DeltaV控制系统中PID不同联锁类型的应用实现

DeltaV控制系统中PID不同联锁类型的应用实现
The application for different interlock types of PID algorithm in Deltav control system
胡正何光宇王建
Hu, Zheng He, Guangyu Wang, Jian
[摘要]: 本文介绍了DeltaV控制系统中PID不同联锁类型的应用实现。并根据某工厂生产实际中三种不同联锁类型的要求,应用DeltaV系统提供的多种功能模块,搭建相应的控制策略以满足过程控制的需要。
关键词:DeltaV控制系统;PID;联锁;功能模块
分类号:TP 273 文献标识码:A
[Abstract]: The paper introduced the application for different interlock types of PID algorithm in Deltav control system. And according to the three different interlock types in producing control of a factory, with some function blocks the DeltaV system provided, building the relative control algorithm to meet the needs of process control.
Keywords: Deltav control system; PID; interlock; function block
引言
DeltaV系统是以WindowsNT 4.0为开发平台, 以控制网络为基本框架, 以现场总线标准为基础的规模可变的控制系统。
在工厂自动化控制过程中,对于高温、高压、易燃、易爆等连续性生产装置有很高可靠性要求,应用联锁控制正是为对可能发生的危险或将继续恶化的状态进行及时响应和保护,将危险降至较低程度。
一.PID联锁类型要求
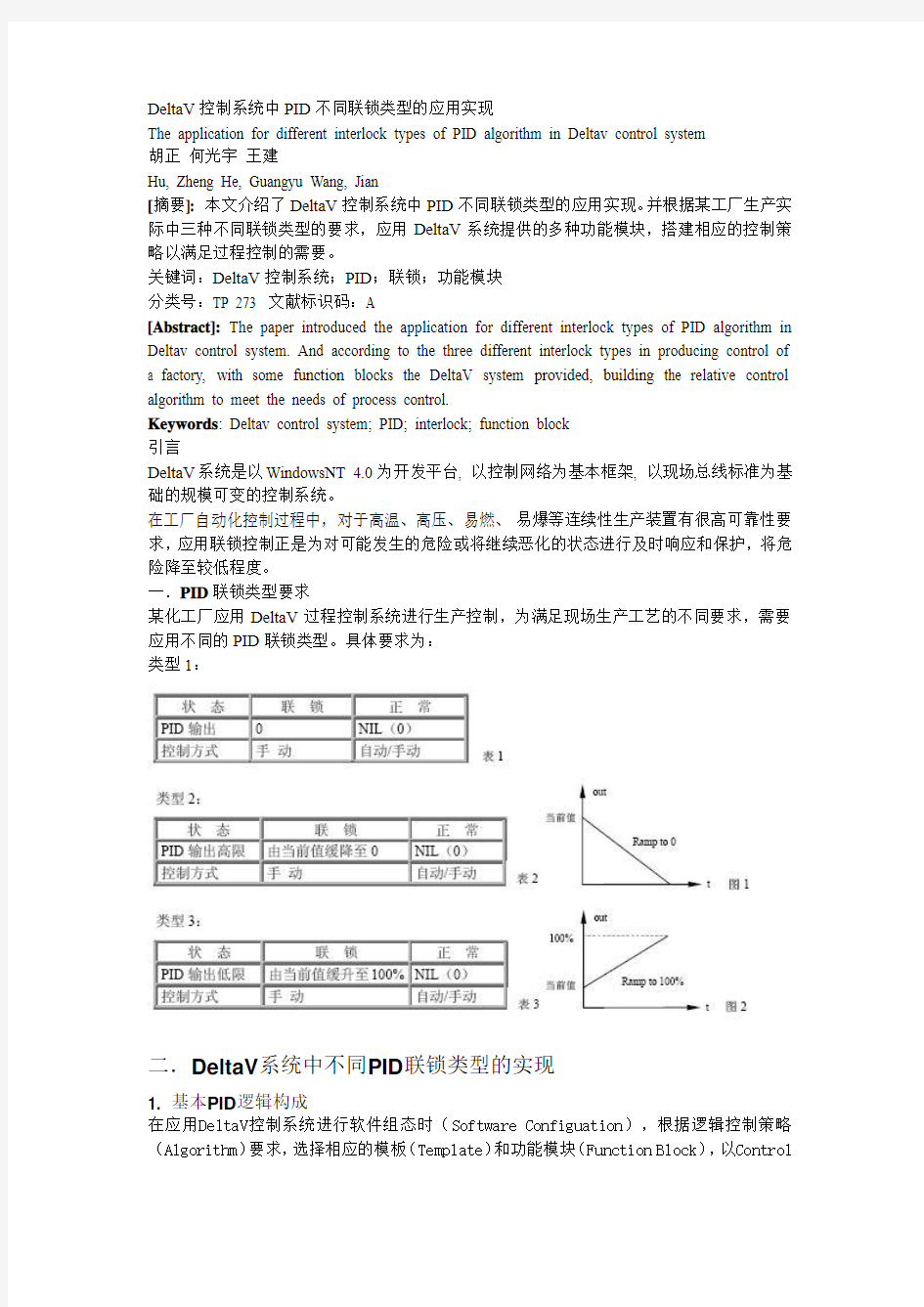
某化工厂应用DeltaV过程控制系统进行生产控制,为满足现场生产工艺的不同要求,需要应用不同的PID联锁类型。具体要求为:
类型1:
二.DeltaV系统中不同PID联锁类型的实现
1. 基本PID逻辑构成
在应用DeltaV控制系统进行软件组态时(Software Configuation),根据逻辑控制策略(Algorithm)要求,选择相应的模板(Template)和功能模块(Function Block),以Control
Stadio方式打开进行组态。
如图3所示,基本PID模板一般由模拟输入AI,模拟输出AO,PID,BF(Boolean Fan),联锁条件(CND块),动作模块(ACT)等逻辑功能模块组成。BF模块相当于逻辑或门,当其输入的任何一个联锁条件块(CND)的值为1时,其OUT_D值为1,表明有联锁发生。ACT为动作模块,当其输入为1时,将执行块内表达式(Expression)的控制语句。
