如对于一个有1s扫描速度和1到10mm的探测器宽度的单层螺旋CT,
他的扫描速度为1-20mm/s。多排探测器和亚秒旋转时间的CT,床的速度可显著提高。从单
层探测器1s扫描速度的CT到一个4排探测器0.5s扫描速度的CT意味着速度可提高8倍。
X线球管的焦点的轨迹还是一个环形路径,但相对于病人,它是以螺旋路径运行的。Spiral CT和Helical CT表示的是一样的,都可在相关文献中找到。Spiral CT这一术语的出
现更有说服力,像“spiral staircase”“spiral binder”和其他通常使用的名字,而helical staircase
更加常用。根据权威字典,其作者和合著者在1989年选用spiral术语之前进行了商议。这
两个术语都应用于英语中特定的几何学。(注意:在德国数学符号中helical更适合,但为了
保证标准英语的使用而舍弃它)。
螺旋CT中参数的选择大部分对应于断层CT。参数值是可变的,部分参数由于螺旋扫
描模式的可能有限制。例如,螺旋扫描最大许可的管电流都低于断层扫描,为了避免因相
对延长曝光时间而导致的球管过热。现代的扫描装置一般允许超过100s的扫描时间并且管
电流达到350mA。这些已能满足临床的应用,现在又有了新的应用:多相增强检查,动态容积扫描,并且对较高各向同性分辨率的薄层扫描提出了更高的需求。
螺旋扫描必须多选择一个参数:每360度旋转床的位移d。代表90年代早期的标准单
层CT 1s旋转一次,实际对应的进床速度为d’mm/s。对于有0.5s到2.0s多个扫描时间的较
新的扫描器,不能再应用这一简单的关系。更重要的是要考虑同时扫描的层数M。床的移动d与总的层准直M?S的比通常作为pitch或pitch因子:
例如,对于一个四层的CT扫描装置,M=4,普通的层宽S=1mm和进床d=6mm每周,
其螺距为p=1.5。
螺距是一个无量纲的量,对于影像质量和剂量估计都非常重要。最近一些厂家误译并
混淆了螺距,认为是d/s。这是不可取的,因为丢失了螺距同影像质量和剂量的相互关系。
d/s=3这一比值被一厂家作为四排螺旋的“高质量”扫描协议,但模糊了扫描是在螺距为0.75
的重叠模式下进行这一事实,其结果是增加了扫描剂量。当使用更多或不同的探测器排数
M时,那情况就会变得更复杂;到今天多层CT可选择M=2或M=4。因此,一般都根据等式来确定。这是在厂家规则里达成一致的[IEC,1999]。
要想快速覆盖给定的扫描容积并相对断层CT减少剂量,通常选择1-2的螺距值,螺距因子应
于1。为了避免z轴采样时出现间隙,其值不能超过2。螺距因子的选择主要由实际情况决定。是所希望或一定范围R(mm)所接受的扫描时间T(s)的问题。进床d’=R/T(mm/s)是就结果
到选择的层宽和螺距因子,进床真正的设置是:
大部分现代扫描同时多层(m>2)采集的容量为可达到高容积扫描速度且薄层采集
(S<3mm)。另外由于技术的限制,螺距的选择还依赖于有效的算法和图像重建参数。
多层螺旋CT的应用
多层螺旋CT的应用 解放军总医院蔡祖龙 多层螺旋CT(multislice CT MSCT)是现代技术的结晶,是CT技术领域里的又一重大突破,也代表着当今CT的最高水平和发展方向。MSCT在1998年度RSNA上由部分厂家所推出。此后,其诸多优点和发展前景已经得到国际上的公认。短短两年多时间,MSCT的发展惊人。我国近两年来掀起了一股引进MSCT的热潮。其在临床上已得到了初步应用,取得了一定经验。可以相信MSCT在我国以更快的速度推广。 一、MSCT的主要技术特点 (一)多排探测器阵列 多排探测器阵列是MSCT的核心构件。MSCT中,将单层螺旋CT(Single spiral CT,SS-CT)的单排探测器(900个左右的探测器单位)改进为几排甚至几十排探测器,即MSCT在Z轴方向上有8-34排探测器,其总数达数万个,呈二维排列。 