中科大地图导航(实验报告)

中科大地图导航一,科大西区地图的构建与表示:
(1)、物理地图的抽象表达
地图选择:科大西区地图
节点数:12
边数:15
地点信息:地点名,时间,简介,街道名,街道长度(权值)
注释:该图为对科大地图抽象的结果。
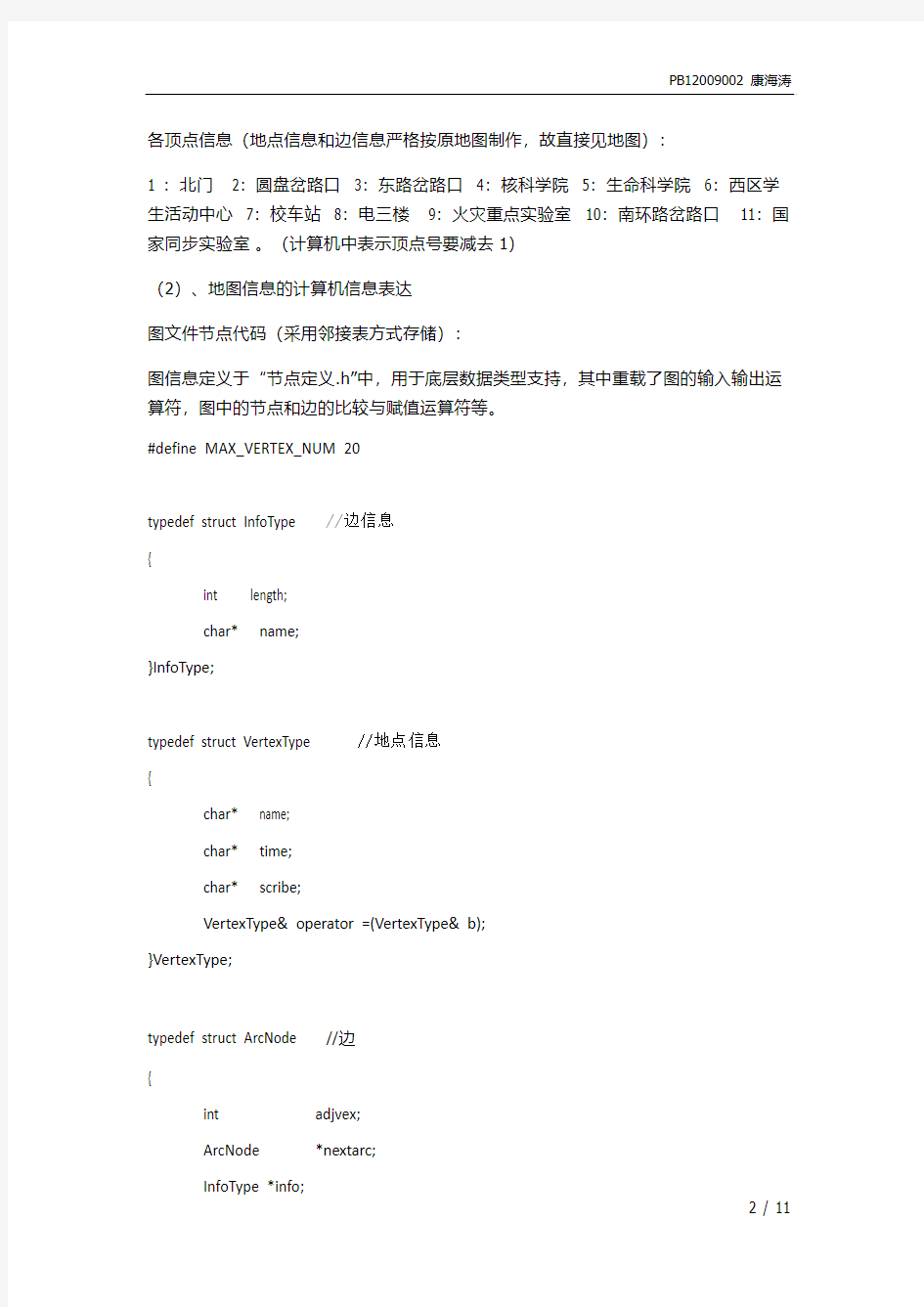
各顶点信息(地点信息和边信息严格按原地图制作,故直接见地图):
1 :北门 2:圆盘岔路口 3:东路岔路口 4:核科学院 5:生命科学院 6:西区学生活动中心 7:校车站 8:电三楼 9:火灾重点实验室 10:南环路岔路口 11:国家同步实验室。(计算机中表示顶点号要减去1)
(2)、地图信息的计算机信息表达
图文件节点代码(采用邻接表方式存储):
图信息定义于“节点定义.h”中,用于底层数据类型支持,其中重载了图的输入输出运算符,图中的节点和边的比较与赋值运算符等。
#define MAX_VERTEX_NUM 20
typedef struct InfoType //边信息
{
int length;
char* name;
}InfoType;
typedef struct VertexType //地点信息
{
char* name;
char* time;
char* scribe;
VertexType& operator =(VertexType& b);
}VertexType;
typedef struct ArcNode //边
{
int adjvex;
ArcNode *nextarc;
InfoType *info;
ArcNode& operator =(ArcNode& b);
}ArcNode;
typedef struct VNode //图的邻接表
{
VertexType* data;
ArcNode *firstarc;
VNode& operator=(VNode& a);
}VNode,AdjList[MAX_VERTEX_NUM];
科大地图的初始化(宏处理方式):
科大地图的初始化在“中科大地图.h”中完成,其中定义了ustc的namespace,在该namespace里有四个全区变量:
VertexType VexInfo[11]; //节点信息矩阵
VNode node[MAX_VERTEX_NUM]; //科大地图的邻接表
int Ustcvexnum=0; //邻接表的顶点数
int Ustcarcnum=0 ; //邻接表的边数
有四个全局函数:
void InititaVex(); //初始化顶点信息
void InititaNode(); //初始化中科大地图邻接表
int Findword(char *p); //根据顶点名找到相应的顶点号
char* Findchar(char i); //根据顶点号找到相应的顶点名
开始时,采用了很原始的复制粘贴的方式处理重复的数据,可是像这样有一定规模的数据,采用这样低级的方式处理,查询与修改时带来了很多的麻烦,于是设计了四个宏将处理简单化。
①DECLEARE_ VEREXTYPE 宏:
使用于InititaVex()函数中,定义如下:
#define DECLEARE_VEREXTYPE(dname,dtime,dscribe) \
i = Findword(dname); \
VexInfo[i].name =dname; \
VexInfo[i].scribe =dtime;\
VexInfo[i].time =dscribe;
于是有InititaVex()函数定义如下:
Void InititaVex()
{
int i;
DECLEARE_VEREXTYPE(“北门”,”无“,”无“)
DECLEARE_VEREXTYPE("圆盘岔路口",”无“,”无“)
DECLEARE_VEREXTYPE("东路岔路口",”无“,”无“)
…
}
②BEGIN_ARCMAP,ADD_ARCMAP,END_ARCMAP三宏:
这三宏使用于InititaNode()中,使用模式如下:
BEGIN_ARCMAP(…,…,…,..)
