将全站仪中测量的坐标高程导出并导入CAD中的方法
将全站仪中测量的坐标、高程导出并导入CAD中的方法
以全站仪RTS112RL为例:
1、全站仪开机,将全站仪设置为USB模式。
2、将全站仪与电脑用数据线连接
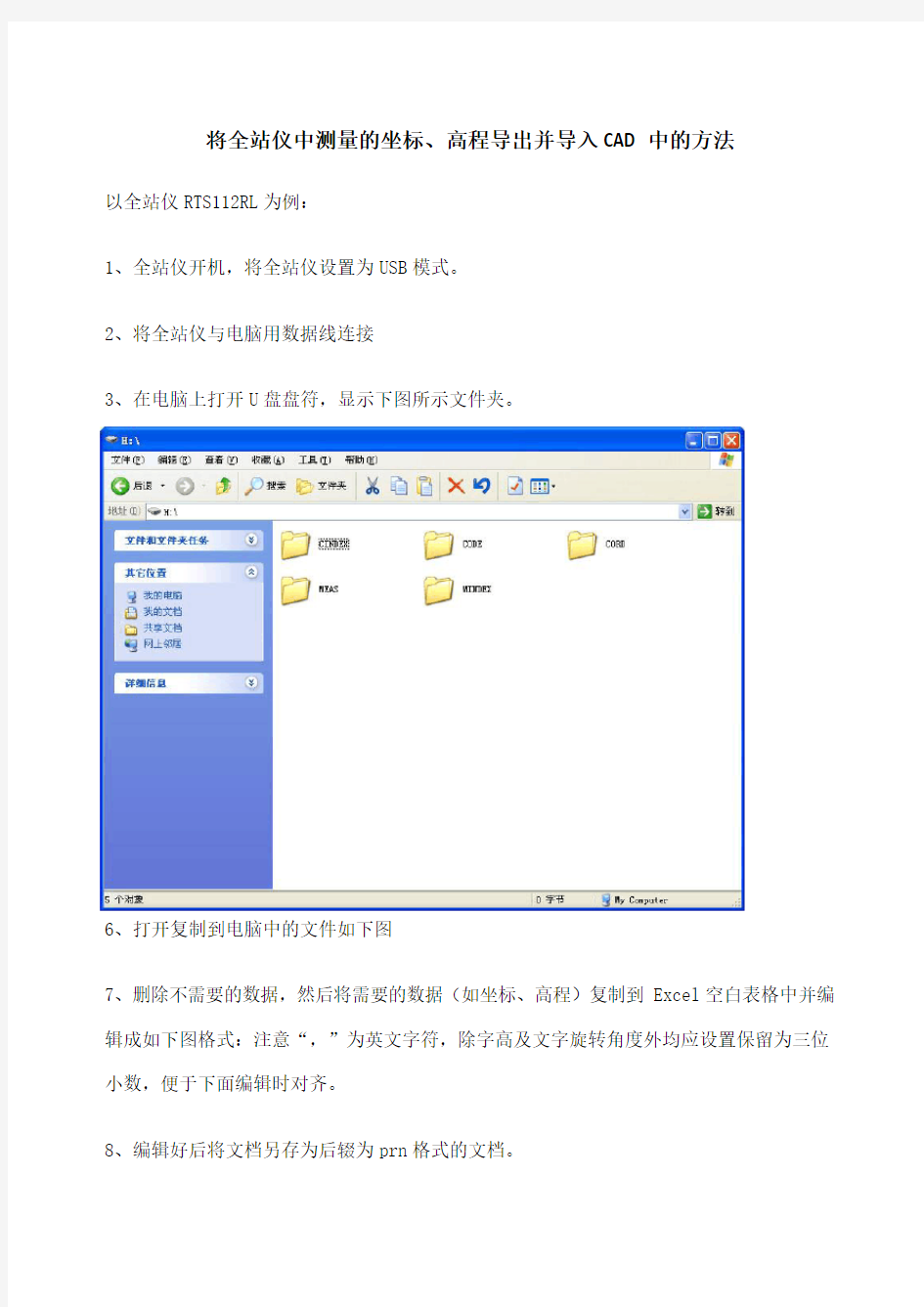
3、在电脑上打开U盘盘符,显示下图所示文件夹。
其中:CINDEX:坐标点号列表文件夹
CODE:属性文件夹
CORD:坐标数据文件夹
MEAS:测量数据文件夹
MINDEX:测量点号列表文件夹
4、打开需要导出文件的文件夹,选择需要导出的文件,点击右键
5、将该文件复制至电脑。
6、打开复制到电脑中的文件如下图
7、删除不需要的数据,然后将需要的数据(如坐标、高程)复制到Excel空白表格中并编辑成如下图格式:注意“,”为英文字符,除字高及文字旋转角度外均应设置保留为三位小数,便于下面编辑时对齐。
8、编辑好后将文档另存为后辍为prn格式的文档。
9、用记事薄打开prn格式文档,如下图
将所有数据之间的空格用替换方式替换成一个字符宽的空格(仅能一个字符宽的空格,否则会出错)。编辑完成后另存为后辍为scr格式保存。
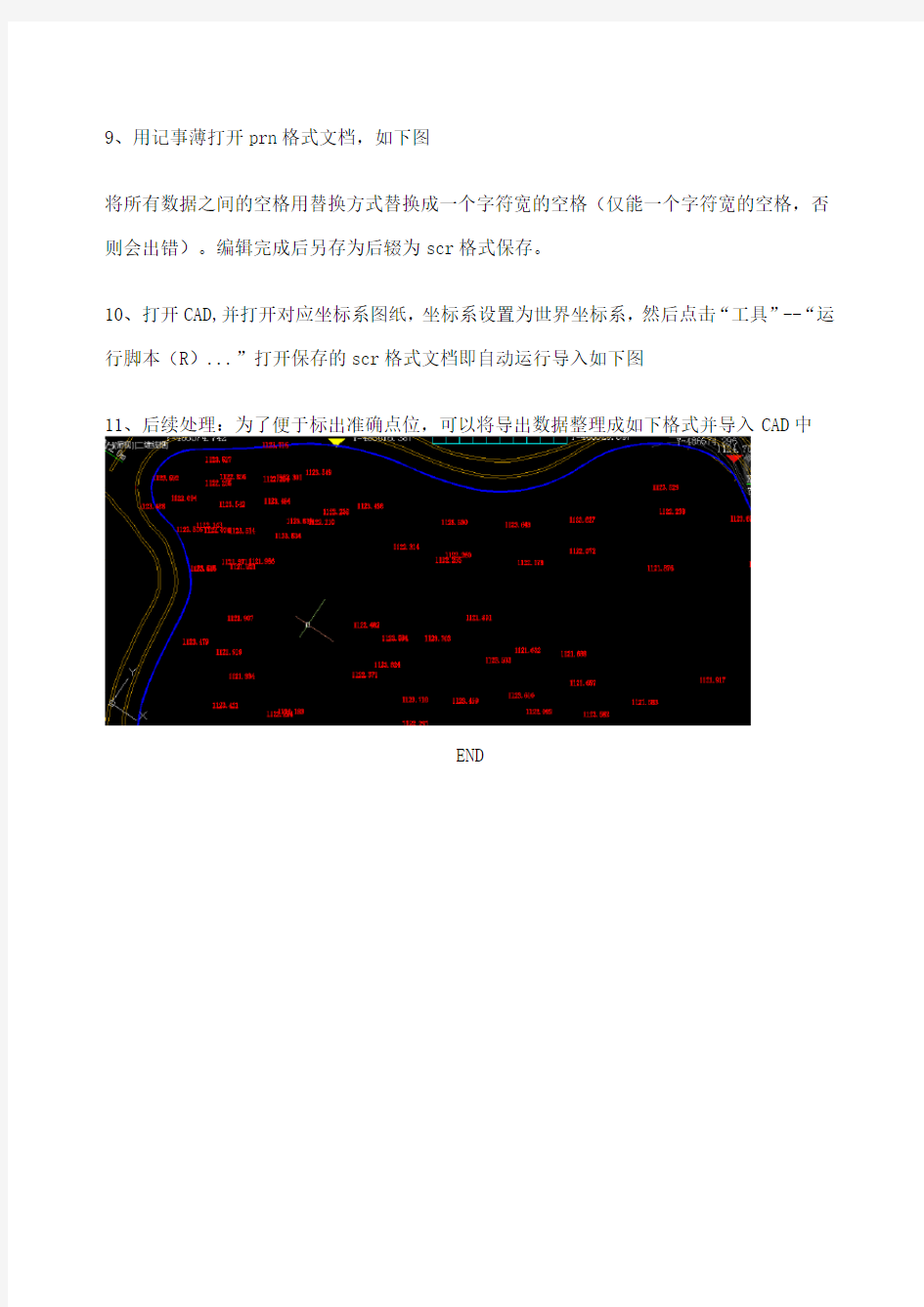
10、打开CAD,并打开对应坐标系图纸,坐标系设置为世界坐标系,然后点击“工具”--“运行脚本(R)...”打开保存的scr格式文档即自动运行导入如下图
11、后续处理:为了便于标出准确点位,可以将导出数据整理成如下格式并导入CAD中注:导入方法
将Excel表中编辑好的数据(如下图)复制
打开CAD并打开已用1~9的方法已导入数据的图纸,点击菜单line,
在命令行中右键并粘贴刚才复制的数据即可自动导入,导入后如下图:
END
全站仪测量高程
全站仪测量高程 量仪器高法: 就是在设站的时候量取仪器高,输入仪器高,菱镜高即可,量仪器高的时候是从已知高程控制点量到仪器中心的距离,并不是地面到仪器中心的距离。 这种方法不建议使用,如果对标高要求不高的话可以使用。例如地形图的测绘可以使用。 测量高差法: 如果对坐标没有要求,只需要测出高程,那不需要架设在控制点上,随便找个位置整平即可,先在已知高程点上测一下,仪器会显示出X Y Z,X和Y不管,只看Z。记下Z的数据,然后再拿去待测点测一下,同理记下Z的数据。求出这两个数据的差值就可以算出待测点的高程,比如;已知高程42米,在已知点的读数5.263,待测点的读数4.263。那待测点的高程就是41米。有时候仪器会显示负的读数,没关系,同理即可!需要记住的是菱镜高不能变动。 这种方法的使用原来跟水准仪一样了。测量精度较高,推进使用。特别适用于深基坑的高程测量。 改变仪器高法: 如果你有已知高程点32米,那你就把仪器高设置32左右,随便设,把菱镜立在已知高程点上,测一下,如果仪器显示比已知高程点高了,你就把仪器高改一下。举例说明;已知高程点35.5米,仪器整平,进入测量界面,输入仪器高36米(有的仪器在测量界面就可以直接输入,有的要在后视界面设置),菱镜高输入1.2米(一般是1.2米,随便输入也可以)。然后把菱镜立在已知高程点上测一下,仪器显示34.8米,说明比已知高程低了.7米,那就把仪器高升高0.7米,改为36.7米,在测一下,仪器显示35.5米,那说明测量对了(如果不对,那还得试一下。反正总可以弄到和已知高程点一样的,摸索摸索!),想测什么就测什么了。这种方法也很好用。 最后说明一下,全站仪测量高程的精度没有水准仪高,因为仪器瞄准的时候是尽可能的瞄准菱镜中心,如果上下移动一点对高程都有影响。测量距离远的话更是不准。大概是2CM左右。建议不在迫不得已的时候不要使用全站仪测量精度要求高的点。
全站仪具有角度测量
全站仪的使用 全站仪具有角度测量、距离(斜距、平距、高差)测量、三维坐标测量、导线测量、交会定点测量和放样测量等多种用途。内置专用软件后,功能还可进一步拓展。全站仪的基本操作与使用方法: 水平角测量 (1)按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。(2)设置A方向的水平度盘读数为0°00′00〃。 (3)照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。距离测量 (1)设置棱镜常数 测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。 (2)设置大气改正值或气温、气压值 光在大气中的传播速度会随大气的温度和气压而变化,15℃和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。实测时,可输入温度和气压值,全站仪会自动计算大气改正值(也可直接输入大气改正值),并对测距结果进行改正。 (3)量仪器高、棱镜高并输入全站仪。 (4)距离测量 照准目标棱镜中心,按测距键,距离测量开始,测距完成时显示斜距、平距、高差。 全站仪的测距模式有精测模式、跟踪模式、粗测模式三种。精测模式是最常用的测距模式,测量时间约2.5S,最小显示单位1mm;跟踪模式,常用于跟踪移动目标或放样时连续测距,最小显示一般为1cm,每次测距时间约0.3S;粗测模式,测量时间约0.7S,最小显示单位1cm或1mm。