铁氧体是一种半导体
ic半导体测试基础(中文版)88678
本章节我们来说说最基本的测试——开短路测试(Open-Short Test),说说测试的目的和方法。 一.测试目的 Open-Short Test也称为ContinuityTest或Contact Test,用以确认在器件测试时所有的信号引脚都与测试系统相应的通道在电性能上完成了连接,并且没有信号引脚与其他信号引脚、电源或地发生短路。 测试时间的长短直接影响测试成本的高低,而减少平均测试时间的一个最好方法就是尽可能早地发现并剔除坏的芯片。Open-Short测试能快速检测出DUT是否存在电性物理缺陷,如引脚短路、bond wire缺失、引脚的静电损坏、以及制造缺陷等。 另外,在测试开始阶段,Open-Short测试能及时告知测试机一些与测试配件有关的问题,如ProbeCard或器件的Socket没有正确的连接。 二.测试方法 Open-Short测试的条件在器件的规格数或测试计划书里通常不会提及,但是对大多数器件而言,它的测试方法及参数都是标准的,这些标准值会在稍后给出。 基于PMU的Open-Short测试是一种串行(Serial)静态的DC测试。首先将器件包括电源和地的所有管脚拉低至“地”(即我们常说的清0),接着连接PMU到单个的DUT 管脚,并驱动电流顺着偏置方向经过管脚的保护二极管——一个负向的电流会流经连接到地的二极管(图3-1),一个正向的电流会流经连接到电源的二极管(图3-2),电流的大小在100uA到500uA之间就足够了。大家知道,当电流流经二极管时,会在其P-N结上引起大约0.65V的压降,我们接下来去检测连接点的电压就可以知道结果了。 既然程序控制PMU去驱动电流,那么我们必须设置电压钳制,去限制Open管脚引起的电压。Open-Short测试的钳制电压一般设置为3V——当一个Open的管脚被测试到,它的测试结果将会是3V。 串行静态Open-Short测试的优点在于它使用的是DC测试,当一个失效(failure)发生时,其准确的电压测量值会被数据记录(datalog)真实地检测并显示出来,不管它是Open引起还是Short导致。缺点在于,从测试时间上考虑,会要求测试系统对DUT的每个管脚都有相应的独立的DC测试单元。对于拥有PPPMU结构的测试系统来说,这个缺点就不存在了。 当然,Open-Short也可以使用功能测试(Functional Test)来进行,我会在后面相应的章节提及。
教你认识半导体与测试设备
更多企业学院: 《中小企业管理全能版》183套讲座+89700份资料 《总经理、高层管理》49套讲座+16388份资料 《中层管理学院》46套讲座+6020份资料 《国学智慧、易经》46套讲座 《人力资源学院》56套讲座+27123份资料 《各阶段员工培训学院》77套讲座+ 324份资料 《员工管理企业学院》67套讲座+ 8720份资料 《工厂生产管理学院》52套讲座+ 13920份资料 《财务管理学院》53套讲座+ 17945份资料 《销售经理学院》56套讲座+ 14350份资料 《销售人员培训学院》72套讲座+ 4879份资料 第一章.认识半导体和测试设备(1) 本章节包括以下内容, 晶圆(Wafers)、晶片(Dice)和封装(Packages) 自动测试设备(ATE)的总体认识
模拟、数字和存储器测试等系统的介绍 负载板(Loadboards)、探测机(Probers)、机械手(Handlers)和温度控制单元(Temperature units) 一、晶圆、晶片和封装 1947年,第一只晶体管的诞生标志着半导体工业的开始,从那时起,半导体生产和制造技术变得越来越重要。以前许多单个的晶体管现在可以互联加工成一种复杂的集成的电路形式,这就是半导体工业目前正在制造的称之为"超大规模"(VLSI,Very Large Scale Integration)的集成电路,通常包含上百万甚至上千万门晶体管。 半导体电路最初是以晶圆形式制造出来的。晶圆是一个圆形的硅片,在这个半导体的基础之上,建立了许多独立的单个的电路;一片晶圆上这种单个的电路被称为die(我前面翻译成"晶片",不一定准确,大家还是称之为die好了),它的复数形式是dice.每个die都是一个完整的电路,和其他的dice没有电路上的联系。 当制造过程完成,每个die都必须经过测试。测试一片晶圆称为"Circuit probing"(即我们常说的CP测试)、"Wafer porbing"或者"Die sort"。在这个过程中,每个die都被测试以确保它能基本满足器件的特征或设计规格书(Specification),通常包括电压、电流、时序和功能的验证。如果某个die不符合规格书,那么它会被测试过程判为失效(fail),通常会用墨点将其标示出来(当然现在也可以通过Maping图来区分)。 在所有的die都被探测(Probed)之后,晶圆被切割成独立的dice,这就是常说的晶圆锯解,所有被标示为失效的die都报废(扔掉)。图2显示的是一个从晶圆上锯解下来没有被标黑点的die,它即将被封装成我们通常看到的芯片形式。
6.1转向系统匹配计算及设计
