步进送料机课程设计
设计任务书
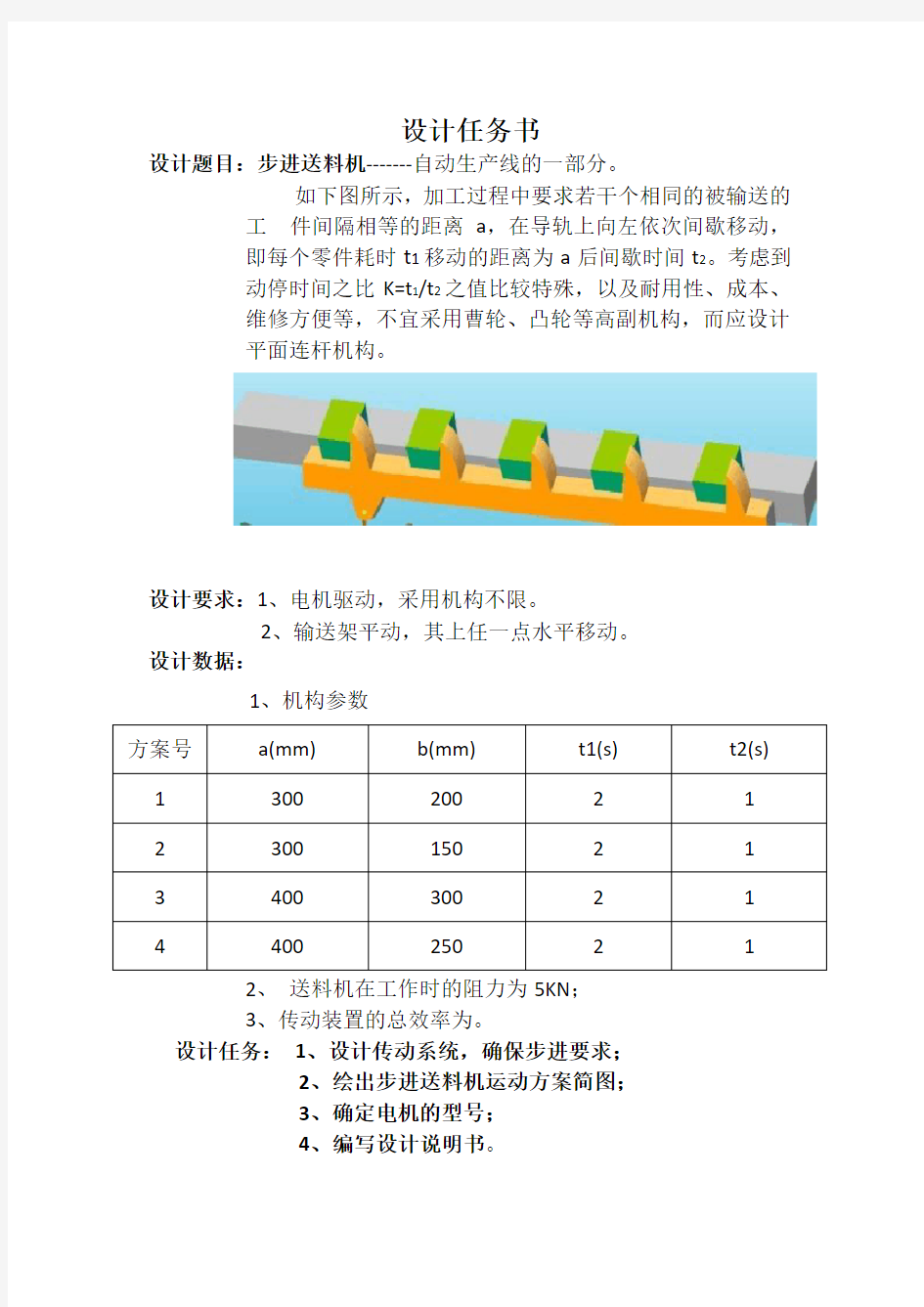
设计题目:步进送料机-------自动生产线的一部分。
如下图所示,加工过程中要求若干个相同的被输送的工件间隔相等的距离a,在导轨上向左依次间歇移动,
即每个零件耗时t1移动的距离为a后间歇时间t2。考虑到
动停时间之比K=t1/t2之值比较特殊,以及耐用性、成本、
维修方便等,不宜采用曹轮、凸轮等高副机构,而应设计
平面连杆机构。
设计要求:1、电机驱动,采用机构不限。
2、输送架平动,其上任一点水平移动。
设计数据:
1、机构参数
方案号a(mm)b(mm)t1(s)t2(s) 130020021 230015021 340030021 440025021
2、送料机在工作时的阻力为5KN;
3、传动装置的总效率为。
设计任务:1、设计传动系统,确保步进要求;
2、绘出步进送料机运动方案简图;
3、确定电机的型号;
4、编写设计说明书。
目录
一、前言 ..................................................................................... - 3 -
二、机构设计原理...................................................................... - 4 -
三、四杆机构设计方案(给定行程速比系数K=t1/t2) .............. - 5 -
四、四杆机构设计步骤............................................................ - 6 -
五、电动机类型选择................................................................ - 8 -
六、减速器类型选择.................................................................. - 9 -
七、确定电动机型号................................................................ - 10 -
八、课程设计总结.................................................................... - 10 -
九、参考文献 ........................................................................... - 10 -
一、前言
进入21世纪以来,随着科学技术、工业生产水平的不断发展和人们生活条件的不断改善市场愈加需要各种各样性能优良、质量可靠、价格低廉、效率高、能耗低的机械产品,而决定产品性能、质量、水平、市场竞争能力和经济效益的重要环节是产品设计。机械产品设计中,首要任务是进行机械运动方案的设计和构思、各种传动机构和执行机构的选用和创新设计。这要求设计者综合应用各类典型机构的结构组成、运动原理、工作特点、设计方法及其在系统中的作用等知识,根据使用要求和功能分析,选择合理的工艺动作过程,选用或创新机构型式并巧妙地组合成新的机械运动方案,从而设计出结构简单、制造方便、性能优良、工作可靠、实用性强的机械产品。