按探测器在Z轴上的排列方式主要有两类,即对称性的和非对称性的。前者以GE公司为代表,其探测器是对称等宽的。探测器宽度相当于层厚1.25mm(即探测器准真宽),材料为衡上陶瓷。Toshiba公司的探测器基本上也属等宽型,只是中央部有4排宽度为0.5mm,外周30排为1m m等宽探测器。Marconi和Siemens公司的MSCT探测器属不对称排列。为8排,每排探测器厚度不等,分别为名1、1.5、2.5、和5mm。 多排结构的探测器可通过不同的组合来确定扫描部位的层厚,以GE公司的Lightspeed QX/I型为例,如有4排探测器可得到4层1.25mm;如用8排探测器可得到4层1.25mm,用16排可得到4层5mm层的图像,或2层10mm的图像。(二)数据采集系统(digita ascquisition sy stem,DAS) DAS 是CT机中将穿过人体的X线信号转变为供重建图像所需的数字信号的重要部件。传统的C T中经准直器后宽度较窄的扇型X线束经人体后被探测器接受,经DAS 转为数字信号,而MSC T采用可调宽度的锥型线束进行扫描,根据拟采集的层厚来选择锥型线束的宽度,后者则可激发不同数目的探测器,从而实现一次采集可获得多层图像,在探测器与DSA之间设有电子开关回路,开关由球管侧的裂隙同步控制,用来变换体轴方向上探测器的数目,以此来控制扫描层的厚度并进行数据的采集和传输,亦即由各排被激发的探测器所采集的不同信息组合来决定厚度(未被激发的探测器处于关闭状态),每排探测器都有各自的开关控制,并同时控制准直器的宽度来控制扫描层面厚度,因此,SSCT的层厚由X线束准直宽决定,而MSCT的层厚则经上述特殊的DAS由探测器组合数决定,公式为:D(X线束准直宽度)=N(探测器列数)×D(探测器准直宽),因而MSCT探测器的准直宽为1/N倍的X线束准直宽,例如4列探测器的宽度为1.25,则N为4,d为1.25mm,X线束宽则为5mm。目前的MSCT的数据通道均为4组,故一次扫描360最多可同时采集4层图像数据,产生4幅(层)图像。MSCT扫描层厚的选择和组合有很大的灵活性。层厚可在0.5-10.0mm之间选择。 (三)、重建算法 目前由优化采样扫描(optimized sampling scan)和滤过内插法(filfer inferpolation)相结合而组成的。 1、优化采样扫描: SCT 一次扫描的范围取决于扫描时间和进床速度,因扫描时床在运动,每次扫描的起点和终点并不在一个平面,如将扫描数据连接重建图像,就会产生运动性伪影和层面错位。所以要对原始
多层螺旋CT图像后处理操作规范
多层螺旋CT图像后处理操作规范 一、颅脑 非外伤者:只拍头窗,以Axi图像为主,范围自穹窿至乳突下缘,定位线平行于听眦线,必要时做Cor或Sag重建,以病变为中心,并插入定位像,Cor定位线垂直于听眦线。 图像数4×6,1张。 外伤者:拍头窗及骨窗,重建方法相同,上半幅为头窗,下半幅为骨窗,骨窗必要时锐化处理 图像数6×8,1张。 VR图像:体位为:前后位、后前位、左右侧位、头侧位、足侧位(除去下颌骨和颈椎)、其它特殊体位。 图像数2×3=6或3×3=9幅,1张。 二、颅底: 骨窗 1. Axi:自筛板至乳突尖,定位线平行于听眶线 拍片数:6×7=42幅,1张 注意: 1.疑有脑脊液鼻漏 1)Cor:自额窦前壁至鞍背,定位线垂直于鼻道 2.疑有脑脊液耳漏 1)Axi:包括颞骨,定位线平行于听眶线 三、眼眶 眼眶外伤以骨窗为主,其它以软组织窗为主。 Axi图像:自眶上缘至下缘,定位线平行于视神经管,图像数20 Cor图像:以病变为中心重建,定位线垂直于听眦线,图像数20 Sag图像,必要时,以病变为中心重建 图像数:6×7=42、6×8=48,1张 VR图像:前后位、左前斜位、右前斜位、其它特殊体位。 