第十一章拱桥施工测量
第十一章拱桥施工测量
现代拱桥主要有三种结构形式:上承式、中承式和下承式。各种不同的结构形式,根据施工技术、机械设备、施工水平和施工现场条件,施工方法可分为:转体法、缆索吊机悬拼法、悬臂法、满铺支架法等。各种施工方法不同,施工测量控制也不一样。都应注意下面几点:
1、拱桥施工前应对拱轴线坐标、设计的预拱度进行复核验算。
2、在每一架设节段做出测量点,并计算出三维坐标,以便于施工放样。
3、用三角高程进行高程放样,要对i角和气象条件进行改正,一般联测己知的
高程控制点利用其差值进行改正。
4、每架设一段拱都要对以前加设的节段进行监测,以便及时调整。
5、拱架设完成后应对拱顶的高程进行监测,以确定气温和新加荷载对拱顶高程
的影响,以利于后续项目的施工。
11.1转体法施工测量
北盘江大桥是水柏线(贵州六盘水~云南柏果)上的控制工程,全长468.20米,其中主跨是236米的上承式铁路单线拱桥,拱轴线为悬链线,拱轴系数M=3.2、矢跨比为1/4,钢管拱截面由两组401000mm×16mm钢管组成,上下游两组钢管拱在空间立面内分别向内旋转6.5。
钢管拱分成长度为7.18.6米之间的38个节断,分别在两岸山坡的膺架上拼装
焊接成整体,然后经转体到跨中合龙,其中六盘水岸逆时针转体135。,柏果岸转体180 1)施工测量精度要求
钢管拱成桥线型为中线限差L/5000土48阻,高程限差L/4000土59mm;拼装时两端口中心坐标误差小于±1mm:半跨成型后钢管拱轴线偏差小于土5皿:合龙后拱顶处轴线限差小于土10mm,高程限差小于±10mm:两岸球饺之间的跨距误差小于土2mm,高差误差小于土2mm。在钢管拱施工中测量的关健是使控制拼装时的拱轴轴线误差小于土5mm。
2)施工控制网布设
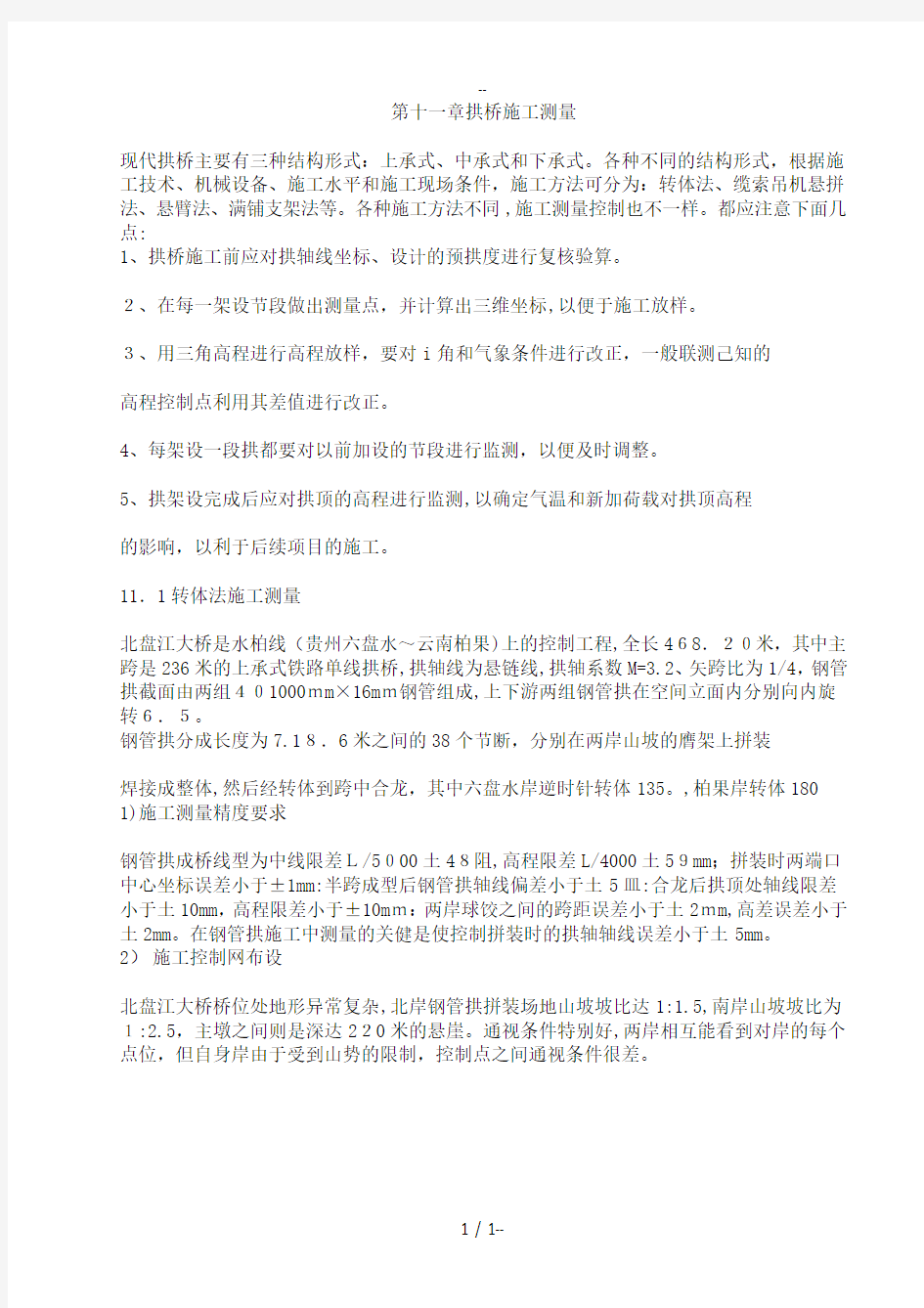
北盘江大桥桥位处地形异常复杂,北岸钢管拱拼装场地山坡坡比达1:1.5,南岸山坡坡比为1:2.5,主墩之间则是深达220米的悬崖。通视条件特别好,两岸相互能看到对岸的每个点位,但自身岸由于受到山势的限制,控制点之间通视条件很差。
甲方只在两岸提供了两个相距约600米的轴线控制点Z D6和Z D7,上面附带高程。经
复测发现其平面距离短了5ID lil,高差不符值则相差60IDlil,无法满足控制点的起算要求,根据钢管拱施工要求的精度,主要考虑到两拱座球绞之间的跨距精度要求(小于土2mm)以及实际的地形和现有的仪器情况,布设了一条逆向精度平面控制网,即以保证两球饺的相对精度为控制目标,而推至起始控制点精度的平面控制网,见下图: 至柏果 ? ZD 7 D ?C ?B A Z D6 ? 至六盘水
桥轴线
以Z凶手日ZD7为起始边,布设一个单三角形:再以ZD7和K2为起始边引两个支
点:S3,S4CS3、S 4为两球饺精度的控制点,分布在靠近球饺附近〉;精确测定S3,但之间的距离,以S4为起点重新改化S3和K2的坐标:以S3和S4为起始边,在南北两岸分别布设两条支导线:S4一-S 3一-A 一-B;S3一-S4一---c 一-D 。二条支导线分别控制两岸钢管拱的拼装,K 2点则控制钢管拱的转体合龙。
