第四章轨迹规划
第4章机器人轨迹规划
本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。
4.1 机器人轨迹规划概述
一、机器人轨迹的概念
机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。
机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。
机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。控制轨迹也就是按时间控制手部或工具中心走过的空间路径。
二、轨迹规划的一般性问题
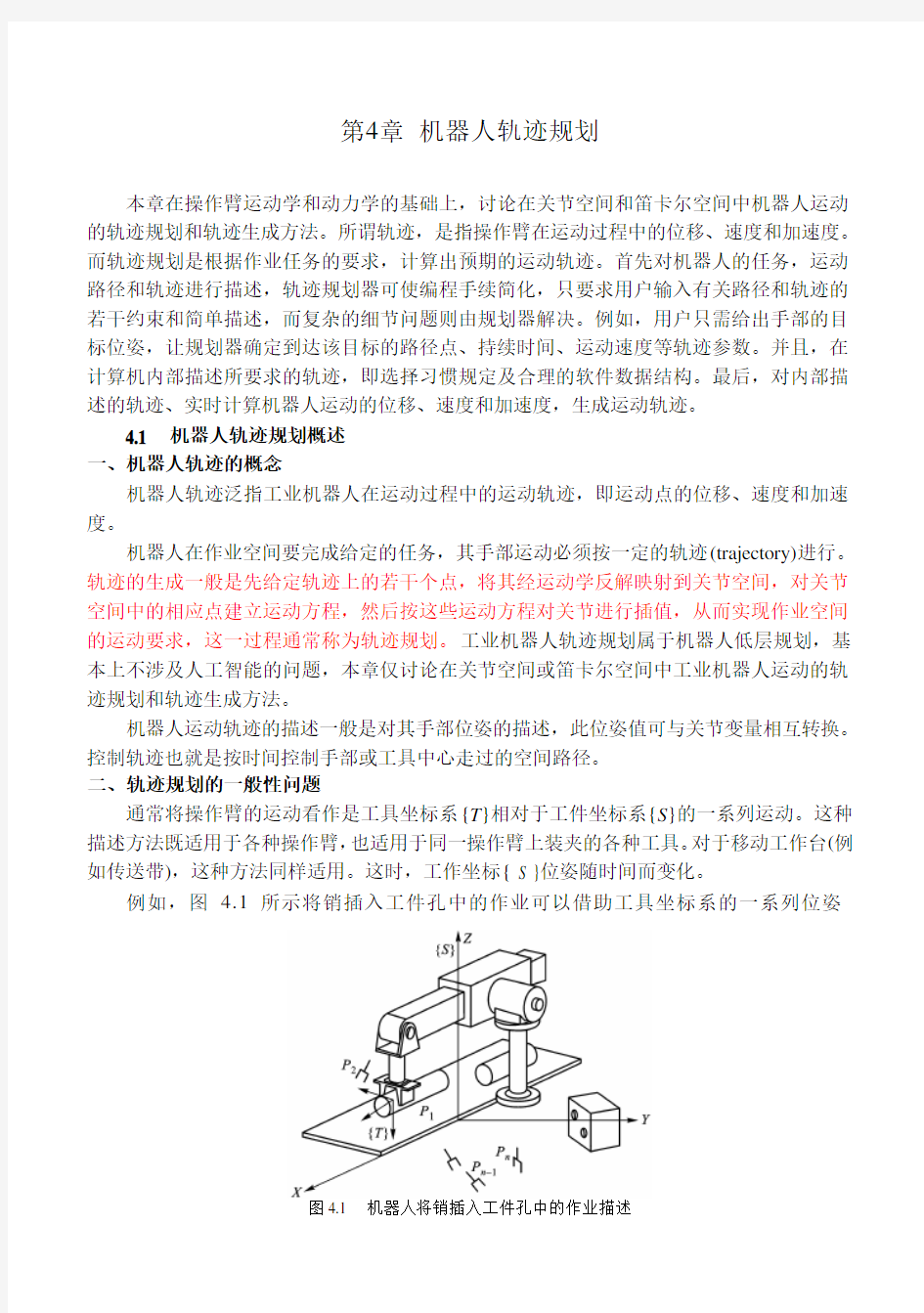
通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。对于移动工作台(例如传送带),这种方法同样适用。这时,工作坐标{ S }位姿随时间而变化。
例如,图 4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系列位姿
图4.1 机器人将销插入工件孔中的作业描述
P i(i=1,2,…,n)来描述。这种描述方法不仅符合机器人用户考虑问题的思路,而且有利于描述和生成机器人的运动轨迹。
用工具坐标系相对于工件坐标系的运动来描述作业路径是一种通用的作业描述方法。它把作业路径描述与具体的机器人、手爪或工具分离开来,形成了模型化的作业描述方法,从而使这种描述既适用于不同的机器人,也适用于在同一机器人上装夹不同规格的工具。在轨迹规划中,为叙述方便,也常用点来表示机器人的状态,或用它来表示工具坐标系的位姿,例如起始点、终止点就分别表示工具坐标系的起始位姿及终止位姿。
对点位作业(pick and place operation)的机器人(如用于上、下料),需要描述它的起始状态和目标状态,即工具坐标系的起始值{T0}。目标值{Tf}。在此,用“点”这个词表示工具坐标系的位置和姿态(简称位姿),例如起始点和目标点等。
对于另外一些作业,如弧焊和曲面加工等,不仅要规定操作臂的起始点和终止点,而且要指明两点之间的若干中间点(称路径点),必须沿特定的路径运动(路径约束)。这类称为连续路径运动(continuous—Path motion)或轮廓运动(contour motion),而前者称点到点运动(PTP=point—to—point motion)。
在规划机器人的运动时.还需要弄清楚在其路径上是否存在障碍物(障碍约束)。路径约束和障碍约束的组合将机器人的规划与控制方式划分为四类、如表4-1所示。
表4.1 机器人的规划与控制方式
障碍约束
有无
路径约束有离线无碰撞路径规则+在线路径跟踪离线路径规划+在线路径跟踪无位置控制+在线障碍探测和避障位置控制
本章主要讨论连续路径的无障碍的轨迹规划方法。轨迹规划器可形象地看成为一个黑箱(图4—2),其输入包括路径的“设定”和“约束”,输出的是操作臂末端手部的“位姿序列”,表示手部在各离散时刻的中间形位。操作臂最常用的轨迹规划方法有两种:第—种方法要求用户对于选定的轨迹结点(插值点)上的位姿、速度和加速度给出一组显式约束(例如连续性和光滑程度等),轨迹规划器从一类函数(例如n次多项式)中选取参数化轨迹,对结点进行插值,并满足约束条件。
第二种方法要求用户给出运动路径的解析式;如直角坐标空间中的直线路径,轨迹规
划器在关节空间或直角坐标空间中确定一条轨迹来逼近预定的路径。
在第一种方法中,约束的设定和轨迹规划均在关节空间进行。由于对操作臂手部(直角坐标形位)没有施加任何约束,用户很难弄清手部的实际路径,因此可能会发生与障碍物相碰。第二种方法的路径约束是在直角坐标空间中给定的、而关节驱动器是在关节空间中受控的。因此,为了得到与给定路径十分接近的轨迹,首先必须采用某种函数逼近的方法将直角坐标路径约束转化为关节坐标路径约束,然后确定满足关节路径约束的参数化路径。
轨迹规划既可在关节空间也可在直角空间中进行.但是所规划的轨迹函数都必须连续和平滑,使得操作臂的运动平稳。在关节空间进行规划时、是将关节变量表示成时间的函数,并规划它的一阶和二阶时间导数;在直角空间进行规划是指将手部位姿、速度和加速度表示为时间的函数。而相应的关节位移、速度和加速度由手部的信息导出。通常通过运动学反解得出关节位移、用逆稚可比求出关节速度,用逆雅可比及其导数求解关节加速度。
用户根据作业给出各个路径结点后.规划器的任务包含:解变换方程、进行运动学反解和插值运算等;在关节空间进行规划时,大量工作是对关节变量的插值运算。下面讨论关节轨迹的插值计算。
三、轨迹的生成方式
运动轨迹的描述或生成有以下几种方式:
(1) 示教-再现运动。这种运动由人手把手示教机器人,定时记录各关节变量,得到沿路径运动时各关节的位移时间函数q(t);再现时,按内存中记录的各点的值产生序列动作。
(2) 关节空间运动。这种运动直接在关节空间里进行。由于动力学参数及其极限值直接在关节空间里描述,所以用这种方式求最短时间运动很方便。
(3) 空间直线运动。这是一种直角空间里的运动,它便于描述空间操作,计算量小,适宜简单的作业。
(4) 空间曲线运动。这是一种在描述空间中用明确的函数表达的运动,如圆周运动、螺旋运动等。
四、轨迹规划涉及的主要问题
为了描述一个完整的作业,往往需要将上述运动进行组合。通常这种规划涉及到以下几方面的问题:
(1) 对工作对象及作业进行描述,用示教方法给出轨迹上的若干个结点(knot)。
(2) 用一条轨迹通过或逼近结点,此轨迹可按一定的原则优化,如加速度平滑得到直角空间的位移时间函数X(t)或关节空间的位移时间函数q(t);在结点之间如何进行插补,即根据轨迹表达式在每一个采样周期实时计算轨迹上点的位姿和各关节变量值。
(3) 以上生成的轨迹是机器人位置控制的给定值,可以据此并根据机器人的动态参数设计一定的控制规律。
(4) 规划机器人的运动轨迹时,尚需明确其路径上是否存在障碍约束的组合。一般将机器人的规划与控制方式分为四种情况,如表4.1所示。
4.2 插补方式分类与轨迹控制
一、插补方式分类
点位控制(PTP控制)通常没有路径约束,多以关节坐标运动表示。点位控制只要求满足起终点位姿,在轨迹中间只有关节的几何限制、最大速度和加速度约束;为了保证运动的连续性,要求速度连续,各轴协调。连续轨迹控制(CP控制)有路径约束,因此要对路径进行设计。路径控制与插补方式分类如表4.2所示。