拍片数:2×2、2×3,1张 当疑有眶内占位性病变时,要分别以Axi、Cor、Sag或斜面重建,以显示病变与眼球、视神经和眼肌等结构的毗邻关系,并做必要的测量。 四、鼻骨 以骨窗为主,软组织异常者加拍软组织窗 Axi图像:自鼻根点至鼻棘点,定位线垂直于鼻背,骨窗必要时锐化处理,常规图像数40幅 Cor/Sag/CPR重建:以病变为中心,常规2幅 图像数40+2=6×7,1张 五、副鼻窦 骨窗 1.Cor图像重建范围:自额窦前壁至鞍背,定位线垂直于鼻道,图像数5×6=30幅 六、中耳乳突 骨窗 1.Axi:自岩锥上缘至乳突尖,定位线平行于听眶线(图像数20)
多层螺旋CT螺距
随着多层螺旋CT的普及,螺距(pitch)成为螺旋CT很重要的扫描参数。螺距是扫描架旋转一周360°进床距离与透过探测器的X线束厚度之比,单层CT的X线束厚度等于探测器准直宽,即等于采集层厚宽度。 螺距的计算公式:P=S(mm)/D(mm) P:螺距 S:扫描架旋转一周360°进床距离 D:为X线束厚度 因多层螺旋CT应用了多排探测器阵列,所以,X线束被多排探测器分为多束更细的X 射线,透过探测器的X线束厚度以d(mm)表示,则:d(mm)=D(mm)/N其中:N为探测器排数。多层螺旋CT的螺距以P表示:则多层螺旋CT的螺距公式: P=S(mm)/D(mm)/N 螺距决定CT的容积覆盖速度,影响图象的质量。扫描区域确定后,其它扫描参数不变,增加螺距时,完成总的容积扫描时间将缩短,但获得的容积体积不发生变化,图像质量将受到影响。 那么如何更好的应用螺距(pitch),将从三个方面考虑:(1)扫描范围(2)扫描时间(3)图象质量 [pitch of screws] 螺纹上相邻两牙对应点之间的轴向距离,代号是P。 如果带电粒子进入均匀磁场B时,其速度v与B之间成θ角,则粒子将作螺旋运动。而粒子在磁场中回转一圈所前进的距离叫做螺距(h): h=2πmvcosθ/(qB) 单线螺纹的螺距等于导程,多线螺纹的螺距等于导程除以线数。螺距亦称牙距。 在英制中,以每一英寸(25.4mm)中的牙数来表明牙距。 螺旋CT的问世产生了一个新的概念,螺距(pitch,P)。对早期的单层螺旋,各厂家对此定义是统一的,即螺距=球管旋转360°进床距离/准直宽度。对于多层螺旋CT螺距的概念有点复杂,多层CT的一个准直宽度包含了多个相邻的图像。这样,厂家的不协商(或者说不妥协)导致了多层螺旋螺距公式中分母:准直宽度定义的混乱。例如:MARCONI等多层CT将整个准直宽度作为公式的分母(层数x单个准直器宽度),而GE等则将每一层图像的准直宽度作为分母。由于基础定义的混乱,造成了计算公式结果的混乱。前者无论是4、8还是16层,进床距离等于整个准直宽度时,计算结果螺距均等于1,而后者则不断变化,计算结果螺距分别等于4、8和16。这种不同厂家定义的混乱,造成了初接触多层CT者的困惑。 多层螺旋CT的技术原理及影像质量 多层螺旋CT的出现是CT技术革命性进步,各厂家相继开发出了4层、8层及16层螺旋CT。与传统螺旋CT相比,多层螺旋CT在成像原理、技术特点有明显的不同,图像质量也有明显的改进,本文介绍如下。 1 多层螺旋CT原理 1.1数据采集通道 数据采集通道数是决定X线管球旋转1周所能获得的图像层数, 目前各厂家推出的机型有2通道、4通道、8通道和16通道。有关专家估计,随着技术水平的发展,制造成本进一步降低,今后传统CT甚至单层螺旋CT将逐步被多层螺旋CT所取
多排螺旋CT与多层螺旋CT的区别