第六章 转向系统匹配计算及设计 根据总布置设计提供的满载前轴荷、前轮定位参数(参考同类车型数据库),按照汽车转向系设计的要求,参照其它同类车型,进行汽车转向系设计。 6.1 转向角和传动比 6.1.1 理论转向角-左右转角差大于实际汽车应设计值 传统的理论转向角为纯滚动理论-阿克曼理论,没有考虑车轮弹性和高速应用,因此有些过时,现代轿车设计为了节省车空间,一般在该理论算出左右转角差后,可以除以2~3作为设计数值更好。 如果通过所有4个车轮中心的车轮平面垂直线都相交于一点——转向中心M ,汽车在缓慢行驶时的转弯是精确的。如果后轮不一定转向,则2个前轮的垂线必须与后轮中心连线的延长线相交于M 点(图6.1.1)。如是在车身外侧的前轮上出现不同的转向角i δ和Aa δ。根据较大的侧车轮转向角i δ可以算出外侧车轮的理论值,即所谓的阿克曼角: l j ctg ctg i Aa /+=δδ (6.1.1) 式中:l 为在地面测得的两主销轴线延长线与地面交点交点的距离,即 s v r b j ?-=2 (6.1.2) 在负的主销偏移距r S 的情况下,它在式中的运算符号变成加号。 图6.1.1 由阿克曼角确定的车轮转向角Aa δ之间的运动学关系 图6.1.2 r S 是在图示情况下为正的主销偏距 图6.1.1 由阿克曼角确定的车身外侧车轮转向角和侧车轮转向角Aa δ之间的运动学关系。图中还标出了转向角差A δ?和转弯直径D s (亦见图6.1.1)。图6.1.2 前悬架上的尺寸说明:b v 是前轮轮距,r S 是在图示情况下为正的主销偏距。图6.1.1中标出的转向角差(也称弯角差)A δ?在所获得理论值中必须始终为正值。 Aa i A δδδ-=? (6.1.3) 根据角Aa δ可得出理论转弯直径D s (图6.1.1),即车身外侧前轮平面以最大的转向角转弯时经过的圆弧直径。汽车的转弯圆应尽可能小,以易于转弯及停车方便。依图示可推导出公式:
铁氧体吸波材料研究进展
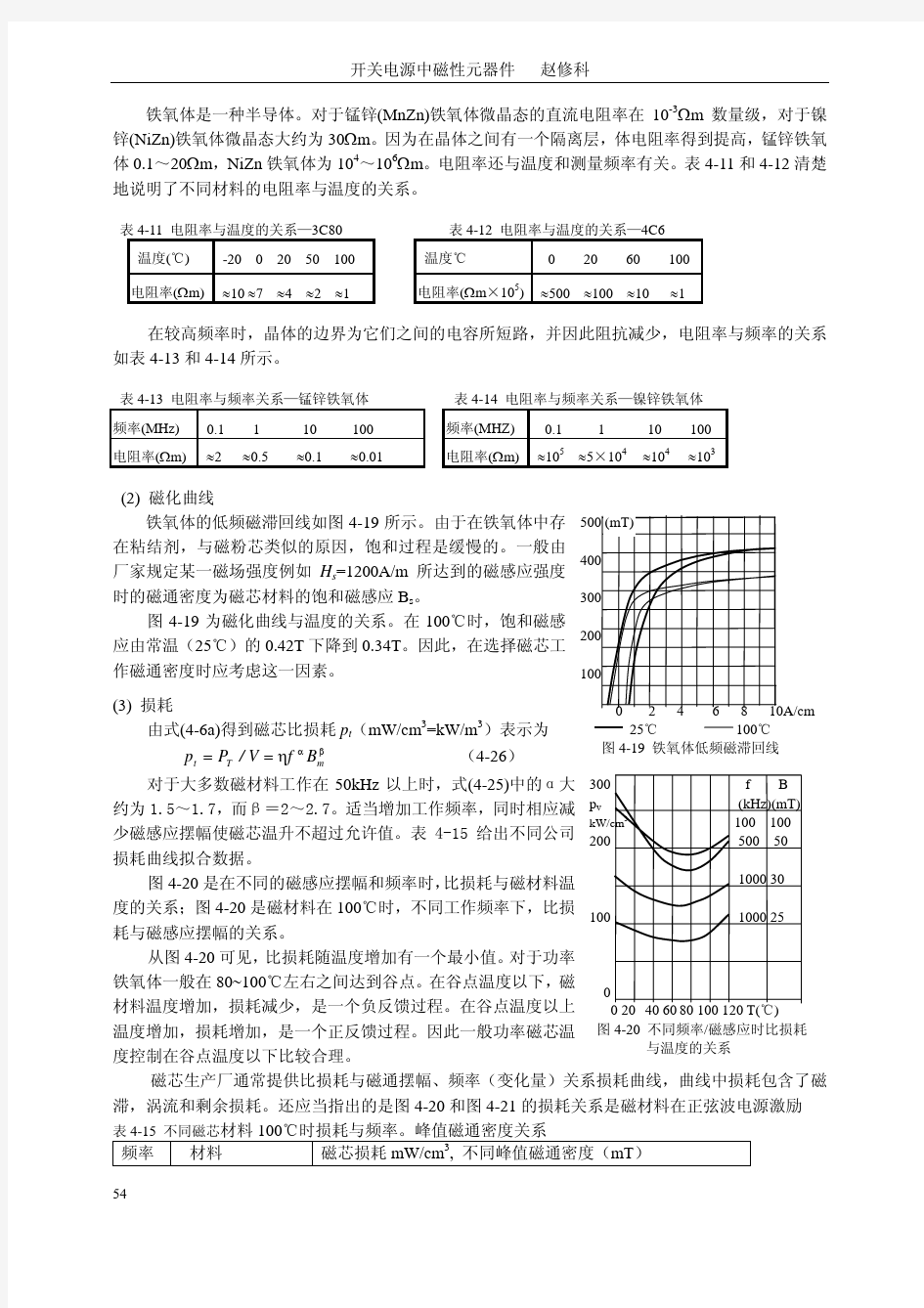
铁氧体吸波材料的研究进展 物理科学与技术学院凝聚态物理罗衡102211013 摘要:铁氧体吸波材料是既具有磁吸收的磁介质又具有电吸收的电介质,是性能极佳的一类吸波材料。本文对铁氧体吸波材料的工作原理、研究进展作了系统的介绍,并指出了铁氧体吸波材料的发展趋势。 关键词:铁氧体吸波材料研究进展 0 引言 近年来,随着电磁技术的快速发展,电磁波辐射也越来越多的充斥于我们的生活空间,电磁波辐射已成为继噪声污染、大气污染、水污染、固体废物污染之后的又一大公害。如电磁波辐射产生的电磁干扰(EMI)不仅会影响各种电子设备的正常运行,而且对身体健康也有危害。在军事高科技领域,随着世界各国防御体系的探测、跟踪、攻击能力越来越强,陆,海、空各军兵种军事目标的生存力,突防能力日益受到严重威胁;作为提高武器系统生存、突防,尤其是纵深打击能力的有效手段之一的隐身技术,正逐渐成为集陆、海、空、天、电、磁五位一体之立体化现代战争中最重要、最有效的突防战术手段。 目前一般采用的手段是利用电磁屏蔽材料的技术,来进行抗电磁干扰和电磁兼容设计,但是屏蔽材料对电磁波有反射作用,可能造成二次电磁辐射污染和干扰,所以最好的解决办法是采用吸波材料技术,因为吸波材料可以将投射到它表面的电磁波能量吸收,并使电磁波能量转化为热能或其他形式的能量消耗而不反射[1-3]。 用于隐身技术的雷达吸波材料已达十几种之多,与透波材料相比,吸波材料研究得更为成熟,其中应用较广的几类吸波材料有铁氧体、金属微粉、纳米吸波材料、导电高聚物和铁电吸波材料等。在众多吸波材料中,磁性吸波材料具有明显优势,而且将是主要的研究对象。磁性吸波材料主要包括铁氧体、超细金属粉、多晶铁纤维等几类。其中金属吸收剂具有使用温度高、饱和磁化强度和磁损耗能力大等特点,但也存在一些自身的缺点:如频率展宽有一定难度,这主要是由于其磁损耗不够大,磁导率随频率的升高而降低比较慢的缘故;化学稳定性差;耐腐蚀性能不如铁氧体等[4];而对于铁氧体来说,除了具有吸收强、吸收频带宽、成本低廉、制备工艺简单等优点外,还因为具有较好的频率特性(其相对磁导率较大,而相对介电常较小),更适合制作匹配层,相对于高介电常数高磁导率的金属粉,在低频率拓宽频带方面,更具有良好的应用前景[5-8]。
认识半导体和测试设备
认识半导体和测试设备 本章节包括以下内容, ●晶圆(Wafers)、晶片(Dice)和封装(Packages) ●自动测试设备(ATE)的总体认识 ●模拟、数字和存储器测试等系统的介绍 ●负载板(Loadboards)、探测机(Probers)、机械手(Handlers)和温 度控制单元(Temperature units) 一、晶圆、晶片和封装 1947年,第一只晶体管的诞生标志着半导体工业的开始,从那时起,半导体生产和制造技术变得越来越重要。以前许多单个的晶体管现在可以互联加工成一种复杂的集成的电路形式,这就是半导体工业目前正在制造的称之为"超大规模"(VLSI,Very Large Scale Integration)的集成电路,通常包含上百万甚至上千万门晶体管。 半导体电路最初是以晶圆形式制造出来的。晶圆是一个圆形的硅片,在这个半导体的基础之上,建立了许多独立的单个的电路;一片晶圆上这种单个的电路被称为die(我前面翻译成"晶片",不一定准确,大家还是称之为die好了),它的复数形式是dice.每个die 都是一个完整的电路,和其他的dice没有电路上的联系。
