omron编码器接线方法
欧姆龙E6B2系列(增量型编码器)接线方式
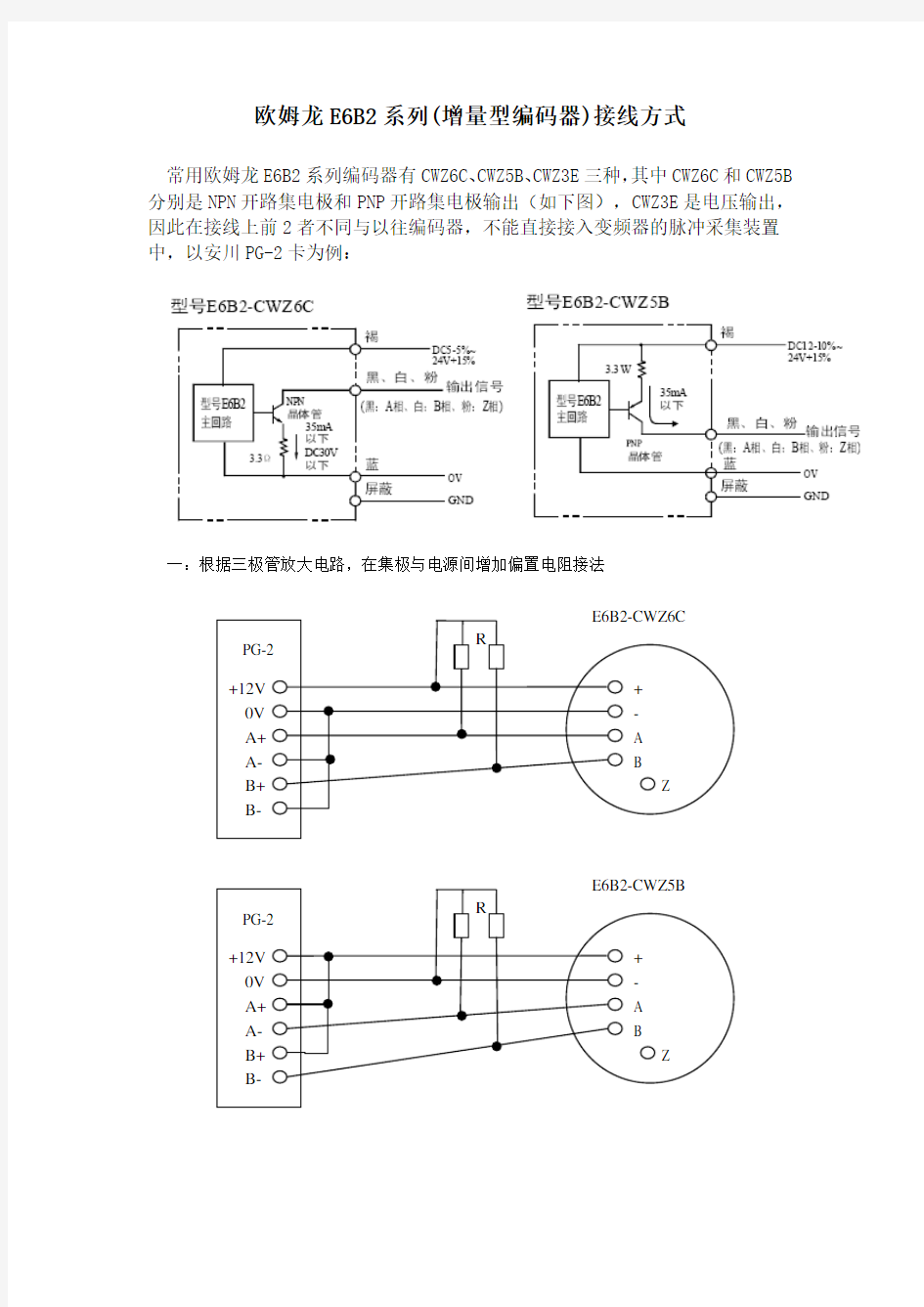
常用欧姆龙E6B2系列编码器有CWZ6C、CWZ5B、CWZ3E三种,其中CWZ6C和CWZ5B 分别是NPN开路集电极和PNP开路集电极输出(如下图),CWZ3E是电压输出,因此在接线上前2者不同与以往编码器,不能直接接入变频器的脉冲采集装置中,以安川PG-2卡为例:
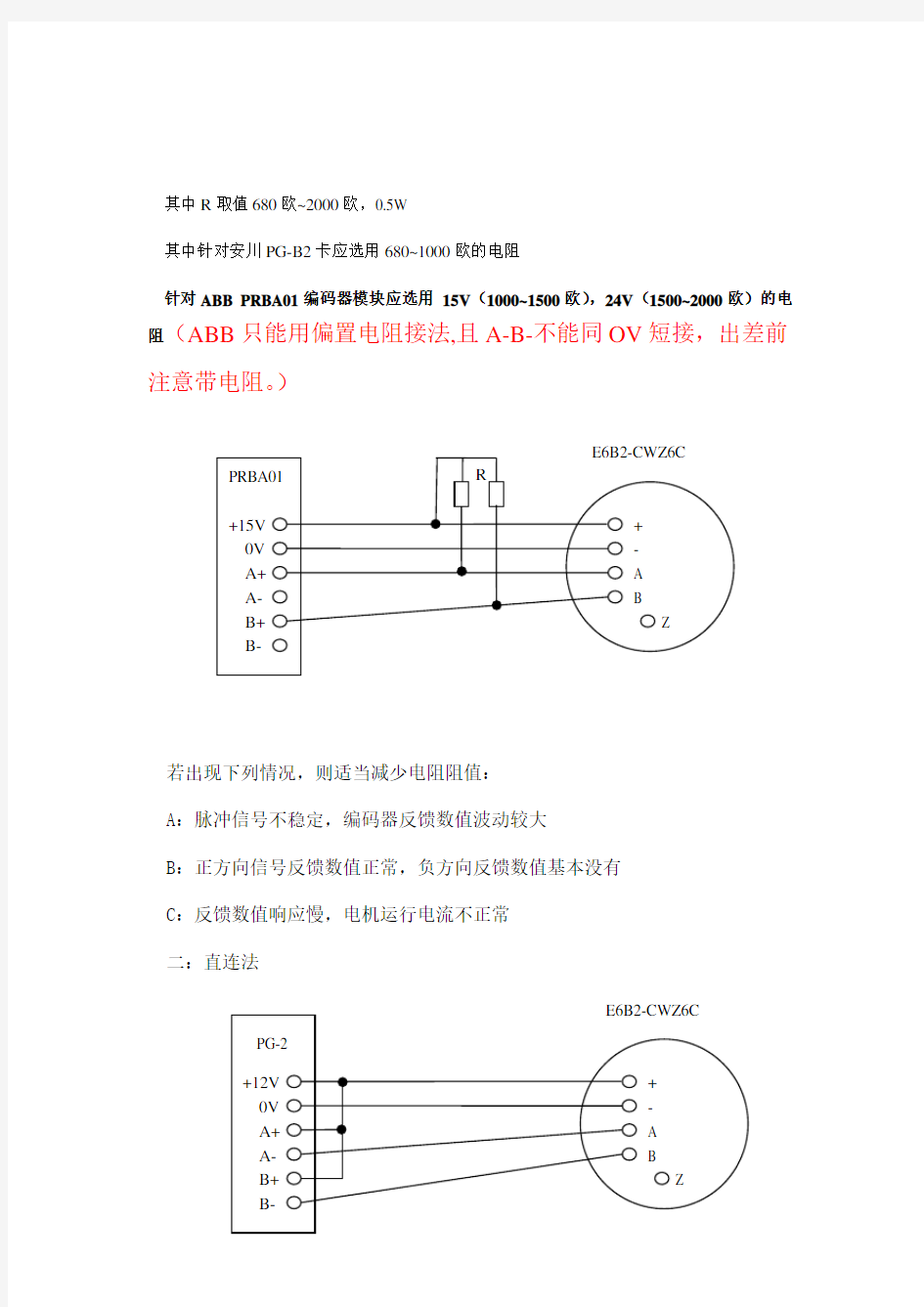
一:根据三极管放大电路,在集极与电源间增加偏置电阻接法
其中R取值680欧~2000欧,0.5W
其中针对安川PG-B2卡应选用680~1000欧的电阻
针对ABB PRBA01编码器模块应选用15V(1000~1500欧),24V(1500~2000欧)的电阻(ABB只能用偏置电阻接法,且A-B-不能同OV短接,出差前注意带电阻。)
若出现下列情况,则适当减少电阻阻值:
A:脉冲信号不稳定,编码器反馈数值波动较大
B:正方向信号反馈数值正常,负方向反馈数值基本没有
C:反馈数值响应慢,电机运行电流不正常
二:直连法
此接法经过实际运用信号正常,但有反映在超频下有可能发生异常,请在使用此连接方式时注意观察。
编码器计数的接线方法
15. 各种输出形式的旋转编码器与后续设备(PLC、计数器等)接线分别怎么接? ⑴与PLC连接,以CPM1A为例①NPN集电极开路输出 方法1:如下图所示 这种接线方式应用于当传感器的工作电压与PLC的输入电压不同时,取编码器晶体管部分,另外串入电源,以无电压形式接入PLC。但是需要注意的是,外接电源的电压必须在DC30V 以下,开关容量每相35mA以下,超过这个工作电压,则编码器内部可能会发生损坏。 具体接线方式如下:编码器的褐线接编码器工作电压正极,蓝线接编码器工作电压负极,输出线依次接入PLC的输入点,蓝线接外接电源负极,外接电源正极接入PLC的输入com端。 方法2:编码器的褐线接电源正极,输出线依次接入PLC的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。 ②电压输出接线方式如图所示: 具体接线方式如下:编码器的褐线接电源正极,输出线依次接入PLC 的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。不过需要注意的是,不能以下图方式接线。 ③PNP集电极开路输出 接线方式如下图所示:
具体接线方式如下:编码器的褐线接工作电压正极,蓝线接工作电压负极,输出线依次接入PLC的输入com端,再从电源负极端拉根线接入PLC的输入com端。④线性驱动输出具体接线如下:输出线依次接入后续设备相应的输入点,褐线接工作电压的正极,蓝线接工作电压的负极。 ⑵与计数器连接,以H7CX(OMRON制)为例H7CX输入信号分为无电压输入和电压输入。 ①无电压输入:以无电压方式输入时,只接受NPN输出信号。 NPN集电极开路输出的接线方式如下: 具体接线方式如下:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。 NPN电压输出的接线方式如下: 接线方式与NPN集电极开路输出方式一样。 ②电压输入NPN集电极开路输出的接线方式如下图所示: 具体接线方式如下:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。PNP集电极开
编码器接线规范
编码器接线规范 编码器(encoder)是将物理信号编制、转换为可用以通讯、传输和存储的信号的一种设备。应用于速度控制或位置控制系统的检测元件。现场运输小车均使用的是帝尔TR 厂家的CEV65 M 型号编码器,其中C 表示紧凑绝对型、E 表示光学、V 表示实轴、M 表示多圈、65表示外壳 65mm。 图1编码器 图2 编码器后盖地址设定及接线端子介绍
