最小方差自校正控制系统研究
最小方差自校正控制系统研究
无锡宏源技师学院宗珏
摘要
自校正控制基本思想:参数估计递归方法的基本思想和各种不同类型的控制算法,可以形成一个实时的计算机控制系统控制参数的自动校正。然而,根据不同类型的算法所使用的不同类型的自调优控制系统。自调整控制器自适应控制从理论到实践是最成熟的控制方法之一。
这个课题主要是最小方差自校正控制系统的研究。最小方差自调整控制器参数不变但是未知SISO离散时间系统,输出与最小方差自调优控制律设计为目标,直接使用递归最小二乘算法估计控制器的参数。通过建立最小方差控制系统的结构模型以及广义最小方差控制系统的结构模型;建立起性能指标;在Matlab下对最小方差控制系统及广义最小方差控制系统进行仿真并且对两种仿真结构进行对比分析。
关键词:自校正控制;递推最小二乘法;最小方差控制;广义最小方差控制
1.1研究目的和意义
在如今,自动化水平已成为衡量各行各业现代化的一个重要标志,对连续和现代工业生产,大规模网络的快速发展和自动化方向,控制系统的质量也提出了更高的要求,除了简单的控制系统,各种复杂的、多变量、时变、非线性和随机控制系统研究尤为重要。所以出现了很多新的控制理论和控制理论的不断发展,它跨越学科界限,正朝着控制论和信息论的基础上,仿生智能控制理论发展。因此对这些控制理论的研究和验证是非常必要的。
随着计算机技术的飞速发展,微电子技术、自调优控制应用程序和在理论上取得了很大的进步,它已经成为现代控制理论,在重要领域极为活跃。在应用上,它涉及多方面的工业部门,大大提高了性能指标及产品质量,节约了能源,并且取得了较为显著的效果。在理论研究方面,研究者也取得了一系列有价值的研究成果。
各种自动化工程学院开了自动化研究课程,但随着现代控制理论是抽象,很难结合实际,缺乏一些不错的实验设施,影响教学质量和人才培养质量,和控制方案的确定及其系统设计、参数设定和过程应基于对象的特点,和对象的特征复杂,很难实现,通过理论计算研究完全控制系统设计和控制参数设置,到目前为止仍然是不可能的。
本文研究的对象是最小方差自校正控制系统。最小方差自校正调节器输出根据最小方差自调优控制律,采用递归最小二乘参数估计算法直接估计控制器参数。基于自适应控制、自调优控制和最小方差自校正控制算法推导,建立最小方差控制系统结
构和广义最小方差自校正控制系统结构,建立了其性能指标。通过matlab仿真,然后比较分析。符合研究为了提高学生对理论的理解和应用,在实践中分析问题和解决问题的能力为目标,培养学生的综合设计能力【1】。
1.2自适应控制系统的概述
介绍了自适应控制是控制理论在1950年代,首先是试图用在飞机的飞行员和导弹控制系统,因为这种对象在不同的高度和速度,其气动特性变化较大,超出了正常范围的反馈控制器可以适应,所以有人提出了一种变结构控制系统,处理原控制器故障造成的外部环境变化和特殊情况。但当时由于缺乏适当的硬件正确实施计划,加上计划的理论基础,因为人们仍不明白,所以没有广泛使用【2】。
自七零年代以来,由于过程控制和空间控制的需要,特别是在计算机技术的推动下,微电子技术、自适应控制理论和设计方法有一个更快的发展,用传统的控制理论和最优控制理论是不同的,自适应控制可以处理在一个受控环境中模型的知识和知识不是很全面的,高品质的质量控制。它已成为一个非常活跃的现代控制理论和魅力的重要的科学领域。大量的实践证明,和过程对于复杂的控制对象,使用自适应经常可以提高现有的生产效率,降低成本,提高产品质量和开发新产品,这也许就是自适应控制到目前为止都如此受欢迎的原因【3】。
对于自适应控制系统来说,可能存在着两种不同的情况。一种是,系统的数学模型本身是不确定的,如模型参数是未知的,但系统的基本工作在一个特定环境中,这种系统称为确定性自适应控制系统;另一种是,不仅被控对象的数学模型是不确定的,并且系统工作的环境还是随机的,这类系统称为随机自适应控制系统。等效测量噪声和随机干扰很小,未知的对象控制可以近似的参数自适应控制来处理不确定性。
自适应控制系统通常可以分为两大类:自校正调节系统和模型参考自适应系统。
自校正控制系统是随机的结果调整问题,并确定的模型参考自适应系统伺服问题的结果,尽管不同的来源,但是他们属于同一种类型的机制。自校正控制系统参数估计的修正计算的输出直接控制器来控制对象的参数变化,从而使整个系统结构简化,和可用的指标设计控制器【4】。
1.3最小方差自校正控制的研究及应用
如今,在许多工业控制领域,控制对象的参数,并在许多情况下将未知的定常或受到各种各样的干扰是时变的,除了输入的反应往往是一个滞后时间,控制对象或多或少存在一定的非线性特点,常用的PID控制难以取得好效果,和在线自调整控制系统可以实时调整参数(在线实时识别参数),来达到较好的控制效果。由于最小方差自校正控制目前存在一定的局限性和缺点,近年来,研究者已经提出了很多改进的方
法。使其更适应实际的过程控制。以下是一些提高提出的控制方法。
1,基于最小方差自校正器的RLS - PI算法。因为传统的最小方差校正器是递推增广最小二乘法参数估计,一个精确值,参数估计收敛慢的缺点,所以通过使用最小二乘-伪逆估计算法,来改进参数估计算法来让参数值的精度提高,从而达到控制效果。
2,基于c - r模糊模型的非线性系统的广义最小自校正控制是使用c - r模糊模型的非线性系统建模、模糊模型,并根据此模型与线性系统每一刻的显式表达式,但在时间间隔表示明显的非线性系统的特性提出了基于 c - r模糊模型的非线性系统的自适应控制算法。