在距离测量或坐标测量时,可按测距模式(MODE)键选择不同的测距模式。 应注意,有些型号的全站仪在距离测量时不能设定仪器高和棱镜高,显示的高差值是全站仪横轴中心与棱镜中心的高差。 坐标测量 (1)设定测站点的三维坐标。 (2)设定后视点的坐标或设定后视方向的水平度盘读数为其方位角。当设定后视点的坐标时,全站仪会自动计算后视方向的方位角,并设定后视方向的水平度盘读数为其方位角。 (3)设置棱镜常数。 (4)设置大气改正值或气温、气压值。 (5)量仪器高、棱镜高并输入全站仪。 (6)照准目标棱镜,按坐标测量键,全站仪开始测距并计算显示测点的三维坐标。 全站仪的数据通讯 全站仪的数据通讯是指全站仪与电子计算机之间进行的双向数据交换。全站仪与计算机之间的数据通讯的方式主要有两种,一种是利用全站仪配置的PCMCIA (personal computer memory card internation association,个人计算机存储卡
全站仪坐标计算公式[1]共16页文档
全站仪的功能介绍 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。(2)方法:与经纬仪相同,若要测出水平角∠ AOB , 则: 1)当精度要求不高时: 瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水 平度盘 HR 的大小。 2)当精度要求高时:——可用测回法( method of observation set )。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置 盘”( H SET )。 2、距离测量( distance measurement ) PSM 、PPM 的设置——测距、测坐标、放样前。 1)棱镜常数(PSM )的设置。 一般: PRISM=0 (原配棱镜),-30mm (国产棱镜) 2)大气改正数( PPM )(乘常数)的设置。 输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。 (1)功能:可测量平距 HD 、高差 VD 和斜距 SD (全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement ) (1)功能:可测量目标点的三维坐标( X , Y , H )。 (2)测量原理 若输入:方位角,测站坐标(,);测得:水 平角和平距。则有: 方位角: 坐标: 若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有: 高程: (3)方法: 输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。 4、点位放样 (Layout) (1)功能:根据设计的待放样点 P 的坐标,在实地标出 P 点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。
全站仪后方交会法步骤和高程测量步骤
全站仪后方交会法步骤和 高程测量步骤 Revised final draft November 26, 2020
1、角度测量(angleobservation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB,则: 1)当精度要求不高时: 瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。 2)当精度要求高时:——可用测回法(methodofobservationset)。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。 2、距离测量(distancemeasurement) PSM、PPM的设置——测距、测坐标、放样前。 1)棱镜常数(PSM)的设置。 一般:PRISM=0(原配棱镜),-30mm(国产棱镜) 2)大气改正数(PPM)(乘常数)的设置。 输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。 (1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS)。 3、坐标测量(coordinatemeasurement) (1)功能:可测量目标点的三维坐标(X,Y,H)。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已
知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有: 高程: (3)方法: 输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD和角度差dHR或纵向差值ΔX和横向差值ΔY。 3)根据显示的dD、dHR或ΔX、ΔY,逐渐找到放样点的位置。
全站仪和坐标的计算