当制造过程完成,每个die都必须经过测试。测试一片晶圆称为"Circuit probing"(即我们常说的CP测试)、"Wafer porbing"或者"Die sort"。在这个过程中,每个die 都被测试以确保它能基本满足器件的特征或设计规格书(Specification),通常包括电压、电流、时序和功能的验证。如果某个die不符合规格书,那么它会被测试过程判为失效(fail),通常会用墨点将其标示出来(当然现在也可以通过Maping图来区分)。 在所有的die都被探测(Probed)之后,晶圆被切割成独立的dice,这就是常说的晶圆锯解,所有被标示为失效的die都报废(扔掉)。图2显示的是一个从晶圆上锯解下来没有被标黑点的die,它即将被封装成我们通常看到的芯片形式。 注:本标题系列连载内容及图片均出自《The Fundamentals Of Digital Semiconductor Testing》 第一章.认识半导体和测试设备(2)
汽车转向系统设计计算匹配方式方法
1 汽车转向系统的功能 1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。 对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘 转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。这时, 基本上是角输入。而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有 一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。 1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。这种反馈,通常称为路感。 驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、 身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车 的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路 感是优良的操稳性中不可缺少的部分。 反馈分为力反馈和角反馈 从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。 2 转向系统设计的基本要求 转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。转向系的基本要求如下: 2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。 不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。实际上,没有哪 一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向 角(轮15°~25°围)使转向外轮运动关系逼近上述要求。 2.2 良好的回正性能 汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。转向轮的回正力矩的大小主要由悬架系统所决定的前 轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销倾角、 主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系统的 逆效率等。 2.3汽车在任何行驶状态下,转向轮不得产生自振,方向盘没有摆动。 2.4 转向机构与悬架机构的运动不协调所造成的运动干涉应尽可能小,由于运动干涉使转向轮产生的摆动应最小。 汽车转弯行驶时,作用在汽车质心处的离心力的作用,轮载荷减小,外轮载荷
半导体C-V测量基础
半导体C-V测量基础 作者:Lee Stauffer 时间:2009-07-29 来源:吉时利仪器公司 C-V测量为人们提供了有关器件和材料特征的大量信息 通用测试 电容-电压(C-V)测试广泛用于测量半导体参数,尤其是MOSCAP和MOSFET结构。此外,利用C-V测量还可以对其他类型的半导体器件和工艺进行特征分析,包括双极结型晶体管(BJT)、JFET、III-V族化合物器件、光伏电池、MEMS器件、有机TFT显示器、光电二极管、碳纳米管(CNT)和多种其他半导体器件。 这类测量的基本特征非常适用于各种应用和培训。大学的研究实验室和半导体厂商利用这类测量评测新材料、新工艺、新器件和新电路。C-V测量对于产品和良率增强工程师也是极其重要的,他们负责提高工艺和器件的性能。可靠性工程师利用这类测量评估材料供货,监测工艺参数,分析失效机制。 采用一定的方法、仪器和软件,可以得到多种半导体器件和材料的参数。从评测外延生长的多晶开始,这些信息在整个生产链中都会用到,包括诸如平均掺杂浓度、掺杂分布和载流子寿命等参数。在圆片工艺中,C-V测量可用于分析栅氧厚度、栅氧电荷、游离子(杂质)和界面阱密度。在后续的工艺步骤中也会用到这类测量,例如光刻、刻蚀、清洗、电介质和多晶硅沉积、金属化等。当在圆片上完全制造出器件之后,在可靠性和基本器件测试过程中可以利用C-V测量对阈值电压和其他一些参数进行特征分析,对器件性能进行建模。 半导体电容的物理特性 MOSCAP结构是在半导体制造过程中形成的一种基本器件结构(如图1所示)。尽管这类器件可以用于真实电路中,但是人们通常将其作为一种测试结构集成在制造工艺中。由于这种结构比较简单而且制造过程容易控制,因此它们是评测底层工艺的一种方便的方法。
教你认识半导体与测试设备