高程控制网:取ZD6和ZD7的高差中数重新给予高程值,以ZD 6为起点,用三角高程的方法经K 2将高程传至S 4,以S4为起点用全站仪进行跨河水准将高程传至S3,再经S3、S4将高程传到支导线各点。S3、S4为施工控制网的起始点,其精度高于原始起点ZD6、Z D7这样成桥后可能和两端线路有一个差数,此差数再由线路进行调整。3)施工控制 在拼装中将S3、A 、B 三点坐标旋转135。,S4、C 、D 旋转180。,这样拼装
时的坐标就和成桥时坐标完全一样了。由于球饺的跨距要求较严,在球饺定位后再在球饺上直接架仪器来精确调整跨距。在转体合龙肘,将全站仪器置于眩,在钢管拱两端则固定两个360。全反射棱镜进行跟踪定位,在桥轴线上则置一经纬仪同时监控桥轴线方向
4)精度分析
南北两岸控制网的布设精度一样,现以北岸为例,为保证土5mm的线型控制精度,控制网的布设必需提高一个精度等级,控制在土3mm以内。以S3一-S4为起始边测两条支导线4测回测角、往返测距。M仪=土1''(TC1800L1"2+2ppm),4测回测角的中误差为Mα=M仪/SQRT(4)=M仪/2土0.5”,角度误差引起的点位误差按最不利的情况考虑,即距离S为100米,方位角α分别为90。和180。则:
α90。X=S×cosα+XO求偏导,MX=SQRT(CS×SINα)-2×CMα/206265)-2) MX=SQRT((100×1)《2×(0.5/206265)《2)=土0.24mm MY=O
α=180。时同理可得MY=土0.24mm?MX=O
测距误差中的加常数为2mm可以在仪器上设置常数予以消除,乘常数为2ppm,
支导线距离才100米,乘常数误差则为土0.2mm影响很小,在此不予考虑。
从上分析可知由测边和测角引起的误差很小,可以忽略不计,下面来分析一下对
中误差引起的点位误差:
仪器的对点误差为M仪中为土lm,对中杆对中误差M杆中为土1mm,经S3传
至A点由对中误差引起的点位误差MA=SQRTCM仪中/\2+M杆中/\2)=SQRTCl+1)
=土1.414mm
经A传至B的点位误差MB=SQRT(MA/\2+M仪中/\2+M杆中八2)=SQRTCl.414
/\2+1+1)=土2mm
因此平面控制点点位误差主要是由对中误差引起的,最大为土2mm
在高程传递中采用三角高程式的方法,由于仪器精度较高,距离较短,和平面控制点一样,由于仪器的测角和测距产生的误差很小可以忽略不计,高程点位误差也主要是由于仪器高和对中杆高的量取误差产生的,设仪器高误差M仪高=土1mm,M杆高=土1mm那么经由S3两次传到B点的高程中误差MB高也等于土2阻,三维立体坐标的点位误差M=2×SQRT(2)=2.8土阻,小于土3mm,从上可以看出只要将仪器、目标的对中和高度误差分别控制在土1mm以内,就能满足钢管拱拼装的线型控制要求。
11.2缆索吊机悬拼法
小河桥为沪蓉国道主干线湖北省恩施至利川高速公路第X6合同段中的一座钢管拱桥。本桥主跨为计算跨径338m的上承式钢管混凝土拱桥,主拱圈采用变截面悬链线,拱轴线矢跨比1/5,拱轴系数m=l.543,拱顶截面上、下弦中心高度4.9米,拱脚截面
上下弦杆中心高度7.9m:拱上立柱采用双排钢管混凝土排架,立柱盖梁采用钢箱梁,
