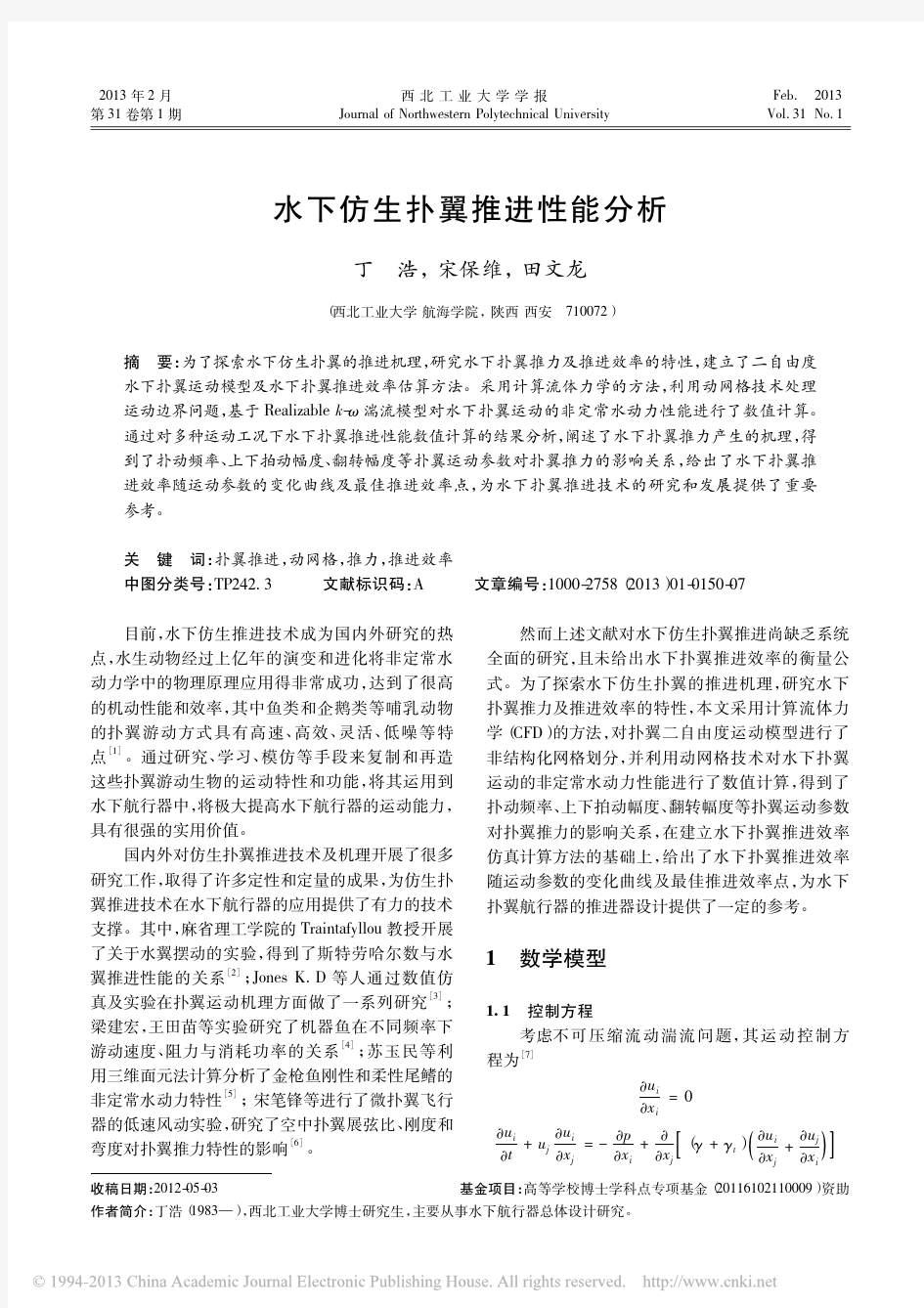
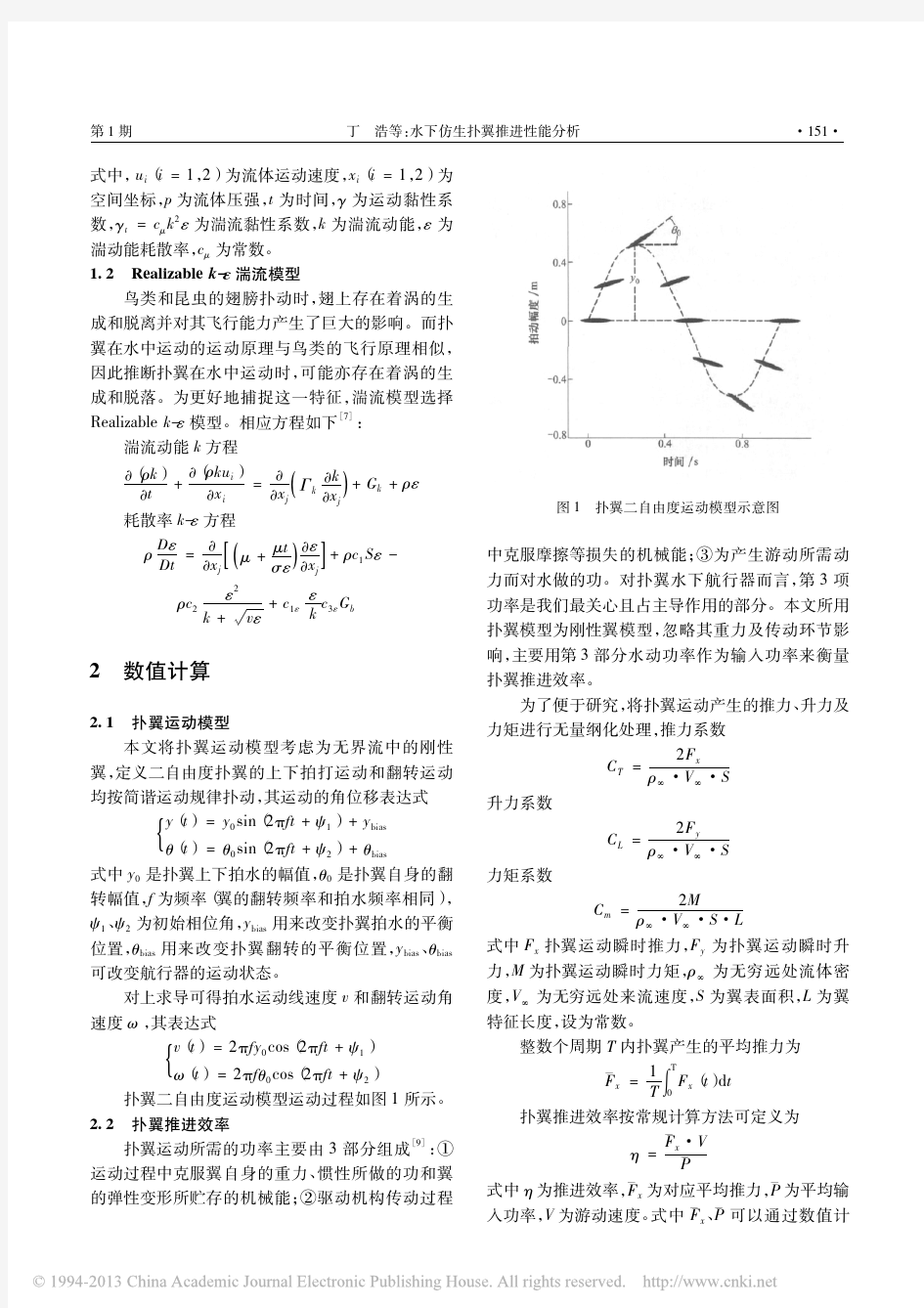
水下仿生扑翼推进性能分析_丁浩
基于混合推进方式的水下仿生鱼机器人研究设计
基于混合推进方式的水下仿生鱼机器人研究设计 发表时间:2019-06-11T10:57:56.553Z 来源:《科技研究》2019年3期作者:姜志斌[导读] 论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。 (南京工程学院 211100) 摘要:论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。 关键词:混合推进式;仿生;机器人设计 1 水下仿生鱼机器人概述 1.1 水下机器人的背景 随着全球经济、科研活动的深入发展,地球的陆地资源正在逐步减少,有朝一日终将会被挖掘殆尽。而地球表面60%以上是海洋,海洋中蕴藏着比陆地上更加丰富的自然资源。 而面对海洋这么大的面积,使用机器取代人力是必然的发展趋势。目前机器人发展迅速,海底机器人正变得越来越重要。 1.2 仿生机器人的起源 科学家们通过将仿生学和机器人两大学科相结合,提出了水下仿生机器人这一概念,水下仿生机器人根据海洋生物的外形结构和运动方式进行设计,由于海洋生物进过了长期的进化,其外形结构能够很好地适应水下的环境,因此设备运用仿生的理念能帮助人类更好地了解海洋。 美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。研究人员于1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。紧接着,英国赛克斯大学(Essex)就以鱼类结构为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线和转向问题。而美国海洋学中心则是把对生物模仿得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”,按照龙虾的身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。 1.3 水下仿生鱼机器人的设计意义 水下仿生鱼机器人用途广泛,涉及到各个领域。在民用方面,通过采集水下图像可完成资源勘探、海洋生物研究、海底地势地貌绘制、海底管道检修、鱼群监测、地理研究、水质采用等等。在军用方面,可以为水下机器人加装声呐、排雷装置等,从而执行特定的军事任务,如定点监控、海底侦查、信息传输、协同作战等等。由此可见,水下仿生鱼机器人的设计具有很大的发展前景,如何合理地设计水下仿生鱼的外观结构,使其实现相应的功能尤为重要。 1.4水下仿生鱼机器人的使用设定 常规的水下仿生鱼机器人由于要实现各种功能导致其本身体积太大,从而引发了不够灵活、耗能严重等各种问题。比如“海筝Ⅱ型”遥控自治水下机器人,其主尺寸有1.2m*0.5m*0.25m,自带锂电池,但只能在水下工作6h,过短的作业时间成为其不足之处。因此,本次设计在功能方面只打算保留其摄像、信号发送接收这些基本功能,在设定上算是一种探测类机器人,好处是结合混合推进的运动方式其可以延长水下工作周期,大量地投放可以对某片区域进行长期的监测,通过信号传递告知人们其探测到的相关信息,然后再由工作人员对其传回的信息进行分析,针对某一问题进行解决,这样可以节省大量的人力物力。 2 混合推进运动方式概述 2.1 混合推进运动方式的概念 所谓混合推进这种运动方式即设备不仅仅是靠单一的推进方式来运动。首先,设计的水下仿生机器人在造型上选择模仿鳐鱼这类鱼类的外观,宽大的机身使得设备能够很好地悬浮在水中,然后通过周围水流的波动来带动设备前进后退等等,这方面即为外力推进。与此同时,设备本身留有一定的空间来放置发动电机,通过电机带动螺旋桨来推动设备前进,这点即为自身推进。设备总体而言就是靠这两种方式来实现自身运动。 2.2 混合推进方式的优点 混合推进式这个概念的提出是基于一个设备要在水下进行长期作业的大前提。目前已有的水下机器人设备有一个通病,即设备并不能在水下长期作业,要定期通过人工检测、维护、更换动力电源。因此针对这方面的缺陷现提出混合推进这一概念,设备投放至水下后,暂时先不启用其自身携带的推进装置,使其在洋流的推动下被动运动,这样设备就能在水下进行长期的作业,同时其运动的范围更加的广泛,采集到的数据更加随机,不刻意地设定探测区域往往能够带来一些意想不到的结果。只有在紧急状况下,通过水下机器人自身传回的信号提示,操作人员再通过手动操作的方式来启动其自身所携带的推进装置,对机器人进行回收、障碍撤离等等。多种推进方式相结合的模式拥有使设备的作业时间更长久,采集的数据更广泛等等优点。 