? 第一章.认识半导体和测试设备(1) 本章节包括以下内容, ●晶圆(Wafers)、晶片(Dice)和封装(Packages) ●自动测试设备(ATE)的总体认识
●模拟、数字和存储器测试等系统的介绍 ●负载板(Loadboards)、探测机(Probers)、机械手(Handlers)和温 度控制单元(Temperature units) 一、晶圆、晶片和封装 1947年,第一只晶体管的诞生标志着半导体工业的开始,从那时起,半导体生产和制造技术变得越来越重要。以前许多单个的晶体管现在可以互联加工成一种复杂的集成的电路形式,这就是半导体工业目前正在制造的称之为"超大规模"(VLSI,Very Large Scale Integration)的集成电路,通常包含上百万甚至上千万门晶体管。 半导体电路最初是以晶圆形式制造出来的。晶圆是一个圆形的硅片,在这个半导体的基础之上,建立了许多独立的单个的电路;一片晶圆上这种单个的电路被称为die(我前面翻译成"晶片",不一定准确,大家还是称之为die好了),它的复数形式是dice.每个die都是一个完整的电路,和其他的dice没有电路上的联系。 当制造过程完成,每个die都必须经过测试。测试一片晶圆称为"Circuit probing"(即我们常说的CP测试)、"Wafer porbing"或者"Die sort"。在这个过程中,每个die都被测试以确保它能基本满足器件的特征或设计规格书(Specification),通常包括电压、电流、时序和功能的验证。如果某个die不符合规格书,那么它会被测试过程判为失效(fail),通常会用墨点将其标示出来(当然现在也可以通过Maping图来区分)。 在所有的die都被探测(Probed)之后,晶圆被切割成独立的dice,这就是常说的晶圆锯解,所有被标示为失效的die都报废(扔掉)。图2显示的是一个从晶圆上锯解下来没有被标黑点的die,它即将被封装成我们通常看到的芯片形式。
转向系统设计计算书
密级:版本/更改状态:第一版/0 编号: 长城汽车股份有限公司技术文件 CC6460K/KY 转向系统设计计算书 编制: 审核: 审定: 批准: 长城汽车股份有限公司 二OO四年四月十五日
目录 1 系统概述????????????????????????????????????????????????????????????????????????????????????????????????????????????????1 2 转向系统设计依据的整车参数计设计要求????????????????????????????????????????????????????????2 3 转向系统设计过程????????????????????????????????????????????????????????????????????????????????????????????????2 3.1 最小转弯半径计算?????????????????????????????????????????????????????????????????????????????????????????2 3.2 转向系的角传动比计算?????????????????????????????????????????????????????????????????????????????????3 3.3 转向系的力传动比计算?????????????????????????????????????????????????????????????????????????????????3 3. 4 转向系的内外轮转角?????????????????????????????????????????????????????????????????????????????????????4 3. 5 液压系统的匹配计算?????????????????????????????????????????????????????????????????????????????????????5 3.5.1 转向油泵流量的计算??????????????????????????????????????????????????????????????????????????5 3.5.2 转向油泵压力的变化??????????????????????????????????????????????????????????????????????????6 4 结论说明????????????????????????????????????????????????????????????????????????????????????????????????????????????????7 5 参考文献????????????????????????????????????????????????????????????????????????????????????????????????????????????????8
1纳米铁氧体磁性材料的制备
材料科学前沿 题目:纳米铁氧体磁性材料学院:理学院 班级:Y130802 姓名:陈国红 学号:S1*******
摘要:铁氧体纳米磁性材料是一类非常重要的无机功能材料,其应用涉及到电子、信息、航天航空、生物医学等领域。综述了纳米结构铁氧体磁性材料化学制备方法的研究进展,以及它们的应用,分析了其存在的问题,展望了研究和开发纳米结构铁氧体磁性材料的新性能和新技术的应用前景。 关键词:纳米磁性材料;铁氧体;制备;应用