多排螺旋CT与多层螺旋CT的区别 时间:2009-01-23 17:04:36 来源:作者: 多层螺旋CT(Multi-slice CT)是指扫描一圈所得到的图像数,如4层CT就是扫描一圈出4层图像。 多排螺旋CT(Multi-detector 或Multi-row CT)是指组成CT的探测器排数,如16层CT有的是 24(Siemens,Philips,GE),有的是40排(Toshiba). 从理论上说,组成多层螺旋CT的排数约接近层数越好,这样可以减少探测器的间隔,减少噪声,但层厚的选择就少了。所以现在的多层螺旋CT的排数都大于层数(双层除外) 16层采集的螺旋CT设备继1999年的4层采集、2000年的8层采集设备问世之后一年度GE。PhilipS、Siemens和Toshiba四家公司均推出了16层采集的螺旋CT设备。 16层CT设备的探测器仍分为对称型(GE)与非对称型(PhilipS、Siemens、Toshiba)但采用非对型探测器的厂家在设计上已经与原4层和8层的设备有别如loshiba公司原来的设计是中间 05minx4列两侧分别为lmmxl5列,共34列【16层的设计为中间0.5mm x 16列两侧分别为lxl。。112列,共4D列。PhilipS和Siemens公司原来设计是中间1mmx2列,1.5mmx2列,Z.5mmxZ 列,5mmx2列,共8列;16层的设计为中间0 75mm x 16列,两侧分别为15mm。4列,共24列。 根据上述设计,最薄的采集层厚分别为0.5mm(Toshiba)。0.625mm(GE)和0.75mm(Philips 和SIemen。).最薄层厚将决定Z轴分辨力而层厚则依赖于每列探测器宽度的设计O 16层CT探测器设计有不同的侧重。选择尽可能薄的层厚者目的在于实现真正的各向同性体素采集(0.smm x 0.smm x0.5mm)从而达到最佳的各类重建效果;采用略厚层厚者的目的在于在保持基本的各向同性体素采集的基础上适应16层采集中的锥形线束采集与重建方式及达到更好的曝光剂量效率(exposure dose efficle。-cy).如Siemeel。公司的材料显示,4层采集时的曝光剂量效率为70%075mm层厚的16层采集时曝光计量效率则为85%。 16层设计的采集时间一般为0.5描(全周扫描),最低可达0.42秒,以一个身高155cm 的病人为例,以 2.5mm层厚采集将可在19-22秒钟完成全身的扫描明显提高了扫描的单位时间覆盖率。对包括心脏在内的动态器官全部可以实现一次屏息采集、这是4层采集的CT尚不能完全实现的。(二)和16层采集的螺旋CT相关的技术进展 1 锥形线束算法随锥形线束覆盖的探测器列数与宽度增加,螺旋扫描中信息采集的几何学误差会进一步增大因而锥形线束地影会比4层和8层者更严重。为此已发展了相应的16层采集锥形束扫描重建算法。如为了对应采集平面的位相而采用的倾斜成像平面采集算法2螺旋滤过伴交叉校准算也非线性插入重建算法;一次采集16层的原始数据然后作逐层二次重建算法等。这些新的重建算法目标在于减少锥形线束伪影;保证Z轴上的分辨力和保证采集速度。 2 降低扫描剂量和最初厂家介绍多层采集的螺旋CT设备时谈到的重要优点一“因采集层面呈4的倍数增加故射线剂量将减低相应由于多层采集时采集层厚很薄每次扫描覆盖的范围通常比单层螺旋CT大,以及采集中的剂量效率因素等,放实际的病人受线量在扫描范围内会明而增加而不是降低尽管和4层扫描设备相比8层设备的扫描剂量有所降低(约30%)但16层设备的扫描剂量则明显增高。在16层扫描设备上采用了以下降低剂量的措施: (1)智能滤过技术根据扫描方案,采用智能方式自动设置X线滤过当增加smm铝当量的钛滤过片时,在不降低图像锐度的情况下可使X线剂量不仅不增加,反而降低达一半,巨图像噪声也下降。(2)自动mA调制根据开始扫描后检测器反馈的信息,自动调节m输出以达最低剂量的技术,可降低15%左右的扫描剂量。(3)自动mA设置不再使用正位定位像,仅采用侧位定位像来决定身体不同部位的扫描mA值,包括设法降低敏感器官的剂量大约可降低25%左右的扫描剂量。(4)可变速扫描和期相选择性曝光技术二者均是用于降低心脏扫描剂量的技术。可变速扫描技术是去年已经提出的,根据病人的心动周期特别是心律不齐者,调节扫描速度的方式。期相选择性曝光