3 外观设计要点 3.1 外观设计灵感 设备在外观方面采用了仿生的设计方式,造型模仿了鳐鱼这类鱼类的外观,具有扁平宽大的特点,这种造型使得设备具有一定的浮力,能够很好地悬浮于水下。同时仿生的外观可以使设备很好地融入进生物之间,不容易被水下生物所排斥,从而能够采集到更多的信息。另外仿生的造型也具有一定的隐蔽性,为设备在水下长期作业不被外界因素影响提供有力条件。 3.2 设计的优点 总的来说这种混合推进方式的水下仿生鱼机器人具有以下几点优点:1.作业时间长,能够在水下长时间地工作,从而使得采集到的信息更加完整;2.对能源的调配合理,设备在水下大部分的时间都是通过洋流的推进来改变自身的位置,能够很好地减少自身的能源消耗,从而达到长期作业的目的;3.设备适应面广泛,能够进行前后左右上下多姿态的调整,能够适应不同的状态;4.隐蔽性良好,仿生的设计使得设备能够更好地融入到环境中,这样其遭遇外力影响甚至破坏的几率就会相对降低。
水下推进器选型计算
水下推进器计算及选型 1.已知参数及条件 可双渠道供水,单渠渠宽3 m,渠有效长约128 m,水深4.1 m,日供水6万T,日取水量6.54万T,平时为单渠道供水。渠内正常供水时,水流速为0.1 m/s,含沙量为20~40mg/l,沙粒直径0.1~2mm,每月排沙一次,排沙时,推进器启动前两端闸门关闭,则渠内水流动速度为0 m/s,推进器启动后要使明渠内水中泥沙经推进器搅拌及推动而不沉淀渠内水流动速度应不小于2m/s。 2.渠内水中启动推力的计算 设计院经过设计计算,确定要使渠内水中泥沙流动而不沉淀,其水流速应不小于2m/s。要使渠内水的流速达到设定值,根据动量定理,设作用在水上的合外力即推进器对水的推力为F,则有 F=ρQ(β2ν2-β1ν1)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈(1)式中ρ—液体密度(kg/m3),这里为砂水混合后的密度; Q—渠内过水流量(m3/s); β1、β2—动量修正系数,工程实际应用时可取β1=β2=1; ν1、ν2—渠内过水前、后流动速度(m/s)。 又知,Q=Aν2=Bhν2 式中A—渠内过水截面积(m2); B—渠宽度(m); h—渠内水深(m)。 则(1)式变为 F=ρBhν2 (ν2-ν1)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈(2)从前面工程设计参数中已知 B=3(m);h=4.1(m);ν2=2(m/s);ν1≈0(m/s);含沙量取30mg/l=30 g/ m3 =0.03 kg/m3 液体密度ρ可通过下面公式求得。 液体密度ρ=(单渠每月沉沙量+单渠内纯净水质量)/单渠内沙水混合体积。 而单渠每月沉沙量=单渠每月过水量×平均含沙量=(日取水量×30)×平均含沙量=(65400×30)×0.03=58860( kg)。 单渠内沙水混合体积=渠宽度×渠内水深×渠长=3×4.1×128=1574.4(m3) 沉沙应占体积=每月沉沙量/沙的理论密度=58860/1000/2.65=22.21(m3) 渠内水应占体积=单渠内沙水混合体积-沉沙应占体积=1574.4-22.21=1552.19(m3) 单渠内纯净水质量≈渠内水应占体积×纯净水密度 =1552.19×1000=1552190 (kg)
水下推进器安全操作规程通用版
操作规程编号:YTO-FS-PD398 水下推进器安全操作规程通用版 In Order T o Standardize The Management Of Daily Behavior, The Activities And T asks Are Controlled By The Determined Terms, So As T o Achieve The Effect Of Safe Production And Reduce Hidden Dangers. 标准/ 权威/ 规范/ 实用 Authoritative And Practical Standards
水下推进器安全操作规程通用版 使用提示:本操作规程文件可用于工作中为规范日常行为与作业运行过程的管理,通过对确定的条款对活动和任务实施控制,使活动和任务在受控状态,从而达到安全生产和减少隐患的效果。文件下载后可定制修改,请根据实际需要进行调整和使用。 1、水下推进器启动前检查电机定子绕阻对地绝缘电阻,最低不得低于50兆欧,检查接地是否牢固、电缆绑扎是否合理及叶轮旋转方向。 2、在确认可以启动后,手动状态下现场人员直接按绿色〖启动〗按钮启动,自动状态下通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。 7、在接到生产部关闭指令后,手动状态下按红色〖停