表
4.2 路径控制与插补方式分类
路径控制不插补关节插补(平滑) 空间插补
点位控制PTP
(1) 各轴独立快速到达。
(2) 各关节最大加速度
限制
(1) 各轴协调运动定时插补。
(2) 各关节最大加速度限制
连续路径控制CP
(1) 在空间插补点间进行关
节定时插补。
(2) 用关节的低阶多项式拟合
空间直线使各轴协调运动。
(3) 各关节最大加速度限制
(1) 直线、圆弧、
曲线等距插补。
(2) 起停线速
度、线加速度给
定,各关节速度、
加速度限制
二、机器人轨迹控制过程
机器人的基本操作方式是示教-再现,即首先教机器人如何做,机器人记住了这个过程,于是它可以根据需要重复这个动作。操作过程中,不可能把空间轨迹的所有点都示教一遍使机器人记住,这样太繁琐,也浪费很多计算机内存。实际上,对于有规律的轨迹,仅示教几个特征点,计算机就能利用插补算法获得中间点的坐标,如直线需要示教两点,圆弧需要示教三点,通过机器人逆向运动学算法由这些点的坐标求出机器人各关节的位置和角度(θ1, …, θn),然后由后面的角位置闭环控制系统实现要求的轨迹上的一点。继续插补并重复上述过程,从而实现要求的轨迹。
机器人轨迹控制过程如图4.3所示。
图4.3 机器人轨迹控制过程
4.3 机器人轨迹插值计算
给出各个路径结点后,轨迹规划的任务包含解变换方程,进行运动学反解和插值计算。在关节空间进行规划时,需进行的大量工作是对关节变量的插值计算。
一、直线插补
直线插补和圆弧插补是机器人系统中的基本插补算法。对于非直线和圆弧轨迹,可以采用直线或圆弧逼近,以实现这些轨迹。
空间直线插补是在已知该直线始末两点的位置和姿态的条件下,求各轨迹中间点(插补点)的位置和姿态。由于在大多数情况下,机器人沿直线运动时其姿态不变,所以无姿态插补,即保持第一个示教点时的姿态。当然在有些情况下要求变化姿态,这就需要姿态插补,
可仿照下面介绍的位置插补原理处理,也可参照圆弧的姿
态插补方法解决,如图4.4所示。已知直线始末两点的坐
标值P 0(X 0,Y 0,Z 0)、P e (X e ,Y e ,Z e )及姿态,其中P 0、P e
是相对于基坐标系的位置。这些已知的位置和姿态通常是
通过示教方式得到的。设v 为要求的沿直线运动的速度;
t s 为插补时间间隔。 为减少实时计算量,示教完成后,可求出:
直线长度
()()()222e 0e 0e 0L X X Y Y Z Z =-+-+-;
t s 间隔内行程d = vt s ;
插补总步数N 为L /d +1的整数部分;
各轴增量
()()()e 0e 0e 0///X X X N Y Y Y N
Z Z Z N ?=-?=-?=-
各插补点坐标值
111i i i i i i X X i X
Y Y i Y
Z Z i Z +++=+?=+?=+?
式中:i =0,1,2,…,N 。
图4.4 空间直线插补
二、圆弧插补
1.平面圆弧插补
平面圆弧是指圆弧平面与基坐标系的三大平面之一重合,以XOY 平面圆弧为例。已知不在一条直线上的三点P 1、P 2、P 3及这三点对应的机器人手端的姿态,如图4.5及图4.6所示。
图4.5 由已知的三点P 1、P 2、P 3决定的圆弧图4.6 圆弧插补 设v 为沿圆弧运动速度;t s 为插补时时间隔。类似直线插补情况计算出:
(1) 由P 1、P 2、P 3决定的圆弧半径R 。
(2) 总的圆心角φ=φ1+φ2,即
(){}(){}2222
121212222
23232
arccos ()2/2arccos ()2/2X X Y Y R R X X Y Y R R φφ??=-+--????=-+--?? (3) t s 时间内角位移量?θ=t s v /R ,据图4.4所示的几何关系求各插补点坐标。
(4) 总插补步数(取整数)
N = φ/?θ + 1
对P i +1 点的坐标,有
1cos()cos cos sin sin cos sin i i i i i i X R R R X Y θθθθθθθθ+=+?=?-?=?-?
式中:X i =R cos θi ;Y i =R sin θi 。
同理有
1sin()sin cos cos sin cos sin i i i i i i Y R R R Y X θθθθθθθθ+=+?=?+?=?+?
由θi+1=θi +?θ可判断是否到插补终点。若θi+1≤φ,则继续插补下去;当θi+1>φ 时,则修正最后一步的步长?θ,并以θ'?表示,i θφθ'?=-,故平面圆弧位置插补为
111cos sin cos sin i i i i i i i i X X Y Y Y X θθθθθθθ+++=?-???=?+???=+??
2.空间圆弧插补
空间圆弧是指三维空间任一平面内的圆弧,此为空间一般平面的圆弧问题。
空间圆弧插补可分三步来处理:
(1) 把三维问题转化成二维,找出圆弧所在平面。
(2) 利用二维平面插补算法求出插补点坐标(X i+1, Y i+1)。
(3) 把该点的坐标值转变为基础坐标系下的值,如图4.7所示。
图4.7 基础坐标与空间圆弧平面的关系
通过不在同一直线上的三点P1、P2、P3可确定一个圆及三点间的圆弧,其圆心为O R,半径为R,圆弧所在平面与基础坐标系平面的交线分别为AB、BC、CA。
建立圆弧平面插补坐标系,即把O R X R Y R Z R坐标系原点与圆心O R重合,设O R X R Y R Z R平面为圆弧所在平面,且保持Z R为外法线方向。这样,一个三维问题就转化成平面问题,可以应用平面圆弧插补的结论。
求解两坐标系(图 4.7)的转换矩阵。令T R表示由圆弧坐标O R X R Y R Z R至基础坐标系OX0Y0Z0的转换矩阵。
若Z R轴与基础坐标系Z0轴的夹角为α,X R轴与基础坐标系的夹角为θ,则可完成下述步骤:
①将X R Y R Z R的原点O R放到基础原点O上;②绕Z R轴转θ,使X0与X R平行;③再绕X R轴转α角,使Z0与Z R平行。
这三步完成了X R Y R Z R向X0Y0Z0的转换,故总转换矩阵应为
(,,)(,)(,)
cos sin cos sin cos sin cos cos cos sin 0sin cos 0001R R R R R R R O O O O O O X Y Z Z X X Y Z θαθθθθθθθαθααα=-????-??=????