ADD_ARCMAP(…,…,…)
END_ARCMAP()
其定义如下:
#define BEGIN_ARCMAP(sname,dname,aname,alength)\
i = Findword(sname);\
node[i].data = &VexInfo[i];\
PArcpresent = (ArcNode *) malloc(sizeof(ArcNode));\
PArcpresent ->adjvex = Findword(dname);\
PArcpresent ->nextarc = NULL;\
PInfoType = (InfoType*)malloc(sizeof(InfoType));\
PArcpresent ->info = PInfoType;\
PArcpresent ->info->length =a length;\
PArcpresent ->info->name =aname;\
node[i].firstarc = PArcpresent;\
PArclast = PArcpresent;\
Ustcarcnum++;
PB12009002 康海涛
#define ADD_ARCMAP(dname,aname,alength)\
PArcpresent = (ArcNode *) malloc(sizeof(ArcNode));\
PArcpresent ->adjvex = Findword(dname);\
PArcpresent ->nextarc = NULL;\
PInfoType = (InfoType*)malloc(sizeof(InfoType));\
PArcpresent ->info = PInfoType;\
PArcpresent ->info->length = alength;\
PArcpresent ->info->name =aname;\
PArclast->nextarc = PArcpresent;\
PArclast = PArcpresent;\
Ustcarcnum++;
#define END_ARCMAP()\
Ustcvexnum++;\
i = -1;
由以上三宏,InititaVex()函数定义如下:
void InititaNode()
{
InititaVex();
int i;
ArcNode *PArcpresent,*PArclast;
InfoType *PInfoType;
BEGIN_ARCMAP(“北门”,”圆盘岔路口”,”济慈路”,10)
END_ARCMAP()
BEGIN_ARCMAP(”圆盘岔路口”,”北门”,”济慈路”,10)
ADD_ARCMAP(“东路岔路口”,”东路”,21)
…….
END_ARCMAP()
…..
}
于是在主函数里调用ustc:: InititaVex()函数即可完成对中科大地图的初始化。
二,图的算法支持:
图的各种算法支持定义在CGraph类中,CGraph类声明文件如下:
#include "节点定义.h"
#define VERTEX_NUM 10
class CGragh
{
private:
AdjList vertices;
int vexnum,arcnum;
int Minlength[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; //两顶点之间的最短距离数组
char* Enumtrace[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; //记录任意两点之间最短的路径
public:
CGragh();
CGragh(AdjList& a,int vex,int arc);
virtual ~CGragh();
protected:
void PrintArc(int i,int j); //找到并打印直接相连的i,j顶点之间的路径。
int FindMin(int a,int i,int& m); //Dijkstra算法使用函数
void Dijkstra(int i);
void Dijkstrall();
public:
int MinlengthPrint(int i,int j); //返回顶点i与j之间的最短距离,并打印其路径。
void PrintNode(int i); //打印顶点i的信息
void TSPnum(int n); //选择图中n个顶点,进行TSP求解
};
各种函数的说明均在其中,该类按如下过程完成对多种功能的支持:
(1)构造函数读入过程:
构造函数,完成读入过程,较为简单,代码如下:
CGragh::CGragh(AdjList& a,int vex,int arc)
{
int i,j;
for(i=0;i { vertices[i] = a[i]; } arcnum = arc; vexnum = vex; for(i=0;i for(j=0;j { Minlength[i][j] = -1; Enumtrace[i][j] = NULL; } Dijkstrall(); } (2)Dijkstrall算法记录过程: Dijkstra算法是图算法的核心,以后所有的各种操作均是以算法完成后的记录的数组为基础的,为这个算法支持类的核心,故详细列出讲解: Dijkstrall()函数: void CGragh::Dijkstrall() { int i; for(i =0 ;i Dijkstra(i); //调用Dijkstra(int i)函数对各顶点进行运算 } Dijkstra(int i)函数(函数写得匆忙,故变量命名没有太注意): void CGragh::Dijkstra(int i) { int k,j,minx,g=0; //临时保存顶点的变量 int temp,temp1,min; //临时保存路径长度的变量 char a[10],b[2]; //临时保存各路径字符串,如”012”,就是从0号顶点到1号再到2号顶点。 char *p; //用于生成最终要保存的路径字符串空间,更改其值。 //遍历生成i号顶点与其他顶点之间的最短距离,与最短路径字符串 for(j = 1;j < vexnum;j++) { p = (char*) malloc(10 * sizeof(char)); //先在i顶点里找出其能直接到达,且记录数组未记录的最近顶点 //FindMin函数找出a顶点能直接到达,且Minlength[i]没有记录 //的最近顶点,返回该顶点号(如果都已记录则返回-1),长度记录在 //min里,稍后给出源码。 if( (minx = FindMin(i,i,min)) == -1) { min = MAXINT; //如周边都已记录,初始化min为MAXINT。 } else { *p = (char) i + 0x30; *(p+1) = (char) minx + 0x30; *(p+2) = '\0'; } for(k=0;k < vexnum;k++) //接下来,分析已记录的顶点 { if(k == i) continue; if(Minlength[i][k] != -1) { temp = Minlength[i][k]; //长度加上已记录的顶点 strcpy(a,Enumtrace[i][k]); //路径加上已记录路径 //找到该顶点里能直接到达,未记录且最近的顶点 if( (g = FindMin(k,i,temp1)) == -1) continue; b[0] = (char) g + 0x30; b[1] = '\0'; strcat(a,b); temp += temp1; if(temp < min) //循环判断找到当前最近的顶点 { min = temp; minx = g; strcpy(p,a); } } } //记录入数组 Minlength[i][minx] = min; Enumtrace[i][minx] = p; } } 当前的Dijkstra算法是我直接根据Dijkstra算法的文字描述所写的,算法上有很多的重复计算,造成较高的运算时间,还有很多需要改进的地方。 FindMin函数,该函数在上面已作说明,较为简单: int CGragh::FindMin(int a,int i,int &m) { int temp = MAXINT,min = MAXINT; ArcNode *PN1 = vertices[a].firstarc; while(PN1) { if(Minlength[i][PN1->adjvex] == -1 && PN1->info->length < temp && PN1->adjvex != i) { min = PN1->adjvex; temp = PN1->info->length; } PN1 = PN1->nextarc; } if(min == MAXINT) return -1; else { m = temp; return min; } } (3)各种外部接口,完成相应功能: int MinlengthPrint(int i,int j); //返回顶点i与j之间的最短距离,并打印其路径。 void PrintNode(int i); //打印顶点i的信息 void TSPnum(int n); //选择图中n个顶点,进行TSP求解 这三个功能函数都只需要直接调用(2)过程完成后记录数组即可,故源码不列 出,具体实现见附件,在此只做简单说明,PrintNode函数输出操作在 ArcNode定义里就已经重载,MinlengthPrint函数直接调用记录数组并输出即可。 TSPnum函数,由于时间原因,我是直接通过将选择顶点号全排列,通过最短长度数组找到其中最短的方式,但是通过贪心加动态规划算法可以将时间复杂度从O(N!)降至O(2^n),可以大大改进时间复杂度。 《大学化学基础实验2》实验报告 课程:物理化学实验 专业:环境科学 班级: 学号: 学生姓名:邓丁 指导教师:谭蕾 实验日期:5月24日 实验一、溶解焓的测定 一、实验名称:溶解焓的测定。 二、目的要求:(1)学会用量热法测定盐类的积分溶解焓。 (2)掌握作图外推法求真实温差的方法。 三、基本原理: 盐类的溶解通常包含两个同时进行的过程:一是晶格的破坏,为吸热过程;二是离子的溶剂化,即离子的水合作用,为放热过程。溶解焓则是这两个过程热效应的总和,因此,盐类的溶解过程最终是吸热还是放热,是由这两个热效应的相应大小所决定的。影响溶解焓的主要因素有温度、压力、溶质的性质以及用量等。热平衡式: △sol H m=-[(m1C1+m2C2)+C]△TM/m2 式中, sol H m 为盐在溶液温度及浓度下的积分溶解焓, J·mol , m1 , m2 分别为水和溶质的质量, M 为溶质的摩尔质量,kg·mol -1 ;C1 ,C 2 分别为溶剂水, kg; 溶质的比热容,J·kg -1;T 为溶解过程中的真实温差,K;C 为量热计的热容, J·K- 1 ,也称热量计常数.本实验通过测定已知积分溶解焓的标准物质 KCl 的 T ,标定出量热计热容 C 的值. 四、实验主要仪器名称: NDRH-2S型溶解焓测定实验装置1套(包括数字式温度温差测量仪1台、300mL简单量热计1只、电磁搅拌器1台);250mL容量瓶1个;秒表1快;电子 ;蒸馏水 天平1台;KCl;KNO 3 五、实验步骤: (1)量热计热容 C 的测定 ( 1 ) 将仪器打开 , 预热 . 准确称量 5.147g 研磨好的 KCl , 待用 . n KCl : n水 = 1: 200 (2)在干净并干燥的量热计中准确放入 250mL 温室下的蒸馏水,然后将温度传感器的探头插入量热计的液体中.打开搅拌器开关,保持一定的搅拌速度,待温差变化基本稳定后,读取水的温度 T1 ,作为基温. (3)同时, 每隔30s就记录一次温差值,连续记录8 次后, 将称量好的 5.174g KCl 经漏斗全部迅速倒入量热计中,盖好.10s记录一次温度值,至温度基本稳定不变,再每隔 30s记录一次温度的数值,记录 8 次即可停止. (4)测出量热计中溶液的温度,记作 T2 .计算 T1 , T2 平均值,作为体系的温度.倒出溶液,取出搅拌子,用蒸馏水洗净量热计. KNO3 熔解热的测定:标准称量 3.513g KNO3 ,代替 KCl 重复上述操作. 便携式导航仪地图升级 图文教程 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT 便携式导航仪地图升级图文教程 (一)升级流程图 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为 PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮 或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号; 注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版 6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、 E800TV版 7寸: E700S、E700精装版、E700 普清版本:(适用于寸普清屏) 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6 3、备份原导航中的地图文件并删除整个地图文件夹; 用数据线连接电脑后,打开导航盘符,把对应的地图文件夹拷到电脑中进行备份,以避免升级失败时还原旧地图用; 步骤: A)、用数据线与电脑相连后,打开我的电脑,找到新出现的盘符 导航电子地图制作专业标准 专业子项考核指标考核内容考核标准 甲级 导航电子地图制作人员规模测绘及相关专业技术人员100人(含注册测绘师5人),其中高级10人、中级20人 仪器设备 外业数据采集设备50台(定位精度≤10m) 导航地图编辑系统 具备以下功能: 1.对道路和交通信息、POI、背景、注记的空间信息和属性信息的编辑制作; 2.支持数据更新机制的导航地图数据库管理; 3.通用交换格式数据输出。 在线存储设备60TB(有效存储容量) 保密管理保密制度 保密管理条件经国家测绘地理信息局考核合格,符合以下要求: 1.