透镜中心厚度检测 (3)
透镜中心厚度的在线非接触测量系统
摘要:透镜中心厚度检测是透镜生产中的一个重要环节,传统的方法是采用接触式测量法,这种检测法精度低、耗时长、容易划伤透镜并且无法实现实时在线测量。本文设计了一种基于激光三角法测距原理的透镜中心厚度检测系统,该系统是一种新型的非接触测量系统,测量精度高,并且实现了生产线上的实时测量。论文首先介绍了激光三角法测距的基本原理,其次介绍了透镜中心厚度检测系统的结构组成,系统采用精密的四维调整台和改进的激光三角探头对透镜中心进行精确定位,定位精度可以达到亚微米级,系统用两个性能指标完全一样的激光三角探头进行测量,达到了较好的测量效果,测量范围为0.5~20mm。最后,论文通过对系统的误差来源进行分析,得出了系统的测量精度,透镜中心厚度检测系统的测量精度≤5 m。关键词:非接触测量,激光三角法,透镜中心厚度检测
Abstract:Lens center thickness detection is an important part in the production of lens, the traditional method is the contact measurement which has a low accuracy, time-consuming, easy to scratch the lens and can not achive real-time and on-line measurement.Based on the principle of laser triangulation rangefinder we designed a lens center thickness detection system in the paper, which is a new non-contact measurement system with high accuracy and a real-time measurement on the lens production. First, the paper introduces the basic principle of the laser triangulation ranging. Second, the paper describes the structure of the lens center thickness detection system, which uses the precision four-dimensional adjustment platform and the improved laser triangulation probes to achieve precision positioning of the lens centre, therefore the positioning accuracy can be reached sub-micron. The system uses two laser triangulation probes with the entirely same technical indicators to measure and achieves a better measurement result. The measurement range reaches 0.5~20mm. Finally, the paper analysis the source of the error, the precision of the lens center thickness detection system reaches≤5mm.
Key words: Non-contact measurement, Laser triangulation, Thickness of lens center testing
引言
透镜是光学系统中最基本的元件,现代光学仪器要求具有非常高的成像质量,这就对透镜的加工质量提出了很高的要求,加工出来的透镜必须严格限制在公差范围内。在透镜的生产过程中,透镜中心厚度是一个很重要的参数,它对透镜的焦距和曲率半径都有影响,关系着成像质量的好坏,因此需要在生产线上实现对透镜中心厚度的自动、实时检测,这对于提高生产效率,减小测量误差,保障透镜质量具有重要意义。传统的透镜中心厚度检测方法是采用接触式测量或者是利用干涉法测量,采用接触式测量需要将检测头与透镜相接触,这很容易对透镜造成划伤,而且接触式测量很难准确找到透镜的中心位置,因此测量的精度也比较低;而干涉法测量虽然能达到较高的测量精度,但是容易受到周围空气的扰动,测量的稳定较差[1]。
本文设计了一种基于激光三角法的透镜中心厚度检测系统,系统采用两个高精度的激光三角位移传感器和PZT驱动的精密四维调整台,可以快速准确的对透镜中心进行定位,而且也保证了测量具有很高的精度,该系统属于非接触式测量,与传统的透镜中心厚度检测方法相比较具有测量精度高、测量速度快、实时在线测量的优点[2],并且不会对透镜表面造成划伤。
1.激光三角法测量原理
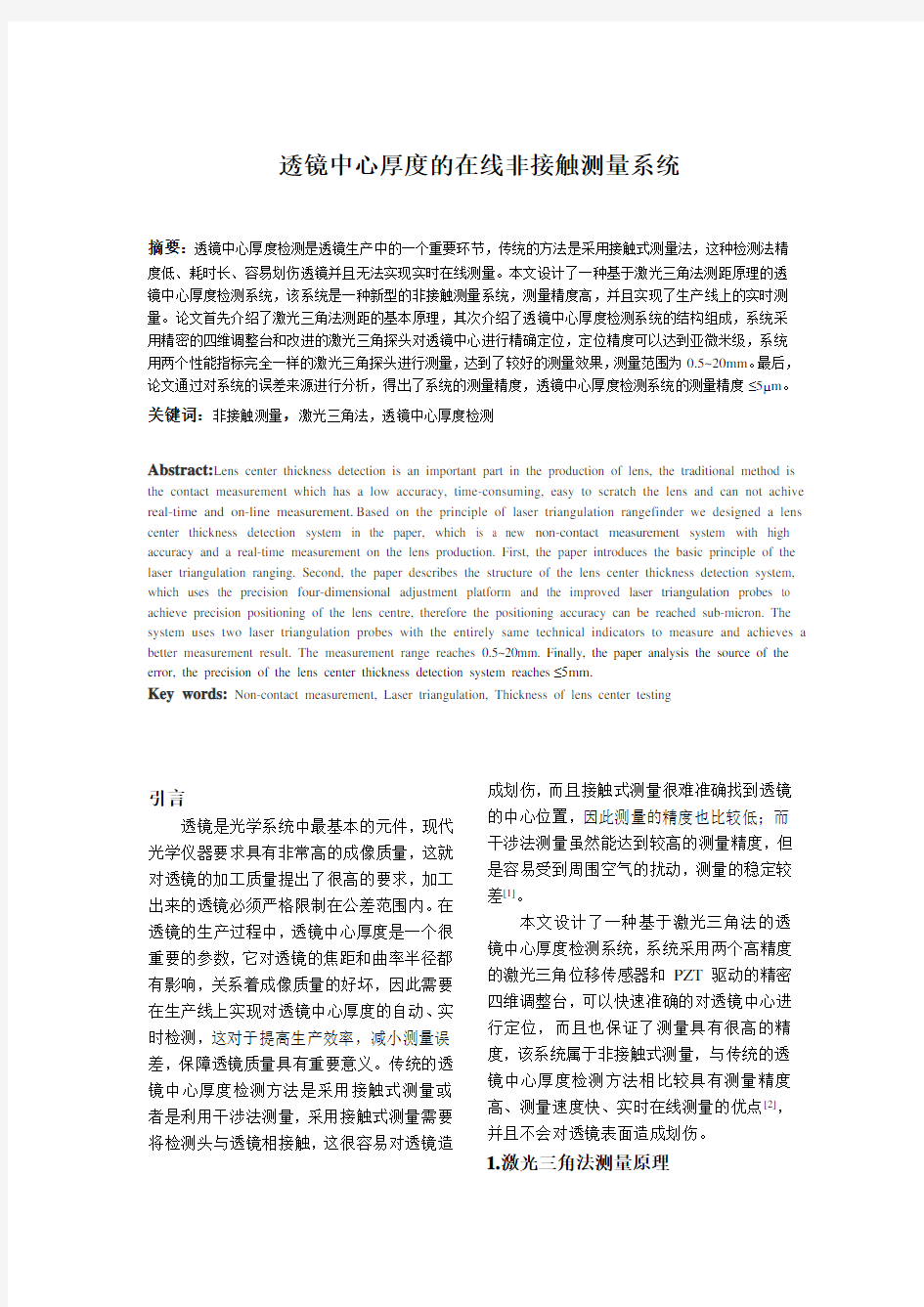
激光三角法是一种非接触式测量方法,利用光电探测器将物体位移量的光学信号转变为电信号,经过后续电路处理后,将物体的位移以数字形式输出,基本原理如图1所示,激光器发出的激光束经准直聚焦光学系统后入射到被测物体表面上,经该点漫反射的光通过成像光学系统后成像在光电探测器的光敏面上,当被测物体沿着光入射方向移动,或者表面发生变化时,入射光斑相对于原来位置产生变化,其相应的像点经过成像光学系统后在光电探测器光敏面上的位置也会发生变化,只要通过测量光电探测器光敏面上像点的位移 就可以计算出被测物体的位移量 H。因为入射激光与反射激光形成一个三角形,因此这种测量方法被称为激光三角法。激光三角法按入射光线与被测表面法线的关系分为直射式激光三角法和斜射式激光三角法两种结构。本文中选用的是直射式激光三角法,为了提高测量的精度,在本系统中选择激光二极管(LD)作为激光三角位移传感器的发射光源,线阵CCD作为光电探测器。
图1.激光三角法测距原理图
在直射式激光三角测距结构中,入射光束垂直于被测表面,只有一个准确的调焦位置,而其余位置的像都处于不同程度的离焦状态,从而引起像点的弥散[3],使系统的测量不完全,产生较大的误差。为了提高系统的测量精度,使光点所成的像在光电探测器线阵CCD接收面上每一点都能清晰成像,光路的布局需要满足“Scheimpflug”条件[4],即入射光轴、成像物镜主平面和线阵CCD 三者延长线相交于一点,如图1中P点。其中l0和l1分别为物距和像距,物体的实际位移量?H,像点在线阵CCD光敏面上的位移为δ,入射光与成像透镜光轴的夹角为θ,线阵CCD与成像透镜光轴的夹角为φ。假设入射激光照射到被测物表面上的光斑正好落在成像物镜的光轴上,选该点作为测量的基准点,即图中的O点。按照几何光学近轴成像公式以及相似三角形边角关系,可以推导出物点位移与像点位移之间的关系为:
()?