3,基于BP网络参数自调整广义最小方差自校正控制,使用BP网络学习函数实现广义最小方差自校正控制器参数自调整。控制器是利用BP网络的自学习功能,动态地修改神经网络的权重参数校正方法,该方法可以有效地解决算法难以确定的参数和其他缺陷,又使得系统能够较好地适应负荷以及外界干扰的变化,从而得到满意的控制质量。
4,与神经网络补偿的极点配置广义最小方差自校正控制,首先使用传统的线性模型的受控对象识别,然后使用神经网络来补偿线性模型识别的余差补偿。神经网络和线性模型构成对象的识别模型,并提出基于显式模型的极点配置广义最小方差自校正控制。此法适用于非线性对象,具有较高的精度和更快的收敛速度,而且具有较强的鲁棒性。
2.1辨识定义
A.Zadeh曾经确认下这样一个定义:“识别输入和输出数据的基础上,从给定的一组模型,确定模型和等效测量系统”。这一定义明确指出识别三个要素:输入和输出数据,模型类,等价标准。其中,数据是识别的基础;等价准则优化目标识别的过程中,模型的范围是模型类。。当然,根据Zadeh的定义,找到一个完全等效模型和实际过程是极其困难的。但从实用的观点来看,该模型不是很苛刻,因此识别一些实用的定义。
1.辨识目的
明确的模型应用程序的最终目标是非常重要的,因为它将决定的模型类型,精度要求,使用什么样的识别方法等问题。例如,如果模型应用于定值的控制,所以可以降低模型的精度要求;如果模型应用于伺服系统或预测系统,所以精度要求相对稍高。
2.先验知识
对于一个给定的过程在识别之前,一些方法理解的过程,在这个过程中通用的先验知识,如过程或积分的比例特征,时变或非时变和短暂的时间,和纯延迟时间常数,截止频率、静态放大和噪声特性和操作条件,等先验知识设计部分将发挥指导作用。
3.模型结构辨识
识别模型结构由假设的结构模型试验,确定结构参数两部分内容。假定模型结构就是按照辨识的目的,利用相关知识定律、定理、原理等对具体的问题进行分析,包括测定试验研究和机理分析,近似技术,先验假设模型重用模型识别方法,如选择可用的模型。要做到这一点,首先要明确建立模型是静态的,连续性和线性相关,是否参数模型,等等。但是,检验前的模型结构并不一定是模型的最终形式,在假定模型结构的前提下才能对其进行确认,并且完成它需要利用辨识的方法确定模型的检验。模型结构参数是辨识模型结构的第二部分内容。比如说模型结构决定了差分方程的选用形式:
)()()()()(11k e k u z B z k z z A d +=--- (2.1)
其中
???+++=+++=-------n n n
n z
b z b z b z B z a z a z A 22111111)(1)( (2.2) 然后为模型结构参数识别的过程模型结构(阶次)和过程(纯延迟)。
4.模型参数辨识
当我们把模型结构确立之后,就需要对模型参数进行辨识。这个方法有很多,其中最基本的、应用最广泛的一种最小二乘的方法。使用它可以使大多数的工程问题得到满意的识别结果。但是,最小二乘法也有一些比较严重的缺陷,比如说在时变的过程或者是在被有色噪声严重污染的时侯,它几乎不可以适应。
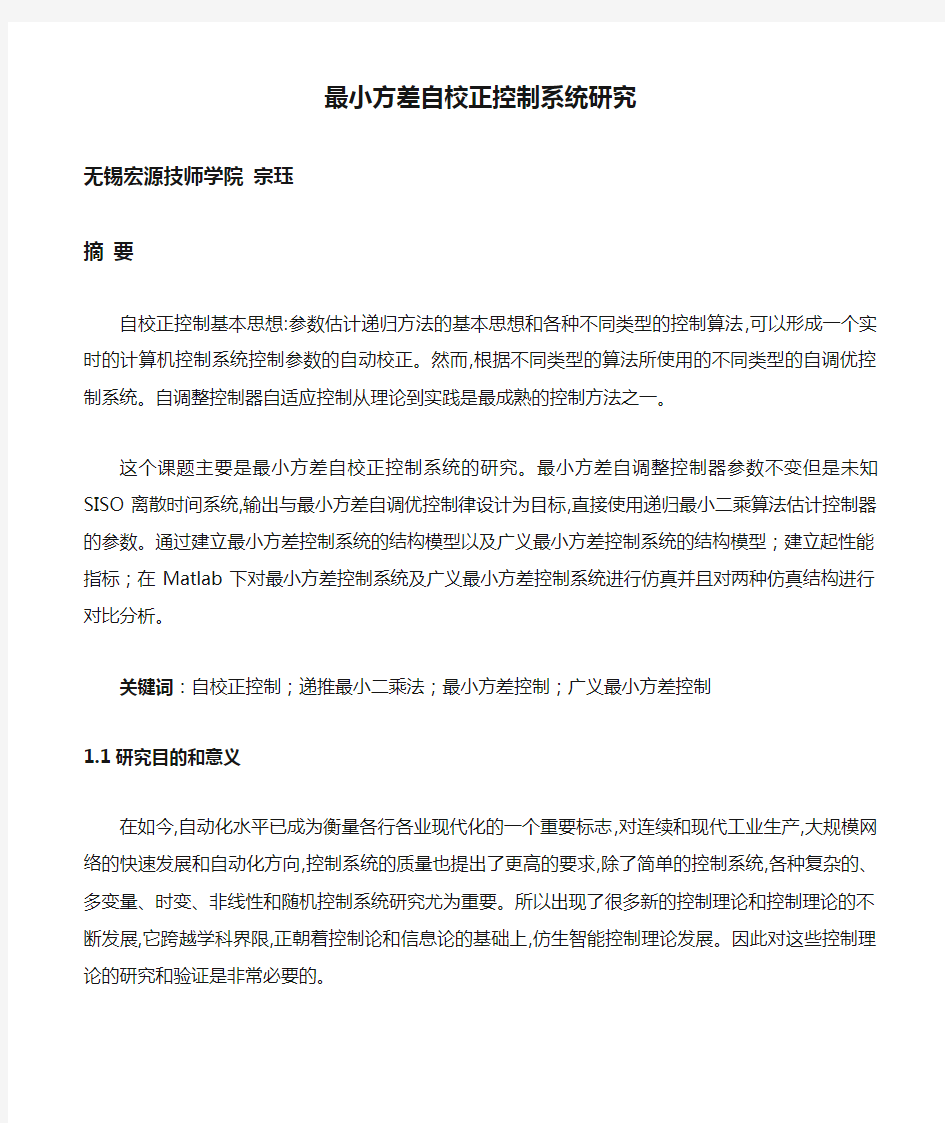
当系统识别方案实施,一般包括实验设计的内容,模型结构、参数估计和模型验证
的四个方面,它们之间的关系等可以用来说明如图2.1所示。
图2-1 系统辨识的内容和步骤
2.2最小二乘法
“黑盒”,只考虑过程的输入和输出特性和不带机制过程中内部结构。其中,输入)()(k z k u 和输出部分是可以被观测出的;)(1-z G 可以描述输入输出的特性,这就是过程模型,可以表示成:
)
()()(111---=z A z B z G (2.3) 其中
??
???+++=++++=--------b b a a n n n n z b z b z b z B z a z a z a z A 2211122111)(1)( (2.4) 过程的输出不仅会受输入量)(k u 的影响,通常还会受到若干不确定因素的影响,往往我们将这些不确定因素的影响总结为附加噪声)(k n 。当{})(k n 是均值等于零、谱密度为cos ω、平稳随机序列的有理函数时,按照表示定理,可以将)(k n 表示为
)()()(1k v z N k n -= (2.5)
其中,)(k v 是白噪声;)(1-z N 是噪声模型,通常可以将其表示成:
)()()(111
---=z C z D z N (2.6) 式中
?????++++=++++=--------d d c c n n n n z
d z d z d z D z c z c z c z C 22111221111)(1)( (2.7) 对于辨识方法的研究就其基本原理看来是相同的,但不同的方法所采用的模型结构又是不相同的【11】,比如说最小二乘法所采用的模型为:
)()()()()(11k v k u z B k z z A +=-- (2.8)
增广最小二乘法的模型是:
)()()()()()(111k v z D k u z B k z z A ---+= (2.9)
广义最小二乘法的模型是:
)()
(1)()()()(111k v z C k u z B k z z A ---+= (2.10) 因此不管模型是采用什么样的辨识法,所利用到的过程模型通常是相同的,不相同的部分只是噪声模型。对于一些实际问题来说,应选用何种模型,往往没有一般的原则遵循【12】
2.3递推最小二乘法
设SISO 的过程采用了如下数学模型:
)()()()()()(111k v z D k u z B k z z A ---+= (2.35)
,其中)()(k z k u 和是系统过程的输入输出;)(k v 是均值=0随机噪声;且
??
