用悬臂梁式称重传感器设计一个电子天平

用悬臂梁式称重传感器设计一个电子天平
1.设计思路
本实验采用悬臂梁式称重传感器,所称物体产生的压力由称重传感器检测,并由传感器测量电路转化为相应的模拟电信号输出。称重传感器输出的模拟量,数值一般很小,达不到A/D转换接收的电压范围。所以送A/D转换之前要对其进行前端放大、整形滤波等处理。然后输出信号再经由A/D转换电路转化为相应的数字量。由于本实验采用的ICL7107是3位半双积分型A/D转换器,能直接驱动共阳极LED数码管,故不需要使用单片机进行相应的数据处理和转换,ICL7107将模拟量转换为数字量之后直接将其转化成七段LED显示所需的字型码,输入到相应的信号电极就实现了所称物重数字量的输出。
2.设计方案
将电阻丝应变片粘贴到悬臂梁上合适的位置,并接入全桥测量电路,相对的桥臂受力相同,相邻的桥臂受力相反,其中一对受拉力作用,另一对受压力作用。由于电阻丝在外力作用下发生机械变形时,其电阻值发生变化,从而引起电压发生变化,即电桥的输出电压反映了相应的受力状态。利用电桥传感器测应力的变化,可以间接的测量物体的质量。传感器测出的信号经过放大电路放大处理成为符合A/D输入范围的电信号后进入A/D转换器,最后通过芯片内部电路将转换后的数字量转化为LED可识别的七段字型码送交LED显示器显示。
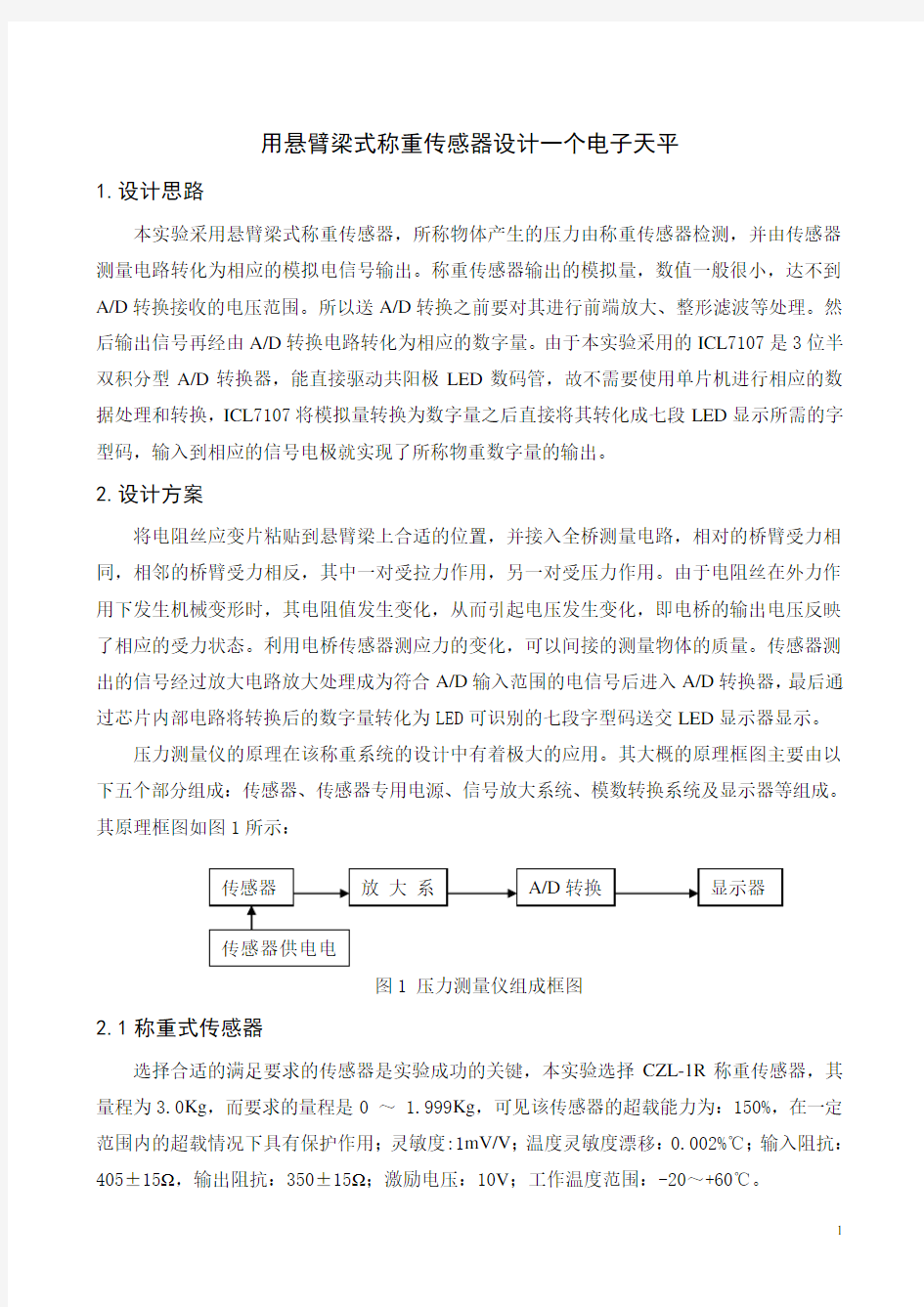
压力测量仪的原理在该称重系统的设计中有着极大的应用。其大概的原理框图主要由以下五个部分组成:传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等组成。其原理框图如图1所示:
传感器放大系A/D转换显示器
传感器供电电
图1 压力测量仪组成框图
2.1称重式传感器
选择合适的满足要求的传感器是实验成功的关键,本实验选择CZL-1R称重传感器,其量程为3.0Kg,而要求的量程是0 ~ 1.999Kg,可见该传感器的超载能力为:150%,在一定范围内的超载情况下具有保护作用;灵敏度:1mV/V;温度灵敏度漂移:0.002%℃;输入阻抗:405±15Ω,输出阻抗:350±15Ω;激励电压:10V;工作温度范围:-20~+60℃。
2.2传感器测量电路
称重传感器的测量电路通常使用电桥测量电路,它将应变电阻值的变化转换为电压的变化,这就是可用的输出信号。电桥电路由四个电阻组成,如图2所示:桥臂电阻R1,R2,R3和R4,其中两对角点AC接电源电压V
U SL10
=,另两个对角点BD为桥路的输出U SC,桥臂电阻为应变电阻。
图2 传感器电桥测量电路
没有外界压力作用时,电桥平衡,则测量对角线上的输出U SC为零。当传感器受到外界物体重量影响时,电桥的桥臂阻值发生变化,电桥失去平衡,则测量对角线上有输出,即U SC。
≠
2.3传感器供电电源
参考图2,设四个桥臂的初始电阻相等且均为R,当有重力作用时,两个桥臂电阻增加△R,而另外两个桥臂的电阻减少,减小量也为△R。由于温度变化影响使每个桥臂电阻均变化△RT。这里假设△R远小于R,并且电桥负载电阻为无穷大,则电桥的输出为:USC= E*(R+△R+△RT)/( R-△R+△RT +R+△R+△RT)- E*( R-△R+△RT)/( R+△R+△RT +R-△R+△RT) = E*△R/(R+△RT)
即USC= E*△R/(R+△RT)
说明电桥的输出与电桥的电源电压E的大小和精度有关,还与温度有关。如果0
?RT,则
≠
电桥的电源电压E恒定时,电桥的输出与△R/R成正比。当△RT≠0时,即使电桥的电源电压E恒定,电桥的输出与△R/R也不成正比。这说明恒压源供电不能消除温度影响。
另外,使用电压表监测传感器的供电电源(用数字万用表电压挡测量输出电压),必须保证供给传感器的电压是恒定值,才能保证传感器的输出信号与被测量呈线性关系。
2.4放大系统
首先,压力测量仪的放大系统是把传感器输出的微弱信号进行放大,放大的信号应能满足模数转换的要求。该系统使用的模数转换是3位半A/D转换,所以放大器的输出应为0V~1.999V。要求灵敏度为1mV/V,其输出信号只有0 ~10mV左右;而A/D转换的输入应为0V~ 1.999V,对应显示0 ~ 1.999Kg,当量为1mV/g,因此要求放大器的放大倍数约为200倍,一般运算放大器的放大倍数为100左右,故采用二级放大器阻容连接组成。
其次,为了准确测量,放大系统应保证输入级是高阻,输出级是低阻,系统应具有很高的抑制共模干扰的能力。在电路设计过程中需要考虑电路抗干扰环节及稳定性。尽量选择低失调电压,低漂移,稳定性高,经济性好的芯片。电源电压为±12V。
最后,考虑到温漂,失调电压,秤盘重量,称重过程中可能产生的电路冲击和震荡等影响测量精度的实际因素,电路中还应有调零和调增益的环节,在称重前对电子天平进行反复调零,以保证电子天平在没有称重时显示零读数;并且测压力时读数正确反映被测压力。2.5模数转换及显示系统
传感器的输出信号放大后,通过模数转换器把模拟量转换成数字量,本实验中采用ICL7107三位半双积分型AD转换器来实现模数转换,芯片型号:ICL7107CPL;芯片封装:DIP40;该芯片的基本特点如下:
①ICL7107是31/2位双积分型A/D转换器,属于CMoS大规模集成电路,它的最大显示值为士1999,最小分辨率为100uV,转换精度为0.05士1 个字。
②能直接驱动共阳极LED数码管,不需要另加驱动器件,使整机线路简化,采用士5V两组电源供电,并将第21脚的GND接第30脚的IN。
③在芯片内部从V+与COM之间有一个稳定性很高的2.8V基准电源,通过电阻分压器可获得所需的基准电压VREF。
④ 能通过内部的模拟开关实现自动调零和自动极性显示功能。
⑤ 输入阻抗高,对输入信号无衰减作用。
⑥ 整机组装方便,无需外加有源器件,配上电阻、电容和LED共阳极数码管就能构成一只直流数字电压表头。
⑦ 噪音低,温漂小,具有良好的可靠性,寿命长。
⑧ 芯片本身功耗小于15mw(不包括LED)。
⑨ 设有一个专门的小数点驱动信号。使用时可将LED共阳极数码管公共端接V+.