全站仪和坐标的计算 全站仪的功能介绍 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠ AOB ,则: 1)当精度要求不高时: 瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水平度盘 HR 的大小。 2)当精度要求高时:——可用测回法( method of observation set )。操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”( H SET )。 2、距离测量( distance measurement ) PSM 、PPM 的设置——测距、测坐标、放样前。 1)棱镜常数(PSM )的设置。 一般: PRISM=0 (原配棱镜),-30mm (国产棱镜) 2)大气改正数( PPM )(乘常数)的设置。 输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。 (1)功能:可测量平距 HD 、高差 VD 和斜距 SD (全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement ) (1)功能:可测量目标点的三维坐标( X , Y , H )。 (2)测量原理 若输入:方位角,测站坐标(,);测得:水平角和平距。则有:方位角: 坐标: 若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有: 高程: (3)方法: 输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。 4、点位放样 (Layout) (1)功能:根据设计的待放样点 P 的坐标,在实地标出 P 点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值 dD 和角度差 dHR
全站仪三角高程测量方法
应用全站仪进行三角高程测量的新方 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A,只要知道A 点对B点的高差H AB即可由H B=H A+H AB得到B点的高程H B。 此主题相关图片如下: 图中:D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高
HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h AB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t 故 H B=H A+Dtanа+i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A=H B-(Dtanа+i-t) (2) 上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知: H A+i-t=H B-Dtanа=W(3) 由(3)可知,基于上面的假设,H A+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。 这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。 2、用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。施测前不必设定。)
全站仪进行高程测量的几个方法
全站仪进行高程测量的几个方法的探讨 王晓涛 摘要:全站仪在公路工程施工中的使用越来越普遍,利用全站仪测量高程,在施工中越来越受到关注。根据工程施工中的实践,总结出全站仪测量高程的几种方法,使全站仪三角高程测量精度进一步提高,提高了施测速度与准确性。 关键词:全站仪高程测量方法 在现有公路工程施工中,高程测量传统方法是水准测量、三角高程测量。两种方法各有利弊,水准测量是一种直接测量高程的方法,测量高差的精度较高,但受地形的影响大,转站多,施测速度慢。随着全站仪在公路施工广泛普及应用,用全站仪测量高程越来越受到施工测量人员的青睐。现就全站仪测量高程的几种方法结合施工过程中的实践,对传统方法和新方法 探讨一下。 一、利用三角高程测量的传统方法: D V t а i hAB HA HB 高程基准面 图中: D :为A、B两点间的水平距离 а:为A点观测B点时的垂直角 i 为测站点的仪器高 t :为棱镜高 HA:为A点高程 HB:为B点高程 V :为全站仪望远镜和棱镜之间的高差(V=D×tgа) 传统方法步骤: 在已知高程点A点架设仪器,量取仪器高i、棱镜高t,输入全站仪测得AB之间的平距D, 则HB高程为: HB=HA+D×tgа+i-t ① 此方法以水平面为基准面,只有当A、B两点的距离较近时,测量质量才比较准确,当距离远时还必须要考虑到地球曲率、大气折光对距离的影响。在人员量取仪器高、棱镜高时,量取数据误差大、精度不高,影响测量精度的误差来源比较多。而且传统方法进行高程测量,仪器必须架设在已知高程的点位上,必须量取仪器高、棱镜高。对要测点如果不通视的无法 施测,有一定的局限性。 二、利用新方法高程测量 内蒙古二赛一级公路二合同段地处平原微丘,线路全长61.343km,地势平坦。一些GPS高程控制点离路线较远,最远的有1.4km,这些都加大水准点复测以及施工过程中的水准点加密的工作量。由于施工工期紧、测量人员有限,采用新的全站仪测量高程,提高了施测速度 及精度,满足了工程进度的需要。 基本原理:
全站仪的坐标测量如何使用-(经典)
全站仪的坐标测量如何使用? 如:测站点坐标为(500,300,362),后视点坐标为(500,445,456),测点坐标为(471.7,777.9,385)(以CAD画出的)。如何直接测出测点坐标? 全站仪的坐标测量你应该好好看看使用说明书! 一般来说分为这样几步: 1、输入坐标,测站点、后视点及要测的碎布点事先是家里输入进去的。具体在说明书里的数据录入这一块。 2、到了野外,首先是一起对中整平,开机后,进入坐标测量。 3、设置测站点。 4、设置后视点,这是很关键的是仪器不同,方法不同。 一般都要,拟设好后视点后,要对后视点进行一次测量,这个过程实际就是陪准坐标系统。关键关键!配好以后一起会将测量的后视点坐标直接显示出来,你可以和已有的坐标对照一下。一般来说。二者之差不大于5cm就可以拉 5、测量 一般全站仪测角精度都不是很高 还有对中误差,后视误差等等等等等 要求精度高可以用GPS静态测量 内容:了解全站仪的分类、等级、主要技术指标;掌握全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法;了解全站仪的对边测量、悬高测量、面积测量等方法。 重点:全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法。 难点:全站仪测三维坐标和三维坐标放样的原理和操作方法。 教学方法:采取演示法教学。讲解拓普康全站仪使用,在课堂上每讲一项功能后,利用多媒体课室的优点,现场演示一次,并将操作过程通过投影仪投影到屏幕上,起到直观、形象的效果,使学生能迅速掌握全站仪的使用。 § 7.1 全站仪(total station)的功能介绍
随着科学技术的不断发展,由光电测距仪,电子经纬仪,微处理仪及数据记录装置融为一体的电子速测仪(简称全站仪)正日臻成熟,逐步普及。这标志着测绘仪器的研究水平制造技术、科技含量、适用性程度等,都达到了一个新的阶段。 全站仪是指能自动地测量角度和距离,并能按一定程序和格式将测量数据传送给相应的数据采集器。全站仪自动化程度高,功能多,精度好,通过配置适当的接口,可使野外采集的测量数据直接进入计算机进行数据处理或进入自动化绘图系统。与传统的方法相比,省去了大量的中间人工操作环节,使劳动效率和经济效益明显提高,同时也避免了人工操作,记录等过程中差错率较高的缺陷。 全站仪的厂家很多,主要的厂家及相应生产的全站仪系列有:瑞士徕卡公司生产的TC 系列全站仪;日本TOPCN (拓普康)公司生产的GTS 系列;索佳公司生产的SET 系列;宾得公司生产的PCS 系列;尼康公司生产的DMT 系列及瑞典捷创力公司生产的GDM 系列全站仪。我国南方测绘仪器公司90 年代生产的NTS 系列全站仪填补了我国的空白,正以崭新的面貌走向国内国际市场。 全站仪的工作特点: 1、能同时测角、测距并自动记录测量数据; 2、设有各种野外应用程序,能在测量现场得到归算结果; 3、能实现数据流; 一、TOPCON 全站仪构造简介 图1为宾得全站仪PTS-V2 ,图2为尼康C-100 全站仪,图3为智能全站仪GTS-710,图4为蔡司Elta R系列工程全站仪,图5为徕卡TPS1100系列智能全站仪。 二、全站仪的功能介绍 1、角度测量(angle observation)
全站仪坐标测量方法步骤完整版
全站仪坐标测量方法步 骤 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
全站仪坐标测量方法步骤 1、架设仪器,对中、调平。 2、按“菜单(MENU)”键,后显示“数据采集”,按“F1”后,出现选择文件,按“F1”输入“文件名”后按“回车”。 3、按“F1`”测站点输入,输入点号、仪器高后,显示测站,再按“测站”后出现坐标输入,输入坐标后按回车键,出现“记录”,此时有个选择对话框,“是”与“否”,这时按“是”以保存,完成整个测站点的输入。 4、显示菜单里有个“后视”,按F2键输入点号棱镜镜高,按“后视---F4键”显示“AE/AZ”按“F3”键输入坐标,坐标输入完成后,出现“后视点号与镜高”,对准后视棱镜,按测量,显示“斜距”与“坐标”,按坐标镜后就可以进行坐标测量。测量完毕后按“是”以保存。保存后显示菜单下有个“前视”,按“前视”输入“棱镜高”后按测量,就可以测到“前视点的坐标”。如果接下来还要测其它的点,按“同前”就可以测接下来的坐标点。这时如果镜高与之前有所变动,再输入镜高,后按“同前”就可以测到其它点了。……如果镜高与之前一致,直接按同前。 这样就完成了整个数据采集。1)水平角测量 (1)按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。 (2)设置A方向的水平度盘读数为0°00′00″。 (3)照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。 2)距离测量 (1)设置棱镜常数 测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。 (2)设置大气改正值或气温、气压值 光在大气中的传播速度会随大气的温度和气压而变化,15℃和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。实测
