使用通用平板电脑的安全示教器和示教方法与设计方案
图片简介:
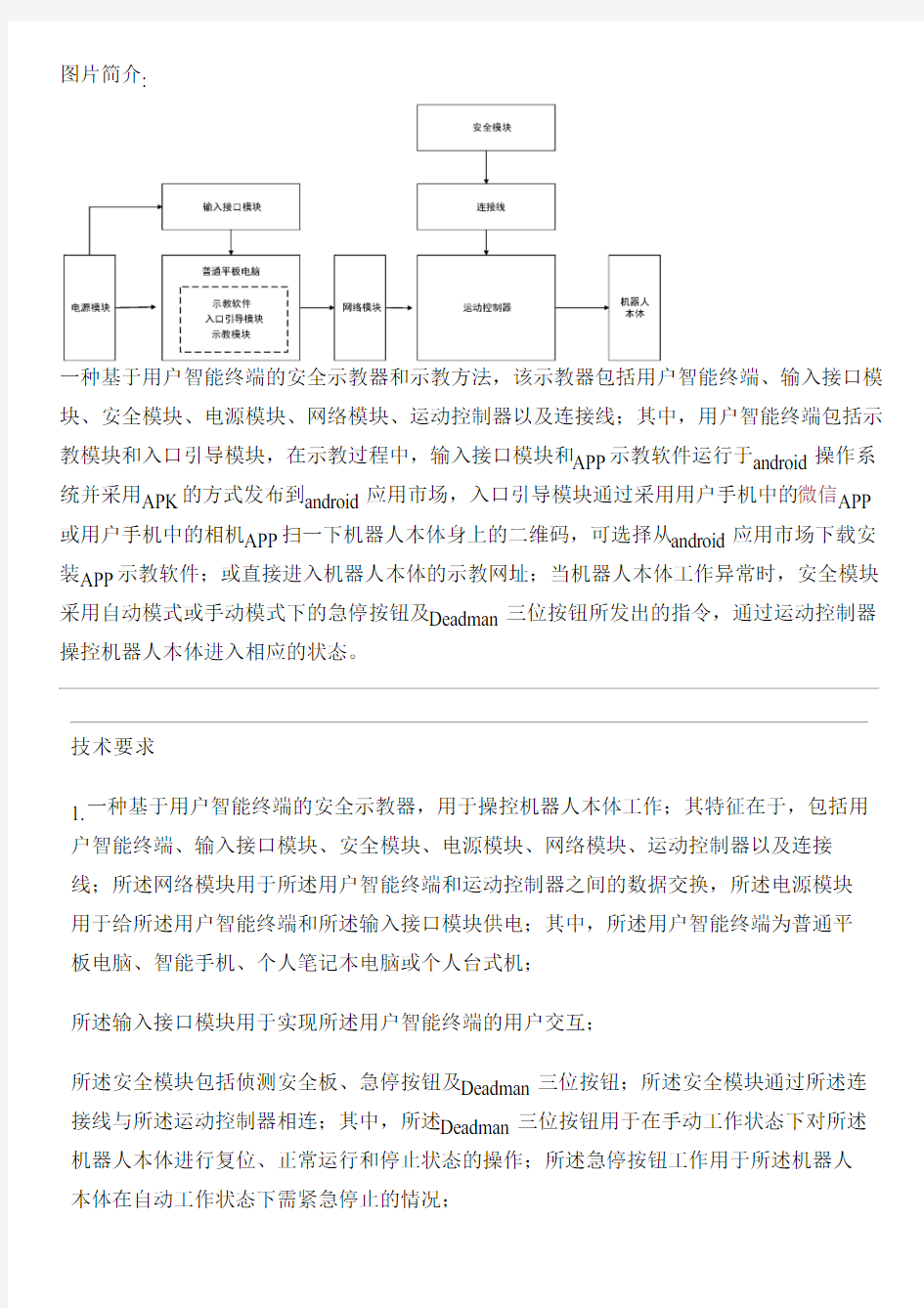
一种基于用户智能终端的安全示教器和示教方法,该示教器包括用户智能终端、输入接口模块、安全模块、电源模块、网络模块、运动控制器以及连接线;其中,用户智能终端包括示教模块和入口引导模块,在示教过程中,输入接口模块和APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场,入口引导模块通过采用用户手机中的微信APP 或用户手机中的相机APP扫一下机器人本体身上的二维码,可选择从android应用市场下载安装APP示教软件;或直接进入机器人本体的示教网址;当机器人本体工作异常时,安全模块采用自动模式或手动模式下的急停按钮及Deadman三位按钮所发出的指令,通过运动控制器操控机器人本体进入相应的状态。
技术要求
1.一种基于用户智能终端的安全示教器,用于操控机器人本体工作;其特征在于,包括用户智能终端、输入接口模块、安全模块、电源模块、网络模块、运动控制器以及连接
线;所述网络模块用于所述用户智能终端和运动控制器之间的数据交换,所述电源模块
用于给所述用户智能终端和所述输入接口模块供电;其中,所述用户智能终端为普通平
板电脑、智能手机、个人笔记本电脑或个人台式机;
所述输入接口模块用于实现所述用户智能终端的用户交互;
所述安全模块包括侦测安全板、急停按钮及Deadman三位按钮;所述安全模块通过所述连接线与所述运动控制器相连;其中,所述Deadman三位按钮用于在手动工作状态下对所述机器人本体进行复位、正常运行和停止状态的操作;所述急停按钮工作用于所述机器人
本体在自动工作状态下需紧急停止的情况;
所述用户智能终端包括示教模块和入口引导模块,所述示教模块根据所述输入接口模块的指令将示教软件传送到所述运动控制器,所述入口引导模块通过所述普通平板电脑或智能手机中的微信APP或所述普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;所述个人笔记本电脑或个人台式机通过所述输入接口模块启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作。
2.根据权利要求1所述的基于用户智能终端的安全示教器,其特征在于,还包括套壳,所述用户智能终端固定嵌入安装平板套壳的凹槽中,所述电源模块、所述网络模块、所述安全模块和输入接口模块分别预置于所述套壳内部。
3.根据权利要求1所述的基于用户智能终端的安全示教器,其特征在于,所述示教模块采用的技术栈为:Android+Java+Web Container+HTML5+CSS+JAVASCRIPT(TYPESCRIPT)。
4.根据权利要求3所述的基于用户智能终端的安全示教器,其特征在于,所述示教软件为APP示教软件,所述APP示教软件运行于android操作系统并采用APK的方式发布到android 应用市场,并且,所述APP示教软件从android应用市场下载安装。
5.根据权利要求3所述的基于用户智能终端的安全示教器,其特征在于,所述示教软件设置于传统示教器上或示教网址上,所述示教模块根据所述输入接口模块的指令将所述传统示教器上或所述示教网址链接的所述示教软件植入到所述用户智能终端,进而传送到所述运动控制器。
6.根据权利要求1所述的基于用户智能终端的安全示教器,其特征在于,所述输入接口模块为所述用户智能终端的交互单元、通过USB接口或蓝牙与所述用户智能终端相连的外部接入的键盘、方向键、各轴的操控按键、手柄和/或鼠标、以及使用所述示教软件虚拟出来的示教按钮。