θ
δ
θ
?
δ
?
+
=
sin
sin
sin
1
l
l
H(1)(被测面从基准点向上移动取“-”,向下移动取“+”)当物体的位移较小时,()θ
φ
θ
δsin
sin1l
<<
+,所以上式可以近似为:
δ
θ
?
δ
??
=
=K
l
l
H
sin
sin
1
0(2)
θ
?
sin
sin
1
l
l
K=,是一个常数,可以看出当物体发生微小位移时,δ-?H近似成线性关系。但是在实际测量过程中,物点位移和像点位移之间的关系是由式(1)决定的。
在直射式激光三角法中需要满足的“Scheimpflug”条件为:
φ
β
θtan
tan=(3)这里的β是激光三角位移传感器中成像光学系统的横向放大倍率。对于设计好的激光三角位移传感器,其l0、l1、θ、φ都是已经确定的值,因此只要知道像点的位移δ,就可以计算出被测物体的位移量。由于激光三角法测量具有测量精度高,非接触测量的优点,该测量方法已经广泛应用于现代工业精密测量领域中[5]。
2.基于激光三角法测量透镜中心厚度的方法
2.1系统总体结构
透镜中心厚度测量系统是基于激光三角法测距原理的非接触式、实时在线测量系统,系统总体框架如图2所示。
图2.透镜中心厚度检测系统框架图
系统主要是由带有吸盘的机械手臂、PZT驱动的精密四维调整台、高精度的激光三角位移传感器、测量平台及计算机组成,如图3所示。计算机控制的机械手臂1将被测透镜送到检测平台上,并通过PZT驱动的精密四维调整台和具有自准直功能的激光三角位移传感器来对透镜中心定位,带有自准直功能的激光三角位移传感器会将透镜中心的定位情况反馈给计算机,直到准确的找到透镜的中心位置。在确定了被测透镜的中心后,两个激光三角位移传感器开始对透镜进行精密测量,并将测量结果输入到计算机,计算机经过后续处理以数字形式输出透镜的中心厚度,完成透镜中心厚度的检测。如果透镜中心厚度在允许的公差范围内,透镜将会被送往下一生产线上;如果透镜的中心厚度超出了公差允许的范围,就意味着被检测的透镜不合格,计算机将会报警并控制机械手臂2将质量不合格的透镜拣出,这样系统实现了高度的自动化和集成化,可以广泛应用于透镜生产线上,具有很高的应用价值。
激光三角
图3透镜中心厚度检测系统结构示意图2.2系统工作过程
如图4所示,系统工作时,首先将两个激光三角位移传感器分别夹持在检测平台上下两端,然后在检测平台上放置一个平行平板,激光三角探头1发出的激光入射到平行平板上,调整该平板的位置,使光束垂直入射到平行平板上并且经平行平板反射的光通过分光镜后在CCD1中心成像,利用相同的原理再对另一个激光三角探头2进行定位,此时保持平行平板不动,调整激光三角探头2 的位置,使探头2发出的入射激光垂直入射到平行平板,并且反射光经过分光镜后在CCD2中心成像,这样上下两个探头发出的两路光分别在两个CCD中心成像,从而实现系统的自准直。
在对被测件测量之前,先要对系统进行标定,选择一个标准量块来进行标定。测量前将标准量块放入检测平台,量块上下表面的散射光分别在激光三角位移传感器的光电接收器线阵CCD上成像,将其成像位置标定为零位置,当换上被测件后由于光程改变,所以散射光斑经成像透镜后在线阵CCD 上的像点位置也发生改变,按照激光三角测距原理可知:
()?
θ
δ
θ
?
δ
?
+
-
=
sin
sin
sin
1
1
1
1l
l(4)
同样可以测得?2的长度,若标准件的厚度为D,那么被测透镜中心厚度L为:
()
2
1
?
+
?
±
=D
L(5)
Laser1
Laser2
图4.透镜中心厚度测量系统图
2.3激光三角位移传感器的设计
在透镜中心厚度检测系统中使用两个具有自准直功能的激光三角位移传感器来对透镜中心定位并对透镜中心厚度进行测量,因此激光三角位移传感器是本套系统中的核心部件,系统采用的是直射式结构的激光三角位移传感器,其结构如图5所示。
图5.激光三角位移传感器结构 1.LD 光源 2.分光镜 3.准直系统 4.成像系统 5.线阵CCD
其中光源选择的是半导体激光二极管(LD ),波长650nm ,输出功率7mW 。线阵CCD 采用的是TCD1708D ,像元数为7450,像元大小为4.7μm×4.7μm×4.7μm (相邻像元中心距为 4.7μm ),像元总长35.015mm ,光谱响应峰值波长为550nm 。准直系统采用的是柱透镜与单透镜组合的方法对入射激光束准直、聚焦,在被测物体表面形成的光斑约为25μm 。成像系统选用的是双远心光学系统[6],
光路图如图6所示。图7是双远心光学系统的MTF 曲线。
图6.成像光学系统光路图
双远心光路是物方远心光路的像方焦点与像方远心光路的物方焦点相重合[7]。当平行光进入物方远心光路后,出射光仍为平行光,所以双远心光路本质上是无焦系统。双远心光路在非接触测量中具有重要的应用价值:当物距或像距发生微小移动时,各点的主光线不发生变化,从而在CCD 上接
收到的像长不变,从而避免了由于调焦误差或者对准误差引起测量误差[8],提高了系统的测量精度。双远心光学系统与单远心光学系统相比,其优势为视场内各点的视场角和放大率恒定,从而提高了采集图像的精度,更加减少了因物体或CCD 沿光轴的横向移动引起的测量误差。故双远心光学系统具有物方远心光路和像方远心光路两种光路的
优势,可以应用于非接触的在线实时测量系统。同时,采用双远心光路系统,可以省去
复杂的实时自动调焦机构,既节约了硬件成本,同时也减少了软件处理工作的复杂性,为后续设计减轻了负担。
图7.成像系统MTF 曲线 2.4透镜中心的确定方法
系统能够自动地对透镜中心进行快速准确的定位,末端装有吸盘的机械手臂将待测透镜抓取到检测平台上,系统采用精密的四维调整台来定位透镜的中心,四维调整台采用PZT 驱动,该驱动反应时间快,定位精准,运动精度可达到亚微米级。机械手臂将被测透镜放入调整台时,先利用冲击气流对被测透镜中心进行初步定位,然后观察入射光通过被测透镜后在CCD 上的成像位置,判断被测透镜是否调平,当被测透镜中心法线与入射激光存在一定夹角或位移时,光斑不能在CCD 中心成像,如图8所示,此时向反方向调整平移台,从而调整光斑成像的位置,经过计算机计算,反馈给调整台,直到光斑位于CCD 中心,此时系统已经精确的找到了透镜的中心,并开始测量。这种利用光电对准的方法避免了人眼睛的主观误差,提高了系统对透镜定心的精度,而且
也提高了测量效率,减轻了测试人员的劳动强度。在确定了被测透镜的中心位置后,计算机控制透镜上下两端的两个激光三角位移传感器分别对透镜进行测量,并将测量结果输入计算机,最后经过软件处理输出透镜中心厚度的测量结果。
CCD
倾斜时
图8.确定透镜定位示意图
3.系统误差估算
系统采用标准件(成都威博恩光电有限公司生产的标准平晶)的测量方法,其自身原理误差不超过0.03μm ,激光三角探头工作距离引起的误差约为 1.1μm ,线阵CCD 引起的误差非常小可以忽略,成像透镜所引起的误差大约为2.5μm ,其它机械装调所引起的误差不超过1μm 。由于系统采用的是两个激光三角探头,因此除了系统原理误差外,其余误差对测量结果造成的影响都是两次的,因此系统总的误差大约为:
4.23m
δμ==对于成像质量要求较高的光学系统,其透镜中心厚度公差要求一般在5μm 之内,因此,该测量系统的测量精度足以满足生产要求。
4.结论
本文所研究的基于激光三角法的透镜中心厚度检测系统主要是由激光三角位移传感器、机械手臂、精密四维调整台、计算机等系统组成,具有测量精度高,定心准确的优点,该测量系统由于采用了非接触式测量方法,因此测量精度相对于以往的接触式测量有了很大的提高,同时避免了测量时对透镜造成表面划伤。系统测量范围达到0.5~20mm ,测量精度≤5μm 。该系统在透镜