⑩ 可以方便的进行功能检查。
因为ICL7107转换器能直接驱动共阳极LED数码管,不需要另加驱动器件,使整机线路简化,所以只要在该芯片上配接LED共阳极数码管就能构成满足要求的数字显示表。
3.单元电路设计
3.1传感器的测量电路图
传感器的测量电路如图2所示,这里再做一点补充说明。图中两对角点AC接标准电源电压V
U SL10+=,为保证测量的精度,可以对电压进行检测。另两个对角点BD为桥路的输出电压U SC,桥臂电阻为应变电阻。四个桥臂的初始电阻相等且均为R,当有重力作用时,受拉的两个桥臂电阻增加△R,而另外两个受压的桥臂电阻减少,减小量也为△R。
传感器电桥测量电路
考虑温度影响,电桥输出信号为USC= E*△R/(R+△RT),由于电路中设置了调零旋钮,可在称重前先对天平进行调零再称量读数,故温度对测量精度的影响可降到最低。
3.2放大电路
根据要求,放大器的放大倍数应为200倍左右,故采用两级放大电路级联组成满足要求的放大器。第一级的放大倍数为-10,第二级的放大倍数为-20,即整个电路的放大倍数为200,具体参数参看图3。
其次,在电路设计过程中必须要考虑电路的抗干扰性能和稳定性,以及低失调电压,漂移等影响因素,于是在电路中设置了调整端子。图3中,在运算放大器的反相端接入电阻R4和电位器RP进行零点调整。为了准确测量,该放大系统的设计遵循了保证输入级是高阻,输出级是低阻的原则,系统具有很高的抑制共模干扰的能力;电源电压为±12V和±15V。
具体的运算放大电路如下图所示:
图3 由分立原件组成的放大电路
3.3模数转换及显示电路
本实验中采用ICL7107三位半双积分型AD转换器来实现模数转换,它能直接驱动共阳极LED数码管,不需要另加驱动器件。故较容易构成满足要求的数字显示表,如图4所示。对ICL7107的相关引脚功能做如下说明:V+和V-分别为电源的正极和负极,a1-g1,a2-g2,a3-g3 依次对应从低到高前三位笔画的驱动信号,依次接各位LED显示器的相应笔画电极;Bck:最高位笔画驱动信号,接最高位LED显示器的相应笔画电极,驱动最高位显示0和1;PM:液晶显示器背面公共电极的驱动端;Oscl-OSc3:时钟振荡器的引出端,外接阻容或石英晶体组成的振荡器。第38脚至第40脚电容量的选择是根据下列公式来决定,Fosl = 0.45/RC;COM :模拟信号公共端,简称“模拟地”,使用时一般与输入信号的负端以及基准电压的负极相连;TEST :测试端,该端经过500欧姆电阻接至逻辑电路的公共地;VREF+VREF-是基准电压正负端;INT:27是一个积分电容器,必须选择温度系数小不致使积分器的输入电压产生漂移现象的元件;IN+和IN- :模拟量输入端,分别接输入信号的正端和负端;AZ 是积分器和比较器的反向输入端,接自动调零电容CAz,应用在2V满刻度是0.047μF;BUF 是缓冲放大器输出端,接积分电阻Rint。其输出级的无功电流( idling current)是100μA,而缓冲器与积分器能够供给20μA的驱动电流,从此脚接一个Rint至积分电容器,其值在满刻度为2V时选用470K。
ICL7107的各管脚及相关外接电路如图4所示:
图4 ICL7107的引脚及外接电路图
3.3.1转换器ICL7107的工作原理
双积分型A/D转换器ICL7107是一种间接A/D转换器。它通过对输入模拟电压和参考电压分别进行两次积分,将输入电压平均值变换成与之成正比的时间间隔,然后利用脉冲时间间隔,进而得出相应的数字量输出。
它的原理性框图如图5所示,它包括积分器、比较器、计数器,控制逻辑和时钟信号源。积分器是A/D转换器的心脏,在一个测量周期内,积分器先后对输入信号电压和基准电压进行两次积分。计数器对反向积分过程的时钟脉冲进行计数。控制逻辑包括分频器、译码器、相位驱动器、控制器和锁存器。分频器用来对时钟脉冲逐渐分频,得到所需的计数脉冲fc和共阳极LED数码管公共电极所需的方波信号fc。译码器为BCD-7段译码器,将计数器的BCD 码译成LED数码管七段笔画组成数字的相应编码。驱动器是将译码器输出对应于共阳极数码管七段笔画的逻辑电平变成驱动相应笔画的方波。控制器的作用有二个:第一,识别积分器的工作状态,适时发出控制信号,使各模拟开关接通或断开,A/D转换器能循环进行。第二,当输入电压超量限时发出溢出信号,使最高位显示“1" ,其余码全部熄灭。锁存器用来存放A/D转换的结果,锁存器的输出经译码器后驱动LED。
图5 ICL7106A/D转换器原理
3.3.2 A/D转换的测量周期
它的每个测量周期分为自动调零(AZ)、信号积分(INT)和反向积分(DE)三个阶段第一阶段:转换开始前(转换控制信号VL=0) ,先将计时器清零,并接通开关S0 ,使积分电容C完全放电;第二阶段:令开关S1合到输入信号V1一侧,积分器对V1进行固定时间Tl的积分,结果为:V=-T1V1/RC,该式说明,在Tl固定条件下V0与Vl成正比;第三阶段:向令开关S1转至参考电压VREF一侧,积分器反向积分。如果积分器的输出电压上升至零时,所经过的积分时间T2则可得,可得到T2=T1V1/Vref;令时钟脉冲CD的周期为Tc,计数器在T2时间内计数值为N得:T2=N·Tc ,代入上式得:N=T1Vi/TcVref;分析得T1,Tc和VREF 固定不变,计数值N仅与VIN成正比,实现了模拟量到数字量的转变。
图6 ICL7107与LED接线电路图
LED数码管与A/D转换器的连接如图6所示,ICL7107将七段显示码输出给LED并直接驱动LED显示,其中最高位只显示0和1,其余三位显示0-9各数。
完整的电路原理图如下所示:
图7 电路原理图
3.3.3 A/D 转化过程的时间分配
假设时钟脉冲频率为40KHz ,每个周期为4000Tc ,如图5所示,每个测量周期中三个阶段工作自动循环。
图8 双积分型A/D 转换器的电压波形图
各阶段时间分配如下:
①信号积分时间Tl 用1000Tc 。
②信号反向积分时间T2用0一2000Tc ,这段时间的长短是由VIN 的大小决定的。
③自动调零时间T0用1000-3000Tc 。
从上面的分析可知,Tl 是待定不变的,但T2随VIN 的大小而改变。因为:T
T
T T C C C 10001=选基准电压VRFF = 100.0mv ,由:V T V
T REF C IN I
可得:N V IN 1.0=。
满量程时N=2000,同样由上式可导出满量程时VIN 与基准电压的关系为:VIN=2VREF 。为了提高仪表的抗干扰能力,通常选定的采样时间Tl 为工频周期的整数倍。我国采用50Hz 交流电网,其周期为20ms ,应选T1=n×20ms 。n= l ,2,3……n 越大,对串模干扰的抑制能力越强,但n 越大,A/D 转换的时间越长。因此,一般取Tl=100ms ,即f0=40KHz 。 由T0=2RC*1.1=2.2RC (T0为振荡周期),得RC RC f o 45
.02.21=≈。
由上式可知,当f0=40KHz 时,阻容元件的选取并不唯一,只要满足要求即可。
ICL7107主要参数如下表:
电源电压ICL7107 V+
