路径规划遗传算法流程图
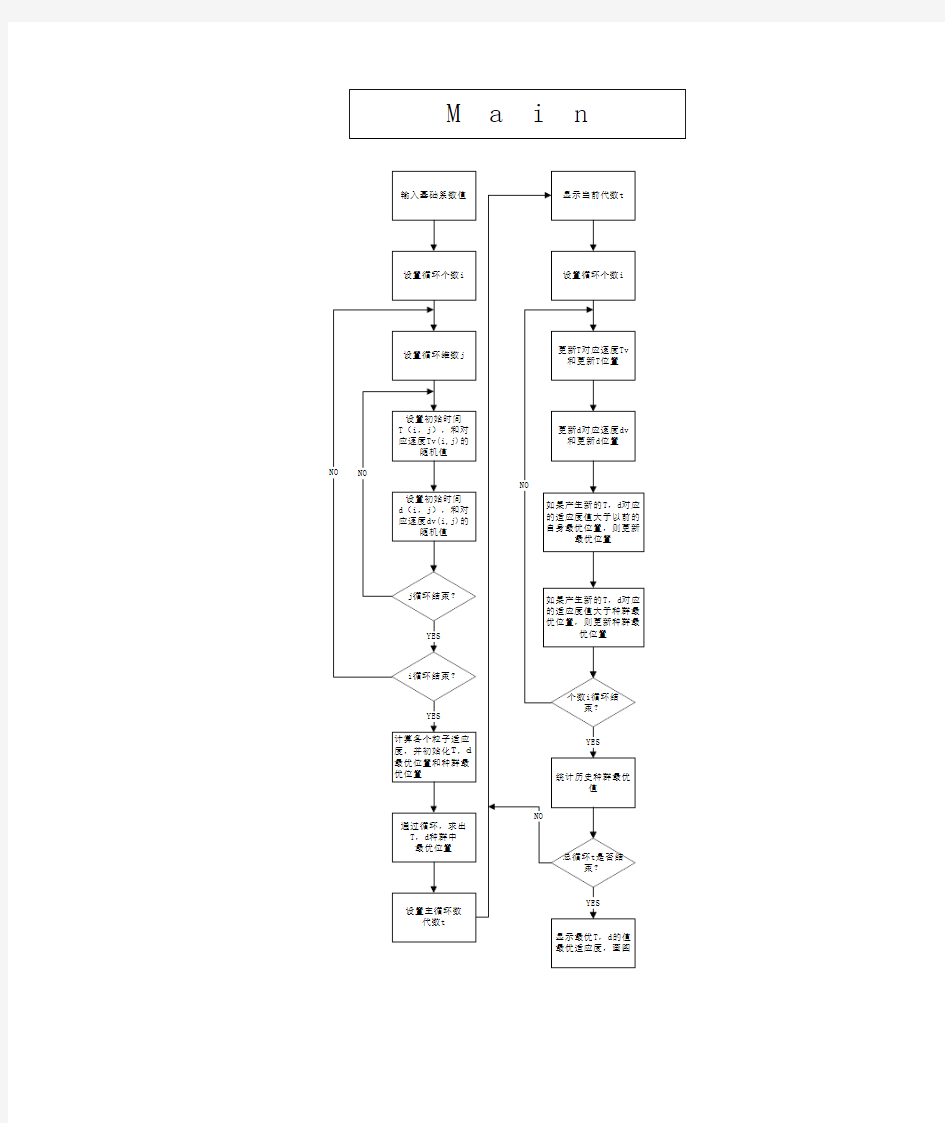
M a i n
输入基础系数值
设置循环个数i 设置循环维数j
设置初始时间T (i ,j ),和对应速度Tv(i,j)的
随机值
设置初始时间d (i ,j ),和对应速度dv(i,j)的
随机值
j 循环结束?
i 循环结束?
YES
NO
NO
计算各个粒子适应度,并初始化T ,d 最优位置和种群最优位置
YES
通过循环,求出T ,d 种群中最优位置
设置主循环数
代数t
显示当前代数t
设置循环个数i
更新T 对应速度Tv 和更新T 位置
更新d 对应速度dv 和更新d 位置
如果产生新的T ,d 对应的适应度值大于以前的自身最优位置,则更新
最优位置
如果产生新的T ,d 对应的适应度值大于种群最优位置,则更新种群最
优位置
个数i 循环结
束?
统计历史种群最优
值YES
总循环t 是否结
束?
显示最优T ,d 的值最优适应度,画图
YES
NO
NO
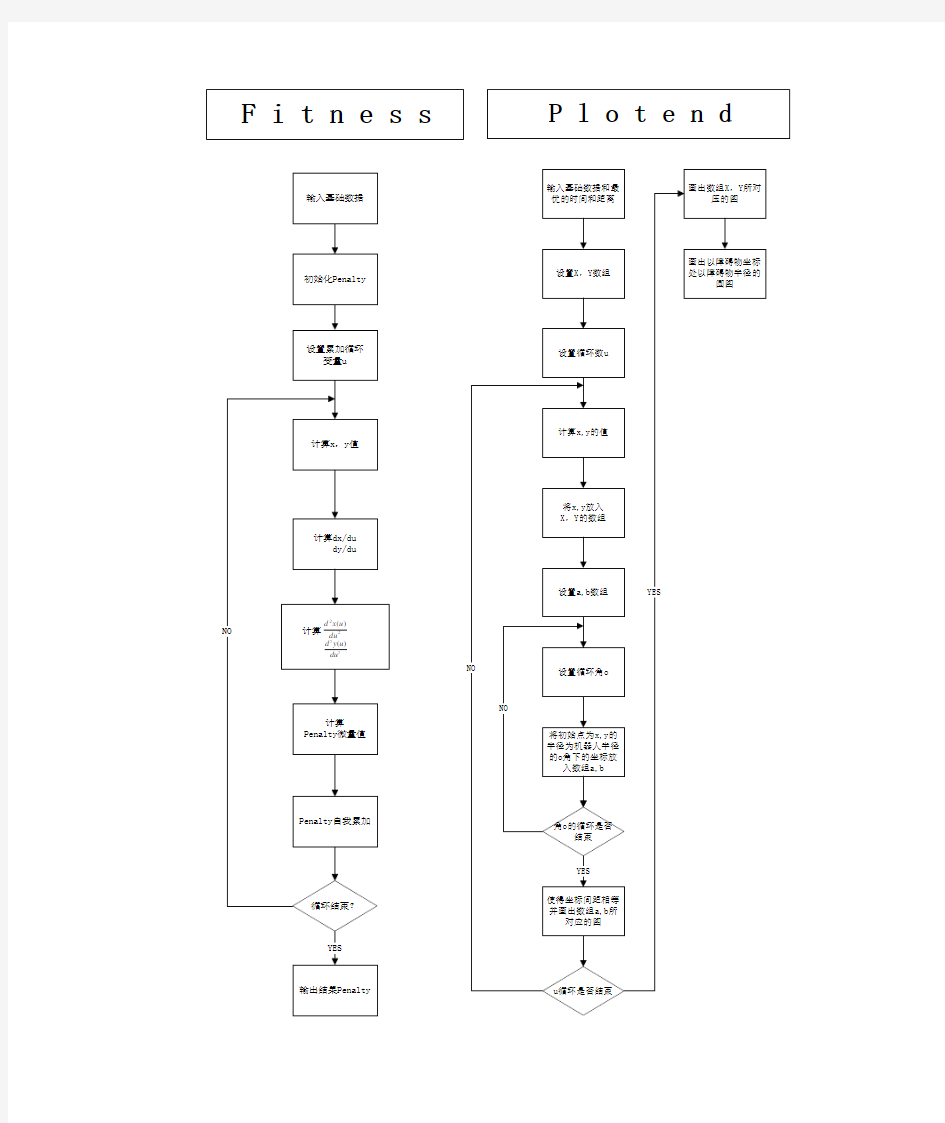
F i t n e s s
输入基础数据
设置累加循环
变量u
初始化Penalty
计算x ,y 值
计算dx/du dy/du
计算
22
()
d x u du 22
()
d y u du 计算
Penalty 微量值
Penalty 自我累加
循环结束?
输出结果Penalty
NO
YES
P l o t e n d
输入基础数据和最优的时间和距离
设置X ,Y 数组
设置循环数u
计算x,y 的值
将x,y 放入X ,Y 的数组
设置a,b 数组设置循环角o
将初始点为x,y 的半径为机器人半径的o 角下的坐标放
入数组a,b
角o 的循环是否
结束
使得坐标间距相等并画出数组a,b 所
对应的图
YES
NO
u 循环是否结束
NO
画出数组X ,Y 所对
压的图
YES
画出以障碍物坐标处以障碍物半径的
圆图
遗传算法及Matlab说明
其MATLAB实现 者:老牛网友评论17 条浏览次数602 (1)遗传算法简介 (2)遗传算法的MA TLAB实现 (3)应用举例 (4)遗传算法优化神经网络方向 在工业工程中,许多最优化问题性质十分复杂,很难用传统的优化方法来求解.自1960年以来,人们对求解这类难解问题日益增加.一种模仿生物自然进化过程的、被称为“进化算法(evolutionary algorithm)”的随机优化技术在解这 类优化难题中显示了优于传统优化算法的性能。目前,进化算法主要包括三个研究领域:遗传算法、进化规划和进化策略。其中遗传算法是迄今为止进化算法中应用最多、比较成熟、广为人知的算法。 一、遗传算法简介 遗传算法(Genetic Algorithm, GA)最先是由美国Mic-hgan大学的John Holland于1975年提出的。遗传算法是模拟达尔文的遗传选择和自然淘汰的生物进化过程的计算模型。它的思想源于生物遗传学和适者生存的自然规律,是具有“生存+检测”的迭代过程的搜索算法。遗传算法以一种群体中的所有个体为对象,并利用随机化技术指导对一个被编码的参数空间进行高效搜索。其中,选择、交叉和变异构成了遗传算法的遗传操作;参数编码、初始群体的设定、适应度函数的设计、遗传操作设计、控制参数设定等5个要素组成了遗传算法的核心内容。 遗传算法的基本步骤: 遗传算法是一种基于生物自然选择与遗传机理的随机搜索算法,与传统搜索算法不同,遗传算法从一组随机产生的称为“种群(Population)”的初始解开始搜索过程。种群中的每个个体是问题的一个解,称为“染色体(chromosome)”。染色体是一串符号,比如一个二进制字符串。这些染色体在后续迭代中不断进化,称为遗传。在每一代中用“适值(fitness)” 来测量染色体的好坏,生成的下一代染色体称为后代(offspring)。后代是由前一代染色体通过交叉(crossover)或者变异(mutation)运算形成的。在新一代形成过程中,根据适度的大小选择部分后代,淘汰部分后代。从而保持种群大小是常数。适值高的染色体被选中的概率较高,这样经过若干代之后,算法收敛于最 好的染色体,它很可能就是问题的最优解或次优解。 主要步骤如下所示: (1)编码:GA在进行搜索之前先将解空间的解数据表示成遗传空间的基因型串结构数据,这些串结构数据的不同组 合便构成了不同的点。 (2)初始群体的生成:随机产生N个初始串结构数据,每个串结构数据称为一个个体,N个个体构成了—个群体。GA 以这N个串结构数据作为初始点开始迭代。 (3)适应性值评估检测:适应性函数表明个体或解的优劣性。对于不同的问题,适应性函数的定义方式也不同。 (4)选择:选择的目的是为了从当前群体个选出优良的个体,使它们有机会作为父代为下一代繁殖子孙。遗传算法通 过选择过程体现这一思想,进行选择的原则是适应性强的个体为下一代贡献一个或多个后代的概率大。选择实现了
遗传算法在机器人路径规划中的应用
中国网络大学CHINESE NETWORK UNIVERSITY 毕业设计(论文) 院系名称:百度网络学院 专业:百度 学生姓名:百度 学号:123456789 指导老师:百度 中国网络大学教务处制
2019年3月1日
遗传算法在机器人路径规划中的应用 摘要 移动机器人路径规划作为自主式移动机器人技术的一个重要组成部分,是研究移动机器人技术较为活跃的课题之一,吸引了国内外大批的研究学者。随着各种新方法和新技术的不断出现,对路径规划的研究有了更广阔的天地。我国在智能移动机器人研究方面虽然已经取得了一定的成果,如地面自主导航车、水下自主机器人和飞行机器人等。但由于起步较晚,在研究和应用方面都落后于一些西方国家,而且还没有达到完全实用。因此,进行这项研究,具有一定的理论和工程应用意义。首先从移动机器人的历史和现状出发,对比了国内外的不同发展状况,对移动机器人领域的研究方向进行了综述。着重介绍了移动机器人路径规划中常用的方法,对栅格法、遗传算法等进行了逐一的分析阐述。 应用于机器人路径规划的有很多传统的优化方法,本文主要介绍的最基本的一种算法-遗传算法在机器人路径规划中的应用。遗传算法(简称GA)是一种借鉴生物界自然选择和自然遗传机制的随机化的搜索算法,它将“适者生存”这一基本的达尔文进化理论引入串结构,并且在串之间进行有组织但又随机的信息交换,伴随着算法的进行,优良的品质被逐渐保留并加以组合,从而不断产生出更佳的个体,也就是不断地接近于最优解。 本文采取了栅格法对机器人工作空间进行划分,用序号标识栅格,并以此序号作为机器人路径规划参数编码。同时引入间断无障碍路径概念以简化初始种群产生,而且采用了遗传算法操作对初始路径进行寻优,这里遗传算法操作主要指的是选择操作、交叉操作、变异操作;寻优主要是选取适当的个体评价函数及适应函数对路径进行寻优。最后采用MATLAB对机器人路径进行仿真,静态显示进化过程中生成的路径并显示机器人在障碍物存在情况下避障的运动过程。对不同参数设置下的路径进行比较,不同种群大小的适应度值进行统计分析,并将不同环境下的最佳路径与最差路径作比较。传统优化方法在机器人路径规划这类复杂非线性优化问题中缺乏足够的鲁棒性。遗传算法是国际上80年代中期以来获得广泛应用的一种新型参数优化方法,它基于自然选择原理和群体进化机制,有许多区别于传统优化方法的特点,对机器人路径寻优效果更明显。 关键词 遗传算法,机器人,路径规划,优化
遗传算法在多目标优化的应用:公式,讨论,概述总括
遗传算法在多目标优化的应用:公式,讨论,概述/总括 概述 本文主要以适合度函数为基础的分配方法来阐述多目标遗传算法。传统的群落形成方法(niche formation method)在此也有适当的延伸,并提供了群落大小界定的理论根据。适合度分配方法可将外部决策者直接纳入问题研究范围,最终通过多目标遗传算法进行进一步总结:遗传算法在多目标优化圈中为是最优的解决方法,而且它还将决策者纳入在问题讨论范围内。适合度分配方法通过遗传算法和外部决策者的相互作用以找到问题最优的解决方案,并且详细解释遗传算法和外部决策者如何通过相互作用以得出最终结果。 1.简介 求非劣解集是多目标决策的基本手段。已有成熟的非劣解生成技术本质上都是以标量优化的手段通过多次计算得到非劣解集。目前遗传算法在多目标问题中的应用方法多数是根据决策偏好信息,先将多目标问题标量化处理为单目标问题后再以遗传算法求解,仍然没有脱离传统的多目标问题分步解决的方式。在没有偏好信息条件下直接使用遗传算法推求多目标非劣解的解集的研究尚不多见。 本文根据遗传算法每代均产生大量可行解和隐含的并行性这一特点,设计了一种基于排序的表现矩阵测度可行解对所有目标总体表现好坏的向量比较方法,并通过在个体适应度定标中引入该方法,控制优解替换和保持种群多样性,采用自适应变化的方式确定交叉和变异概率,设计了多目标遗传算法(Multi Objective Genetic Algorithm, MOGA)。该算法通过一次计算就可以得到问题的非劣解集, 简化了多目标问题的优化求解步骤。 多目标问题中在没有给出决策偏好信息的前提下,难以直接衡量解的优劣,这是遗传算法应用到多目标问题中的最大困难。根据遗传算法中每一代都有大量的可行解产生这一特点,我们考虑通过可行解之间相互比较淘汰劣解的办法来达到最 后对非劣解集的逼近。 考虑一个n维的多目标规划问题,且均为目标函数最大化, 其劣解可以定义为: f i (x * )≤f i (x t ) i=1,2,??,n (1) 且式(1)至少对一个i取“<”。即至少劣于一个可行解的x必为劣解。 对于遗传算法中产生大量的可行解,我们考虑对同一代中的个体基于目标函数相互比较,淘汰掉确定的劣解,并以生成的新解予以替换。经过数量足够大的种群一定次数的进化计算,可以得到一个接近非劣解集前沿面的解集,在一定精度要求下,可以近似的将其作为非劣解集。 个体的适应度计算方法确定后,为保证能得到非劣解集,算法设计中必须处理好以下问题:(1)保持种群的多样性及进化方向的控制。算法需要求出的是一组不同的非劣解,所以计算中要防止种群收敛到某一个解。与一般遗传算法进化到
车辆路径问题及遗传算法
车辆路径问题优化算法 美国物流管理学会(Council of Logistics Management,CLM)对物流所作的定义为:“为符合顾客的需要,对原料、制造过程中的存货与制成品以及相关信息,从其起运点至最终消费点之间,做出的追求效率与成本效果的计划、执行与控制过程。” 而有关资料显示,物流配送过程(包含仓储、分拣、运输等)的成本构成中,运输成本占到52%之多。因此,如何在满足客户适当满意度的前提下,将配送的运输成本合理地降低,成为一个紧迫而重要的研究课题,车辆路径问题正是基于这一需求而产生的。 2.1车辆路径问题的定义 车辆路径问题可以描述为:给定一组有容量限制的车辆的集合、一个物流中心(或供货地)、若干有供货需求的客户,组织适当的行车路线,使车辆有序地通过所有的客户,在满足一定的约束条件(如需求量、服务时间限制、车辆容量限制、行驶里程限制等)下,达到一定的目标(如路程最短、费用极小、时间尽量少、使用车辆数尽量少等)。[4] 因此研究车辆的路径问题,就是要研究如何安排运输车辆的行驶路线,使运输车辆依照最短的行驶路径或最短的时间费用,依次服务于每个客户后返回起点,总的运输成本实现最小。车辆路径问题已被证明是NP-Hard问题,因此求解比较困难。然而,由于其在现实生活中应用非常广泛,使得它无论在理论上还是在实践上都有极大的研究价值。 Penousal Machado等人[5]指出车辆路径问题(vehicle routing problem,简称VRP)是一个复杂的组合优化问题,是古老的旅行商问题和背包问题的综合。实际上,车辆路径问题通常可被分解或转化成一个或几个已经研究过的基本问题,再采用相应比较成熟的基本理论和方法,以得到最优解或满意解。 这些与车辆路径问题相关的常用基本问题有;旅行商问题、运输问题、背包问题、最短路问题、最小费用最大流问题、中国邮路问题、指派问题等。 旅行商问题可被描述为:一个推销员欲到n个城市推销商品,每2个城市之间的距离是已知的。如何选择一条路径使推销员依次又不重复地走遍每个城市后,回到起点且所走的路径最短。 运输问题关心的是(确实的或是比喻的)以最低的总配送成本把供应中心(称为出发地,sources)的任何产品运送到每一个接受中心(称为目的地,destinations)。运输问题需要的数据仅仅是供应量、需求量和单位成本。 背包问题是指有一只固定容量的背包和若干体积、重量不等的物品,背包的容量不允许装下这所有的物品,那么如何选择适当的物品装入背包,使得背包的装载量(所装物品的重量之和)最大。 最短路径问题解决的是在一个网络中,如何寻找两点之间的最短路径。这两点之间通常没有直接的通路可达,但可经由若干中间结点相通。 最小费用流问题主要解决如何以最小成本在一个配送网络中运输货物。最小费用流问题又称为网络配送问题。 最大流问题和最小费用流问题一样,也与网络中的流有关。但是它们的目标不同,最大流问题不是使得流的成本最小化,而是寻找一个流的方案,使得通过网络的流量最大。 中国邮路问题是由我国管梅谷同志在1962年首先提出的,它可描述为:一个邮递员负责某一个地区的信件投递。每天要从邮局出发,走遍该地区所有的街道再返回邮局,问应该怎样安排送信路线可以使所走的路程最短。 指派问题解决将n件工作安排给m个人完成的问题。已知不同人完成不同工作的效率(或成本)不同,指派问题要求以最高的效率(或最小的人工成本)完成工作的安排。 2.2车辆路径问题的分类
遗传算法与优化问题(重要,有代码)
实验十遗传算法与优化问题 一、问题背景与实验目的 遗传算法(Genetic Algorithm—GA),是模拟达尔文的遗传选择和自然淘汰的生物进化过程的计算模型,它是由美国Michigan大学的J.Holland教授于1975年首先提出的.遗传算法作为一种新的全局优化搜索算法,以其简单通用、鲁棒性强、适于并行处理及应用范围广等显著特点,奠定了它作为21世纪关键智能计算之一的地位. 本实验将首先介绍一下遗传算法的基本理论,然后用其解决几个简单的函数最值问题,使读者能够学会利用遗传算法进行初步的优化计算.1.遗传算法的基本原理 遗传算法的基本思想正是基于模仿生物界遗传学的遗传过程.它把问题的参数用基因代表,把问题的解用染色体代表(在计算机里用二进制码表示),从而得到一个由具有不同染色体的个体组成的群体.这个群体在问题特定的环境里生存竞争,适者有最好的机会生存和产生后代.后代随机化地继承了父代的最好特征,并也在生存环境的控制支配下继续这一过程.群体的染色体都将逐渐适应环境,不断进化,最后收敛到一族最适应环境的类似个体,即得到问题最优的解.值得注意的一点是,现在的遗传算法是受生物进化论学说的启发提出的,这种学说对我们用计算机解决复杂问题很有用,而它本身是否完全正确并不重要(目前生物界对此学说尚有争议). (1)遗传算法中的生物遗传学概念 由于遗传算法是由进化论和遗传学机理而产生的直接搜索优化方法;故而在这个算法中要用到各种进化和遗传学的概念. 首先给出遗传学概念、遗传算法概念和相应的数学概念三者之间的对应关系.这些概念如下: 序号遗传学概念遗传算法概念数学概念 1 个体要处理的基本对象、结构也就是可行解 2 群体个体的集合被选定的一组可行解 3 染色体个体的表现形式可行解的编码 4 基因染色体中的元素编码中的元素 5 基因位某一基因在染色体中的位置元素在编码中的位置 6 适应值个体对于环境的适应程度, 或在环境压力下的生存能力可行解所对应的适应函数值 7 种群被选定的一组染色体或个体根据入选概率定出的一组 可行解 8 选择从群体中选择优胜的个体, 淘汰劣质个体的操作保留或复制适应值大的可行解,去掉小的可行解 9 交叉一组染色体上对应基因段的 交换根据交叉原则产生的一组新解 10 交叉概率染色体对应基因段交换的概 率(可能性大小)闭区间[0,1]上的一个值,一般为0.65~0.90 11 变异染色体水平上基因变化编码的某些元素被改变
遗传算法在多目标优化中的作用 调研报告
遗传算法在多目标优化中的作用调研报告 姓名: 学院: 班级: 学号: 完成时间:20 年月日 目录 1 .课题分析................................................................................................................................ 0 2 .检索策略................................................................................................................................ 0 2.1 检索工具的选择................................................................................................................................ ......... 0 2.2 检索词的选择................................................................................................................................ ............. 0 2.3 通用检索式................................................................................................................................ .. 0 3.检索步骤及检索结果 0 3.1 维普中文科技期刊数据库 0 3.2 中国国家知识产权局数据
粒子群算法和遗传算法比较
粒子群算法和遗传算法比较 优化问题是工业设计中经常遇到的问题,许多问题最后都可以归结为优化问题. 为了解决各种各样的优化问题,人们提出了许多优化算法,比较著名的有爬山法、遗传算法等.优化问题有两个主要问题:一是要求寻找全局最小点,二是要求有较高的收敛速度. 爬山法精度较高,但是易于陷入局部极小. 遗传算法属于进化算法( Evolutionary Algorithms) 的一种,它通过模仿自然界的选择与遗传的机理来寻找最优解. 遗传算法有三个基本算子:选择、交叉和变异. 但是遗传算法的编程实现比较复杂,首先需要对问题进行编码,找到最优解之后还需要对问题进行解码,另外三个算子的实现也有许多参数,如交叉率和变异率,并且这些参数的选择严重影响解的品质,而目前这些参数的选择大部分是依靠经验.1995 年Eberhart 博士和kennedy 博士提出了一种新的算法;粒子群优化(Partical Swarm Optimization -PSO) 算法. 这种算法以其实现容易、精度高、收敛快等优点引起了学术界的重视,并且在解决实际问题中展示了其优越性。 粒子群算法 1. 引言 粒子群优化算法(PSO)是一种进化计算技术(evolutionary computation),有Eberhart博士和kennedy博士发明。源于对鸟群捕食的行为研究,PSO同遗传算法类似,是一种基于叠代的优化工具。系统初始化为一组随机解,通过叠代搜寻最优值。但是并没有遗传算法用的交叉(crossover)以及变异(mutation)。而是粒子在解空间追随最优的粒子进行搜索。详细的步骤以后的章节介绍 同遗传算法比较,PSO的优势在于简单容易实现并且没有许多参数需要调整。目前已广泛应用于函数优化,神经网络训练,模糊系统控制以及其他遗传算法的应用领域 2. 背景: 人工生命 "人工生命"是来研究具有某些生命基本特征的人工系统. 人工生命包括两方面的内容 1. 研究如何利用计算技术研究生物现象 2. 研究如何利用生物技术研究计算问题 我们现在关注的是第二部分的内容. 现在已经有很多源于生物现象的计算技巧. 例如, 人工神经网络是简化的大脑模型. 遗传算法是模拟基因进化过程的. 现在我们讨论另一种生物系统- 社会系统. 更确切的是, 在由简单个体组成的群落与环境以及个体之间的互动行为. 也可称做"群智能"(swarm intelligence). 这些模拟系统利用局部信
基于改进遗传算法的路径规划MATLAB实现
基于改进遗传算法的路径规划MATLAB实现
基于遗传算法的路径规划MATLAB实现 主程序: clear all; close all; t=23; %过程点个数=t-1 s=500; %种群规模 pc=0.90; %交叉概率 pm=0.20; %变异概率 pop=zeros(s,t); for i=1:s pop(i,1:t-1)=randperm(t-1); end for k=1:1:2000 %进化代次数k if mod(k,10)==1 k end pop=lujingdis(pop); c=15;%选择淘汰个数 pop=lujingselect(pop,c); p=rand; if p>=pc pop=lujingcross(pop); end if p>=pm pop=lujingmutate(pop); End end pop min(pop(:,t)) J=pop(:,t); fi=1./J;
[Oderfi,Indexfi]=sort(fi); %安排fi从小到大 BestS=pop(Indexfi(s),:); %使BestS=E(m),m即是属于max(fi)的Indexfi I=BestS; x=[2 3 6 10 14 17 22 20 23 25 30 28 25 21 29 16 18 15 9 11 6 5 ]; y=[5 26 14 29 27 24 28 22 26 30 30 17 13 15 4 13 3 1 6 2 2 7]; %过程点坐标 % x=[1 2 3 4 6 9 11 10 8 9 6 4]; %12个过程点的坐标 % y=[1 2 3 4 8 10 11 9 5 2 1 2]; for i=1:1:t-1 x1(i)=x(I(i)); y1(i)=y(I(i)); end x(t)=x(I(1)); y(t)=y(I(1)); a = [1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 0 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
遗传算法的流程图
一需求分析 1.本程序演示的是用简单遗传算法随机一个种群,然后根据所给的交叉率,变异率,世代数计算最大适应度所在的代数 2.演示程序以用户和计算机的对话方式执行,即在计算机终端上显示“提示信息”之后,由用户在键盘上输入演示程序中规定的命令;相应的输入数据和运算结果显示在其后。3.测试数据 输入初始变量后用y=100*(x1*x1-x2)*(x1*x2-x2)+(1-x1)*(1-x1)其中-2.048<=x1,x2<=2.048作适应度函数求最大适应度即为函数的最大值 二概要设计 1.程序流程图 2.类型定义 int popsize; //种群大小 int maxgeneration; //最大世代数 double pc; //交叉率 double pm; //变异率 struct individual
{ char chrom[chromlength+1]; double value; double fitness; //适应度 }; int generation; //世代数 int best_index; int worst_index; struct individual bestindividual; //最佳个体 struct individual worstindividual; //最差个体 struct individual currentbest; struct individual population[POPSIZE]; 3.函数声明 void generateinitialpopulation(); void generatenextpopulation(); void evaluatepopulation(); long decodechromosome(char *,int,int); void calculateobjectvalue(); void calculatefitnessvalue(); void findbestandworstindividual(); void performevolution(); void selectoperator(); void crossoveroperator(); void mutationoperator(); void input(); void outputtextreport(); 4.程序的各函数的简单算法说明如下: (1).void generateinitialpopulation ()和void input ()初始化种群和遗传算法参数。 input() 函数输入种群大小,染色体长度,最大世代数,交叉率,变异率等参数。 (2)void calculateobjectvalue();计算适应度函数值。 根据给定的变量用适应度函数计算然后返回适度值。 (3)选择函数selectoperator() 在函数selectoperator()中首先用rand ()函数产生0~1间的选择算子,当适度累计值不为零时,比较各个体所占总的适应度百分比的累计和与选择算子,直到达到选择算子的值那个个体就被选出,即适应度为fi的个体以fi/∑fk的概率继续存在; 显然,个体适应度愈高,被选中的概率愈大。但是,适应度小的个体也有可能被选中,以便增加下一代群体的多样性。 (4)染色体交叉函数crossoveroperator() 这是遗传算法中的最重要的函数之一,它是对个体两个变量所合成的染色体进行交叉,而不是变量染色体的交叉,这要搞清楚。首先用rand ()函数产生随机概率,若小于交叉概率,则进行染色体交叉,同时交叉次数加1。这时又要用rand()函数随机产生一位交叉位,把染色
基于遗传算法的配送路径优化研究开题报告
北京师范大学珠海分校 本科生毕业论文(设计)开题报告
理论和实践的意义及可行性论述 (包括文献综述) 理论和实践的意义:当前,现代物流是企业继续降低物资消耗、提高劳动生产 率后的第三利润源泉。但我国物流企业的运输成本普遍偏高。其中很重要一个 原因就是对配送车辆运输路线规划不科学。要想降低运输成本,离不开对配送 路线的优化和配送车辆的合理安排。对物流配送车辆行驶路径进行优化,可以降低物流成本,节约运输时间,是提高物流经济效益的有效手段。 可行性论述:配送路径优化问题是典型的优化组合问题,具有很高的计算复杂 性。但遗传算法解决作为一种有效的全局搜索方法具有隐并行性和较强的鲁棒性,在解决非线性的大规模复杂问题上具有很好的适应性,适合于对VPR问 题进行优化求解。标准遗传算法虽然未必每次都能找到最优解,但通过对标准 遗传算法进行改进,完全可以在有限时间内对较复杂的VPR问题计算出次优 解或可行解。因此,用遗传算法来解决物流车辆调度问题还是完全可行的。 文献综述: [1]朱剑英?非经典数学方法[M].武昌:华中科技大学出版社,2001 [2]李敏强,寇纪淞,林丹,李书全?遗传算法的基本理论与应用[M].北京:科 学技术出版社,2002 [3]孙丽丽?物流配送中车辆路径算法分析与研究[D].上海:上海海事大学,2007 [4]盖杉.基于遗传算法的物流配送调度系统 [D].长春:长春理工大学,2007 [5]高运良,基于免疫遗传算法的物流配送V RP 求解[D].武汉:武汉科技大学, 2007 论文撰写过程中拟采取的方法和手段 本论文主要采用遗传算法作为解决物流配送路径优化问题的主要算法。但由于标准遗传算法具有“早熟收敛”的缺陷,有可能使算法陷入局部最优解。论文还将尝试通过把其他算法和遗传算法相结合,来有效控制早熟现象的发生。为了快速得到任意两个配送点之间的最优路线。本论文还拟采用佛洛依德 算法构造配送路线的地理数据库的方式来对路线网络进行预处理。从而减少整 个算法的时间复杂度和空间复杂度。
遗传算法解决TSP问题
遗传算法解决TSP问题 姓名: 学号: 专业:
问题描叙 TSP问题即路径最短路径问题,从任意起点出发(或者固定起点),依次经过所有城市,一个城市只能进入和出去一次,所有城市必须经过一次,经过终点再到起点,从中寻找距离最短的通路。 通过距离矩阵可以得到城市之间的相互距离,从距离矩阵中的到距离最短路径,解决TSP问题的算法很多,如模拟退火算法,禁忌搜索算法,遗传算法等等,每个算法都有自己的优缺点,遗传算法收敛性好,计算时间少,但是得到的是次优解,得不到最有解。 算法设计 遗传算法属于进化算法的一种,它通过模仿自然界的选择与遗传的机理来寻找最优解. 遗传算法有三个基本算子:选择、交叉和变异。 数值方法求解这一问题的主要手段是迭代运算。一般的迭代方法容易陷入局部极小的陷阱而出现"死循环"现象,使迭代无法进行。遗传算法很好地克服了这个缺点,是一种全局优化算法。 生物在漫长的进化过程中,从低等生物一直发展到高等生物,可以说是一个绝妙的优化过程。这是自然环境选择的结果。人们研究生物进化现象,总结出进化过程包括复制、杂交、变异、竞争和选择。一些学者从生物遗传、进化的过程得到启发,提出了遗传算法。算法中称遗传的生物体为个体,个体对环境的适应程度用适应值(fitness)表示。适应值取决于个体的染色体,在算法中染色体常用一串数字表示,数字串中的一位对应一个基因。一定数量的个体组成一个群体。对所有个体进行选择、交叉和变异等操作,生成新的群体,称为新一代遗传算法计算程序的流程可以表示如下: 第一步准备工作 (1)选择合适的编码方案,将变量(特征)转换为染色体(数字串,串长为m)。通常用二进制编码。 (2)选择合适的参数,包括群体大小(个体数M)、交叉概率PC和变异概率Pm。 (3)确定适应值函数f(x)。f(x)应为正值。 第二步形成一个初始群体(含M个个体)。在边坡滑裂面搜索问题中,取已分析的可能滑裂面组作为初始群体。 第三步对每一染色体(串)计算其适应值fi,同时计算群体的总适应值。 第四步选择
遗传算法与机器人路径规划
遗传算法与机器人路径规划 摘要:机器人的路径规划是机器人学的一个重要研究领域,是人工智能和机器人学的一个结合点。对于移动机器人而言,在其工作时要求按一定的规则,例如时间最优,在工作空间中寻找到一条最优的路径运动。机器人路径规划可以建模成在一定的约束条件下,机器人在工作过程中能够避开障碍物从初始位置行走到目标位置的路径优化过程。遗传算法是一种应用较多的路径规划方法,利用地图中的信息进行路径规划,实际应用中效率比较高。 关键词:路径规划;移动机器人;避障;遗传算法 Genetic Algorithm and Robot Path Planning Abstract: Robot path planning research is a very important area of robotics, it is also a combine point of artificial intelligence and robotics. For the mobile robot, it need to be worked by certain rulers(e.g time optimal),and find a best movement path in work space. Robot path planning can be modeled that in the course of robots able to avoid the obstacles from the initial position to the target location,and it ruquire to work under ertain constraints. Genetic algorithm used in path planning is very common, when planning the path ,it use the information of map ,and have high eficient in actual. Key words: Path planning,mobile robot, avoid the obstacles, genetic algorithm 1路径规划 1.1机器人路径规划分类 (1)根据机器人对环境信息掌握的程度和障碍物的不同,移动机器人的路径规划基本上可分为以下几类: 1,已知环境下的对静态障碍物的路径规划; 2,未知环境下的对静态障碍物的路径规划; 3,已知环境下对动态障碍物的路径规划; 4,未知环境下的对动态障碍物的路径规划。 (2)也可根据对环境信息掌握的程度不同将移动机器人路径规划分为两种类型: 1,基于环境先验完全信息的全局路径规划; 2,基于传感器信息的局部路径规划。 (第二种中的环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。) 1.2路径规划步骤 无论机器人路径规划属于哪种类别,采用何种规划算法,基本上都要遵循以下步骤: 1, 建立环境模型,即将现实世界的问题进行抽象后建立相关的模型; 2, 路径搜索方法,即寻找合乎条件的路径的算法。 1.3路径规划方法
多目标规划遗传算法
%遗传算法解决多目标函数规划 clear clc syms x; %Function f1=f(x) f1=x(:,1).*x(:,1)/4+x(:,2).*x(:,2)/4; %function f2=f(x) f2=x(:,1).*(1-x(:,2))+10; NIND=100; MAXGEN=50; NV AR=2; PRECI=20; GGPA=0.9; trace1=[]; trace2=[]; trace3=[]; FielD=[rep([PRECI],[1,NV AR]);[1,1;4,2];rep([1;0;1;1],[NV AR])]; Chrom=crtbp(NIND,NV AR*PRECI); v=bs2rv(Chrom,FielD); gen=1; while gen 最近在看遗传算法,查了很多资料,所以做了如下一些总结,也希望对后面研究的人有些帮助.因为初学GA,文中自己的见解,不一定全对,感兴趣的可以一起探讨. I简介 基本概念 遗传算法(Genetic Algorithms, GA)是一类借鉴生物界自然选择和自然遗传机制的随机化搜索算法。 它模拟自然选择和自然遗传过程中发生的繁殖、交叉和基因突变现象,在每次迭代中都保留一组候选解,并按某种指标从解群中选取较优的个体,利用遗传算子(选择、交叉和变异)对这些个体进行组合,产生新一代的候选解群,重复此过程,直到满足某种收敛指标为止。 GA的组成: (1)编码(产生初始种群) (2)适应度函数 (3)遗传算子(选择、交叉、变异) (4)运行参数 编码 基因在一定能够意义上包含了它所代表的问题的解。基因的编码方式有很多,这也取决于要解决的问题本身。常见的编码方式有: (1)二进制编码,基因用0或1表示(常用于解决01背包问题) 如:基因A:00100011010 (代表一个个体的染色体) (2)互换编码(用于解决排序问题,如旅行商问题和调度问题) 如旅行商问题中,一串基因编码用来表示遍历的城市顺序,如:234517986,表示九个城市中,先经过城市2,再经过城市3,依此类推。 (3)树形编码(用于遗传规划中的演化编程或者表示) 如,问题:给定了很多组输入和输出。请你为这些输入输出选择一个函数,使得这个函数把每个输入尽可能近地映射为输出。 编码方法:基因就是树形结构中的一些函数。 (4)值编码(二进制编码不好用时,解决复杂的数值问题) 在值编码中,每个基因就是一串取值。这些取值可以是与问题有关任何值:整数,实数,字符或者其他一些更复杂的东西。 适应度函数 遗传算法对一个个体(解)的好坏用适应度函数值来评价,适应度函数值越大,解的质量越好。适应度函数是遗传算法进化过程的驱动力,也是进行自然选择的唯一标准,它的设计应结合求解问题本身的要求而定。 如TSP问题,遍历各城市路径之和越小越好,这样可以用可能的最大路径长度减去实际经过的路径长度,作为该问题的适应度函数。 遗传算子——选择 遗传算法使用选择运算来实现对群体中的个体进行优胜劣汰操作:适应度高的个体被遗传到下一代群体中的概率大;适应度低的个体,被遗传到下一代群体中的概率小。选择操作的任务就是按某种方法从父代群体中选取一些个体,遗传到下一代群体。 SGA(基本遗传算法)中采用轮盘赌选择方法。 轮盘赌选择又称比例选择算子,基本思想:各个个体被选中的概率与其适应度函数值大小成正比。设群体大小为n ,个体i 的适应度为Fi,则个体i 被选中遗传到下一代群体的概率为: 遗传算子——交叉 所谓交叉运算,是指对两个相互配对的染色体依据交叉概率按某种方式相互交换其部分基因,从而形成两个新的个体。交叉运算在GA中起关键作用,是产生新个体的主要方法。 毕业设计 题目基于遗传算法的物流配送路径优化分析学生姓名 学号 专业 班级 指导教师 二 0 0 九年十月 目录 (空一行) 摘要 (ⅰ) 一、引言(问题的提出) (1) 二、物流配送路径优化问题的数学模型……………………………X 三、物流配送路径优化问题的遗传算法……………………………X (一)遗传算法的差不多要素………………………………………X (二)物流配送路径优化问题的遗传算法的构造……………………X 四、实验计算与结果分析…………………………………………X 五、结论…………………………………………………………X 参考文 献…………………………………………………………X 致谢………………………………………………………………X 摘要:论文在建立物流配送路径优化问题的数学模型的基础上,构造了求解该问题的遗传算法,并进行了实验计算。计算结果表明,用遗传算法进行物流配送路径优化,能够方便有效地求得问题的最优解或近似最优解。 关键词:物流配送;遗传算法;优化 Study on the Optimizing of Physical Distribution Routing Problem Based on Genetic Algorithm Abstract:On the basis of establishing the optimizing model on physical distribution routing problem, this paper presents a genetic algorithm for solving this problem, and make some experimental calculations. The experimental calculation results demonstrates that the optimal or nearly optimal solutions to the physical distribution routing problem can be easily obtained by using genetic algorithm. Keywords:physical distribution;genetic algorithm;optimizing 介绍遗传算法的发展历程 遗传算法起源于对生物系统进行的计算机模拟研究。早在20世纪40年代,就有学者开始研究利用计算机进行生物模拟的技术,他们从生物学的角度进行了生物的进化过程模拟、遗传过程模拟等研究工作。 早期的研究特点是侧重于对一些复杂操作的研究。最早意识到自然遗传算法可以转化为人工智能算法的是J.H.Hnllaad教授。1965年,Holland教授首次提出了人工智能操作的重要性,并将其应用到自然系统和人工系统中。1967年,Holland教授的学生.J.D.Bagley在其博士论文中首次提出了“遗传算法”一词,并发表了遗传算法应用方面的第一篇论文,从而创立了自适应遗传算法的概念e J.D.Bagley发展了复制、交叉、变异、显性、倒位等遗传算子,在个体编码上使用了双倍体的编码方法。1970年,Cavicchio把遗传算法应用于模式识别。Holistien最早把遗传算法应用于函数优化。20世纪70年代初,Holland 教授提出了遗传算法的基本定理—模式定理,从而奠定了遗传算法的理论基础。模式定理揭示出种群中优良个体(较好的模式)的样本数将以指数级规律增长,因而从理论上保证了遗传算法是一个可以用来寻求最优可行解的优化过程。1975年,Holland教授出版了第一本系统论述遗传算法和人工自适应系统的专著《自然系统和人工系统的自适应性》。同年,K.A.De Song在博士论文《遗传自适应系统的行为分析》‘护结合模式定理进行了大量的纯数值函数优化计算实验,建立了遗传算法的工作框架,为遗传算法及其应用打下了坚实的基础,他所得 出的许多结论迄今仍具有普遍的指导意义。20世纪80年代,Hntland 教授实现了第一个基于遗传算法的机器学习系统—分类器系统(Classifier Systems,简称CS),提出了基于遗传算法的机器学习的新概念,为分类器系统构造出了一个完整的框架。1989年,D.J.Goldberg 出版了专著—《搜索、优化和机器学习中的遗传算法》。该书系统总结了遗传算法的主要研究成果,全面而完整地论述了遗传算法的基本原理及其应用。可以说这本书奠定了现代遗传算法的科学基础,为众多研究和发展遗传算法的学者所瞩目。1991年,L,Davis编辑出版了《遗传算法手册》一书,书中包括了遗传算法在科学计算、工程技术和社会经济中的大量应用样本,为推广和普及遗传算法的应用起到了重要的指导作用。1992年,J.R.Koza将遗传算法应用于计算机程序的优化设计及自动生成,提出了遗传规划(Genetic Programming,简称GP)的概念。遗传算法心得
基于遗传算法的物流配送路径优化分析
介绍遗传算法的发展历程