???++++=+++=++++=------------d d b b a a n n n n n n z d z d z d z D z b z b z b z B z a z a z a z A 2211122111221111)()(1)( 假设模型阶次d b a n n n 和、都已确定,这类问题的识别可用增广最小二乘法,为了获得令人满意的结果。令
??
??
?--------==ττθ)](,),1(),(,),1(),(,),1([)(],,,,,,,,,,,[212121d b a n n n n k v k v n k u k u n k z k z k h d d d b b b a a a d b a 可将模型(2.35)式化成最小二乘格式
)()()(k v k h k z +=θτ (2.36)
因为上式)(k v 为白噪声,所以参数θ的无偏估计量可以用最小二乘法得到。但数据的向量)(k h 中有不可测的噪声量为,),1( -k v )(d n k v -,它们可以用相应的估计值进行代替,
τ)](?,),1(?),(,),1(),(,),1([)(d b a n k v k v
n k u k u n k z k z k h --------= 其中,;0,0)(?≤=k k v
当0>k 时,按下式 )1(?)()()(?--=k k h k z k v
θτ 或
)(?)()()(?k k h k z k v
θτ-= 计算。这样,根据(2.34)式立即就可写出增广最小二乘递推算法(简称RELS ):
)]1(?)()()[()1(?)(?--+-=k k h k z k K k k θθθτ
1]1)()1()()[()1()(-+--=k h k P k h k h k P k K τ (2.37)
)1()]()([)(--=k P k h k K I k P τ
上述分析表明,增广最小二乘法是一个简单的扩展最小二乘法。它扩展了参数向量和向量的尺寸数据,同时考虑噪声模型识别,从这个意义上讲,可以称为增广最小二乘法【23】。
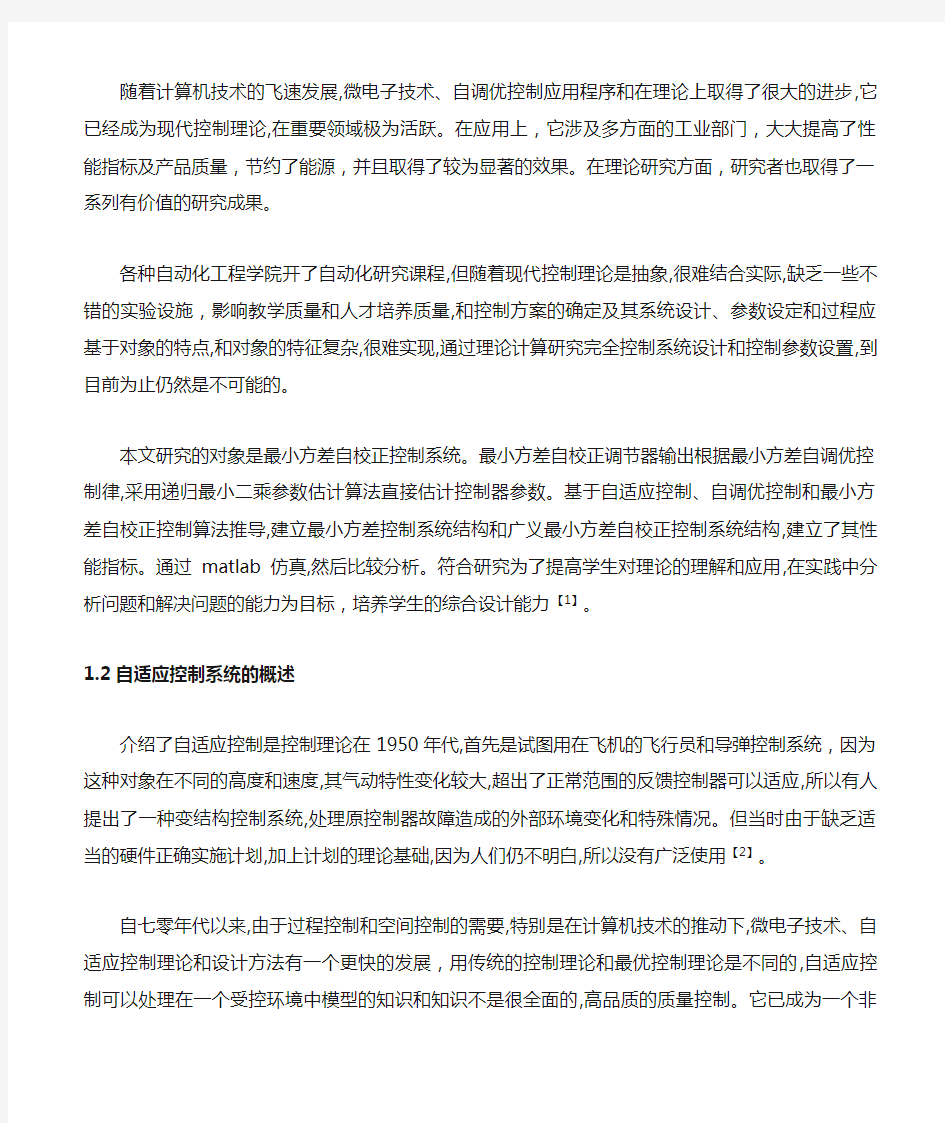
增广最小二乘仿真例子:
考虑如下系统:
2211(),()32G s R s s s s s
==+++ 将传递函数化为差分方程形式为:
)1(1353.0)5()4(2325.0)2(04979.0)1(5032.0)(--)(+-+-=-+--k k k u k u k y k y k y ξξ 式中,()k ξ为方差为1的白噪声。取初值6?(0)10(0)0P I θ==、。选择方差值为1的白噪声作为系统的输入信号u (k ),仿真结果图如图2-2所示。
-2-1.5
-1
-0.5
00.51
1.5
2
k 参数估计a a 的参数估计收
敛图形
k 参数估计b
b 的参数估计收敛图形
k 参数估计c
c 的参数估计收敛图形
图2-2 递推增广最小二乘法仿真图形 可见估计和真值的差值很小,允许范围内,系统可以很明好参数估计。
OLS估计量的性质的推导证明(一些补充)
OLS 估计量的性质的推导证明(一些补充) 1、 线性: 2 2 2 2 2 2 (()()0) i i i i i i i i i i i i i i i i i i i i i x y x Y Y x Y Y x x x x x x Y x kY k x X X X n X x x ββΛ Λ -===-==-=-===∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑i 由于(1)证明斜率系数估计量是Y的线性函数。 , 其中= 22 2222 (0)(1,0)01,1·0,0()1()101,1 i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i x k x x k x x x k x x x x k X k x X k x X k k X x x k x k k X k X =========+=+=+====∑∑ ∑ ∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑ 注意: (由于对确定量而=()=故又故言是定值)前已证前已证记得与对后面的故证明会有用。 211 ),i i i i i i Y Y X k X Y w Y w k X n n ααβΛ Λ Λ =-=-==-∑∑() 证明截距系数估计量是的线性函数。 (其中
11 )111):(0)10(1;)1,i i i i i i i i i i i i i i i i i i w k X n k X X k n n w X k X X X X k X n n X k k X w w X X n =-=-=-===-=-====-=∑∑∑∑∑∑∑∑∑∑∑∑∑ 注意 ( 前已证前已证注意 0,对后面的 1;(证明有用。 2、无偏: 112211221122)()(...)()()...()()()...(1,0)()i i i i i i i i n n n n n n kY k X k k X k k E k E k k k E k E k E k k E k E k E k X k E βββαβεαβεβεεεεεεεεεεεΛ Λ ==++=++=+==+++=+++=++=+∑∑∑∑∑∑∑∑∑iiiii i iii(1) 是的无偏估计量。 ( 由于 (前已证注 意假设 0())((0)i i i k E E k ββεεεβββ Λ Λ ==+=+=∑∑ii 所以对等式 =两边取期望有,) (1,i i i i i w w E w X k ααεαααααεα Λ ΛΛ Λ ==+=+∑∑∑∑ii课件上有错误:(2) 是的无偏估计量,即) 证明方法同上,参考课=应改为=注意利用 件0。 3、有效性:
自动控制系统的校正
第五章自动控制系统的校正 本章要点 在系统性能分析的基础上,主要介绍系统校正的作用和方法,分析串联校正、反馈校正和复合校正对系统动、静态性能的影响。 第一节校正的基本概念 一、校正的概念 当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。增添的装置和元件称为校正装置和校正元件。系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。 二、校正的方式 根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。 1.串联校正 校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。 图5-1 串联校正 2.反馈校正 校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。 3.顺馈补偿校正
顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。校正装 置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。从而控制和抵消扰动对输出的影响,提高系统的控制精度。 三、校正装置 根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。 1.无源校正装置 无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。 无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。 2.有源校正装置 有源校正装置是由运算放大器组成的调节器。图5-4是几种典型的有源校正装 置。有源校正装置本身有增益,且输入阻抗高,输出阻抗低,所以目前较多采用有源图5-2 反馈校正 图5-3 无源校正装置 a)相位滞后 b)相位超前 c)相位滞后-超前