to GND
6V
温度范围
0℃ to 70℃
ICL7107 V-
to GND
-9V
热
电
阻
PDIP封装
qJA(℃/W)
50℃
MQFP封装80℃
模拟输入电压V+to V- 最大结温150℃
参考输入电压V+ to V- 最高储存温度范围-65℃to150℃4.课程设计小结
通过这个课题设计,我基本掌握了金属应变片组成的称重传感器的正确使用方法;了解了压力测量仪的工作原理及其在电子天平中的应用。在设计初期,没有一个整体的合理思路,包括要用到些什么器件也比较模糊。在对电子天平进行了详细的了解后,对设计中涉及到的原理有了一定的认识和理解。明确了整体思路以后,就开始着手单元模块的具体设计。这是设计成功的关键环节。在构思好能够实现所需功能的电路模块后,要根据课题要求,认真计算相关参数,根据实用性和经济性原则,选择抗干扰能力强,工作效率高,经济实惠的元器件来实现电路设计。其中传感器,运算放大器和A/D转换器以及LED显示器的选择是很关键的,要从众多同类芯片中筛选出经济实用的型号器件来是个破费力气但很必要的一个过程。
根据具体的设计要求,结合实际的使用环境,通过查阅相关资料,选择合适并且经济的元器件,计算相关参数,设计单元电路等环节,一步一步向设计课题接近,这期间遇到了许多实际问题,都是在理论学习中接触不到的,通过对这些问题的认识和解决,我学到了许多知识技能,提高了自己的动手能力,分析问题、解决问题的能力以及对各元器件的的选择筛选能力。
悬臂梁式传感器的简易测试
悬臂梁式传感器的简易测试 .38. 本溪钢铁公司 今年,本公司两台动态轨道衡进行大修, 其审的ZTA一20t悬臂梁式传感器也需要检 定.公司自备有EEG一30型标准测力机,却 没有配套的专用装置对传感器进行检测联 系外单位,因无专用底座,检定也无法进行 在这种情况下,经过研究,我们采取了两 只传感器背靠背紧固成一体送测力机测试的 办法{见下图J.由于两只传感器互为底座, 就不再霈要另怍专用固定装置了.测力机施 加负荷时,两只传感器压头受到的力大小相 等.方向相反,所以,只要使用两块标准指示 仪表,就可以同时完成两只传感器负.一特性 的拉定由于当时只有一块表,我们只好用 把加,减负荷次数加倍的办珐逐个进行检 定 悬臂粱式传缩器衙岛覆I试图 1一压头2一铡力机压盘3一限位套 4一疆丝5一传感器6一螺桂7一电缆 具体实施时,要作好以下几项工作: ①在测力机下,上压盘上各加装一个限 位套.以保持传感器压头在测试过程中不产 q:滑移限位套与压盘,限位套与压头之间 哆TH7J5
均采用间隙配合,上限位套与压盘问加顶丝定位. ②用高强度螺栓将两只传感器连结紧固在 一 起.操作过程中要注意,两压头要保持在同 一 中心线上. ③测力机测试时,需在传感器固定端加装 保护托架或吊架,用于防止不测时发生摔坏传感器,砸坏测力机或其它事故保护架可因地 制宜制作,但不要让其对正常测试中的传感器产生干扰力. 采用上述办法,我们圆满完成了两台轨道 衡的传感器的检定任务,免去了送外检测的操劳与花费,开拓了测力机的业务,同时也保证了大修工期. 由此方法也可以引伸出另一种检测方法 —— 比较法,即:将一只标准传感器与一只被检 传感器紧固在一起,置于适当加力装置中,加, 减负荷,比较两者的输出信号,即可判断被测传感器的性能.在投有标准测力机的情况下,采用比较法检测,不失为上策.测试精度主要取决于标准传感器的精度等级.根据不同的检测目标,选择相应等级的标准传感器,就可以得蓟满意的测量结果. 作者通讯地址:辽宁省丰溴市平山区广裕路 邮政墙码:l17021) ~孥
压力传感器
给煤机称重传感器原理和使用知识 2011-8-23 20:11:00 来源: 称重传感器按转换原理分为电磁力式、光电式、液压式、电容式、磁极变形式、振动式、陀螺仪式、电阴应变式等8类传感器,以电阻应变式使用最广。在称重传感器主要技术指标的基本概念和评价方法上,新旧国标有质的差异。本文介绍称重传感器的工作原理和使用注意事项等知识。 电阻应变式称重传感器是基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。 由此可见,电阻应变片、弹性体和检测电路是电阻应变式称重传感器中不可缺少的几个主要部分。下面就这三方面简要论述称重传感器工作原理。 称重传感器原理图 一、传感器电阻应变片 电阻应变片是把一根电阻丝机械的分布在一块有机材料制成的基底上,即成为一片应变片。他的一个重要参数是灵敏系数K。我们来介绍一下它的意义。 设有一个金属电阻丝,其长度为L,横截面是半径为r的圆形,其面积记作S,其电阻率记作ρ,这种材料的泊松系数是μ。当这根电阻丝未受外力作用时,它的电阻值为R: R = ρL/S(Ω) (2—1) 当他的两端受F力作用时,将会伸长,也就是说产生变形。设其伸长ΔL,其横截面积则缩小,即它的截面圆半径减少Δr。此外,还可用实验证明,此金属电阻丝在变形后,电阻率也会有所改变,记作Δρ。 对式(2--1)求全微分,即求出电阻丝伸长后,他的电阻值改变了多少。我们有: ΔR = ΔρL/S + ΔLρ/S –ΔSρL/S2 (2—2) 用式(2--1)去除式(2--2)得到 ΔR/R = Δρ/ρ + ΔL/L –ΔS/S (2—3) 另外,我们知道导线的横截面积S = πr2,则Δs = 2πr*Δr,所以 ΔS/S = 2Δr/r (2—4) 从材料力学我们知道 Δr/r = -μΔL/L (2—5)
悬臂梁地振动模态实验报告材料
实验 等截面悬臂梁模态测试实验 一、 实验目的 1. 熟悉模态分析原理; 2. 掌握悬臂梁的测试过程。 二、 实验原理 1. 模态分析基本原理 理论上,连续弹性体梁有无限多个自由度,因此需要无限多个连续模型才能描述,但是在实际操作中可以将连续弹性体梁分为n 个集中质量来研究。简化之后的模型中有n 个集中质量,一般就有n 个自由度,系统的运动方程是n 个二阶互相耦合(联立)的常微分方程。这就是说梁可以用一种“模态模型”来描述其动态响应。 模态分析的实质,是一种坐标转换。其目的在于把原在物理坐标系统中描述的响应向量,放到所谓“模态坐标系统”中来描述。这一坐标系统的每一个基向量恰是振动系统的一个特征向量。也就是说在这个坐标下,振动方程是一组互无耦合的方程,分别描述振动系统的各阶振动形式,每个坐标均可单独求解,得到系统的某阶结构参数。 多次锤击各点,通过仪器记录传感器与力锤的信号,计算得到第i个激励点与定响应点(例如点2)之间的传递函数 ω ,从而得到频率响应函数矩阵中的一行 频响函数的任一行包含所有模态参数,而该行的r 阶模态的频响函数 的比值,即为r 阶模态的振型。 2. 激励方法 为进行模态分析,首先要测得激振力及相应的响应信号,进行传递函数分析。传递函数分析实质上就是机械导纳,i 和j 两点之间的传递函数表示 [] ∑==N r iN r i r i r H H H 1 21 ... [] Nr r r N r r r r ir k c j m ???ωω? (2112) ∑ =++-=[]{}[] T r ir N r r iN i i Y H H H ??∑==1 21 ...