编码器接线方法1: 所需工具:剥线刀、开口2mm一字改锥、内六花一套、偏口钳一把,开口3mm十字螺丝刀一把。 操作步骤: 1)设定地址,接线口朝下拿编码器,左边拨码是十位,右边拨码是个位。 2)设定终端:只接入线时,此编码器是终端,两个终端都打到ON;入线和出线都接时两个拨码都拨到1位。 3)接线: a)把接线端子的附件按顺序套在DP线上,如图3; 图3接线附属设备安装顺序 b)剥除DP线外层的橡胶层10cm左右,如图4; 图4 DP线拨线图5处理屏蔽线 c)把内层的金属屏蔽层屡开,并拧成一股,如图5; d)剥开线内部白色保护层,把屏蔽层接到图7中椭圆标出的螺丝上, 并接网线,A接绿线,B接红线,如图6,图7。
图6穿线图7接线 此方法优、缺点: 优点:屏蔽层接触好; 缺点:接线方法复杂,不易于操作 编码器接线方法2: 所需工具:DP线剥线刀、开口2mm一字改锥、内六花一套、偏口钳一把,开口3mm十字螺丝刀一把。 操作步骤: 1)设定地址,接线口朝下拿编码器,左边拨码是十位,右边拨码是个位。 2)设定终端:只接入线时,此编码器是终端,两个终端都打到ON;入线和出线都接时两个拨码都拨到1位。 3)接线: a)用专业DP线剥线刀剥线,按图8按顺序穿上附件,并做好屏蔽; 图8剥线图9穿线 b)接线,A接绿线,B接红线,如图10。
伺服电机接线方式
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 命令脉冲补偿β 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 × = = =
SIG+55SIG+ SIG-64SIG- BAT+31BAT+ BAT-42BAT- GND外壳3地线 旧版富士驱动器参数设置新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O接线说明: 1、2、7 24V 36、41 0V 4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 14
25 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0.** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=分子(N)/分母(M) 台达编码器接线说明:
松下伺服系统基本接线及常见问题解决方法
松下伺服系统基本接线及常见问题解决方法 一、基本接线 主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册); 控制电源输入r、t也可直接接~220V; 电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。 二、试机步骤 试机功能 仅按基本接线就可试机; 在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’; 按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’; 按住‘’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。 按‘SET’键结束。 2.内部速度控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; 参数、设置为1:(注此类参数修改后应写入EEPROM,并重新上电) 调节参数,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 3.位置控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V); PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号; 参数设置为0,No42设置为3,No43设置为1; PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。 另外,调整参数、,可改变电机每转所需的脉冲数(即电子齿轮)。 MBDDT2210003电机,MBDDT2210003电机常见问题解决方法:
松下A5伺服驱动器IF口接脚详解
松下A5伺服驱动器I/F口(X4)接脚详解 1脚:OPC1,指令脉冲输入2,脉冲信号 2脚:OPC2,指令符号输入2,控制方向 3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。 5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 6脚:SIGN2,指令符号输入2,plc继电器输出端子, 1——6脚该段输入脉冲在500kpps以下使用。为光电耦合器输入。对应行驱动线/开路集电极。容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。 设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择 最大输入电压DC24V,额定电流10mA。(输入电路参考3--30) 7脚:COM+,控制信号电源(+).电源的最低电压为11.4V以上。 8脚:NOT,反向驱动禁止输入。 9脚:POT,正向驱动禁止输入。 8——9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。 10脚:BRKOFF-,外部制动器解除输出。 11脚:BRKOFF+,外部制动器解除输出。 12脚:ZSP,零速检测输出。 13脚:GND,信号地。 14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。 15脚:GND,信号地。 16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。 17脚:GND,信号地。 18脚:N-ATL,反向转矩限制输入。 14——18脚(输入电路参考3--31) 19脚:CZ,Z相输出(开路集电极)。 20脚:无。。 21脚:OA+,A相输出。 22脚:OA-,A相输出。 23脚:OZ+,Z相输出。 24脚:OZ-,Z相输出。 25脚:GND,信号地。 控制输入出厂设定见3—37,4-32,4-33 26脚:VS-SEL1; ZEROSPD; SI3输入, 位置控制时为减震控制切换输入(VS-SEL1),设置参数为PR2.13减振滤波器切换选择。 速度、转矩控制时为零速箝位输入(ZEROSPD),设置参数为PR3.15零速箝位机能选择(默认值0,无效)/PR3.16零速箝位等级。 27脚:GAIN;SI4输入, 增益切换输入(GAIN), 位置控制时PR1.15
松下伺服器接线总结..-共27页
松下伺服电机接线总结 伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H 运动控制卡型号:PCI-1240 1、主电路 工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。软件开关通过程序控制主电路的通断,正常运行情况下一直运行。此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。 2、脉冲发送电路
接线根据: 运动控制卡PCI-1240给出的控制卡功能模块图如下图所示 由图可知,运动控制卡输出脉冲的方式为长线驱动方式。 松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图 手册P3-18(P134)给出的长线驱动接线方法如下图
3、编码器反馈脉冲接收电路 接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考 网址:http://bbs.gongkong1/Details/201910/2019103112034201901-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。 接线根据: 伺服驱动器说明书P3-32(P148)给出的接线说明
