主变保护整定原则
许继主变差动保护原理及相关重要试验
原作者:不祥
注释:沈天亮
一、主变差动保护原理:
1、主变的型号:
对于保护,其都是为一次设备服务的.下面我讲解一些主变一次设备的特点。
我们从一次设备讲起,下面是一次设备的图形:
对于主变,它有很多型号,目前国内35KV变电站主要使用Y/D11的主变,也有可能有其他型号的,我们下面介绍的都是以Y/D11的主变。
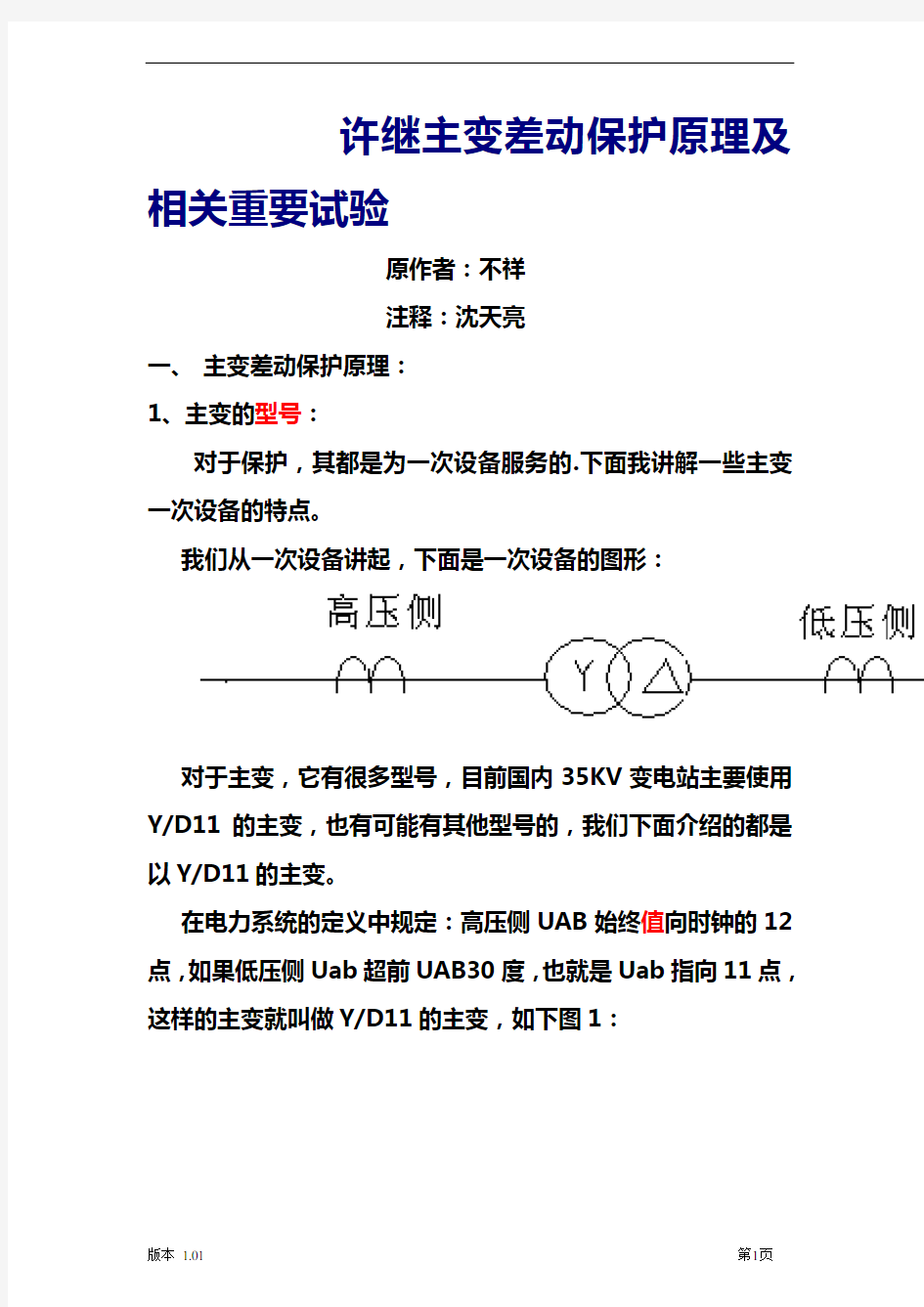
在电力系统的定义中规定:高压侧UAB始终值向时钟的12点,如果低压侧Uab超前UAB30度,也就是Uab指向11点,这样的主变就叫做Y/D11的主变,如下图1:
如果忽约主变内部的损耗,主变高、低压侧的功率因数都差不多,高低压侧电流的角度差和电压角度差一样,所以我们也可以用电流表示(这一点可以通过画向量图加以验证)(如图2)。而且用电流向量图要简单的多,今后我们都用电流表示。
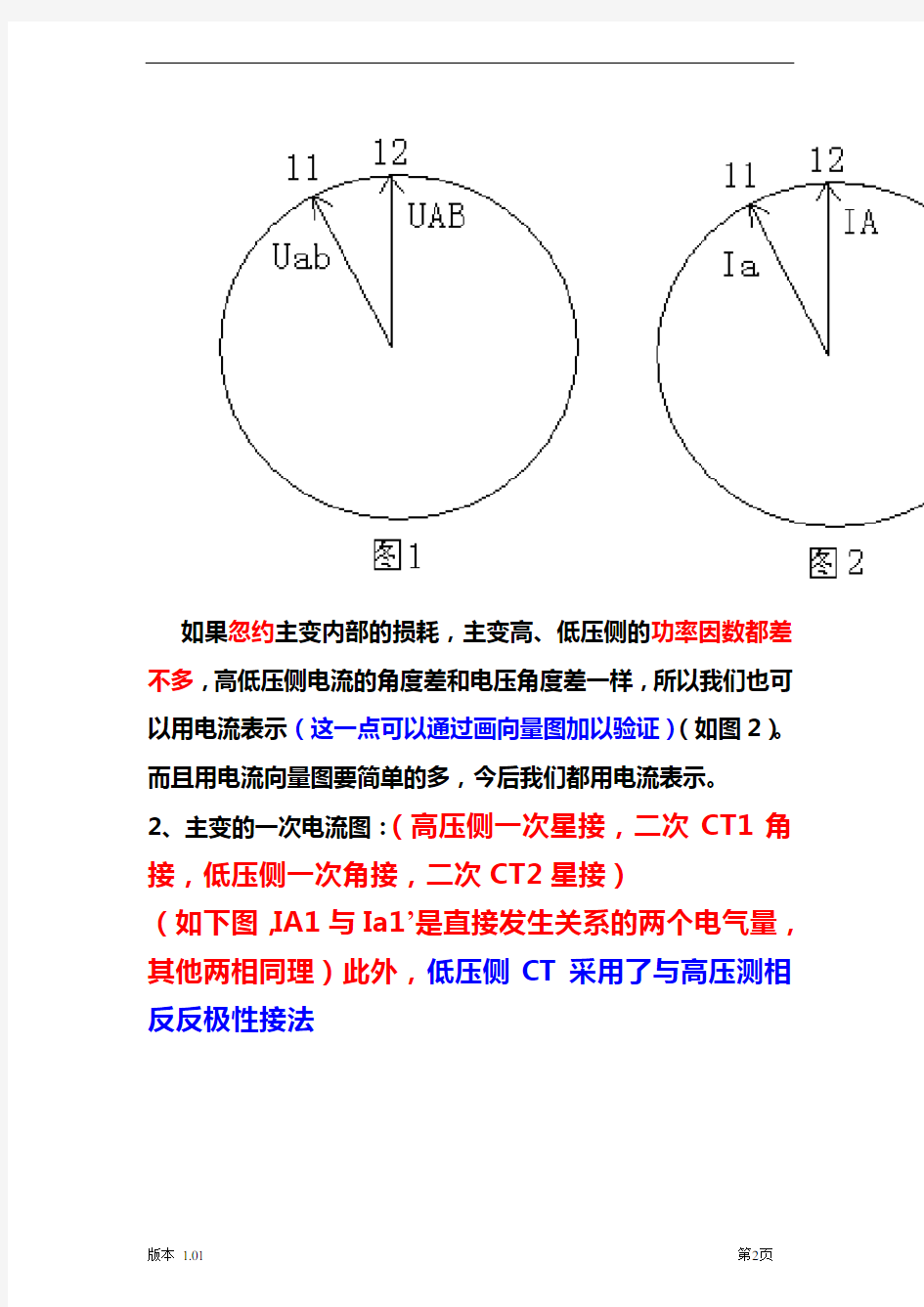
2、主变的一次电流图:(高压侧一次星接,二次CT1角接,低压侧一次角接,二次CT2星接)