生产加工线上具有很高的应用价值。
参考文献
[1] 高明,黄钉劲,刘钧.透镜中心厚度测量仪的设
计. 西安工业学院学报,2003,23(3):235~236 [2] 赵丁选. 光机电一体化设计使用手册. 北京:化
学工业出版社 2003
[3] 张以谟. 应用光学. 北京:电子工业出版社
2008
[4] 王晓嘉,高隽,王磊. 激光三角法综述. 仪器仪
表学报,2004,25(4):601~604
[5] 邹振书,李喜增,张景和,高清峰. 非接触测
量激光光学探头.光学精密工程,1997,5(3):83~89
[6] 孙学珠,付维乔,刘庆,王庆有.高精度CCD
尺寸自动检测系统的光学系统设计.光学技术,1995,(5):4~6
[7] 王向军,王凤华,周鑫玲.物像远心成像光路在
高精度视觉检测中的应用.测试技术学报,1998,12(3):149~154
[8] 赵念念,邱宗明.远心光路对准误差的分析及光
学调整方法.陕西机械学院学报.1991,7(4):213~216
共轭法凸透镜焦距的测量
物理实验报告 实验名称:共轭法凸透镜焦距的测量 学院、系:信工学院电信系 年级、班:2011级电信(2)班 学生姓名:金秋含、李婷、王茹 指导教师:刘浩 2012年6月25日
报告摘要 透镜是光学仪器中最基本的元件,反映透镜特性的一个主要参量是焦距,它决定了透镜成像的位置和性质(大小、虚实、倒立)。对于薄透镜焦距测量的准确度,主要取决于透镜光心及焦点(像点)定位的准确度。本实验在光具座上采用共轭法测量了3种凸透镜的焦距,以便了解透镜成像的规律,掌握光路调节技术,比较各种测量方法的优缺点,为今后正确使用光学仪器打下良好的基础。 关键词 左右逼近法,同轴等高,共轭法,自准法,物距像距法,误差分析。 一. 实验目的 1.了解凸透镜的成像规律; 2.掌握光学系统的共轴调节; 3.熟悉光学实验的操作规则; 4.测定凸透镜的焦距; 5.进一步熟悉数据记录和处理方法。 二. 实验仪器 光具座: 光具座所配之光源有半导体激光器与射灯光源。 凸透镜:根据光的折射原理制成的。凸透镜是中央较厚,边缘较薄的透镜。凸透镜有会聚作用故又称聚光透镜,较厚的凸透镜则有望远、会聚等作用,这与透镜的厚度有关。 平面反射镜 光源: 像屏: 观察屏: 三. 实验原理 1. 薄透镜成像公式 当透镜的厚度远比其焦距小的多时,这种透镜称为薄透镜。在近轴光线的条件下,薄透镜成像的规律可表示为:
自准法测薄透镜焦距光路图 f v u 1 11=+ 式中U 表示物距,V 表示像距,f 为透镜的焦距,U 、V 和f 均从透镜的光心O 点算起。并且规定U 恒取正值;当物和像在透镜异侧时,V 为正值;在透镜同侧时,V 为负值。对凸透镜f 为正值,对凹透镜f 为负值。 2. 凸透镜焦距的测定 (1)自准法 如图所示,将物AB 放在凸透镜的前焦面上,这时物上任一点发出的光束经透镜后成为平行光,由平面镜反射后再经透镜会聚于透镜的前焦平面上,得到一个大小与原物相同的倒立实像A ′B ′。此时,物屏到透镜之间的距离就等于透镜的焦距f 。 (2)物距像距法(U>f ) 物体发出的光线经凸透镜会聚后,将在另一侧成一实像,只要在光具座上分别测出物体、透镜及像的位置,就可得到物距和像距,把物距和像距代入下式得: v u uv f += 由上式可算出透镜的焦距f 。(根据不确定度传递公式可知,当U=V =2f 时,f 的相对不确定度最小)。 (3)共轭法 如图所示,固定物与像屏的间距为D(D>4f),当凸透镜在物与像屏之间移动时,像屏上可以成一个大像和一个小像,这就是物像共轭。根据透镜成像公式得知: U 1=V 2; U 2=V 1 (因为透镜的焦距一定)若透镜在两次成像时的位移为d , 则从图中可以看出1212u v u d D =+=- 故 2d D u -= ;
超声法皮下脂肪厚度测量系统的研究
目录 第一章绪论.........................................................................................................................- 1 - 1.1 论文背景和研究意义 .....................................................................................................- 1 - 1.2 人体脂肪含量检测研究状况.........................................................................................- 2 - 1.3 本文的主要研究工作 .....................................................................................................- 4 - 第二章超声法测量皮下脂肪厚度的基本原理...............................................................- 7 - 2.1 人体浅表软组织生物学特性.........................................................................................- 7 - 2.2 超声波在浅表组织中的传播特性 ................................................................................- 9 - 2.3 超声法测量厚度基本方法分析 ..................................................................................- 10 - 2.4 脉冲回波法测量皮下脂肪厚度的基本原理..............................................................- 13 - 2.5 本章小结........................................................................................................................- 14 - 第三章超声测量系统硬件设计与实现.........................................................................- 15 - 3.1 系统硬件总体方案 .......................................................................................................- 15 - 3.2 超声脉冲发射模块设计...............................................................................................