保密机构健全,人员、职责明确落实; 2.保密制度完善,使所属人员知悉与其工作有关的保密范围和各项保密制度; 3.保密要害部门制定严格的保密防范措施,并组织实施。配备必要的保密设备和设施; 4.涉密设备和网络必须与互联网物理隔离; 5.经常进行测绘保密检查,发现问题及时解决; 6.在数据制作区域,禁止使用无线网络,并能够自动识别外来设备入网;生产办公设备禁止 在互联网上使用,作业用计算机的USB端口、串口、并口必须封闭; 7.数据生产环节中的数据必须使用经加密处理的自有格式。 作业标准 导航电子地图数据模型和规格数据模型和规格应当符合《车载导航电子地图产品规范》GB/T 20267-2006的基本要求。 作业规范包括内外业的作业组织、人员配备、环境配置、操作规范。 产品编译规范规定场所设置、人员限制、保密措施、环境和流程。 质量检查规范执行《导航电子地图检测规范》CH/T 1019-2010的规定。 数据生产工艺流程说明 规定外业采集、内业编辑制作、数据编译、质量检查各作业环节的内部流程工艺和作业环节 之间的流程。 1 / 1 华南师范大学实验报告 一、实验目的 1、明确燃烧热的定义,了解定压燃烧热与定容燃烧热的差别。 2、掌握量热技术的基本原理;学会测定萘的燃烧热 3、了解氧弹量热计的主要组成及作用,掌握氧弹量热计的操作技术。 4、学会雷诺图解法校正温度改变值。 二、 实验原理 通常测定物质的燃烧热,是用氧弹量热计,测量的基本原理是能量守恒定律。一定量被测物质样品在氧弹中完全燃烧时,所释放的热量使氧弹本身及其周围的介质和量热计有关附件的温度升高,测量介质在燃烧前后温度的变化值T ?,就能计算出该样品的燃烧热。 ()p V Q Q RT n g =+? (1) ()V W W Q Q C W C M +=+样品21总铁丝铁丝水水(T -T ) (2) 用已知燃烧热的物质(本实验用苯甲酸)放在量热计中燃烧,测其始末温度,求出T ?。 便可据上式求出K ,再用求得的K 值作为已知数求出待测物(萘)的燃烧热。 三、仪器和试剂 1.仪器 SHR-15氧弹量热计1台;贝克曼温度计;压片机 2台;充氧器1台;氧气钢瓶1个;1/10℃温度计;万能电表一个;天平 2.试剂 铁丝;苯甲酸(AR);萘(AR );氧气 四、实验步骤 1、测定氧氮卡计和水的总热容量 (1)样品压片:压片前先检查压片用钢模,若发现钢模有铁锈油污或尘土等,必须擦净后,才能进行压片,用天平称取约0.8g 苯甲酸,再用分析天平准确称取一根铁丝质量,从模具的上面倒入己称好的苯甲酸样品,徐徐旋紧 压片机的螺杆,直到将样品压成片状为止。抽出模底的托板,再继续向下压,使模底和样品一起脱落,然后在分析天平上准确称重。 分别准确称量记录好数据,即可供燃烧热测定用。 (2)装置氧弹、充氧气:拧开氧弹盖,将氧弹内壁擦净,特别是电极下端的不锈钢接线柱更应擦十净,将点火丝的两端分别绑紧在氧弹中的两根电极上,选紧氧弹盖,用万用表欧姆档检查两电极是否通路,使用高压钢瓶时必须严格遵守操作规则。将氧弹放在充氧仪台架上,拉动板乎充入氧气。 (3)燃烧温度的测定:将充好氧气后,再用万用表检查两电极间是否通路,若通路将氧弹放入量热计内简。用量筒称3L 自来水,倒入水桶内,装好搅拌轴,盖好盖子,将贝克曼温度计探头插入水中,此时用普通温度计读出水外筒水温和水桶内的水温。接好电极,盖上盖了,打开搅拌开关。待温度温度稳定上升后,每个半分钟读取贝克曼温度计一次,连续记 导航软件升级步骤指引 本文力求为导航软件初学者讲述一个完整通用的升级步骤,所以看起来篇幅比较大,且繁杂。其中涉及的内容,并不是每次都会用到,所以读者不必一次全部看完,在实践中学习是最好的学习方法。下面步骤看起来很多,但其实非常简单,我只是讲的比较细罢了,初学者千万不要因为篇幅原因就吓退了,呵呵。 首先声明:本文所说的导航仪主要针对基于内核为Windows CE(以下简称WINCE)系统的导航仪。目前国内市场上的导航产品可以说95%以上(包括车载机)都是基于WINCE系统的,所以对于大多数用户来说,是不是这个系统的基本上不用去检测。例如,纽曼、朗视通、万利达、新科、城际通、E路航等等等等,包括山寨或一些小品牌,尽管操作界面不同,但是内核都是基于WINCE系统的。当然也有例外,Garmin(中文名叫任我游)这个品牌的导航仪内核和软件是其自主开发的,不属于WINCE系统,所以该导航仪用户就不必看下面文章了。(下文中可能会用到的工具软件都会在文章最后给出下载链接) 第一步:找到适合自己导航仪的导航软件。 怎样知道某款导航软件是不是适合自己的导航仪呢?主要做到两个匹配。 1、屏幕分辨率匹配。(这点非常重要) 分辨率匹配是最重要的,例如您的导航仪分辨率是480×234的,就不能使用480×272或800×480版本的导航软件。如果错误使用了分辨率不匹配的导航软件,就会出现花屏、溢屏、不能全屏、黑屏,按钮错位,甚至根本不能启动、启动出错或死机现象。 如何知道自己导航仪的分辨率呢?三种方法,很简单: <1>看说明书。一般说明的产品规格中都会写明。 <2>向经销商或厂家询问。 <3>使用软件测试。Resinfo和navi examine都是不错的测试软件,这两款软件的下载和介绍,文章最后会集中给出。 信号与系统实验报告 一、实验目的 1. 熟悉连续时间系统的单位冲激响应、阶跃响应的意义及求解方法 2. 熟悉连续(离散)时间系统在任意信号激励下响应的求解方法 3. 熟悉应用MATLAB实现求解系统响应的方法 二、实验原理 1.连续时间系统求解各种响应 impulse( ) 函数 函数impulse( )将绘制出由向量a和b所表示的连续系统在指定时间范围内的单位冲激响应h(t)的时域波形图,并能求出指定时间范围内冲激响应的数值解。 以默认方式绘出由向量a和b所定义的连续系统的冲激响应的时域波形。 绘出由向量a和b所定义的连续系统在0 ~ t0时间范围内冲激响应的时域波形。 绘出由向量a和b所定义的连续系统在t1 ~ t2时间范围内,并且以时间间隔p均匀取样的冲激响应的时域波形。 只求出由向量a和b所定义的连续系统在t1 ~ t2时间范围内,并且以时间间隔p均匀取样的冲激响应的数值解,但不绘出其相应波形。 step( ) 函数 函数step( )将绘制出由向量a和b所表示的连续系统的阶跃响应,在指定的时间范围内的波形图,并且求出数值解。和impulse( )函数一样,step( )也有如下四种调用格式: step( b,a) step(b,a,t0) step(b,a,t1:p:t2) y=step(b,a,t1:p:t2) 上述调用格式的功能和impulse( )函数完全相同,所不同只是所绘制(求解)的是系统的阶跃响应g(t),而不是冲激响应h(t)。 lsim( )函数 根据系统有无初始状态,lsim( )函数有如下两种调用格式: ①系统无初态时,调用lsim( )函数可求出系统的零状态响应,其格式如下: 《物理化学实验》 报告册 —学年第学期 专业: 班级: 姓名: 学号: 物理化学实验是继无机化学实验、分析化学实和有机化学实验之后的一门基础实验课。