????T T R R (4.1)
式中:R O X 、R O Y 、R O Z 为圆心O R 在基础坐标系下的坐标值。
欲将基础坐标系的坐标值表示在O R X R Y R Z R 坐标系,则要用到T R 的逆矩阵
()()()
1cos sin 0cos sin sin cos cos cos sin sin cos cos cos sin sin sin cos sin cos sin sin cos sin cos 0001R R R R R R R R O O O O O R O O O X Y X Y Z X Y Z θθθθθθθααθαθααθαθααθαθαα-??-+????--++??=??--++??????T 三、定时插补与定距插补
由上述可知,机器人实现一个空间轨迹的过程即是实现轨迹离散的过程,如果这些离散点间隔很大,则机器人运动轨迹与要求轨迹可能有较大误差。只有这些插补得到的离散点彼此距离很近,才有可能使机器人轨迹以足够的精确度逼近要求的轨迹。模拟CP 控制实际上是多次执行插补点的PTP 控制,插补点越密集,越能逼近要求的轨迹曲线。
插补点要多么密集才能保证轨迹不失真和运动连续平滑呢?可采用定时插补和定距插补方法来解决。
1.定时插补
从图4.3所示的轨迹控制过程知道,每插补出一轨迹点的坐标值,就要转换成相应的关节角度值并加到位置伺服系统以实现这个位置,这个过程每隔一个时间间隔t s 完成一次。为保证运动的平稳,显然t s 不能太长。
由于关节型机器人的机械结构大多属于开链式,刚度不高,t s 一般不超过25 ms(40 Hz),这样就产生了t s 的上限值。当然t s 越小越好,但它的下限值受到计算量限制,即对于机器人的控制,计算机要在t s 时间里完成一次插补运算和一次逆向运动学计算。对于目前的大多数机器人控制器,完成这样一次计算约需几毫秒。这样产生了t s 的下限值。当然,应当选择t s 接近或等于它的下限值,这样可保证较高的轨迹精度和平滑的运动过程。
以一个XOY 平面里的直线轨迹为例说明定时插补的方法。
设机器人需要的运动轨迹为直线,运动速度为v (mm/s),时间间隔为t s (ms),则每个t s 间隔内机器人应走过的距离为
P i P i +1= vt s (4.2)
可见两个插补点之间的距离正比于要求的运动速度,两点之间的轨迹不受控制,只有插补点之间的距离足够小,才能满足一定的轨迹精度要求。
机器人控制系统易于实现定时插补,例如采用定时中断方式每隔t s中断一次进行一次插补,计算一次逆向运动学,输出一次给定值。由于t s仅为几毫秒,机器人沿着要求轨迹的速度一般不会很高,且机器人总的运动精度不如数控机床、加工中心高,故大多数工业机器人采用定时插补方式。
当要求以更高的精度实现运动轨迹时,可采用定距插补。
2.定距插补
由式(4.2)可知v是要求的运动速度,它不能变化,如果要两插补点的距离P i P i+1恒为一个足够小的值,以保证轨迹精度,t s就要变化。也就是在此方式下,插补点距离不变,但t s 要随着不同工作速度v的变化而变化。
这两种插补方式的基本算法相同,只是前者固定t s,易于实现,后者保证轨迹插补精度,但t s要随之变化,实现起来比前者困难。
四、关节空间插补
如上所述,路径点(结点)通常用工具坐标系以相对于工作坐标系位姿来表示。为了求得在关节空间形成所要求的轨迹,首先用运动学反解将路径点转换成关节矢量角度值,然后对每个关节拟合一个光滑函数,使之从起始点开始,依次通过所有路径点,最后到达目标点。
对于每一段路径,各个关节运动时间均相同,这样保证所有关节同时到达路径点和终止点,从而得到工具坐标系应有的位置和姿态。但是,尽管每个关节在同一段路径中的运动时间相同,各个关节函数之间却是相互独立的。
总之,关节空间法是以关节角度的函数来描述机器人的轨迹的,关节空间法不必在直角坐标系中描述两个路径点之间的路径形状,计算简单、容易。再者,由于关节空间与直角坐标空间之间并不是连续的对应关系,因而不会发生机构的奇异性问题。
在关节空间中进行轨迹规划,需要给定机器人在起始点、终止点手臂的形位。对关节进行插值时,应满足一系列约束条件,例如抓取物体时,手部运动方向(初始点),提升物体离开的方向(提升点),放下物体(下放点)和停止点等结点上的位姿、速度和加速度的要求;与此相应的各个关节位移、速度、加速度在整个时间间隔内连续性要求;其极值必须在各个关节变量的容许范围之内等。在满足所要求的约束条件下,可以选取不同类型的关节插值函数生成不同的轨迹。本节着重讨论关节轨迹的插值方法“
1.三次多项式插值
在操作臂运动的过程中,由于相应于起始点的关节角度 0是已知的.而终止点的关节
角θf 可以通过运动学反解得到,因此,运动轨迹的描述,可用起始点关节角与终止点关节角度的一个平滑插值函数θ (t )来表示。θ (t )在t 0=0时刻的值是起始关节角度θ0,终端时刻t f 的值是终止关节角度θf 。显然,有许多平滑函数可作为关节插值函数,如图4—3所示。
为实现单个关节的平稳运动,轨迹函数θ (t )至少需要满足四个约束条件,即两端点位置约束和两端点速度约束。
端点位置约束是指起始位姿和终止位姿分别所对应的关节角度。θ (t )在时刻t 0=0时的值是起始关节角度θ0,在终端时刻t f 时的值是终止关节角度θf ,即
()()0f f 0t θθθθ=?
??=??
为满足关节运动速度的连续性要求,两外还有两个约束条件,即在起始点和终止点的关节速度要求。在但前的情况下,可简单地设定为零,即
()()f 000t θθ?=??=??&&
上面给出的四个约束条件可以惟一地确定一个三次多项式
()230123t a a t a t a t θ=+++
运动过程中的关节速度和加速度则为
()()2123232326t a a t a t t a a t θθ?=++??=+??&&&
为求得三次多项式的系数a 0,a 1,a 2和a 3,代以给定的约束条件,有方程组
0023f 01f 2f 3f 1212f 3f 0023a a a t a t a t a a a t a t θθ=??=+++??=?