最小方差自校正控制Matlab程序
最小方差自校正控制Matlab 程序 1.自校正控制 自适应控制有很多种,例如模型参考自适应控制系统、自校正控制系统等。 自校正控制(STC)最早是由R.E. Kalman 在1958年提出的,他设计了基于最小二乘估计和有限拍控制的自适应控制器,并为了实现这个控制器,还建造了一台专用模拟计算机,但其发展受到了当时的硬件问题的闲扰。 图1间接自校正控制系统 图2直接自校正控制系统 自校正控制系统也有内环和外环。内环与常规反馈系统类似,外环由对象参数递推估计器和控制器计算机构组成,其任务是由递推估计器在线估计被控对象参数,用以代替对象的未知参数,然后由设计机构按一定的规则对可调控制器的参数进行在线求解,用以修改内环的控制器。 自校正控制器是在线参数估计和控制参数在线设计两者的有机结合。另外,在参数估计时,对观测数据的使用方式有两种。一种是不直接更新控制器参数,而是先估计被控对象模型本身的未知参数,然后再通过设计机构得到控制器参数,如图 1所示,称为间接算法,另一种是直接估计控制器参数,这时需要将过程重新参数化,建立一个与控制器参数直接关联的估计模型,称为直接算法,如图2。 2.最小方差自校正Matlab 算法仿真(直接自校正和间接自校正) 设被调对象为CARMA 模型 111()()()()()()d A z y t z B z u t C z t ξ----=+ 其中, 112 11 11()1 1.70.7()10.5()10.2A z z z B q z C z z -------=-+=+=+ 式中,()k ξ为方差为1的白噪声。 (一)取初值6?(0)10(0)0P I θ==、,0 ?f 的下界为min 0.1f =,期望输出()r y k 为幅值为10的方波信号,采用最小方差直接自校正控制算法,观察不同时滞d=1、4、8时,最小方差自校正算法的控制效果。
《自动控制原理及系统分析》课程标准
《自动控制原理及系统分析》课程标准 1.课程性质与设计思路 1.1课程的性质 《自动控制原理及系统分析》是一门必修的技术基础课程,适用于电气自动化专业二年级学生。本课程的目标是培养学生掌握与自动控制原理相关的专业知识和综合应用能力,培养解决自动控制系统调试与维护方面实际问题的能力。通过Matlab工具来辅助自动控制原理中的复杂计算与作图、验证分析与设计的结果,使学生掌握必要的基础理论知识,并了解它们对实际问题的指导作用,促进学生养成积极思考、长于分析、善于推导的能力和习惯,为以后专业课程的学习打下基础。 本课程要以《电路分析基础》、《计算机应用基础》等课程的学习为基础,并行课程为《模拟电路技术》、《数字电路技术》,同时为《电力电子技术》、《单片机应用技术》等课程的学习奠定基础。 1.2设计思路 电气自动化技术专业的主要工作岗位有:自动化设备与生产线的维修电工、车间电气技术员、安装调试维修工、PLC程序设计员、技术改造员及系统维护技术员,本课程依据工作岗位的工作任务对职业能力和知识的要求而设置的。 本课程的教学以项目为基点,学习项目按照难易程度依次递进的思路设计的。通过该系列项目的学习,反复训练,通过本课程的学习,使学生了解自动控制的发展历史;熟悉自动控制系统的建模;掌握自动控制原理的基本概念,掌握
自动控制原理基本的分析与设计方法;掌握典型控制系统的校正方法;培养学生利用自动控制的基本理论分析与解决工程实际问题的初步能力;使学生能运用所学知识,分析、研究专业课中的相关问题,为后续课程的学习打下坚实的理论基础。 本课程教学项目结合本系实训条件,按“资讯、决策、计划、实施、检查和评估”一个完整的过程实施教学。教学过程做到全过程开放,主要课程内容在教室和机房实训室完成,同时结合校外实训基地完成部分模块,通过学习环境与工作环境相结合,提高学生实践能力,融“教、学、做”为一体,强化学生职业能力。 建议本课程在第二学年的第一学期开设。 课程的总学时数为64左右。 课程的总学分为4学分。 2.课程目标 通过本课程的学习,使学生了解自动控制的发展历史;熟悉自动控制系统的建模;掌握自动控制原理的基本概念,掌握自动控制原理基本的分析与设计方法;掌握典型控制系统的校正方法;培养学生利用自动控制的基本理论分析与解决工程实际问题的初步能力;使学生能运用所学知识,分析、研究专业课中的相关问题,为后续课程的学习打下坚实的理论基础。培养学生具有良好的职业素质、实践能力和创新创业精神,并使学生形成科学的学习和工作方法。 1.1能力目标 ●能够建立和简化自动控制系统的数学模型 ●能够运用MATLAB仿真软件对系统进行时域性能分析 ●能够运用MATLAB仿真软件对系统进行校正 ●能够运用MATLAB仿真软件绘制根轨迹 ●能够利用自动控制的基本理论分析与解决典型的工程实际问题 1.2知识目标 ●掌握自动控制原理的基本概念 ●掌握自动控制系统时域分析方法
广义最小方差控制
%广义最小方差控制(显示控制) 考虑如下系统: () 1.7(1)0.7(2)(4)0.5(5) ()0.2(1)y k y k y k u k u k k k ξξ--+-=-+-++- 式中ξ(k )为方差为0.1的白噪声。 取111()1,()1,()2P z R z Q z ---===,期望输出y r (k )为幅值为10的方波信号。 clear all;close all; a=[1 -1.7 0.7];b=[1 2];c=[1 0.2];d=4; na=length(a)-1;nb=length(b)-1;nc=length(c)-1; nf=nb+d-1;ng=na-1; P=1;R=1;Q=2; %加权多项式 np=length(P)-1;nr=length(R)-1;nq=length(Q)-1; L=400; uk=zeros(d+nb,1); yk=zeros(na,1); yrk=zeros(nc,1); xik=zeros(nc,1); yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];
xi=sqrt(0.1)*randn(L,1); [e,f,g]=singlediophantine(a,b,c,d); CQ=conv(c,Q);FP=conv(f,P);CR=conv(c,R);GP=conv(g,P); for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik]; u1=-Q(1)*CQ(2:nc+nq+1)*uk(1:nc+nq)/b(1)-FP(2:np+nf+1)*uk(1:np+nf ); u2=CR*[yr(k+d:-1:k+d-min(d,nr+nc));yrk(1:nr+nc-d)]; u(k)=(u1+u2-GP*[y(k);yk(1:np+ng)])/(Q(1)*CQ(1)/b(1)+FP(1)); %更新数据 for i=d+nb:-1:2 uk(i)=uk(i-1); end uk(1)=u(k); for i=na:-1:2 yk(i)=yk(i-1);
PCS流量单元最小方差控制器性能评估