压阻式称重传感器设计
压阻式电子称传感器的设计 【摘要】:电阻应变式传感器是基于导体或半导体的应变电阻效应,将测量物体形变转化成电阻变化的传感器。通常由两部分组成,即弹性敏感元件和应变计(丝)。弹性敏感元件在被测物理量的作用下,产生一个与被测量成确定函数关系的应变,再用应变计(丝)作为转换元件将应变转换为电阻变化,从而产生感应电压,再通过测量电路转化为信号形式输出【关键字】:应变片直流电桥温度补偿差动放大零点漂移 一.半导体的压阻效应 固体收到作用力后,电阻率就要发生变化,这种效应称为压阻效应。半导体材料的压阻效应特别强,即半导体材料在某一轴向受外力作用时,其电阻率发生的变化较大。 1.半导体压阻效应原理 半导体应变片是用半导体材料制成的一种纯电阻性元件,其工作原理基于半导体材料的压阻效应。 半导体应变片受轴向力作用时,其电阻相对变化为 (1) 式中,为半导体应变片的电阻率的相对变化量。其值与半导体敏感元件在轴向受的应变力关系为 (2) 式中,为半导体的压阻系数,它与半导体材料种类及应力方向与晶轴方向之间的夹角有关;E 为半导体材料的弹性模量,与晶向有关。 将试(2)代入式(1)中,得 (3) 实验证明,对半导体材料,比大上百倍,所以()可以忽略,因此 (4) 2.半导体应变片的灵敏度系数 半导体材料的电阻值变化主要是由电阻率变化引起的,而电阻率的变化是由应变引起的。所以,半导体应变片的灵敏度系数为 (5) 半导体应变片的突出优点是灵敏度高,比金属丝高50~80倍,尺寸小,横向效应小,动态响应好。但它的温度系数大、应变时非线性现象比较严重等缺点。 二.传感器各元器件的选择 电阻应变称重传感器选用等强度梁做弹性元件,使贴片位置不受限制,结构也简单;了提高系统灵敏度,选用膜片式半导体应变片做转换元件;测量电路为恒流源供电电桥,温度补偿电路。 1.应变片的选择 按照结构划分,压阻式传感器主演由三种不同类型,即体型半导体、薄膜型半导体和扩散性半导体。 1)体型半导体应变片 体型半导体应变片是一种将半导体材料硅或锗晶体按照一定法相切割成片状小条,经腐蚀压焊粘贴在基片上而成的应变片,其结构如图 2)薄膜型半导体应变片 薄膜型半导体应变片是利用真空沉淀技术,将半导体材料沉淀在带有绝缘层的试件上而制成,其结构如图
微纳悬臂梁力学传感器弯曲振动模式的光学测量
微纳悬臂梁力学传感器弯曲振动模式的光学测量微纳悬臂梁机械振子体积小质量低是检测微小环境变化的良好传感器,是包括原子力显微镜和磁力显微镜在内很多扫描探针显微镜的核心器件。自从原子力显微镜发明以来,微纳悬臂梁机械振子在基础研究和应用方面都取得了巨大的进展。在磁共振力显微镜的研究中,微纳悬臂梁也是一个重要的组成部分,用于跨学科的研究,如有关分子吸附和纳米机电系统的生物物理学。最近的一些发展表明利用微纳悬臂梁弯曲的多个振动模式参与传感过程,可以获得更多环境检测能力和灵敏度,如质量谱成像和两维矢量力场的实验探测。 其中关于微纳悬臂梁测量的一个挑战是测量和确定其弯曲振动模式。在弯曲振动模式的参数中,振动方向,即机械振子振动方向相对光轴或测量方向的角度,是影响整个测量系统后续分析的重要因素之一。矢量力显微是一种特别适合表征样品形貌以及微小探针-样品间力信号的普适技术,通过监测在扫描样品表面时振动模式的频率改变和振动方向可以得到二维矢量力场图以此提供更多的信息。针对研制的微透镜光纤干涉仪,分析了微纳悬臂梁机械振子光学测量中光干涉和光散射两种物理效应。 研究分为以下三个部分:1.我们发现,结合光在光纤端面和悬臂梁上两个反射所形成干涉效应和光在微纳悬臂梁上的背向散射效应,可以实现对微纳悬臂梁在聚焦光平面内和聚焦光平面外的位移测量。特别的,对于微纳悬臂梁聚焦光平面内的位移测量,我们研制的微透镜光纤干涉仪与传统的光散射仪器相比,不需要四象限光电探测器,极大的降低了光路复杂性,需要准直的光学器件由3个降为2个,便于其应用于极低温系统中。2.理论分析了使用微透镜光纤干涉仪测量机械振子任意方向振动最佳工作点的优化,并通过实验测量沿不同方向振动的悬臂梁,证实了我们的分析。基于以上研究结果,我们测量了两个微米线悬臂梁的热振动,分析其振动方向。 我们的研究结果为机械振子弯曲振动模式提供了新的实验研究手段,为其在矢量力测量中的应用夯实了基础。3.提出了一个实验确定微纳悬臂梁弯曲振动模式振动方向的方法。该方法不需要对微纳悬臂梁有先验知识,也不需要同时测量一对近简并的弯曲振动模式。利用我们的微透镜光纤干涉仪,通过选择不同的工作点,即选择两个不同的振动投影方向,我们实验确定了一个微米线悬臂梁前3
应变式称重传感器)
成绩评定: 传感器技术 课程设计 题目称重传感器 1
目录 摘要 (1) 设计任务书................................ (1) 第一章德普施应变传感器 (2) 1.1工作原理 (2) 1.2 电阻应变片 (2) 第二章测量电路 (2) 2.1测量电桥 (2) 2.2运算放大器LF356 (3) 2.3 放大电路 (3) 2.3.1 一级放大电路 (4) 2.3.2 调零电路 (5) 2.3.3 可调二级放大电路 (5) 第三章误差分析 (6) 第四章个人小结 (6) 参考文献 (6)
摘要 传感器技术是利用各种功能材料实现信息检测的一门综合技术学科,是现今科学领域中实现信息化的基础技术之一。现代测量、控制与自动化技术的飞速发展,特别是电子信息科学的发展,极大的促进了现代传感器的发展。同时我们也看到,传感器在日常生活中的应用越来越广泛,可以说它已成为测试测量不可或缺的环节。因此学习、研究并在实践中不断应用传感器技术具有重大意义。 鉴于此,本次课程设计力图通过对常用传感器的设计运用使我们加深对传感器的认识和理解并逐步将课本上学习到的理论知识转换为实际生产力,以培养我们学以致用的求学质量。 称重传感器是用来将重量信号或压力信号转化为电信号的装置,称重传感器采用金属电阻应变计组成测量桥路,利用金属电阻丝在拉力作用下伸长变细,电阻增加的原理,既金属电阻随所受应变变化而变化的效应而制成的。本次课程设计中的传感器共由以下几部分组 成:应变梁、全桥电路、差动放大电路、调零电路和最后的放大标定电路。 关键词:电阻、放大器、应变片、应变式传感器。 1
悬臂梁压力传感器实验仪等设备主要技术指标
悬臂梁压力传感器实验仪等设备主要技术指标标段1: 悬臂梁压力传感器实验仪(20套) 1、测量原理:悬臂梁结构+惠氏登电桥; 2、量程:0~3.000kg; 3、精度:>=4位有效数字(一位欠准,校正状态); 4、惠氏登电桥工作方式:恒压式; 5、惠氏登电桥灵敏度:2.0±0.2mv/V; 6、电源:工作电压AC220V;20W; 7、配12只的100g砝码; 其他: 1、具备初读数调零功能和满量程校正功能; 2、质保五年(质保期间3个工作日内包换并送货上门)。 分光计(20套) 1、通光口径φ大于30mm; 2、仪器的测角精度为1′; 3、照明灯组采用长寿命高亮度绿发光二极管; 4、质保五年(质保期间3个工作日内包换并送货上门)。 标段2: 传感器系统实验仪(15套) 要求能完成以下实验项目 1、应变片性能——单臂电桥 2、应变片:单臂、半桥、全桥比较 3、应变片的温度将就及补偿 4、热电偶的原理及现象 5、移相器实验 6、相敏检波器实验 7、应变片——交流全桥 8、差动变压器(互感式)的性能 9、差动变压器(互感式)零点残余电压补偿实验 10、差动螺管式(自感式)传感器的静态位移性能 11、霍尔传感器的直流激励静态位移特性 12、霍尔传感器的交流激励静态位移特性实验