?=++?(4.7)
求解该方程组,可得
求轨迹方程的几种常用方法
求轨迹方程的几种常用方法 求轨迹的方程,是学习解析几何的基础,求轨迹的方程常用的方法主要有: 1直接法: 若命题中所求曲线上的动点与已知条件能直接发生关系,这时,设曲线上动点坐标为( x, y )后,就可根据命题中的已知条件,研究动点形成的几何特征,在此基础上运用几何或代数的基本公式、定理等列出含有x,y 的关系式。从而得到轨迹方程,这种求轨迹方程的方法称作直接法。 例1 :在直角△ ABC中,斜边是定长2a (a 0),求直角顶点C的轨迹方程。 解:由于未给定坐标系,为此,首先建立直角坐标系,取AB所在的直线为X轴,AB的中点0为坐 标原点,过0与AB垂直的直线为y轴(如图).则有A ( a,0), B (a,0)。 设动点C为(x, y), ??? | AC |2 |BC |2 |AB|2, a)2y2]2h(x a)2y2]24a2, 即x2 由于C点到达A、B位置时直角三角形ABC不存在,轨迹中应除去A、B两点, 故所求方程为x2y2a2( x a )。 2?代入法(或利用相关点法): 即利用动点是定曲线上的动点,另一动点依赖于它,那么可寻求它们坐标之间的关系,然后代入定曲线的方程进行求解,就得到原动点的轨迹。 例2 :已知一条长为6的线段两端点A、B分别在x、y轴上滑动,点M在线段AB上,且AM : MB 1:2,求动点M的轨迹方程。 解:设 A (a,0) , B (0, b), M (x, y), 一方面,. 另一方面, 36 , M分AB的比为 1 , 2
评注:本例中,由于 M 点的坐标随着 A 、B 的变化而变化,因而动点 M 的坐标(x, y)可以用A 、B 点 的坐标来表示,而点 M 又满足已知条件,从而得到 M 的轨迹方程。此外,与上例一样,求曲线的方程时, 要充分注意化简过程是否完全同解变形,还要考虑曲线上的一些特殊点。 3.几何法: 求动点轨迹问题时,动点的几何特征与平面几何中的定理及有关平面几何知识有着直接或间接的联 系,且利用平面几何的知识得到包含已知量和动点坐标的等式,化简后就可以得到动点的轨迹方程,这种 求轨迹方程的方法称作几何法。 求动点P 的轨迹方程。 解:设P (x, y),由题 APO BPO ,由三角形角平分线定理有 L P A | ^A 0-1 |PB| |BO| ..(x 6)2 y 2 3 3 , (x 2)2 y 2 整理得x 2 y 2 6x 0,当x 0时,y 0, P 和O 重合,无 意义,??? x 0, 又易知P 落在x 轴上时,除线段AB 以外的任何点均有 APO BPO 00 , ? y 0 ( x 6或x 2)也满足要求。 综上,轨迹方程为 x 2 y 2 6x 0 ( x 0)或y 0 (x 6或x 2 )。 评注:本例利用平面几何的知识(三角形的角平分线定理进行解题) ,方便了求轨迹的方程。 4.参数法: 有时很难直接找出动点的横、纵坐标之间关系。如果借助中间量(参数) 联系,然后再从所求式子中消去参数,这便可得动点的轨迹方程。 0 -b _2_ 1 - -b 3 a x 2 b 3y ②代入①得: 3 2 2 (評(3y) 2 36,即一 16 例3 :如图,已知两定点 A ( 6,0 ), B ( 2,0 ), O 为原点,动点 P 与线段AO 、BO 所张的角相等, ,使(x, y)之间的关系建立起
路径轨迹规划
路径轨迹规划 (1)加减速控制简述 加减速控制算法的目标是建立加减速过程中速度相对于时间的函数关系式f=V(t)。 按照加减速控制算法与插补算法的先后位置关系,加减速控制方式可分为前加减速控制和后加减速控制。前加减速控制即插补计算前进行加减速运算,其优点在于对合成速度进行控制,不影响位置精度,但是需要预测减速点;后加减速控制即插补计算后进行加减速运算,它是对各插补轴分别进行加减速控制,由于各轴没有协调关系,因此合成位置可能不准确。后加减速控制只适用线性插补,在应用上有很大的局限性。 (2)几种速度控制模型 1)直线加减速速度控制模型 直线加减速是当机床启动、停止或者运动速速改变时,速度将按照一定斜率的直线上升或下降。 数学表达式为:at t +=0)(νν 直线加减速控制算法的主要优点是算法简单,机器人响应快,效率高,适合进行实时运算,但是机器人运动存在柔性冲击,速度的过渡不够平滑。 2)指数加减速速度控制模型 指数加减速是启动或停止时的速度发生突变,并且速度变化随时间按指数规律上升或下降。 速度数学表达式为: 加速时:)1()(τ t c e v t v --= 减速时:τ t c e v t v -=)( 加速度数学表达式为: 加速时:ττ t c e v t a -=)()( 减速时:ττ t c e v t a --=)()( 指数型加减速曲线的优点是数学表达式相对简单,可以实时计算,加减速结 束时加速度变小冲击变小;缺点是启动过程仍存在较大冲击。 2)S 曲线加减速速度控制模型 通过对启动阶段即高速阶段的加速度衰减,来保证电机性能的充分发挥和减小启动冲击。 正常情况下S 曲线加减速的运行过程分为7段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段、减减速段,如下图所示:
求曲线轨迹方程的五种方法
求曲线轨迹方程的五种方法 一、直接法 如果题目中的条件有明显的等量关系,或者可以利用平面几何知 识推出等量关系,求方程时可用直接法。 例1长为2a的线段AB的两个端点分别在x轴、y轴上滑动,求AB 中点P的轨迹方程。 /解:设点P的坐标为(x, y),\ 则A(2x,0),B(0,2y),由|AB|=2a 得\、(2x 0)2(0 2y)2=2a 化简得x2+y2=a,即为所求轨迹方程 点评:本题中存在几何等式|AB|=2a,故可用直接法解之。 二、定义法 如果能够确立动点的轨迹满足某种已知曲线的定义,则可用曲线定义写出方程,这种方法称为定义法。 例2动点P到直线x+4=0的距离减去它到M (2, 0)的距离之 差等于2,则点P的轨迹是() A、直线 B、椭圆 C、双曲线 D、抛物线 解法一:由题意,动点P到点M (2,0)的距离等于这点到直 线x=-2的距离,因此动点P的轨迹是抛物线,故选D。 解法二:设P点坐标为(x,y),则/ |x+4|- (x 2)2 y2=2
当x > -4 时,x+4- (x 2)2 y2=2 化简得
当时,y2=8x 当x V -4 时,-X-4- .. (x 2)2 y2=2 无解 所以P点轨迹是抛物线y2=8x 点评:解法一与解法二分别用定义法和直接法求轨迹方程,明显, 解法一优于后一种解法,对于有些求轨迹方程的题目,若能采用定义法,则优先采用定义法,它能大量地简化计算。 三、代入法 如果轨迹点P(x,y)依赖于另一动点Q(a, b),而Q(a, b)又在某已知曲线上,则可先列出关于x、y、a、b的方程组,利用x、y表示出a、b,把a、b代入已知曲线方程便得动点P的轨迹方程,此法称为代入法。 2 2 例3 P 在以F1、F2为焦点的双曲线16七1上运动,则厶F1F2P 、k2 (x2 y2) ? . x2 y2=12 ??? k (x2+y2) =12,又点M在已知圆上, ??? 13k2x2+13k2y2-15kx-36ky=0 由上述两式消去x2+y2得 5x+12y-52=0 点评:用参数法求轨迹,设参尽量要少,消参较易。 五、交轨法 若动点是两曲线的交点,可以通过这两曲线的方程直接求出交点方程,
第四章轨迹规划.doc
第4章机器人轨迹规划 本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。 4.1 机器人轨迹规划概述 一、机器人轨迹的概念 机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。 机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。 机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。控制轨迹也就是按时间控制手部或工具中心走过的空间路径。 二、轨迹规划的一般性问题 通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。对于移动工作台(例如传送带),这种方法同样适用。这时,工作坐标{ S }位姿随时间而变化。 例如,图 4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系列位姿 图4.1 机器人将销插入工件孔中的作业描述
求曲线轨迹方程的常用方法
求曲线轨迹方程的常用 方法 Hessen was revised in January 2021
高考数学专题:求曲线轨迹方程的常用方法 张昕 陕西省潼关县潼关高级中学 714399 求曲线的轨迹方程,其实质就是利用题设中的几何条件,用“坐标化”将其转化为寻求变量间的关系.这类问题除了考查考生对曲线的定义、性质等基础知识的掌握,还充分考查了各种数学思想方法及一定的推理能力和运算能力.因此要分析轨迹的动点和已知条件的内在联系,选择最便于反映这种联系的形式建立等式.其常见方法如下: (1)直接法:直接法就是将动点满足的几何条件或者等量关系,直接坐标化,列出等式化简即得动点轨迹方程,这种求轨迹方程的方法就称为直接法,直接法求轨迹经常要联系平面图形的性质. (2)定义法:若动点轨迹的条件符合某一基本轨迹的定义(如椭圆、双曲线、抛物线、圆等),可以设出其标准方程,然后用待定系数法求解.这种求轨迹方程的方法称为定义法,利用定 义法求方程要善于抓住曲线的定义特征. (3)代入法:根据相关点所满足的方程,通过转换而求动点的轨迹方程.这就叫代入法.