拱上桥跨布置为一联18×20m共360m连续小箱梁结构,桥面结构分幅设计:恩施岸侧引桥长6钮,桥跨布置为4×16m连续空心板结构:重庆岸侧引桥长60m,桥跨布置为3×20m 连续小箱梁结构;分左右幅设计。左幅ZK250+599.000 ZK251+098.148,全桥长499.148米。右幅YK.250+566.725 YK.251+070.273,全桥长503.548米。全桥设2% 的单向纵坡及2%的双向横坡。
1)控制网精度控制根据铜管拱施工要求的精度,为了确保拱肋合龙后轴线满足设计要求,采用逆向
精度控制的方法,即小河桥的施工控制网高于设计布设的控制网,设计布设的控制网为一级导线网,而小河桥的施工控制网则按三等控制网技术要求进行布设。
2)钢管拱制造的测量控制
1、施工前应对拱轴线坐标、设计的预拱度进行复核验算,再根据设计图悬链线型参数,在CAD上按l:1的比例绘制悬链线型,与设计图的坐标表相比较,经检验无误方可使用。
2、复核施工线型坐标,根据设计图所给的悬链线坐标及预抬值相加,与放样坐标表相比较,验证线型是否相吻合,并同样按l:1的比例绘制出施工线型坐标图(如下〉,作为后续的拼装放样数据。
(图一〉
3、小拼控制:将(图一)中的每一个节段建立一个独立的坐标系(如下图),截取各特征点的坐标,然后在胎架上进行准确放样,为了减小线型误差,所有的地样坐标均设置在管节接口处,因为此处为标准线型,没有以直代曲造成的线型偏差。单个精片线行拼好后,用水准仪测主弦管的顶面标高确保高差控制在3mm以内。
4、中拼的控制:当单片珩架线型、标高调整到位并焊接到位后,做出珩片的各系
心
A
υ。“, 邸
06
P D
U M
付
4
A M
V A
υ ,1
圳
/
l h
/
A 哇
统线及测量点,主要有立柱排架安装点,平联CK 撑)安装点,拱肋接口系统线〈点〉便于以后的预拼与架设;将调整好的单片椅架吊至中拼胎架,中拼胎架的放样与小拼的放样一致。
y
品价?",L ,.,,,...创) ? x
// b(I0774,117:!)c(l l3!0,!l65) 2(ll 955,55)
(图二〉
5、大拼的控制:大拼按照4+1整体线型将施工线型坐标1:1进行实地的胎架放样,放样数据就是图纸中各节点的坐标(含预拱度),再将加工好的吊装节段吊至胎架上,在对点的过程中要保证每节段钢管拱主弦管上所做的节点与胎架上的地样一一对准,然后通过水准仪检查主弦管顶面标差控制在3mm 以内。 3)钢管拱安装的测量控制
1、缆索吊机的测量控制及监控测量缆索吊机主要由塔架、缆索、锚链和吊装系统组成。塔架的施工测量主要是控制 其垂直度,用极坐标法或用全站仪直接控制其垂度:缆索施工采用悬高法控制其垂度,即置全站仪于控制点上,根据控制点到缆索最低点的理论距离,测出竖直角,计算其高程,调整缆索长度,使其高程及相对高差满足要求。
在缆索吊机试吊和钢管拱肋的吊装过程中,塔架会产生一定的偏移,因此必须对塔架进行跟踪观测,还要监测两岸后锚键的水平位移和高程变化,具体监测内容及方法如下:
(1)塔架]页水平位移和高程。首先在两岸塔架顶部位的中轴线处各设置两个镜(左右侧各一个〉,再置全站仪于控制点上,在空载前测一组初始数据,然后在吊重后及时