7.根据权利要求1所述的基于用户智能终端的安全示教器,其特征在于,用于所述用户智能终端和运动控制器之间的数据交换的所述网络模块使用Web Socket方式。
8.根据权利要求1所述的基于用户智能终端的安全示教器,其特征在于,
所述安全模块包括侦测安全板、急停按钮及Deadman三位按钮;所述安全模块通过所述连接线与所述运动控制器相连;其中,所述Deadman三位按钮对应于所述机器人本体复位、正常运行和停止状态;所述急停按钮工作于自动状态。
9.一种如权利要求1所述基于用户智能终端的安全示教器的示教方法,其特征在于,包括如下:
步骤S1:采用Android APP、IOS APP和/或Web技术开发示教软件,并存储在所述用户智能终端或传统示教器中;
步骤S2:根据所述输入接口模块的指令将示教软件传送到所述运动控制器,并设置所述示教软件的运行模式,所述运行模式为自动模式或手动模式;
步骤S3:通过所述普通平板电脑或智能手机中的微信APP或所述普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;所述个人笔记本电脑或个人台式机通过所述输入接口模块启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;
步骤S4:所述侦测安全板检测所述机器人本体工作异常时,接收所述自动模式或手动模式下的急停按钮及Deadman三位按钮所发出的指令,通过所述运动控制器操控所述机器人本体进入相应的状态。
10.根据权利要求9所述示教方法,其特征在于,所述步骤S1具体包括:所述APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场;所述APP示教软件直接从android应用市场下载安装。
技术说明书
一种使用通用平板电脑的安全示教器和示教方法
技术领域
本技术涉及智能机器人操控领域,尤其一种使用通用平板电脑的安全示教器和示教方法。
背景技术
随着经济的发展和科技的进步,社会已进入了信息化时代,多媒体技术与网络技术的结合从根本上改变了信息的传播方式。机器人本体的出现为制造业的发展带来了很多的好处。操作者通过机器人示教器与机器人运控系统控制机器人本体进行运动、配置和监控等。
目前,大多数厂商所使用的机器人示教器都要定制开发软硬件平台,也就是说,厂商需要从头开发电脑主板、显示模块、输入接口模块和安全模块等硬件,并移植定制操作系统,开发示教软件等工作。
上述开发方式虽然保证了安全性,但开发工作量巨大且周期长,其需要经过多次迭代才能使软硬件的设计优化达到比较好的水平。然而,由于工业市场机器人的市场规模相对狭小,使得研发制造成本平摊到每台机器人本体上的单位成本相对较高。
具体地,传统TP软件开发技术栈方案一般为:Windows CE+.NET Framework+CSharp方案或者Linux+QT+C Plus Plus方案。也就是说,上述两种方案只能针对某个具体的平台进行代码编写,无法做到一套代码既能够在Windows版的TP上运行,又能够在Linux版的TP上运行。即此方案需在确定了硬件平台和操作系统的基础上进行编码,其代码是与平台紧密耦合的,代码通用性不高。如果选用了x86的CPU来做TP,则不能后面又选用ARM CPU 来做TP。这样的话,平台技术路径是被限制的,一旦选定了x86平台,则后面即使发现缺陷,也很难切换到ARM平台上来。同样,一旦选定了ARM平台,也很难切换到X86平台。此种技术方案会产生很强的路径依赖,一旦方案确定,随着平台依赖的代码越来越多,切换平台的成本会越来越高。