编码器的安装使用与接线方法
编码器的安装使用与接线方法 绝对型旋转编码器的机械安装使用:绝对型旋转编码器的机械安装有高速端安装、低速端安装、辅助机械装置安装等多种形式。 高速端安装:安装于动力马达转轴端(或齿轮连接),此方法优点是分辨率高,由于多圈编码器 有4096圈,马达转动圈数在此量程范围内,可充分用足量程而提高分辨率,缺点是运动物体通过减 速齿轮后,来回程有齿轮间隙误差,一般用于单向高精度控制定位,例如轧钢的辊缝控制。另外编码器直接安装于高速端,马达抖动须较小,不然易损坏编码器。 低速端安装:安装于减速齿轮后,如卷扬钢丝绳卷筒的轴端或最后一节减速齿轮轴端,此方法已无齿轮来回程间隙,测量较直接,精度较高,此方法一般测量长距离定位,例如各种提升设备,送料小车定位等。 辅助机械安装:常用的有齿轮齿条、链条皮带、摩擦转轮、收绳机械等。 旋转编码器是一种光电式旋转测量装置,它将被测的角位移直接转换成数字信号(高速脉冲信号)。 编码器如以信号原理来分,有增量型编码器,绝对型编码器。 我们通常用的是增量型编码器,可将旋转编码器的输出脉冲信号直接输入给PLC,利用PLC的高速计数器对其脉冲信号进行计数,以获得测量结果。不同型号的旋转编码器,其输出脉冲的相数也不同,有的旋转编码器输出A、B、Z三相脉冲,有的只有A、B相两相,最简单的只有A相。 编码器有5条引线,其中3条是脉冲输出线,1条是COM端线,1条是电源线(OC门输出型)。编码器的电源可以是外接电源,也可直接使用PLC的DC24V电源。电源“-”端要与编码器的COM 端连接,“+ ”与编码器的电源端连接。编码器的COM端与PLC输入COM端连接,A、B、Z两相脉冲输出线直接与PLC的输入端连接,A、B为相差90度的脉冲,Z相信号在编码器旋转一圈只有一个脉冲,通常用来做零点的依据,连接时要注意PLC输入的响应时间。旋转编码器还有一条屏蔽线,使用时要将屏蔽线接地,提高抗干扰性。 编码器-----------PLC A-----------------X0 B-----------------X1 Z------------------X2 +24V------------+24V COM------------- -24V-----------COM[1]
松下A伺服驱动器IF口接脚详解
松下A伺服驱动器I F 口接脚详解 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
松下A5伺服驱动器I/F口(X4)接脚详解 1脚:OPC1,指令脉冲输入2,脉冲信号 2脚:OPC2,指令符号输入2,控制方向 3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 4脚:PULS2,指令脉冲输入2,plc脉冲输出端子。 5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻 6脚:SIGN2,指令符号输入2,plc继电器输出端子, 1——6脚该段输入脉冲在500kpps以下使用。为光电耦合器输入。对应行驱动线/开路集电极。容许输入最高频率在长线驱动器输入时为500kpps,集电极开路输入时为 200kpps。 设置参数为:指令脉冲极性设定/指令脉冲输入模式设定/指令脉冲输入选择 最大输入电压DC24V,额定电流10mA。(输入电路参考3--30) 7脚:COM+,控制信号电源(+).电源的最低电压为以上。 8脚:NOT,反向驱动禁止输入。 9脚:POT,正向驱动禁止输入。 8——9脚参数设置为:驱动禁止输入设定(默认值1)/驱动禁止时顺序设置(默认值0),(接脚描述参考3--38)与错误码38有关联。 10脚:BRKOFF-,外部制动器解除输出。 11脚:BRKOFF+,外部制动器解除输出。 12脚:ZSP,零速检测输出。