北京大学科技成果——RoboShark智能仿生深海潜航器
北京大学科技成果——RoboShark智能仿生深海潜航器 项目简介 本项目产业化的市场定位为需要长时间、远航程可进行水下目标侦测及定位的单位。RoboShark智能仿生深海潜航器采用鲨鱼为原型,以三关节仿生尾鳍取代无刷推进器,有效降低设备运行噪声的同时节省了能量消耗。设备外壳采用吸音材料制成,可以提高设备的隐蔽性。通过重力舱吸排水实现设备的上浮下潜,控制更为灵活,具有定点悬停、定深巡游等多种智能运动功能,最大下潜深度可达1000m。 此潜航器的主要特点: 1.节能高效:采用仿生+滑翔作为动力源,利用反卡门涡街的驱动原理,仿生推进效率高达80%; 2.隐蔽环保:模拟鲨鱼的外形与游动方式,隐蔽性强,对环境扰动小,不会伤害水下生物; 3.安全可靠:采用整体开放,局部密封的设计,配备六方向避障
传感器,具有低电量返航、失联返航等功能; 4.载荷扩展:可搭载声、光、电、磁传感器,满足水下通信、水下定位和水下探测等需求。 应用范围 RoboShark具有长续航、低噪音的优势,适合用于长时间的水下巡游、水下追踪等任务。可完成海洋勘探,包括海洋科考、水质监测、地貌测绘等任务;水下作业,包括海底管道检测、水下打捞、大坝巡检等任务;军事上可应用于目标侦查、搜寻、定位及排爆等复杂任务。RoboShark多关节仿生机器鱼根据应用场景和使用需求,除高精度GPS、深度计、九轴姿态传感器以及远距离射频通信等标准模块外,还可以搭载声呐设备、水声通讯设备,进一步的丰富产品功能。 项目阶段 本项目已经做出工程机,可根据实际需求进行定制化开发。主要性能参数如下: 1.续航能力:15天(滑翔推进)/8小时(尾鳍推进) 2.最大下潜深度:1000m 3.导航:GPS、惯性导航 4.通信距离:开阔水域可达3km(可选配卫通模块) 5.最大巡游速度:1.5m/s,五级速度可调 6.最大负载能力:25kg 知识产权已申请相关专利。 合作方式技术服务。
巨鱿仿生水下机器人
浙江海洋学院 “巨鱿”水下机器人“Architeuthis Dux” Underwater Vehicle 船舶与海洋工程--智慧海洋研发团队 2012-6-1——2012-8-29
起 点 终点 第一期,挑战竞赛设计 Underwater Vehicle 设计要求 比赛场地: 海洋航行器按申报功能进行5分钟的实航。室内游泳池(长50米,宽21米,深2米,池壁等间距布设8台水下摄像机)。比赛场地上有若干限宽门,门宽1m ,高度为从池底起出水0.5m ,涂装醒目的颜色。比赛中除非航行器沉底,否则不得人工干预比赛。 起点--终点 限宽门布设图→→→ 技术要求,各种设计不做限制。 动力装置:鼓励采用除螺旋桨之外的推进器; 姿态控制:鼓励采用除鳍舵之外的姿态控制方式; 控制方式:鼓励采用除人工遥控控制之外的控制方式; 数据传输:安装数据链路,在地面实时显示航行轨迹。 系统使用频率要求:系统使用频率应符合国家无线电管理委员会的频率分配规定,参赛者应在规定时间上报系统使用频率,一经上报不能改变。现场不能随意开机,届时赛场将备扫频仪和GPS 信号监视设备,违例将被取消参赛资格。 评分要点:根据航行器航行姿态、航线航行、穿越限宽门(或避障碍)、动力方式、航行控制的方式、航行控制的精确性和稳定性、抗过载结构设计等内容评分,设加分项。分值包含航行评分、功能评分,系评分项 加分项 1. 使用新型推进方式 5-10 2. 使用新型导航控制方式 5-10 3. 装载前视或下视或侧视摄像装置,且可实时下传图像供地面显示 3-5 4. 具备下潜持续航行能力 2-5 5. 总体设计新颖 2-5 6. 加工水平 2-5 7. 航海文化创意 1-5 8. 其它功能(每项) 1-2
仿生水下机器人运动控制方法研究
仿生水下机器人运动控制方法研究 o 成 巍 李喜斌 孙俊岭 袁建平 徐玉如 哈尔滨工程大学水下机器人技术实验室 [摘 要] 近年来仿生技术在水下机器人上的应用已经成为水下机器人的重要研究方向之一。仿生水下机器 人采用尾鳍提供前进动力和改变航向,比传统的桨舵具有高效性和高机动性。本文根据仿生水下机器人水池 试验结果讨论了其运动性能,并在此基础上提出了仿生水下机器人运动控制方法,最后通过仿真试验验证了 该方法的可行性。运动控制研究,是仿生水下机器人其它使命的基础,具有重要的意义。 [关键词]水下机器人;仿生推进;智能控制 [Abstract] The application of the bionic technology in the fields of the Underwater Vehicle has been more attractive recently. Compared to the traditional propeller and rudder, the bionic UV inspired by the fish cruises and turns by its caudal fin, which gives more efficiency and more maneuverability. First we discuss the movement capability of the bionic UV according to the results of its water tank tests. Then we give a method of its motion control here. And the feasibility of the method was proved by simulation experiments at last. Motion control is meaningful for the bionic UV to complete other tasks. [Key Words] underwater vehicle, bionic propulsion, intelligent control. 0.引言 近年来,模仿水生动物推进方式的仿鱼尾推进系统应用于水下无人探测器的可行性已经得到了初步的验证。如美国MIT的RoboTuna [1]、美国Draper实验室的VCUUV[2]、日本东京工业大学的机器海豚[3]、哈尔滨工程大学的“仿生-Ⅰ”[4]等,都采用了具有较高巡游速度的金枪鱼或海豚作为模型,研究仿生推进和操纵系统,以期改善传统水下机器人推进和操纵性能,增强水下机器人的运动能力。仿生水下机器人采用尾鳍提供前进的动力和改变航向,与传统的采用桨舵的水下机器人在运动性能和控制方法上都有很大的差别。因此,研究仿生水下机器人的操纵控制方法成为其重要的研究方向之一。本文以“仿生-I”为研究对象,根据其船模试验水池(108×7×4m)试验了解其运动性能,并在此基础上讨论其运动控制方法。 1.“仿生-I”结构 仿生水下机器人“仿生-I”号,以蓝鳍金枪鱼为蓝本,长2.4m,最大直径0.62m,排水量329kg,负载能力70kg,潜深10m,配有月牙形 [作者简介] 成巍(1977–),河北张家口,博士生,研究领域:机器人运动控制与仿真、生物流体力学。
几种水下推进器介绍及超小型水下推进器开发设计
几种水下推进器介绍及超小型水下推进器开发设计
几种水下推进器装置 水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。为了争夺制海权,各国都在开发各种用途的水下机器人。以下介绍几种最新的水下推进器: 1 泵喷推进器 上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海 狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。 图1 “北风之神”级核潜艇尾部泵喷射推进器特写 采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。
图2 泵喷推进器设计三维图 随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。 2 WT系列蛙人助推器 武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。水下推进器系列采用先进可靠的驱动方式,力图给使用者提供最强劲持久的推进力。该产品广泛应用于水下蛙人推进、水底拍摄、潜水娱乐及辅助水下救生等。 图3 WT1-50系列水下推进器 WT1-50系列水下推进器体积小、重量轻,采用蓄电池作动力,设有电池容量显示,充电方便。在水中呈零浮力状态。采用特殊的密封结构。使用维护简单、安全、可靠。最大潜水深度为50米,可以给您的水中航行带来前所未有的体验。其主要技术参数见表1。 适用场合:单人水下蛙人推进、水底拍摄、潜水娱乐
水下推进器安全操作规程
编号:CZ-GC-00890 ( 操作规程) 单位:_____________________ 审批:_____________________ 日期:_____________________ WORD文档/ A4打印/ 可编辑 水下推进器安全操作规程 Safety operation rules for underwater thruster
水下推进器安全操作规程 操作备注:安全操作规程是要求员工在日常工作中必须遵照执行的一种保证安全的规定程序。忽视操作规程 在生产工作中的重要作用,就有可能导致出现各类安全事故,给公司和员工带来经济损失和人身伤害,严重 的会危及生命安全,造成终身无法弥补遗憾。 1、水下推进器启动前检查电机定子绕阻对地绝缘电阻,最低不得低于50兆欧,检查接地是否牢固、电缆绑扎是否合理及叶轮旋转方向。 2、在确认可以启动后,手动状态下现场人员直接按绿色〖启动〗按钮启动,自动状态下通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。