此外,由于工业市场机器人的市场规模相对狭小,这也会直接导致市场反馈的速度远不如消费电子,从而使工业市场机器人的更新换代缓慢。示教器的性能往往与同时代的消费电子有1~2代的代差,因此,很多最新的人机交互技术无法同步应用到示教器上。
例如,现在广泛应用于消费电子的Android和Web技术对计算性能要求很高。如果使用1~2代前的技术来设计示教器,对于已习惯了消费电子的用户,会有倒退到历史的感觉,立马会对示教器产品的评价降低很多。
如果使用平板电脑作为机器人示教器的话,借助于消费电子的巨大市场,有成本低廉,更新迭代快,性能强劲的优点,可以使用最新的人机交互技术来做开发。但因缺少安全模块,无硬实时的急停按钮,Deadman等安全装置,对于高速运动的机器人,安全性往往得不到保证。
技术内容
为了克服以上问题,本技术提供一种使用通用平板电脑的安全示教器和示教方法,其利用消费类的平板电脑作为计算模块,然后安装到专用的卡套内,组合而成一个安全示教器,实现了提供完整的示教功能。
为实现上述目的,本技术的技术方案如下:
本技术提供一种基于用户智能终端的安全示教器,包括用户智能终端、输入接口模块、安全模块、电源模块、网络模块、运动控制器以及连接线;所述网络模块用于所述用户智能终端和运动控制器之间的数据交换,所述电源模块用于给所述用户智能终端和所述输入接口模块供电;其中,所述用户智能终端为普通平板电脑、智能手机、个人笔记本电脑或个人台式机;
所述输入接口模块用于实现所述用户智能终端的用户交互;
所述安全模块包括侦测安全板、急停按钮及Deadman三位按钮;所述安全模块通过所述连接线与所述运动控制器相连;其中,所述Deadman三位按钮用于在手动工作状态下对所述机器人本体进行复位、正常运行和停止状态的操作;所述急停按钮工作用于所述机器人本体在自动工作状态下需紧急停止的情况;
所述用户智能终端包括示教模块和入口引导模块,所述示教模块根据所述输入接口模块的指令将示教软件传送到所述运动控制器,所述入口引导模块通过所述普通平板电脑或智能手机中的微信APP或所述普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;所述个人笔记本电脑或个人台式机通过所述输入接口模块启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作。
优选地,所述的基于用户智能终端的安全示教器,还包括套壳,所述用户智能终端固定嵌入安装平板套壳的凹槽中,所述电源模块、所述网络模块、所述安全模块和输入接口模块分别预置于所述套壳内部。
优选地,所述示教模块采用的技术栈为:Android+Java+Web
Container+HTML5+CSS+JAVASCRIPT(TYPESCRIPT)。
优选地,所述示教软件为APP示教软件,所述APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场,并且,所述APP示教软件从android应用市场下载安装。
优选地,所述示教软件设置于传统示教器上或示教网址上,所述示教模块根据所述输入接口模块的指令将所述传统示教器上或所述示教网址链接的所述示教软件植入到所述用户智能终端,进而传送到所述运动控制器。
优选地,所述输入接口模块为所述用户智能终端的交互单元、通过USB接口或蓝牙与所述用户智能终端相连的外部接入的键盘、方向键、各轴的操控按键、手柄和/或鼠标、以及使用所述示教软件虚拟出来的示教按钮。
优选地,用于所述用户智能终端和运动控制器之间的数据交换的所述网络模块使用Web Socket方式。
优选地,所述安全模块包括侦测安全板、急停按钮及Deadman三位按钮;所述安全模块通过所述连接线与所述运动控制器相连;其中,所述Deadman三位按钮对应于所述机器人本体复位、正常运行和停止状态;所述急停按钮工作于自动状态,
