VB串口通信之更改波特率

VB串口通信之更改波特率
网上更改波特率的方法一般有两种:
1、在程序中设置,即:MSComm1.Settings = "9600,n,8,1"
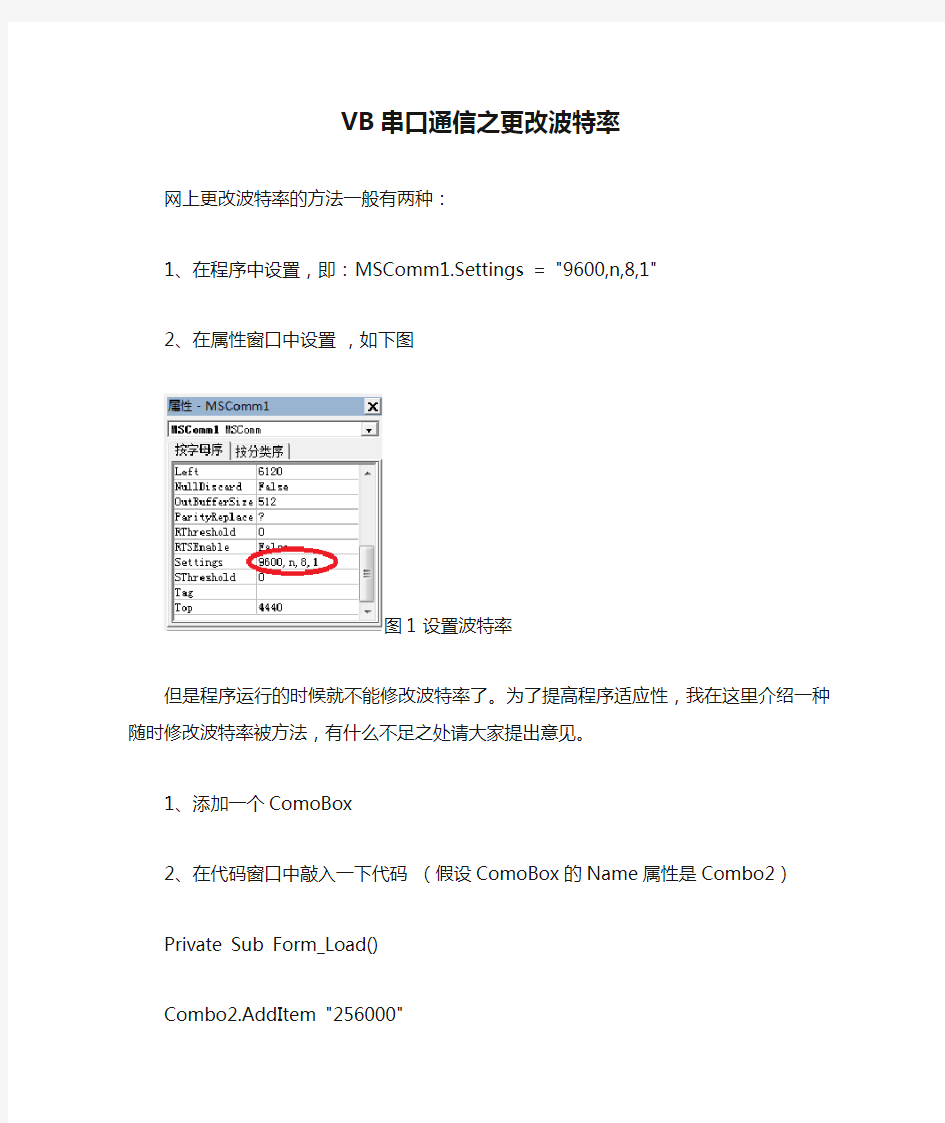
2、在属性窗口中设置,如下图
图1 设置波特率
但是程序运行的时候就不能修改波特率了。为了提高程序适应性,我在这里介绍一种随时修改波特率被方法,有什么不足之处请大家提出意见。
1、添加一个ComoBox
2、在代码窗口中敲入一下代码(假设ComoBox的Name属性是Combo2)
Private Sub Form_Load()
Combo2.AddItem "256000"
Combo2.AddItem "128000"
Combo2.AddItem "115200"
Combo2.AddItem "57600"
Combo2.AddItem "38400"
Combo2.AddItem "28800"
Combo2.AddItem "19200"
'Combo2.AddItem "14400"
'Combo2.AddItem "12800"
'Combo2.AddItem "11520"
Combo2.AddItem "9600"
Combo2.AddItem "4800"
Combo2.AddItem "2400"
Combo2.AddItem "1200"
Combo2.AddItem "600"
End Sub
Private Sub Combo2_Click()
strSettings = Combo2.Text & "," & n & "," & 8 & "," & 1
MSComm1.Settings = strSettings
End Sub
将以上程序加入你的串口通信程序里试试,波特率随时改,没问题。
串口通信协议
串口通讯—通信协议 所谓通信协议是指通信双方的一种约定。约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。 目前,采用的通信协议有两类:异步协议和同步协议。同步协议又有面向字符和面向比特以及面向字节计数三种。其中,面向字节计数的同步协议主要用于DEC公司的网络体系结构中。 一、物理接口标准 1.串行通信接口的基本任务 (1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。因此串并转换是串行接口电路的重要任务。 (3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。 (4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。 (5)进行TTL与EIA电平转换:CPU和终端均采用TTL电平及正逻辑,它们与EIA采用的电平及负逻辑不兼容,需在接口电路中进行转换。 (6)提供EIA-RS-232C接口标准所要求的信号线:远距离通信采用MODEM时,需要9根信号线;近距离零MODEM方式,只需要3根信号线。这些信号线由接口电路提供,以便与MODEM或终端进行联络与控制。 2、串行通信接口电路的组成 为了完成上述串行接口的任务,串行通信接口电路一般由可编程的串行接口芯片、波特率发生器、EIA 与TTL电平转换器以及地址译码电路组成。其中,串行接口芯片,随着大规模继承电路技术的发展,通用的同步(USRT)和异步(UART)接口芯片种类越来越多,如下表所示。它们的基本功能是类似的,都能实现上面提出的串行通信接口基本任务的大部分工作,且都是可编程的。才用这些芯片作为串行通信接口电路的核心芯片,会使电路结构比较简单。 3.有关串行通信的物理标准 为使计算机、电话以及其他通信设备互相沟通,现在,已经对串行通信建立了几个一致的概念和标准,这些概念和标准属于三个方面:传输率,电特性,信号名称和接口标准。 1、传输率:所谓传输率就是指每秒传输多少位,传输率也常叫波特率。国际上规定了一个标准波特率系列,标准波特率也是最常用的波特率,标准波特率系列为110、300、600、1200、4800、9600和19200。大多数CRT终端都能够按110到9600范围中的任何一种波特率工作。打印机由于机械速度比较慢而使传输波特率受到限制,所以,一般的串行打印机工作在110波特率,点针式打印机由于其内部有较大的行缓冲
51单片机串口通信及波特率设置
51单片机串口通信及波特率设置 MCS-51单片机具有一个全双工的串行通信接口,能同时进行发送和接收。它可以作为UART(通用异步接收和发送器)使用,也可以作为同步的移位寄存器使用。 1. 数据缓冲寄存器SBUF SBUF是可以直接寻址的专用寄存器。物理上,它对应着两个寄存器,即一个发送寄存器一个接收寄存器,CPU写SBUF就是修改发送寄存器;读SBUF就是读接收寄存器。接收器是双缓冲的,以避免在接收下一帧数据之前,CPU未能及时的响应接收器的中断,没有把上一帧的数据读走而产生两帧数据重叠的问题。对于发送器,为了保持最大的传输速率,一般不需要双缓冲,因为发送时CPU是主动的,不会产生重叠问题。 2. 状态控制寄存器SCON SCON是一个逐位定义的8位寄存器,用于控制串行通信的方式选择、接收和发送,指示串口的状态,SCON即可以字节寻址也可以位寻址,字节地址98H,地址位为98H~9FH。