7、在接到生产部关闭指令后,手动状态下按红色〖停止〗按钮关闭,自动状态下由中控室点击关闭按钮关闭水下推进器。 8、保持水下推进器平台情节卫生,并按要求填写水下推进器运行记录。 这里填写您的公司名字 Fill In Your Business Name Here
几种水下推进器介绍及超小型水下推进器开发设计
水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。为了争夺制海权,各国都在开发各种用途的水下机器人。以下介绍几种最新的水下推进器: 1?泵喷推进器 上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。 图1 ?“北风之神”级核潜艇尾部泵喷射推进器特写 采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。 图2? 泵喷推进器设计三维图
随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。 2 WT系列蛙人助推器 武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。水下推进器系列采用先进可靠的驱动方式,力图给使用者提供最强劲持久的推进力。该产品广泛应用于水下蛙人推进、水底拍摄、潜水娱乐及辅助水下救生等。 图3? WT1-50系列水下推进器 WT1-50系列水下推进器体积小、重量轻,采用蓄电池作动力,设有电池容量显示,充电方便。在水中呈零浮力状态。采用特殊的密封结构。使用维护简单、安全、可靠。最大潜水深度为50米,可以给您的水中航行带来前所未有的体验。其主要技术参数见表1。 适用场合:单人水下蛙人推进、水底拍摄、潜水娱乐 表1 WT1-50系列主要技术参数表 型号 尺寸重蓄电电动机 速最潜水备
水下机器人研究现状与探索
水下机器人研究现状与 探索 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
《大学计算机基础》 课程报告 论文名称:水下机器人研究现状与探索二零一七年一月 目录
水下机器人研究现状与探索 朱钰璇 摘要:本文总结了水下机器人的研究历史,现状与目前的发展趋势,具体分析了现代水下机器人应用的技术,指出他们的优缺点,并且针对未来的深海探索机器人的材料,结构,移动方式,动力来源,仿造乌贼等海洋软体动物提出设想,实际应用前景广阔。随着科学技术的发展,水下仿生机器人在智能材料制成的驱动装置、游动机理方面会不断地完善,在个体的智能化和群体的协作方面也会有很大的发展。 关键词:水下机器人;深海探索;仿生; PRESENTSTATEANDFUTUREDEVELOPMENTOFUNMANNEDUNDERW ATERVEHICLETECHNOLOGYRESEARCH ZHUYuxuan Abstract:Inthispaper,thehistory,;theexplorationofdeepsea;Bionic 1引言(Introduction) 世界海洋机器人(unmannedmarinevehicles,UMV)发展的历史大约60年,经历了从载人到无人,从遥控到自主的主要阶段。加拿大国际潜水器工程公司(ISE)总裁麦克·法兰将海洋机器人的发展历史分为4个阶段[1],并将前3个阶段
称为革命(revolution):第一次革命在20世纪60年代,以3人潜水器为标志;第二次革命为70年代,以遥控水下机器人的迅速发展为特征;第三次革命大体为80年代,以自主水下机器人的发展和水面机器人(USV)的出现为标志。现在则是混合型海洋机器人的时代。 水下机器人(Unmannedunderwatervehicle,UUV)是一种可在水下移动、具有感知系统、通过遥控或自主操作方式、使用机械手或其他工具代替或辅助人去完成水下作业任务的机电一体化智能装置。水下机器人是人类认识海洋、开发海洋不可缺少的工具之一,亦是建设海洋强国、扞卫国家安全和实现可持续发展所必需的一种高技术手段。 水下机器人的移动方式十分多样。螺旋桨推进的水下机器人存在流体推进效率低、动作不灵活、噪音大、桨叶会伤害海洋动物等问题。针对这些问题,游动水下仿生机器人如机器鱼应运而生,但它们耐压能力较低。软体动物乌贼凭借喷射和鳍波动的高效、灵活的复合游动方式,成功地与鱼类竞技海洋;它们依靠肌肉性静水骨骼,活跃于从上千米的深海至海平面的广阔海域。[2]就当前水下仿生机器人的发展水平来看,现有水下仿生机器人的功能特性仍然与被模仿的生物存在很大差距。生物体本身结构复杂,其运动规律又难以观测,学科交叉方面也存在问题。这都限制了仿机器人的发展。在未来的发展中,应利用多学科优势并从生物性能出发,使得水下仿生机器人向着结构与生物材料一体化的类生命系统发展,才能在生产生活中发挥更为重要的作用。[3]