13脚:GND,信号地。 14脚:SPR/TRQR/SPL,速度指令输入/转矩指令输入/速度限制输入。 15脚:GND,信号地。 16脚:P-ATL/TRQR,正向转矩限制输入/转矩指令输入。 17脚:GND,信号地。 18脚:N-ATL,反向转矩限制输入。 14——18脚(输入电路参考3--31) 19脚:CZ,Z相输出(开路集电极)。 20脚:无。。 21脚:OA+,A相输出。 22脚:OA-,A相输出。 23脚:OZ+,Z相输出。 24脚:OZ-,Z相输出。 25脚:GND,信号地。 控制输入出厂设定见3—37,4-32,4-33 26脚:VS-SEL1;ZEROSPD;SI3输入, 位置控制时为减震控制切换输入(VS-SEL1),设置参数为减振滤波器切换选择。速度、转矩控制时为零速箝位输入(ZEROSPD),设置参数为零速箝位机能选择(默认值0,无效)/零速箝位等级。 27脚:GAIN;SI4输入, 增益切换输入(GAIN), 位置控制时 速度控制时
编码器安装通用指引
本技术文档提供参考方案,旨在解决因机械安装和布线造成的编码器的故障。 一般指引 请不要敲击编码器请不要敲击编码器!! 请不要使编码器承受超出轴所允许的负载请不要使编码器承受超出轴所允许的负载!! 请不要打开编码器内部请不要打开编码器内部!! 请不要使用刚性联轴器不要使用刚性联轴器!! 请不要机械加工编码器本体或者轴请不要机械加工编码器本体或者轴!! 每种产品的安装方式都不尽相同,所以难于提供所有安装方式的信息。按照以下安装指引,结合相应的安装规范仔细安装,能保证产品运行的长久性。 柔性联轴器,伺服夹环,安装螺丝等其他安装硬件是不包含在编码器中的,如需要请与厂家联系。 编码器安装及接线指导
机械安装 实心轴类 1、编码器轴与用户端输出轴之间采用弹性软连接,以避免因用户轴的串动、跳动而造成编码器轴系和码盘的损坏。 2、安装时请注意允许的轴负载。 3、应保证编码器轴与用户输出轴的不同轴度<0.20mm ,与轴线的偏角<1.5°。 4、安装时严禁敲击和摔打碰撞,以免损坏轴系和码盘。 空心轴类 1、要避免与编码器刚性连接。 2、 安装轴的尺寸请参照对应的说明。 3、安装时编码器应轻轻推入被套轴,严禁用锤敲击,以免损坏轴承和码盘。 4、长期使用时,检查固定编码器的螺钉是否松动。 典型机械安装方式之一典型机械安装方式之一::伺服法兰型 1、固定机器上的驱动轴; 不能将编码器轴与机器直接相连接,通常采用柔性联轴器。 2、安装联轴器(1)到编码器上,请注意联轴器不要接触到编码器表面; 3、将带螺丝(3)的伺服夹环(2)推到安装法兰表面,但不要锁紧螺丝; 4、旋转伺服夹环(2)以便将编码器推入到位 5、旋转伺服夹环(2)进入到伺服套子中,然后轻轻缩紧。 6、在驱动轴上固定好联轴器(1)并尽量减少角度和水平对准误差以保证联轴器和编码器安装误差在允许范围内。 7、锁紧伺服夹环上的3个螺丝。
欧姆龙编码器正确的接线
(1)正确接线至关重要,如图1 为NPN 输出增量型E6B2-CWZ6C 的接线原理,图2 为NPN 输出增量型E6B2-CWZ6C 的实际接线,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源正极。 (2)下图为PNP 输出增量型E6B2-CWZ6B 的实际接线图,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源负极。
(3)图1 为绝对值型编码器的线与PLC 输入的点的对应图,图2 为NPN 输出绝对值型 E6C3-AG5C 的实际接线图,红色线接电源正极,黑色线接电源负极,褐色线接输入0.00,橙色线接输入0.01,黄色线接输入0.02,绿色线接输入0.03,蓝色线接输入0.04,紫色线接输入0.05,灰色线接输入0.06,白色线接输入0.07,粉色线接输入0.08,PLC 的COM 接电源正极。
(4)下图为PNP 输出绝对值型E6C3-AG5B 的实际接线图,红色线接电源正极,黑色线接 电源负极,褐色线接输入0.00,橙色线接输入0.01,黄色线接输入0.02,绿色线接输入0.03,蓝色线接输入0.04,紫色线接输入0.05,灰色线接输入0.06,白色线接输入0.07,粉色线接 输入0.08,PLC 的COM 接电源负极。 (5)图1 为线驱动编码器的接线原理,图2 为实际接线图,黑色线接A0+,黑红镶边线A0-,白色线接B0+,白红镶边线接B0- 橙色线接Z0+,橙红镶边线接Z0-,褐色线接电源+5V,蓝色线接电源0V,切勿接线错误。