为实现上述目的,本技术还提供一种技术方案如下:
一种如上述基于用户智能终端的安全示教器的示教方法,其包括如下:
步骤S1:采用Android APP、IOS APP和/或Web技术开发示教软件,并存储在所述用户智能终端或传统示教器中;
步骤S2:根据所述输入接口模块的指令将示教软件传送到所述运动控制器,并设置所述示教软件的运行模式,所述运行模式为自动模式或手动模式;
步骤S3:通过所述普通平板电脑或智能手机中的微信APP或所述普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;所述个人笔记本电脑或个人台式机通过所述输入接口模块启动所述示教软件,并通过所述运动控制器操控所述机器人本体工作;
步骤S4:所述侦测安全板检测所述机器人本体工作异常时,接收所述自动模式或手动模式下的急停按钮及Deadman三位按钮所发出的指令,通过所述运动控制器操控所述机器人本体进入相应的状态。
优选地,所述APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场;所述APP示教软件直接从android应用市场下载安装。
从上述技术方案可以看出,本技术提供的基于用户智能终端的安全示教器和示教方法,其利用市面上通用平板结合示教器套壳,提供了与传统定制开发的示教器无差别的功能,但成本却低很多。即传统方式开发的示教器成本,一般位于4000~40000元人民币之间,而采用本技术开发的示教器,成本往往处于2000~4000元之间,且升级换代方便,软件开发便捷,因采用与消费电子类似的技术,社会上掌握了此开发技术的软件工程师也多,也给开发降低了人力资源上的风险。
附图说明
图1为本技术基于用户智能终端的安全示教器的结构示意图
图2为本技术基于用户智能终端的安全示教器正面平面布局示意图
图3为本技术基于用户智能终端的安全示教器背面平面布局示意图
具体实施方式
体现本技术特征与优点的实施例将在后段的说明中详细叙述。应理解的是本技术能够在不同的示例上具有各种的变化,其皆不脱离本技术的范围,且其中的说明及图示在本质上当作说明之用,而非用以限制本技术。
以下结合附图1-2,通过具体实施例对本技术的基于用户智能终端的安全示教器及其使用方法作进一步详细说明。
请参阅图1,图1为本技术基于用户智能终端的安全示教器示意图。如图1所示,该基于用户智能终端的安全示教器,包括安装平板,包括用户智能终端、输入接口模块、安全模块、电源模块、网络模块、运动控制器以及连接线;网络模块用于用户智能终端和运动控制器之间的数据交换,电源模块用于给用户智能终端和输入接口模块供电。
在本技术的实施例中,用户智能终端可以为普通平板电脑、个人笔记本电脑或个人台式机;例如,选用消费级平板电脑借助于消费电子的巨大市场,有成本低廉,更新迭代快,性能强劲,响应速度快,触屏调校好,做工精致,人机交互方式先进等诸多优点。并且,使用消费级平板电脑作为机器人示教器的计算、显示和触屏输入接口模块,可以使用最新的人机交互技术来做开发,即能让机器人本体用户也享有上述优势。
为了整合设备需要,在本技术的实施例中,还可以包括套壳,用户智能终端固定嵌入安装平板套壳的凹槽中,电源模块、网络模块、安全模块和输入接口模块分别预置于套壳内部。具体操作方式如下,从市面上购买符合规格的消费级平板电脑,依照此款平板电脑的尺寸,使用3D打印技术将套壳凹槽打印好,将此平板电脑、电源模块,网络模块,输入接口模块与平板电脑嵌入于安装平板套壳的凹槽中,并固定防止脱落。
并且,将安装平板套壳中的电源模块、网络模块、输入接口模块与平板电脑连接好,即可组成一个全功能的安全示教器,以替代传统示教器使用。该示教器应用在6轴和4轴机器人本体产品上,可以取得良好效果。