综合了化学领域中各分支所需的基本研究工具和方法,通过实验的手段,研究物质的物理化学性质以及这些物理化学性质与化学反应之间的关系,从而形成规律的认识,使学生掌握物理化学的有关理论、实验方法和实验技术,以培养学生分析问题和解决问题的能力。 物理化学实验的主要目的是使学生能够掌握物理化学实验的基本方法和技能,从而能够根据所学原理设计实验,正确选择和使用仪器,培养学生正确地观察现象,记录数据和处理数据以及分析式样结果的能力;培养学生严肃认真、实事求是的科学态度和作风;通过物理化学实验课程的教学还可以验证所学的原理,加深和巩固对物理化学原理的理解,提高学生对物理化学知识灵活运用的能力。 为了达到上述目的,必须对学生进行正确而严格的基本操作训练,并提出明确的要求。实验过程中的具体要求分为以下三个方面: 一、实验前的预习 1.实验前必须充分预习,明确实验内容和目的,掌握实验的基本原理,了解所用仪器、仪表的构造和操作规程,熟悉实验步骤,明确实验要测量的数据并做好实验记录。 2.写出预习报告,内容包括实验目的、原理和简单的实验内容提要,针对实验时要记录的数据详细地设计一个原始数据记录表格,预习报告在实验前交教师检查。 二、实验过程 1.进入实验室后不得大声喧哗和乱摸乱动,根据教师安排按实验台编号进入到指定的实验台,检查核对所需仪器。 2.不了解仪器使用方法前不得乱试,不得擅自拆卸仪器。仪器安装调试好后,必须经教师检查无误后方能进行实验。 3.遇有仪器损坏,应立即报告,检查原因,并登记损坏情况。 4.严格按实验操作规程进行,不得随意改动,若确有改动的必要,事先应取得教师的同意。5.应注意养成良好的记录习惯。记录数据要求完全,准确.、整齐、清楚。所有数据应记录在预习报告上,不能只拣好的记,不得用铅笔或红笔记录。要采用表格形式记录数据。不能随意涂改数据。如发现某个数据有问题应该舍弃时,可用笔先将其划掉,再写出正确数据。6.充分利用实验时间,观察现象,记录数据,分析和思考问题,提高学习效率。 7.实验完毕,应将数据交教师审查合格并签字后,再拆实验装置,如数据不合格需补做或重做。 8.实验过程中应爱护仪器,节约药品。实验完毕后应仔细清洗和整理实验仪器,打扫实验室卫生。 三、实验报告 实验结束后,应严格地根据实验记录,对实验现象作出解释,写出有关反应,或根据实验数据进行处理和计算,作出相应的结论,并对实验中的问题进行讨论,独立完成实验报告,及时交指导教师审阅。书写实验报告应字迹端正,简明扼要,整齐清洁。 奥迪导航升级教程 升级地图可以不需要发动车辆,开车也可以升级,不需要刷隐藏的工程糢式,不用删除地图。 升级过程需要60到70分钟左右,不要长时间离开车,比如一夜或者超过三四个小时,要不然屏幕会耗电,导致电瓶馈电,不能正常着车 固件为0395或者以上的车升级请联系店主,由于固件加密了,需要先破解了在升级导航,固件0395之前可以直接升级导航,购买时咨询过店主的车可直接升级。 有些个别车在升级途中出错,是单个文件数据量比较大的原因,注意拷贝数据时取卡别急,还有就是如果PCTVGA出错,点重试就可以了,如果是INDEX出现错误,点重试无效的话,就取消退出升级,换到SD2卡槽插入接着再来重新升级如果依旧出错就把卡格式化把数据重新复制然后重新升级 适用车型A4L、A5、A6L、A8L、Q5、S5等原厂硬盘版(3GMMI系统)奥迪导航升级系列 3G奥迪车型导航仪外观如下图显示 将更新用的SD卡放入到SD1中 首先按下RADIO按键,调成收音机模式 然后同时按住SETUP+RETURN 两个按键同时按住大概6秒左右(此步骤很重要SETUP+RETURN一定要同时同步安稳,SETUP 按键稍微提前一点点,否则进入的是导航设置) 新款的车按住BACK+CAR 两个按键同时按住大概6秒,CAR按键稍微提前一点点。 进入到奥迪工程模式,选择软件下载 选择SD卡槽 根据提示进行下一步的操作,选择标准 下一步转动大圆扭 因为其他的部件不在这个地图数据中,所以不需要更新,显示都为不适用,有更新的会提示为:是 调到最后一个选项:开始下载 选择:开始 武汉大学试卷纸 GPS电子地图的设计 李庆君 (武汉大学资源与环境科学学院,湖北武汉,430000) 摘要随着计算机科学技术和地理信息系统以及全球卫星定位系统(GPS)的发展,产生了一门新的应用领域——GPS 电子地图。根据电子地图的特点,介绍了GPS 电子地图系统的结构、功能、实现原理、系统结构、功能设计、技术难点及解决方法等关键技术。 关键词电子地图,地理信息系统(GIS),全球定位系统(GPS) 1 引言 近年来,我国车载导航技术得到了很大的发展,导航电子地图的覆盖范围也在逐步扩大,但现势性距实际导航需求还有一定差距。为加快导航电子地图采集与更新,建立一个高效率的导航电子地图的制作系统很有必要。 导航电子地图是将GPS或北斗接收到的卫星信息经过计算机处理后,把GPS或北斗接收器所在位置定位在地理底图上,并显示在屏幕上GPS 电子地图是导航、计算机图形学、数据库、地理信息系统(GIS)等技术的综合应用,而且它已经越来越多地受到人们的重视,并已被广泛应用到诸多领域,它可安装在移动目标(例如车船、飞机)上,也可用于目标跟踪。本文以笔者参与开发的系 统为例详细介绍该类系统的设计与实现技术。 2 原理及系统结构 2.1 原理 系统主要分为采集和编辑2个模块。采 集是利用GPS技术进行导航和道路信息采集,其工作原理是:两台测量型GPS接收机,一 台为固定站,放置在已知控制点上,另一台 放置在车辆上作为流动站,流动站GPS接收 机与便携机联机作业,系统采集模块同时进 行GPS定位数据采集存储,单点定位方式导 航可视化采集道路属性信息和兴趣点等信息。在采集结束后,把固定站数据与流动站数据 进行后差分处理,从而获得高精度道路坐标。 便携式导航仪地图升级图 文教程 Prepared on 22 November 2020 便携式导航仪地图升级图文教程 (一)升级流程图 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为 PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮 或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号; 注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版 6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、 E800TV版 7寸: E700S、E700精装版、E700 普清版本:(适用于寸普清屏) 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6 3、备份原导航中的地图文件并删除整个地图文件夹; 用数据线连接电脑后,打开导航盘符,把对应的地图文件夹拷到电脑中进行备份,以避免升级失败时还原旧地图用; 步骤: A)、用数据线与电脑相连后,打开我的电脑,找到新出现的盘符 导航电子地图制作-----------------张铁成 1、导航系统帮助驾驶者准确、快捷的到达目的地,其功能一般不包括()。 