测出置镜点的三维坐标与初始值比较,将塔顶的水平位移和高程控制在允许的范围内。(2)缆索吊机后锚破水平位移和高程。首先在两岸后锚链的侧面各预埋两个圆钢
〈左右侧各,圆钢上分出中点并且点朝上),测量方法与塔架的一样,由于后锚链的变化极其微小甚至没有变化,全站仪测出的三维坐标有可能反应不出细微变化,因此在后锚
钝再置一台精密水准仪,对预埋点的高程进行复核,最后测出的结果以水准仪的结果为主,全站仪的结果为辅。
2、扣塔施工测量控制及监控测量
扣塔是扣索的支点,位于两岸主拱座交接墩处,均以钢管柱作为扣塔,钢管柱顶通过分配
梁用万能杆件拼装扣、锚索张拉平台。
在扣塔的施工过程中,主要采用全站仪极坐标法控制其平面位置及其垂直度,用
三角高程法控制扣塔顶面标高。
在拱肋安装的过程中,扣塔会产生一定的偏移,因此必须对塔架进行跟踪观测,还要监测
两岸后锚链的水平位移和高程变化,具体监测内容及方法与缆索吊机的监测内容及方法
一致。
3、拱座拱角位置预埋控制及拱座监控测量
拱座拱角预埋是钢管主拱肋安装前的一项重要的工作,预埋质量将直接影响后续
钢管拱整体安装线型,因此对拱角预埋的测量控制要严格把关。在拱座的施工过程中,由于混凝土浇注体积较大,根据施工要求利川侧拱座一共
分为六次浇注(如下图)。在前四次的测量控制中主要是保证拱座轴线偏位、高程和结
构尺寸在允许的误差范围内,第一次浇注险时,在拱座的侧面预埋各预埋两个圆钢,用来观测拱座的水平位移和下沉,观测方法同缆索吊机后锚键一致,第五、六次的重点就是钢管座和拱脚饺座的预埋。首先在预埋拱脚饺座时按图纸要求将定位骨架在拱座上精确定位,再将拱脚饺座安装在骨架上粗步定位,然后通过定位骨架的微调装置来精确定位,在精确定位的过程中把全站仪架设在恩施岸准确放出饺座的圆心点定在定位骨架的两侧并
拉一条细线,使调整后的饺座圆心与细线重合,再把棱镜架设在校座上直接复测圆心的投影点,保证饺座的三维维坐标与设计一至,最后在左右两侧的饺座都预埋完后,用50米的鉴定钢尺复核两侧的间距保证其相对精度,饺座的预埋精度必须控制在5则以内。
另外在预埋铜管座时,为了保证钢管座与拱肋的弦管顺利衔接,就在每个铜管座的位置预埋一个木桶〈木桶比钢管座一边各大20cm),用全站仪控制木桶角点三维坐
标,待全桥拱肋合龙后再将钢管座放预埋桶内与第一节段主拱肋下端的主弦管一一对
接,保证线型流畅。
拱座及拱脚示意图(图三〉4、钢管主拱肋安装测量控制及监控测量钢管拱肋的安装测量实际上就是控制其中线和高程,一般用极坐标法进行控制。
拱肋安装各测量点精度要求:
在拱肋节段吊装过程中,需要对缆索吊机塔架]页、扣塔顶和钢管拱前端安装的棱镜,用全站仪跟踪测量出各点的三维坐标值,并将塔架顶测量结果与初始资料相比较,尽可能使塔架处于垂直状态,以便在调整拱肋位置的过程中不包含塔架的偏移影响,另外在节段对好点缆索吊机松勾后使扣索、锚索带上劲(此时需注意松勾后钢管拱肋前端的标高只能略低于设计标高〉,再通过张拉扣索、锚索来往上微调,在微调的过程中要随时观测扣塔顶部的偏位,要保证在扣塔垂直的情况下将吊装节段的三维坐标调整到设计值〈钢管拱肋的安装精度为:轴线偏位L/6000,拱圈高程土L/3000),当吊装节段调好后必须要把前面架好的每一节段测一组数据与没有安装时的数据比较,测出此节段安装后,前面几节段相应的下沉量,并提拱给监控单位使其提供下一节段的施工预拱度。使特别需要注意的是,拱肋的计算资料应考虑预拱值。
5、合龙段测量控制
合龙前对拱肋进行全面的线形、位置测量,并进行调整,当线形满足精度要求后,对拱肋和合龙口进行不少与24小时的连续观测,确定温度的影响,并绘制一个反映升温和降温过程中的影响的“温度一绕度”曲线,以及反映合龙口宽度变化的“温度一悬臂端点挠度"的关系曲线,在此基础上进行温度修正,确定合龙段的长度和最佳合龙时间段。设计合龙泪度在12°c左右,不得高于15。C。
合龙后对拱肋位置及线形进行精测,按照相关规范及设计要求,通过扣索和拱]页
合龙装置进行精调,调整合格后固定合龙装置,焊接各扣段连接焊缝,完成拱肋的正式合龙。
11.3悬臂法
11.3.1悬臂浇筑法
大跨度连续刚构桥的上部构造即主梁的施工,常采用挂篮悬臂浇筑法施工,即每浇筑一块箱梁,达到强度后就进行钢绞线穿束手日预应力张拉,然后前移挂篮,浇筑下一块箱梁,周而复始直至合龙。在大跨度连续刚构桥挂篮悬臂浇筑法施工过程中,由于跨度大和悬臂长,主梁的扰度变形是显著的,既有重力引起的向下扰度变形,又有张拉力引起的向上的扰度变形,还有温度变化引起的扰度变形。这种扰度变形在大跨度连续刚构桥上部构造施工过程中,虽然设计上已经给出各种工况下变形值,但由于各种原因实测与设计值并不相符,而采用对其进行监测,并在计算下一节段箱梁放样标高时考虑改正,这样就能保证对向施工悬臂段的竖向合龙精度,从而确保成桥线形、内力和施工质量,因此主箱梁施工变形监测在大跨度连续刚构桥施工中线形占有极其重要的地位。
珠江特大桥箱梁施工实例
1.概况
珠江特大桥是广州南部地区快速路干线上的一座特大桥。大桥的主桥结构采用138m+250m+138mPC连续刚构(图一),横向分左右两幅。半幅桥宽16.5m,单箱单室断面,其中箱宽是7.8m,两侧悬臂翼缘板宽4.35m,箱梁根部梁高13.8m,跨中及边跨端部梁高4.30m。箱梁的梁高采用1.6次抛物线。箱梁底板厚度也是采用1.6次抛物线,由箱梁根部130cm渐变到跨中32cm。箱梁底板横向阳花保持水平,由腹板高度调整梁面
横坡,]页板横向设置2%的横坡。连续刚构箱梁施工方法是采用挂篮移动悬臂挠筑法,因此线形控制是该桥测量控制的关键。线形控制是指箱梁高程线形和箱梁平面线形控制,由于本桥为直线桥,平面线形控制不是重点,按施工规范要求施测即可。
图一:珠江特大桥桥形示意图
11#越攻
138町、?250m ?12#综生138何可
2.施工测量局部控制网的建立和施测
设计单位提供的珠江大桥控制网是一个导线控制网〈带高程GPS网)。南北两岸各有两个控制点。根据本桥控制网的特点,在两主墩承台施工完后利用平面控制点DD4-14和DD4-14-1用双站极坐标法作出承台上两主墩中心平面位置〈图二)。以两主墩中心点为局部控制点贯通全桥。因珠江特大桥主桥部分位于直线上,用两主墩中心点分别作两主墩左右幅中点。以左右幅中点连线为桥轴线方向线分别在两主墩及过渡墩承台上作左右幅箱梁施工轴线方向(用固定规标)及加密平面控制点。高程控制由于两主墩离岸边近80m 左右,离控制点近150m左右,按三等水准测量方法分别把两岸水准控制点引测到主墩承台上。为了保证现浇悬臂部分的相对精度,对两主墩承台上的水准点进行跨河联测(三等)。把两主墩承台的点作为局部高程控制点。待0#块施工完毕后采用悬挂钢尺(为鉴定钢尺,加尺长改正)两台水准仪方法施测(承台顶标高