电信学院毕业设计任务书 题目PCS流量单元最小方差控制器性能评估 学生姓名班级学号 题目类型技术开发指导教师李二超系主任李炜 一、毕业设计的技术背景和设计依据 现代流程工业对控制系统的控制品质提出了严格的要求。然而,相关研究表明:在工业控制过程中,多达60%的控制回路由于控制策略失配、控制参数失调和生产工况变化等原因,长期工作在性能欠佳的状态。而发现并定位这些欠优化回路,仅靠人工进行工程试验很难达到经济、高效的要求,因此研究相关的理论和方法,实现对控制回路性能的实时自动检测和评价,显得尤为重要。 本实验室具有德国FESTO公司研制生产的PCS实验装置,集成了目前工业控制中较为典型的四种控制系统:液位控制、流量控制、压力控制、温度控制,分为四个独立站。在往届毕业设计中,开发了基于OPC的PCS平台独立单元控制算法,数据采集方便,利于控制器性能监控与评估的实施。单水箱的流量控制过去往往使用的是PID控制,本次毕业设计引入最小方差控制器,来测试系统的控制精度和鲁棒性,比较两种控制器的性能。 二、毕业设计的任务 1、查阅相关科技文献,掌握控制、检测、通讯等技术要求; 2、利用OPC进行通讯完成对流量单元的PID和最小方差控制; 3、进行系统调试; 4、撰写毕业设计说明书; 5、完成指定内容的外文资料翻译。 三、毕业设计的主要内容、功能及技术指标 1、毕业设计的主要内容 1)设计说明书正文主要内容要求 ①PCS流量单元控制工艺过程简介; ②最小方差控制的原理和仿真; ③MATLAB利用OPC进行通讯的实现过程; ④两种控制器的在线调节过程。 全文要求逻辑严密、条理清晰,文字流畅,理论联系实际,符合科技写作规范。
自校正控制系统分析
自校正控制系统分析 摘要:本文介绍了自校正控制系统的基本结构,主要介绍了基于PID 结构的间接自校正控制系统的控制算法,并通过实例仿真结果,表明了自校正PID 控制不仅需要调整的参数少,而且还能够根据对象特性的变化在线修改这些参数,增强了控制器的自适应能力。 关键字:自校正控制系统;PID 控制;自适应能力 1 引言 自校正控制系统主要由参数估计器、控制器设计、控制器和被控对象4部分组成,如图1所示。该系统内环由被控对象和可调控制器组成,外环则由过程模型参数估计器和控制器参数计算器所组成,其任务是辨识过程参数再按选定的设计方法综合出控制器参数,用以修改内环的控制器。这类系统的特点是必须对过程或者被控对象进行在线辨识估计器,然后用对象参数估计值和事先规定的性能指标在线综合出调节器的控制参数,并根据此控制参数产生的控制作用对被控对象进行控制经过多次地辨识和综合调节参数可以使系统的性能指标趋于最优。 图1 自适应控制系统结构图 自适应控制算法对于复杂系统能够达到较好的控制精度跟踪速度以及稳定性,其实时性好,算法简单,易于实现。然而,在PID 控制中,一个至关重要的问题就是PID 参数的整定。典型的PID 参数整定方法是在获取被控对象数学模型的基础上,根据某一整定规则来确定参数。PID 参数整定的优劣,不但会影响到控制质量,而且会影响到控制系统的稳定性和鲁棒性。本文介绍了基于PID 结构的间接自校正控制。 2 基于PID 结构的间接自校正控制 自校正PID 控制算法的设计思想是: 以极点配置控制律为控制器基本形式,引入递推算法估计对象参数,并将估计结果按极点配置法进行控制器参数的设计。下面介绍自校正PID 控制器。 被控对象为 )()()()()(11k e k u z B z k y z A d +=--- (1) 式中,u(k),y(k)表示系统的输入和输出,e(k)为外部扰动,d ≥为纯延迟,且221111)(---++=z a z a z A ,21101)(---+???++=z b z b b z B b n 。 对系统(1)采用PID 控制,此时,对应的PID 控制器可表示为 )()()()()()(1111k y z R k y z R t u z F r ----= (2) ?=--)()(1 11z F z F (3) 过 程过程模型参数估计器 可调控制器 输出控制量输入 过程参数 控制器 参 数 控制器参数 计算器
自校正DMC-PID过热汽温控制系统仿真
文章编号:l∞6—9348(2∞8)12—0254一04 自校正DMC—PID过热汽温控制系统仿真 柳其亮,张福斌 (西北工业大学航海学院,陕西两安7100r72) 摘要:为了克服在过热汽温控制中对象参数变化对系统控制带来的困难,提出了自校正DMc—PID控制方法。保留了通常过热汽温控制采用的串级控制结构,能够快速有效地克服干扰。同时通过参数辨识得到非参数模型进行动态矩阵控制(DMc),即自校正DMc,无需从广义对象的阶跃模型的上下界中选取一条标称的阶跃响应曲线去实现DMc控制,实际应用起来更简单。仿真结果表明,控制方法有良好的控制效果,改善了模型失配时的鲁棒性,在过热汽温控制中是十分有效的。 关键词:自校正;动态矩阵控制;过热汽温;模型失配 中圈分类号:1睨73文献标识码:A SimulationofSelf—tⅢlingDMC—mSuperheated Ste锄Temperatu聆ControlSystem UUQi—li舳g,ZHANGFu—bin。 (Coue护ofM8rine,№曲we8temPol”echnicalullive玛ity,xi'蛐Sh帅菇7100r72,ClIi∞)ABSTI认CT:D—Tlgthec伽碍eofcon呐lUllg8uperheatedgt锄tempe胁re,ino—ertooVercomethe胡kt8ofobject’sparaJnete璐varyingoncontrolqualitiesofthe8y8tem,a眈lf—tuniIlgDMC—PIDcontrolmetlIodisprop08edintlliBpaper-ni8methodreservesc∞cadecontml8tmctIl陀璐uallyusedbysuperheated8te锄tempemtIIrec叩咖l,∞“c曲overcomeinterferenceen.ectivelyandquickly.AttIles蛐etime,theDy枷icMatrixConnDl(DMC),wh船enon—param—cmodelis90ttenbypar锄eteridentification(tlIatisSeIf—tIlningDMC)isreaJized诵thout ch∞singanominalstep—responsecurveintlIeupper舳dl洲erbounds0ft量lebmadobject’s step modeltoachieVe DMCcontrol,tllussimplif如ngtheapplication.Simulati帅瑚ultsshowtllat,t}Iiscontmlme山0dc硼improvethem-bustnesswhenmodelmismatchhappens,h聃goodcontmlqllality锄disVerye任&tiVefor8uperheated 8te踟c伽仃01.ⅪE_YWoRDS:Self—tIlniIlg;DymIIlicnla嫡xc伽呐I;Superhe砒edste锄temperalI骶;M0dellIlis哪tch l引言 火力发电厂运行过程中,过热蒸汽温度对于电厂的安全经济运行有着重大影响。温度过高,容易损坏设备;温度过低,则降低热效率。因此,控制系统必须能够相当严格地将蒸汽温度控制在给定值附近。然而由于各种扰动因素影响汽温过程变化的惯性和迟延,使得汽温过程的动态特性随着运行工况的不同而变化较大,尤其是对于大容量机组而言,其动态特性变化更大,这就要求控制系统应具有强的鲁棒性。对于这样一个复杂而且控制要求又相当高的被控对象,常规的PID控制算法难以满足既定的控制要求。,本文引入自校正DMc—PlD控制器对其进行控制,把自校正DMc和串级控制结合起来,充分发挥自校正DMC算法的超前预测 收稿日期:2007一lO一3l修回日期:2007一儿一19 —254一性和强鲁棒性以及串级控制的抗干扰能力,力求在所有工况实现汽温的良好控制。 2控制算法及控制系统结构 2.1自校正控制 过热汽温系统是一个随机组负荷时变的对象,很难用一个精确的数学模型来描述。当控制系统中对象的参数时时刻刻追随对象动态特性的变化时,对这种系统进行分析相当困难。自校正控制用阶跃响应法获得对象的非参数模型能很好地解决这个问题。首先通过现场试验的方法(如果允许)使给定蒸汽温度为阶跃信号,在t=0,7’,27.,…,胛处测取实际蒸汽温度。利用测出的数据估计过热汽温对象参数,获得参数模型,然后将其转化为非参数模型,即阶跃响应动态系数,从而实时掌握对象参数变化情况。 设有受控自回归积分滑动平均模型 万方数据