全站仪测量坐标步骤
全站仪测量坐标步骤 LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】
全站仪测量坐标步骤 仪器对中整平,开机进入主菜单,进入放样程序: 一:站点在已知点上:然后开始建站,先输入站点坐标,然后根据提示输入后视点坐标,把仪器对准后视点,然后按测距,测好后站就建好了,这时候要反侧下后视点,看测量出的后视点坐标和你输入的坐标差多少,如在允许范围内,就可以进行下一步放样,如不在,则需要找出原因,原因来自三个方面:仪器问题、人问题、点坐标问题。在解决好后可以进入下一步饭放样了,根据仪器提示,输入放样点坐标,输入后一般仪器会显示角度距离。这表示你输入的数据仪器,算出要放样的点和站点的关系,不用管它,然后按极差按钮或下一步之类的按键,会进入到一个水平角,会不断变换的界面,把仪器转到水平角数据显示为“度”“分”“秒”附近,然后用水平微动把仪器调到“度”“分”“秒”这表示要放样的点在这条线上。在仪器前方,另一人棱镜对准仪器,测量一下,会显示比如-30m或30m表示你所要放的点要前进或后退30m,不同于正负号,表示前进或后退不同,持棱镜人就按照操作仪器人的提示前进或后退。在测量数据位正负10公分的时候就可以打桩了,然后在桩上钉钉,继续定位,这点就好了。 二:仪器架在未知点上,那就是在操作第一种情况前加上后方交会程序就行了,仪器进入后方交会程序后,先输入已知点A坐标,然后测A 点测距,后输入B点坐标,然后照准B点测距,然后计算可以算出站点坐
标,算出站点坐标后就又回到上面第一种情况,继续按照“一”的提示操作就行。 全转仪测量坐标不管哪种情况请注意一点: 长边必须控制短边,即站点与后视点的距离要大于站点与放样点的距离。
全站仪高程测量新方法
全站仪高程测量新方法 [导读]:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。 摘要:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时毎次测量时还不必量取仪器高、棱镜高。该法使三角高程测量精度进一步提高,施测进度更快。 关键词:全站仪测量三角高程新方法 1引言 在长江下游丘陵地区测量过程中,全站仪测量技术被广泛应用,全站仪三角高程测量也得到普遍应用。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是校高的,但水准测量受地起伏的限制,外业工作量大,施测速度校慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度校快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度校低,且每次测量都得量取仪器高、棱镜高,比校繁锁,而且增加了误差来源。随着全站仪的广泛使用,使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已径显示出了局限性。我们经过长期实践和摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。该方法使三角高程测量精度进一并提高,施测速度更快。 2三角高程测量的传统方法 设A、B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。 D为A、B两点间的水平距离;α为在A点观测,B点时的垂直角;i为测站点的仪器高;t为棱镜高;HA 为A点高程,HB为B点高程V为全站仪望远镜和棱镜之间的高差(V=Dtanα); 首先我们假设A、B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影。为了确定高差HAB,可在A点架设全站仪、在B点竖立棱镜,观测垂直角α,并直接量取仪器高i和棱镜高t,若A、B两点间的水平距离为D,则HAB=V+i-t,故 HB=HA+Dtanα+i-t(1) 这就是三角高程测量基本公式,但它是以水平面为基准和视线成直线为前提的。因此,只有当A、B两点间的距离很短时,才比较准确。当A、B两点距离较远时,就必须考虑地球弯曲和大气折光的影响。这里不叙述如何进行球差和气差的改正,只就三角高程测量新方法的一般原理进行闸述。从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:a全站仪必须架设在已知高程点上;b要测出待测点的高程,必须量取仪器高和棱镜高。 3三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上同时又,在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图所示,假设B点的高程为已知,A点的高程为未知,这里要通过全站仪测定其他待测点的高程。