(4) 参数法:若动点的坐标(x ,y )中的x ,y 分别随另一变量的 变化而变化,我们可以以这个变量为参数,建立轨迹的参数方程,消去参数来求轨迹方程. (5) 几何法:根据曲线的某种几何性质和特征,通过推理列出等式 求轨迹方程,这种求轨迹的方法叫做几何法. (6) 交轨法:在求动点轨迹方程时,经常遇到求两动曲线的交点轨 迹方程问题,我们列出两动曲线的方程再设法消去曲线中的参数即可得到交点的轨迹方程. 典型例题示范讲解: 设圆C :22(1)1x y -+=,过原点作圆的弦0A ,求OA 中点B 的轨迹方程. 【解】:法一:(直接法) 如图,设B (x ,y ),由题得2OB +2BC =2OC , 即x 2+y 2 +[22(1)x y -+]=1 即OA 中点B 的轨迹方程为2211()24 x y -+=(x ≠0). 法二:(定义法) 设B (x ,y ),如上图,因为B 是OA 的中点
求曲线轨迹方程专题(2)
轨 迹 方 程 问 题 常见的有六种求轨迹方程的方法: ①待定系数法:由几何量确定轨迹方程; ②定义法:根据曲线的定义,求轨迹方程; ③直接法:给出某些条件(几何、三角或向量表达式等)求轨迹方程; ④“代入法”求轨迹方程; ⑥参数法(包括解决中点弦问题的点差法)求轨迹方程. ⑤“交轨法”求轨迹方程; 1.直接法求轨迹方程.给出某种条件:平面几何、三角函数、解析几何、向量形式等.求解程序:①设动点P 的坐标为P(x ,y);②按题目的条件写出关系式;③整合关系式;④注明范围. 例1.设m R ∈,在平面直角坐标系中,已知向量(,1)a mx y =+,向量(,1)b x y =-,a b ⊥,动点 (,)M x y 的轨迹为E .求轨迹E 的方程,并说明该方程所表示曲线的形状; 解:因为a b ⊥,(,1)a mx y =+,(,1)b x y =-,所以a ·b =2210mx y +-=, 即 221mx y +=. 当m =0时,方程表示两条直线:1±=y ; 当1m =时,方程表示的是圆:221x y +=; 当m >0且1≠m 时,方程表示的是椭圆; 当m <0时,方程表示的是双曲线. 2.根据圆锥曲线的定义,求轨迹方程
P M N 例2.如图,圆O 1与圆O 2的半径都是1,O 1O 2=4,过动点P 分别作圆O 1、圆O 2的切线PM 、PN (M 、N 分别为切点) ,使得PM =试建立适当的坐标系,并求动点 P 的轨迹方程. 解:如图,以直线12O O 为x 轴,线段12O O 的垂直平分线为y 轴,建立平面直角坐标系,则两圆心 分 别 为 12(2,0),(2,0) O O -.设 (,) P x y , 则,同理 222(2)1PN x y =-+-.2222211(2)1PM O P O M x y =-=++- ∵PM =, ∴2222(2)12[(2)1]x y x y ++-=-+-, 即221230x x y -++=,即22(6)33x y -+=. 这就是动点P 的轨迹方程. 注:动圆圆心轨迹问题 ①动圆与两外离定圆均外切(含相交);②动圆过定点且定圆外切;③动圆过定点且定直线相切;④动圆与两定圆一个外切,一个内切;⑤动圆过定点且定圆相切. 3.参数法求轨迹方程: 例3.动圆P 过点A (0,1)且与直线y=-1相切,O 是坐标原点,动圆P 的圆心轨迹是曲线C. (1)求曲线C 的方程; (2)过A 作直线l 交曲线C 于,D E 两点,求弦DE 的中点M 的轨迹方程; (3)在(2)中求ODE ?的重心G 的轨迹方程。 解:(1)点P 到点A 的距离等于点P 到直线y= -1的距离,故点P 的轨迹C 是以点A 为焦点,直线y=-1为准线的抛物线,所以曲线C 的方程 x 2=4y. 2222 A , 1 4440,+=4,(+)2, 1, 2 1 2()1,1.2221l x y x x kx k x k y x x k y y x y =====+=?=?+=+?=+? 1122212122 (2)设M(x,y),D(x ,y ),E(x ,y ),依题意知过的直线的斜率存在,设该直线的方程为:y=kx+1 与联立,消整理得:--则x x 则x x kx+1=2k 2k 即,消去得:即为所求的方程k 另解:(2)
机械臂的轨迹规划
机械臂运动的轨迹规划 摘要 空间机械臂是一个机、电、热、控一体化的高集成的空间机械系统。随着科技的发展,特别是航空飞机、机器人等的诞生得到了广泛的应用,空间机械臂作为在轨迹的支持、服务等以备受人们的关注。本文将以空间机械臂为研究对象,针对空间机械臂的直线运动、关节的规划、空间直线以及弧线的轨迹规划几个方面进行研究,对机械臂运动和工作空间进行了分析,同时对机械臂的轨迹规划进行了验证,利用MATLAB软件对机械臂的轨迹进行仿真,验证算法的正确性和可行性,同时此路径规划方法可以提高机械臂的作业效率,为机械臂操作提高理论指导,为机器人更复杂的运动仿真与路径规划打下基础。 本文一共分为四章: 第一章,首先总结了机械臂运动控制与轨迹规划问题的研究现状及研究方法,归纳了各种轨迹规划的算法及其优化方法,阐述了机械臂的研究背景和主要内容。 第二章,对机械臂的空间运动进行分析研究,采用抽样求解数值法—蒙特卡洛方法,进行机械臂工作空间求解,同时在MATLAB中进行仿真,直观展示机械臂工作范围,为下一章的轨迹规划提供理论基础;同时通过D-H参数法对机械臂的正、逆运动分析求解,分析两者的区别和联系。 第三章,主要针对轨迹规划的一般性问题进行分析,利用笛卡尔空间的轨迹规划方法对机械臂进行轨迹规划,同时利用MATLAB对空间直线和空间圆弧进行轨迹规划,通过仿真验证算法的正确性和可行性。 第四章,总结全文,分析本文应用到机械臂中的控制算法,通过MATLAB 结果可以得出本文所建立的算法正确性,能够对机械臂运动提供有效的路径,而且改进了其他应用于空间机械臂的路径规划问题。 【关键词】运动分析工作空间算法研究轨迹规划
圆锥曲线之轨迹方程的求法
圆锥曲线之轨迹方程的求法(一) (制卷:周芳明) 【复习目标】 □1. 了解曲线与方程的对应关系,掌握求曲线方程的一般步骤; □2. 会用直接法、定义法、相关点法(坐标代换法)求方程。 【基础练习】 1.到两坐标轴的距离相等的动点的轨迹方程是( ) A .y x = B .||y x = C .22y x = D .220x y += 2.已知点(,)P x y 4,则动点P 的轨迹是 ( ) A .椭圆 B .双曲线 C .两条射线 D .以上都不对 3.设定点1(0,3)F -、2(0,3)F ,动点P 满足条件129(0)PF PF a a a +=+>,则点P 的轨迹( ) A .椭圆 B .线段 C. 不存在 D .椭圆或线段 4.动点P 与定点(1,0)A -、(1,0)B 的连线的斜率之积为1-,则P 点的轨迹方程为______________. 【例题精选】 一、直接法求曲线方程 根据题目条件,直译为关于动点的几何关系,再利用解析几何有关公式(两点距离公式、点到直线距离公式、夹角公式等)进行整理、化简。即把这种关系“翻译”成含x ,y 的等式就得到曲线的轨迹方程了。 例1.已知ABC ?中,2,AB BC m AC ==,试求A 点的轨迹方程,并说明轨迹是什么图形. 练习:已知两点M (-1,0)、N (1,0),且点P 使MP MN ,PM PN ,NM NP 成公差小于零的等差数列。点P 的轨迹是什么曲线?