它的各个位定义如下: MSB LSB SM0 SM1 SM2 REN TB8 RB8 TI RI SM0和SM1是串口的工作方式选择位,2个选择位对应4种工作方式,如下表,其中Fosc是振荡器的频率。 SM0 SM1 工作方式功能波特率 0 0 0 8位同步移位寄存器Fosc/12 0 1 1 10位UART 可变 1 0 2 11位UART Fosc/64或Fosc/32 1 1 3 11位UART 可变 SM2在工作方式2和3中是多机通信的使能位。在工作方式0中,SM2必须为0。在工作方式1中,若SM2=1且没有接收到有效的停止位,则接收中断标志位RI不会被激活。在工作方式2和3中若SM2=1且接收到的第9位数据(RB8)为0,则接收中断标志RB8不会被激活,若接收到的第9位数据(RB8)为1,则RI置位。此功能可用于多处理机通信。 REN为允许串行接收位,由软件置位或清除。置位时允许串行接收,清除时禁止串行接收。 TB8是工作方式2和3要发送的第9位数据。在许多通信协议中该位是奇偶位,可以按需要由软件置位或清除。在多处理机通信中,该位用于表示是地址帧还是数据帧。 RB8是工作方式2和3中接收到的第9位数据(例如是奇偶位或者地址/数据标识位),在工作方式1中若SM2=0,则RB8是已接收的停止位。在工作方式0中RB8不使用。 TI 为发送中断标志位,由硬件置位,软件清除。工作方式0中在发送第8位末尾由硬件置位;在其他工作方式时,在发送停止位开始时由硬件置位。TI=1时,申请中断。CPU 响应中断后,发送下一帧数据。在任何工作方式中都必须由软件清除TI。 RI为接收中断标志位,由硬件置位,软件清除。工作方式0中在接收第8位末尾由硬件置位;在其他工作方式时,在接收停止位的中间由硬件置位。RI=1时,申请中断,要求CPU取走数据。但在工作方式1中,SM2=1且未接收到有效的停止位时,不会对RI置位。在任何工作方式中都必须由软件清除RI。 系统复位时,SCON的所有位都被清除。 控制寄存器PCON也是一个逐位定义的8位寄存器,目前仅仅有几位有定义,如下所示:MSB LSB
USB基本知识与通信协议书范本
串口通信协议 什么是串口 串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal SerialBus或者USB混淆)。大多数计算机包含两个基于RS232的串口。串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。同时,串口通信协议也可以用于获取远程采集设备的数据。 串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(b yte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。 典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配:a,波特率:这是一个衡量通信速度的参数。它表示每秒钟传送的bit的个数。例如300波特表示每秒钟发送300个bit。当我们提到时钟周期时,我们就是指波特率例如如果协议需要4800波特率,那么时钟是4800Hz。这意味着串口通信在数据线上的采样率为4800Hz。通常线的波特率为14400,28800和36600。波特率可以远远大于这些值,但是波特率和距离成反比。高波特率常常用于放置的很近的仪器间的通信,典型的例子就是GPIB设备的通信。 b,数据位:这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据不会是8位的,标准的值是5、7和8位。如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,术语“包”指任何通信的情况。 c,停止位:用于表示单个包的最后一位。典型的值为1,1.5和2位。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。 d,奇偶校验位:在串口通信中一种简单的检错方式。有四种检错方式:偶、奇、高和低。当然没有校验位也是可以的。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。例如,如果数据是011,那么对于偶校验,校验位为0,保证逻辑高的位数是偶数个。如果是奇
单片机串口通信C程序及应用实例
一、程序代码 #include
TI = 0; } T_counter = 0; } uart_receive(void) interrupt 4 { if(RI) { RI = 0; indata[R_counter] = SBUF; R_counter++; if(R_counter>=4) { R_counter = 0; flag = 1; } } } void system_initial(void) { P1M1 = 0x00; P1M0 = 0xff; P1 = 0xff; //初始化为全部关闭 temp3 = 0x3f;//初始化temp3的值与六路输出的初始值保持一致 temp = 0xf0; R_counter = 0; T_counter = 0; } void initial_comm(void) { SCON = 0x50; //设定串行口工作方式:mode 1 ; 8-bit UART,enable ucvr TMOD = 0x21; //TIMER 1;mode 2 ;8-Bit Reload PCON = 0x80; //波特率不加倍SMOD = 1 TH1 = 0xfa; //baud: 9600;fosc = 11.0596 IE = 0x90; // enable serial interrupt TR1 = 1; // timer 1 RI = 0; TI = 0; ES = 1; EA = 1; }