13、磁电式传感器的性能 14、压电传感器引线电容对电压放大器的影响、电荷放大器 15、差动面积式电容传感器的静态及动态特性 16、光纤位移传感器静态实验 17、光纤位移传感器动态实验 18、PN结温度传感器测温实验 19、热敏电阻测温演示实验 20、光电传感器(反射型)测转速实验 数字存储示波器(15套) 提供双模拟通道和一个外触发通道,70MHz 带宽,40Kpts 存储深度实时采样率1GSa/s,等效采样率50GSa/s 标段3:CCD多功能实验仪(线阵)(15套) 一、特点 1、采用高精度线阵CCD为实验器件 能够实现对实际物体的高精确尺寸与角度的测量实验。 2、远心照明光源 仪器采用正确的稳压稳流供电方式的远心照明光源,能够对实际物体的尺寸进行在线测量,
用悬臂梁式称重传感器设计一个电子天平
用悬臂梁式称重传感器设计一个电子天平 1.设计思路 本实验采用悬臂梁式称重传感器,所称物体产生的压力由称重传感器检测,并由传感器测量电路转化为相应的模拟电信号输出。称重传感器输出的模拟量,数值一般很小,达不到A/D转换接收的电压范围。所以送A/D转换之前要对其进行前端放大、整形滤波等处理。然后输出信号再经由A/D转换电路转化为相应的数字量。由于本实验采用的ICL7107是3位半双积分型A/D转换器,能直接驱动共阳极LED数码管,故不需要使用单片机进行相应的数据处理和转换,ICL7107将模拟量转换为数字量之后直接将其转化成七段LED显示所需的字型码,输入到相应的信号电极就实现了所称物重数字量的输出。 2.设计方案 将电阻丝应变片粘贴到悬臂梁上合适的位置,并接入全桥测量电路,相对的桥臂受力相同,相邻的桥臂受力相反,其中一对受拉力作用,另一对受压力作用。由于电阻丝在外力作用下发生机械变形时,其电阻值发生变化,从而引起电压发生变化,即电桥的输出电压反映了相应的受力状态。利用电桥传感器测应力的变化,可以间接的测量物体的质量。传感器测出的信号经过放大电路放大处理成为符合A/D输入范围的电信号后进入A/D转换器,最后通过芯片内部电路将转换后的数字量转化为LED可识别的七段字型码送交LED显示器显示。 压力测量仪的原理在该称重系统的设计中有着极大的应用。其大概的原理框图主要由以下五个部分组成:传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等组成。其原理框图如图1所示: 传感器放大系A/D转换显示器 传感器供电电 图1 压力测量仪组成框图 2.1称重式传感器 选择合适的满足要求的传感器是实验成功的关键,本实验选择CZL-1R称重传感器,其量程为3.0Kg,而要求的量程是0 ~ 1.999Kg,可见该传感器的超载能力为:150%,在一定范围内的超载情况下具有保护作用;灵敏度:1mV/V;温度灵敏度漂移:0.002%℃;输入阻抗:405±15Ω,输出阻抗:350±15Ω;激励电压:10V;工作温度范围:-20~+60℃。
应变式称重传感器一般原理
电阻应变式称重传感器2.1 电阻应变式称重传感器等工作原理2.2 称重传感器常用技术参数2.3 称重传感器选用地一般规则2.4 使用称重传感器注意事项2.1 电阻应变式称重传感器等工作原理电阻应变式称重传感器是基于这样一个原理:弹性体<弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面地电阻应变片<转换元件)也随同产生变形,电阻应变片变形后,它地阻值将发生变化<增大或减小),再经相应地测量电路把这一电阻变化转换为电信号<电压或电流),从而完成了将外力变换为电信号地过程.由此可见,电阻应变片、弹性体和检测电路是电阻应变式称重传感器中不可缺少地几个主要部分.下面就这三方面简要论述.一、电阻应变片电阻应变片是把一根电阻丝机械地分布在一块有机材料制成地基底上,即成为一片应变片.他地一个重要参数是灵敏系数K.我们来介绍一下它地意义.设有一个金属电阻丝,其长度为L,横截面是半径为r地圆形,其面积记作S,其电阻率记作ρ,这种材料地泊松系数是μ.当这根电阻丝未受外力作用时,它地电阻值为R:R = ρL/S<Ω)<2—1)当他地两端受F力作用时,将会伸长,也就是说产生变形.设其伸长ΔL,其横截面积则缩小,即它地截面圆半径减少Δr.此外,还可用实验证明,此金属电阻丝在变形后,电阻率也会有所改变,记作Δρ.对式<2--1)求全微分,即求出电阻丝伸长后,他地电阻值改变了多少.我们有:ΔR = ΔρL/S + ΔLρ/S –ΔSρL/S2 <2—2)用式<2--1)去除式<2--2)得到ΔR/R = Δρ/ρ + ΔL/L –ΔS/S <2—3)另外,我们知道导线地横截面积S = πr2,则Δs = 2πr*Δr,所以ΔS/S = 2Δr/r <2—4)从材料力学我们知道Δr/r = -μΔL/L <2—5)其中,负号表示伸长时,半径方向
常用的应变式压力传感器都有哪四类
应变式压力传感器是压力传感器中应用比较多的一种传感器,它一般用于测量较大的压力,广泛应用于测量管道内部压力、内燃机燃气的压力、压差和喷射压力、发动机和导弹试验中的脉动压力,以及各种领域中的流体压力等。 1、膜片式 它的弹性敏感元件为周边固定圆形金属平膜片。膜片受压力变形时,中心处径向应变和切向应变均达到正的最大值,而边缘处径向应变达到负的最大值,切向应变为零。因此常把两个应变片分别贴在正负最大应变处,并接成相邻桥臂的半桥电路以获得较大灵敏度和温度补偿作用。采用圆形箔式应变计(见电阻应变计)则能最大限度地利用膜片的应变效果。这种传感器的非线性较显着。膜片式压力传感器的最新产品是将弹性敏感元件和应变片的作用集于单晶硅膜片一身,即采用集成电路工艺在单晶硅膜片上扩散制作电阻条,并采用周边固定结构制成的固态压力传感器(见压阻式传感器)。 2、应变管式
又称应变筒式。它的弹性敏感元件为一端封闭的薄壁圆筒,其另一端带有法兰与被测系统连接。在筒壁上贴有2片或4片应变片,其中一半贴在实心部分作为温度补偿片,另一半作为测量应变片。当没有压力时4片应变片组成平衡的全桥式电路;当压力作用于内腔时,圆筒变形成“腰鼓形”,使电桥失去平衡,输出与压力成一定关系的电压。这种传感器还可以利用活塞将被测压力转换为力传递到应变筒上或通过垂链形状的膜片传递被测压力。应变管式压力传感器的结构简单、制造方便、适用性强,在火箭弹、炮弹和火炮的动态压力测量方面有广泛应用。 3、应变梁式 测量较小压力时,可采用固定梁或等强度梁的结构。一种方法是用膜片把压力转换为力再通过传力杆传递给应变梁。两端固定梁的最大应变处在梁的两端和中点,应变片就贴在这些地方。这种结构还有其他形式,例如可采用悬梁与膜片或波纹管构成。 4、组合式 在组合式应变压力传感器中,弹性敏感元件可分为感受元件和弹性应变元件。感受元件把压力转换为力传递到弹性应变元件应变最敏感的部位,而应变片则贴在弹性应变元件的最大应变处。实际上较复杂的应变管式和应变梁式都属于这种型式。感受元件有膜片、膜盒、波纹管、波登管等,弹性应变元件有悬臂梁、固定梁、Π形梁、环形梁、薄壁筒等。它们之间可根据不同需要组合成多种型式。应变式压力传感器主要用来测量流动介质动态或静态压力,例如动力管道设备的进出口气体或液体的压力、内燃机管道压力等等。
第2章-力、压力传感器课后习题
力传感器的组成是什么? 答:力传感器主要由力敏感元件、转换元件和测量、显示电路组成。弹性敏感元件的作用是什么?其分类有几种?各有何特点? 答: 作用:弹性敏感元件的作用是把力或压力转换为应变或位移,然后再转换电路将应变或位移转换为电信号。 分类:(1)力转换为应变或位移的变换力的弹性敏感元件 (2)压力转换为应变或位移的变换压力的弹性敏感元件 特点: 变换力的弹性敏感元件 圆柱式:结构简单,可承受较大的载荷,便于加工,实心圆柱形可测量大于10kN的力,空心圆柱形可测量1~10kN的力,且应力变化均匀。圆环式:圆环式的敏感元件比圆柱式输出的位移大,因而具有较高的灵敏度,适用于测量较小的力。 悬臂梁式:它的一端固定,一端自由,结构简单,加工方便,应变和位移较大,适用测量1~5kN的力。 压力的弹性敏感元件 弹簧管:C形弹簧管的一端密封但不固定,成为自由端,另一端连接在管接头上且固定,流体压力通过管接头进入弹簧管后,在压力F作用下,弹簧管的横截面力图变成圆形截面,截面的短轴力图伸长。使弹簧管趋向伸直,一直伸展到管弹力与压力的作用相平衡为止。这样自由端便产生了位移。通过测量位移的大小,比可得到压力的大小。
波纹管:波纹管的轴向在流体压力作用极易变形,有较高的灵敏度。波纹膜片和膜盒:线性度好,灵敏度高及各种误差小。 薄壁圆筒:筒壁均匀受力,并均匀向外扩张,所以在管壁的轴线方向产生拉伸力和应变力。 3、电阻应变式传感器的工作原理是什么?它是如何测量试件的应变的? 答: 工作原理:通过一定的机械装置将被测量转化成弹性元件的变形,然后由电阻应变片将变形转换成电阻的变化,再通过测量电路进一步将电阻的改变转换成电压或电流信号输出。 测试原理:测试时,将应变片用粘接剂牢固的粘贴在被测试件的表面上,随着试件受力变形,应变片的敏感栅也获得同样的变形,从而使其电阻随之发生变化,而此电阻的变化是与试件应变成比例的,因此如果通过一定的测量线路将这种电阻的变化转换为电压或电流变化,然后再用显示记录仪表将其显示记录下来,就能知道被测试件应变量的大小。 4、电阻应变式传感器的测量电路有哪些?各有何特点? 答:
微悬臂梁传感器研究报告
电子科技大学光电信息学院 课程设计论文课程名称传感技术 题目名称微悬臂梁气体传感器研究 学号2705105018 姓名张波 指导老师太惠玲 起止时间2010年5月1日至2010年5月30日 2010年5 月 30日 电子科技大学光电信息学院
课程设计任务书 一、课程名称___ 传感技术_______ ____________ __ 二、课程设计题目_______微悬臂梁气体传感器研究_________________________________ 三、课程设计目的 随着MEMS技术(Micro Electro-Mechanical System)的飞速发展及其在传感器领域的应用,以微悬臂梁为基础构成的生物化学传感器成为传感器领域的一个研究热点与难点。该类型气体传感器的制备与检测涉及材料、半导体工艺与电路等各个学科,因此本课程设计旨在通过对微悬臂梁气体传感器国内外研究现状的考察与分析,充分理解该类型传感器的工作原理,并掌握其制备工艺与测试技术。 四、课程设计要求 本课程设计要求在查阅微悬臂梁气体传感器国内外文献的基础上,掌握该类传感器的传感模式、表面修饰技术、MEMS工艺及检测电路的设计与制备等关键技术,并完成课程设计报告。 五、课程设计任务和内容材料,机理器件。检测电路 (1)理解微悬臂梁气体传感器的敏感机理; (2)学习微悬臂梁气体传感器的表面修饰技术和MEMS制备工艺; (3)学习微悬臂梁气体传感器后端检测电路的设计; (4)完成课程设计报告。 六、参考文献 [1] J. Zhou, P. Li, Zeolite-modified microcantilever gas sensor for indoor air control, Sensors and Actuators B, 2003, 94(3): 337-342 [2] J. Zhou, P. Li, Self-excited piezoelectric mocrocantilever for gas detection, Microelectronic Engineering, 2003, 69(1): 37-46 [3] G. Zuo, X. X. Li, P. Li, Trace TNT vapor detection with an SAM function piezoresistive SiO2 microcantilever, Ananlytica Chemical Acta, 2006, 580: 123-127 [4] D. Ying, G. Wei, Y. Zheng, Thermally-excited MEMS cantilever resonator for gas sensing, Nanotechnology and Precision Engineering, 2009, 7(2): 119-122 指导教师签名:太惠玲日期: 2010 年4月 13日
微悬臂梁生物传感器及其在生物医学领域的应用
万方数据
?99? tions.Biomohcularinteractions,whencombinedwithamicrocantileverplatformwhichisbasedonMEMStechnology。canpro-duceanextremelypowerfulbiosensingdesign.Hereweintroducetheworkingprinciple.read—OUttechnologyofthecantile-VeT.Thentheirapplicationsinthebiomedicalfieldwerepresented. KEYWORDS:Biosensor;MEMS;microcantilever;read--outtechnology 近年来.微悬臂粱传感器由于潜在的可以作为发展各种物理、化学、生物传感器的平台而备受人们重视。微悬臂粟就像一个缩小的微型跳板锚定在一端质量相对较大的物体上。微悬臂梁结构应用于传感器已有多年,微梁最早是用于微力检测的传感器【”。微悬臂粱传感器是最简单的微结构。利用它可以探测到极小的位移或质量的变化,这使得微悬臂梁成为高精度离灵敏传感器的理想选择。可以通过传统约徼加工技术进行批量生产。 l徽悬臂梁生物传敷器工作原理 微悬臂梁可以通过包括周围热运动(布朗运动)在内的不同方法产生谐振,微悬臂梁的谐振频率可以随着分子的吸附面灵敏韵改变。】ll:井,微悬臂粱也可以由于分子的吸附而弯曲。下面我们分别对悬臂梁的谐振频率的变化和悬臂粱的弯曲进行探讨。 1.1谐振频率变化的探讨[2]微悬臂梁吸附待测物引起质量变化,从而导致微悬臂粱谐振频率偏移,通过测量频率偏移量的大小,就可以反映出微悬臂梁吸附待测物的多少.它的精度可以达到10~lSg。 1.2吸附作用导致悬臂梁偏转的探讨如果把待检测的分子吸附在微悬臂梁的一个表面,而另外一个表面不吸附待测分子.由于分子之间的相互作用会在微悬臂梁上下表面引起应力差。从而导致微悬臂梁弯曲。其弯曲直接成比例的由吸附中所产生的不同表面应力所产生。表面应力的单位是N/m或者J/m2,我们可以观测到悬臂粱上生物分子在十分之一mJ/m2范围之内表面应力的变化。 2徽粱的读出技术 微悬臂梁传感器的一个重要组成部分是一套能够将微悬臂粱的有关变化实时输出的读出系统。微悬臂梁的读出方法主要有光学方法和电学方法两类。其中光学方法常用的是光束偏转法‘”、激光干涉法[”,电学方法包括压阻法【“、压电法[5】和电容【5】等。 2.1光学方法光束偏转法的测量原理是激光二极管发出的激光束打在悬臂梁的自由端,以自由端上的金属层作为反射镜。将人射的激光反射出去,通过光电探测器接收反射光。光电探测器输出的电信号通过信号处理电路计算出入射在光电探溅器上光束的位置.从而可以反映徼悬臂梁的弯蓝变化。 光干涉法的原理是使原光纤光束和从悬臂梁背面从悬臂梁背面反射的光发生干涉。通过精确控制从悬臂梁背面反射的光,干涉条纹的改变即反映了悬臂梁的弯曲情况。2,2电学方法压阻检测是乖j用压阻材瓣的压阻效应,测量应力和电阻值的变化关系,尤其适用于微弱信号的检测和放大。压电检测利用压电效应,在悬臂梁表面淀积压电材料(通常是Z“)),当悬臂梁弯曲时,在压电层就会产生感应电荷,感应电荷的多少就反映了悬臂梁的弯曲程度.电容检测法是利用悬臂梁的作为平行板电容器的1个或2个极板.悬臂梁弯曲时,极板间距就改变,将悬臂梁作为可动的平行板,则悬臂梁弯曲的变化就可以通过电容的变化来表征. 3在生物医学领域的应用 徽悬臂梁传感器自从同世以来,以其体积小、成本低、灵敏度高等优点,在生物医学检测领域获得了广泛的研究和应用。20世纪90年代以来,硅微加工技术的发展使微悬臂梁的制造得以实现,加上先进读出技术的发展,促使微悬臂梁得到广泛应用。下面介绍一个具有代表性的试验。 限稍性内切酶试验嘲;馓悬臂梁常被用来作为生化反应的传感器平台。两个酶发生反应:被固定的DNA(DNAl,以酶切酶切位点)先与一种限制性内切酶消化,然后和荧光索标记的互补DNA序列(DNA2)酶法结扎(图1)。这种生化反应的参数所需的是共价键.而不是硫基.被固定的双链DNA序列含有切位点。酶切缓冲器包含b一硫基乙醇或者二硫苏糖醇作为还原剂。如上所述,这些小的硫醇会耗光悬臂梁金表面的硫醇化的DNA。为了限制试验,悬臂粱上固定包含5哄价氨基酸组的低聚物。硅悬臂梁表面首先涂上浓度为2%的3一氨基丙基杂氮硅三环溶液,然后在浓度为1%的戊二醛溶液中培养1h.在磷酸盐缓冲液冲洗,并浸泡包含10mM氢氧化钾浓度为lmg?n1L_1的DNAl溶液中24h。在酶切反应缓冲液中清洗功能化的悬臂梁。戊二醛使表面硅烷的氨基组与DNAl低聚物的5’氨基酸组交联,产生一个共价固定的DNAl。 图】锾悬臂梁表面上限镧性消化/结扎反应的结构 共价固定的DNAl与HindⅢ内切酶进行消化反应.使DNAl的束端可以进行牯性反应.荧光标记的DNA2与DNAl末端进行互补反应,然后与DNA2结扎. 4结束语 基于硅的微机电制造工艺,结合高灵敏度的原子力显徼镜,这种微悬臂梁传感器技术对于需要更经济的检测物质的 多种性质发挥了革命性的作用。将来的开发工作重点在于 万方数据
第2章力、压力传感器课后习题
力传感器的组成是什么 答:力传感器主要由力敏感元件、转换元件和测量、显示电路组成。弹性敏感元件的作用是什么其分类有几种各有何特点 答: 作用:弹性敏感元件的作用是把力或压力转换为应变或位移,然后再转换电路将应变或位移转换为电信号。 分类:(1)力转换为应变或位移的变换力的弹性敏感元件 (2)压力转换为应变或位移的变换压力的弹性敏感元件 特点: 变换力的弹性敏感元件 圆柱式:结构简单,可承受较大的载荷,便于加工,实心圆柱形可测量大于10kN的力,空心圆柱形可测量1~10kN的力,且应力变化均匀。圆环式:圆环式的敏感元件比圆柱式输出的位移大,因而具有较高的灵敏度,适用于测量较小的力。 悬臂梁式:它的一端固定,一端自由,结构简单,加工方便,应变和位移较大,适用测量1~5kN的力。 压力的弹性敏感元件 弹簧管:C形弹簧管的一端密封但不固定,成为自由端,另一端连接在管接头上且固定,流体压力通过管接头进入弹簧管后,在压力F作用下,弹簧管的横截面力图变成圆形截面,截面的短轴力图伸长。使弹簧管趋向伸直,一直伸展到管弹力与压力的作用相平衡为止。这样自由端便产生了位移。通过测量位移的大小,比可得到压力的大小。
波纹管:波纹管的轴向在流体压力作用极易变形,有较高的灵敏度。波纹膜片和膜盒:线性度好,灵敏度高及各种误差小。 薄壁圆筒:筒壁均匀受力,并均匀向外扩张,所以在管壁的轴线方向产生拉伸力和应变力。 3、电阻应变式传感器的工作原理是什么它是如何测量试件的应变的答: 工作原理:通过一定的机械装置将被测量转化成弹性元件的变形,然后由电阻应变片将变形转换成电阻的变化,再通过测量电路进一步将电阻的改变转换成电压或电流信号输出。 测试原理:测试时,将应变片用粘接剂牢固的粘贴在被测试件的表面上,随着试件受力变形,应变片的敏感栅也获得同样的变形,从而使其电阻随之发生变化,而此电阻的变化是与试件应变成比例的,因此如果通过一定的测量线路将这种电阻的变化转换为电压或电流变化,然后再用显示记录仪表将其显示记录下来,就能知道被测试件应变量的大小。 4、电阻应变式传感器的测量电路有哪些各有何特点 答: 恒压源供电的直流电桥 特点:当被测量无变化时,电桥平衡,输出为零。当测量发生变化时,电桥平衡被打破,有电压输出,输出的电压与被测量的变化成比例。恒流源供电的直流电桥 特点:当桥臂电阻发生变化时,电桥有输出,输出大小与桥臂电阻变
称重传感器原理
1.2 称重传感器 系统采用悬臂梁式称重传感器。该传感器量程30kg;弹性体为弯曲悬臂梁结构,外形高度低,结构强度高;用于拉伸力或压缩力测量,抗偏、抗侧向力强;防尘密封,精度高,性能稳定可靠,安装使用方便。传感器外形如图2所示,单位:mm。 此传感器为电阻应变式称重传感器,它的主要组成部分有电阻应变片、弹性体和检测电路。工作原理:弹性体在外力作用下产生弹性变形,使粘贴在其表面的电阻应变片也随之产生变形,电阻应变片变形后,它的阻值将发生变化,再经相应的测量电路把这一电阻变化转换为电压,从而完成将外力变换为电信号的过程。其中,电阻应变片是把一根电阻丝机械地分布在一块有机材料制成的基底上,即成为一片应变片;弹性体是一个有特殊形状的结构件,它的功能有两个:首先是它承受称重传感器所受的外力,对外力产生反作用力,达到相对静平衡;其次,它要产生一个高品质的应变场,使粘贴在此区的电阻应变片比较理想地完成应变电信号的转换任务;检测电路采用全桥式等臂电桥把电阻应变片的电阻变化转变为电压输出。1.3 高精度A/D转换 称重传感器的输出为mV级的微弱信号,传统的测量方法是在A/D转换之前加一级高精度的放大器,电路复杂。AD7714是美国Analog Devices(AD)公司推出的24-位ADC家族AD771X 系列中的新品,适用于低频、高精度工业级转换。该器件具有完整的模拟前端,可以直接测量传感器输出的直流微弱信号,转换精度达到24位无误码。采用三线串行口与微控制器连接,通过软件编程可以对增益、信号极性、输入通道作出设置。该芯片具有自校准、系统校准和背景校准功能,可以消除零点误差、满量程误差及温度漂移的影响。
双孔悬臂梁式称重传感器是电子计价秤中广泛使用的传感.
双孔悬壁梁式称重传感器偏载误差分析 □ 孟淑燕 双孔悬臂梁式称重传感器是电子计价秤中广泛使用的传感器。这种传感器的弹性体具有上下两个平行梁。它的最大特点就是具有抗偏载的力学特性。也就是说,弹性体的应变量ε只取决于作用在弹性体平面内且与轴线相垂直的力分量,而与其他分量无关。 (a) (b)图2 (a) 图1双孔悬臂梁式传感器的秤重结构示意图 图3 (b) 见图1,为了便于分析,将质量为m的物体放在承重盘的任意位置上。设m所受的重力为P;O点为承重盘理想的中心位置;重力P在承重盘上的作用点到x轴的距离为e,到z轴的距离为s。 应用理论力学力的平移定理可先将力P沿z轴方向平移至x轴上,同时,在yz平面产生一个附加力偶,力偶矩为Mn(Mn=P?e)。再将力P平移至O点,则在xy平面内产生一个附加力偶,力偶矩为M(M=P?s)。可以认为:这样两次平移的结果,力P、力偶矩Mn、M对传感器的共同作用与物体m在任意位置时所受重力P对传感器的作用等效。 为了分析弹性体结构的抗偏载特性,下面分别分析力P在理想位置及在x方向或z方向偏移时,弹性体的受力情况。1力P作用在理想位置 在图1所示的结构中,可以把弹性体看作是上、下对称的平行梁式结构,该结构属于3次超静定问题。即此结构上的未知约束反力的数目比能列出的独立静力平衡方程的数目多三个。 由理论力学可知:“限制物体某些运动的条件称为约束”。物体与约束之间相互作用着力,约束给物体的力限制物体的某些运动。“约束给被约束物体的力称为约
束反力”。例如单悬臂梁结构见图2(a),其一端固定,另一端为自由端。当自由端作用力P时,固定端约束该梁在水平、垂直方向的移动及相对转动。固定端给横梁的约束用约束反力X、Y、M′表示。如图2(b)所示。取坐标系x0y,此力系为平面一般力系,能列三个独立平衡方程来求解三个约束反力。即:Σx=0X=0 Σy=0Y-P=0,Y=P ΣM0=0M′-PL=0,M′=PL此结构为静定结构。 根据上面分析,我们可将图1的结构简化为图3(a)所示的计算简图。在上、下梁的固定端作用六个约束反力,它们分别是: X1、Y1、M1(作用在上梁)X2、Y2、M2(作用在下梁) 此力系仍是平面一般力系,仅用静力平衡方程只能解出三个约束反力,其余三个约束反力需用材料力学办法才能求解。求解过程较复杂(略),我们只引用其结论,在力P单独作用下,当t1/t2很小时,有: PLX1=X2H为上下梁的高度)P Y1=Y2=M1=M2=PL 载荷P及约束反力均为作用在梁上的外力,要讨论梁的变形须分析作用在梁上各横截面上的内力。由于此结构上下对称,且结构参数均相同,所受外力也相同,我们只研究上梁任一横截面上的内力。用材料力学的分析方法,为显示出截面上的内力,沿面nn假想地把梁分成两部分,并以左段为研究对象。如图3(b)所示。由于原来的梁处于平衡状态,所以梁的左段仍应处于平衡状态。作用于左段上的力,除外力X1、Y1、M1外,在截面nn上还有右段对它的作用内力,把这些内力、外力分别投影于x轴、y轴上,其总和应等于零。 由Σx=0,得: N-X1=0N=X1(横截面nn上的轴力)由Σy=0,得: Y1-Q=0Q=Y1(横截面nn上的剪力) 若把左段上的所有外力和内力对截面nn的形心O取矩,其力矩总和应等于零。一般说,这就要求在截面nn上有一个内力偶矩M,由ΣM0=0得: 《》 21 Y1x-M1-M=0
压力传感器特性的研究
实验2压力传感器特性的研究 压力传感器是利用应变电阻效应,将力学量转换成易于测量的电压量的器件。压力传 感器是最基本的传感器之一,主要用在各种电子秤、应力分析仪等仪器上。传感器的种类 很多,应用极为广泛。根据要求精度和使用方式不同,可选用不同型号的压力传感器。 一、 实验目的 1. 了解压力传感器的工作原理。 2. 研究压力传感器的静态特性。 3. 了解电位差计的工作原理,熟悉其使用方法。 二、 实验仪器 压力传感器、电位差计、稳压电源、电压表、砝码等。 三、实验原理 本实验所用的传感器,是由四片电阻应变片组成,分别粘贴在弹性体的平行梁上、下 两表面上。四个应变片组成电桥,采用 非平衡电桥原理,把压力转化成不平衡 电压进行测量。下面我们从三个方面对 压力传感器进行讨论。 1. 应变与压力的关系 电阻应变片是将机械应变转换为电 阻阻值的变化。将电阻应变片粘贴在悬 臂梁式弹性体上。常见的悬臂梁形式有 等截面梁、等强度悬臂梁、带副梁的悬 臂梁以及双孔,单孔悬臂梁。 图2-1是等截面梁结构示意图,弹 性体是一端固定,截面积 S 处处相等的等截面悬臂梁(S= bh ,宽度为b ,厚度为h ),在距 载荷F 着力点L o 的上下表面,顺 L 方向粘贴有受拉应变片 R 1、R 3和受压的艮、R 4应变片, 粘贴应变片处的应变为 6FL o 2 bh 2 Y Y 是弹性体的弹性模量。从式(2-1)可看出,除压力 F 夕卜, 图2-1等截面梁结构示意图 (2-1) 式中f 是应变片处的应力, — ------- L
R l R l U S R I R i R 2 R 2 R 4 R 4 R 3 R 3 R 4 R 4 U S (2-2) 右 R l =R 2= R 3= R 4 和厶 R l = △ R 2= △ R 3= △ R 4,则有 R R I 2R 由上式可知,电压 U 与电阻值的变化成 正比。由此可看出差动电桥既没有非线性误 差,又具有较高的灵敏度,同时还具有适应 温度变化的补偿能力等优点。实验中,电桥 的不平衡电压 U 可由电位差计测出。 3.压力传感器的静态特性 压力传感器的基本特性分为静态特性 和动态特性两种。所谓静态特性是指输入不 随时间而变化的特性,即在静载荷(力值) 作用下,用实验的方法求得输入的力与传感 器输出电压(示值)之间的关系(线性关系), 即U=a+bF 由输入和输出的关系, 就可研究其 静态特性。 1 ?灵敏度S 传感器在静态工作条件下,其单位压力所产生的输出电压,称为静态灵敏度。在通常 意义上,如指一台传感器灵敏度高,也指其分辨率高。用公式表示如下: dU dF (2-4) 这实际上就是传感器输入输出特性曲线上某点的斜率。非线性传感器各处的灵敏度是 不相同的,对于线性传感器灵敏度则为: u U 。 F F o (2-5) 图2-3所示为上述两种情况下灵敏度的图解表示,其中左图为非线性灵敏度,右图为 2. 电阻的变化与电压的关系 由于弹性体的应变发生了变化,粘贴在其上的电阻应变片的电阻值也随之发生变化, 受拉的电阻应变片电阻值增加,而受压的电阻应变片电阻值减少,把四个电阻应变片组成 一个电桥,这便成为差动电桥,如图 2-2所示。此时电桥的输出电压 U 为: S