二定义法 若动点轨迹满足已知曲线的定义,可先设定方程,再确定其中的基本量,求出动点的轨迹方程。 例1.⊙C :22(3)16x y ++=内部一点(3,0)A 与圆周上动点Q 连线AQ 的中垂线交CQ 于P ,求点P 的轨迹方程. 例2.设动点(,)(0)P x y x ≥到定点1(,0)2F 的距离比它到y 轴的距离大12 。记点P 的轨迹为 曲线C 求点P 的轨迹方程; 练习.若动圆与圆1)2(:2 21=++y x C 相外切,且与直线1=x 相切,则动圆圆心轨迹方程是 . 三代入法 有些问题中,其动点满足的条件不便用等式列出,但动点是随着另一动点(称之为相关点)而运动的。如果相关点所满足的条件是明显的,或是可分析,这时我们可以用动点坐标表示相关点坐标,根据相关点所满足的方程即可求得动点的轨迹方程,这种求轨迹的方法叫做相关点法。这种方法是一种极常用的方法,连续好几年高考都考查。 例1、已知定点A ( 3, 0 ),P 是圆x 2 + y 2 = 1上的动点,∠AOP 的平分线交AP 于M , 求M 点的轨迹。
求曲线轨迹方程的五种方法
求曲线轨迹方程的五种 方法 TYYGROUP system office room 【TYYUA16H-TYY-TYYYUA8Q8-
求曲线轨迹方程的五种方法 一、直接法 如果题目中的条件有明显的等量关系,或者可以利用平面几何知识推出等量关系,求方程时可用直接法。 例1 长为2a的线段AB的两个端点分别在x轴、y轴上滑动,求AB中点P的轨迹方程。 解:设点P的坐标为(x,y), 则A(2x,0),B(0,2y),由|AB|=2a得 2) 2 x- 2(y + -=2a 2 0( )0 化简得x2+y2=a,即为所求轨迹方程 点评:本题中存在几何等式|AB|=2a,故可用直接法解之。 二、定义法 如果能够确立动点的轨迹满足某种已知曲线的定义,则可用曲线定义写出方程,这种方法称为定义法。 例2 动点P到直线x+4=0的距离减去它到M(2,0)的距离之差等于2,则点P的轨迹是() A、直线 B、椭圆 C、双曲线 D、抛物线 解法一:由题意,动点P到点M(2,0)的距离等于这点到直线x=-2的距离,因此动点P的轨迹是抛物线,故选D。 解法二:设P点坐标为(x,y),则 |x+4|-2 2 -=2 x+ (y )2
当x ≥-4时,x+4-22)2(y x +-=2化简得 当时,y 2=8x 当x <-4时,-x-4-22)2(y x +-=2无解 所以P 点轨迹是抛物线y 2=8x 点评:解法一与解法二分别用定义法和直接法求轨迹方程,明显,解法一优于后一种解法,对于有些求轨迹方程的题目,若能采用定义法,则优先采用定义法,它能大量地简化计算。 三、 代入法 如果轨迹点P (x ,y )依赖于另一动点Q (a ,b ),而Q (a ,b )又在某已知曲线上,则可先列出关于x 、y 、a 、b 的方程组,利用x 、y 表示出a 、b ,把a 、b 代入已知曲线方程便得动点P 的轨迹方程,此法称为代入法。 例3 P 在以F 1、F 2为焦点的双曲线19 1622=-y x 上运动,则△F 1F 2P 的重心G 的轨迹方程是 。 解:设P (x 0,y 0),G (x ,y ),则有 ??? ????++=+-=)00(31)4(3100y y x x x 即???==y y x x 3300,代入 191622=-y x 得19 91692 2=-y x 即116 922 =-y x 由于G 不在F 1F 2上,所以y ≠0
轨迹方程的 几种求法整理(例题+答案)
轨迹方程的六种求法整理 求轨迹方程是高考中常见的一类问题.本文对曲线方程轨迹的求法做一归纳,供同学们参考. 求轨迹方程的一般方法: 1. 直译法:如果动点P 的运动规律是否合乎我们熟知的某些曲线的定义难以判断,但点P 满足的等量关系易于建立,则可以先表示出点P 所满足的几何上的等量关系,再用点P 的坐标(x ,y )表示该等量关系式,即可得到轨迹方程。 2. 定义法:如果动点P 的运动规律合乎我们已知的某种曲线(如圆、椭圆、双曲线、抛物线)的定义,则可先设出轨迹方程,再根据已知条件,待定方程中的常数,即可得到轨迹方程 3. 参数法:如果采用直译法求轨迹方程难以奏效,则可寻求引发动点P 运动的某个几何量t ,以此量作为参变数,分别建立P 点坐标x ,y 与该参数t 的函数关系x =f (t ), y =g (t ),进而通过消参化为轨迹的普通方程F (x ,y )=0。 4. 代入法(相关点法):如果动点P 的运动是由另外某一点P'的运动引发的,而该点的运动规律已知,(该点坐标满足某已知曲线方程),则可以设出P (x ,y ),用(x ,y )表示出相关点P'的坐标,然后把P'的坐标代入已知曲线方程,即可得到动点P 的轨迹方程。 5. 交轨法:在求动点轨迹时,有时会出现要求两动曲线交点的轨迹问题,这种问题通常通过解方程组得出交点(含参数)的坐标,再消去参数求得所求的轨迹方程(若能直接消去两方程的参数,也可直接消去参数得到轨迹方程),该法经常与参数法并用。 6. 待定系数法:已知曲线是圆,椭圆,抛物线,双曲线等 一、直接法 把题目中的等量关系直接转化为关于x,y,的方程基本步骤是:建系。设点。列式。化简。说明等,圆锥曲线标准方程的推导。 1. 已知点(20)(30)A B -,,,,动点()P x y ,满足2PA PB x =·,求点P 的轨迹。26y x =+, 2. 2.已知点B (-1,0),C (1,0),P 是平面上一动点,且满足.||||CB PB BC PC ?=? (1)求点P 的轨迹C 对应的方程; (2)已知点A (m,2)在曲线C 上,过点A 作曲线C 的两条弦AD 和AE ,且AD ⊥AE ,判断:直线DE 是否过定点?试证明你的结论. (3)已知点A (m,2)在曲线C 上,过点A 作曲线C 的两条弦AD ,AE ,且AD ,AE 的斜率k 1、k 2满足k 1·k 2=2.求证:直线DE 过定点,并求出这个定点. 解:(1)设.4,1)1(||||),(222x y x y x CB PB BC PC y x P =+=+-?=?化简得得 代入 二、定义法 利用所学过的圆的定义、椭圆的定义、双曲线的定义、抛物线的定义直接写出所求的动点的轨迹方程,这种方法叫做定义法.这种方法要求题设中有定点与定直线及两定点距离之和或差为定值的条件,或利用平面几何知识分析得出这些条件. 1、 若动圆与圆4)2(2 2 =++y x 外切且与直线x =2相切,则动圆圆心的轨迹 方程是
求轨迹方程的常用方法例题及变式
求轨迹方程的常用方法: 题型一直接法 此法是求轨迹方程最基本的方法, 根据所满足的几何条件, 将几何条件{M | P(M )}直接翻 译成x, y 的形式f(x, y) 0 ,然后进行等价变换,化简 f (x,y) 0,要注意轨迹方程的纯 粹性和完备性,即曲线上没有坐标不满足方程的点, 也就是说曲线上所有的点适合这个条件 而毫无例外(纯粹性);反之,适合条件的所有点都在曲线上而毫无遗漏(完备性) 。 例1过点A(2,3)任作互相垂直的两直线 AM 和AN ,分别交x,y 轴于点M , N ,求线段 MN 中点P 的轨迹方程。 解:设P 点坐标为P(x, y),由中点坐标公式及M,N 在轴上得M (0,2y), AM AN k AM k AN 所以中点P 的轨迹方程为4x 6y 13 0。 变式1 已知动点M (x, y)到直线l : x 4的距离是它到点 (1) 求动点M 的轨迹C 的方程; (2) 过点P(0,3)的直线m 与轨迹C 交于A, B 两点。若A 是PB 的中点,求直线 m 的斜 率。 题型二定义法 圆锥曲线定义所包含的几何意义十分重要, 应特别重视利用圆锥曲线的定义解题, 包括用定 义法求轨迹方程。 2 2 例2 动圆M 过定点P( 4,0),且与圆C :x y 8x 0相切,求动圆圆心 M 的轨迹 方程。 解:根据题意|| MC | |MP || 4,说明点M 到定点C 、P 的距离之差的绝对值为定值, N(2x,0)(x,y R) 0 3 2y 2x 2 0 2 3 1 (x 1),化简得 4x 6y 13 0 (x 1) 当x 1时,M(0,3),N(2,0),此时MN 的中点 P(1,|)它也满足方程4x 6y 13 0, N (1,0)的距离的2倍。