(如下图,IA1与Ia1’是直接发生关系的两个电气量,其他两相同理)此外,低压侧CT采用了与高压测相反反极性接法
注:除了Ia1、Ib1、Ic1是实际方向以外,其它的都为参考方向。
以上的图为Y/D11的主变,根据下面的公式我们可以画出其向量图如下:(IA1与Ia1’是直接发生关系的两个电气量,两者相位近似相同。其他两相同理。Ia1是低压侧一次角接形成的线电流,由于向量合成,偏移了30度相位。按道理说IA1幅值应当小于Ia1’,但是下图并不关心这个,下图只关心相位关系。
它们的关系是高
压测二次CT1角接前二次
电流=
/Nct1,
=/Nct1,
=/Nct
1;
高压测二次CT1角接后二次电流
=—,=—,
=—;
低压测一次接线角接后二次电流
=—,=—,
=—;
低压测二次接线星接后二次电流
= —/Nct2;= —/Nct2,
= —/Nct2
这三个式子中出现的负号说明了低压侧CT采用了与高压测相反反极性接法,这个反极性接法形成了一种差动最基本的抵消机制
低压侧一次角形接线原始相电流=*Nb/,
=*Nb/,=*Nb/;
其中Nb/。为主变原始变比,Nb为主变外部视在变比(简称主变变比)。两者均为线电压变比。
如果高压侧3相电流对称(正序电流),则有:
||=|*Nb|,
||=|*Nb|,||=|*Nb|;
其中:Nct1、Nct2、Nb分别为主变高压侧CT1变比、主变低压侧CT2变比、主变视在变比。
注1:主变变比为Nb时,则Y/D主变内部线圈变比(原始变比)为Nb/(为原始变比)。
3、老式主变差动保护原理:
由于主变变比、高低压侧CT变比的影响,主变差动保护要大小补偿;
由于主变接线形式的不一样,主变差动保护有可能要角度补偿。
先介绍以前的主变保护原理:
高压测一次原始相(线)电流,
高压测二次CT1角接前二次电流=/Nct1,
高压测二次CT1角接后二次电流=—
=(—)/Nct1----》差动比较量1式
主变低压侧一次原始相电流为’
主变低压侧一次角接后原始线电流为=—
=*Nb/—*Nb/,
主变低压侧二次电流为(采用了反极性接法)= —
/Nct2= (—)*Nb//Nct2
-----》差动比较量2式
请注意比较差动比较量1式与2式,由于低压侧采用了反极性接法,1,2两式的抵消态势已基本形成!!!