松下伺服电机常见问题及处理办法
松下伺服电机常见问题及处理办法 一、基本接线 主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册); 控制电源输入r、t也可直接接~220V; 电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。 二、试机步骤 1.JOG试机功能 仅按基本接线就可试机; 在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’; 按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’; 按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。 按‘SET’键结束。 2.内部速度控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; 参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电) 调节参数No.53,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 3.位置控制方式
COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V); PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号; 参数No.02设置为0,No42设置为3,No43设置为1; PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。 另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。 常见问题解决方法: 1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决? 这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No.10、No.11、No.12,适当降低系统增益。(请参考《使用说明书》中关于增益调整的内容) 2.松下交流伺服驱动器上电就出现22号报警,为什么? 22号报警是编码器故障报警,产生的原因一般有: 编码器接线有问题:断线、短路、接错等等,请仔细查对; 电机上的编码器有问题:错位、损坏等,请送修。 3.松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办? 伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数No.10、No.11、No.12,适当调整系统增益,或运行驱动器自动增益调整功能。(请参考《使用说明书》中关于增益调整的内容)
omron编码器接线方法(行业二类)
文书#借鉴 1 欧姆龙E6B2系列(增量型编码器)接线方式 常用欧姆龙E6B2系列编码器有CWZ6C 、CWZ5B 、CWZ3E 三种,其中CWZ6C 和CWZ5B 分别是NPN 开路集电极和PNP 开路集电极输出(如下图),CWZ3E 是电压输出,因此在接线上前2者不同与以往编码器,不能直接接入变频器的脉冲采集装置中,以安川PG-2卡为例: 一:根据三极管放大电路,在集极与电源间增加偏置电阻接法 PG-2 +12V 0V A+A-B+B-E6B2-CWZ6C +-A B Z R PG-2 +12V 0V A+A-B+B- E6B2-CWZ5B +-A B Z R