曲线的轨迹方程的求法
圆锥曲线的轨迹方程的求法 高考要求 求曲线的轨迹方程是解析几何的两个基本问题之一 求符合某种条件的动点的轨迹方程,其实质就是利用题设中的几何条件,用“坐标化”将其转化为寻求变量间的关系 这类问题除了考查学生对圆锥曲线的定义,性质等基础知识的掌握,还充分考查了各种数学思想方法及一定的推理能力和运算能力,因此这类问题成为高考命题的热点,也是同学们的一大难点 重难点归纳 一、求曲线的轨迹方程常采用的方法有直接法、定义法、代入法、参数法 (1)直接法 直接法是将动点满足的几何条件或者等量关系,直接坐标化,列出等式化简即得动点轨迹方程 (2)定义法 若动点轨迹的条件符合某一基本轨迹的定义(如椭圆、双曲线、抛物线、圆等),可用定义直接探求 (3)相关点法 根据相关点所满足的方程,通过转换而求动点的轨迹方程 (4)参数法 若动点的坐标(x ,y )中的x ,y 分别随另一变量的变化而变化,我们可以以这个变量为参数,建立轨迹的参数方程 求轨迹方程,一定要注意轨迹的纯粹性和完备性 要注意区别“轨迹”与“轨迹方程”是两个不同的概念 二、跟踪应用 (1)求轨迹方程的步骤:建系、设点、列式、化简、确定点的范围; (2)求轨迹方程的常用方法: ①直接法:直接利用条件建立,x y 之间的关系(,)0F x y =;如已知动点P 到定点F(1,0) 和直线3=x 的距离之和等于4,求P 的轨迹方程.(答:2 12(4)(34)y x x =--≤≤或 24(03)y x x =≤<); ②待定系数法:已知所求曲线的类型,求曲线方程――先根据条件设出所求曲线的方程,再由条件确定其待定系数。如线段AB 过x 轴正半轴上一点M (m ,0))0(>m ,端点A 、B 到x 轴距离之积为2m ,以x 轴为对称轴,过A 、O 、B 三点作抛物线,则此抛物线方程为 (答:2 2y x =); ③定义法:先根据条件得出动点的轨迹是某种已知曲线,再由曲线的定义直接写出动点的轨迹方程;如(1)由动点P 向圆22 1x y +=作两条切线PA 、PB ,切点分别为A 、B ,∠APB=600 , 则动点P 的轨迹方程为 (答:22 4x y +=);(2)点M 与点F(4,0) 的距离比它到直线05=+x l :的距离小于1,则点M 的轨迹方程是_______ (答:2 16y x =);(3) 一动圆与两圆⊙M :12 2 =+y x 和⊙N :01282 2=+-+x y x 都外切,则动圆圆心的轨迹为 (答:双曲线的一支); ④代入转移法:动点(,)P x y 依赖于另一动点00(,)Q x y 的变化而变化,并且00(,)Q x y 又在某已知曲线上,则可先用,x y 的代数式表示00,x y ,再将00,x y 代入已知曲线得要求的轨迹方程;如动点P 是抛物线122 +=x y 上任一点,定点为)1,0(-A ,点M 分?→ ?PA 所成的比 为2,则M 的轨迹方程为__________(答:3 1 62-=x y ); ⑤参数法:当动点(,)P x y 坐标之间的关系不易直接找到,也没有相关动点可用时,可考虑将,x y 均用一中间变量(参数)表示,得参数方程,再消去参数得普通方程)。如(1)AB 是圆O 的直径,且|AB|=2a ,M 为圆上一动点,作MN ⊥AB ,垂足为N ,在OM 上取点P , 使||||OP MN =,求点P 的轨迹。(答:2 2 ||x y a y +=);(2)若点),(11y x P 在圆1 2 2=+y x
轨迹方程的五种求法例题
动点轨迹方程的求法 一、直接法 按求动点轨迹方程的一般步骤求,其过程是建系设点,列出几何等式,坐标代换,化简整理,主要用于动点具有的几何条件比较明显时. 例1已知直角坐标平面上点Q (2,0)和圆C :,动点M 到圆C 的切线长与的比等于常数(如图),求动点M 的轨迹方程,说明它表示什么曲线. 【解析】:设M (x ,y ),直线MN 切圆C 于N ,则有 ,即 , .整理得,这就是动点 M 的轨迹方程.若,方程化为,它表示过点和x 轴垂直的一条直线;若λ≠1,方程化为,它表示以为圆心,为半径的圆. 二、代入法 若动点M (x ,y )依赖已知曲线上的动点N 而运动,则可将转化后的动点N 的坐标入已知曲线的方程或满足的几何条件,从而求得动点M 的轨迹方程,此法称为代入法,一般用于两个或两个以上动点的情况. 例2 已知抛物线,定点A (3,1),B 为抛物线上任意一点,点P 在线段AB 上,且有BP :PA =1:2,当点B 在抛物线上变动时,求点P 的轨迹方程,并指出这个轨迹为哪种曲线. 【解析】:设,由题设,P 分线段AB 的比,∴ 解得.又点B 在抛物线上,其坐标适合抛物线方程,∴ 整理得点P 的轨迹方程为其轨迹为抛物线. 三、定义法 若动点运动的规律满足某种曲线的定义,则可根据曲线的定义直接写出动点的轨迹方程.此法一般用于求圆锥曲线的方程,在高考中常填空、选择题的形式出现. 例3 若动圆与圆外切且与直线x =2相切,则动圆圆心的轨迹方程是 12 2 =+y x MQ ()0>λλλ=MQ MN λ=-MQ ON MO 2 2λ=+--+2 222)2(1y x y x 0)41(4)1()1(222222=++--+-λλλλx y x 1=λ45= x )0,4 5 (2 222 222)1(3112-+=+-λλλλy x )-()0,12(2 2-λλ1 3122-+λλ12 +=x y ),(),,(11y x B y x P 2== PB AP λ.2121,212311++=++= y y x x 2 1 23,232311-=-=y y x x 12+=x y .1)2 3 23()2123( 2+-=-x y ),3 1 (32)31(2-=-x y 4)2(2 2 =++y x
求曲线轨迹方程的常用方法
高考数学专题:求曲线轨迹方程的常用方法 昕 省潼关县潼关高级中学 714399 求曲线的轨迹方程,其实质就是利用题设中的几何条件,用“坐标化”将其转化为寻求变量间的关系.这类问题除了考查考生对曲线的定义、性质等基础知识的掌握,还充分考查了各种数学思想方法及一定的推理能力和运算能力.因此要分析轨迹的动点和已知条件的在联系,选择最便于反映这种联系的形式建立等式.其常见方法如下:(1)直接法:直接法就是将动点满足的几何条件或者等量关系,直接坐标化,列出等式化简即得动点轨迹方程,这种求轨迹方程 的方法就称为直接法,直接法求轨迹经常要联系平面图形的性 质. (2)定义法:若动点轨迹的条件符合某一基本轨迹的定义(如椭圆、双曲线、抛物线、圆等),可以设出其标准方程,然后用待定系 数法求解.这种求轨迹方程的方法称为定义法,利用定义法求方 程要善于抓住曲线的定义特征. (3)代入法:根据相关点所满足的方程,通过转换而求动点的轨迹方程.这就叫代入法. (4)参数法:若动点的坐标(x,y)中的x,y分别随另一变量的变化而变化,我们可以以这个变量为参数,建立轨迹的参数方 程,消去参数来求轨迹方程. (5)几何法:根据曲线的某种几何性质和特征,通过推理列出等式求轨迹方程,这种求轨迹的方法叫做几何法.