+8m,0#号块顶标高+57时,变换仪器高和钢尺的位置四测因将承台水准控制点引测到0#块上,作为现浇悬臂部分的高程控制点。
图二:珠江特大桥控制网及局部控制网示意图
10持墩11抖墩?2
1#墩
?
13抖墩
N
DD4-14-2
DD4-
-- 3. 0#块施工及观测基准点施测
3.10#块施工
主墩墩身施工达到设计标高,进入0#块的施工阶段。因0#块是在两立柱间采用固定支架施工,所以直接利用承台高程点用倒挂钢尺法控制0#块底板标高。用承台上同幅方向控制点直接测出底板上墩的中心点及桥轴线方向。并根据所测放的点用钢尺放样0#块的内外边墙的位置。由于0#块的高度达13.8m,所以在施工中应注意控制模板的倾斜度。根据顶板在桥的纵向和横向都有坡度的特殊情况。在施工中应分别控制各部分主要点的高程。
3.2?0#块观测基准点施测
在0#块浇筑前,根据施工需要在在其横向轴线上埋设三个水准点,作为高程传递的基准点(如图三所示)。0#块浇筑完毕后,待强度达到要求后对基准点进行高程施测,高程施测可根据承台上的水准控制点用悬挂钢尺法精确将水准点传递到?0#块上,同时在两主墩上用全站仪TC1610往返测,三角高程来检核。
因三
标高观测点布置图
标高观测点
3.3 各节段高程观测点布设
0#块施工完毕后,在各节段梁的施工中,为了有效地对线形进行控制,应在距各
节段梁前端约lOcm处理设高程观测点,观测点的埋设位置与0#块一致。4. 其它节段线形测控
4.1立模标高的确定
节段梁立模标高受挂篮的变形、节段梁自重、预应力大小、施工荷载、结构体系转换、收缩徐变、日照及温度的变化等诸多方面的影响(可把这些因素产生的变形记为H变)。而这些影响须多次观测才能较好地掌握其变化范围,为立模提供参考。因此立模标高可用下式表达:
H理H设+H预+H变
H理为立模的计算理论标高:
H设为提供的成桥后设计标高:
H预为提供的预拱度值:
H变为其他各方面因素的影响值,包括挂蓝变形和温度、大气的影响。
在上式中,H设及H预由设计单位提供,而H变则是多方面影响叠加产生的累积竖向位移,该数值须经对己浇筑节段梁的各工况观测后,同时主要是参考前一节段梁的位移来确定,因此对节段梁进行各阶段观测是获取该数据参考值的主要手段。
4.2?三阶段测量
三阶段测量观测方法及观测范围如图四所示,其具体含义如下:
第一阶段:挂篮移动后,立模,调整到H理,测现浇段:
第二阶段:浇筑完毕,张拉预应力之前,测现浇段:
第三阶段:张拉预应力之后,测现浇和己浇段:测己浇段主要是分析其线形走向,为
下一节段梁立模提供依据。
民l四=观测点示悲剧
在是直芷移动后·
1、捞钱草草移动就位、榄板安较完毕$
2、测量位笠如l罔所未.
张位预股力育苗:
1、指本节段张位预应为西B'
2、测量位5空如1网所示a
张位预殷为后-