A、实时定位 B、目的地检索 C、自动驾驶 D、路线规划 答案:C 解答:导航系统能够实现实时定位、目的地检索、路线规划、画面和语音引导等功能,一般不包括自动驾驶。 2、导航系统一般由()构成。 A、定位系统 B、电视接收 C、硬件系统 D、软件系统 E、导航电子地图答案:ACDE 3、目前主要的定位系统是以航天技术为基础,以高速运动的卫星瞬间位置为已知数据,采用空间距离()的方法,技术待测点位置的系统。 A、前方交会 B、后方交会 C、侧方交会 D、成果汇交 答案:B 4、定位系统组成通常由()组成。 A、空间部分 B、控制部分 C、客户端 D、车载电子狗 答案:ABC 5、目前世界上的卫星导航定位系统有()。 A、GPS B、格洛纳斯 C、高德 D、北斗 E、伽利略 答案:ABDE 6、()是整个GPS车载导航系统的心脏。 A、车载主机 B、显示器 C、定位系统 D、其他控制模块 答案:C 7、导航应用软件的基本功能包括()。 A、定位与显示 B、地图浏览与信息查询 C、地图编辑 D、语音引导 E、智能路线规划 答案:ABDE 8、导航电子地图的特点包括()。 A、能够查询目的地信息 B、存有大量能够用于引导的交通信息 C、用户能够编辑导航电子地图 D、需要不断进行实地信息更新和扩大采集答案:ABD 9、导航硬件平台包括()。 A、车载主机 B、电视接收机 C、显示器 D、DVD播放机 E、定位系统 答案:ACE 10、()是含有空间位置地理坐标,能够与空间定位系统结合,准确引导人或交通工具从出发地到达目的地的电子地图或数据库。 A、多媒体地图 B、数字地图 C、导航电子地图 D、云地图 答案:C 11、高质量电子地图数据的关键因素不包括()。 A、数据信息丰富 B、图面清晰美观 C、信息内容准确 D、数据现势性高答案:B 12、()不是导航电子地图具有的特点。 A、能够查询目的地信息 B、存有大量能够用于引导的交通信息 C、集成了影音娱乐平台 D、需要不断进行实地信息更新和扩大采集 答案:C 13、导航电子地图的POI的内容部不包括()。 A、道路名 B、交叉点 C、邮编检索 D、铁路数据 答案:D 14、导航电子地图的背景数据不包括()。 A、地貌 B、水系 C、植被 D、铁路数据 答案:A 15、导航电子地图产品设计阶段,根据需求分析的结果、生产计划、资源配置情况,进行产品设计,其设计内容不包括( )。 A、制作成导航电子地图数据库 B、成本预算、资源配置 C、品质要求、风险控制 D、产品计划、产品范围 答案:A 16、以下有关导航电子地图制作过程中不正确的说法是()。 A、导航电子地图制作需经过需求分析和需求评审 B、从国家权威部门或市场收集公共情报信息 C、导航电子地图数据库制作主要是根据现场采集成果进行相应的加工处理 D、导航地图经过制作单位的严格检查无误后可上市销售。 答案:D 17、导航电子地图生产中通过外业专业人员利用专业设备实地采集的相关信息不包括()。 A、新增或变化道路的形状 B、道路网络连接方式 C、道路属性、兴趣点 D、国界和国内各级行政区划界线 答案:D 18、导航电子地图数据采集过程中所要遵循的规格要求不包括()。 A、采集对象 B、采集条件 C、记录方式 D、数据库制作标准 中科大实验报告封面 篇一:中科大地图导航(实验报告) 中科大地图导航 一,科大西区地图的构建与表示: (1)、物理地图的抽象表达 地图选择:科大西区地图 节点数:12 边数:15 地点信息:地点名,时间,简介,街道名,街道长度(权值) 注释:该图为对科大地图抽象的结果。 1 / 11 各顶点信息(地点信息和边信息严格按原地图制作,故直接见地图): 1 :北门2:圆盘岔路口 3:东路岔路口 4:核科学院 5:生命科学院 6:西区学生活动中心 7:校车站 8:电三楼9:火灾重点实验室 10:南环路岔路口11:国家同步实验室。(计算机中表示顶点号要减去1) (2)、地图信息的计算机信息表达 图文件节点代码(采用邻接表方式存储): 图信息定义于“节点定义.h”中,用于底层数据类型支持,其中重载了图的输入输出运算符,图中的节点和边的比 较与赋值运算符等。 #define MAX_VERTEX_NUM 20 typedef struct InfoType //边信息 { int length; char* name; }InfoType; typedef struct VertexType//地点信息 { char* name; char* time; char* scribe; VertexType& operator =(VertexType& b); }VertexType; typedef struct ArcNode //边 { int adjvex; *nextarc; 2 / 11 ArcNode InfoType *info; ArcNode& operator =(ArcNode& b); }ArcNode; typedef struct VNode //图的邻接表 { VertexType* data; ArcNode *firstarc; VNode& operator=(VNode& a); }VNode,AdjList[MAX_VERTEX_NUM]; 约束优化设计实验报告 力学系型号:联想y470 CPU:i5-2450M 内存:2GB 系统:win7-64位 求解问题: 如上是以下三个约束方法共同需要求解的问题,预估结果:在(x1,x2,x3)≈(23,13,12)点附近存在极值。其中,每个方法对应的初始条件分别为: (1)随机试验法 设计变量范围: 随机试验点数:N=1000 精度:eps=0.001 (2)随机方向法 初始点:x0=(25,15,5) 初始步长:a0=0.5 精度:eps=0.001 (3)线性规划单纯形法 初始复合形:X=[20 23 25 30;10 13 15 20;10 9 5 0] 顶点个数:n=4 精度:eps=0.01 计算结果: 程序说明:主程序为main,运行main后按提示即可得到相应约束方法的求解结果。 程序如下: 1、主程序 clear; global kk; kk=0; disp('1.随机试验法'); disp('2.随机方向法'); disp('3.