(6) 交轨法:在求动点轨迹方程时,经常遇到求两动曲线的交点轨 迹方程问题,我们列出两动曲线的方程再设法消去曲线中的参数即可得到交点的轨迹方程. 典型例题示讲解: 设圆C :22(1)1x y -+=,过原点作圆的弦0A ,求OA 中点B 的轨迹方程. 【解】:法一:(直接法) 如图,设B (x ,y ),由题得2OB +2BC =2OC , 即x 2+y 2 +[22(1)x y -+]=1 即OA 中点B 的轨迹方程为2211()24 x y -+= (x ≠0). 法二:(定义法) 设B (x ,y ),如上图,因为B 是OA 的中点 所以∠OBC= 90?, 则B 在以OC 为直径的圆上, 故B 点的轨迹方程是2211()24 x y -+=(x ≠0). 法三:(代入法) 设A (1x ,1y ),B (x ,y ),
轨迹规划分类及算法
路径规划的分类: 一、按路径维数 根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。 二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。 二、按路径形式 根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。 三、按规划方向 由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。 四、按规划算法 路径规划按算法大体可分为数值法、搜索法和反解法三大类。 五、算法概述 (一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方 法。 1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。 2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目 标函数得到最优解。 (二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。 1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个 网络之中,即将路径规划问题转化成图的搜索问题。 i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley 于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境 空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对 应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。
圆锥曲线中的轨迹方程(带答案)
第六讲 求轨迹方程的六种常用技法 1.直接法 根据已知条件及一些基本公式如两点间距离公式,点到直线的距离公式,直线的斜率公式等,直接列出动点满足的等量关系式,从而求得轨迹方程。 例1.已知线段6=AB ,直线BM AM ,相交于M ,且它们的斜率之积是 4 9 ,求点M 的轨迹方程。 练习: 1.平面内动点P 到点(10,0)F 的距离与到直线4x =的距离之比为2,则点P 的轨迹方程是 。 2.设动直线l 垂直于x 轴,且与椭圆2 2 24x y +=交于A 、B 两点,P 是l 上满足1PA PB ?=的点,求点P 的轨迹方程。 3. 到两互相垂直的异面直线的距离相等的点,在过其中一条直线且平行于另一条直线的平面内的轨迹是 ( ) A .直线 B .椭圆 C .抛物线 D .双曲线 2.定义法 通过图形的几何性质判断动点的轨迹是何种图形,再求其轨迹方程,这种方法叫做定义法,运用定义法,求其轨迹,一要熟练掌握常用轨迹的定义,如线段的垂直平分线,圆、椭圆、双曲线、抛物线等,二是熟练掌握平面几何的一些性质定理。 例2.若(8,0),(8,0)B C -为ABC ?的两顶点,AC 和AB 两边上的中线长之和是30,则ABC ?的重 心轨迹方程是_______________。 练习: 4.方程|2|x y ++表示的曲线是 ( ) A .椭圆 B .双曲线 C .线段 D .抛物线
3.点差法 圆锥曲线中与弦的中点有关的问题可用点差法,其基本方法是把弦的两端点1122(,),(,)A x y B x y 的坐标代入圆锥曲线方程,然而相减,利用平方差公式可得12x x +,12y y +,12x x -,12y y -等关系式,由于弦AB 的中点(,)P x y 的坐标满足122x x x =+, 122y y y =+且直线AB 的斜率为 21 21 y y x x --,由此可求得弦AB 中点的轨迹方程。 例3.椭圆22 142 x y +=中,过(1,1)P 的弦恰被P 点平分,则该弦所在直线方程为_________________。 练习: 5.已知以(2,2)P 为圆心的圆与椭圆2 2 2x y m +=交于A 、B 两点,求弦AB 的中点M 的轨迹方程。 6.已知双曲线2 2 12 y x -=,过点(1,1)P 能否作一条直线l 与双曲线交于,A B 两点,使P 为线段AB 的中点? 4.转移法 转移法求曲线方程时一般有两个动点,一个是主动的,另一个是次动的。 当题目中的条件同时具有以下特征时,一般可以用转移法求其轨迹方程: ①某个动点P 在已知方程的曲线上移动; ②另一个动点M 随P 的变化而变化; ③在变化过程中P 和M 满足一定的规律。
【人教A版高中数学选修2-1教案 】《2.1.1曲线与方程2.1.2求曲线的轨迹方程》教案
《2.1.1曲线与方程2.1.2求曲线的轨迹方程》教案 一、教学目标: 1.知识教学点 使学生掌握常用动点的轨迹以及求动点轨迹方程的常用技巧与方法.(二)能力训练点通过对求轨迹方程的常用技巧与方法的归纳和介绍,培养学生综合运用各方面知识的能力.2.学科渗透点 通过对求轨迹方程的常用技巧与方法的介绍,使学生掌握常用动点的轨迹,为学习物理等学科打下扎实的基础. 二、教材分析: 1.重点:求动点的轨迹方程的常用技巧与方法. (解决办法:对每种方法用例题加以说明,使学生掌握这种方法.) 2.难点:作相关点法求动点的轨迹方法. (解决办法:先使学生了解相关点法的思路,再用例题进行讲解.) 三、教具准备:与教材内容相关的资料。 四、教学设想:激发学生的学习热情,激发学生的求知欲,培养严谨的学习态度,培养积 极进取的精神. 五、教学过程: 学生探究过程: (一)复习引入 大家知道,平面解析几何研究的主要问题是: (1)根据已知条件,求出表示平面曲线的方程; (2)通过方程,研究平面曲线的性质. 我们已经对常见曲线圆、椭圆、双曲线以及抛物线进行过这两个方面的研究,今天在上面已经研究的基础上来对根据已知条件求曲线的轨迹方程的常见技巧与方法进行系统分析.(二)几种常见求轨迹方程的方法 1.直接法 由题设所给(或通过分析图形的几何性质而得出)的动点所满足的几何条件列出等式,再用坐标代替这等式,化简得曲线的方程,这种方法叫直接法. 例1(1)求和定圆x2+y2=k2的圆周的距离等于k的动点P的轨迹方程;
(2)过点A(a,o)作圆O∶x2+y2=R2(a>R>o)的割线,求割线被圆O截得弦的中点的轨迹.对(1)分析: 动点P的轨迹是不知道的,不能考查其几何特征,但是给出了动点P的运动规律:|OP|=2R 或|OP|=0. 解:设动点P(x,y),则有|OP|=2R或|OP|=0. 即x2+y2=4R2或x2+y2=0. 故所求动点P的轨迹方程为x2+y2=4R2或x2+y2=0. 对(2)分析: 题设中没有具体给出动点所满足的几何条件,但可以通过分析图形的几何性质而得出,即圆心与弦的中点连线垂直于弦,它们的斜率互为负倒数.由学生演板完成,解答为: 设弦的中点为M(x,y),连结OM, 则OM⊥AM. ∵kOM·kAM=-1, 其轨迹是以OA为直径的圆在圆O内的一段弧(不含端点). 2.定义法 利用所学过的圆的定义、椭圆的定义、双曲线的定义、抛物线的定义直接写出所求的动点的轨迹方程,这种方法叫做定义法.这种方法要求题设中有定点与定直线及两定点距离之和或差为定值的条件,或利用平面几何知识分析得出这些条件. 直平分线l交半径OQ于点P(见图2-45),当Q点在圆周上运动时,求点P的轨迹方程.
求曲线轨迹方程的五种方法
求曲线轨迹方程的五种 方法 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
求曲线轨迹方程的五种方法 一、直接法 如果题目中的条件有明显的等量关系,或者可以利用平面几何知识推出等量关系,求方程时可用直接法。 例1 长为2a的线段AB的两个端点分别在x轴、y轴上滑动,求AB中点P的轨迹方程。 解:设点P的坐标为(x,y), 则A(2x,0),B(0,2y),由|AB|=2a得 2) 2 x- 2(y + -=2a 2 0( )0 化简得x2+y2=a,即为所求轨迹方程 点评:本题中存在几何等式|AB|=2a,故可用直接法解之。 二、定义法 如果能够确立动点的轨迹满足某种已知曲线的定义,则可用曲线定义写出方程,这种方法称为定义法。 例2 动点P到直线x+4=0的距离减去它到M(2,0)的距离之差等于2,则点P的轨迹是() A、直线 B、椭圆 C、双曲线 D、抛物线 解法一:由题意,动点P到点M(2,0)的距离等于这点到直线x=-2的距离,因此动点P的轨迹是抛物线,故选D。 解法二:设P点坐标为(x,y),则 |x+4|-2 2 -=2 x+ (y )2
当x ≥-4时,x+4-22)2(y x +-=2化简得 当时,y 2=8x 当x <-4时,-x-4-22)2(y x +-=2无解 所以P 点轨迹是抛物线y 2=8x 点评:解法一与解法二分别用定义法和直接法求轨迹方程,明显,解法一优于后一种解法,对于有些求轨迹方程的题目,若能采用定义法,则优先采用定义法,它能大量地简化计算。 三、 代入法 如果轨迹点P (x ,y )依赖于另一动点Q (a ,b ),而Q (a ,b )又在某已知曲线上,则可先列出关于x 、y 、a 、b 的方程组,利用x 、y 表示出a 、b ,把a 、b 代入已知曲线方程便得动点P 的轨迹方程,此法称为代入法。 例3 P 在以F 1、F 2为焦点的双曲线19 1622=-y x 上运动,则△F 1F 2P 的重心G 的轨迹方程是 。 解:设P (x 0,y 0),G (x ,y ),则有 ??? ????++=+-=)00(31)4(3100y y x x x 即???==y y x x 3300,代入 191622=-y x 得19 91692 2=-y x 即116 922 =-y x 由于G 不在F 1F 2上,所以y ≠0