8051的串口波特率的计算(笔记版)
8051的串口波特率的计算 1、方式0的波特率,固定为晶振频率的十二分之一。 2、方式2的波特率,取决于PCON寄存器的SMOD位。PCON是一个特殊的寄 存器,吹了最高位SMOD位,其他位都是虚设的。计算方法如下: SMOD=0,波特率为晶振的1/64; SMOD=1,波特率为晶振的1/32. 3、方式1与方式3的波特率都是由定时器的溢出率决定的。 公式为: BR=(2SOMD/32)*(定时器TI的溢出率) 通常情况下,我们使用定时器的方式2,即比率发生器,自动重载计数常数。 溢出的周期为: T=(256-X)*12/fosc 溢出率为溢出周期的倒数,即 T1=1/T 所以: 式中:SMOD是所选的方式,fosc是晶振频率。X是初始值。 51单片机模拟串口波特率计算方法 1.计算波特率位间隔时间(即定时时间,其实就是波特率的倒数) 位间隔时间(us)=10(6)(us)/波特率(bps)
2.计算机单片机指令周期: 指令周期(us)=12/晶振频率(Mhz) 补充问题:做串口通信时,为什么要把晶振频率设为11.0592,为什么要把波特率设为9600? 先说波特率。波特率从300到115200都可以,甚至更高或更低。一般规范的波特率都是3的倍数,比如9600、19200、38400;但是并不是一定的,波特率也可以是10000或者10001、10002,只要你的设备能产生符合这个要求的频率,尤其是自己用时,波特率都是很随意的,没有限制。只是多数时候为了和电脑配合,波特率才规范为固定的几个值,且为了传输稳定,用9600。 用11.0592晶振的原因是51单片机的定时器导致的。通常用11.0592M晶振是为了得到标准的无误差的波特率。举例说来,如我们要得到的9600的波特率,晶振为11.0592M和12M,定制器1为2SMOD设为1,分别看看那所求的TH1为何值。代入公式: 11.0592M 9600=(2/32)*((11.0592M/12)(256-TH1)) TH 1=250 12M 9600=(2/32)*((12M/12)(256-TH1)) TH1=249.49
AB DF1串口通讯协议API接口
Fax: 1-703-709-0985 https://www.360docs.net/doc/b39900820.html, Allen-Bradley DF1 Serial Communication Interface API The DASTEC Corporation Allen-Bradley DF1 Serial Communication Interface API allows the user to implement bi-directional serial communications to exchange data between applications running on a Windows/WinCE-based system with other devices supporting the Allen-Bradley DF1 full-duplex serial protocol. The devices can be AB devices, other host computers or even other system applications using the API. The Allen-Bradley DF1 Serial Communication Interface API enables a system to acts as a client device to other Allen-Bradley peer devices, initiating read and write operations on behalf of the system applications. The API also allows the system to emulate an Allen-Bradley PLC to respond to read and write requests and thus acts as a “virtual PLC” to other AB peers. The API is available for different Windows/WinCE-based systems/platforms and can be used with C/C++ or Visual Basic. The API consists of two