最小方差控制
%最小方差控制(MVC) 考虑如下系统: () 1.7(1)0.7(2)(4)0.5(5)()0.2(1)y k y k y k u k u k k k ξξ--+-=-+-++-式中ξ(k )为方差为0.1的白噪声。 取期望输出y r (k )为幅值为10的方波信号。 clear all;close all; a=[1 -1.7 0.7];b=[1 0.5];c=[1 0.2];d=4;%对象参数 na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%计算阶次 nh=nb+d-1;%nh 为多项式H 的阶次 L=400; uk=zeros(d+nb,1); yk=zeros(na,1); yrk=zeros(nc,1); xik=zeros(nc,1); yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];%期望输出 xi=sqrt(0.1)*randn(L,1);%方差为0.1的白噪声序列 [h,f,g]=singlediophantine(a,b,c,d);%求解单步Diophantine 方程 for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据
u(k)=(-h(2:nh+1)*uk(1:nh)+c*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g* [y(k);yk(1:na-1)])/h(1);%求控制量 %更新数据 for i=d+nb:-1:2 uk(i)=uk(i-1); end uk(1)=u(k); for i=na:-1:2 yk(i)=yk(i-1); end yk(1)=y(k); for i=nc:-1:2 yrk(i)=yrk(i-1); xik(i)=xik(i-1); end if nc>0 yrk(1)=yr(k); xik(1)=xi(k); end end subplot(2,1,1); plot(time,yr(1:L),'r:',time,y);
附录3-1:高斯-马尔科夫定理的证明
高斯-马尔科夫定理(OLS 有效性)的证明 根据OLS 的一阶条件: 022) (='+'-=??βββX X y X S 设b 是解,则b 满足正则方程组 y X Xb X '=' 这正是我们曾分析的最小二乘正则方程组。因为X 是满秩的,所以X X '的逆存在, 从而得到解是 y X X X b ''=-1)( ββββX X y X y y S ''+''-'=2)( 022) (='+'-=??βββX X y X S 为了证实这确实是最小值,我们需要二阶编分矩阵 X X S b '=???=2') (2ββββ 是一个正定矩阵。 我们现在来证明这个结果。对任意一非零向量c ,令Xc X c q ''=,则 Xc q i i =='=∑νυ νν其中,2 除非ν的每一元素都为0,否则q 是正的。但若υ为零的话,则X 的各列的一个线性组合等于0,这与X 满秩的假定相矛盾。 三、最小二乘估计量的统计特性 在本节中,我们对回归量的两种情况,即非随机回归量和随机回归量下分别作讨论。 1、X 非随机回归量 若回归量当作非随机来进行处理时,则将X 当作常数矩阵处理就可导出最小二乘估计量的各种特性。可得 εβεβX X X X X X X b ''+=+''=--11)()()( (4) 若X 是非随机的,或0)(='εX E ,则(4)中第二项的期望值是0。所以,最小二乘
估计量是无偏的,它的协方差矩阵是 ]))([(]['--=ββb b E b Var ])()[(11--''''=X X X X X X E εε 11)(][)(--''''=X X X E X X X εε 121)()()(--'''=X X X I X X X σ 12)(-'=X X σ 在前面的内容中,对K =2的特殊b 是β的最小方差的线性无偏估计量。现在我们给出这个基本结果的一个更一般的证明,令β是Cy b =~ 的另一个不同于b 的线性无偏估计量, 其中C 是一个K ×n 矩阵。若b ~是无偏的, ,][][βεβ=+=C CX E Cy E 这暗示着CX=I ,并且εβC b +=~。所以可以得到b ~的协方差矩阵是 C C b Var '=2]~[σ 现在令X X X C D ''-=-1)(,由假设知D ≠0。那么,,~ *Dy b b b =-= ,''*)(2DD D D b Var Y σ==∑ 于是'DD 是非负定矩阵。 则 ]))()()([(]~[112'''+''+=--X X X D X X X D b Var σ )])()()([(112--'+'''+=X X X D X X X D σ ))((12-'+'=X X D D σ 在展开这个四项和式之前,我们注意到 )()(1X X X X DX CX I ''+==- 由于上面最后一项是I ,有DX=0,所以 122)(]~[-'+'=X X D D b Var σσ D D b V a r '+=2 ][σ
最小二乘法估计量的性质(高斯—马尔可夫定理的初步证明)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 最小二乘法估计量的性质(高斯—马尔可夫定理的初 步证明) 高斯马尔可夫定理: 若一元线性模型满足计量经济基本假设, 则参数的最小二乘估计(OLS) 是最小方差的线性无偏估计。 (BLUE) 最小二乘法估计量 OLS 的性质(高斯马尔可夫定理的 初步证明) 1.线性性: 0 和1 都是iy的线性函数证明: ; 令=j=njiixxxxk12)()( 则有 iniiyk==11 ,且有0=ik, 1=iixk,=i=niixxk122)(1 从而1 是iy的线性函数;同理, 0 = 令iikxnw=1,则有: iiyw=0,即0 也是iy的线性函数。 另有: 1=i w,0=iixw 2. 无偏性: 0 和1 都是0 、1 的无偏估计量;即有: ( )=,00=E ( )11=E 证明: 先证 ( )11E ,又, 1=iixk ()=i=++==iiiiinikuxkyk01011+1 +iiiiukxk ==+iiuk1 ( )(因为: ( )u1101=++=i0iiiiiEkxkkE =ik,1ixk) 同理,利用 1=i w和0=iixw可证得 ( ),00=E 3. 最优性或最小方差性:在所有的线性无偏估计中,0 和1 分别是0 、1 的方差最小的 1 / 2