- 16 - 3.2.1 方波发生电路 .....................................................................................................- 16 - 3.2.2 直流升压电路 .....................................................................................................- 17 - 3.2.3 负高压电脉冲触发电路.....................................................................................- 19 - 3.3 回波信号预处理模块设计...........................................................................................- 19 - 3.3.1 回波信号放大与滤波.........................................................................................- 19 - 3.3.2 中周选频滤波 .....................................................................................................- 20 - 3.3.3 信号的差分放大与整流.....................................................................................- 21 - 3.4 回波处理控制显示模块设计.......................................................................................- 21 - 3.4.1 非门晶振振荡电路.............................................................................................- 21 - 3.4.2 回波信号逻辑处理.............................................................................................- 22 - 3.4.3 时间计数脉冲的形成与计数 ............................................................................- 23 - 3.4.4 主控芯片..............................................................................................................- 24 - 3.4.5 液晶显示模块 .....................................................................................................- 26 - 3.5 超声探头........................................................................................................................- 26 - 3.5.1 超声换能器的分类.............................................................................................- 26 - 3.5.2 超声探头的选择与工作原理 ............................................................................- 28 - V
透镜焦距的测量实验报告
创作编号: GB8878185555334563BT9125XW 创作者:凤呜大王* 透镜焦距的测量 ***(201*******) (清华大学工程物理系,北京) 摘要利用焦距仪和已知焦距的长焦透镜测量了待测凸透镜和凹透镜焦距.分别用共轭法和焦距仪法测量了同一凸透镜焦距,分别用自准法和焦距仪法测量了同 一凹透镜焦距.实验测得凸透镜焦距为15.53cm(共轭法),15.62cm(焦距仪法),凹透镜焦距为-22.61cm(自准法),-22.67cm(焦距仪法).两种方法测得的透镜 焦距均符合得较好. 关键词凸透镜;凹透镜;焦距;焦距仪 1.概述 透镜是最基本的光学元件,根据光学仪器的使用要求,常需选择不同的透镜或透镜组.透镜的焦距是反映透镜特性的基本参数之一,它决定了透镜成像的规律.为了正确地使用光学仪器,必须熟练掌握透镜成像的一般规律,学会光路的调节技术和测量焦距的方法. 1.1实验目的 1)加深理解薄透镜的成像规律 2)学习简单光路的分析和调节技术 3)学习几种测量透镜焦距的方法 1.2薄透镜成像规律 透镜的厚度相对透镜表面的曲率半径可以忽略时,称为薄透镜.薄透镜的近轴光线成 像公式为: 其中:f为焦距,p为物距q为像距,y和y,分别为物的大小和像的大小,β为放大率. 1.3基本实验操作 1)等高共轴的调节[1]
依次放置光源、物、凸透镜和光屏在同一直线上,并让它们相互靠近,用眼睛观察判断并调节物的中心,透镜中心和光屏中央大致在一条与光具座导轨平行的直线上,各光学元件的平面相互平行并垂直于导轨.用梅花形物屏做物,用标有“+”的屏做像屏.使物与像屏间的距离大于透镜焦距的4倍,固定物屏和像屏滑块的位置.移动透镜,使物在光屏上两次成像,若所成大像和小像的中心重合在像屏“+”的中心,说明系统已处于等高共轴状态,反之则不共轴,此时应根据两次成像的具体情况做如下调节: (1) 若所成“大像”的中心不在“+”的中心, 则左右或上下调节物屏,使“大像”中心落在像屏“+”的中心. (2)移动透镜使物在像屏上成一小像, 若小像中心不在“+”的中心,则左右或上下调节透镜使小像中心落在“+”的中心. (3) 重复(1)、(2)两步骤、反复将大像和小像中心都调在像屏“+”的中心,直到所成大像和小像中心都重合在像屏“+”的中心为止. 2)凹透镜的使用 本实验所使用的凹透镜刻度不在凹透镜中心平面上,故实验操作时记录凹透镜位置每组至少应记录两次,分别将凹透镜双面朝同一方向,记录平均值作为本组实验的凹透镜位置. 2.共轭法测量凸透镜焦距 如果物屏与像屏的距离b保持不 变,且b>4f,在物屏与像屏间移动凸 透镜,可两次成像.当凸透镜移至O1 处时,屏上得到一个倒立放大实像, 当凸透镜移至O2处时,屏上得到一个 倒立缩小实像,由共轭关系结合焦距 的高斯公式得: 实验中测得a和b,就可测出焦距f.光路如上图所示: 2.1实验数据记录 物屏位置P=106.61cm,·像屏位置Q=2.30cm 1 2 3 4 5 6 O1位置(cm) 87.4 5 87.3 8 87.6 87.4 8 87.3 8 87.50 O2位置(cm) 21.1 0 21.1 8 21.1 8 21.1 21.0 8 作编号: GB8878185555334563BT9125X W 作者:凤呜大王*