企业为了赢得市场,必须不断开发符合市场需求的产品。新产品的设计与制造,其中设计是产品开发的第一步,是决定产品的性能、质量、水平、市场竞争力和经济效益的最主要因素.机械原理课程设计结合一种简单机器进行机器功能分析、工艺动作过程确定、执行机构选择、机械运动方案评定、机构尺度综合、机构运动方案设计等,使学生进一步巩固、掌握并初步运用机械原理的知识和理论,对分析、运算、绘图、文字表达及技术资料查询等诸方面的独立工作能力进行初步的训练,培养理论与实际结合的能力,更为重要的是培养开发和创新能力。因此,机械原理课程设计在机械类专业学生的知识体系训练中,具有不可替代的重要作用。
本次我设计的是步进送料机,以小见大,设计并不是门简单的课程,它需要我们理性的思维和丰富的空间想象能力。我们可以通过对步进送料机的设计进一步了解机械原理课程设计的流程,为我们今后的设计课程奠定了基础。
二、机构设计原理
1、在平面运动副中,两构件之间的直接接触有三种情况:点接触、线接触、和面接触。按照接触特性,通常把运动副分为低副和高副两类。低副是通过面接触而构成的运动副,故其接触处的压强小,承载能力大,耐磨损,寿命长,并且形状简单,容易制造。低副的两构件之间只能做相对滑动;而高副的两构件之间则可做相对滑动或滚动,或两者并存。低副中的移动副约束了沿一个轴方向的移动和绕某点的转动的两个自由度只保留沿另一个轴方向的一个自由度;回转副约束了沿两个轴方向移动的两个自由度,只保留一个转动的自由度。所以这里我们选择低副。
2、在低副中的铰链四杆机构又分为三种基本形式:曲柄摇杆机构、双曲柄摇杆机构和双摇杆机构。其中曲柄摇杆机构具有“急回运动”的特性——摇杆来回摆动的摆角相同,但对应的曲柄转角却不相同;当曲柄匀速转动时,对应的时间也不相同,这反映了摇杆往复摆动的快慢不同,这表明摇杆具有急回运动的特性。牛头刨床、往复式运输机等机械利用这种急回特性可以缩短非生产时间,提高生产率。所以我们选择曲柄摇杆机构。所以这里我么也是利用急回特性。
三、四杆机构设计方案(给定行程速比系数K=t1/t2)
图一
1、算出极位夹角θ=180°(K-1)/(K+1)
2、任选一点D,做两个极限位置C1D和C2D,其间夹角等于ψ
3、连接直线C1C2,作∠C1C2O=∠C2C1O=90°-θ,得OC1与OC2的交点O。这样得∠C1OC2=2θ。由于同弦上圆周角为圆心角的一半,以O 为圆心、OC1为半径做圆L,则该圆上任意点A与C1和C2连线的夹角∠C1AC2=θ。从传动上看,点A位置须受传动角的限制。欲使其有确定的解,可添加附加条件。
4、当A点位置确定后,连接AC1和AC2,可测量出AC1和AC2的
长度,再根据极限位置时曲柄和连杆共线的原理,得
AC1=b-a
AC2=b+a
a、b分别别为曲柄和连杆的长度,解方程得:
a=(AC2-AC1)/2
b=(AC2+AC1)/2
连线AD的长度即为机架的长度d
四、四杆机构设计步骤
1、由已知得:a=300mm b=200mm t1=2s t2=1s所以得:K=t1/t2=2 θ=180°(K-1)/(K+1)=60°
2、用作图法设计如下图:
图二
3、作直线C1C2,作∠C1C2O=∠C2C1O=30°,得OC1与OC2的交点O,以O点为圆心OC1为半径做圆O,圆O上选取一点A,连接AC1、AC2,在CO延长线上选取一点D,连接DC1、DC2并延长,以D为圆心DC1为半径做圆交DO延长线于C点
4、设计要求步进料距离为300mm,由各铰链之间的几何关系知C1C2=200mm,由图测量得AC1=,AC2=,所以
AB=(AC2-AC1)/2=
BC=(AC2+AC1)/2=
5、以A点为圆心AB为半径做圆A,连接BC=
6、将长度圆整后得:
AB=73mm BC=154mm CD=181mm AD=134mm DF=227
7、使用圆整后的数据作图如下:
图三
8、判断四杆机构是否符合条件
由图知:Lmin=AB=73mm Lmax=CD=181mm
L2=AD=134mm L3=BC=154mm