铁氧体是从20世纪40年代迅速发展起来的一种新型的非金属磁性材料。与金属磁性材料相比,铁氧体具有电阻率大、介电性能高、在高频时具有较高的磁导率等优点。随着科学技术的发展,铁氧体不仅在通讯广播、自动控制、计算技术和仪器仪表等电子工业部门应用日益广泛,已经成为不可缺少的组成部分,而且在宇宙航行、卫星通讯、信息显示和污染处理等方面,也开辟了广阔的应用空间。在生产工艺上,铁氧体类似于一般的陶瓷工艺,操作方便易于控制,不像金属磁性材料那样要轧成薄片或制成细粉介质才能应用。由于铁氧体性能好、成本低、工艺简单、又能节约大量贵金属,已成为高频弱电领域中很有发展前途的一种非金属磁性材料 l铁氧体的晶体结构 铁氧体作为一种具有铁磁性的金属氧化物,是由铁和其他一种或多种金属组成的复合氧化物。实用化的铁氧体主要有以下几种晶体类刑 1.1尖晶石型铁氧体 尖晶石型铁氧体的化学分子式为MnFe 20 4 或M0Fe 2 3 ,M是指离子半径与二价 铁离子相近的二价金属离子(Mn2+、Zn2+、Cu2+、Ni2+、Mg2+、Co2+等)或平均化学价为 二价的多种金属离子组(如Li 0.5Fe 0.53 )。以Mn2+替代Fe2+所合成的复合氧化物 MnFe 20 4 称为锰铁氧体,以Zn2+替代Fe2+所合成的复合氧化物ZnFe 2 4 称为锌铁氧体。 通过控制替代金属,可以达到控制材料磁特性的目的。由一种金属离子替代而成的铁氧体称为单组分铁氧体。由两种或两种以上的金属离子替代可以合成出双组 分铁氧体和多组分铁氧体。锰锌铁氧体(Mn—ZnFe 2O 4 )和镍锌铁氧体(Ni—ZnFe 2 4 ) 就是双组分铁氧体,而锰镁锌铁氧体(Mn—Mg—ZnFe 2O 4 )则是多组分铁氧体。 1.2磁铅石型铁氧体 磁铅石型铁氧体是与天然矿物——磁铅石Pb(Fe 7.5Mn 3.5 Al o.5 Ti 0.5 )0 19 有类似晶 体结构的铁氧体,属于六角晶系,分子式为MFe l20 19 或Bao·6Fe 2 3 ,M为二价金 属离子Ba2+、Sr2+、Pb2+等。通过控制替代金属,也可以获得性能改善的多组分铁氧体。 1.3石榴石型铁氧体 石榴石型铁氧体是指一种与天然石榴石(Fe,Mg) 3A1 2 (Si0 4 ) 3 有类似晶体结构
(设备管理)半导体和测试设备介绍
第一章.认识半导体和测试设备(1) 本章节包括以下内容, ●晶圆(Wafers)、晶片(Dice)和封装(Packages) ●自动测试设备(ATE)的总体认识 ●模拟、数字和存储器测试等系统的介绍 ●负载板(Loadboards)、探测机(Probers)、机械手(Handlers)和温 度控制单元(Temperature units) 一、晶圆、晶片和封装 1947年,第一只晶体管的诞生标志着半导体工业的开始,从那时起,半导体生产和制造技术变得越来越重要。以前许多单个的晶体管现在可以互联加工成一种复杂的集成的电路形式,这就是半导体工业目前正在制造的称之为"超大规模"(VLSI,Very Large Scale Integration)的集成电路,通常包含上百万甚至上千万门晶体管。 半导体电路最初是以晶圆形式制造出来的。晶圆是一个圆形的硅片,在这个半导体的基础之上,建立了许多独立的单个的电路;一片晶圆上这种单个的电路被称为die(我前面翻译成"晶片",不一定准确,大家还是称之为die好了),它的复数形式是dice.每个die都是一个完整的电路,和其他的dice没有电路上的联系。
当制造过程完成,每个die都必须经过测试。测试一片晶圆称为"Circuit probing"(即我们常说的CP测试)、"Wafer porbing"或者"Die sort"。在这个过程中,每个die都被测试以确保它能基本满足器件的特征或设计规格书(Specification),通常包括电压、电流、时序和功能的验证。如果某个die不符合规格书,那么它会被测试过程判为失效(fail),通常会用墨点将其标示出来(当然现在也可以通过Maping图来区分)。 在所有的die都被探测(Probed)之后,晶圆被切割成独立的dice,这就是常说的晶圆锯解,所有被标示为失效的die都报废(扔掉)。图2显示的是一个从晶圆上锯解下来没有被标黑点的die,它即将被封装成我们通常看到的芯片形式。 注:本标题系列连载内容及图片均出自《The Fundamentals Of Digital Semiconductor Testing》
转向系统匹配
本人从事转向系统设计工作,今赋闲在家,偶然发现这个论坛,获益颇丰。但见很多朋友所求助的问题得到的解答不是特别透彻,遂想从转向系统布置、匹配、零部件8D整改等方面分别做一个全面的总结。希望对新手有所帮助,不对的地方也希望能得到各位前辈的指正。言归正传,先介绍转向系统的匹配。 匹配篇:0 ? W6 I! m& P! \( A7 Q 1、以循环球整体式转向器为例,首先要确定转向系统的载荷,根据转向系统的载荷确定出相应输出力矩的循环球转向器。转向系的载荷计算方法多种多样,有公式计算法,也有图表法。常用公式有原苏联半经验公式、雷雷索夫公式、塔布莱克公式等,各个公式的侧重点各有不同(不同的因素分别为有的考虑主销偏置距,轮胎静力半径,有的分别考虑计算左右轮的最大转向阻力矩然后叠加,有的考虑轮胎接地面积等)。根据自己对各个方法的对比,载荷计算结果差别不是很大。