component functionalities, client side and server side. The client side functionality is implemented with a single API DLL. Server side functionality is implemented with a DLL/executable pair. Together these components manage all aspects of the protocol and data exchange including responding to peers with proper acknowledgements, error/success codes and protocol data byte ordering. The system application need only to deal with the data values exchanged in native byte order. The user can employ either the API’s client, server or both functionalities with minimal code implementation.
MSP430串口波特率的设置与计算
MSP430波特率的计算 给定一个BRCLK时钟源,波特率用来决定需要分频的因子N: N = fBRCLK/Baudrate 分频因子N通常是非整数值,因此至少一个分频器和一个调制阶段用来尽可能的接近N。 如果N等于或大于16,可以设置UCOS16选择oversampling baud Rate模式注:Round():指四舍五入。 Low-Frequency Baud Rate Mode Setting 在low-frequency mode,整数部分的因子可以由预分频实现: UCBRx = INT(N) 小数部分的因子可以用下列标称公式通过调制器实现: UCBRSx = round( ( N –INT(N) ) × 8 ) 增加或减少UCBRSx一个计数设置,对于任何给定的位可能得到一个较低的最高比特误码率。如果确定是这样的情况UCBRSx设置的每一位必须执行一个精确的错误计算。 例1:1048576Hz频率下驱动以115200波特率异步通讯 ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz。 N = fBRCLK/Baudrate = 1048576/115200 = ~9.10 UCBRx = INT(N) = INT(9.10) = 9 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 9.10 –9) × 8 )=round(0.8 )=1 UCA0CTL1 |= UCSSEL_2;// 选SMCLK为时钟 UCAxBR0 = 9; UCAxBR1 = 0; UCAxMCTL = 0x02;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx 为寄存器UCAxMCTL的1-3位,所以写入0x02(00000010) 例2:32768Hz频率下驱动以2400波特率异步通ACLK = REFO = ~32768Hz, MCLK = SMCLK = DCO ~1.045MHz N = fBRCLK/Baudrate = 32768/2400 = ~13.65 UCBRx = INT(N) = INT(13.65) = 13 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 13.65 –13) × 8 )=round(5.2)=5 UCA0CTL1 |= UCSSEL_1; // 选ACLK为时钟 UCAxBR0 = 13;UCAxBR1 = 0 ; UCAxMCTL = 0x0A;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx为寄存器UCAxMCTL的1-3位,所以写入0x0A(00001010) Oversampling Baud Rate Mode Setting 在oversampling mode 与分频器设置如下:
Qt编写串口通信程序
Qt编写串口通信程序图文详解 (说明:我们的编程环境是windows xp下,在Qt Creator中进行,如果在Linux下或直接用源码编写,程序稍有不同,请自己改动。) 在Qt中并没有特定的串口控制类,现在大部分人使用的是第三方写的qextserialport类,我们这里也是使用的该类。