2. 联锁类型1实现
对于联锁类型1,模板内不需加入斜坡模块(RAMP)和逻辑非(NOT)模块,当有联锁发生时,BF块的OUT_D值为1,使得ACT块的IN_D值和PID块的TRK_IN_D值同时为1,此时ACT块内的Expression语句为:
(* Switch to manual mode in case of interlock *)
if ( '^/PID1/MODE.TARGET' != MAN ) then
'^/PID1/MODE.TARGET' := MAN;
endif;
(* Switch output to track value in case of interlock *)
if ( '^/PID1/MODE.TARGET' = MAN ) AND( '^/PID1/OUT.CV' != '^/PID1/TRK_VAL.CV' )
then '^/PID1/OUT.CV' := '^/PID1/TRK_VAL.CV';
endif;
表明联锁发生时将PID控制目标模式强制打到手动方式,同时因为PID块TRK_IN_D有效将使得PID 块输出值跟踪TRK_VAL输入,将该值置为0即可满足类型1要求。
3. 联锁类型2、3实现
对于联锁类型2、3,需在模板中加入斜坡模块(RAMP)和逻辑非(NOT)模块,连接方式如图1。RAMP功能块相关参数介绍如下:
正常无联锁时,BF块OUT_D为0,RAMP块ENABLE端无效,TRK_IN_D有效,RAMP块OUT值直接跟踪输入端IN的值,即为PID当前输出值。
联锁产生时,BF块OUT_D为1,RAMP块ENABLE端有效,TRK_IN_D无效,开始进行斜坡计算,斜坡计算起点为PID输出当前值,根据类型要求定义计算终点END_VALUE,选择斜坡类型RAMP_TYPE,定义斜坡上升或下降率或RAMP_TIME。同时当联锁产生时,PID块TRK_IN_D 端有效,PID输出跟踪TRK_VAL值,即为RAMP块的输出值。参数设定参见表5。
联锁类型2中ACT块中Expression语句同类型1,即有联锁时将PID目标模式强制打到手动方式。
联锁类型3中ACT块中Expression语句仅保留以下部分:
(* Switch output to track value in case of interlock *)
if ( '^/PID1/MODE.TARGET' = MAN ) AND( '^/PID1/OUT.CV' != '^/PID1/TRK_VAL.CV' )
then '^/PID1/OUT.CV' := '^/PID1/TRK_VAL.CV';
endif;
即有联锁发生时保持联锁前的PID控制目标模式。
三. 小结
总之,灵活应用DeltaV控制系统中提供的多种控制功能模块搭建相应控制策略,可实现生产过程控制及工艺方面PID联锁类型的不同要求。