Nct1——主变高压侧CT变比
Nb——主变高低压侧线电压比
Nct2——主变低压侧CT变比
对于主变的差动保护来说,此刻差流应该为0,也就是要
使高压侧二次电流经过角度补偿后为(—)/ Nct1,在
大小上应该等于主变低压侧二次电流为(—)
*Nb//Nct2,在角度上我们可以看出来方向相反。差动比较量1式与2式联立有如下绝对值恒等式:
|(—)/ Nct1|= |(—)
*Nb//Nct2|――――(差动量平衡公式)
所以有Nb= Nct2/ Nct1( Nb为主变外部视在线电压变比(简称主变变比)
也就是以前的保护中,高低压侧CT的变比要到CT生产厂家去定做,这是为了大小(幅值)补偿,且CT变比只能补偿幅值,其保护接线如下:
其中:当IC2’与Ic2大小一样、角度相反时,经过CDJC 继电器的电流为0,CDJC继电器不会动作;当主变有问题时经过CDJC继电器的电流不会为0,大于CDJ继电器的整定值就动作。
从上图我们可以看出,高压侧CT二次角接是为了角度补偿,CT变比定做为了幅值补偿。
而低压侧CT2必须星接,这是显然的,不然就乱套了!!!!!
但是这2点都有局限:
1、CT二次角接不好接,常常会出现接错的现象;
2、CT变比定做麻烦,如果CT坏了要更换周期长。
4、新式主变差动保护原理:
现在我们用程序可以克服上面的两个局限了!!!!!!!!
我们现在用的是微机保护,它是要经过CPU处理的,而程序改变大小很容易,所以现在CT变比就不用定做了,我们可以让微机采集到的数据乘以一个系数就可以解决这个问题,这就是我们现在常常提到的平衡系数。而在角度补偿方面我们也可以通过程序来完成。我们先分析一下通过CT二次角接就可以知道程序该怎么做了。程序就是在模拟CT二次角接的效果。
传统上,高压侧CT用硬件进行二次角接后(角度补偿):
=—,=—,
=—;―――――――――(公式1-2)
但现在高压侧CT一般为星接!!,是没有补偿效果的,所以我们用程序来补偿:(补偿高压侧部分!!!)
主变812、151、110:=(—)/,=(—
)/,=(—)/――― (公式1-3)
主变821:=—,=—,
=—;―――――(公式1-4)
在平衡系数方面(幅值补偿):
主变812:公式1-2和公式1-3)不一样,公式1-3高压
侧角度补偿后幅值比公式1-2的大小缩小了
1.732,所以(以高压侧为基准的话)程序角度
补偿时低压侧平衡系数要比外部CT接线角度
补偿小1.732倍。
主变821:公式1-2和公式1-4一样,所以程序角度补偿
时和外部CT接线角度补偿时的平衡系数一样
大。高压侧CT为星接和角接平衡系数都是一样
的!!!!!。
大小方面的计算(以主变821为例!!!!!):
我们在前面介绍过CT变比定做的公式如下:
(左式为高压侧,右式为低压侧!!!!!!)
|(—)/ Nct1|(我们看到没有除以,这是由WBH-821
程序决定的)= |(—)*Nb//Nct2|
现在引入平衡系数KH,KL用待定系数法配平上
述公式如下:
(KH=1)*|(—)/ Nct1|= KL*|(
—)*Nb//Nct2|
KH——为主变高压侧平衡系数,一般都为1(其他
侧补偿高压侧。);
KL——为主变低压侧平衡系数,(需要被算出的关
键系数!!!!!)
Nct1——主变高压侧CT变比(原始参数)
Nb——主变高低压侧线电压比(原始参数)
Nct2——主变低压侧CT变比(原始参数)
高压侧 KH一般都为1,所以有低压侧KL=
*Nct2/ Nct1/Nb(这是主变821的,主变812
的见后文!!!!其他主变保护装置型号的情况
根据上面介绍的去计算)。
例1:主变为Y/D11,35/10.5KV。高压侧CT星接,变比300/5。
低压侧CT星接,变比800/5。计算高低
压侧平衡系数。
一般来说都是把高压侧平衡系数设置为1,KH=1。其他侧补
偿高压侧。定值以高压侧下定值。
主变821:低压侧平衡系数 KL=((* Nct2)/ Nct1)
/Nb=((*(800/5))/(300/5))/(35/10.5)=1.385
主变812(151):低压侧平衡系数KL= (Nct2 /Nct1)/Nb= ((800/5) /(300/5))/(35/10.5)=0.8
KH——为主变高压侧平衡系数,一般都为1(其他侧
补偿高压侧。);
KL——为主变低压侧平衡系数,(需要被算出的关键
系数!!!!!)