在本技术的实施例中,用户智能终端包括示教模块和入口引导模块,示教模块根据输入接口模块的指令将示教软件传送到运动控制器,入口引导模块通过普通平板电脑或智能手机中的微信APP或普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,将启动示教软件,并通过运动控制器操控机器人本体工作;个人笔记本电脑或个人台式机通过输入接口模块启动示教软件,并通过运动控制器操控机器人本体工作。
也就是说,入口引导模块用于让手机和平板电脑等智能终端快速的与机器人本体建立起连接,并快速访问机器人的操控界面,是无需经过繁杂配置的,每台机器人本体的二维码都是唯一的,入口引导模块能够根据这些信息自动的判别要连接的机器人本体。
较佳地,示教模块可以采用的技术栈为:Android+Java+Web
Container+HTML5+CSS+JAVASCRIPT(TYPESCRIPT)。例如,示教软件为APP示教软件,APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场,并且,APP示教软件从android应用市场下载安装。当然,在本技术的实施例中,示教软件也可设置于传统示教器上或示教网址上,示教模块根据输入接口模块的指令将传统示教器上或示教网址链接的示教软件植入到用户智能终端,进而传送到运动控制器。
在本技术的实施例中,输入接口模块为用户智能终端的交互单元、通过USB接口或蓝牙与用户智能终端相连的外部接入的键盘、方向键、各轴的操控按键、手柄和/或鼠标、以及使用示教软件虚拟出来的示教按钮。
也就是说,由于机器人本体的特性,使用普通用户智能终端键盘无法提供很好的体验,输入接口模块可以根据机器人本体的空间运动特性,定义三维空间的坐标系按键和各个电机的控制按键,并将用户的按键信息加以处理,变换为机器人的运动指令。输入接口模块提供各种功能按钮的模块,比如,方向键、各轴的操控按键和手柄,可用来方便的操控机器人。通常,输入接口模块通过USB接口或蓝牙与平板电脑连接,并且,通过平板电脑软件操作系统里专有的设备驱动文件,可被识别为键盘、鼠标、摇杆等输入设备。
在本技术的一些实施例中,输入接口模块是可拆卸的,也可以不将此模块接入平板电脑。拆卸后,用户可以使用示教软件虚拟出来的示教按钮来操控机器人,这对于现在快速发展的人机协助机器人非常合适。也就是说,配套的示教程序可同时支持内部虚拟按键及外部物理输入设备。
输入接口模块采用用户智能终端中的Web浏览器输入机器人示教的网址或APP调用示教模块进入到机器人的示教操控界面,并通过运动控制器操控机器人本体工作。
电源模块用于给用户智能终端和输入接口模块供电,电源模块通常可以是DC-DC的电源转换器。电源转换器可以将从连接线输入的直流电(通常为24v或12v)转换为内部模块所需的直流电。例如,平板电脑所需的电源一般是5v直流电,通过USB接口进行供电。输入接口模块所需的电源一般也是5v。而急停按钮,Deadman一般使用12v直流电。此外,电源模块还可以就能够将输入的电压,转换为内部模块所需的各种电压。
在本技术的实施例中,网络模块可以提供有线以太网连接,示教器通过此有线以太网联入运动控制器网络进行通讯。此网络模块是可选的,如果不使用此网络模块,也可以使用平板自带的wifi连接入控制器网络。
安全模块包括侦测安全板、急停按钮及Deadman三位按钮;安全模块通过连接线与运动控制器相连;其中,Deadman三位按钮对应于机器人本体复位、正常运行和停止状态;急停按钮工作于自动状态。