我们可以去 https://www.360docs.net/doc/b39900820.html,/projects/qextserialport/files/ 进行下载,也可以去下载我上传到网上的: https://www.360docs.net/doc/b39900820.html,/bbs/read.php?tid=22847 下载到的文件为:qextserialport-1.2win-alpha.zip 其内容如下图: 我们在windows下只需要使用其中的6个文件: qextserialbase.cpp和qextserialbase.h,qextserialport.cpp和qextserialport.h,win_qextseri alport.cpp和win_qextserialport.h 如果在Linux下只需将win_qextserialport.cpp和win_qextserialport.h 换为posix_qextserialpo rt.cpp和posix_qextserialport.h即可。 第一部分: 下面我们将讲述编程的详细过程,这里我们先给出完整的程序,然后到第二部分再进行逐句分析。 1.打开Qt Creator,新建Qt4 Gui Application,工程名设置为mycom,其他使用默认选项。(注意:建立的工程路径不能有中文。) 2.将上面所说的6个文件复制到工程文件夹下,如下图。
串口通讯—传输速率与传输距离
串口通讯—传输速率与传输距离 1.波特率 在串行通信中,用“波特率”来描述数据的传输速率。所谓波特率,即每秒钟传送的二进制位数,其单位为bps(bits per second)。它是衡量串行数据速度快慢的重要指标。有时也用“位周期”来表示传输速率,位周期是波特率的倒数。国际上规定了一个标准波特率系列:110、300、600、1200、1800、2400、4800、9600、14.4Kbps、19.2Kbps、28.8Kbps、33.6Kbps、56Kbps。例如:9600bps,指每秒传送9600位,包含字符的数位和其它必须的数位,如奇偶校验位等。大多数串行接口电路的接收波特率和发送波特率可以分别设置,但接收方的接收波特率必须与发送方的发送波特率相同。通信线上所传输的字符数据(代码)是逐为位传送的,1个字符由若干位组成,因此每秒钟所传输的字符数(字符速率)和波特率是两种概念。在串行通信中,所说的传输速率是指波特率,而不是指字符速率,它们两者的关系是:假如在异步串行通信中,传送一个字符,包括12位(其中有一个起始位,8个数据位,2 个停止位),其传输速率是1200b/s,每秒所能传送的字符数是1200/(1+8+1+2)=100个。 2.发送/接收时钟 在串行传输过程中,二进制数据序列是以数字信号波形的形式出现的,如何对这些数字波形定时发送出去或接收进来,以及如何对发/收双方之间的数据传输进行同步控制的问题就引出了发送/接收时钟的应用。 在发送数据时,发送器在发送时钟(下降沿)作用下将发送移位寄存器的数据按串行移位输出;在接收数据时,接收器在接收时钟(上升盐)作用下对来自通信线上串行数据,按位串行移入移位寄存器。可见,发送/接收时钟是对数字波形的每一位进行移位操作,因此,从这个意义上来讲,发送/接收时钟又可叫做移位始终脉冲。另外,从数据传输过程中,收方进行同步检测的角度来看,接收时钟成为收方保证正确接收数据的重要工具。为此,接收器采用比波特率更高频率的时钟来提高定位采样的分辨能力和抗干扰能力。 3. 波特率因子 在波特率指定后,输入移位寄存器/输出移位寄存器在接收时钟/发送时钟控制下,按指定的波特率速度进行移位。一般几个时钟脉冲移位一次。要求:接收时钟/发送时钟是波特率的16、32或64倍。波特率因子就是发送/接收1个数据(1个数据位)所需要的时钟脉冲个数,其单位是个/位。如波特率因子为16,则16个时钟脉冲移位1次。例:波特率=9600bps,波特率因子=32,则接收时钟和发送时钟频率=9600×32=297200Hz。 4.传输距离 串行通信中,数据位信号流在信号线上传输时,要引起畸变,畸变的大小与以下因素有关: 波特率——信号线的特征(频带范围)
串口通讯协议
串口通讯协议 波特率9600,数据位8位,起始位1位,停止位2位,校验采用16位CRC校验,校验包括头部信息和数据。 帧定义: 主机发送事件数据定义
u16 const crc_table[256] = { 0x0000U, 0x1021U, 0x2042U, 0x3063U, 0x4084U, 0x50a5U, 0x60c6U, 0x70e7U, 0x8108U, 0x9129U, 0xa14aU, 0xb16bU, 0xc18cU, 0xd1adU, 0xe1ceU, 0xf1efU, 0x1231U, 0x0210U, 0x3273U, 0x2252U, 0x52b5U, 0x4294U, 0x72f7U, 0x62d6U, 0x9339U, 0x8318U, 0xb37bU, 0xa35aU, 0xd3bdU, 0xc39cU, 0xf3ffU, 0xe3deU, 0x2462U, 0x3443U, 0x0420U, 0x1401U, 0x64e6U, 0x74c7U, 0x44a4U, 0x5485U, 0xa56aU, 0xb54bU, 0x8528U, 0x9509U, 0xe5eeU, 0xf5cfU, 0xc5acU, 0xd58dU, 0x3653U, 0x2672U, 0x1611U, 0x0630U, 0x76d7U, 0x66f6U, 0x5695U, 0x46b4U, 0xb75bU, 0xa77aU, 0x9719U, 0x8738U, 0xf7dfU, 0xe7feU, 0xd79dU, 0xc7bcU, 0x48c4U, 