光路调整和透镜参数的测量
光路调整和透镜参数的测量 透镜是光学基本元件,工程中常用它建立光路作为传输光能量和光信息,并是组成各种光学仪器的主要组件。不同的用途需要焦距不同的透镜或透镜组。通过测量透镜的焦距,我们可以掌握透镜成像规律,学会光路的分析和调整技术,这对了解光学仪器的构造和正确使用很有帮助,为探索其它学科提供了实际的手段和技能。 [预习要点] 1.什么是薄透镜?什么是近轴光线?透镜成像公式的使用条件是什么? 2.什么是自准法?它的光路及成像有什么特点? 3.什么是共轭法?用共轭法测透镜焦距有何优点? 4.什么叫等高同轴?用什么方法调节等高同轴? [实验重点] 1.加深理解透镜成像规律。 2.掌握简单光路、光轴的调节技术。 3.学习测量薄透镜焦距的方法。 4.学习不确定的计算方法。 [实验仪器] 光具座、凸透镜、物屏、像屏、白炽光源、平面镜、光具凳、光学平台、分光计(参阅教材P203,图4.3.2)。 [实验原理] 透镜的中心厚度(d)比透镜焦距f小很多,约为% d,我们称之为薄透镜。 f /≤ 5 1.薄透镜成像规律 (a)凸透镜(会聚透镜) 对光线具有会聚作用,当一束平行于透镜主光轴的光线通过透镜后,将会聚于主光轴上距透镜光心0为f的焦点F上,f OF=称为焦距,见图1(a)。 174
(b )凹透镜(发散透镜) 对光线具有发散作用。一束平行于透镜主光轴的光线通过透镜后,经折射变为发散光束,发散光的反向延长线与主光轴交于F 点,称焦点F 到透镜光心0的距离为焦距f ,见图1(b )。 在近轴光线的条件下,薄透镜的成像公式为: f q p 1 11 =+ (1) 式中,f —透镜的焦距,p 为物距,q 为像距。 符号规则: 物距p 为正值表示实物,为负值表示虚物。 像距q 为正值表示实像,为负值表示虚像。 焦距f 为正值表示凸透镜,又称正透镜;为负值表示凹透镜,又称负透镜。 2.透镜焦距的测量原理 (1)自准法(由光的可逆性原理求焦距) 这个方法是利用物距等于焦距使之产生平行光,在用平面镜把平行光原路返回到物屏上,看到成像。用像是否清晰检验调焦是否完成,用像所在位置检验透镜光轴与平面镜法线是否平行。 如图2,在凸透镜后面放一平面镜,当物距等于凸透镜焦距f 时,则物光经过凸透镜后成为平 行光,被平面镜反射回来的平行光再次经过凸透镜后所成的像也在焦平面上,且为倒像。据此就可测出焦距f 。 图1 透镜的焦距 图2 自准法测凸透镜焦距 图3 自准法测凹透镜焦距
钢板厚度测量系统
长沙理工大学钢板厚度测量系统 学院:汽车与机械工程学院 班级:车辆1102 学号:201169030201 姓名:侯健
钢板厚度测量系统 一、测量对象说明 本测量系统对象是普通钢板,但为保持测量灵敏度要求其厚度大于0.1mm,被测面应光洁、不应有洞眼、刻痕等,长度50mm、宽度30mm、厚度在0~16mm间。 二、测量原理框图 三、测量原理与方法说明 1.测量原理 如图1所示,在金属板一侧的电感线圈中通以高频激励电流I1时,线圈将产生高频磁场,由于集肤效应,高频磁场作用于金属板表面薄层,并在这薄层中产生涡流。涡流I2又会产生交变磁通Ф2反过作有于线圈,使得线圈中的磁通Ф1发生变化而引起自感量变化,在线圈中产生感应电势。电感的变化随涡流而变,而涡流又随线圈与金属板间距x而变化,因此可以用高频反射式涡流传感器来测量位移x的变化。图2为涡流效应等效电路。R1为线圈电阻;L1为线圈电感;R2为短路电阻;L2为短路环电感;U1为激励电压;M为线圈与短路环间的互感。
回路方程: 受涡流影响后线圈的等效阻抗为: 线圈阻抗只与L1、L2、M有关,而L1、L2、M都与x有关,即Z=f(x),因此,如固定传感器的位置,当间距x发生变化时,Z就发生变化,从而达到以传感器阻抗变化值来检测被测金属位移量的值。 传感器阻抗变化还需进一步转化为电信号以便进入数据采集系统。通常的测量方法式采取阻抗变换电路:电涡流传感器探头内线圈,与其它固定阻抗组成原始平衡电桥,随着钢板厚度的变化,探头线圈阻抗值随之变化,这样就破坏了电桥的原始平衡,失衡电桥的桥路输出电压值可反映被测钢板厚度值。除电桥法外,还有高精度的谐振调幅、调频等测量电路。 2、测量方法说明 利用高频反射式涡流传感器的原理,采用上下2路涡流传感器,被
车辆外廓尺寸检测公差
国家经济贸易委员会、公安部关于进一步 加强车辆公告管理和注册登记有关事项的通知 (国经贸产业[2002]768号) 各省、自治区、直辖市、计划单列市及新疆生产建设兵团经贸委(经委)、公安厅(局):为加强机动车安全管理,严格执行车辆“生产准入”和“行驶准入”制度,进一步规范《车辆生产企业及产品公告》(以下简称《公告》)管理和机动车注册登记管理,深化车辆产品管理体制改革,现将有关事项通知如下: 一、《公告》管理的范围 国家经贸委实施《公告》管理的车辆产品包括:在我国境内生产、销售并在道路上行驶的民用汽车产品及相应底盘、农用运输车、半挂车和摩托车产品。无轨电车、轮式工程机械车(含装载机、挖掘机等)、拖拉机、全挂车等不实行《公告》管理。 《公告》包括文本和光盘两部分,文本主要表述新产品批准(含产品扩展)、勘误更改和撤销等内容;光盘由本批新增产品数据库和历批汇总产品数据库两部分构成,记录产品的技术参数及产品照片等内容。文本和光盘配合使用。 公安交通管理部门要严格依据最新一批《公告》文本和配套光盘的汇总产品数据库办理车辆注册登记。在用车辆在办理过户、转出和转入登记时,要依据车辆在注册登记时发布的《公告》文本和配套光盘中的汇总产品数据库办理有关手续。未登《公告》的车辆产品或与《公告》公布的参数不符的车辆产品不得办理注册登记。不实行《公告》管理的车辆产品,公安交通管理部门依据生产企业提供的整车出厂合格证办理注册登记。 二、增加和调整强制性检验项目 (一)自2002年11月1日起,汽车生产企业申报《公告》的车型(包括改进型、扩展等,下同)必须符合《汽车和挂车侧面防护要求》(GB11567.1-2001)、《汽车和挂车后下部防护要求》(GB11567.2-2001)、《汽车燃油箱安全性能要求和试验方法》(GB18296-200 1)等3项国家标准的要求,并提供国家经贸委授权的检测机构(以下简称授权检测机构)出具的试验报告。 产品已列入《公告》的企业,自本通知发出之日起,要尽快使出厂产品符合上述3项国家标准的要求,并向国家经贸委报送由授权检验机构出具的试验报告。产品外型发生明显变化时,需提供有关照片。自2003年3月1日起,已列入《公告》的产品仍未安装符合上述标准的防护装置和燃油箱的,国家经贸委将在《公告》中予以撤销。 (二)自2003年1月1日起,装备驻车灯的车型申报《公告》时必须符合《汽车驻车灯配光性能》(GB18409-2001)要求,并提供由授权检测机构出具的试验报告。 (三)自2003年3月1日起,汽车企业申报《公告》的车型必须符合《用于保护车载接收机的无线电骚扰特性的限值及测量方法》(GB18655-2002)要求,并提供由授权检测机构出具的试验报告。 (四)自2003年1月1日起,汽车企业停止生产不符合《关于正面碰撞乘员保护的设计规则》(CMVDR 294)要求的微型客车产品,其库存产品最多允许继续销售6个月。自
实验一 薄透镜焦距的测定