水下推进器安全操作规程(正式)
水下推进器安全操作规程(正 式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 1、水下推进器启动前检查电机定子绕阻对 地绝缘电阻,最低不得低于50兆欧,检查接地 是否牢固、电缆绑扎是否合理及叶轮旋转方 向。 2、在确认可以启动后,手动状态下现场人 员直接按绿色〖启动〗按钮启动,自动状态下 通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视
一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。 7、在接到生产部关闭指令后,手动状态下按红色〖停止〗按钮关闭,自动状态下由中控室点击关闭按钮关闭水下推进器。 8、保持水下推进器平台情节卫生,并按要求填写水下推进器运行记录。
请在这里输入公司或组织的名字Please enter the name of the company or organization here
水下机器人研究现状与探索
《大学计算机基础》 课程报告 论文名称:水下机器人研究现状与探索二零一七年一月 目录 摘要 (2) 关键词 (2) 1 引言( Introduction) (3) 2水下机器人分类( The categories of underwater robot ) (4) 2.1遥控式水下机器人(remotely operated vehicles, ROV) (4) 2.2自主水下机器人(Autonomous underwater vehicles, AUV) (5) 2.3新概念水下机器人 (6) 3水下仿生机器人(bionic underwater robot) (7) 3.1水下仿生机器人主要研究和发展趋势( The (7) main research and development trends of (7) bionic underwater robot) (7) 3.2 水下仿生机器人的问题(The Problems of bionic underwater robot) (8) 3.3 驱动以及推进方式 (9) 4 仿生创新思路 (11) 4.1以乌贼为代表的海洋动物结构及运动方式 (11) 4.2 复合式水下仿生机器人 (12) 4.3 群体水下仿生机器人 (13) 5 结论 (13) 参考文献: (14)
水下机器人研究现状与探索 朱钰璇 摘要:本文总结了水下机器人的研究历史,现状与目前的发展趋势,具体分析了现代水下机器人应用的技术,指出他们的优缺点,并且针对未来的深海探索机器人的材料,结构,移动方式,动力来源,仿造乌贼等海洋软体动物提出设想,实际应用前景广阔。随着科学技术的发展, 水下仿生机器人在智能材料制成的驱动装置、游动机理方面会不断地完善, 在个体的智能化和群体的协作方面也会有很大的发展。 关键词:水下机器人;深海探索;仿生; PRESENT STATE AND FUTURE DEVELOPMENT OF UNMANNED UNDERWATER VEHICLE TECHNOLOGY RESEARCH ZHU Yuxuan Abstract: In this paper, the history, present situation and future of Unmanned underwater vehicle technology are summarized. We also further describe the mobile robot technologies concerning Unmanned underwater vehicle . In addition, point out
水下推进器在转子结构特点
水下推进器在转子结构特点 本世纪六十年代起,能源的利用已引起工程界的广泛重视。另外,由于科学业技术的发展,水下推进器使用旋转机械技术的可靠性也大有提高。这样就引起了某些工业生产流程中动力机械的重大改革,其中较好主要的是化工流程中的电动机-活塞压气机被工业水下推进器离心压缩机所代替。 现代的水下推进器中使用离心压缩机,由于材料、制造工艺、振动强度计算、轴承润滑技术和特别是高速动平衡技术的发展,工作转速较好高的已达到25000r/min左右,一般的也达到10000-15000r/min。 对于高速水下推进器转子,为了提高安全可靠性,总是设计成整锻式的,也就是叶轮与轴是整体的。冲动式汽轮机的整锻转子,叶轮还是存在,只是水下推进器与轴是一体的。 