0x58e5U, 0x6886U, 0x78a7U, 0x0840U, 0x1861U, 0x2802U, 0x3823U, 0xc9ccU, 0xd9edU, 0xe98eU, 0xf9afU, 0x8948U, 0x9969U, 0xa90aU, 0xb92bU, 0x5af5U, 0x4ad4U, 0x7ab7U, 0x6a96U, 0x1a71U, 0x0a50U, 0x3a33U, 0x2a12U, 0xdbfdU, 0xcbdcU, 0xfbbfU, 0xeb9eU, 0x9b79U, 0x8b58U, 0xbb3bU, 0xab1aU, 0x6ca6U, 0x7c87U, 0x4ce4U, 0x5cc5U, 0x2c22U, 0x3c03U, 0x0c60U, 0x1c41U, 0xedaeU, 0xfd8fU, 0xcdecU, 0xddcdU, 0xad2aU, 0xbd0bU, 0x8d68U, 0x9d49U, 0x7e97U, 0x6eb6U, 0x5ed5U, 0x4ef4U, 0x3e13U, 0x2e32U, 0x1e51U, 0x0e70U, 0xff9fU, 0xefbeU, 0xdfddU, 0xcffcU, 0xbf1bU, 0xaf3aU, 0x9f59U, 0x8f78U, 0x9188U, 0x81a9U, 0xb1caU, 0xa1ebU, 0xd10cU, 0xc12dU, 0xf14eU, 0xe16fU, 0x1080U, 0x00a1U, 0x30c2U, 0x20e3U, 0x5004U, 0x4025U, 0x7046U, 0x6067U, 0x83b9U, 0x9398U, 0xa3fbU, 0xb3daU, 0xc33dU, 0xd31cU, 0xe37fU, 0xf35eU, 0x02b1U, 0x1290U, 0x22f3U, 0x32d2U, 0x4235U, 0x5214U, 0x6277U, 0x7256U, 0xb5eaU, 0xa5cbU, 0x95a8U, 0x8589U, 0xf56eU, 0xe54fU, 0xd52cU, 0xc50dU, 0x34e2U, 0x24c3U, 0x14a0U, 0x0481U, 0x7466U, 0x6447U, 0x5424U, 0x4405U, 0xa7dbU, 0xb7faU, 0x8799U, 0x97b8U, 0xe75fU, 0xf77eU, 0xc71dU, 0xd73cU, 0x26d3U, 0x36f2U, 0x0691U, 0x16b0U, 0x6657U, 0x7676U, 0x4615U, 0x5634U, 0xd94cU, 0xc96dU, 0xf90eU, 0xe92fU, 0x99c8U, 0x89e9U, 0xb98aU, 0xa9abU, 0x5844U, 0x4865U, 0x7806U, 0x6827U, 0x18c0U, 0x08e1U, 0x3882U, 0x28a3U, 0xcb7dU, 0xdb5cU, 0xeb3fU, 0xfb1eU, 0x8bf9U, 0x9bd8U, 0xabbbU, 0xbb9aU, 0x4a75U, 0x5a54U, 0x6a37U, 0x7a16U, 0x0af1U, 0x1ad0U, 0x2ab3U, 0x3a92U, 0xfd2eU, 0xed0fU, 0xdd6cU, 0xcd4dU, 0xbdaaU, 0xad8bU, 0x9de8U, 0x8dc9U, 0x7c26U, 0x6c07U, 0x5c64U, 0x4c45U, 0x3ca2U, 0x2c83U, 0x1ce0U, 0x0cc1U, 0xef1fU, 0xff3eU, 0xcf5dU, 0xdf7cU, 0xaf9bU, 0xbfbaU, 0x8fd9U, 0x9ff8U, 0x6e17U, 0x7e36U, 0x4e55U, 0x5e74U, 0x2e93U, 0x3eb2U, 0x0ed1U, 0x1ef0U }; u16 crc16(u16 crc,const u8 *data, u32 len )len可以为u8,u16,u32 { while (len--) crc = crc_table[(crc >> 8 ^ *(data++)) & 0xffU] ^ (crc << 8); return crc; } 例:u8 *buf=”123456789”;
java串口通讯程序
java串口通讯程序 1、下载java Communications api开发包。| 是Sun公司提供的,用于开发平台独立的通讯应用程序的扩展API。 2、将拷贝入C:\j2sdk1.4.2_04\bin 3、将拷贝入C:\j2sdk1.4.2_04\jre\lib\ext 4、将拷贝入C:\j2sdk1.4.2_04\jre\lib 5、编译文件 import .*; import .*; import .