首先由式(1)可知:HA=HB-(Dtanα+i-t)(2) 上式除了Dtanα即V的值可以用仪器直接测出外,i、t都是未知的。但有一点可以确定,即仪器一旦置好,i值也将随之不变,同时选取棱镜作为反射,假定t值也固定不变。从式(2)可知: HA+i-t=HB-Dtanα=W(3) 由式(3)可知,基于上面的假设,HA+i-t在任一测站上也是固定不变的,而且可以计算出它的值W。 这一新方法的操作过程如下: a、仪器任意置点,但所选点位要求能和已知高程点通视。 b、用仪器照准已知高程点,测出V的值,并算出W的值(此时与仪器高程测定有关的常数如测站点高程、仪器高、棱镜高均为任意什值。施测前不必设定)。 c、将仪器测站点高程重新设定为W、仪器高和棱镜高设为0即可。 d、照准待测点测出其高程。
全站仪测高差
使用全站仪快速测量巷道高差的方法求算待定点的高程时,只要测定两点间的高差,根据一个已知点高程,就可以推算出待定点的高程,这一测量过程称为高程测量。高程测量的实质就是高差测量。高程测量的常用方法有水准测量和三角高程测量。水准测量是利用水准尺配合水准仪提供水平视线来测定两点间高差的方法。水准测量具有较高的精度,因此是高程测量中最主要的方法。 一、水准测量原理 如下图所示,已知高程点A的高程为H A,欲求待定点B的高程H B。当两点相距较近时,在A、B两点中间安置一台水准仪,在A、B两点分别铅直竖立底部为零的水准尺,利用水准仪提供的水平视线在两尺上分别读得视线截尺读数a和b,由下图可知A、B两点间的高差为: h AB=a-b 则B点的高程为H B=H A+h AB a—已知高程点A上的水准尺读数,称为后视读数; b—待求高程点B上的水准尺读数,称为前视读数; A—为已知点,称为后视点;
B—为待测高程点,称为前视点。 用文字表示,高差=后视读数-前视读数。高差计算规定是后视读数减前视读数,为此高差有正负之分,高差为正(a>b时),即前视读数小,表示前视点比后视点高;高差为负(a<b时),即前视读数大,表示前视点比后视点低。 — 以上安置一次仪器测定两点高差的施测过程称为水准测量的基本 原理。 二、高程计算方法 测量工作中,根据不同的需要,高程的计算一般有两种方法,高差法和视线高法 1、高差法 利用两点间的高差计算未知点高程的方法,称为高差法。从上图中可以得出计算公式:H B=H A+h AB 或H B = H A +(a-b) 2、视线高法也称仪高法 当安置一次仪器,根据一个后视点的高程,需要测定多个前视点的高程时,利用仪器高程来计算多个未知点高程的方法,称为视线高法,也称为仪器高法。从上图中可以得出各未知点高程的计算公式为:视线高程:H i=H A+a B点高程:H B=H i-b 用文字表示,前视点高程等于仪高减去前视读数。仪高法是计算次仪高,就可以简便地测算几个前视点的高程。因此,当安置一次仪器时,同时需要测出数个前视点的高程时,使用仪高法是比较简便的。 三、水准仪测高差的缺点
全站仪坐标测量方法步骤
全站仪坐标测量方法步骤 1、架设仪器,对中、调平。 2、按“菜单(MENU )”键,后显示“数据采集”,按“F1”后,出现选择文件,按“F1”输入“文件名”后按“回车”。 3、按“ F1' ”测站点输入,输入点号、仪器高后,显示测站,再按“测站”后出现坐标输入,输入坐标后按回车键,出现“记录” ,此时有个选择对话框,“是” 与“否”,这时按“是”以保存,完成整个测站点的输入。 4、显示菜单里有个“后视” ,按F2 键输入点号棱镜镜高,按“后视---F4 键” 显示“AE/AZ ”按“F3”键输入坐标,坐标输入完成后,出现“后视点号与镜高” 对准后视棱镜,按测量,显示“斜距”与“坐标” ,按坐标镜后就可以进行坐标测量。测量完毕后按“是”以保存。保存后显示菜单下有个“前视” ,按“前视”输入“棱镜高”后按测量,就可以测到“前视点的坐标” 。如果接下来还要测其它的点,按“同前”就可以测接下来的坐标点。这时如果镜高与之前有所变动,再输入镜高,后按“同前”就可以测到其它点了。……如果镜高与之前一致,直接按同前。 这样就完成了整个数据采集。1)水平角测量 ( 1 )按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。 (2)设置A方向的水平度盘读数为0° 00’ 00〃。 (3 )照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。2)距离测量( 1 )设置棱镜常数测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。( 2)设置大气改正值或气温、气压值 光在大气中的传播速度会随大气的温度和气压而变化,15C和760mmH是仪器设置 的一个标准值,此时的大气改正为0ppm实测时,可输入温度和气压值,全站仪 会自动计算大气改正值(也可直接输入大气改正值) ,并对测距结果进行改正。 ( 3)量仪器高、棱镜高并输入全站仪。 ( 4)距离测量 照准目标棱镜中心,按测距键,距离测量开始,测距完成时显示斜距、平距、高差。全站仪的测距模式有精测模式、跟踪模式、粗测模式三种。精测模式是最常用的测距模式,测量时间约2.5S,最小显示单位1mm跟踪模式,常用于跟踪移动目标或放样时连续测距,最小显示一般为1cm,每次测距时间约0.3S ;粗测模式,测量时间约0.7S,最小显示单位1cm或1mm在距离测量或坐标测量时,可按测距模式 (MOD)键选择不同的测距模式。应注意,有些型号的全站仪在距离测量时不能设定仪器高和棱镜高,显示的高差值是全站仪横轴中心与棱镜中心的高差。