水下推进器使用过程中不论冲动式或者反动式汽轮机转子,其主要零部件转子轴本体外,尚有叶片和联轴器,一有危急保安器等。其中叶片数量甚多,例如反动式汽轮机转子的叶片,较好多可达3000只左右。 水下推进器在离心压缩机转子的结构,相对于工业汽轮机转子有较大推进差别。由于水下推进器中的离心压缩机的叶轮结构比较复杂,与轴整体加工十分困难,所以至今离心压缩机转子始终是装配式的,但是叶轮的轮体与轮盖的接合已由接改为焊接。水下推进器中的离心压缩机是从叶轮中部进气的,这样转轴的直径就受到进气口的限制,所以离心压缩机转子一来都是柔度较大。 实践表明,不论工业水下推进器转子,或是水下推进器离心压缩机转子,它们运行平衡性与转子的动平衡品质有密切关系。所以近代在汽轮机与压缩机转子的商品验收中,都把转子运平衡品质列入主要验收项目之中。相应地,国也不少转动平衡品质评定标准,如较好早出现的西德VDI2060和日本JISB0905标准等。 国际标准化组织也不少有关标准,如ISO1925,ISO1940,ISO5406和ISO5343。另外,国际商业上在水下推进器通用的工业汽轮机标准API611与API612以及离心压缩机标准API617中也都有转子动平衡品质的验收条款。正因为如此,近年来动平衡技术也大大地发展了,成为转子动力学中重要的学科。
仿生鱼机器人设计说明书
仿生鱼机器人设计说明书
目录 第一章绪论…………………………………………………………………………………………………目的及意义…………………………………………………………………………………………… 研究现状………………………………………………….…………………………………………… 本文的主要工作…………………………………………………………………………………… 第二章概述………………………………………………………………………………………………… 整体构思…………………………………………………………………………………………..… 仿生依据……………………………………………………………………………………………… 第三章机械结构设计……………………………………………………………………………………机械设计思路及建模…………………………………………………………………………… 创新点…………………………………………………………………………………………………… 零件明细……………………………………………………………………………………………… 第四章仿真分析…………………………………………………………………………………………第五章电路设计…………………………………………………………………………………………第六章控制系统…………………………………………………………………………………………第七章总结…………………………………………………………………………………………………优势及创新点……………………………………………………………………………………… 主要关键技术……………………………………………………………………………………… 应用前景与趋势………………………………………………………………………………… 不足与改进…………………………………………………………………………………….……
水下仿生机器人研究综述
·24· NO.20 2018 ( Cumulativety NO.32 ) 中国高新科技 China High-tech 2018年第20期(总第32期) 1 引言 目前,随着社会的发展,工业和生活中对智能化和精细化的要求越来越高,机器人研究和设计成为研究热点。机器人的应用可以优化日常生活,满足人们日益增长的物质需求,同时在工业生产中也可以完成一些复杂和危险的任务,如机械装配、野外探险等。 近年来,海洋的战略地位越来越重要,水下机器人获得了极大的发展。海洋环境复杂多变,如何设计结构简单灵巧且适应性强的水下机器人成为机器人研究中的重点。科学家通过将仿生学和机器人两大学科相结合,提出了新的想法:水下仿生机器人。水下仿生机器人根据海洋生物的外形结构和运动方式进行设计。由于海洋生物经过了亿万年的进化演绎,其生物体模型对海洋环境的适应性强,所以水下仿生机器人将会更容易完成指定的工作,从而使人们在不破坏海洋生态系统的前提下更好地了解海洋、运用海洋。本文主要针对水下仿生机器人的发展现状进行综述。 2 机械结构设计 美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。研究人员在1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。紧接着,英国塞克斯大学(Essex)就以鱼类结构 为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线运动和转向的问题。