实验一 薄透镜焦距的测定 【实验目的】 1. 进一步理解透镜成像的规律; 2. 掌握测量薄透镜焦距的几种方法; 3. 学会光具座上各元件的共轴调节方法。 【实验仪器】 光具座、凸透镜、凹透镜、平面镜、像屏、物屏、光源。 【实验原理】 1、薄透镜焦距的测定 透镜的厚度相对透镜表面的曲率半径可以忽略时,称为薄透镜。薄透镜的近轴光线成像 公式为:f s s 1 11'=+ (3—1—1) 式中s 为物距,s '为像距,f 为焦距。其符号规定如下:实物时s 取正,虚物s 取负;实像时s '取正,虚像时s '取负;f 为透镜焦距,凸透镜取正,凹透镜取负 。 (1) 位移法测定凸透镜焦距 (贝塞尔法又称共轭成像法) 如图1所示,如果物屏与像屏的距离A 保持不变,且A > 4f ,在物屏与像屏间移动凸透镜,可以两次看到物的实像,一次成倒立放大实像,一次成倒立缩小实像,两次成像透镜移动的距离为L 。 据光线可逆性原理可得:s 1= s 2′,s 2= s 1′,则2s ' 21L A s -= =,2 ' 12L A s s +==, 将此结果代入式(3—1—1)可得: A L A f 42 2-= (3—1—2) 只要测出A 和L 的值,就可算出f 。 (2) 自准直法测凸透镜焦距 光路图如图2所示。当物体AB 处在凸透镜的焦距平面时,物AB 上各点发出的光束,经透 镜后成为不同方向的平行光束。若用一与主光轴垂直的平面镜将平行光反射回去,则反射光再经透镜后仍会聚焦于透镜的焦平面上,此关系就称为自准直原理。所成像是一个与原物等大的倒立实像A ′B ′(此时物到透镜的距离即为焦距)。所以自准直法的特点是:物、像在同 物 像 像 屏 屏 图2 自准直法测凸透镜焦距
薄透镜焦距的测定
实验八 薄透镜焦距的测定 透镜是光学仪器中最基本的元件,反映透镜特性的一个重要参数是焦距。由于使用目的和条件的不同,需要选择不同焦距的透镜或透镜组,为了在实验中能正确选用透镜,必须学会测定透镜的焦距。常用的测定透镜焦距的方法有自准法和物距像距法。对于凸透镜还可以用位移法(共轭法)进行测定。 光具座是光学实验中的一种常用设备。光具座结构的主体是一个平直的导轨,另外还有多个可以在导轨上移动的滑块支架。可根据不同实验的要求,将光源、各种光学部件装在夹具架上进行实验。在光具座上可进行多种实验,如焦距的测定,显微镜、望远镜的组装及其放大率的测定、幻灯机的组装等,还可进行单缝衍射、双棱镜干涉、阿贝成像与空间滤波等实验。 进行各种光学实验时,首先应正确调好光路。正确调节光路对实验成败起着关键的作用,学会光路的调节技术是光学实验的基本功。 【实验目的】 1.学习测量薄透镜焦距的几种方法。 2.掌握透镜成像原理,观察薄凸透镜成像的几种主要情况。 3.掌握简单光路的分析和调整方法。 【实验仪器】 光具座(全套)、照明灯、凸透镜、平面反射镜、物屏、白屏等。 【实验原理】 1.薄透镜成像公式 由两个共轴折射曲面构成的光学系统称为透镜。透镜的两个折射曲面在其光轴上的间隔(即厚度)与透镜的焦距相比可忽略或者称为薄透镜。透镜可分为凸透镜和凹透镜两类。凸透镜具有使光线会聚的作用,即当一束平行于透镜主光轴的光线通过透镜后,将会聚于主光轴上的一点,此会聚点F 称为该透镜的焦点,透镜光心O 到焦点F 的距离称为焦距f 图1(a)。凹透镜具有使光束发散的作用,即当一束平行于透镜主光轴的光线通过透镜后将偏离主光轴成发散光束。发散光的延长线与主光轴的交点f 为该透镜的焦点。如图1(b) 近轴光线是指通过透镜中心部分与主轴夹角很小的那一部分光线。在近轴光线条件下,薄透镜成像的规律可表示为 f u 111=+υ (1) 式中u 为物距,υ为像距,f 为透镜的焦距。u 、υ和f 均从透镜光心O 点算起。物距u 恒取正值,像距u 的正负由像的虚实来决定。当像为实像时,υ的值为正:虚像时,υ的值为负。对于凸透镜,f 取正值;对于凹透镜,f 取负值。
薄透镜焦距的测量完整版
一、实验原理: 薄透镜是指其厚度比两球面的曲率半径小得多的透镜。透镜分为两大类:一类是凸透镜(也称为正,对光线起会聚作用。焦距越短,会聚本领越大。另一类是凹透镜(也称负透镜透镜或会聚透镜),对光线起发散作用。焦距越短,发散本领越大。或发散透镜)在近轴光束(靠近光轴并且与光轴的家教很小的光线)的条件下,薄透镜(包括凸、凹透镜) 的成像公式为:111?? 1)…………(fuvvuuvf为正;虚为物距;为焦距。它的正、负规定为:实物、实像时,为像距;式中:、vuff为负。利用上式测定焦距,可以有几种方为正,凹透镜为正,为负;凸透镜物、虚像时,法,除了本实验中的方法以外,还可用焦距仪测量。利用上式时必须满足: a.薄透镜; b.近轴光线。 实验中常采取的措施是:在透镜前加一光阑以去边缘光线;a. 调节各元件使之共轴。b. 一般透镜中心厚度有几毫米,也会给测量带来一定的误差。当不考虑透镜厚度时,会有百分之几的误差,这是允许的。 1. 凸透镜焦距的测量方法 )物距像距法(1 vu及像距,利用(由实验分别测出物距1)式,求出焦距:uv?f)……(2vu?2)自准法(fu???v, 即当物体上各点发出的光经透镜后,变为不同方)式可知,当像距时,1 从(故为自准法,见下图。该方法利用实验装置本身产生平行光,向的平行光时,物距即为透镜的焦距。 )位移法 1 f4D?间移动可在屏上两次成像,如下图所示,一次成D当物AB与像屏的间距时,透镜在放大的像,另一次成缩小的像。 由公式(1)与图中的几何关系可得:111??……(3)fD?uu11111?? 4)……(f?d?dD?uu11由上两式右边相等得:??d?D?u)……(512将(5)式代入(3)式得:????22dDD?dd?D???f)……
车辆外廓尺寸国内外检测技术
车辆外廓尺寸国内外检测技术 1、三坐标测量 国际上对于大型物体三维尺寸的测量,广泛采用的仍是三坐标测量机,三坐标测量机的测量原理是将被测件放入其容许的测量空间以获得被测件几何型面上测量点的坐标尺寸。根据这些点的空间坐标值计算出被测件的几何形状位置尺寸及其不确定度。 三坐标测量时,不可避免地出现被测物体变形、蠕变、动作响应慢、需补偿测量头直径等问题,极大地影响了测量效率和测量精度。另外测量所需条件苛刻又限制了它在“在线测量”中的应用。尽管世界各国生产厂家试图用各种高新技术来改变这一状态,但至今都不能从根本上解决三坐标测量机价格昂贵以及原理上所带来的结构庞大、复杂的不足,难以满足当今高效率、高精度测量的需要。 2、室内GPS 测量系统 测量时,空间中事先布置好的激光发射器不断向四周发射红外光线信号,传感器检测到红外线信号并由接收器将信号转化成为角度数据,通过软件处理最终将数据转化为位置与方位信息。iGPS测量法虽然能实现动态实时、自动测量,但该方法价格昂贵,而且测量精度较低,一般只能达到厘米级。由于其测量点数较少,在工业环境中受外界因素干扰较大,因此,不能满足对于车体车厢轮廓测量的要求。 3、激光跟踪仪测量系统 用激光跟踪仪进行测量,是国内进行飞机尺寸检测的主要途径之一。它通过测量待测点的角度和距离信息来获得待测点的空间坐标。由于激光需要通过跟踪靶球的反射进行逐点测量,而且在目前的技术条件下,跟踪仪只能做到单点或者双点追踪。对于汽车车体而言,激光跟踪仪是单点测量,测量效率无从谈起,所以无法满足项目要求。 4、经纬仪测量系统 经纬仪测量系统起源于大地测量仪器,至少需要两台或两台以上的高精度光学经纬仪组合在一起,才能构成测量系统来获取目标点的空间三维坐标。经纬仪利用数据库来管理测量数据,并对测量数据进行初步的几何分析。与形状误差的检测。这种通过软硬件数据相结合的测量方法对于本方案的设计有一定的启发作用,但是经纬仪坐标需要多台仪器同时人工瞄准,效率低,人为误差明显。
实验17 透镜焦距的测量