全站仪三角高程测量方案优化设计
全站仪三角高程测量方案优化设计 论文:应用全站仪进行三角高程测量的新方法_建筑设计 关键字:全站仪三角高程测量新方法发布时间:08-29 10:54 应用全站仪进行三角高程测量的新方法 张英杰 摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 关键词:全站仪三角高程测量新方法 1引言 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。广泛应用,但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 2 三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+ hAB得到B点的高程HB。
图一 图中: D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtan а) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t 故 HB=HA+ Dtanа+ i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 3 三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: HA=HB-(Dtanа+i-t) (2)
全站仪操作步骤
全站仪操作步骤 全站仪简介: 仪器面板外观和功能说明 面板上按键功能如下: ——进入坐标测量模式键, ——进入距离测量模式键, ANG ——进入角度测量模式键, MENU ——进入主菜单测量模式键, ESC ——用于中断正在进行的操作,退回到上一级菜单, POWER ——电源开关键, ——光标左右移动键, ▲ ▼ ——光标上下移动、翻屏键, F1 、F2 、F3 、F4 ——软功能键,其功能分别对应显示屏上相应位置显示的命令, 1---9 代表数字字母键,其功能分别对应输入数字与其下面所对应的字母。显示屏上显示符号的含义:V ——竖盘读数;HR ——水平读盘读数(右向计数);HL ——水平读盘读数(左向计数); HD ——水平距离;VD ——仪器望远镜至棱镜间高差;SD ——斜距;* ——正在测距; N ——北坐标,x ;E ——东坐标,y ;Z ——天顶方向坐标,高程H 。 测站点:仪器对中器对准的点就是测站点。(例图B:测站点C) 后视点:仪器用来确定现场北方向的点就是后视点。(例图B,已知点A,当用全站仪望远 镜瞄准A点后,就是确定了仪器所对的北方向为N1方向。) 放样点:只知道图纸上坐标,而不知道现场位置,需要把坐标所对应的位置在现场标定出来 的点就是放样点。(例图B,放样点P1) 全站仪坐标表示跟图纸坐标对应关系:N(北坐标)一X, E (东坐标)--Y,Z (天顶方向 坐标)—标高。 测站点和后视点必须满足的条件:知道两个点的现场位置和坐标,两点之间必须相互看得见。 全站仪的两个最基本的功能:放样和数据采集。 放样:已知现场两个点的位置和坐标:把知道坐标而不知道现场位置的点在现场的位置标定 出来的工作就是放样。{如图B所示,我们已知点A和点C两点在现场的位置和坐标,还知道P1点的坐标,我们可以通过在C点架设全站仪作为测站点,在A点放置棱镜作为后视点,瞄准A点后,把在全站仪上把角度差dHR调为零,再指挥跑棱镜者在C到P1的连接线上前后移动,直到距离差dHD为零时,棱镜杆尖所对的点即是放样点P1的现场位置。} 放样的具体操作步骤:(以南方测绘NTS-302系列为例) 1、在测站点上安置仪器,对中、整平。 2、按电源键开机。屏幕显示垂直角过零。 3、转动望远镜,屏幕显示V, HR,进入角度测量界面。 4、按键,进入放样程序,屏幕提示:选择一个文件。 5、按F3 选择跳过,屏幕进入坐标放样1/2 菜单。 6、按F1 选择输入测站点,屏幕显示测站点。 7、按F3选择坐标,屏幕进入测站点的N,E,Z坐标输入界面。
全站仪坐标测量模式的操作步骤