Nct1——主变高压侧CT变比(原始参数)
Nb——主变高低压侧线电压比(原始参数)
Nct2——主变低压侧CT变比(原始参数)
例2:主变为Y/D11,35/10.5KV。高压侧CT角接(不同于
例1!!!),变比300/5。低压侧CT星接,
变比800/5。计算高低压侧平衡系数。
一般来说都是把高压侧平衡系数设置为1,
KH=1。定值以高压侧下定值。
主变821:低压侧平衡系数 KL= ((* Nct2)/ Nct1)/Nb=((*(800/5))/(300/5))/(35/10.5)=1.385
主变812 (151):低压侧平衡系数KL=((* Nct2)/ Nct1)/Nb= 1.385(注:定值是例1星接的倍)
5、主变比率差动:
当低压侧母线发生故障时,主变的CT很有可能饱和,而且高低压侧的饱和程度不一样,这样就形成了差电流;
当差电流大于差动定值时,主变差动就动作了,这是属于
误动作,因为这时的故障不是由差动来保护的。
对于上面的情况,我们程序采用的是比率差动,把区外故障时差流大的情况闭锁掉。
区内故障时:高压侧流入主变,为正;低压侧流入主变,
为正,或者流出主变为负,但是电流小。
区外故障时:高压侧流入主变,为正;低压侧流出主变,
为负;
比较:区内故障差流相对大,制动电流相对小;
区外故障差流相对小,制动电流相对大。
根据这种情况我们可以采取措施:当(差流/制动电流)相对大时差动可以动作;当(差流/制动电流)相对小时差动不可以动作,这就是差动保护的比率制动。
6、二次谐波制动:
在主变空投的时候(系统中主变空投不允许先合低压侧,都是先合高压侧),这个时候只有高压侧有电流,保护装置将会采到差流,如果主变容量大时,高压侧的充电电流将会很大,则差流也大,很有可能就达到差动定值了;
这样主变就没法送电了。所以这个时候我们得想办法不让差动动作。根据现场测试,发现主变空投时二次谐波相对比较大(一般正常运行的时候没有二次谐波),根据这个特点,我们设置了二次谐波制动,如果二次谐波大的话就不让差动动作。
7、差流越限:
按我们上面的分析,从理论上来说主变正常运行时,差流是为0的,但是实际上不是这样的,还有不少因数影响差流大小:
1、主变可以调档位,相当于改变主变的变比,而我
们设置平衡系数的时候与主变变比有关;当你调档
时,主变变比变了,而平衡系数没有变,这样就会
形成差流;
2、CT有误差,这样也会影响差流;
差流越限的目的有2个:
1、检查所有影响差流因数的总和是否太大;
2、负荷小的时候还可以检查差动保护的接线是否
有错;
容量大的主变空投的时候,充电电流存在的时间较长,
有可能有2到3秒,所以差流越限的延时设置最好大于
等于3秒。
8、差流速断:
当主变发现严重故障时,差流将会很大,这种故障要快速切除,所以设置了差流速断保护,其保护动作时间为20多毫秒,而差动一般为30毫秒左右。而且CT断线闭锁不了它,因为如果正常时出现CT断线也不可能有这么大差流,所以CT断线不闭锁差流速断。
10、三圈变压器:
三圈变压器实际上是两圈变压器的合成,其保护原理与两圈变一样。平衡系数的计算方法和两圈变一样(把它分解为两个两圈变计算!!!!!!)。
812主变装置平衡系数:(针对应城天鹅变Y/Y/D11三圈变压器)
高压侧 KH=1,
中压侧 KM=(Nctm/Nb1)/Ncth或着Nctm/( Nb1*Ncth)或着
(Nctm/Ncth)/ Nb1(注解:符号‘/’代表除
法,符号‘*’代表乘法。三个算式等价。)
( 请注意除法运算与乘法不同,不满足结
合律,一定要先计算括弧内的再计算括弧
外的,下同)
低压侧KL= (Nctl/Nb2)/Ncth =
Nctl/( Nb2*Ncth)= (Nctl/Ncth)/ Nb2(注
解:符号‘/’代表除法,符号‘*’代表乘
法。)
KH——为主变高压侧平衡系数,一般都为1;
KM——为主变中压侧平衡系数,
KL——为主变低压侧平衡系数
Ncth——主变高压侧CT变比
Nctm——主变中压侧CT变比
Nctl——主变压低侧CT变比
Nb1——主变高对中压侧线电压比
Nb2——主变高对低压侧线电压比
11、821主变保护装置于812主变保护装置的区别:
1、程序角度补偿时改变幅值大小不一样,如公式1-3
和公式1-4;
2、平衡系数的计算公式不一样;并且812中不可选则
高压测CT接线方式,因此采用812装置时CT必须星
接!!!!!!