线性规划单纯形法'); while 1 n0=input('请输入上面所想选择约束优化方法的编号(1、2、3):'); if n0==1||n0==2||n0==3 break; end disp('此次输入无效.'); end disp(' '); disp('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~'); [xx,yy]=fmins(n0); fprintf('迭代次数为:%8.0f\n', kk); disp('所求极值点的坐标向量为:'); fprintf(' %16.5f\n', xx); fprintf('所求函数的极值为:%16.5f\n', yy); 2、调用函数 function [xx,yy]=fmins(n0) if n0==1 tic;[xx,yy]=suijishiyan();toc; elseif n0==2 tic;[xx,yy]=suijifangxiang();toc; elseif n0==3 tic;[xx,yy]=danchunxing();toc; 便携式导航仪地图升级图文教程 (一)升级流程图 步骤如下: 1、下载对应的地图(高清下载高清版本,普清下载普清版本); 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮 或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号; 注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) https://www.360docs.net/doc/c57347386.html,/rodey/ditu/2011-01/KLD(20110110_800x480).rar 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、E800TV版7寸: E700S、E700精装版、E700 普清版本:(适用于4.3寸普清屏) https://www.360docs.net/doc/c57347386.html,/rodey/ditu/2011-01/KLD(20110110_480x272).rar 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6 算法实验报告 快速排序 1. 问题描述: 实现对数组的普通快速排序与随机快速排序 (1)实现上述两个算法 (2)统计算法的运行时间 (3)分析性能差异,作出总结 2. 算法原理: 2.1快速排序 快速排序是对冒泡排序的一种改进。它的基本思想是:选取一个基准元素,通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比基准元素小,另外一部分的所有数据都要比基准元素大,然后再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。 设要排序的数组是A[0]……A[N-1],首先选取一个数据(普通快速排序选择的是最后一个元素, 随机快速排序是随机选择一个元素)作为关键数据,然后将所有比它小的数都放到它前面,所有比它大的数都放到它后面,这个过程称为一趟快速排序。 一趟快速排序的算法是: 1)设置两个变量i、j,排序开始的时候:i=0,j=N-1; 2)以第一个数组元素作为关键数据,赋值给key,即key=A[0]; 3)从j开始向前搜索,即由后开始向前搜索(j--),找到第一个小于key的值A[j],将A[j]赋给A[i]; 4)从i开始向后搜索,即由前开始向后搜索(i++),找到第一个大于key的A[i],将A[i]赋给A[j]; 5)重复第3、4步,直到i=j;(3,4步中,没找到符合条件的值,即3中A[j]不小于key,4中A[i]不大于key的时候改变j、i的值,使得j=j-1,i=i+1,直至找到为止。找到符合条件的值,进行交换的时候i,j指针位置不变。另外,i==j这 一过程一定正好是i+或j-完成的时候,此时令循环结束)。 2.2随机快速排序 快速排序的最坏情况基于每次划分对主元的选择。基本的快速排序选取第一个或者最后一个元素作为主元。这样在数组已经有序的情况下,每次划分将得到最坏的结果。一种比较常见的优化方法是随机化算法,即随机选取一个元素作为主元。这种情况下虽然最坏情况仍然是O(n^2),但最坏情况不再依赖于输入数据,而是由于随机函数取值不佳。实际上,随机化快速排序得到理论最坏情况的可能性仅为1/(2^n)。所以随机化快速排序可以对于绝大多数输入数据达到O(nlogn)的期望时间复杂度。 3. 实验数据 本实验采用对80,000个随机数据进行十次排序,并取出平均值。分别用普通快速排序和随机快速排序对数据排序。用毫秒作为运行计数单位,观测两种算法所用的时间的不同。 4. 实验截图 如下图所示的时间,普通快速排序所用的平均时间为181毫秒,而随机化版本的快速排序所用时间仅仅为119毫秒。 5. 结果分析 5.1 时间分析 从实验截图得到的结果来看,随机化版本的快速排序所用时间比普通快速排序所用的平均时间少。 快速排序的平均时间复杂度为O(nlogn),最坏时间时间可达到O(n^2),最坏情况是当要排序的数列基本有序的时候。根据快速排序的工作原理我们知道, 物理化学实验报告实验人:***** 学号:********* 班级: ********** 实验日期:2012/3/17 实验一计算机联用测定无机盐溶解热 一、实验目的 的积分溶解热。 (1)用量热计测定KNO 3 (2)掌握量热实验中温差校正方法以及与计算机联用测量溶解过程动态曲线的方法。 二、实验原理 盐类的溶解过程通常包含着两个同时进行的过程:晶格的破坏和离子的溶剂化。前者为吸热过程,后者为放热过程。溶解热是这两种热效应的总和。因此,盐溶解过程最终是吸热或放热,是由这两个热效应的相对大小决定的。在恒压条件下,由于量热计为绝热系统,溶解过程所吸收的热或放出的热全部由系统温度的变化放映出来。如下图: △H △H 1=0 绝热 由图可知,恒压下焓变△H 为△H 1和△H 2之和,即:△H=△H 1+△H 2 绝热系统,Q p =△H 1所以,在t 1温度下溶解的恒压热效应△H 为:△H=△H 2=K (t 1-t 2)=-K(t 2-t 1) 式中K 是量热计与KNO 3水溶液所组成的系统的总热容量,(t 2-t 1)为KNO 3溶解前后系统温度的变化值△t 溶解。 设将质量为m 的KNO 3溶解于一定体积的水中,KNO 3的摩尔质量为M ,则在此浓度下KNO 3的积分溶 解热为:△sol H m =△HM/m=-KM/m ·△t 溶解 K 值可由电热法求取。K ·△t 加热 =Q 。若加热电压为 U ,通过电热丝的电流强度为I ,通电时间为τ则:K ·△t 加热=IU τ 所以K =IU τ/△t 加热 真实的△t 加热应为H 与G 两点所对应的温度t H 与t G 之差。 三、 试剂与仪器 试剂:干燥过的分析纯KNO 3。 仪器:量热计,磁力搅拌器,直流稳压电源,半导体温度计,信号处理器,电脑,天平。 四、 实验步骤 1用量筒量取100mL 去离子水,倒入量热计中并测量水温。2称取~(精确到 量热器+水+ KNO 3 量热器+ KNO 3水溶液 量热器+ KNO 3水溶液 第十一章导航电子地图制作 第1节导航与导航电子地图 导航系统的构成 导航系统一般采用GPS与航位推算法(传感器+电子陀螺仪)组合方式实现定位,通过触摸显示屏或者遥控器进行交互操作,能够实现实时定位、目的地检索、路线规划、画面和语音引导等功能,帮助驾驶者准确、快捷地到达目的地。导航系统一般由定位系统、硬件系统、软件系统和导航电子地图四部分构成。 @#1 定位系统 1 定位系统 目前主要的定位系统是以航天技术为基础,以高速运动的卫星瞬间位置作为已知数据,采用空间距离后方交会的方法,计算待测点位置的系统。通常由空间部分、控制部分和客户端三部分组成。 除美国的全球定位系统gps外,目前世界上的卫星导航定位系统还有俄罗斯的"格洛纳斯"、欧盟"伽利略"以及我国的"北斗"。 