多层螺旋CT螺距
随着多层螺旋CT 的普及,螺距(pitch)成为螺旋CT 很重要的扫描参数。螺距是扫描架旋转一周360°进床距离与透过探测器的X 线束厚度之比,单层CT的X 线束厚度等于探测器准直宽,即等于采集层厚宽度。 螺距的计算公式:P=S(mm)/D(mm) P :螺距S :扫描架旋转一周360°进床距离 D :为X 线束厚度 因多层螺旋CT 应用了多排探测器阵列,所以,X 线束被多排探测器分为多束更细的X 射线,透过探测器的X 线束厚度以d(mm)表示,则:d(mm)=D(mm)/N 其中:N 为探测 器排数。多层螺旋CT的螺距以P表示:则多层螺旋CT的螺距公式: P=S(mm)/D(mm)/N 螺距决定CT 的容积覆盖速度,影响图象的质量。扫描区域确定后,其它扫描参数不变, 增加螺距时,完成总的容积扫描时间将缩短,但获得的容积体积不发生变化,图像质量将受到影响。 那么如何更好的应用螺距( pitch ),将从三个方面考虑:( 1)扫描范围( 2)扫描时间 ( 3) 图象质量 [pitch of screws] 螺纹上相邻两牙对应点之间的轴向距离,代号是P。 如果带电粒子进入均匀磁场 B 时,其速度v 与 B 之间成θ 角,则粒子将作螺旋运动。而粒子在磁场中回转一圈所前进的距离叫做螺距(h): h=2πmvcosθ/(qB) 单线螺纹的螺距等于导程,多线螺纹的螺距等于导程除以线数。螺距亦称牙距。在英制中,以每一英寸( 25.4mm )中的牙数来表明牙距。 螺旋CT 的问世产生了一个新的概念,螺距( pitch,P )。对早期的单层螺旋,各厂家对此定义是统一的,即螺距=球管旋转360°进床距离/准直宽度。对于多层螺旋CT螺距的概念有点复杂,多层CT的一个准直宽度包含了多个相邻的图像。这样,厂家的不协商(或者说不妥协)导致了多层螺旋螺距公式中分母:准直宽度定义的混乱。例如:MARCONI 等多层CT将整个准直宽度作为公式的分母(层数x单个准直器宽度),而GE等则将每一层图像的准直宽度作为分母。由于基础定义的混乱,造成了计算公式结果的混乱。前者无论是4、8 还是16 层,进床距离等于整个准直宽度时,计算结果螺距均等于1,而后者则不断变化,计算结果螺距分别等于4、8 和16。这种不同厂家定义的混乱,造成了初接触多层CT者的困惑。 多层螺旋CT的技术原理及影像质量 多层螺旋CT 的出现是CT 技术革命性进步,各厂家相继开发出了 4 层、8 层及16 层螺旋CT。与传统螺旋CT相比,多层螺旋CT在成像原理、技术特点有明显的不同,图像质量也有明显的改进,本文介绍如下。 1多层螺旋CT 原理 1.1数据采集通道数据采集通道数是决定X 线管球旋转1 周所能获得的图像层数,目前各厂家推出的机型有2 通道、4通道、8 通道和16 通道。有关专家估计,随着技术水平的发展,制造成本进一步降低,今后传统CT甚至单层螺旋CT将逐步被多层螺旋CT所取代,尤其是性价比有优势的双层螺旋会更加普及。 1.2探测器
多层螺旋CT螺距完整版
多层螺旋C T螺距 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