实验十七 透镜焦距的测量 实验目的:用物距像距法、共轭法求焦距、自准直法求焦距、由辅助透镜成像法求凹 透镜焦距四种方法测透镜焦距 实验原理:1、物距像距法:如图所示设凸透镜 的焦距为 f ,物距为P ,对应像 距为' P ,则透镜成像的高斯公式为 f p p 111'=-, 得到:' ' p p pp f -= 2、共轭法求焦距:取物与屏之间的距离L 大于四倍焦距4f ,此后固定物与 屏的位置,移动透镜,则必能在屏上两次成像,如图所示,透镜位于I 时,得到放大像;位于II 时得到缩小像,透镜在两次成像之间的位移为d ,根据透镜公式,对于位置I 而言, () ' 2 1p d L p ---=, ' 2 '1p d p += 则:()L p d p d L f )('2 '2 +--= 对于位置II 而言, ' 2 '22)(p p L p =--=,像距 则: L p p L f ' 2 '2)(-= 解得:2' 2 d L p -=,故:L d L f 42 2-= 3、自准直法求焦距:如图所示,当光源P 作为物 放 在 透镜L 的第一焦平面内时,由P 发出的光经透镜后将成为平行光,如果在透镜后面放一与透镜光轴垂直的平面反射镜M ,则平行光经M 反射后将沿原来的路径反方向进行,并成像于P 点,P 与L 之间的距离,就是透镜的焦距f 。 4、由辅助透镜测凹透镜的焦距:对于凹透镜,因 为实物不能得到实像,所以不能用白屏接取像的方法求
得焦距,可以利用辅助透镜成像的方法求得焦距。 物P 经凸透镜' P ,在' P 和1L 间放上待测凹透镜L ,就L 而言,虚像' P 又成像于' 'P ,根据公式得, 2 '111f p p =- 因此,' ' 2p p pp f -= 只要测得p, 'p 的绝对值,就可得凹透镜得焦距。 实验仪器:光具座,凸透镜,凹透镜,平面镜,屏,小灯狭缝,滤光片 实验步骤:1、光具座上各元件共轴的调节,要求:(1)所有元件的光轴重合,(2) 公共的光轴与光具座的导轨严格平行。方法:(1)粗调:把透镜,物, 屏用光具夹夹好后,先将他们靠拢,调节高低,左右,使光源,物,透镜,屏的平面互相平行且垂直于导轨;(2)细调;依靠成像规律进行细调,如果物的中心偏离透镜的光轴,那么在移动透镜的过程,像的位置会改变,即大像和小像的中心不重合,这是要根据便宜的方向判断物中心究竟是偏左还是偏右,偏上还是偏下,然后加以调整。 2、用白炽灯照亮狭缝,在狭缝处插入滤光片,一透光狭缝作为物,将狭缝 及白屏放置在光具座上,相隔一定距离,然后在它的中间放入待测凸透镜,移动透镜,使屏上得到清晰的狭缝像,记录各光具所在位置,计算物距,像距,算出焦距f.。重复三次,求平均值。 3、将狭缝光源与屏固定在间距大于4f 的位置,测出它们之间的距离,将 待测凸透镜放在光源于白屏之间,移动凸透镜,是屏上得到清晰的狭缝像,记录透镜位置,移动透镜至另一位置,使屏上又得到清晰的狭缝像,记录透镜位置,由两个位置算出距离d 并由(3)求出f ,重复三次,求平均值。 4、讲光具座上的器件放好,移动凸透镜L 和改变平面反射镜M 的方位, 使在狭缝平面上形成一个余下缝大小相同,得清晰像,测出狭缝平面到透镜的距离f ,即得到透镜的焦距,重复六次,求平均值。 5、先用辅助凸透镜1L 把狭缝P 成像于' P 处的屏上,记录P 的位置,然后 将待测凹透镜L 置于1L 与P 之间的适当位置,并将屏向外移至' 'P ,使屏上重新得到清晰的像,分别测出' 'P 与' P 至L 的距离,这两个距离对L 来说,分别代表,物距p 和像距''p ,由公式(4)算出2f ,改变透镜的位置,重复三次,求平均值。 数据处理:
透镜参数的测量
核科学技术学院 2010 级 学号 PB10214023 姓名 张浩然 日期 2011-5-2 透镜参数的测量 PB10214023 张浩然 一、实验题目:透镜参数的测量 二、实验目的:了解光源、物、像之间的关系以及球差、色差产生的原因,熟练掌握光具座上各种光学元件的调节并且测量薄透镜的焦距和透镜的球差和色差 三、实验器材:光具座(包括光源、物屏、凸透镜、凹透镜、像屏等器具) 四、实验原理: 1、符号规定:总结为顺光线方向为正,逆光线方向为负。 2、高斯成像公式: 设p 为物距,q 为像距,物方焦距为f 1,像方焦距为f 2,则有 11 2=+p f q f 空气中f 2=-f 1=f ,则公式变成f p q 1 11=- 3、测凸透镜焦距 (1)直接法 测得光线会聚点和透镜中心的位置x 1、x 2,则f=|x 1-x 2| (2)公式法 如图测得p 、q ,利用高斯公式进行计算 (3)平面镜反射法 利用平面镜反射在物屏上成清晰的像,从而得到焦距f (4)位移法 当屏与物的距离A>4f 时,有两个清晰成像的位置,记两个位置之间的距离为l ,则A l A f 42 2-= 4、辅助透镜测量凹透镜焦距: 凹透镜将实物成虚像,故通过凸透镜成像后,将像作为凹透镜的物,从而在屏上得到实像,
核科学技术学院 2010 级 学号 PB10214023 姓名 张浩然 日期 2011-5-2 再利用式f p q 1 11=-计算f 五、数据处理: 1. 公式法测凸透镜焦距 实验数据有: x 又由:物距有10p x x =-像距有20q x x =-焦距有f p q =- 对于焦距f : 平均值:6 1 110.2966i i f f cm ===∑ 对于每组测量值,由于相对独立,则有: 对于每一组的像距和物距: A 类不确定度为:0A u = B 类不确定度:0.0200.006673 B B cm u cm C ?= == 有展伸不确定度:0.950.0131 0.95u cm p = ===
如何正确选用车辆外廓尺寸测量仪
龙源期刊网 https://www.360docs.net/doc/a14982460.html, 如何正确选用车辆外廓尺寸测量仪 作者:黄和跃 来源:《中国新技术新产品》2015年第15期 摘要:依据国家标准GB 21861-2014《机动车安全技术检验项目和方法》的第5.2条关于“重中型货车、专项作业车、挂车应使用外廓尺寸自动测量装置”的要求(两年过渡期,有条件的地方可以先上)。外廓尺寸测量仪是一种新兴的检测设备,多数检测站还是缺少了解的。在这主要从各种外廓尺寸检测设备采用的技术原理和方法;以及法规、技术标准和实际使用对设备的要求,对外廓尺寸测量仪的选型作了初步探讨,以供大家设备选型参考。 关键词:外廓尺寸测量仪;技术原理和方法;法规、技术标准和实际使用;选用 中图分类号:U495 文献标识码:A 近几年国内外对于车辆外廓尺寸检测技术的研究有多种多样,国内的设备厂商也有过不同的研究。目前国内生产汽车外廓尺寸测量仪的厂家很多,但产品质量良莠不齐。设备产品按技术原理和方法总体说来有以下几种。 1 CCD测量原理 机动车外廓尺寸采用CCD的测量方法。是在测量区域的顶部、侧面安装多个摄像机,采用接力棒的方法,对检测车辆在运动过程中,采用取景框的方法从长、宽、高不同的位置同时对被测车辆进行局部摄像,通过计算机图像处理算法将被测车辆的长、宽、高进行拼接,整合出被测车辆长、宽、高三方面的数据,采用这种方法的优点是安装比较方便,结构简单,成本低廉。 采用CCD摄像机的测量方式,还会遇到以下几个问题:(1)CCD摄像机易受外界光的 干扰,对检测环境和检测对象(车型)有要求。在一些光线特别强摄像机容易饱和,在比较弱的情况下,车辆轮廓曲线不清晰,物体表面曲率受光线变化等诸多因素,会影响特征点提取的准确性、对应点的精确匹配等问题,这些都最终会影响测量数据的准确度。(2)相机标定问题。视觉检测系统要达到较高的测量精度,必须要对摄像系统进行高精度的标定,但是实际摄像系统总是存在着各种误差,特别是镜头畸变误差、目标图像提取误差、摄像系统参数求解舍入误差等,使得物点、光心和像点很难严格满足共线条件,因此其测量精度只能在±1%左右。 2 激光扫描式测量原理 采用激光扫描测量的车辆外廓尺寸测量仪,由3个激光扫描仪组成,测量车辆宽度和高度的方法是在测量区安装在左右两侧上方的两个激光扫描仪,测量车辆长度的扫描仪,安装在车辆行驶方向的正前方的上方,并与安装在左右二侧的激光扫描仪互为90°垂直,测量车辆高度与宽度的方法是对按一定匀速运动中车辆进行扫描,对车辆顶面和两侧的表面进行扇面扫描,