本人常用苏联半经验公式: Mr =[f×(G 13÷P)1/2]÷3: @# a# r" y. W; {0 N P Mr-----在沥青或混凝土路面上的原地转向阻力矩,N.mm;+ ?/ e1 f7 a& P$ ]' G f--------轮胎与地面间的滑动摩擦系数,取0.7;+ k3 M+ n' w. Z5 l G1-----转向轴负荷,N; P-------轮胎气压,MPa;9 h+ M9 }: J( Q 该公式适用于中轻型汽车,其悬挂为钢板弹簧时,用于计算最大转向阻力矩(即汽车的原地转向阻力矩)。该公式仅考虑了前桥负荷和轮胎气压的影响。 公式中,转向轴荷G一般按设计轴荷超载30%计算。 在计算载荷确定之后,可根据载荷选取适合的动力转向器。 这里顺便介绍下转向器的选型,现在的动力转向器配套供应商做了大量的研究和实验,提出了适应不同轴荷的其产品系列,你只要按照你计算出的前轴负荷提供给他,他即可推荐给你相匹配的型号的转向器。根据自己的经验,具体选型时要考虑以下几点因素:1、同一范围的轴荷在不同前轮最大转角的情况下2、根据车型使用工况进行斟酌。以上两点主要从多种车型转向器模块化管理,减少转向器品种方面考虑的。 走题了,继续。- A: Z2 F4 J, x# V5 n 转向器流量计算 Q=(1. 5~2)×60ntS/K! r& {* c* w, E6 I 上式参数依次为汽车方向盘最大瞬时转速(转/秒),9 E2 {. D/ z: Q4 k1 l1 E! }4 T 助力方向机丝杆螺距;助力方向机油缸实际工作面积;助力方向机效率系数(泄漏系数)! f, O' i0 }! \& O 2、转向助力泵的匹配。% F& \+ p2 ]* X- A4 o $ `5 l1 f5 G: J# V9 s 系统压力的计算可根据下列公式) Z$ ` `9 [% d( k- D* y7 B P=4*M÷π÷D(平方) ÷r÷i÷n 上式参数依次为转向阻力矩、转向器缸径、齿扇啮合半径、转向力传动比、转向机的正效率。 转向油泵的控制流量可根据以下公式$ r" H! N! G. R5 f0 _, K! [; d: w Q=S*n*t÷k9 U0 m/ v2 r# A A 上式参数依次为活塞面积,方向盘转速,取1.5,螺杆螺距、转向器泄露系数取0.855 S$ z- {& @1 M( M+ x0 E 转向泵怠速状态下流量可根据下公式7 ?: L$ ^8 O- {3 c1 P. c
聚合物无机物纳米复合材料
聚合物/无机物纳米复合材料 张凌燕 牛艳萍 (武汉理工大学资源与环境工程学院,武汉,430070) E-mail:zhly@https://www.360docs.net/doc/d111483432.html,或niuyanping2004@https://www.360docs.net/doc/d111483432.html, 摘 要:本文从聚合物/无机物纳米复合材料的类型、各种制备方法及原理、优异性能及应用等方面,总结了聚合物/无机物纳米复合材料的研究进展。 关键词:聚合物/无机物纳米复合材料;增韧;表面改性 1 前 言 纳米材料是指材料二相显微结构中至少有一相的一维尺度达到纳米级尺寸(100nm以下)的材料。纳米复合材料是指2种或2种以上的吉布斯固相至少在一个方向以纳米级大小(1~100nm)复合而成的复合材料[1]。聚合物/无机物纳米复合材料(简称OINC)是以聚合物为基体(连续相)、无机物以纳米尺度(小于100nm)分散于基体中的新型高分子复合材料[2]。按照无机物纳米粒子形态结构,OINC可分为聚合物/无机粒子纳米复合材料、聚合物/无机纤维纳米复合材料、聚合物/片层状无机物纳米复合材料。用于制备OINC的无机物包括:粘土类如滑石粉、蒙脱土、云母、水辉石等,陶瓷如SiO2、TiO2、Al2O3、AlN、ZrO2、SiC、Si3N4等,聚硅氧烷,CaCO3,分子筛,金属氧化物如V2O5、MoO3、WO3等,层状过渡金属二硫化物或硫代亚磷酸盐如MoS2、TiS2、TaS2、MPS3(M=Mn、Cd等),层状金属盐类化合物、双氢氧化物,以及碳黑、碳纤维等[3]。与传统的复合材料相比,由于纳米粒子带来的纳米效应和纳米粒子与基体间强的界面相互作用,聚合物纳米复合材料具有优于相同组分常规聚合物复合材料的力学、热学性能,为制备高性能、多功能的新一代复合材料提供了可能。 2 无机纳米粒子的增韧机理及表面修饰 2.1 增韧机理 (1)在变形中,刚性无机粒子不会产生大的伸长变形,在大的拉应力作用下,基体和无机粒子的界面部分脱粘形成空穴,使裂纹钝化,不致发展成破坏性裂缝;无机粒子的存在产生应力集中效应,引发粒子周围的树脂基体屈服(空化、银纹、剪切带)。这种界面脱粘和屈服都需要消耗更多的能量,从而起到增韧作用。 (2)由于纳米粒子的比表面积大,表面的物理和化学缺陷越多,粒子与高分子链发生物理或化学结合的机会越多,因而与基体接触面积增大,材料受冲击时,会产生更多的微开裂,吸收更多的冲击能[4]。 2.2 表面修饰 刚性无机粒子的粒径越小,与基体接触面积越大,若能均匀分布,增韧增强的效果就越 1
半导体测试技术实践