随着多层螺旋CT的普及,螺距(pitch)成为螺旋CT很重要的扫描参数。螺距是扫描架旋转一周360°进床距离与透过探测器的X线束厚度之比,单层CT的X 线束厚度等于探测器准直宽,即等于采集层厚宽度。螺距的计算公式: P=S(mm)/D(mm) P:螺距S:扫描架旋转一周360°进床距离D:为X线束厚度因多层螺旋CT应用了多排探测器阵列,所以,X线束被多排探测器分为多束更细的X射线,透过探测器的X线束厚度以d(mm)表示,则:d(mm)=D(mm)/N 其中:N为探测器排数。多层螺旋CT的螺距以P表示:则多层螺旋CT的螺距公式: P=S(mm)/D(mm)/N 螺距决定CT的容积覆盖速度,影响图象的质量。扫描区域确定后,其它扫描参数不变,增加螺距时,完成总的容积扫描时间将缩短,但获得的容积体积不发生变化,图像质量将受到影响。那么如何更好的应用螺距(pitch),将从三个方面考虑:(1)扫描范围(2)扫描时间(3)图象质量 [pitch of screws] 螺纹上相邻两牙对应点之间的轴向距离,代号是P。 如果带电粒子进入均匀磁场B时,其速度v与B之间成θ角,则粒子将作螺旋运动。而粒子在磁场中回转一圈所前进的距离叫做螺距(h):h=2πmvcosθ/(qB) 单线螺纹的螺距等于导程,多线螺纹的螺距等于导程除以线数。螺距亦称牙距。 在英制中,以每一英寸(25.4mm)中的牙数来表明牙距。螺旋CT的问世产生了一个新的概念,螺距(pitch,P)。对早期的单层螺旋,各厂家对此定义是统一的,即螺距=球管旋转360°进床距离/准直宽度。对于多层螺旋CT螺距的概念有点复杂,多层CT的一个准直宽度包含了多个相邻的图像。这样,厂家的不协商(或者说不妥协)导致了多层螺旋螺距公式中分母:准直宽度定义的混乱。例如:MARCONI等多层CT将整个准直宽度作为公式的分母(层数x单个准直器宽度),而GE等则将每一层图像的准直宽度作为分母。由于基础定义的混乱,造成了计算公式结果的混乱。前者无论是4、8还是16层,进床距离等于整个准直宽度时,计算结果螺距均等于1,而后者则不断变化,计算结果螺距分别等于4、8和16。这种不同厂家定义的混乱,造成了初接触多层CT者的困惑。 多层螺旋CT的技术原理及影像质量
多层螺旋CT的技术概况
多层螺旋CT的技术概况 [摘要]多层螺旋CT(MSCT)是CT发展史上的又一次重大突破。它的巨大优越性已体现在临床应用中的诸多方面。合理恰当地应用MSCT一定需建立在对其技术的系统了解之上。文内介绍了MSCT的技术要点。 滑环技术引入CT设备而使得螺旋CT(spiral or helical CT)常规应用于临床诊疗工作,取得的成就是公认的,但在许多病情(如肺动脉栓塞、某些脏器多时相动态研究、CT血管造影以及创伤等)时力求短时影像显示,须所谓容积扫描覆盖速度(volume coverage speed)的进一步提高以满足临床需要,目前多层螺旋 CT(multislice CT,MSCT)的涌现即为实现上述目的迈出的巨大一步。 MSCT是“宽探测器多层采集螺旋CT”的简称,也被称为多排探测器CT(multidetection-row CT,MDCT)、探测器阵列CT。它是1998年度RSNA上推出的螺旋CT换代产品,为世人瞩目。 一、MSCT的技术要点 MSCT与以往单层螺旋CT(single slice CT,SSCT)相比较,其特点在于它在探测器结构和数据处理系统(DAS)两方面作了根本性的改进,也是与SSCT的主要区别点。 (一)多排探测器阵列 多排探测器阵列可谓MSCT的心脏。MSCT中将SSCT的单排探测器(900个左右的探测器单位)改进为几排甚至几十排探测器,即MSCT在Z轴方向上有数万个探测器呈二维阵列,目前的设计为8-34排。 目前拥有MSCT的四家公司(GE,Toshiba,Marconi,Siemens公司)所进行的探测器设计在Z轴排列方式主要有两类,即对称性和非对称性排列方式。GE公司的MSCT设计的16排是对称等宽的,探测器宽度相当于层厚为1.25mm(即探测器准直宽),材料为稀土陶瓷。 Marconi 和Siemens公司的MSCT探测器排列为8排,每排探测器厚度不等,分别为1、1.5、2.5和5mm。Toshiba公司的探测器共有34排,基本也属等宽型,只是中央部分有4排宽度为0.5mm,外周30排为 1mm等宽探测器。