*; public class CommTest{ public static void main(String[] args){ SerialPort serialPort=null; DataOutputStream doutput=null; InputStream inputStream; CommPortIdentifier portId=null; String messageString="hello \n"; try{ portId=("COM1"); }catch(NoSuchPortException ne) { "ne"); (); } try{ serialPort=(SerialPort) ("TestComm", 5); OutputStream output = (); doutput=new DataOutputStream(output); inputStream = (); }catch(PortInUseException ex) { "ex"); (); }catch(IOException ie) { "ie"); (); //(); } try { (9600, , , ; } catch (UnsupportedCommOperationException e) {} } try { ()); } catch (IOException e) {}
STM32单片机的串口通信波特率计算方法
STM32单片机的串口通信波特率计算方法 1. 什么是波特率 不管是什么单片机,在使用串口通信的时候,有一个非常重要的参数:波特率。什么是波特率:波特率就是每秒传送的字节数。双方在传输数据的过程中,波特率一致,这是通讯成功的基本保障。下面以STM32单片机为例,讲解一下串口波特率的计算方法。 2. STM32波特率相关的寄存器 STM32单片机设置波特率的寄存器只有一个:USART_BRR寄存器,如下图所示。 该寄存器的有效位数为16位,前4位用于存放小数部分,后12位用于存放整数部分。将波特率算出来后,数值填入这个波特率就可以了。下面介绍如何计算。 3. 波特率计算方法 STM32的数据手册给出了计算方法,有一个公式,如下图所示: 在这个公式上,共有三个变量,其中两个我们是知道的,Fck和Tx/Rx波特率这两个是已知的,USARTDIV是未知的。通过该公式的描述可以看出如果使用USART1的话,那Fck 就是PCLK2=72MHz,否则就是PCLK1=36MHz,Tx/Rx波特率这个参数是已知的。只需要计算出USARTDIV的值赋值给USART_BRR寄存器就可以了。以115200为例,将公式变形后得到:USARTDIV = 72×1000000/(16×115200) = 39.0625。即将39.0625写入USART_BRR即可。 前文说过,USART_BRR的前4位存放小数部分,后12位存放整数部分。 那小数部分DIV_Fraction = 0.0625×16 = 1 = 0x01;那整数部分DIV_Mantissa = 39 = 0x27;那USART_BRR = 0X271; 数据手册给我们提供了一张数据表: 在这张数据表上,已经算出了常用的波特率值,我们可以拿来直接用。但是如果我们想把
串口通讯—通信协议
串口通讯—串口通信协议 所谓通信协议是指通信双方的一种约定。约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。 目前,串口通信协议通常有两类:异步协议和同步协议。同步协议又有面向字符和面向比特以及面向字节计数三种。其中,面向字节计数的同步协议主要用于DEC公司的网络体系结构中。 一、物理接口标准 1、串行通信接口的基本任务 (1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。因此串并转换是串行接口电路的重要任务。 (3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。 (4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。 (5)进行TTL与EIA电平转换:CPU和终端均采用TTL电平及正逻辑,它们与EIA采用的电平及负逻辑不兼容,需在接口电路中进行转换。 (6)提供EIA-RS-232C接口标准所要求的信号线:远距离通信采用MODEM 时,需要9根信号线;近距离零MODEM方式,只需要3根信号线。这些信号线由接口电路提供,以便与MODEM或终端进行联络与控制。 2、串行通信接口电路的组成 为了完成上述串行接口的任务,串行通信接口电路一般由可编程的串行接口芯片、波特率发生器、EIA与TTL电平转换器以及地址译码电路组成。其中,串行接口芯片,随着大规模继承电路技术的发展,通用的同步(USRT)和异步(UART)接口芯片种类越来越多,如下表所示。它们的基本功能是类似的,都能实现上面提出的串行通信接口基本任务的大部分工作,且都是可编程的。采用这些芯片作为串行通信接口电路的核心芯片,会使电路结构比较简单。
用C编写的RS232串口通信程序
void main() { delayms(100); init(); //初始化系统 delayms(100); init_wdt(); //初始化看门狗 while(1) { while(!RI_0) //是否收到数据 { clr_wdt(); } RI_0=0; //清除接收中断标志 buffer=S0BUF; if(buffer==0x5a) //检测祯头0 start0=1; if(buffer==0x54) //检测祯头1 start1=1; if(buffer==0x5a) //检测祯尾0 end0=1; if(buffer==0xfe) //检测祯尾1 end1=1; if((start0==1)&(start1==1)) { buff[i]=buffer; //从祯头1开始存储数据 i++; } if((end0==1)&(end1==1)) //是否已经接收祯尾 { count=i; //数据长度为count个 i=1; if((buff[2]==0x03)&(count==107)) //是否422指令 { buff[0]=0x5a; //重填祯头0 buff[count-4]=0; //校验和清零 for(k=2;k<(count-4);k++) //计算校验和 { buff[count-4]+=buff[k]; } for(k=0;k S0BUF=buff[k]; while(!TI_0); //等待发送完成 TI_0=0; //清除发送中断标志 } reset(); } else if((buff[2]==0x05)&(count==7)) //是否AD测试指令 { sendad(); reset(); } else if((buff[2]==0x18)&(count==7)) //是否发送时序信号指令 { sendpaulse(); reset(); } else //如果接收错误,则恢复各标志位为初始状态以便下次接收 { reset(); } } } } void reset() { start0=0; //祯头祯尾标志位清零 start1=0; end0=0; end1=0; for(k=0;k 单片机与PC机串行通信中波特率的确定 关键字:单片机 PC机串行通信波特率 1 单片机异步通信口的特点及波特率的选定 MSC51系列单片机有一个全双工的异步通信口,他利用其RXD和TXD与外界进行通信,其内部有2个物理上完全独立的接收、发送缓冲器SBUF,可同时发送和接收数据。异步串行通信发送和接收数据的速率与移位脉冲同步。一般用51系列的T1定时器作为波特率发生器,T1的溢出率经二分频(或不分频)后又经十六分频作为串行发送或接收的移位脉冲,移位脉冲的速率即波特率。单片机的异步通信波特率与串行口的工作方式、主振频率Fosc及定时器T1的工作方式有关。一般通信中使T1工作于方式2(可重装时间常数方式),若Fosc取6 MHz,则波特率的计算公式如下: 其中:SMOD是可编程的(即PCON的第8位),由此公式计算出的波特率是不标准的波特率。? 2 PC机异步通信口及其波特率的设置 由于UART(通用异步接收/发送器)的产品型号很多,PC机和XT机都采用的是INS8250芯片, AT机采用的是NSI16450芯片,他们二者是兼容的。因此这里以8250芯片为例来说明PC机异步通信波特率的设定方法。PC机中有2个异步通信口,一个是COM1,其端口地址范围是3F8H~3 FFH,另一个是COM2,其端口地址是2F8H~2FFH。其与MODEM配合可以实现远距离通信。其波特率是标准波特率50~9 600 b/s。 8250内部有10个寄存器端口,其中有一个除数锁存器,可以通过编程除数的大小来确定异步通信的波特率。8250使用的频率是1843 2 MHz的基准时钟输入信号,所以必须用分频的方法产生所需要的波特率(移位脉冲)。除数锁存器的值必须在8250初始化时设置,即把通信线路控制器的最高位(DLAB)置1,然后分两次把除数锁存器的高8位和低8位分别写入端口地址3F8H和3F9H(COM1),8250传送或接收串行数据时使用的时钟信号的频率是数据传输波特率的16倍,即波特率=16×除数/1 843 200。由此公式可以计算出几种标准波特率与除数的对应值如下:对应于波特率为1 200 b/s的除数锁存器的低8位值为60H;对应于波特率为2 400 b/s的除数锁存器低8位的值为30H;对应于波特率为4 800 b/s的除数锁存器低8位的值为18H;对应于波特率为9 600 b/s的除数锁存器低8位的值为0CH。 3 用PC机的汇编语言设计的串行通信程序中波特率的设定 PC机的ROM BIOS串行通信管理程序为14H号中断处理程序,他可支持DTE与DCE间的通信,也能支持两个DTE间用MODEM连接方式的RS232C接口通信。BIOS串行通信管理程序的功能是:串行口初始化、发送数据字符、接收数据字符和取串行口状态。他是利用查询方式来实现数据字符的接收和发送,但当查询超时一定时间后就不再继续查询,而认为是线路故障或对方未准备好,并通过返回参数中的超时标志来表示操作失败。 BIOS INT 14H的中断功能调用的入口和出口参数如下: 例如要设计用COM1来发送字符,波特率为1200 b/s,8 个数据位,1个停止位,采用查询方式无效验位,则初始化程序如下: 4 利用Turbo C编写的PC机通信程序中波特率的设定 Turbo C函数库中提供了专门的调用BIOS串行软中断的函数Bioscom(int cmd,char byte,int pure),其中:参数cmd用来设置通信类型,cmd=0,初始化串行口pure;cmd=1,发送一个字符;cmd=2,接收一个字符;cmd=3返回串口当前状态。参数byte用来确定串行口的异步单片机与PC机串行通信中波特率的确定