有效估计量证明: 若1~ 是原值1 的一个线性无偏估计(方差条件不限),且记=iiyc1~(∵线性估计),再根据无偏估计的特性,有:再记P==111==1, 0iiixcc。 ()iiiykc~,则有11~+= P ( )Cov(+)),(2)()(),(2),(),(),(~,~~1111111111PCovDPDPCovCovP PPPCovCovD++=+=++== 如果能证明0),(1=PCov,则利用方差不小于 0 的性质,判定)()()()~(111DDPDD+=,1 即为所有无偏的线性估计中方差最小的。 ∵2u2i2u1)())((),)((),(iiiiiiiiiikkckkcykykcCovPCov=== 又∵=j=njiixxxxk12)()( 且有: 0=ik,1=iixk,=i=niixxk122)(1 所以0)(1)(1212112i===j=j=i=injnjnniiiiixxxxxcxckkc,0),~((1 =PCov, 有: )()()()111DDPDD+=,命题得证。 (此处利用了==1, 0iiixcc)。
计量经济学中相关证明
课本中相关章节的证明过程 第2章有关的证明过程 2.1 一元线性回归模型 有一元线性回归模型为:y t = ?0 + ?1 x t + u t 上式表示变量y t 和x t之间的真实关系。其中y t 称被解释变量(因变量),x t称解释变量(自变量),u t称随机误差项,?0称常数项,?1称回归系数(通常未知)。上模型可以分为两部分。(1)回归函数部分,E(y t) = ?0 + ?1 x t, (2)随机部分,u t。 图2.8 真实的回归直线 这种模型可以赋予各种实际意义,收入与支出的关系;如脉搏与血压的关系;商品价格与供给量的关系;文件容量与保存时间的关系;林区木材采伐量与木材剩余物的关系;身高与体重的关系等。 以收入与支出的关系为例。 假设固定对一个家庭进行观察,随着收入水平的不同,与支出呈线性函数关系。但实际上数据来自各个家庭,来自各个不同收入水平,使其他条件不变成为不可能,所以由数据得到的散点图不在一条直线上(不呈函数关系),而是散在直线周围,服从统计关系。随机误差项u t中可能包括家庭人口数不同,消费习惯不同,不同地域的消费指数不同,不同家庭的外来收入不同等因素。所以,在经济问题上“控制其他因素不变”实际是不可能的。 回归模型的随机误差项中一般包括如下几项内容,(1)非重要解释变量的省略,(2)人的随机行为,(3)数学模型形式欠妥,(4)归并误差(粮食的归并)(5)测量误差等。 回归模型存在两个特点。(1)建立在某些假定条件不变前提下抽象出来的回归函数不能百分之百地再现所研究的经济过程。(2)也正是由于这些假定与抽象,才使我们能够透过复杂的经济现象,深刻认识到该经济过程的本质。 通常,线性回归函数E(y t) = ?0 + ?1 x t是观察不到的,利用样本得到的只是对E(y t) = ?0 + ?1 x t 的估计,即对?0和?1的估计。 在对回归函数进行估计之前应该对随机误差项u t做出如下假定。 (1) u t 是一个随机变量,u t 的取值服从概率分布。 (2) E(u t) = 0。 (3) D(u t) = E[u t - E(u t) ]2 = E(u t)2 = ?2。称u i 具有同方差性。 (4) u t 为正态分布(根据中心极限定理)。以上四个假定可作如下表达:u t? N (0,??)。 (5) Cov(u i, u j) = E[(u i - E(u i) ) ( u j - E(u j) )] = E(u i, u j) = 0, (i?j )。含义是不同观测值所对应的随机项相互独立。称为u i 的非自相关性。 (6) x i是非随机的。 (7) Cov(u i, x i) = E[(u i - E(u i) ) (x i - E(x i) )] = E[u i (x i - E(x i) ] = E[u i x i - u i E(x i) ] = E(u i x i) = 0. u i与x i相互独立。否则,分不清是谁对y t的贡献。 (8) 对于多元线性回归模型,解释变量之间不能完全相关或高度相关(非多重共线性)。 在假定(1),(2)成立条件下有E(y t) = E(?0+ ?1 x t+ u t) = ?0+ ?1 x t。 2.2 最小二乘估计(OLS) 对于所研究的经济问题,通常真实的回归直线是观测不到的。收集样本的目的就是要对这条真实的回归直线做出估计。 图2.9
自适应控制结课论文-最小方差自校正控制器设计
最小方差自校正控制器设计
1 .最小方差自校正控制器 自校正调节器用在参数缓慢变化的系统,在原理上是按系统输出的最小方差综合自校正控制律的,其工作原理如下图所示: 自校正控制器的自校正过程是根据输入 {}()u t 和输出{}()y t 序列数据,不断地对过程 参数进行在线递推估计,得到t 时刻过程参数估计值? ()t θ。最后用最小方差控制律计算控制器参数的新值 ()c t θ,并以此新值去修改控制器的参数,再用控制器在新参数()c t θ下产生的 控制作用()u t ,对过程进行控制。这样的估计和控制过程继续进行下去,直到递推过程参数估计值? ()t θ收敛到它的真值,控制器对过程的控制达到最小方差控制时,自校正调节过程才结束,此时的控制过程达到最优或次最优的特性。 2. 最小方差控制律 考虑一般的随机线性系统 111()()()()()()k A q y t q B q u t C q e t ----=+ 这里u 是控制器,y 是输出,{}()e t 是(0,)N σ独立正态随机变量序列,1q -是后移算符。 假定,,A B C 多项式的系数都是已知的,且在更一般的情形,若1 ()A q -阶数为a n , 1()B q -阶数为b n ,1()C q -阶数为c n ,则1()F q -阶数为1k -,1()G q -阶数为1a n -。 3.最小方差自校正控制器通用程序设计
被控对象:111()()()()()()k A q y t q B q u t C q e t ----=+ 其中:112()1 1.50.7A q q q ---=-+ na=2 1 1 2 ()0.50.40.1B q q q ---=- + nb=2 112()10.80.5C q q q ---=-+ nc=2 {e(t)}为方差为0.1的白噪声。 取期望输出yr(k)为幅值为5的方波信号,采用MVC 算法。 程序如下: a=[1 -1.5 0.7]; b=[0.5 -0.4 0.1]; c=[1 -0.8 0.5]; d=1; %对象参数 na=length(a)-1; nb=length(b)-1; nc=length(c)-1; %na 、nb 、nc 为多项式A 、B 、C 阶次 nf=nb+d-1; %nf 为多项式F 的阶次 L=400; %控制步数 uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i); yk=zeros(na,1); %输出初值 yrk=zeros(nc,1); %期望输出初值 xik=zeros(nc,1); %白噪声初值 yr=5*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; %期望输出 xi=sqrt(0.1)*randn(L,1); %白噪声序列 [e,f,g]=sindiophantine(a,b,c,d); %求解单步Diophantine 方程 for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据 u(k)=(-f(2:nf+1)*uk(1:nf)+c*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g*[y(k);yk(1:na-1)])/f(1);%求控制量 %更新数据 for i=d+nb:-1:2 uk(i)=uk(i-1); end uk(1)=u(k); for i=na:-1:2 yk(i)=yk(i-1); end yk(1)=y(k); for i=nc:-1:2