全站仪坐标放样的操作步骤 悬赏分:0 - 提问时间2010-7-8 11:44 在已坐标两点输入后发觉与图中位子不对 提问者:龙方兵- 一级 其他回答共1 条 尼康DTM-302系列全站仪操作流程 中翰整理 将仪器架设在测站点上,整平对中后按<PWR>电源键开机,并上下摇动望远镜对竖角进行初始化,出现EMS基本测量屏。 翻页可显示内容: HA――(Horizontal Angle)水平角SD――(Slope Dis tance)斜距 VA――(vertical Angle)竖直角VD――(vertical Distance)高差 HL――盘左角HD――(Horizontal Distance)平距V%――坡度 X、Y、Z――三维坐标 按键功能PWR――(Power)电源开关键 MSR――(Measure)测距DSP――(Display)显示内容切换 TRK――(Track)跟踪测量ANG――(Angle)角度设置 HOT――参数设置热键MODE――模式切换键 RDM――(Remote Distance Measure)对边测量键 REM――(Remote Elevation Measure)悬高测量 STN――(Station)设置测站S-O――(Stake Out)放样测量 LG――导向红光开关切换REC――( Record)记录数据 ENT――( Enter)操作确认键MENU――(Menu)菜单设置键 ――箭头键,在不同的工作模式下,有相应不同的功能 ――面板、十字丝照明、导向红光开关、按键提示声音设置 以下介绍仪器的基本操作流程。 1、工程文件名设定 开机后初始化后,出现图-1时,按菜单设置键<MENU>出现 按数字键,选择(或按箭头键,将反黑光标移到图-2所示位置,按键),出现 按键输入拼音字母或数字,比如输字母A,按一下键,输入字母B,连续快速按二下该键,输入字母C连续快速按三下撰键,如果要输数字,先按 下键,再按一下该键。其它字母或数字输入与此同。默认用工程名或日期作文件名,输完后按键,出现
全站仪测标高
很多朋友熟练使用全站仪,但是对全站仪测标高有点迷糊;下面我就我的一些经验作如下总结: 1、量仪器高;就是在设站的时候量取仪器高,输入仪器高,菱镜高即可,量仪器高的时候是从已知高程控制点量到仪器中心的距离,并不是地面到仪器中心的距离。这种方法不建议使用,如果对标高要求不高的话可以使用。 2、测高差;如果对坐标没有要求,只需要测出高程,那不需要架设在控制点上,随便找个位置整平即可,先在已知高程点上测一下,仪器会显示出X Y Z,X 和Y不管,只看Z。记下Z的数据,然后再拿去待测点测一下,同理记下Z的数据。求出这两个数据的差值就可以算出待测点的高程,比如;已知高程42米,在已知点的读数5.263,待测点的读数4.263。那待测点的高程就是41米。有时候仪器会显示负的读数,没关系,同理即可!需要记住的是菱镜高不能变动。这种方法的使用原来跟水准仪一样了。测量精度较高,推进使用。 3、改变仪器高;如果你有已知高程点32米,那你就把仪器高设置32左右,随便设,把菱镜立在已知高程点上,测一下,如果仪器显示比已知高程点高了,你
就把仪器高改一下。举例说明;已知高程点35.5米,仪器整平,进入测量界面,输入仪器高36米(有的仪器在测量界面就可以直接输入,有的要在后视界面设置),菱镜高输入1.2米(一般是1.2米,随便输入也可以)。然后把菱镜立在已知高程点上测一下,仪器显示34.8米,说明比已知高程低了.7米,那就把 仪器高升高0.7米,改为36.7米,在测一下,仪器显示35.5米,那说明测量对了(如果不对,那还得试一下。反正总可以弄到和已知高程点一样的,摸索摸索!),想测什么就测什么了。这种方法也很好用,各种仪器的操作方法不同,大家摸索一下。推进使用。 最后说明一下,全站仪测量高程的精度没有水准仪高,因为仪器瞄准的时候是尽可能的瞄准菱镜中心,如果上下移动一点对高程都有影响。测量距离远的话更是不准。大概是2CM左右。建议大家不在迫不得已的时候不要使用全站仪测量精度要求高的点。打的手疼了,喜欢的顶一下。 很多朋友熟练使用全站仪,但是对全站仪测标高有点迷糊;下面我就我的一些经验作如下总结:
全站仪测量高程到底有几种方法
全站仪测量高程到底有几种方法。 方法一:经典方法,全站仪在已知坐标(含高程)点上设站; 方法二:后方交会,全站仪在任意点上设站; 方法三:对边测量,全站仪测两点高差。 下面对三种方法进行阐述: 方法一:经典方法 先说方法一。说这个方法是经典方法,是因为: 1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述; 3.全站仪高程测量的相关设置,都按此原理进行的。 到底什么测量原理呢,我们来回顾一下,看下图: 我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出: 全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值 这个结论我们先记住,它将是后面方法二和方法三的理论基础。 方法二:后方交会 说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。 而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。 我们还是继续对照着这张老图进行分析: 方法三:对边测量 方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。其测量原理,在方法一中已经验证,在此不再赘述。 各种方法的适用情况: 方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。因此最后来谈谈各种方法的优势和不足,以及它们的适用情况。