半导体测试技术实践总结报告 一、实践目的 半导体测试技术及仪器集中学习是在课堂结束之后在实习地集中的实践性教学,是各项课间的综合应用,是巩固和深化课堂所学知识的必要环节。学习半导体器件与集成电路性能参数的测试原理、测试方法,掌握现代测试设备的结构原理、操作方法与测试结果的分析方法,并学以致用、理论联系实际,巩固和理解所学的理论知识。同时了解测试技术的发展现状、趋势以及本专业的发展现状,把握科技前进脉搏,拓宽专业知识面,开阔专业视野,从而巩固专业思想,明确努力方向。另外,培养在实际测试过程中发现问题、分析问题、解决问题和独立工作的能力,增强综合实践能力,建立劳动观念、实践观念和创新意识,树立实事求是、严肃认真的科学态度,提高综合素质。 二、实践安排(含时间、地点、内容等) 实践地点:西安西谷微电子有限责任公司 实践时间:2014年8月5日—2014年8月15日 实践内容:对分立器件,集成电路等进行性能测试并判定是否失效 三、实践过程和具体内容 西安西谷微电子有限责任公司专业从事集成电路测试、筛选、测试软硬件开发及相关技术配套服务,测试筛选使用标准主要为GJB548、GJB528、GJB360等。 1、认识半导体及测试设备
在一个器件封装之后,需要经过生产流程中的再次测试。这次测试称为“Final test”(即我们常说的FT测试)或“Package test”。在电路的特性要求界限方面,FT测试通常执行比CP测试更为严格的标准。芯片也许会在多组温度条件下进行多次测试以确保那些对温度敏感的特征参数。商业用途(民品)芯片通常会经过0℃、25℃和75℃条件下的测试,而军事用途(军品)芯片则需要经过-55℃、25℃和125℃。 芯片可以封装成不同的封装形式,图4显示了其中的一些样例。一些常用的封装形式如下表: DIP: Dual Inline Package (dual indicates the package has pins on two sides) 双列直插式 CerDIP:Ceramic Dual Inline Package 陶瓷 PDIP: Plastic Dual Inline Package 塑料 PGA: Pin Grid Array 管脚阵列
半导体和测试设备介绍_图文(精)
第一章.认识半导体和测试设备(1 本章节包括以下内容, ●晶圆(Wafers)、晶片(Dice)和封装(Packages) ●自动测试设备(ATE)的总体认识 ●模拟、数字和存储器测试等系统的介绍 ●负载板(Loadboards)、探测机(Probers)、机械手(Handlers)和温度控制单元(Temperature units) 一、晶圆、晶片和封装 1947年,第一只晶体管的诞生标志着半导体工业的开始,从那时起,半导体生产和制造技术变得越来越重要。以前许多单个的晶体管现在可以互联加工成一种复杂的集成的电路形式,这就是半导体工业目前正在制造的称之为"超大规模"(VLSI,Very Large Scale Integration)的集成电路,通常包含上百万甚至上千万门晶体管。 半导体电路最初是以晶圆形式制造出来的。晶圆是一个圆形的硅片,在这个半导体的基础之上,建立了许多独立的单个的电路;一片晶圆上这种单个的电路被称为die (我前面翻译成"晶片",不一定准确,大家还是称之为die好了),它的复数形式是dice.每个die都是一个完整的电路,和其他的dice没有电路上的联系。 当制造过程完成,每个die都必须经过测试。测试一片晶圆称为"Circuit probing"(即我们常说的CP测试)、"Wafer porbing"或者"Die sort"。在这个过程中,每个die都被测试以确保它能基本满足器件的特征或设计规格书(Specification),通常包括电压、
电流、时序和功能的验证。如果某个die不符合规格书,那么它会被测试过程判为失效(fail),通常会用墨点将其标示出来(当然现在也可以通过Maping图来区分)。 在所有的die都被探测(Probed)之后,晶圆被切割成独立的dice,这就是常说的晶圆锯解,所有被标示为失效的die都报废(扔掉)。图2显示的是一个从晶圆上锯解下来没有被标黑点的die,它即将被封装成我们通常看到的芯片形式。 注:本标题系列连载内容及图片均出自《The Fundamentals Of Digital Semiconductor Testing》 第一章.认识半导体和测试设备(2 在一个Die封装之后,需要经过生产流程中的再次测试。这次测试称为“Final test”(即我们常说的FT测试)或“Package test”。在电路的特性要求界限方面,FT测试通常执行比CP测试更为严格的标准。芯片也许会在多组温度条件下进行多次测试以确保那些对温度敏感的特征参数。商业用途(民品)芯片通常会经过0℃、25℃和75℃条件下的测试,而军事用途(军品)芯片则需要经过 -55℃、25℃和125℃。
转向系统设计计算报告
目录 1.系统概述 (1) 1.1系统设计说明 (1) 1.2系统结构及组成 (1) 1.3系统设计原理及规 (2) 2.输入条件 (2) 2.1标杆车基本参数 (2) 2.2LF7133确定的整车参数 (4) 3.系统计算及验证 (4) 3.1方向盘转动圈数 (4) 3.2齿轮齿条式转向系的角传动比 (5) 3.3车轮实际最大转角 (5) 3.4静态原地转向阻力矩 (6) 3.5静态原地转向时作用于转向盘的力 (6) 3.6最小转弯半径的校核 (7) 4.总结 (8) 参考文献 (9)