在本技术的实施例中,安全模块并不与平板电脑直接相连,而是通过某种通讯方式如RS232,RS485等与控制柜内的安全控制板直接相连。
在本技术的实施例中,Deadman三位按钮可以是带弹性的三段式安全开关。第一段默认为复位状态;当用适中的力道按下,会处于第二段;当用力过大,则会处于第三段。当控制柜内的安全控制板侦测到开关处于第二段,则允许机器人本体运动;处于第一和第三段均不允许机器人运行。
在手动模式下,用户必须用一只手用适中的力道按住Deadman三位按钮,让其处于第二段。然后,另外一只手按示教按钮,则机器人本体会则示教指令移动。当发生危险导致用户紧张情况下,松开按钮(处于第一段),或用力过猛(处于第三段),则安全控制板会立即将机器人的电机停止运动,防止发生危险。
在自动模式下,机器人本体会忽略Deadman三位按钮的状态,即机器人本体按编辑好的程序运行。当有危险,需要立即停止机器人本体运行时,用户可以拍下急停按钮,让机器人立即停止运动,从而保证安全。
在本技术的实施例中,与运动控制器的连接线是多束的,包括电源线、Deadman和急停信号线、网线和预留线束。电源线用来从运动控制器取电,一般是24v直流电;Deadman和急停信号线让这些安全信号直接接入运动控制器;网线支持以太网,平板电脑可以通过此网线连接至运动控制器,此网线是可选的。平板电脑也可以通过无线WIFI的方式连接入控制器;预留线束为以后扩展使用。
通常,示教模块可以采用Android APP、IOS APP和/或Web技术开发;示教软件可以使用一般消费者非常熟悉的Android APP、IOS APP或Web技术进行开发,进而可以提高用户体验,提高对产品的认可度。
在应用分发方面,也跟传统的机器人不一样。传统机器人使用的是传统的安装包安装方式进行。而本示教器使用android系统,可以采用APK的方式进行发布,并且可以发布到应用市场,安装非常方便。
在本技术的实施例中,本示教器与控制器通讯方式也有很大的改进。传统示教器与控制器通讯一般使用Socket的方式进行。本技术使用Web Socket方式进行,其意味着该示教软件客户端可以直接使用最新一代的HTML及Web技术进行开发,可以直接运行在浏览器内,也可以运行在定制化的Web容器APP中,从而实现打破运行平台的限制,即示教软件客户端是可以同时运行在平板电脑上,传统示教器和PC机上的。此种跨平台方式同时兼顾协作机器人本体可在多平台示教的需求。
下面对基于用户智能终端的安全示教器的示教方法进行说明。
一种基于用户智能终端的安全示教器的示教方法,其包括如下特征:
步骤S1:采用Android APP、IOS APP和/或Web技术开发示教软件,并存储在用户智能终端或传统示教器中;
步骤S2:根据输入接口模块的指令将示教软件传送到运动控制器,并设置示教软件的运行模式,运行模式为自动模式或手动模式;
步骤S3:通过普通平板电脑或智能手机中的微信APP或普通平板电脑或智能手机中的相机APP扫一下机器人本体身上的二维码,启动示教软件,并通过运动控制器操控机器人本体工作;个人笔记本电脑或个人台式机通过输入接口模块启动示教软件,并通过运动控制器操控机器人本体工作;
步骤S4:侦测安全板检测机器人本体工作异常时,接收自动模式或手动模式下的急停按钮及Deadman三位按钮所发出的指令,通过运动控制器操控机器人本体进入相应的状态。
在本技术的实施例中,APP示教软件运行于android操作系统并采用APK的方式发布到android应用市场;APP示教软件直接从android应用市场下载安装。
以上的仅为本技术的实施例,实施例并非用以限制本技术的专利保护范围,因此凡是运用本技术的说明书及附图内容所作的等同结构变化,同理均应包含在本技术的保护范围内。