3、三圈及以上变压器可用主变812,两圈变压器用主
变821或812装置保护;
4、液晶显示不一样,812显示的高低压侧电流为入装
置的电流角度补偿后乘以平衡系数,821的为入装置
的电流;
二、主变差动保护试验:(试验前请把检查CT是否接、,CT的
变比、精度确认等工作做好)
1、零漂校验:不加电流时看装置内显示的数据是否在误
差范围内;如果太大,把外部电流接线全部拆除,然后再
看是否在误差范围内(因为外部接线上有可能受别的干扰
了),这是满足要求则说明我们的保护装置没有问题;
2、刻度校验:分别从高中低压侧各相加入电流,与装置
采集的电流比较,检查其误差范围;如果偏大可以修改装
置里面的设置,把通道系数稍微修改一下(偏大就改小点,偏小就改大点);
3、差流速断:(同时校验CT断线不能闭锁它)
812保护装置:分别从主变高中侧二次(Y/Y./D主变)加
入单相电流,使(I*本侧平衡系数/大于差
流速断定值);或则从低压侧二次加入单相电
流,使(I*本侧平衡系数大于差流速断定值);
821保护装置:分别从高低压侧加入单相电流,使(I*本
侧平衡系数大于差流速断定值);
4、一般的差动(校验差动定值):
812保护装置:分别从主变高中压侧二次(Y/Y./D主变)加入单相电流,在保证I*本侧平衡系数/小于最小
制动电流的前提下,使I*本侧平衡系数/大于最小
动作电流;或者从主变低压侧二次(Y/Y./D主变)加
入单相电流,在保证I*本侧平衡系数小于最小制动电
流的前提下,使I*本侧平衡系数大于最小动作电流;
821保护装置:分别从高低压侧加入单相电流,在保证(I*本侧平衡系数)/2小于最小制动电流的前提下,使I*
本侧平衡系数大于最小动作电流;如果定值里面CT
接线设置为Y/Y时,加入A相电流,可能报A相差动
动作或者C相差动动作,或者A、C相差动动作,因为
程序要补偿,参照前面的公式1-4;如果定值里面CT
接线设置为D/Y时,加入A相电流,只报A相差动动
作。
5、比率差动(校验制动系数):
812保护装置有几种方法如下:
⑴、高(或者中)对低压侧差动:
从主变(Y/Y0/D11)高压侧A相加入电流I1,使I1/
大于最小制动电流定值,初始角度为0度,低压侧A
相加入电流大小为I1/,初始角度为180度,低压
侧C相加入电流大小为I1/(把C相差动),初始角
度为0度;然后让低压侧A相电流变小(在快要动作
的时候变化的步长不要太大,最好是0.02或者0.05,
因为电流差一点对制动系数的计算影响很大),角度不
变,当小到一定程度的时候A相差动就会动作了,这
样就得到了1个动作点。
改变I1的大小同时重复上面的试验,又可以计算出多个动作点,把这些点连接起来就成了一条直
线,看其斜率和制动系数的差是否符合要求。
⑵、高对中压侧差动:
从主变(Y/Y0/D11)高压侧A相加入电流I1,使I1/
大于最小制动电流定值,初始角度为0度,中压侧A 相加入电流大小为I1,初始角度为180度,然后让中压侧A相电流变小(在快要动作的时候变化的步长不要太大,最好是0.02或者0.05,因为电流差一点对制动系数的计算影响很大),角度不变,当小到一定程度的时候A或者C相或者AC两相差动就会动作了,这样就得到了1个动作点。
改变I1的大小同时重复上面的试验,又可以计算出多个动作点,把这些点连接起来就成了一条直线,看其斜率和制动系数的差是否符合要求。
821保护装置有几种方法如下:
⑴、定值里面CT接线设置为Y/Y(指的是高压测)时:
从主变(Y/D11)高压侧A相加入电流I1,初始角度为0度,低压侧A相加入电流I2,初始角度为180度,低压侧C相加入电流I1,初始角度为0度(不让C相差动动作);使(I1-I2)大于最小差动定值,(I1+I2)/2远大于最小制动电流定值。然后同时把高压侧A相电流、低压侧A相电流、低压侧C相电流
变小,变化的步长一样,当(I1+I2)/2小到一定程
度的时候差动就会动作了,这样就得到了一个动作点;
改变(I1-I2)的大小,重复上面的试验,又可以得到多个动作点,把这些动作点连接起来就成了一条直
线,,看其斜率和制动系数的差是否符合要求。
注意:这种方法有可能刚开始就会动作,因为试验仪器没有加到设定值时是动态的,不过加到稳定后是可
以复归的。
⑵、定值里面CT接线设置为D/Y(指的是高压测)时:
从主变(Y/D11)高压侧A相加入电流I1,初始角度为0度,低压侧A相加入电流I2,初始角度为180
度,使(I1-I2)大于最小差动定值,(I1+I2)/2远
大于最小制动电流定值。然后同时把高压侧A相电流、
低压侧A相电流变小,变化的步长一样,当(I1+I2)
/2小到一定程度的时候差动就会动作了,这样就得到
了一个动作点;
改变(I1-I2)的大小,重复上面的试验,又可以得到多个动作点,把这些动作点连接起来就成了一条
直线,看其斜率和制动系数的差是否符合要求。
6、二次谐波制动(校验二次制动系数):
⑴、试验仪器好的话可以用试验仪器的合成试验项(就
是试验仪器本身根据你的设置把基波电流和二次谐波
电流同时从试验仪器的某相电流输出),
⑵、如果试验仪器做的不准确,可以换一种方法,从试
验仪器的A相输出基波电流,从试验仪器的B相输出二
次谐波电流,把试验仪器的A、C两相并联接入装置的
某相电流;
首先加入的最大二次谐波电流大于(最大基波电流*二次谐波制动系数),同时满足差动的动作条件,然后把
二次谐波电流变小,当小于(最大基波电流*二次谐波制
动系数)的时候差动就会动作了;
7、差流越限:
分别从高中低压侧加入电流,使差流大于差流越限定值,
经过整定延时告警。
8、CT断线及闭锁差动保护:
参照第6页CT断线原理。
三、常见问题实练:(非常重要!!!!!)
1、我们的821主变保护装置(保护Y/D11的主变)在不
修改程序的条件怎么保护Y/Y0和Y/D/1的主变?
答:1)、对于Y/Y0的主变(高低压侧CT都为Y/Y接线)只要改变保护装置里面的定值就可以了,把CT接线形式设为1(Y/D接线),平衡系数的计算公式不在是原来
的KL=Nct2/Nct1/Nb,而是KL=Nct2/Nct1/Nb。
2)、对于Y/D1的主变(高低压侧CT都为Y/Y接线)