而美国海洋学中心则是把对生物模仿进行得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”。该“机器龙虾”按照龙虾的每个身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。 目前,我国的一些研究机构也开始了针对水下仿生机器人的研究和探索。北京航天航空大学作为最早开始研究此领域的机构,已研制出可在水下连续工作2~3小时的仿生机器鱼。此后,国防科技大学、哈尔滨工程大学、中科院自动化研究所等也开展了不同程度的研究。 3 材料应用 水下环境复杂,因此对水下仿生机器人的材料要求十分严格。目前运用较为广泛的有如下几种材料: (1)高分子聚合物-金属复合材料。其重要特点是结合了高分子聚合物和金属材料的优点。高分子聚合物在大部分环境下都能承受一定程度上的变形,对外部环境的影响能够做出良好的调整,同时质量较轻,而金属材料则硬度较大。采用该复合材料能使机器人更加适应水下环境。 (2)镁合金材料。作为一种价格适中的材料,其主要特点是质量轻,非常适合用做机器人的外部轮廓,同时该材料硬度大,不易损坏。 (3)介电弹性材料。该材料在机器人驱动器上应用很广泛。作为一种柔软度较好的材料,其突 水下仿生机器人研究综述 蒲欣岩 (成都七中高新校区,四川 成都 610041) 摘要:随着海洋探索技术的不断发展,水下仿生机器人日益引起关注。针对水下仿生机器人的研究现状,文章从机械结构设计、材料应用和控制方法3个方面进行综述,并基于对水下仿生机器人的深入了解,对其未来的发展趋势进行分析。 关键词:水下仿生机器人;机械结构;控制方法 文献标识码:A 中图分类号:TP242文章编号:2096-4137(2018)20-024-02 DOI:10.13535/https://www.360docs.net/doc/a03060659.html,ki.10-1507/n.2018.20.08 收稿日期:2018-07-12 作者简介:蒲欣岩(2000-),女,四川成都人,成都七中高新校区学生,研究方向:自动化控制、机器人。
水下机器人的发展现状
水下机器人的发展现状 摘要:介绍了国内外典型水下机器人的性能特点,阐述了国内外水下机器人发展的历史及现状,总结了水下机器人发展中存在的一些关键问题,并对未来水下机器人领域的发展动向作出了展望. 0引言 机器人技术是集运动学与动力学理论、机械设计与制造技术、计算机硬件与软件技术、控制理论、电动伺服随动技术、传感器技术、人工智能理论等科学技术为一体的综合技术.它的研究与开发标志着一个国家科学技术的发展水平,而其在各种机械领域的普及应用,则显示了这个国家的经济和科技发展的实力.世界上许多国家为了推进本国的机器人开发事业,打入竞争日益激烈的国际高科技市场,不惜投入巨大的人力、财力来推动机器人技术的发展,开发出了许多类型的机器人.机器人的应用领域也逐渐从人工环境扩展到了水下和宇宙.随着人口数量的增长和科学技术水平的不断提高,人类已把海洋作为生存和发展的新领域,海洋的开发与利用已经成为决定一个国家兴衰的基本因素之一.从而使水下机器人具有更加广阔的应用前景.水下机器人设计是一项综合性的复杂工程,技术密集度高,是公认的高科技,它的研制水平体现了一个国家的综合技术力量. 水下机器人一般可以分为两大类:一类是有缆水下机器人,
习惯称为遥控潜水器(RemoteOperatedVehicle,简称ROV);另一类是无缆水下机器人,习惯称为自治潜水器(AutonomousUnderwaterVehicle,简称AUV).此外,按使用的目的分,有水下调查机器人(观测、测量、试验材料的收集等)和水下作业机器人(水下焊接、拧管子、水下建筑、水下切割等作业);按活动场所分,有海底机器人和水中机器人. 水下机器人在20世纪50年代初诞生时,由于所涉及的新技术还不够成熟,电子设备的故障率高,通信的匹配以及起吊回收等问题没有很好解决,因此发展不快,没有受到人们的重视.到了60年代,国际上开始两大开发技术,即宇宙和海洋开发,促使远距离操纵型机器人得到了很快的发展,到了80年代,由于海洋开发与军事上的需要,尤其是水下机器人本体所需的各种材料及技术已得到了较好的解决,水下机器人才得到了很大发展,开发出了一批能工作在各种不同深度,进行多种作业的机器人,可用于石油开采、海底矿藏调查、救捞作业、管道敷设和检查、电缆敷设和检查、海上养殖、江河水库的大坝检查及军事等领域.目前,水下机器人大部分是框架式和类似于潜艇的回转细长体,随着仿生科技技术的不断发展,仿生鱼形态甚至是运动方式的水下机器人将会不断发展。水下机器人工作在充满未知和挑战的海洋环境中,风、浪、流、深水压等各种复杂的海洋环境对机器人的运动和控制干扰严重,使得水下机器人的通信和导航定位十分困难,这是与陆地机器人最大的