满足条件:Lmin+Lmax 总体来讲,该传动方案满足性能要求,适应工作条件、工作 可靠,此外还结构简单、尺寸紧凑、成本低、传动效率高。 五、电动机类型选择 1、电动机是一种标准系列产品,使用时只需合理选择其类型参数即可。 2、电动机主要分为Y型、YZ型、YZR型,其中YZ型、YZR型主要用于冶金、起重等;YZR系列绕线转子三相异步电动机具有良好的密封性、效率高、过载能力强、结构可靠、外形美观、维护方便、使用安全等特点。广泛应用于矿山、冶金、机械工业、轻纺化工及粉尘多环境较为恶劣的场合。Y型系列三相异步电动机一般具有防止灰尘、铁屑或其他杂物侵入电动机内部的特点。适用于无特殊要求的机械上,如机床、泵、风机、运输机、搅拌机、农业机械、送料机等。由于交流异步电动机结构简单、成本低、工作稳定可靠、容易维护、且交流电源易获得,故是机械设备最常用的原动机。所以根据电动机的特性我们选择Y系列三相异步电动机。 3、Y系列三相异步电动机根据转速又有3000r/min,1500r/min,1000r/min,750r/min四种转速。可根据实际需要 选择。 六、减速器类型选择 1、电机中最小转速为750r/min远大于20r/min所以选用减速器 2、常用的减速器为单级圆柱齿轮减速器和二级圆柱齿轮减速器;其中单级圆柱减速器人字齿用于载荷较重的传动中,所以不合适,二级圆柱齿轮减速器中又分为展开式、同轴式、和分流式;其中同轴式结构复杂,轴向尺寸大,中间轴较长、刚度差,中间轴承润滑困难;分流式齿轮相对于轴承为对称分布,沿齿宽载荷分布均匀,但减速器结构复杂。相对于适合大功率、变载荷场合。而展开式一般采用斜齿轮,低速级也可采用直齿轮。传动比较大,结构简单,应用最广。适用于此次设计。 3、布置方式如下图所示: 图四 七、确定电动机型号 1、由圆整后的数据作如下图: 由图受力分析可知: AB=73mm BC=154mm CD=181 通过图测量得: L3= ɑ=33°β=32° 图五 2、计算电机所需功率P d 平面连杆机构所需要的功率:P W=P d* η○1由○1式得电机所需功率:P d=P W/η○2又P W=M A *n/9550 ○3 A点力矩:M A=F21*AB ○4 BC为二力杆件,受力分析得:F21*COSɑ=F23COSβ○5 对D点受力分析得:F N*L3=F23*CD ○6 由已知得F N=5000N代入○6式得:F23= 将F23代入○5式得:F21= 将F21代入○4式得:M A= 将M A代入○3式得:P W= 又η=将P W、η代入○2式得:P d= 3、由减速器类型知传动比i的值为8~40,由i=n1/n4得n1=i*n4所以得n1的值为160~800r/min 4、查表确定电机型号 根据P d、n1的值查表得知选用的电动机的型号为Y132S-8 八、课程设计总结 课程设计总结是对整个设计过程的系统总结。对设计计算和结构设计进行优缺点分析,特别是对不符合的设计和出现的错误做出一一分析,从而提高自己的机械设计能力。通过总结,把整个过程当中的问题理清楚、弄懂、弄透、,取得跟大的收获。 在总结时主要从以下几个方面: (1)以课程设计任务书的要求为依据,分析设计方案的合理性、设计计算及结构设计的正确性; (2)认真检查自己的设计的机械传动装置工作图、主要零件的零件的零件加工图以及设计说明书; (3)对设计说明书,着重检查和分析计算依据是否准确可靠、计算结果是否准确; (4)通过课程设计,分析自己掌握了那些设计技巧,以及在哪些地方有明显的提高,在今后的设计中提高自己的设计质量。 九、参考文献 【1】黄平、朱文坚.2004.机械设计基础.北京:人民教育出版社 【2】朱文坚、黄平.2002.机械设计(第二版)北:京高等教育出版社【3】王三民.2005.机械原理与设计课程设计.北京:机械工业出版社