1.系统概述 1.1系统设计说明 LF7133是在标杆车的基础上开发设计的一款全新车型,其转向系统是在标杆车转向系统为依托的前提下,根据总布置设计任务书而开发设计的。根据项目要求,需要对转向系统各参数进行计算与较核,以确保转向系统的正常使用,使系统中各零部件之间参数匹配合理,并且确保其满足国家相关法律法规的要求。 1.2系统结构及组成 LF7133转向系统是在标杆车的基础上,根据驾驶室和发动机舱的布置,对转向管柱、方向盘和转向器等作相应调整与优化设计。为提高汽车行驶的安全性,转向系必须转向轻便、灵活,以减轻司机的疲劳。LF7133电动助力转向系统中转向器采用齿轮齿条式转向器、电动助力转向管柱的结构方式。该结构紧凑,布置方便,降低油耗,工作可靠,维修方便,并且满足了整车的各项指标。 1).转向系统的结构简图 3 2 图1 转向系统结构简图 1、转向器 2、电动助力转向管柱 3、转向盘
2).转向系统的转向梯形示意简图 由于LF7133转向系结构与布置情况参照标杆车设计,所以LF7133与标杆车转向梯形示意图一致,如下图2所示。 1.3系统设计原理及规 对于液压动力转向系的设计,在保证系统拥有正常助力功用的情况下,还应满足如下的技术要求: 1).根据GB17675-1999 汽车转向系基本要求的规定,同样要求在不带助力转 向时转向力应小于254N。 2).对于乘用车来说,还要求转向盘转动在总圈数一般不超过4圈。 3).在转向系最大转角时,要求其最小转弯直径满足整车总布置参数。 2.输入条件 2.1标杆车基本参数 对于标杆车其参数采集可分为为直接测量参数和间接计算参数,对于标杆车具体的参数如下: 1).直接测量参数 表1 标杆车基本参数
半导体测试设备项目可研报告
半导体测试设备项目 可研报告 规划设计/投资方案/产业运营
半导体测试设备项目可研报告 半导体测试设备主要包括探针台、分选机、测试机等。其中测试功能由测试机实现,而探针台和分选机实现的则是机械功能,将被测晶圆/芯片拣选至测试机进行检测。探针台和分选机的主要区别在于,探针台针对的是晶圆级检测,而分选机则是针对封装的芯片级检测。 该半导体测试设备项目计划总投资20252.43万元,其中:固定资产投资15706.87万元,占项目总投资的77.56%;流动资金4545.56万元,占项目总投资的22.44%。 达产年营业收入42958.00万元,总成本费用33649.38万元,税金及附加393.69万元,利润总额9308.62万元,利税总额10986.26万元,税后净利润6981.47万元,达产年纳税总额4004.80万元;达产年投资利润率45.96%,投资利税率54.25%,投资回报率34.47%,全部投资回收期 4.40年,提供就业职位912个。 报告针对项目的特点,分析投资项目能源消费情况,计算能源消费量并提出节能措施;分析项目的环境污染、安全卫生情况,提出建设与运营过程中拟采取的环境保护和安全防护措施。 ......
半导体测试设备项目可研报告目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
转向系统部分计算说明书
与转向系统相关的整车参数 最小转弯半径 1)按外轮最大转角 R1=L/sinα+C=2550/sin32.26°-11.7=4.77m 2)按内轮最大转角 R2=[(L/tanβ+B) 2+L2]1/2+C =[(2550/tan38.63°+1540) 2+25502]1/2-11.7 =5.4m 取最小转弯半径Rmin=(R1+R2)/2=5.1m 转向系统布置及传动比匹配 按照总布置给定转向器位置,对转向杆系进行优化设计,得到:齿条行程:140mm 转向器传动比:49.37mm/rev 方向盘总圈数:140/49.37=2.84圈 转向力计算 转向时驾驶员作用到转向盘上的手力与转向轮在地面上回转时产生的转向阻力矩有关。影响转向阻力矩的主要因素有转向轴的负荷、轮胎与地面之间的滑动摩擦系数和轮胎气压。计算公式如下:
转向机的计算 XXX采用的是液压动力转向器,动力转向器应满足下述几个基本要求: ○1运动学上应保持转向轮转角和驾驶员转动转向盘的转角之间保持一定的比例关系○2在减小转向时作用在方向盘上的手力的同时,还应当有合适的“路感”; ○3工作要安全可靠,在动力部分失效后应不影响汽车的行驶安全性 ○4密封性能良好 ○5工作时没有噪声和振动 ○6工作灵敏,转动转向盘后,系统内的压力很快能增长到最高值 首先我们来计算转向机最小应能满足的输出力,对转向机来说只要它输出的对主销的力矩必须能克服地面的最大阻力距,故: F = M r /(L 1 ×cos2θ*ηT) 其中 M r ——原地转向最大阻力距 L 1 ——转向横拉杆到主销的力臂长度 θ——主销内倾角 ηT——梯形机构正效率,此效率一般在0.9左右 在M12中 L 1 =131mm 因此换算到转向机出口点处的力为 Fn = 403424/(131×cos2(12.9°)×0.9)=3602N,为原地转向时转向机应输出的力。 按照下式计算动力转向机理论输出力: Fs=P×S+2×H T×3.14/i 其中: Fs―――转向机理论输出力(N) P―――油缸内工作压力(Pa) S―――油缸有效受压面积(m2) H T ―――方向盘转矩(N.m) i―――转向机传动比(m/rev) 在助力原地转向的情况下,原地阻力距主要靠液压油压力提供,同时方向盘输入力矩也起部分作用,考虑发动机怠速时动力泵的输出压力,按动力转向泵的最小压力计算,即: H T =3.6N.m P=4.6MPa(被选用油泵的最小压力) S=8.946cm2 i=49.37mm/rev 时 按照上述公式可得出Fs=4573N 大于 Fn,能克服原地转向阻力。 选用转向机参数如下: