实验报告8 顺序动作回路的安装、调试(气动)

1 / 2
实验报告8 顺序动作回路的安装、调试(气动)
一、操作要求
掌握双作用气缸、2位四通电磁换向阀、行程开关的基础结构、符号,掌握顺序动作回路的安装,掌握PLC 程序的调试。 二、主要器件
气动实验台(1台),连接气管(按需),计算机(1台)。 三、操作步骤
1、熟悉双作用气缸、单向节流阀、二位四通电磁换向阀基本结构
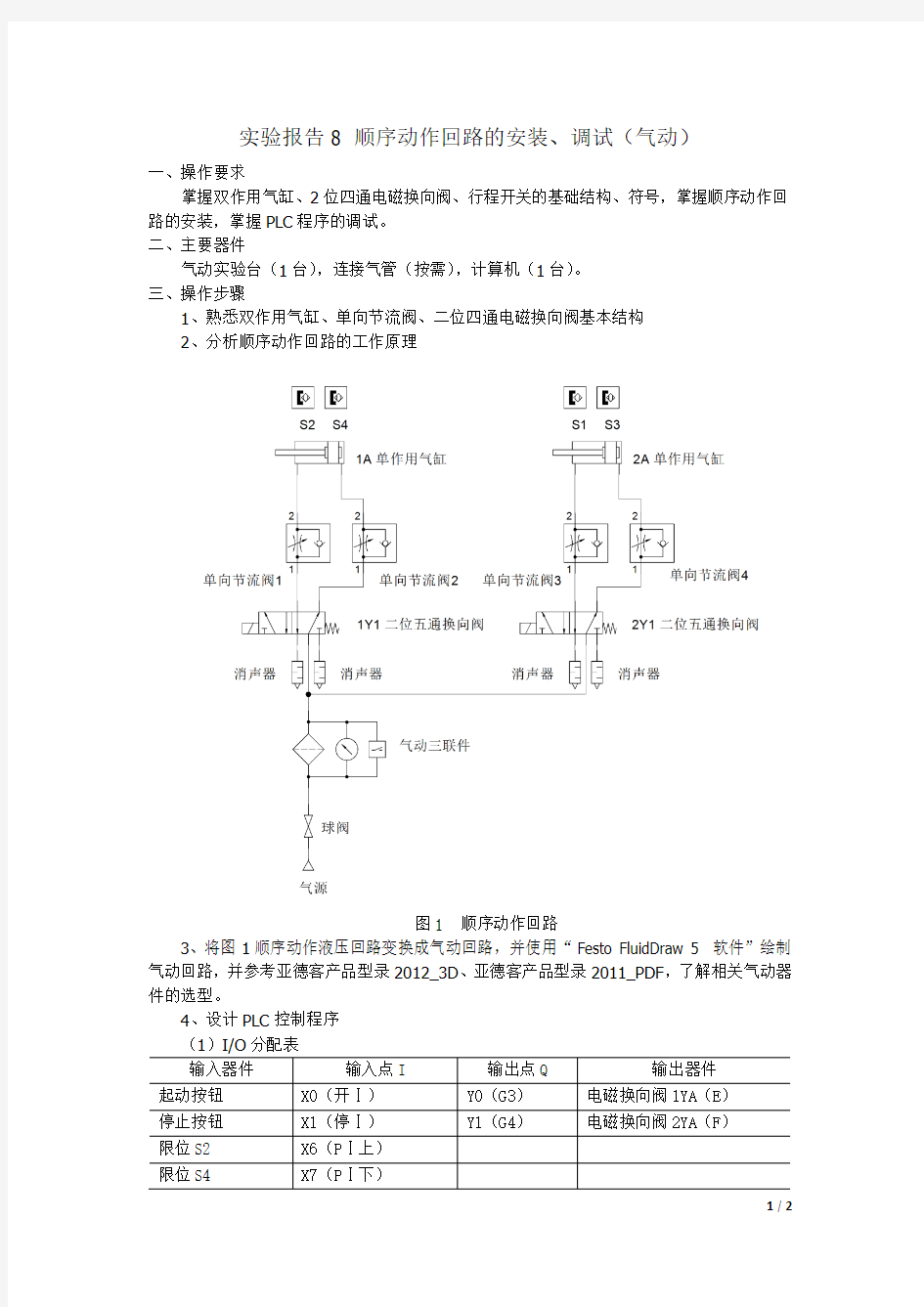
2、分析顺序动作回路的工作原理
图1 顺序动作回路
3、将图1顺序动作液压回路变换成气动回路,并使用“Festo FluidDraw 5 软件”绘制气动回路,并参考亚德客产品型录2012_3D 、亚德客产品型录2011_PDF ,了解相关气动器件的选型。
4、设计PLC 控制程序 (1)I/O 分配表
输入器件 输入点I 输出点Q 输出器件
起动按钮 X0(开Ⅰ) Y0(G3) 电磁换向阀1YA (E ) 停止按钮 X1(停Ⅰ) Y1(G4)
电磁换向阀2YA (F ) 限位S2 X6(P Ⅰ上) 限位S4
X7(P Ⅰ下)
2 / 2
限位S1 X10(PII 上)
限位S3
X11(PII 下)
(2)PLC 程序
5、顺序动作回路的安装、调试。 四、思考题
1、本实验使用行程开关来进行位置的检测,还可以使用什么器件对气缸的伸出、缩回的位置进行检测呢?
2、我们实验的过程中,发现气缸的动作顺序基本符合要求,但是步骤3中气缸A 还没有完全缩回,就执行步骤4将气缸B 缩回。故障原因可能是什么?如何解决呢?
参考答案:
1、磁性(感应)开关,但要求所选的气缸的活塞上附有磁石。
2、(1)PLC 程序、输出点动作很快,但电磁阀得电、断电,换向阀的切换需要时间,所以出现了以上的情况。(2)可以在PLC 程序中设置相关的定时器进行适当的延时。
实验三 双缸顺序动作回路实验
实验三双缸顺序动作回路实验 一、实验目的 1.学会使用换向阀、行程开关等液压元件来控制多个液压缸的顺序动作,加深对所学知识的理解与掌握; 2.培养使用各种液压元件进行系统回路的连接、安装和调试的操作能力; 3.进一步理解采用行程开关控制的顺序动作回路的工作原理及应用 二、实验内容 1.通过亲自装拆,了解液压元件及管路的正确连接与安装的方法。 2.了解顺序动作回路组成和性能。 三、实验基本原理 顺序动作回路的功用是使液压系统中的多个执行元件严格地按规定的顺序动作。按控制方式分为压力控制、行程控制和时间控制三类。 行程控制顺序动作回路,液压原理图见图1.3。工作过程见电磁铁动作表1.3,自动循环。
多缸顺序动作回路的工作原理为: 1.启动油泵,CT1通电,左换向阀处于左位,液压缸A中活塞向右运动,实现动作1; 2.缸A前进,活塞杆触头压下行程开关L2后,CT2通电,右换向阀处于左位,液压缸B中活塞向右运动,实现动作2; 3.缸B前进,活塞杆触头压下行程开关L3后,CT1断电,左换向阀恢复右位,液压缸A中活塞向左运动,实现动作3; 4.缸A退回,活塞杆触头压下行程开关L4后,CT2断电,右换向阀恢复右位,液压缸B中活塞向左运动,实现动作4; 5.缸B退回,活塞杆触头压下行程开关L1后,CT1通电,左换向阀处于左位,液压缸A中活塞向右运动,实现动作1; 6.二位二通电磁换向阀CT3通电,系统缸荷,液压缸停止工作。 采用行程开关控制多缸顺序动作回路的工作原理见图。工作过程见电磁铁动作表。 四、实验方法与步骤 1.实验方法: 本实验采用透明可视的液压元件和快速插装式的管路在液压实验台上完成。电气线路与控制按钮均在实验台,操作安全、控制方便。根据已学的液压回路的基本知识,选用正确的液压元件,在液压实验台上实现双缸的顺序动作。 2.实验步骤: (1)按照实验回路图的要求,取出要用的液压元件,检查型号是否正确。 (2)将检查完毕性能完好的液压元件安装在实验台面板合理位置。通过快
网络安全实验报告[整理版]
一Sniffer 软件的安装和使用 一、实验目的 1. 学会在windows环境下安装Sniffer; 2. 熟练掌握Sniffer的使用; 3. 要求能够熟练运用sniffer捕获报文,结合以太网的相关知识,分析一个自己捕获的以太网的帧结构。 二、实验仪器与器材 装有Windows操作系统的PC机,能互相访问,组成局域网。 三、实验原理 Sniffer程序是一种利用以太网的特性把网络适配卡(NIC,一般为以太同卡)置为杂乱模式状态的工具,一旦同卡设置为这种模式,它就能接收传输在网络上的每一个信息包。 四、实验过程与测试数据 1、软件安装 按照常规方法安装Sniffer pro 软件 在使用sniffer pro时需要将网卡的监听模式切换为混杂,按照提示操作即可。 2、使用sniffer查询流量信息: 第一步:默认情况下sniffer pro会自动选择网卡进行监听,手动方法是通过软件的file 菜单下的select settings来完成。 第二步:在settings窗口中我们选择准备监听的那块网卡,把右下角的“LOG ON”勾上,“确定”按钮即可。 第四步:在三个仪表盘下面是对网络流量,数据错误以及数据包大小情况的绘制图。 第五步:通过FTP来下载大量数据,通过sniffer pro来查看本地网络流量情况,FTP 下载速度接近4Mb/s。 第六步:网络传输速度提高后在sniffer pro中的显示也有了很大变化,utiliazation使用百分率一下到达了30%左右,由于我们100M网卡的理论最大传输速度为12.5Mb/s,所以4Mb/s刚好接近这个值的30%,实际结果和理论符合。 第七步:仪表上面的“set thresholds”按钮了,可以对所有参数的名称和最大显示上限进行设置。 第八步:仪表下的“Detail”按钮来查看具体详细信息。 第九步:在host table界面,我们可以看到本机和网络中其他地址的数据交换情况。
计算机网络ACL配置实验报告
计算机网络ACL配置实验报告 件)学院《计算机网络》综合性、设计性实验成绩单开设时间:xx学年第二学期专业班级学号姓名实验题目ACL自我评价本次ACL的实验,模拟实现了对ACL的配置。在实验中,理解ACL对某些数据流进行过滤,达到实现基本网络安全的目的的过程。我加深了对网络中安全的理解,如何控制非法地址访问自己的网络,以及为什么要进行数据过滤,对数据进行有效的过滤,可以使不良数据进入青少年中的视野,危害青少年的身心健康发展。该实验加深了我对网络的理解,同时加强了自身的动手能力,并将理论知识应用到实践当中。教师评语评价指标:l 题目内容完成情况优□ 良□ 中□ 差□l 对算法原理的理解程度优□ 良□ 中□ 差□l 程序设计水平优□ 良□ 中□ 差□l 实验报告结构清晰优□ 良□ 中□ 差□l 实验总结和分析详尽优□ 良□ 中□ 差□成绩教师签名目录 一、实验目的3 二、实验要求3 三、实验原理分析3 四、流程图5 五、配置过程 51、配置信息 52、配置路由器R
1、R 2、R37(1)配置路由器R17(2)配置路由器R27(3)配置路由器R3 83、配置主机PC0、PC18(1)配置PC0的信息8(2)配置PC1的信息 94、配置路由器R2(R1)到路由器R1(R2)的静态路由10(1) 路由器R2到R1的静态路由10(2)路由器R1到R2的静态路由105、配置路由器R2(R3)到路由器R3(R2)的静态路由10(1) 路由器R2到R3的静态路由10(2) 路由器R3到R2的静态路由10六、测试与分析1 11、配置静态路由前1 12、配置好静态路由后1 23、结论13七、体会13实验报告 一、实验目的通过本实验,可以掌握如下技能: (1) ACL的概念(2) ACL的作用(3)根据网络的开放性,限制某些ip的访问(4)如何进行数据过滤 二、实验要求Result图本实验希望result图中PC2所在网段无法访问路由器R2,而只允许主机pc3访问路由器R2的tel 服务 三、实验原理分析ACL 大概可以分为标准,扩展以及命名ACL
设计一台两缸顺序动作专用组合机床的液压系统
********学院 毕业设计(论文) 设计课题题目:设计一台两缸顺序动作专用 组合机床的液压系统专业系:机械制造工程系 专业: 班级: 姓名: 学号: 指导老师
一、设计课题题目:(05) 设计一台两缸顺序动作专用组合机床的液压系统,要求液压系统: 1、工作循环: A缸水平向左快进---A缸水平向左工进---A缸死挡铁停留---B缸垂直向上快进---B缸垂直向上工进---B缸垂直向下快退---B缸原位停止---A缸水平向右快退---A 缸原位停止 2、A、B缸快进速度为4m/min、快退速度为5m/min,工进速度20—100mm/min; 3、A、B缸进给最大行程为400mm,其中工进行程200mm; 4、A、B缸最大切削力为12000N,运动部件自重均为8000N; 5、启动换向时间0.05s; 6、导轨为平导轨,静摩擦系数为0.2,动摩擦系数为0.1。 二、设计内容及要求: 1、液压系统: (1)设计液压系统图(含:工作循环图、电磁铁及其他元件动作表、液压系统原理图、液压元件目录表,用一张2号图纸打印); (2)设计液压缸(B缸)并绘制液压缸组件装配图(用一张1号图纸打印); 2、设计液压系统的电气控制原理图(含:工作循环图、电磁动作表电气控制系统原 理图、电气元件目录表,用一张2号图纸打印); 3、PC编程(指令表、梯形图、功能图、PLC外部接线图),以实现自动控制;(功能 图和接线图画在一张3号图纸上\梯形土图用一张3号图纸); 4、设计说明书一份(不少于30页),应有:封面、目录、封底、任务书、毕业小结、参 考文献及书目、致谢等内容。
目录 第一章绪论 (4) 第二章液压系统设计 (5) 第一节明确液压系统设计要求 (5) 第二节分析液压系统工况 (5) 第三节确定液压缸的主要参数 (6) 第四节初选液压缸的工作压力、流量和功率 (7) 第五节液压系统原理图的拟订 (10) 第六节选择液压元件 (14) 第三章机床电器原理图的设计 (16) 第一节设计概述和设计要求 (16) 第二节电器元件的选择 (17) 第四章 PLC编程设计 (20) 第一节 PLC设计的概述及要求 (20) 第二节 PLC功能图I/O接线图和梯形图的设计 (20) 第五章致谢 (25) 第六章参考文献 (26)
ACL配置实验报告
南京信息工程大学实验(实习)报告 实验(实习)名称ACL的配置实验(实习)日期得分指导教师刘生计算机专业计科年级 09 班次 03 姓名童忠恺学号 20092308916 1.实验目的 (1)了解路由器的ACL配置与使用过程,会运用标准、扩展ACL建立基于路由器的防火墙,保护网络边界。 (2)了解路由器的NA T配置与使用过程,会运用NA T保护网络边界。 2.实验内容 2.1 ACL配置 (1)实验资源、工具和准备工作。Catalyst2620路由器2台,Windows 2000客户机2台,Windows 2000 Server IIS服务器2台,集线器或交换机2台。制作好的UTP网络连接(双端均有RJ-45头)平行线若干条、交叉线(一端568A,另一端568B)1条。网络连接和子网地址分配可参考图8.39。 图8.39 ACL拓扑图 (2)实验内容。设置图8.39中各台路由器名称、IP地址、路由协议(可自选),保存配置文件;设置WWW服务器的IP地址;设置客户机的IP地址;分别对两台路由器设置扩展访问控制列表,调试网络,使子网1的客户机只能访问子网2的Web服务80端口,使子网2的客户机只能访问子网1的Web服务80端口。 3.实验步骤 按照图8.39给出的拓扑结构进行绘制,进行网络互连的配置。 ①配置路由器名称、IP地址、路由协议(可自选),保存配置文件。 ②设置WWW服务器的IP地址。设置客户机的IP地址。 ③设置路由器扩展访问控制列表,调试网络。使子网1的客户机只能访问子网2的Web服务80端口, 使子网2的客户机只能访问子网1的Web服务80端口。 ④写出各路由器的配置过程和配置命令。 按照图8.38给出的拓扑结构进行绘制,进行网络互连的配置。参考8.5.7节内容。写出各路由器的配置过程和配置命令。
最新液压试题库及参考答案(绘制回路)
液压传动习题库及参考答案 六、绘制回路 1、试用两个单向顺序阀实现“缸1前进——缸2前进——缸1退回——缸2退回”的顺序动作回路,绘出回路图并说明两个顺序阀的压力如何调节。 解:采用单向顺序阀的顺序动作回路: 1Y得电,缸1和缸2先后前进,2Y得电,缸1和缸2先后退回。为此,p x1调定压力应比缸1工作压力高(10~15)%;p x2调定压力应高于缸1返回压力。 2、绘出双泵供油回路,液压缸快进时双泵供油,工进时小泵供油、大泵卸载,请标明回路中各元件的名称。 解:双泵供油回路: 1-大流量泵2-小流量泵3-卸载阀(外控内泄顺序阀)4-单向阀 5-溢流阀6-二位二通电磁阀7-节流阀8-液压缸 阀6电磁铁不得电时,液压缸快进,系统压力低于阀3、阀5调定压力,阀3、阀5均关闭,大、小流量泵同时向系统供油,q L=qp1+qp2。 阀6电磁铁得电,液压缸工进,系统压力为溢流阀5调定压力,阀3开启,大流量泵1卸载,溢流阀5开启,q L≤qp2。 3、写出图示回路有序元件名称。
解:(1)大流量泵(2)小流量泵(3)溢流阀(4)单向阀 (5)外控式顺序阀(卸荷阀)(6)调速阀 4、用一个单向定向泵、溢流阀、节流阀、三位四通电磁换向阀组成一个进油节流调速回路。解: 5、试用单向定量泵、溢流阀、单向阀、单向变量马达各一个,组成容积调速回路。 解:
6、写出下图所示回路有序号元件的名称。 解:1——低压大流量泵 2——中压小流量泵 3——外控内泄顺序阀做卸荷阀 4——溢流阀 5——二位三通电磁换向阀 6——调速阀 7、写出如图所示回路有序号元件的名称。
解:1——低压大流量泵 2——中压小流量泵 3——外控内泄顺序阀做卸荷阀; 4——单向阀; 5——溢流阀; 8、试用一个先导型溢流阀、两个远程调压阀组成一个三级调压且能卸载的多级调压回路,绘出回路图并简述工作原理。 解: (1)当1Y A不通电,系统压力为P y1由先导型溢流阀控制 (2)当1Y A通电,系统压力为P y2,由远程调压阀控制 9、绘出三种不同的卸荷回路,说明卸荷的方法。 解:
液压基本回路
第七章液压基本回路 7-4 多缸(马达)工作控制回路 一、顺序动作回路(sequencing circuit) 1、行程控制顺序动作回路 图a所示为用行程阀控制的顺序动作回路。在图示状态下,A、B两缸的活塞均在端。当推动手柄,使阀C左位工作,缸A左行,完成动作①;挡块压下行程阀D后,缸B左行,完成动作②;手动换向阀C复位后,缸A先复位,实现动作③;随着挡块后移,阀D复位,缸B退回实现动作④。完成一个工作循环。 图b所示为用行程开关控制的顺序动作回路。当阀E得电换向时,缸A左行完成 动作①;其后,缸A触动行程开关S 1使阀得电换向,控制缸B左行完成动作②;当缸B左 行至触动行程开关S 2使阀E失电时,缸A返回,实现动作③;其后,缸A触动S3使9断电, 缸B返回完成动作④;最后,缸月触动S4使泵卸荷或引起其它动作,完成一个工作循环。 2、压力控制顺序动作回路 图所示为使用顺序阀的压力控制顺序动作回路。
当换向阀左位接入回路且顺序阀D的调定压力大于缸A的最大前进工作压力时,压力油先进入缸A左腔,实现动作①;缸行至终点后压力上升,压力油打开顺序阀D进入缸B 的左腔,实现动作②;同样地,当换向阀右位接入回路且顺序阀C的调定压力大于缸B的最大返回工作压力时,两缸按③和④的顺序返回。 3、时间控制顺序动作回路 这种回路是利用延时元件(如延时阀、时间继电器等)使多个缸按时间完成先后动作的回路。图所示为用延时阀来实现缸3、4工作行程的顺序动作回路。
当阀1电磁铁通电,左位接通回路后,缸3实现动作①;同时,压力油进入延时阀2中的节流阀B,推动换向阀A缓慢左移,延续一定时间后,接通油路a、b,油液才进入缸4,实现动作②。通过调节节流阀开度,来调节缸3和4先后动作的时间差。当阀1电磁铁断电时,压力油同时进入缸3和缸4右腔,使两缸返向,实现动作③。由于通过节流阀的流量受负载和温度的影响,所以延时不易准确,一般都与行程控制方式配合使用。 二、同步回路(synchronizing circuit) 同步回路的功用是:保证系统中的两个或多个缸(马达)在运动中以相同的位移或相同的速度(或固定的速比)运动。在多缸系统中,影响同步精度的因素很多,如:缸的外负载、泄漏、摩擦阻力、制造精度、结构弹性变形以及油液中含气量,都会使运动不同步。为此,同步回路应尽量克服或减少上述因素的影响。 1、容积式同步回路 (1)、同步泵的同步回路:用两个同轴等排量的泵分别向两缸供油,实现两缸同步运动。正常工作时,两换向阀应同时动作;在需要消除端点误差时,两阀也可以单独动作。 (2)、同步马达的同步回路:用两个同轴等排量马达作配流环节,输出相同流量的油液来实现两缸同步运动。由单向阀和溢流阀组成交叉溢流补油回路,可在行程端点消除误差。 (3)、同步缸的同步回路:同步缸3由两个尺寸相同的双杆缸连接而成,当同步缸的活塞左移时,油腔a与b中的油液使缸1与缸2同步上升。若缸1的活塞先到达终点,则油腔a的余油经单向阀4和安全阀5排回油箱,油腔b的油继续进入缸2下腔,使之到达终点。同理,若缸2的活塞先达终点,也可使缸1的活塞相继到达终点。
计算机网络实验报告(7)访问控制列表ACL配置实验
一、实验项目名称 访问控制列表ACL配置实验 二、实验目的 对路由器的访问控制列表ACL 进行配置。 三、实验设备 PC 3 台;Router-PT 3 台;交叉线;DCE 串口线;Server-PT 1 台; 四、实验步骤 标准IP访问控制列表配置: 新建Packet Tracer 拓扑图 (1)路由器之间通过V.35 电缆通过串口连接,DCE 端连接在R1 上,配置其时钟频率64000;主机与路由器通过交叉线连接。 (2)配置路由器接口IP 地址。 (3)在路由器上配置静态路由协议,让三台PC 能够相互Ping 通,因为只有在互通的前提下才涉及到方控制列表。 (4)在R1 上编号的IP 标准访问控制。 (5)将标准IP 访问控制应用到接口上。 (6)验证主机之间的互通性。 扩展IP访问控制列表配置: 新建Packet Tracer 拓扑图 (1)分公司出口路由器与外路由器之间通过V.35 电缆串口连接,DCE 端连接在R2 上,配置其时钟频率64000;主机与路由器通过交叉线连接。 (2)配置PC 机、服务器及路由器接口IP 地址。 (3)在各路由器上配置静态路由协议,让PC 间能相互ping 通,因为只有在互通的前提下才涉及到访问控制列表。 (4)在R2 上配置编号的IP 扩展访问控制列表。 (5)将扩展IP 访问列表应用到接口上。 (6)验证主机之间的互通性。 五、实验结果 标准IP访问控制列表配置: PC0: PC1:
PC2:
PC1ping:
PC0ping: PC1ping: 扩展IP 访问控制列表配置:PC0: Server0:
顺序动作回路工作原理
顺序动作回路 顺序动作回路的作用是保证执行元件按照预定的先后次序完成各种动作。按照控制方式不同,可以分为行程控制和压力控制两种。 1.行程控制顺序动作回路 图7.32为行程阀控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。当推动手柄,使阀3左位工作,缸1的活塞右行,完成动作①;当缸1的活塞运动到终点后挡块压下行程阀4,缸2右行,完成动作②;手动换向阀C复位后,实现动作③;随着挡块的后移,阀4复位,缸2活塞退回,实现动作④。利用行程阀控制的优点是位置精度高、平稳可靠;缺点是行程和顺序不容易更改 图7. 33为行程开关控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。电磁阀1YA通电时使阀左位工作,缸I的活塞右行,完成动作①;当缸1的活塞运动到终点后触动行程开关2S,使电磁阀2YA通电换到左位,缸2的活塞右行,完成动作②;当缸2的活塞运动到终点后触动行程开关4S,电磁阀1Y A断电复位,实现动作③;油缸1的活塞运动到终点后触动行程开关15,电磁阀2Y A断电复位,缸2的活塞退回实现动作④。行程开关控制的顺序动作回路优点是位置精度高,调整方便,且可以更改顺序,所以应用较广,适合于工作循环经常要更改的场合。 2.压力控制顺序动作回路 利用液压系统中的工作压力变化控制各个执行元件的顺序动作是液压系统独具的控制特性。压力控制的优点是动作灵敏,安装布置比较方便;缺点是可靠性不高,位置精度低。 图7.34为顺序阀控制的动作回路。当换向阀左位接入回路且顺序阀4的调定压力大于液压缸活塞伸出最大工作压力时,顺序阀4关闭,压力油进入液压缸1的左腔,缸1的右腔经顺序阀3的单向阀回油,实现动作①;当缸1的伸出行程结束到达终点后,压力升高,压力油打开顺序阀4进人液压缸2的左腔,缸2的右腔回油,实现动作②;同样道理,当换向阀右位接入回路且顺序阀3的调定压力大于液压缸活塞缩回最大供油压力时,顺序阀3关闭,压力油进入缸2的右腔,缸2的左腔经顺序阀2的单向阀回油,实现动作③;当液压缸2的缩回行程结束到达终点后,压力升高,压力油打开顺序阀3进入缸1的右腔,缸I的左腔回油,实现动作④。为了保证顺序动作的可靠性,顺序阀的压力调定值应比前一个动作的最大工作压力高出0. 8MPa-1.OMPa,以免系统中的压力波动使顺序阀出现误动作,所以这种回路只适应于油缸数目不多且阻力变化不大的场合。 图7. 35为压力继电器控制的顺序动作回路。其T作过程如下:当电磁铁1YA通电时,
访问控制列表ACL配置-实验报告
课设5:访问控制列表ACL的配置 【实验目的】: 1.熟悉掌握网络的基本配置连接 2.对网络的访问性进行配置 【实验说明】: 路由器为了过滤数据包,需要配置一系列的规则,以决定什么样的数据包能够通过,这些规则就是通过访问控制列表ACL定义的。访问控制列表是偶permit/deny语句组成的一系列有顺序的规则,这些规则根据数据包的源地址、目的地址、端口号等来描述。 【实验设备】: 【实验过程记录】:
步骤1:搭建拓扑结构,进行配置 (1)搭建网络拓扑图: (2 虚拟机名IP地址Gateway PC0 PC1 PC2 PC3 PC4 上节课的实验已经展示了如何配置网关和IP地址,所以本次实验将不再展示,其配置对应数据见上表。 (3)设置路由信息并测试rip是否连通
三个路由器均做route操作。 对rip结果进行测试,测试结果为连通。
(4)连通后对访问控制列表ACL进行配置 代码如下: Route(config)#route rip Route(config-route)#net Route(config-route)#net Route(config-route)#exit Route(config)#access-list 1 deny Route(config)#access-list 1 permit any Route(config)#int s3/0 Route(config-if)#ip access-group 1 in Route(config-if)#end
步骤2:检验线路是否通畅 将访问控制列表ACL配置完成后点开PC0进行ping操作,ping 。 检验结果:结果显示目的主机不可达,访问控制列表ACL配置成功。
论顺序动作回路
论顺序动作回路 在由多缸组成的液压系统中,往往需要安照一定的要求实现各缸之间的顺序动作。例如,自动车床中车刀的纵横向运动,夹紧机构的定位和夹紧等。按其控制方式不同,顺序动作回路可分为:压力控制,行程控制和时间控制三类。其中前两类较多。下面我们就着重研究一下压力控制和行程控制阀的顺序动作回路 1 液压控制的顺序动作回路。 压力控制就是利用油路本身的压力变化来控制液压缸的先后动作顺序,它主要压力继电器或顺序控制阀来实现。 如图6——33,是采用两个单项顺序阀的顺序动作回路,其中单项顺序阀3控制两液压缸进给时的先后动作,单项顺序阀7控制两液压缸退回时的先后动作。该回路中,如果电磁铁2YA得电,则三项四通阀8右位接入系统,压力油先经单向阀6进入缸1的无杆腔,缸1的有杆腔油液则经阀7中的单向阀再经过阀8的右端,流回油箱。此时由于系统压力较低,阀3中顺序阀关闭,缸1的活塞先动作,进行夹紧。当缸1的活塞运动到终点后使系统油压升高,从而达到单项顺序阀3的调定压力则顺序阀开启,压力油过阀3进入缸2的无杆腔,缸2的活塞动作,缸2的有杆腔中的油液经调速阀4在经过阀8右位,流回油箱。缸2的活塞向左移动,开始镗孔。当缸2活塞左移到终点后让2YA失电1YA得电,
此时三项四通阀8左位接入系统,压力油先经阀5中的单向阀进入缸2的有杆腔而缸2的无杆腔中的油液经过阀3的单向阀再经过阀8流回油箱缸2活塞先缩回动作。当缸2活塞缩回到终点系统油压升高达到单项顺序阀7的调定压力,则顺序阀开启,压力油过阀7进入缸1的有杆腔,缸1的无杆腔中油液则经过阀6的单向阀再经过阀8流回油箱,从而缸1活塞返回,完成一次顺序动作循环。 需要注意的: 在液压控制的顺序动作回路中顺序阀的位置很关键,应加在后运动的液压缸上,这样才能实现液压缸的顺序动作,完成想要的工作顺序。 在设置顺序阀的开启压力时,应注意设定其开启压力大于前动作缸的工作压力0.8——1Mpa 2 行程控制阀的顺序动作回路。 行程控制顺序动作回路是利用运动部件到达一定位置时,通过发出信号来控制各液压缸的先后动作顺序。它可以采用行程开关,行程阀等来实现。 如图6——34,是采用电气行程开关控制电磁换向阀通断实现顺序动作的回路。该回路中,当电磁铁1YA得电,缸A活塞右行动作直至行程终点了,由挡铁触动行程开关2ST 得电,发出信号使电磁铁1YA失电,3YA得电,缸B活塞杆右行进给。当缸B右行至终点,由挡铁触动4ST得电,发
顺序动作回路工作原理
顺序动作回路工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
顺序动作回路 顺序动作回路的作用是保证执行元件按照预定的先后次序完成各种动作。按照控制方式不同,可以分为行程控制和压力控制两种。 1.行程控制顺序动作回路 图7.32为行程阀控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。当推动手柄,使阀3左位工作,缸1的活塞右行,完成动作①;当缸1的活塞运动到终点后挡块压下行程阀4,缸2右行,完成动作②;手动换向阀C复位后,实现动作③;随着挡块的后移,阀4复位,缸2活塞退回,实现动作④。利用行程阀控制的优点是位置精度高、平稳可靠;缺点是行程和顺序不容易更改 图7. 33为行程开关控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。电磁阀1YA通电时使阀左位工作,缸I的活塞右行,完成动作①;当缸1的活塞运动到终点后触动行程开关2S,使电磁阀2YA通电换到左位,缸2的活塞右行,完成动作②;当缸2的活塞运动到终点后触动行程开关4S,电磁阀1YA断电复位,实现动作③;油缸1的活塞运动到终点后触动行程开关15,电磁阀2YA断电复位,缸2的活塞退回实现动作④。行程开关控制的顺序动作回路优点是位置精度高,调整方便,且可以更改顺序,所以应用较广,适合于工作循环经常要更改的场合。
2.压力控制顺序动作回路 利用液压系统中的工作压力变化控制各个执行元件的顺序动作是液压系统独具的控制特性。压力控制的优点是动作灵敏,安装布置比较方便;缺点是可靠性不高,位置精度低。 图7.34为顺序阀控制的动作回路。当换向阀左位接入回路且顺序阀4的调定压力大于液压缸活塞伸出最大工作压力时,顺序阀4关闭,压力油进入液压缸1的左腔,缸1的右腔经顺序阀3的单向阀回油,实现动作①;当缸1的伸出行程结束到达终点后,压力升高,压力油打开顺序阀4进人液压缸2的左腔,缸2的右腔回油,实现动作②;同样道理,当换向阀右位接入回路且顺序阀3的调定压力大于液压缸活塞缩回最大供油压力时,顺序阀3关闭,压力油进入缸2的右腔,缸2的左腔经顺序阀2的单向阀回油,实现动作③;当液压缸2的缩回行程结束到达终点后,压力升高,压力油打开顺序阀3进入缸1的右腔,缸I 的左腔回油,实现动作④。为了保证顺序动作的可靠性,顺序阀的压力调定值应比前一个动作的最大工作压力高出0. 8MPa-1.OMPa,以免系统中的压力波动使顺序阀出现误动作,所以这种回路只适应于油缸数目不多且阻力变化不大的场合。 图7. 35为压力继电器控制的顺序动作回路。其T作过程如下:当电磁铁 1YA通电时,换向阀5左位接入油路,压力油进入液压缸的I左腔,缸1的右腔回油,实现动作①;当液压缸1的伸出行程结束到达终点后,压力升高,继电器3发出电信号,使电磁铁3YA通电,压力油进入液压缸2的左腔,缸2的右腔回油,实现动作②;同样道理,当3YA断电、 4YA通电时,换向阀6右位接入油路,压力油进入液压缸2右腔,实现动作③;当缸2的缩回行程结束到达终
访问控制列表实验
0分计。 4. 实验报告文件以PDF 格式提交。 【实验题目】访问控制列表(ACL )实验。 【实验目的】 1. 掌握标准访问列表规则及配置。 2. 掌握扩展访问列表规则及配置。 3. 了解标准访问列表和扩展访问列表的区别。 【实验内容】 完成教材实例5-4(P190),请写出步骤0安装与建立FTP 、WEB ,的步骤,并完成P192~P193的测试要求。 【实验要求】 重要信息信息需给出截图, 注意实验步骤的前后对比。 【实验记录】(如有实验拓扑请自行画出) 【实验拓扑】 本实验的拓扑图结构如下图: 【实验设备】 路由器一台,PC 5台(其中两台作为WWW Server 和FTP Server )。 【实验原理】 基于时间的ACL 是在各种ACL 规则(标准ACL 、扩展ACL 等)后面应用时间段选项(time-range )以实现基于时间段的访问控制。当ACL 规则应用了时间段后,只有在此时间范围内规则才能生效。此外,只有配置了时间段的规则才会在指定的时间段内生效,其他未引用时间段的规则将不受影响。 要基于时间的ACL 一生效,一般需要下面的配置步骤。
(1)定义时间段及时间范围。 (2)ACL自身的配置,即将详细的规则添加到ACL中。 (3)应用ACL,将设置好的ACL添加到相应的端口中。 【实验步骤】 步骤0: (1)配置3台PC(PC1、PC2和Manager)的IP地址、掩码、网关。 (2)检查PC与服务器的连通性如何? PC与服务器无法连通,因为还未安装FTP Server和WWW Server和配置路由器。 (3)在服务器上安装FTP Server和WWW Server。FTP Server需至少创建一个用户名和口令。 FTP Server我们选择Serv-U,下载安装后见如下界面。
液压系统三缸同步_顺序动作回路的设计与分析_邓乐
Mining & Processing Equipment 53 近年来,随着环境保护意识的增强,垃圾的处理和综合利用受到关注。在为某公司生产的垃圾送料器液压系统设计时,遇到了要求三个液压缸同步前进,然后顺序后退的回路设计问题,这里,液压系统的主要作用是完成垃圾的送料,为保证垃圾能够可靠地送料,要求在一个工作循环中,三个液压缸同步前进,到位后三个液压缸依次顺序后退至原位(此时卸料)。1 主要技术问题及解决方法针对以上问题,在细致地分析了系统主要功能要求的基础上,可以把该系统设计的主要问题归纳为两个:单因此可以采用1所分别为固接Ⅲ缸筒外的机分流同步阀的出口相连(如图2、3所示)。其实现位移同步运动的原理为:缸筒左移时,Ⅰ、Ⅲ缸筒依靠单向分流同步阀实现同步,同时利用机械挡块1、3的作用迫使挡块2移动,从而使缸筒Ⅱ与Ⅰ、Ⅲ同步运动;缸筒右移时,则按Ⅰ→Ⅱ→Ⅲ的顺序运动。当机械挡块1、3按照图1中虚线所示的方式连接、而油路连接不改变时可以实现三缸筒同步向右移动,而按Ⅰ→Ⅱ→Ⅲ的顺序向左移动。三缸顺序动作可以采用行程控制方式 (行程阀和行程开关如图2所示)或压力控制方式(顺序阀或压力继电器)。2 同步—顺序动作回路的几种方案根据以上分析,可以拟定以下4个方案:(1) 方案1如图2所示,采用行程阀实现三缸顺序动作。工作过程为:启动后,电磁换向阀1左位接通,Ⅰ、Ⅱ、Ⅲ三缸筒同步左移;至左端点时,缸筒Ⅰ压下行程开关1XK,使阀1右位接通;三缸进、出油口 转换,首先缸筒Ⅰ右移,至右端点时压下行程阀3,接着缸筒Ⅱ右移,Ⅱ至右端点时压下行程阀2,缸Ⅲ右移,Ⅲ至右位时压下行程开关2XK,阀1左位接通,完成一个工作循环。(2) 方案2如图3所示,与方案1不同之处是采用两个顺序阀实现三缸的顺序动作,其中顺序阀2的动作 压力比阀3的小,左 移时三缸同步,右 移时按照Ⅰ、Ⅱ、 Ⅲ的顺序移动,其 动作顺序为:假设 三缸筒处于右位时 为原位,Ⅲ压下 2XK,当阀1左位接 通时,三缸筒同步 左移,同时Ⅲ松开 2XK,移至左端时,Ⅰ压下1换向,右位接通, 缸筒Ⅰ首先右移,右端时,开顺序阀2右移动,力进一步增加,阀32X成一个工作循环。 (3) 方案3利用压力控制实现顺序动作的方式,可 以将图3中的顺序阀改为压力继电器和单向二位二通电磁 阀,其原理如图4所示。其缸筒向右顺序动作的原理为: 阀1右位工作,Ⅰ首先右移,到位后压力增高,压力继电 器2动作,阀2—a右位接通,Ⅱ向右移动,到右位后,压 力增大,压力继电器3动作,使阀3-a右位接通,Ⅲ向右 运动,完成Ⅰ→Ⅱ→Ⅲ的顺序动作循环,同步左移的过程与图3相同。 (4)方案4液压回路如图5所示。该回路与前面三个回路的不同之处在于,其功能更加完善,只要改变机械挡块的连接方式就可以实现两个方向的同步—顺序运动。 方案4的工作原理为:利用二位四通机动换向阀1实现液压缸Ⅰ、Ⅱ、Ⅲ的换向,利用三位四通手动换向阀9 控制3个插装阀6、7、8的开启与关闭,4个单向行程阀2、 3、4、5的配合作用实现三缸的双向顺序动作。其工作过程简述如下。 假设初始时,三缸筒处于右位,缸Ⅱ、Ⅲ分别压 下行程阀2、3,阀1左移接通。 当阀9都处于左位时,阀6、8均关闭,阀7打开,进油分别经阀6、2、3进入三缸左腔,回油分别经阀7、4、1回油箱,三缸同步左移,同时缸Ⅱ、Ⅲ分别松开 行程阀2、3,使阀2、3下位工作;当三缸筒运动至左 图2采用行程阀的方案论文编号:1001-3954-(2003)05-0053-54 液压系统三缸同步—顺序动作回路的设计与分析邓乐赵铁 焦作工学院机械系河南454000
(1405021 21 余铅波)实验5、访问控制列表实验报告.doc
成都工业学院计算机工程系 《路由与交换技术》实验报告 实验名称实验5、访问控制列表实验实验时间2016.05.09 21 学生姓名余铅波班级1405021 学号 指导教师张敏批阅教师成绩 一、实验目的: 在本练习中,您需要完成编址方案、配置路由并实施命名访问控制列表。 二、实验设备: 联网的PC机一台,安装有Windows操作系统,Packet Tracer。 三、实验拓扑图 四、实验内容(实验要求) a.将172.16.128.0/19 划分为两个相等的子网以用于Branch 。 1)将第二个子网的最后一个可用地址分配给Gigabit Ethernet 0/0 接口。 2)将第一个子网的最后一个可用地址分配给Gigabit Ethernet 0/1 接口。 3)将编址记录在地址分配表中。 4)使用适当的编址配置Branch 。 b.使用与B1 连接的网络的第一个可用地址,为B1 配置适当编址。将编址记录在地址分配表 中。 c.根据以下条件,使用增强型内部网关路由协议(EIGRP) 路由配置Branch 。 ?通告所有三个连接网络 ?分配AS 编号1 ?禁用自动总结。 ?将相应接口配置为被动接口 ?使用管理距离5 在序列0/0/0 接口上总结172.16.128.0/19。 d.在 HQ 上设置默认路由,将流量发送到S0/0/1 接口。将路由重新分配给Branch 。 e.使用管理距离5,总结Serial 0/0/0 接口上的 HQ LAN 子网。
f.设计命名访问列表HQServer 以防止任何连接Branch 路由器Gigabit Ethernet 0/0 接口的 计算机访问HQServer.pka 。允许所有其他流量。在相应的路由器上配置访问列表,将其 应用于相应的接口且保证方向正确。 g.设计命名访问列表 BranchServer 以防止任何连接HQ 路由器Gigabit Ethernet 0/0 接口 的计算机访问Branch 服务器的HTTP 和HTTPS 服务。允许所有其他流量。在相应的路由器上配置访问列表,将其应用于相应的接口且保证方向正确。 地址分配表 设备接口IP 地址子网掩码默认网关 HQ G0/0 172.16.127.254 255.255.192.0 未提供 G0/1 172.16.63.254 255.255.192.0 未提供 S0/0/0 192.168.0.1 255.255.255.252 未提供 S0/0/1 64.104.34.2 255.255.255.252 64.104.34.1 分支机构G0/0 未提供G0/1 未提供S0/0/0 192.168.0.2 255.255.255.252 未提供 HQ1 网卡172.16.64.1 255.255.192.0 172.16.127.254 HQ2 网卡172.16.0.2 255.255.192.0 172.16.63.254 HQServer.pka 网卡172.16.0.1 255.255.192.0 172.16.63.254 B1 网卡 B2 网卡172.16.128.2 255.255.240.0 172.16.143.254 BranchServer.pka 网卡172.16.128.1 255.255.240.0 172.16.143.254 五、实验步骤 步骤一:先对分配子网对分支机构的接口做配置 interface GigabitEthernet0/0 ip address 172.16.159.254 255.255.240.0 ip access-group HQServer in duplex auto speed auto interface GigabitEthernet0/1 ip address 172.16.143.254 255.255.240.0 duplex auto speed auto interface Serial0/0/0 ip address 192.168.0.2 255.255.255.252 ip summary-address eigrp 1 172.16.128.0 255.255.224.0 5 步骤二:配置ERGIP协议完成相关配置 router eigrp 1 passive-interface GigabitEthernet0/0
,教案顺序动作回路教案
---------------------------------------------------------------最新资料推荐------------------------------------------------------ ,教案顺序动作回路教案 高级技工学校教案共 5 页第 1 页章节课题第十一章液压基本回路液压系统实例 11-1 液压基本回路审阅者签名授课时间 2008 年 4 月 14 日第八周星期(一)第 1,2 节授课时数 2 教学目的 1、掌握用压力控制的顺序动作回路的工作原理及其应用特点 2、掌握用行程控制的顺序动作回路的工作原理及其应用特点教学方法讲授法、讨论法、多媒体演示、 flash 动画教学重点顺序动作回路的工作原理教学难点顺序动作回路的工作原理教具挂图作业题号 P218 第 8 题习题册第十一章教学过程时间分配主要教学内容及步骤组织教学 3 分钟复习 3+3 分钟提问师生致礼、点名、检查学生学习准备情况、使学生集中注意力上课。 提出问题 1、什么是顺序阀及其功用? 2、压力继电器的用途是什么?学生回答,教师小结归纳。 1、顺序阀的作用是当控制压力达到预先调定值时,阀芯开启,使液流通过以控制执行元件的顺序动作。 2、压力继电器的用途是当液压系统中的压力达到某一调定值时,压力继电器发出电信号,使系统中相关电气元件动作。 新课导入 6+4 分钟讲授法新课传授 10+5 分钟讲授法11-1 液压基本回路在液压传动的机械中,有些执行元件的运动需要按严格的顺序依次动作。 1 / 8
例如液压传动的机床常要求先夹紧工件,然后使工作台移动以进行切削加工,这在液压传动系统中则采用顺序动作回路来实现。 四、顺序动作回路控制液压系统中执行元件动作的先后次序的回路称为顺序动作回路。 1、用压力控制的顺序动作回路高级技工学校教案(续页)第 2 页教学过程时间分配主要教学内容及步骤新课传授 15+12 分钟讲授、flash 动画( 1)、采用顺序阀控制的顺序动作回路。 图 11-19 为采用顺序阀控制的顺序动作回路。 阀 A 和阀 B 是由顺序阀与单向阀构成的组合阀单向顺序阀。 系统中有两个执行元件: 夹紧液压缸和加工液压缸。 两液压缸按夹紧(活塞向右运动)工作进给(活塞向右运动)快退松开的顺序动作。 图 11-19 采用顺序阀控制的顺序动作回路系统工作过程如下: 【教师动画演示各个动作的同时讲授其运动过程】夹紧: 二位四通电磁阀通电,左位接入系统,压力油液进入夹紧液压缸左腔(由于系统压力低于单向顺序阀 A 的调定压力,顺序阀未开启),活塞向右运动实现夹紧,回油经阀 B 的单向阀流回油箱。 工进: 当活塞右移到终点,工件被夹紧,系统压力升高,超过阀 A 中
访问控制列表实验.详解
实验报告如有雷同,雷同各方当次实验成绩均以0分计。 警示 2.当次小组成员成绩只计学号、姓名登录在下表中的。 3.在规定时间内未上交实验报告的,不得以其他方式补交,当次成绩按0分计。 4.实验报告文件以PDF格式提交。 【实验题目】访问控制列表(ACL)实验。 【实验目的】 1.掌握标准访问列表规则及配置。 2.掌握扩展访问列表规则及配置。 3. 了解标准访问列表和扩展访问列表的区别。 【实验内容】 完成教材实例5-4(P190),请写出步骤0安装与建立,的步骤,并完成P192~P193的测试要求。 【实验要求】 重要信息信息需给出截图,注意实验步骤的前后对比。 【实验记录】(如有实验拓扑请自行画出) 【实验拓扑】 本实验的拓扑图结构如下图: 【实验设备】 路由器一台,PC 5台(其中两台作为和)。 【实验原理】 基于时间的ACL是在各种ACL规则(标准ACL、扩展ACL等)后面应用时间段选 项(time-range)以实现基于时间段的访问控制。当ACL规则应用了时间段后,只有在 此时间范围内规则才能生效。此外,只有配置了时间段的规则才会在指定的时间段内生 效,其他未引用时间段的规则将不受影响。 要基于时间的ACL一生效,一般需要下面的配置步骤。 (1)定义时间段及时间范围。 (2)ACL自身的配置,即将详细的规则添加到ACL中。 (3)应用ACL,将设置好的ACL添加到相应的端口中。 【实验步骤】
步骤0: (1)配置3台PC(PC1、PC2和Manager)的IP地址、掩码、网关。(2)检查PC与服务器的连通性如何? PC与服务器无法连通,因为还未安装和和配置路由器。 (3)在服务器上安装和。需至少创建一个用户名和口令。 我们选择Serv-U,下载安装后见如下界面。 先新建域:
实验十二 访问控制列表实验报告
实验十二访问控制列表 一、试验目的 1. 熟悉路由器的标准访问控制列表配置方法 2. 了解路由器的扩展访问控制列表配置方法 二、相关知识 访问控制列表(Access Control List ,简称ACL)既是控制网络通信流量的手段,也是网络安全策略的一个组成部分。每一个ACL列表可以由一条或若干条指令组成,对于任一个被检查的数据包,依次用每一指令进行匹配,一旦获得匹配,则后续的指令将被忽略。 路由器为不同的网络协议定义不同的ACL列表。为了标识与不同的网络协议对应的ACL,可以采用数字标识的方式。在使用ACL数字标识时,必须为每一协议的访问控制列表分配唯一的数字,并保证该数字值在所规定的范围内。标准IP协议的ACL取值范围:1-99;扩展IP协议的ACL取值范围:100-199。 1标准ACL的相关知识 标准ACL是指基于数据包中的源IP地址进行简单的包过滤的访问控制列表,其通过检查数据包的源地址,来确定是允许还是拒绝基于网络、子网络或主机IP地址的某一协议簇通过路由器的接口。 (1)标准ACL列表的定义 Router(config)# access-list access-list-number {deny | permit} source [source-wildcard ][log] Access-list-num:ACL号(1-99) Deny:若测试条件成立,则拒绝相应的数据包 Permit:若测试条件成立,则接受相应的数据包 Source:源IP地址(网络或主机均可) Source-wildcard:与源IP地址配合使用的通配掩码 Log:是否就ACL事件生成日志 (2)标准ACL列表的接口配置 Router(config-if)#ip access-group access-list-number {in | out} 此命令用于将已经定义的标准ACL列表应用于相应的路由器端口。 in:指定相应的ACL被用于对从该接口进入的数据包进行处理。 out:指定相应的ACL被用于对从该接口流出的数据包进行处理。 注:在路由器的每一个端口,对每个协议、在每个方向上只能指定一个ACL列表 2扩展ACL的相关知识 扩展ACL是对标准ACL功能上的扩展,其不仅可以基于源和目标IP地址数据包的测试,还可基于协议类型和TCP端口号进行数据包的测试,从而较标准的ACL提供了更强大的包过滤功能和设置上的灵活性 扩展ACL通常用于下列情况