到1994:年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。@#2硬件系统 2、硬件系统 导航硬件平台包括车载主机、显示器、定位系统和其他控制模块。车载主机是整个gps车载导航系统的心脏,车载主机由若干个电子控制单元(electric control unit,ecu)构成,它们可以独立完成特定的功能,并与其他单元模块协同工作。这些模块中最重要的是由gps接收机、航位推算(dead reckoning,dr)微处理器、车速传感器、陀螺传感器构成的定位模块。gps系统和dr系统组合构成的定位导航模块可以很好地解决短时间内丢失gps卫星信号的问题,又可以避免dr系统的误差随时间积累。目前普通民用gps和dr组合定位设备(gps惯性设备)已经可以达到1 000 m无gps信号的情况下的航向精度和10 m的距离精度。(惯性制导系统) @#3软件系统 3、软件系统 软件系统由系统软件和导航应用软件组成。 系统软件包括操作系统和设备驱动两部分。操作系统一般采用嵌入式实时操作系统(rtos),如国外的vx-work、qnx、palmos、windows ce和国内的hopen os 等。 导航应用软件是专门针对车载导航应用需求开发的软件系统,运行在车载主机中。基本功能包括:定位与显示、地图浏览与信息查询、智能路线规划、语 粘度法测定高聚物相对分子质量 一.实验目的 1.掌握用乌氏粘度计测定高聚物溶液粘度的原理和方法。 2.测定线型聚合物聚乙二醇的粘均相对分子质量。 二.实验原理 聚合物的相对分子质量是一个统计的平均值。粘度法测定高聚物相对分子质量适用的相对分子质量范围为1×104~1×107,方法类型属于相对法。 粘性液体在流动过程中所受阻力的大小可用粘度系数来表示。粘度分绝对粘度和相对粘度。绝对粘度有两种表示方法:动力粘度和运动粘度。相对粘度是某液体粘度与标准液体粘度之比。 溶液粘度与纯溶剂粘度的比值称作相对粘度ηr,即ηr=η/ηo,相对于溶剂,溶液粘度增加的分数称为增比粘度,ηsp=ηr-1。 使用同一粘度计,在足够稀的聚合物溶液里,ηr=η/ηo=t/t o,只要测定溶液和溶剂在毛细管中的流出时间就可得到ηr;同时,在足够稀的溶液里,质量浓度c,ηr和[η] 之间符合经验公式:(lnηr)/c=[η]-β[η]2c,通过lnηr/c对c作图,外推至c=0时所得截距即为[η];同时,在足够稀的溶液里,质量浓度c,ηsp和[η]之间符合经验公式:ηsp/c=[η]+k[η]2c,通过ηsp/c对c作图,外推至c=0时所得截距即为[η]。两个线性方程作图得到的截距应该在同一点。 聚合物溶液的特性粘度[η]与聚合物相对分子质量之间的关系,可以通过Mark——Houwink经验方程来计算,[η]=KMηα;Mη是粘均相对分子质量,K、α是与温度、聚合物及溶剂的性质相关的常数;聚乙二醇水溶液在30℃的K值为12.5×106/m3·kg-1,α值为0.78。 通过以上的原理阐述,就可以通过本次实验测定高聚物的粘均相对分子质量。三.实验仪器和试剂 仪器:恒温槽1套;乌氏粘度计1支;100ml容量瓶5只;秒表1只。 试剂:聚乙二醇(AR);去离子水。 四.实验步骤 1.设定恒温槽温度为30℃±0.5℃。 2.配制溶液。8%(质量分数)的聚乙二醇溶液5ml、10ml、15ml、20ml、25ml定容于100ml容量瓶中。 3.洗涤粘度计。 4.测定溶剂流出时间t o,测定不同浓度的溶液流出时间t。 五.数据记录与处理 实验室室温:28.5℃大气压:101.52Kpa t o:纯溶剂在a、b线移动所需时间; t1:5ml8%聚乙二醇溶液定容于100ml容量瓶中溶液在a、b线移动所需时间; t2:10ml8%聚乙二醇溶液定容于100ml容量瓶中溶液在a、b线移动所需时间; t3:15ml8%聚乙二醇溶液定容于100ml容量瓶中溶液在a、b线移动所需时间; t4:20ml8%聚乙二醇溶液定容于100ml容量瓶中溶液在a、b线移动所需时间; t5:25ml8%聚乙二醇溶液定容于100ml容量瓶中溶液在a、b线移动所需时间; 所有溶液的密度以1×103kg/m3的水的标准密度,以简化计算。 教你怎么升级导航地图 有车就要出去玩,出去玩就要导航,有导航就要升级。呵呵。:office: 就像我车上的车载导航,每个段时间我也要为导航升级一次,下面我就提供一些导航升级的方法; 一、动手之前 1、了解导航仪 从宏观上直接能够辨别的,是车载机还是便携机;是正版机还是山寨机;是原装的还是加配的;是一体的还是分体的;...一般来说,车载原装导航很难自己升级,有的需用光盘及专用输入仪器升级,有的导航软件是在内置硬盘或存储卡中,并且软件固化加密,甚至有锁死端口的暗箱程序,若是这样的导航,劝君罢手,喜欢折腾就弄个山寨机玩玩.有的便携式正版导航,设有内卡和外卡,把主要参数固定在加密的内卡上,只允许升级原有地图,很难变更版本,这一类便携导航也不在自行折腾之列。除此之外,其它种类的导航仪,你都可以对它发号施令了.当然由于导航仪自身的系统方案、架构的特殊性,像个别的老款天派、科骏达和飞利浦mips架构等导航仪,对地图非常挑剔;甚至有的索菱机子对大卡和小卡的要求也非常严格,只认apacer品牌的大小合卡;遇到这样的机子在折腾时会给你带来的不同程度的困难,下手前要有一定的思想准备。 2、了解自己 自己是否有一点电脑方面的基础知识(因为导航仪本身就是一台小电脑——单板机),是否知道什么是路径、根目录、批处理文件、可执行文件等一些名词;是否具备下载并安装一些工具软件以及修改文件名、启动路径的基本能力。 搞清了上述两个方面,就可以决定是否折腾你的导航了,如果心里没底,激流勇退也不失为上策,识时务者为俊杰嘛,我们就此拜拜! 二、磨刀不误砍柴工 既然想继续折腾,就先了解点升级导航的必备知识,有助于你查资料做对比,请教高手时能听明白对方的指导。 1、圈内行话 升级导航,一般是对软件的升级(硬件升级比较简单,就是购买+安装),而导航的软件主要包括两大部分:一部分是地图数据,另一部分是主程序。 折腾导航者通常采用如下术语: ①.机油=GY(GPS之友)=升级导航者 ②.兔子=图资=地图 ③.种子=主程序 ④.O文件=OEM=破解文件 ⑤.带壳O文件=不能改动的破解文件 ⑥.去壳O文件=可以修改的破解文件 ⑦.去癍=去除地图界面上的额外印记 ⑧.漂=图上显示位置与实际地理位置时符时不符的现象 ⑨.搜星=搜索到卫星信号 ⑩.跳星=定位显示很不连贯,图标有“蹦”或者“迟滞”的现象。 ⑾.杂交=把不是同一个版本的主程序和地图结合在一起 2、专业名词的直白解释 ①.端口——接收卫星信号的通道,设置不对则不能搜星;物理化学实验报告.
便携式导航仪地图升级图文教程
导航电子地图制作专业标准
物化实验报告燃烧热的测定
导航软件升级步骤指引
中科大信号与系统 实验报告2
物化实验报告册
奥迪 导航升级教程
电子地图设计-导航电子地图设计方案-设计与实现
便携式导航仪地图升级图文教程
导航电子地图制作.
中科大实验报告封面
中科大《优化设计》课程大作业之约束优化实验报告
便携式导航仪地图升级图文教程
中科大软件学院算法实验报告
物理化学实验报告
导航电子地图制作
物化实验实验报告
教你怎么升级导航地图