光具组基点的测定
光具组的基点 摘要:本文主要介绍了如何利用光学参数测定仪的测节装置,测定透镜组的基点,加深对透镜组基点的理解和认识。 关键词:光具组主点主平面焦点焦平面节点节面 引言:任意实际光学系统都是由多个透镜组合而成。日常生活所用的光学仪器,如照相机镜头、显微镜物镜、目镜等,并非是单一薄镜头,而是由多个具有一定厚度的透镜组成的光组。 光组的作用和透镜相同,但成像质量更好。为了使成像问题变得更为简单,可以求出实际光学系统的三对基点,利用这些基点,就可以用一个等效的光具组代替整个实际光学系统,不必去考虑光在该系统中的实际路径,从而确定像的大小和位置,使成像问题大大简化。坐标原点如何更改,使高斯公式和横向放大率公式也适用于光组和薄透镜,是本实验的首要问题。 在光学中,由中心在同一直线上的两个或两个以上的球面组成的系统,称为共轴光组。共轴光组是最简单的一种球面组合系统,也是一般复杂光学系统的基本单元。若物方有一点、一直线或一平面,像方只有一点、一直线或一平面与之对应,则该系统称为理想共轴光组。当把共轴系统作为一个整体,而不逐一的研究每一个面的成像时,则可用系统的几个特别的点来表征系统的成像上的性质,这几个特别的点就是系统的主焦点、主点和节点,它们统称为系统的基点。无论共轴球面系统的具体布置如何,只要得知系统的这几个点,便可用非常简单的高斯公式或牛顿公式,计算共轭点的位置和成像的放大率等等。实验中采用测节器来测定光具组的基点。 原理: 测节器基本原理:如图1,设M、M’为光组二主平面,因光组在同一媒质中,光组的二主点主面与光轴之交点H、H’分别与N、N’相重合,F’为第二焦点。设平行光如图射至光组后会聚与Q点,光束中通过第一节点N的光线PN,按节点角放大率K=±1的性质,透射光中必有光线N’Q与其共轭,且N’Q//PN,N’ 即为第二节点。现假定光组绕N’点 转过θ(图中虚线示)。引入射光束方 向未变,原先通过第一节点N之光线 现变为P1N1,它与主光轴的夹角为α 1,过N1点作辅助平行线原光轴后不 难证明α’+θ=α1,说明P1N1//N’Q, 成像光线N’Q并未因光组的旋转而 改变方向和位置,即像点Q不因光组 可以整组前、后移动,同时还可以绕 垂直于它的主光轴的轴而转动。这就 可以在边移动、边转动中找出不因光
薄透镜参数测量报告
薄透镜参数测量 学院: 班级: 姓名: 学号: 年月日
薄透镜参数测量 一、实验任务 透镜时组成各种光学仪器的基本光学元件,掌握透镜基本参数的测量,对于了解光学仪器的构造和性能学会光路的分析和调整技术是很有必要的。本实验设计出各种光路,用来测量透镜的各种基本技术参数。 二、实验要求 1. 设计光路,用两种方法测量所给透镜的焦距 2. 设计光路,测量所给透镜的色差 3. 设计光路,测量所给透镜的球差 三、实验原理 (1)凸透镜成像原理 光屏距透镜小于一倍焦距成虚像,一倍焦距成一点,一倍到二倍之间成倒立放大实像,二倍成等大实像,二倍焦距以上成倒立缩小实像。 (2)凸透镜——倒立.缩小.实像(u > 2f)
在图1-1中,AB 是物体,A'B'是经凸透镜所成的像。由于△COF 和△A'B'F 是两个相似三角形,所以 (O 点为镜片中心点,即镜片与光轴的交点) 又因为△ABO 和△A'B'O 也是相似三角形,所以 因为,CO=AB ,所以上面两个式子左边相等,因而这两个式子的右边也相等: 但是,OF=f ,F=v-f ,BO=u ,B'O=v 。把这些值代入上式,就得到: 化简得 fv + fu = uv 用uvf 除这个式子的两边,就得到凸透镜的成像公式: 四、实验方案 1. 用直接法粗侧焦距。 如图所示, 用平行光垂直照到透镜上,测量聚焦点得距离2x ,记透镜中心的位置为1x ,那么 21f x x =-。 2. 用共轭法测量焦距 如图所示,
设凸透镜的焦距为f 。使物与屏的距离4b f >并保持不变,如图所示。移动透镜至1 O 处,在屏上成放大实像,再移至2O 处,成缩小实像。令1O 和2O 之间的距离为d ,物到屏(像)的距离为D 。根据共轭关系有'21s s =,'21s s =,由透镜成像公式和上图给出的几何关系可导出: 224D d f D -=。 实际测出D ,d 就可以求出焦距f 。 3. 将高压汞灯前放上滤色镜观察和测量透镜所产生的色差 如图所示: 用高压汞灯分别加黄绿色、蓝紫色两种滤光片以选取不同波长的光照射“1”字屏,通过调节光屏距透镜距离出现实像,测量不同波长的光入射时透镜的焦距以及成像高度,计算两波长所测数据之差轴向色差和横向色差。 4. 将可变光阑放在光路中,观察和测量透镜的球差 如图所示: 用高压汞灯照射“1”字屏,在紧靠透镜后放一光阑,以调节透过光线,记下近场和远场光线像的位置及高度,计算纵向球差和横向球差。
车辆外廓尺寸测量系统介绍
成都成保发展股份有限公司 JW-1型机动车外廓尺寸检测系统 产品介绍 1.前言 JW-1型机动车外廓尺寸检测系统,采用高速动态激光扫描传感器,非接触的自动扫描机动车外廓形状,利用算法处理实时得到高精度的机动车外形尺寸(如机动车的长、宽、高及轴距等)。本系统完全满足国家标准GB7258-2012《机动车运行安全技术条件》、国家标准GB21861-2014《机动车安全技术检验项目和方法》的要求,广泛适用于机动车安全检测站、汽车制造厂等单位。 2.技术特点 2.1 本系统采用三部高速动态激光扫描传感器,其中两部安装在机动车外廓尺寸测量车道左右两侧,其中一部传感器安装在机动车外廓尺寸测量车道后方。本系统自动对在车道上行驶的车辆进行扫描。 2.2在车辆外廓尺寸测量中,激光扫描传感器相对于其他类型的传感器(图像、光幕和超声等方式)具有独到的应用优势和数据特征。 1)测量距离远,测量距离高达50m; 2)测量精度高,对于大型车辆的长、宽、高,测量误差不超过0.8%(95%的置信区),测量分辨率为1mm; 3)测量速度快,整车通过测量后8秒内可得到测量结果。 4)环境适应强,不受环境光的影响,即使在夜间和室外的工作环境也能正常工作。 2.3 本系统采用网络化接口,系统软件与与汽车安全性能检测线无缝连接,并集成了车辆拍照模块,实现实时数据交换及检测调度。完全满足国家标准 GB21861-2014、GB/T 26765-201《机动车安全技术检验业务信息系统》、行业标准GA1186-2014《机动车安全技术检验监管系统通用技术条件》等标准的要求。本系统留有与各级管理部门的联网接口,可根据用户及当地管理部门的要求进行编程。 2.4 系统软件为WINDOWS 操作系统,采用可视化编程工具、SQL 数据库,人机界面合理,检测功能强大,检测效率高,操作简便、易维护,可扩展性强、联网兼容性高。 2.5 本系统可以安装在检测线的外检和检测车间内,安装位置可以选择工位之间20-22米处(可视现场情况进行调整)。 2.6 检测场地:长×宽:5×22米,采用通道式过车,特殊要求另行协商。 3.技术参数