实验二 模拟控制系统的校正实验
实验二 模拟控制系统的校正实验 一、实验目的 了解校正在控制系统中的作用。 二、实验内容 设计一个串联校正装置来改善系统性能,使其满足指定的指标要求。 1.未校正系统模拟电路 未校正系统的电路图如下图所示: 510k 可得未校正系统的环传递函数为: 5 16 32 8221865 163)() ()(R R R R s C R s C C R R R R R R s U s U s G r c B ++== 注意:式中的负号说明输出与输入反相,即输入输出间的相位差为180°;与系统的稳定性及动态特性无关。 将元器件参数R 1=R 3=R 5=100k Ω,R 6=510k Ω,R 8=240k Ω,C 1=C 2=1μF 代入之后,可得 667 .41961.1667 .411.524.01224.01.5)(2 2++-≈++- =s s s s s G B 上面所得闭环传递函数是未校正系统的理论分析结果,工程实际中为了分析估计的方 便,将开环传递函数近似处理为 ) 15.0(20)151.0(25.2124.01224.01.5228221865 16 3+-≈+-=+-=+-s s s s s s s C R s C C R R R R R R 如此一来,化简之后的未校正系统的闭环传递函数为 40 240 )(2++- =s s s G B 系统的无阻尼自然频率为 )/(324.640s rad n ≈=ω
阻尼比为 158.01 ≈= n ωζ 所以,未校正时系统的超调量为 %5.60605.02 1=≈=-- ζζπ e M p 取误差Δ=0.02,则调整时间为 )(003.44 s t n s ≈= ζω 系统静态速度误差系数K v 等于I 型系统的开环增益,即 20=v K (1/s ) 2.校正后的系统 校正后系统的阶跃响应测试在自制实验电路板上进行,观察、测量并记录校正后的系统在阶跃信号控制下的输出波形,计算时域性能指标。 三、实验仪器 双路输出稳压电源×1 2×1.5V 干电池×1 运算放大器741×3 钮子开关×1 色环电阻×9 电容×2 数字万用表×1 面包板×1 泰克示波器×1 “校正后的系统模拟实验”实验板×1 尖嘴镊子×1 四、数据分析 1.未校正系统电模拟 表1 校正前二阶系统阶跃响应测试数据记录表
最小方差自校正控制系统研究
最小方差自校正控制系统研究 无锡宏源技师学院宗珏 摘要 自校正控制基本思想:参数估计递归方法的基本思想和各种不同类型的控制算法,可以形成一个实时的计算机控制系统控制参数的自动校正。然而,根据不同类型的算法所使用的不同类型的自调优控制系统。自调整控制器自适应控制从理论到实践是最成熟的控制方法之一。 这个课题主要是最小方差自校正控制系统的研究。最小方差自调整控制器参数不变但是未知SISO离散时间系统,输出与最小方差自调优控制律设计为目标,直接使用递归最小二乘算法估计控制器的参数。通过建立最小方差控制系统的结构模型以及广义最小方差控制系统的结构模型;建立起性能指标;在Matlab下对最小方差控制系统及广义最小方差控制系统进行仿真并且对两种仿真结构进行对比分析。 关键词:自校正控制;递推最小二乘法;最小方差控制;广义最小方差控制 1.1研究目的和意义 在如今,自动化水平已成为衡量各行各业现代化的一个重要标志,对连续和现代工业生产,大规模网络的快速发展和自动化方向,控制系统的质量也提出了更高的要求,除了简单的控制系统,各种复杂的、多变量、时变、非线性和随机控制系统研究尤为重要。所以出现了很多新的控制理论和控制理论的不断发展,它跨越学科界限,正朝着控制论和信息论的基础上,仿生智能控制理论发展。因此对这些控制理论的研究和验证是非常必要的。 随着计算机技术的飞速发展,微电子技术、自调优控制应用程序和在理论上取得了很大的进步,它已经成为现代控制理论,在重要领域极为活跃。在应用上,它涉及多方面的工业部门,大大提高了性能指标及产品质量,节约了能源,并且取得了较为显著的效果。在理论研究方面,研究者也取得了一系列有价值的研究成果。 各种自动化工程学院开了自动化研究课程,但随着现代控制理论是抽象,很难结合实际,缺乏一些不错的实验设施,影响教学质量和人才培养质量,和控制方案的确定及其系统设计、参数设定和过程应基于对象的特点,和对象的特征复杂,很难实现,通过理论计算研究完全控制系统设计和控制参数设置,到目前为止仍然是不可能的。 本文研究的对象是最小方差自校正控制系统。最小方差自校正调节器输出根据最小方差自调优控制律,采用递归最小二乘参数估计算法直接估计控制器参数。基于自适应控制、自调优控制和最小方差自校正控制算法推导,建立最小方差控制系统结
广义最小方差直接自校正控制器
广义最小方差直接自校正控制器 clear all;close all; clc a=[1-0.90.8-0.5];b=[12];c=[10.6];d=4; na=length(a)-1;nb=length(b)-1;nc=length(c)-1; nf=nb+d-1;ng=na-1; Pw=1;R=1.5;Q=2;%加权多项式区别于增广最小二乘法中的P np=length(Pw)-1;nr=length(R)-1;nq=length(Q)-1; L=500;%控制步数 uk=zeros(d+nf,1);%输入初值:uk(i)表示u(k-i); yk=zeros(d+ng,1);%输出初值 yek=zeros(nc,1);%最优输出预测估计初值 yrk=zeros(nc,1);%期望输出初值 xik=zeros(nc,1);%白噪声初值 yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];%期望输出xi=sqrt(0.1)*randn(L,1);%白噪声序列 %递推估计初值 thetaek=zeros(ng+nf+nc+2,d); P=10^6*eye(ng+nf+nc+2); time=1:L; for k=1:L y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据 %增广最小二乘 phie=[yk(d:d+ng);uk(d:d+nf);-yek(1:nc)]; K=P*phie/(1+phie'*P*phie); thetae(:,k)=thetaek(:,1)+K*(y(k)-phie'*thetaek(:,1)); P=(eye(na+nb+nc+d)-K*phie')*P; ye=phie'*thetaek(:,d);%最优预测输出可以=yr(k) ge=thetae(1:ng+1,k)';fe=thetae(ng+2:ng+nf+2,k)';ce=[1 thetae(ng+nf+3:ng+nf+nc+2,k)']; if abs(ce(2))>0.9 ce(2)=sign(ce(2))*0.9; end if fe(1)<0.1%设置f0的下界为0.1 fe(1)=0.1; end CQ=conv(ce,Q);FP=conv(fe,Pw);CR=conv(ce,R);GP=conv(ge,Pw); u(k)=(-Q(1)*CQ(2:nc+nq+1)*uk(1:nc+nq)/fe(1)-FP(2:np+nf+1)*uk(1:np+nf). ..