非线性系统
什么是非线性控制系统?
时间:2009-08-28 08:36:32 来源:作者:
非线性控制系统nonlinear control system
非线性控制系统是指变量的输出相对于输出的运动特性不能用线性关系来描述的控制系统。
非线性控制系统
nonlinear control systems
状态变量和输出变量相对于输入变量的运动特性不能用线性关系描述的控制系统。非线性控制系统的形成基于两类原因,一是被控系统中包含有不能忽略的非线性因素,二是为提高控制性能或简化控制系统结构而人为地采用非线性元件。
非线性系统的分析远比线性系统为复杂,缺乏能统一处理的有效数学工具。在许多工程应用中,由于难以求解出系统的精确输出过程,通常只限于考虑:①系统是否稳定。②系统是否产生自激振荡(见非线性振动)及其振幅和频率的测算方法。③如何限制自激振荡的幅值以至消除它。现代广泛应用于工程上的分析方法有基于频率域分析的描述函数法和波波夫超稳定性等,还有基于时间域分析的相平面法和李雅普诺夫稳定性理论等。这些方法分别在一定的假设条件下,能提供关于系统稳定性或过渡过程的信息。
在某些工程问题中,非线性特性还常被用来改善控制系统的品质。例如将死区特性环节和微分环节同时加到某个二阶系统的反馈回路中去,就可以使系统的控制既快速又平稳。非线性控制系统在许多领域都具有广泛的应用。除了一般工程系统外,在机器人、生态系统和经济系统的控制中也具有重要意义。
[编辑]补充
非线性控制系统
nonlinear control systems
状态变量和输出变量相对于输入变量的运动特性不能用线性关系描述的控制系统。非线性控制系统的形成基于两类原因,一是被控系统中包含有不能忽略的非线性因素,二是为提高控制性能或简化控制系统结构而人为地采用非线性元件。
非线性系统的分析远比线性系统为复杂,缺乏能统一处理的有效数学工具。在许多工程应用中,由于难以求解出系统的精确输出过程,通常只限于考虑:①系统是否稳定。②系统是否产生自激振荡(见非线性振动)及其振幅和频率的测算方法。③如何限制自激振荡的幅值以至消除它。现代广泛应用于工程上的分析方法有基于频率域分析的描述函数法和波波夫超稳定性等,还有基于时间域分析的相平面法和李雅普诺夫稳定性理论等。这些方法分别在一定的假设条件下,能提供关于系统稳定性或过渡过程的信息。
在某些工程问题中,非线性特性还常被用来改善控制系统的品质。例如将死区特性环节和微分环节同时加到某个二阶系统的反馈回路中去,就可以使系统的控制既快速又平稳。非线性控制系统在许多领域都具有广泛的应用。除了一般工程系统外,在机器人、生态系统和经济系统的控制中也具有重要意义。
非线性控制系统
nonlinear control systems
状态变量和输出变量相对于输入变量的运动特性不能用线性关系描述的控制系统。线性因果关系的基本属性是满足叠加原理(见线性系统)。在非线性控制系统中必定存在非线性元件,但逆命题不一定成立。描述非线性系统的数学模型,按变量是连续的或是离散的,分别为非线性微分方程组或非线性差分方程组。非线性控制系统的形成基于两类原因,一是被控系统中包含有不能忽略的非线性因素,二是为提高控制性能或简化控制系统结构而人为地采用非线性元件。
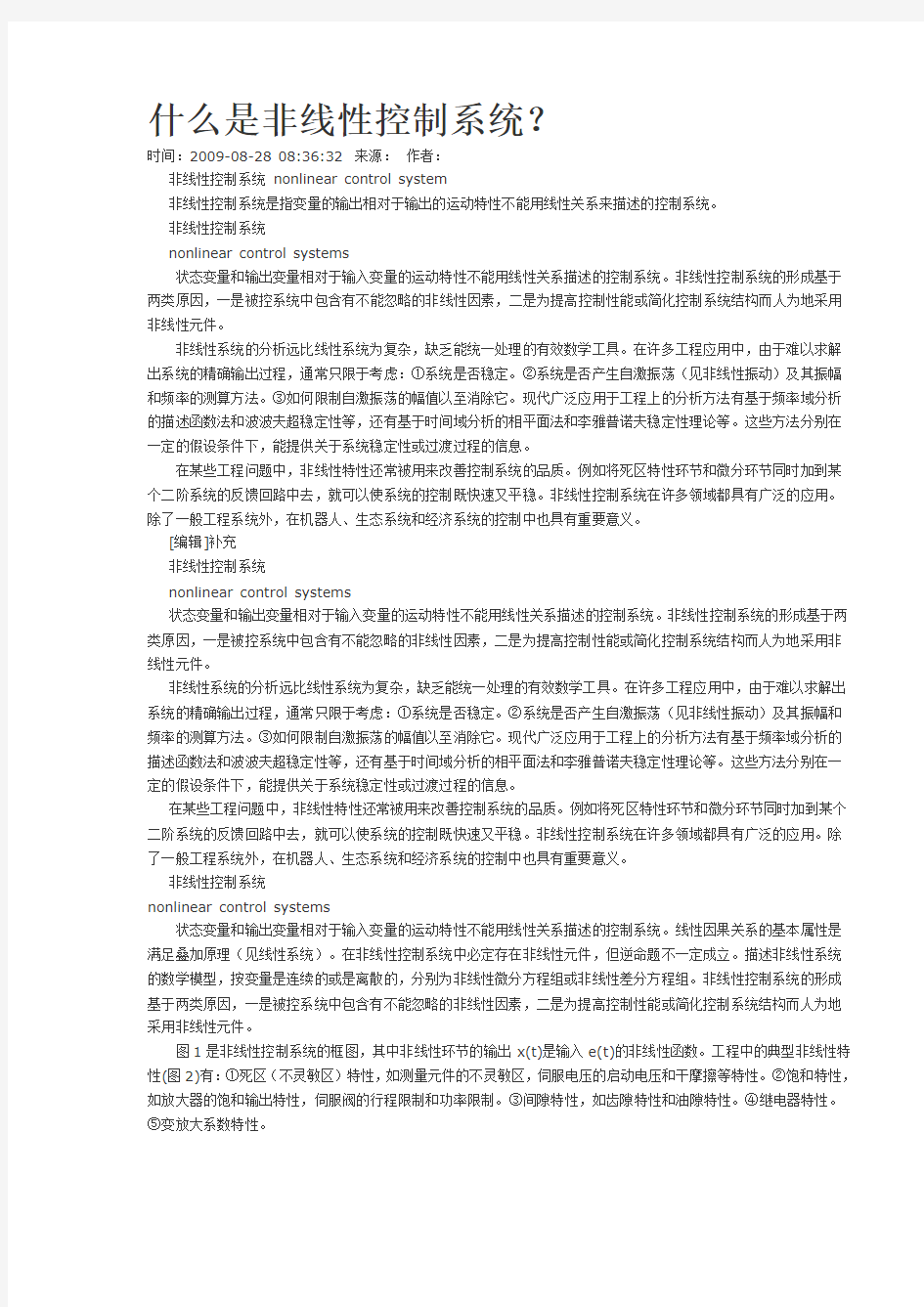
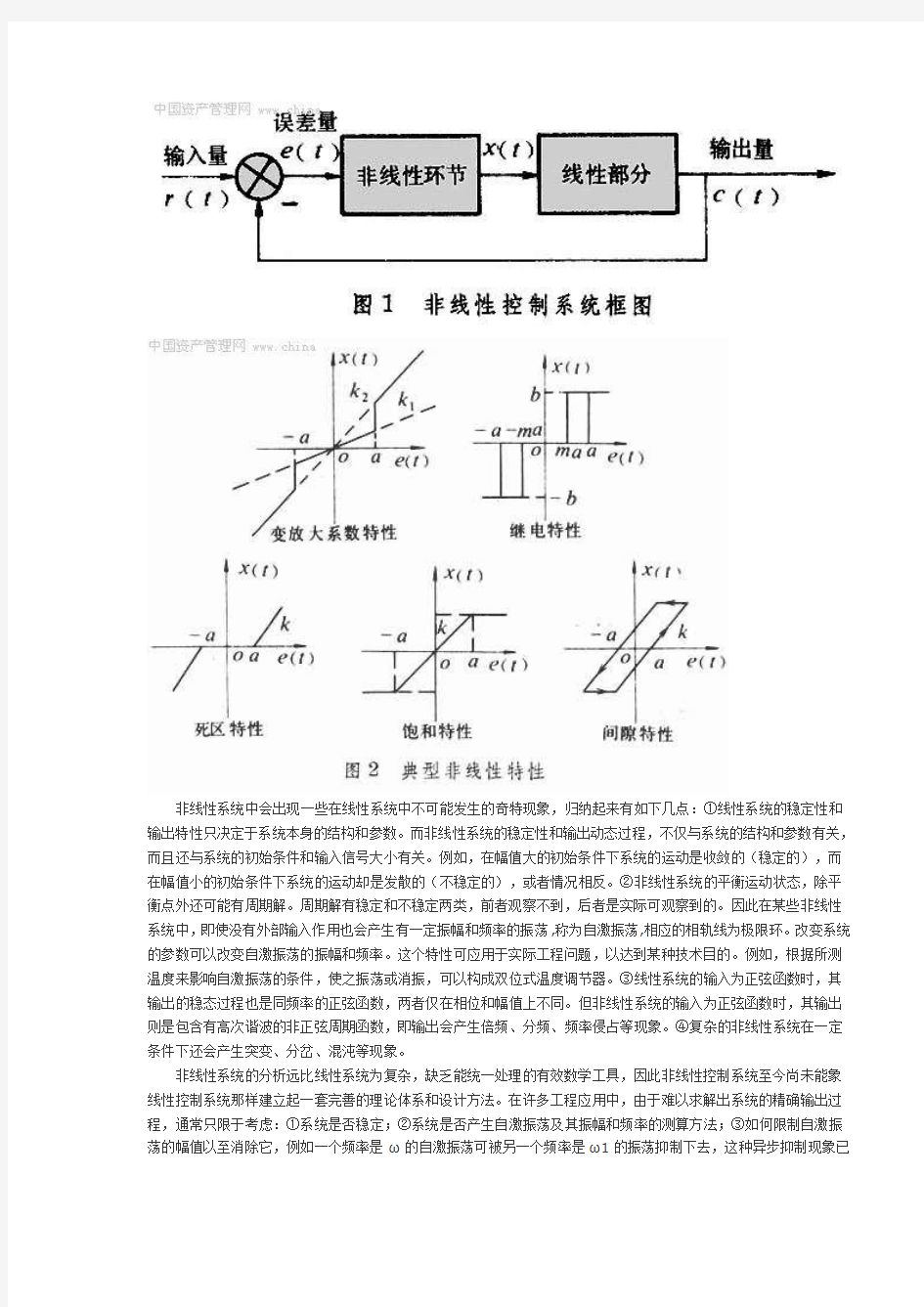
图1是非线性控制系统的框图,其中非线性环节的输出x(t)是输入e(t)的非线性函数。工程中的典型非线性特性(图2)有:①死区(不灵敏区)特性,如测量元件的不灵敏区,伺服电压的启动电压和干摩擦等特性。②饱和特性,如放大器的饱和输出特性,伺服阀的行程限制和功率限制。③间隙特性,如齿隙特性和油隙特性。④继电器特性。
⑤变放大系数特性。
非线性系统中会出现一些在线性系统中不可能发生的奇特现象,归纳起来有如下几点:①线性系统的稳定性和输出特性只决定于系统本身的结构和参数。而非线性系统的稳定性和输出动态过程,不仅与系统的结构和参数有关,而且还与系统的初始条件和输入信号大小有关。例如,在幅值大的初始条件下系统的运动是收敛的(稳定的),而在幅值小的初始条件下系统的运动却是发散的(不稳定的),或者情况相反。②非线性系统的平衡运动状态,除平衡点外还可能有周期解。周期解有稳定和不稳定两类,前者观察不到,后者是实际可观察到的。因此在某些非线性系统中,即使没有外部输入作用也会产生有一定振幅和频率的振荡,称为自激振荡,相应的相轨线为极限环。改变系统的参数可以改变自激振荡的振幅和频率。这个特性可应用于实际工程问题,以达到某种技术目的。例如,根据所测温度来影响自激振荡的条件,使之振荡或消振,可以构成双位式温度调节器。③线性系统的输入为正弦函数时,其输出的稳态过程也是同频率的正弦函数,两者仅在相位和幅值上不同。但非线性系统的输入为正弦函数时,其输出则是包含有高次谐波的非正弦周期函数,即输出会产生倍频、分频、频率侵占等现象。④复杂的非线性系统在一定条件下还会产生突变、分岔、混沌等现象。
非线性系统的分析远比线性系统为复杂,缺乏能统一处理的有效数学工具,因此非线性控制系统至今尚未能象线性控制系统那样建立起一套完善的理论体系和设计方法。在许多工程应用中,由于难以求解出系统的精确输出过程,通常只限于考虑:①系统是否稳定;②系统是否产生自激振荡及其振幅和频率的测算方法;③如何限制自激振荡的幅值以至消除它,例如一个频率是ω的自激振荡可被另一个频率是ω1的振荡抑制下去,这种异步抑制现象已
被用来抑制某些重型设备的伺服系统中由于齿隙引起的自振荡。
在工程上还经常遇到一类弱非线性系统,即特性和运动模式与线性系统相差很小的系统。对于这类系统通常以线性系统模型作为一阶近似,得出结果后再根据系统的弱非线性加以修正,以便得到较精确的结果。摄动方法是处理这类系统的常用工具。而对于本质非线性系统,则需要用分段线性化法等非线性理论和方法来处理。
现代广泛应用于工程上的分析方法有基于频率域分析的描述函数法和波波夫超稳定性等,还有基于时间域分析的相平面法和李雅普诺夫稳定性理论等。这些方法分别在一定的假设条件下,能提供关于系统稳定性或过渡过程的信息。而计算机技术的迅速发展为分析和设计复杂的非线性系统提供了有利的条件。
在某些工程问题中,非线性特性还常被用来改善控制系统的品质。例如将死区特性环节和微分环节(见控制系统的典型环节)同时加到某个二阶系统的反馈回路中去,就可以使系统的控制既快速又平稳。又如,可以利用继电特性来实现最速控制系统。
非线性控制系统在许多领域都具有广泛的应用。除了一般工程系统外,在机器人、生态系统和经济系统的控制中也具有重要意义。
控制方法定义
1.多模态控制系统:主要是基于变结构、自适应、分级模糊控制策略。首先,根据被控对象性能指标构
造模糊变量集,再由该变量集构造模糊控制规则集并由此改变分级模糊控制的控制参数。在此基础上
该系统辅以变结构及自适应控制使控制系统在大幅度改变给定值,及系统参数大幅度变化时,以改善
系统控制品质。该系统实际应用于电加热渗碳炉的温度控制并收到较好的控制效果。
2.
非线性控制系统
第2篇 先进控制控制系统 第8章 非线性控制系统 前面的章节所讨论的都是线性系统,但是实际上,大多数物理过程都具有一 定程度的非线性。即使如此,如果系统的非线性程度不高,或者仅存在于较窄的操作范围内,可将其近似为一个线性系统来进行处理,则前面所讨论的控制技术,例如常规PID 控制仍旧是有效的。但是对于一些具有不可忽视的非线性的过程,这种方法就不适用了。这种情况下,采用非线性控制策略能进一步提高控制品质。 随着控制理论的进展,自动化技术工具的发展,尤其是计算机的使用,使非 线性控制系统在工业控制中逐步多了起来。如果对非线性控制系统粗略地进行分类,可以分为两类:一类过程是线性的(或近似按线性处理),为了满足控制系统的某种要求或改善控制系统质量而引入非线性的控制规律;另一类过程本身是非线性的,引入非线性的补偿元件或控制规律,以达到系统规定的控制指标。 8.1 线性过程的非线性控制 8.1.1 液位的非线性控制 (1)均匀控制的实现 在均匀控制系统一节中,曾提到可以采用非线性控制规律来实现均匀控制,其中最常用的是采用带不灵敏区的非线性控制。这种带不灵敏区的非线性控制规律如图8-1所示。当系统偏差e 在不灵敏区内,控制器的增益很小,即δ很大;偏差e 超出不灵敏区后,控制器增益将增大(增大十倍或更多)。 利用非线性控制规律实现均匀控制的原理较简单, 只要根据工艺允许的液位波动范围,合理设置不灵敏 区宽度,就能做到在较小的外扰作用下,使液位偏差 信号在不灵敏区内变化,非线性控制器工作在小增益 区域,从而输出变化不大,控制阀的开度变化也不大, 流量仅仅在小范围内波动。也就是说,液位在允许范 围内波动的同时,流量不至于有较大的变化,达到液 位和流量的均匀控制。只有在较大的外扰作用进入系 统时,液位偏差信号一旦超出不灵敏区,非线性控制 器才工作在高增益区域,其控制作用有一个较大的输 出变化,使流量也产生一个较大的变化。但这种作较大变化的时间是短暂的,因为较强的控制作用驱使流量作较大的变化,可以很快地把液位偏差信号拉回到不灵敏区,于是整个系统又回复到上述的不灵敏区内的工作情况。因此,这种非线性液位控制系统经常工作在不灵敏区范围内,液位和流量均在小范围内波动,仅仅为了有力地克服大扰动作用,系统才工作在高增益区,造成流量的较大波动,但这种情况是不太多的,维持的时间也是较短的。实际系统的组成可采用单回路控制或非线性串级控制等形式,其系统构成分别示于图8—2(a)、(b)。引入非线性串级均匀控制,有利于减少流量的波动,适用于控制阀前后压力波动较大的场合。 e 比例部分的输出特性
非线性系统的一些动力学与控制问题
釜七届全国非线性动力学学术会议和第九届全国非线性振动学术会议论文集南京,200410.28-29复杂非线性系统的一些动力学与控制问题。 陆启韶王士敏 f北京航空航天大学理学院北京10083) E-mail:qishaolu(岔hotraail.eom 摘要本文根据非线性动力学的研究现状和发展趋势,对复杂非线性系统动力学与控制的理论和应用研究中的一些重要问题进行探讨和展望 关键词非线性,复杂系统,动力学,控制 前言 非线性动力学研究非线性系统丰富的运动模式和演化过程,是非线性科学技术的重要理论基础。非线性动力学研究的最终目的在于深刻揭示非线性世界的复杂性和多样性。非线性系统运动的复杂性来源于多个方面,例如几何关系、本构关系、约束条件、拓扑结构、激励因素、耦合方式、时空尺度、演化机理等,它们都会带来复杂的运动模式。30多年来,尽管非线性动力学对单自由度简单振动系统和低维映射系统的研究已经取得一系列重要成果,发现了大量新的非线性现象。提出并发展了基本的理论方法,但是面对在理论和应用研究中遇到的高维复杂系统问题往往束手无策,仍然缺乏有效的分析策略和手段。因此,复杂非线性系统研究已成为当务之急。 本文根据当前非线性动力学的研究现状和发展趋势,针对复杂非线性系统动力学与控制的理论和应用研究中的一些重要问题进行探讨和展望,希望引起同行关注,共同开创该方面研究的新局面。1.多自由度非线性系统组合振动、全局分析和同步实际非线性振动系统通常是多自由度的,且存在多种外界激励,因此组合振动和模态相互作用是普遍的重要现象。对单自由度系统来说,组合共振只能在多种激励并存的情形下出现。但是对多自由度系统,由于可以存在内共振和自参数共振机理,因 ’国家自然科学基金(10172011)资助项目此在单个激励作用下也可能发生组合共振。内共振(或自参数共振)发生在其线性化系统的各模态的固有频率可以通约或接近通约的情况,其类型依赖于非线性项形式和相应的分岔类型。在没有内共振时,系统的共振响应只包含由外部激励直接激发的主共振或亚,超谐共振模态。但是内共振会引起与非线性项有关的间接激发模态,并导致多模态相互作用,产生诸如饱和、跳跃、锁相、周期调制、混沌调制等复杂现象,造成弹性结构中由高频激励引起的低频大幅共振事故。现在对多自由度系统的组合振动和模态相互作用动力学研究已经取得一些重要成果,并且扩展到梁、板、壳、弦线、悬索、传送带、流一固耦合结构等系统,涉及不同的本构关系(包括粘弹性材料、复合材料、智能材料等)、约束条件和控制方式,成为十分活跃的研究方向。但是,目前这方面的研究主要局限于具体问题,对于组合振动的一般规律和分析方法仍有待于深入探讨。 高维非线性振动系统的全局动力学分析是十分重要且难度很大的问题。目前仍然主要依靠数值模拟手段.成功地用于全局分析的理论方法不多,主要是高维Melnikov方法和Shilnikov方法。近年来,人们发现了大重新的非线性动力学现象,除了混沌激变、瞬态混沌、奇怪混沌不变集之外,还有超混沌、Wada吸引域、筛形吸引域、混沌鞍等,需要从机理上予以明确阐述。因此,当务之急是将动力系统理论、强非线性系统
分析非线性系统的方法
非线性系统稳定性问题的判定方法和发展趋势 任何一个实际系统总是在各种偶然和持续的干扰下运动或工作的。所以,当系统承受干扰之后,能否稳妥地保持预订的运动轨迹或者工作状态,即系统的稳定性是首要考虑的。一个系统的稳定性,包括平衡态的稳定性问题和任一运动的稳定性问题。而对于给定运动的稳定性可以变换成关于平衡点的稳定性问题。 对平衡点的稳定性进行分析可将平衡点的稳定性定义为李雅普诺夫稳定、一致稳定、渐进稳定、一致渐近稳定、按指数渐进稳定和全局渐进稳定,除了全局渐进稳定,其他都是局部的概念。 非线性系统的数学模型不满足叠加原理或其中包含非线性环节。包括非本质非线性(能够用小偏差线性化方法进行线性化处理的非线性)和本质非线性(用小偏差线性化方法不能解决的非线性)。它与线性系统有以下主要区别: 1.线性控制系统只能有一个平衡点或无穷多的平衡点。但非线性系统可以有一个、二个、多个、以至无穷多个平衡点。非线性系统与线性定常系统明显不同,其稳定性是针对各个平衡点而言的。通常不能说系统的稳定性如何,而应说那个平衡点是稳定的或不稳定的。2.在线性系统中,系统的稳定性只与系统的结构和参数有关,而与外作用及初始条件无关。非线性系统的稳定性除了与系统的结构和参数有关外,还与外作用及初始条件有关。 由于非线性控制系统与线性控制系统有很大的差异,因此,不能直接用线性理论去分析它,否则会导致错误的结论。对非线性控制系统的分析,还没有一种象线性控制系统那么普遍的分析、设计方法。 现代广泛应用于非线性系统上的分析方法有基于频率域分析的描述函数法和波波夫超稳定性,还有基于时间域分析的相平面法和李雅普诺夫稳定性理论等。这些方法分别在一定的假设条件下,能提供关于系统稳定性或过渡过程的信息。而计算机技术的迅速发展为分析和设计复杂的非线性系统提供了有利的条件。另外,在工程上还经常遇到一类弱非线性系统,即特性和运动模式与线性系统相差很小的系统。对于这类系统通常以线性系统模型作为一阶近似,得出结果后再根据系统的弱非线性加以修正,以便得到较精确的结果。摄动方法是处理这类系统的常用工具。而对于本质非线性系统,则需要用分段线性化法等非线性理论和方法来处理。目前分析非线性控制系统的常用方法如下: 1、线性化方法 采用线性化模型来近似分析非线性系统。 这种近似一般只限于在工作点附近的小信号情况下才是正确的。这种线性化近似,只是对具有弱非线性(或称非本质非线性)的系统。 常用线性化方法,有正切近似法和最小二乘法。 此外,对一些物理系统的非线性特性比较显著,甚至在工作点附件的小范围内也是非线性的,并且不能用一条简单的直线来代表整个非线性系统特性的系统,可采用分段线性化方法。2、相平面法 相平面法是一种基于时域的分析方法,一种用图解法求解一、二阶非线性常微分方程的方法。 该方法通过图解法将一阶和二阶系统的运动过程转化为位置和速度平面上的相轨迹,从而比较直观、准确地反映系统的稳定性、平衡状态和稳态精度以及初始条件及参数对系统运动的影响。相轨迹的绘制方法步骤简单、计算量小,特别适用于分析常见非线性特性和一阶、二阶线性环节组合而成的非线性系统 对于分段线性的非线性系统来说,相平面分析法的步骤为: (1)用n条分界线(开关线,转换线)将相平面分成n个线性区域;(2)分别写出各个线性区域的微分方程;(3)求出各线性区的奇点位置并画出相平面图;
非线性振动
非线性振动的研究包括理论分析方法和数值分析方法。其中理论分析方法有是沿着两个方向发展,第一是定性方法,第二是定量方法,也称为解析法。 定性方法是对方程解的存在性、唯一性、周期性和稳定性等的研究;定量方法是对方程解的具体表达形式、数量大小和解的数目等的研究。数值方法目前已广泛用于计算非线性振动系统,是一种求解非线性方程的有效方法。 本文在查询相关文献的基础上,对非线性振动理论的分析方法最新研究成果做简要概括和分析比较。 1、平均法 平均法是求解非线性振动最常见和最实用的近似方法之一。其基本思想是设待解微分方程与派生方程具有相同形式的解,只是振幅和相位随时间缓慢变化。将振幅和相位的导数用一个周期的平均值替代,得到平均化方程,求解平均化方程,得到振幅和相位的表达式,从而求解出原方程的近似解析解。 1.1利用平均法分析多自由度非线性振动 平均法主要是用在单自由度非线性振动的分析中,是一种求近似解的方法,虽然精度较低,但可避免繁琐的中间运算,具有便于应用的突出优点。将其推广的到多自由度系统,导出了平均化方程,由此能够得到多自由度非线性振动的幅频特性。 1.2用改进平均法求解自由衰减振动 用平均法求解自由衰减振动方程时,无论是线性阻尼还是平方阻尼,
在阻尼常量很小的情况下,平均法解均有较高的精度。但随阻尼常量的增加,阻尼对振动周期的影响已不能忽略,此时平均法解的结果与实际振动情况有了明显的偏离,需要改进。改进平均法是将待解微分方程的圆频率与派生方程圆频率的差异函数表示为阻尼系数的多项式。 2、FFT多谐波平衡法分析非线性系统 非线性动力系统的响应可能含有几个主导频率,且有可能与激振频率不成倍数关系。现有的单一谐波法和多谐波法仅限于系统响应主导频率为激振频率的非线性系统,因此在某些情况下使用单一谐波法或多谐波法研究非线性系统动力学特性是不可靠的,而基于快速傅立叶变换(FFT)和主导频率的 FFT 多谐波平衡法能够依据所有的主导频率构筑多谐波平衡方程,因此其解析解精确度高,并能广泛适用于单倍周期、多倍周期、与初始条件有关的多解性及拟周期响应等典型的非线性特征响应。 3、等效小参数法求解强非线性系统 等效小参量法是将谐波平衡法和扰动法相结合用于求高阶非线性系 统近似解的一种比较有效的方法,这种方法不仅适用于弱非线性系统,而且适用于强非线性系统,其近似解能较好地反映系统特性。在求解弱非线性系统时,扰动法和等效小参量法均具有较高的精确度,但对于强非线性系统,等效小参量法表现出较明显的优势。 参考文献: 【1】王海期.非线性振动.高等教育出版社.1992
非线性系统例题
第十章非线性系统 §10.1 与线性系统的差异 线性系统与非线性系统的不同之处在于: 1. 非线性系统的运动是由一个非线性微分方程控制的,但是很多非线性方程都不存在精确解。 2. 一个非线性系统可能不只一个平衡点,而平衡点可能是稳定的,也可能是不稳定的。 3. 非线性系统是否存在稳态运动取决于初始条件。 4.非线性系统的自由振动周期由初始条件决定,这就意味着自由振动的频率依赖于自由振动的振幅。 5. 非线性系统的共振出现在激发频率不同于系统的线性固有频率处,在一个三维非线性系统中,当激发频率为系统线性固有频率的1/3时,产生超频共振;当激发频率为系统线性固有频率近三倍时,就产生亚频共振。 6. 线性叠加原理不能用来分析受多频激励的非线性系统,共振的组合是对应于激发频率的近似组合。 7. 对应于固有频率的近似组合,在多自由度的连续系统中存在内共振。 8. 在非线性系统中,周期激励可能会引起非周期响应,由于一些特定的参数值,这种混沌运动出现在很多非线性系统中。 §10.1 定性分析 状态平面或相位平面是速度和位移在整个运动过程中的关系曲线,通过在平衡点的邻域内将控制微分方程线性化,可以检验平衡点的性质及其稳定性(见题10.2),平衡点的各种类型如图10.1所示。
§10.3 达芬方程 达芬方程 rt F sin 23=+++εχχχμχ (10.1) 是一个无量纲方程。它作为一个模型可用于求解三维非线性系统。如果ε为正,则表示一个硬弹簧的响应;如果ε为负,则表示一个软弹簧系统的响应。一个系统自由振动的振幅关系由达芬方程决定,它可以用扰动方法近似表示为: )(8 3 122εεωO A ++= (10.2) 其中ω是固有频率的无量纲化(对于线性系统ω=1),A 是振幅,分析共振附近达芬方程的受迫响应可以设
【CN109934484A】一种基于非线性FCE的INSUSBL组合导航系统性能评估方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910176340.2 (22)申请日 2019.03.08 (71)申请人 哈尔滨工程大学 地址 150001 黑龙江省哈尔滨市南岗区南 通大街145号哈尔滨工程大学科技处 知识产权办公室 (72)发明人 程建华 董铭涛 董萍 康瑛瑶 孙湘钰 刘萍 蔡静 (51)Int.Cl. G06Q 10/06(2012.01) (54)发明名称一种基于非线性FCE的INS/USBL组合导航系统性能评估方法(57)摘要本发明属于卫星导航领域,具体涉及一种基于非线性FCE的INS/USBL组合导航系统性能评估方法,包括下列步骤:建立INS/USBL组合导航系统指标体系以及评语等级;计算基于隶属度函数的评判矩阵;计算组合导航系统权值向量C;综合评判及归一化;计算评估等级区间量化值。本发明利用非线性FCE对INS/USBL组合导航系统开展性能评估,并设计了INS/USBL组合导航系统三层次指标体系,从器件级误差对组合导航系统性能评估,并设计了基于非线性模糊算子的非线性FCE,该方法能够科学的定量评估INS/USBL组合 导航系统。权利要求书2页 说明书5页 附图2页CN 109934484 A 2019.06.25 C N 109934484 A
1.一种基于非线性FCE的INS/USBL组合导航系统性能评估方法,其特征在于,包括下列步骤: (1)建立INS/USBL组合导航系统指标体系以及评语等级; (2)计算基于隶属度函数的评判矩阵; (3)计算组合导航系统权值向量C; (4)综合评判及归一化; (5)计算评估等级区间量化值; (6)对导航系统性能做综合评估。 2.根据权利要求1所述的一种基于非线性FCE的INS/USBL组合导航系统性能评估方法,其特征在于,所述建立INS/USBL组合导航系统指标体系以及评语等级,包括: 建立INS/USBL组合导航系统三层次指标体系,从底层至项层依次为器件层、指标层以及精度层,取指标层指标集为U以及器件层指标集为u i ; U={u 1,u 2,u 3}={INS,USBL,滤波器}、u i ={u i1,u i2,...,u im }; 其中,元素u im 表示第i个元素的第m个子元素,m由器件层各部分子元素个数组成;评语等级集合为: V={v 1,v 2,v 3,v 4}={优秀,良好,中等,差}。 3.根据权利要求1所述的一种基于非线性FCE的INS/USBL组合导航系统性能评估方法,其特征在于,所述计算基于隶属度函数的评判矩阵,包括: 利用梯度模糊数作为系统性能评估隶属函数,求取评判矩阵A i , 梯度模糊数隶属函数:其中,a i 中i的取值为1,2,3,b j 中j的取值为1,2,3,4,分别表示待评估INS/USBL组合导航系统器件层指标精度值。 4.根据权利要求1所述的一种基于非线性FCE的INS/USBL组合导航系统性能评估方法,其特征在于,所述计算组合导航系统权值向量C,包括:器件层组合权值向量 指标层权值向量C i+1由AHP计算得到;其中,表示利用熵技术法计算得到器件层权值向量, 权 利 要 求 书1/2页2CN 109934484 A
非线性控制系统样本
第2篇先进控制控制系统 第8章非线性控制系统 前面的章节所讨论的都是线性系统, 可是实际上, 大多数物理过程都具有一定程度的非线性。即使如此, 如果系统的非线性程度不高, 或者仅存在于较窄的操作范围内, 可将其近似为一个线性系统来进行处理, 则前面所讨论的控制技术, 例如常规PID控制仍旧是有效的。可是对于一些具有不可忽视的非线性的过程, 这种方法就不适用了。这种情况下, 采用非线性控制策略能进一步提高控制品质。 随着控制理论的进展, 自动化技术工具的发展, 特别是计算机的使用, 使非线性控制系统在工业控制中逐步多了起来。如果对非线性控制系统粗略地进行分类, 能够分为两类: 一类过程是线性的(或近似按线性处理), 为了满足控制系统的某种要求或改进控制系统质量而引入非线性的控制规律; 另一类过程本身是非线性的, 引入非线性的补偿元件或控制规律, 以达到系统规定的控制指标。 8.1 线性过程的非线性控制 8.1.1 液位的非线性控制 (1)均匀控制的实现 在均匀控制系统一节中, 曾提到能够采用非线性控制规律来实现均匀控制, 其中最常见的是采用带不灵敏区的非线性控制。这种带不灵敏区的非线性控制规律如图8-1所示。当系统偏差e在不灵敏区内, 控制器的增益很小, 即δ很大; 偏 差e超出不灵敏区后, 控制器增益将增大( 利用非线性控制规律实现均匀控制的原理较简单, 只要根据工艺允许的液位波动范围, 合理设置不灵敏 区宽度, 就能做到在较小的外扰作用下, 使液位偏差 信号在不灵敏区内变化, 非线性控制器工作在小增益 区域, 从而输出变化不大, 控制阀的开度变化也不大, 图8—1 非线性控制器流量仅仅在小范围内波动。也就是说, 液位在允许范 围内波动的同时, 流量不至于有较大的变化, 达到液
非线性系统学习总结
非线性控制系统学习感悟对于非线性控制系统的学习我们应该对其基本特性及应用思想进行了解。非线性系统的数学模型不满足叠加原理或其中包含非线性环节。包括非本质非线性(能够用小偏差线性化方法进行线性化处理的非线性)和本质非线性(用小偏差线性化方法不能解决的非线性)。它与线性系统有以下主要区别: 1.线性控制系统只能有一个平衡点或无穷多的平衡点。但非线性系统可以有一个、二个、多个、以至无穷多个平衡点。非线性系统与线性定常系统明显不同,其稳定性是针对各个平衡点而言的。通常不能说系统的稳定性如何,而应说那个平衡点是稳定的或不稳定的。 2. 在线性系统中,系统的稳定性只与系统的结构和参数有关,而与外作用及初始条件无关。非线性系统的稳定性除了与系统的结构和参数有关外,还与外作用及初始条件有关。由于非线性控制系统与线性控制系统有很大的差异,因此,不能直接用线性理论去分析它,否则会导致错误的结论。对非线性控制系统的分析,还没有一种象线性控制系统那么普遍的分析、设计方法。 除了以上的主要特点外,也具有以下特性,在非线性系统中,除了从平衡状态发散或收敛于平衡状态两种运动形式外,往往即使无外作用存在,系统也可能产生具有一定振幅和频率的稳定的等幅震荡。输入为正弦函数时,其输出的稳态分量也是同频率的正弦函数,输入和稳态输出之间仅在振幅和相位上有所不同,因此可以用频率响应来描述系统的固有特性。而非线性系统输出的稳态分量在一般情况下并
不具有与输入相同的函数形式。 非线性系统采用非线性微分方程描述,至今尚没有统一的求解方法,其理论也还不完善。为了更好的描述分析非线性系统,我们根据非线性系统的特点,总结了非线性系统工程上常采用的方法有:1.线性化近似法 对于某些非线性特性不严重的系统,或系统仅仅只研究平衡点附近特性时,可以用小偏差线性化方法,将非线性系统近似线性化。2.分段线性近似法 将非线性系统近似为几个线性区域,每个区域有对应的线性化微分方程描述。 3.相平面法 相平面法是非线性系统的图解分析法,采用在相平面上绘制相轨迹曲线,确定非线性系统在不同初始条件下系统的运动形式。该方法只适用最高为二阶的系统。 4.描述函数法 描述函数法是线性系统频率特性法的推广,采用谐波线性化将非线性特性近似表示为复变增益环节,应用频率法分析非线性系统的稳定性和自持振荡。该方法适用于非线性系统中线性部分具有良好的低通滤波特性的系统。 通过对描述函数学习我们可以知道描述函数的应用条件: ①非线性系统的结构图可以简化为只有一个非线性环节N和一个线性环节)(s G串联的闭环结构。 ②非线性特性的静态输入输出关系是奇对称的,即) y- - =,以保 x ( ) (x y 证非线性环节在正弦信号作用下的输出中不包含直流分量。
非线性振动
非线性振动 期 末 作 业 任课老师: 姓名: 学号: 专业: 课程:非线性振动
非线性振动的理论研究方法 非线性振动是指恢复力与位移不成正比或阻尼力不与速度一次方成正比的系统的振动。尽管线性振动理论早已相当完善,在工程上也已取得广泛和卓有成效的应用,但在实际问题中,总有一些用线性理论无法解释的现象。一般说,线性模型只适用于小运动范围,超出这一范围,按线性问题处理就不仅在量上会引起较大误差,而且有时还会出现质上的差异,这就促使人们研究非线性振动。 通过理论分析对非线性振动进行研究是目前最有效最基本最直接的方式。理论研究分析最主要的任务是通过理论的研究分析来揭示各类非线性系统振动的基本理论和主要特点。非线性振动理论研究分析的最重要的数学工具就是微分方程。学者们在微分方程发展过程中发现用初等函数表达方程解的可能性极为有限之后,出现了三个比较重要的方向。其一是引入新的函数作为解的表达,并研究这些函数的性质和数值解。非线性振动中有个别的问题就可以用这种方法来求解方程,例如摆的大幅振动解用椭圆函数表达。然而这方面的例子是极为有限的。这就说明只有极少数非线性微分方程能够求出方程的解,所以通常必须用近似的求解方法求出非线性微分方程的近似解,这就需要用到求解非线性微分方程的两个最基本的方法,这就是定性方法和定量方法。定性理论不通过解的表达式来研究分析解的性质,比如利用几何法作出微分方程所定义的积分曲线,运用稳定性理论引入另外的函数中,通过它们去研究解的性质。把常微分方程定性理论与非线性振动联系起来主要应归功于前苏联的Andronov等建立起来的学派。这些学者们把定性理论用来解决电学和力学中出现的大量非线性振动问题。定性理论在发展的过程中,一方面在理论上形成了许多讨论奇点、周期解、极限环的定理、判据等,一方面形成了一些实用的作图方法,例如等倾线法、Lienard法、点映射等。 求解非线性微分方程近似解的方法中定量分析的方法包括数值解法以及解析法。定量分析方法中的解析法是最基本的分析研究方法,使用解析法来进行研究分析最主要的任务是通过理论的研究分析来揭示各类非线性系统振动的基本理论和主要特点。使用解析方法法求解非线性微分方程近似解的方法有:频闪法、平均法、小参数法、多尺度法、渐近法、谐波平衡法等研究分析方法。下面简单叙述一下几种分析非线性振动的方法:
利用状态空间法对一类非线性振动系统的数值方法研究_王建平
利用状态空间法对一类非线性振动系统的 数值方法研究 王建平1,2 刘宏昭2 原大宁2 苏志霄3 (1同济大学机械学院 上海,200092)(2西安理工大学机仪学院 西安,710048) (3国电电力建设研究所 北京,100055) 摘 要 提出了一类非线性振动系统的隐式解,导出了相应的数值计算方法,并对该数值方法的收敛性、误差和稳定性进行了研究。与传统的非线性振动系统的数值求解方法如:Ho ubo lt法、Wilson-θ法、New mar k-β法以及考虑高阶余项的连续线性化模型及其T ay lo r变换法相比,该方法具有更高的求解精度和效率。将该数值方法应用到结晶器四偏心式振动机构这样复杂的弹性机构非线性振动系统的研究中,取得了良好的效果,说明该方法具有一定的工程实用价值。 关键词:非线性振动;数值方法;隐式解;状态空间法 中图分类号:T H113.5;O322 目前,对于线性振动系统的理论研究已经发展得相当完善,但是对于非线性振动系统,特别是强非线性系统和非线性高阶系统,解的形式究竟有几种,至今还没有完全搞清楚[1]。然而对于部分弱非线性振动系统,目前已经发展了多种有效的近似解法,如Lindstedt-Poincaré(L-P)法、平均法、多尺度法、KBM法(三级数法)、谐波平衡法等[2]。对于一般的强非线性系统,近年来国内外学者在这一方面也开展了一系列理论研究工作,取得了不少成果。如S E Jones用参数变换法研究了大参数Duffing方程的自由振动问题[3];T D Burto n等提出了一种改进的多尺度法,分析了大参数强非线性系统的自由振动和强迫振动[4];S Brav o Yuste提出一种带有Jaco bi 椭圆函数的谐波平衡法[5]。但是无论是弱非线性问题,还是强非线性问题,所有的近似解法都有各自的特点,都是针对某一类特定的振动问题提出的近似解法。由于求解非线性方程本身的复杂性,目前还没有一种适应各种不同类型方程的通用解析法,仅有极少数非线性振动方程可以求得其精确解[1]。 因此,对于非线性系统的研究通常是首先利用数值计算方法得到系统的数值解,再采用点映射、胞映射等方法进行全局分析[6]。目前常用的数值方法有Houbo lt法、Wilso n-θ法和New mark-β法等,这些方法首先是将非线性微分方程化为对每一时间步长Δt内的线性方程(或称为线性化方程),然后按中心差分法等递推算法及各种修正形式计算非线性方程的数值解[2]。由于基于系统线性化的各种算法本身存在着一定的模型误差,即忽略线性化后高阶余项带来的误差,而中心差分法等各种算法及其修正形式只能提高线性化方程的计算精度,不能从根本上改进或修正这类模型误差[6]。另外,针对局部非线性动力系统的分块Ho ubolt法、分块Wilso n-θ和分块New mark-U法及其周期解方法也存在着同样的问题[8,9]。本文从非线性振动系统的物理空间出发,导出了一类非线性振动系统改进的状态空间模型,基于此模型提出了该类非线性振动系统的隐式解析解,给出了相应的数值计算格式,并对数值计算方法的收敛性、误差和稳定性进行了分析。与现有的非线性振动系统数值计算方法如:Houbo lt法、Wilson-θ法和New mark-U法相比,本文提出的数值计算方法具有更高的计算精度和效率。 1 非线性振动方程状态空间模型 对于自然界广泛存在的非线性振动问题,可以用下面的二阶非线性方程进行描述 第17卷第2期2004年6月 振 动 工 程 学 报 Jo urnal o f Vibra tion Engineering V ol.17No.2 Jun.2004 国家自然科学基金资助项目(编号:50075068)、陕西省教育厅科研基金资助项目(编号:O O JK181)、中国博士后基金资助项目(编号:200303321) 收稿日期:2002-06-24;修改稿收到日期:2003-11-27 DOI:10.16385/https://www.360docs.net/doc/c214367947.html, k i.i ssn.1004-4523.2004.02.023
三自由度齿轮传动系统的非线性振动分析
收稿日期:20030710 基金项目:航空科学基金项目(02C53019)资助 作者简介:刘晓宁(1976-),男(汉),山东, 博士研究生 刘晓宁 文章编号:100328728(2004)1021191203 三自由度齿轮传动系统的非线性振动分析 刘晓宁,王三民,沈允文 (西北工业大学,西安 710072) 摘 要:在建立三自由度齿轮间隙非线性动力学模型的基础上,利用增量谐波平衡法获得了受到参数激励和外部谐波激励的三自由度齿轮传动系统模型的周期响应,包括稳定和不稳定的周期轨道,并利用Floquet 理论研究其稳定性、分岔类型,对系统的参数变化进行分析,研究了系统通向混沌的倍周期分岔道路和拟周期分岔道路,绘制了系统周期解分岔图。关 键 词:齿轮转子轴承传动系统;增量谐波平衡法;Floquet 理论中图分类号:TH13 文献标识码:A N onlinear Vibrations of 32DOF G eared R otor 2B earing System LI U X iao 2ning ,W ANG San 2min ,SHE N Y un 2wen (N orthwestern P olytechnical University ,X i ′an 710072) Abstract :The incremental harm onic balance (IH B )method is used to obtain periodic m otions of a 32DOF non 2linear m odel of a geared rotor system subjected to parametric and external harm onic excitations.The stability of the periodic m otions is investigated by the Floquet theory ,the bifurcation behavior is traced.Parametric studies are performed to understand the effect of system parameters such as excitation frequency on the nonlinear dy 2namic behaviors. K ey w ords :G eared rotor bearing system ;Incremental harm onic balance (IH B )method ;Floquet theory 齿轮传动是应用最为广泛的一种机械传动形式。在齿轮传动系统中,由于齿侧间隙、支承间隙、时变刚度等因素的存在,导致系统产生强非线性振动,这种振动往往表现为系统的分叉、混沌振动现象,会对机械传动系统的工作性能和可靠性产生很大影响。因此,齿轮传动非线性系统的非线性振动研究引起了广泛的关注[2~5]。 从齿轮传动系统间隙非线性动力学研究来说,大部分的研究都是借助数值方法探讨系统分叉、混沌等现象的存在。增量谐波平衡法(IH B )作为求解非线性微分方程周期解的解析方法,具有精度高,适用于求解周期激励问题的特点,尤为重要的是能够求解出混沌吸引子内部的不稳定周期轨道,这也恰恰是实现混沌控制的目标稳定轨道。 本文综合利用增量谐波平衡法和数值方法研究三自由度齿轮传动系统的动态特性,考察系统参数对动态性能的影响,并结合应用Floquet 理论探讨了通向混沌的倍周期和拟周期分叉道路。 1 三自由度齿轮转子轴承系统的间隙非线性模型及方程 图1 三自由度非线性齿轮传动系统模型 如图1所示的三自由度非线性齿轮传动系统模型,齿轮部分包括齿轮惯量I g 1和I g 2,齿轮质量m g 1和m g 2,基圆直径d g 1和d g 2。齿轮啮合由非线性位移函数f h 和时变刚度 k h (t - ),线性粘性阻尼c h 描述。轴承和支撑轴的模型则由 等效的阻尼元件和非线性刚度元件表述。阻尼元件具有线 第23卷 第10期 机械科学与技术 V ol.23 N o.10 2004年 10月 MECH ANIC A L SCIE NCE AND TECH NO LOGY October 2004
!!故障转子系统的非线性振动分析与诊断方法附录A matlab程序
A.1 传递距阵法分析程序 %main_critical.m %该程序使用Riccati传递距阵法计算转子系统的临界转速及振型 %本函数中均采用国际单位制 % 第一步:设置初始条件(调用函数shaft_parameters) %初始值设置包括:轴段数N,搜索次数M %输入轴段参数:内径d,外径D,轴段长度l,支撑刚度K,单元质量mm,极转动惯量Jpp[N,M,d,D,l,K,mm,Jpp]=shaft_parameters; % 第二步:计算单元的5个特征值(调用函数shaft_pra_cal) %单元的5个特征值: %m_k::质量 %Jp_k:极转动惯量 %Jd_k:直径转动惯量 %EI:弹性模量与截面对中性轴的惯性矩的乘积 %rr:剪切影响系数 [m_k,Jp_k,EI,rr]=shaft_pra_cal(N,D,d,l,Jpp,mm); % 第三步:计算剩余量(调用函数surplus_calculate),并绘制剩余量图 %剩余量:D1 for i=1:1:M ptx(i)=0; pty(i)=0; end for ii=1:1:M wi=ii/1*2+50; [D1,SS,Sn]=surplus_calculate(N,wi,K,m_k,Jp_k,JD_k,l,EI,rr); D1; pty(ii)=D1; ptx(ii)=w1 end ylabel(‘剩余量’); plot(ptx,pty) xlabel(‘角速度red/s’); grid on % 第四步:用二分法求固有频率及振型图 %固有频率:Critical_speed wi=50; for i=1:1:4 order=i [D1,SS,Sn]=surplus_calculate(N,wi,k,m_k,Jp_k,Jd_k,l,EI,rr); Step=1; D2=D1; kkk=1; while kkk<5000