文书#借鉴 2 其中R 取值680欧~2000欧,0.5W 其中针对安川PG-B2卡应选用680~1000欧的电阻 针对ABB PRBA01编码器模块应选用 15V (1000~1500欧),24V (1500~2000欧)的电阻(ABB 只能用偏置电阻接法,且A-B-不能同OV 短接,出差前 注意带电阻。) 若出现下列情况,则适当减少电阻阻值: A :脉冲信号不稳定,编码器反馈数值波动较大 B :正方向信号反馈数值正常,负方向反馈数值基本没有 C :反馈数值响应慢,电机运行电流不正常 二:直连法 PG-2 +12V 0V A+A-B+B-E6B2-CWZ6C +-A B Z PRBA01 +15V 0V A+A-B+B-E6B2-CWZ6C +-A B Z R
文书#借鉴 3 此接法经过实际运用信号正常,但有反映在超频下有可能发生异常,请在使用此连接方式时注意观察。 PG-2 +12V 0V A+A-B+B-E6B2-CWZ5B +-A B Z
编码器的工作原理及作用
编码器的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器传感器 凡是利用一定的物性(物理、化学、生物)法则、定理、定律、效应等把物理量或化学量转变成便于利用的电信号的器件。传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。[全文] ,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。 编码器产生电信号后由数控制置CNC、可编程逻辑控制器PLC PLC PLC是一种专门在工业环境下应用而设计的数字运算操作的电子装置。它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。PLC及其有关的外围设备都应按照易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。[全文] 、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源 光源光源产品具有LED显示、体积小、重量轻、易携带、电池供电、性能价格比高等特点,直观快速,是一种使用极其简单方便的测试工具,产品经过防震防潮处理,可以在野外恶劣环境下长时间工作。[全文] 垂直照射,这样光就把盘子上的图像投射到接收器表面上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,旋转编码器 旋转编码器旋转编码器是用来测量转速的装置,光电式旋转编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(REP)。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组A/B相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。[全文] 也能得到一个速度信号,这个信号要反馈给变频器,从而调节变频器
松下全数字式交流伺服接线和常见故障分析
{} 一、基本接线(上海太鑫电子科技有限公司提供) 主电源输入采用~220V,从L 1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V 电机接线见操作手册第 22、23页,编码器接线见操作手册第24~26页,切勿接错。 二、试机步骤(上海太鑫电子科技有限公司提供) 1.JOG试机功能(上海太鑫电子科技有限公司提供) 仅按基本接线就可试机; 在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’ 按‘SET’键,显示‘JoG-’: 按住‘^’键直至显示‘rEAdy’ 按住‘<’键直至显示‘SrV-on’ 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。 按‘SET’键结束。 2.内部速度控制方式(上海太鑫电子科技有限公司提供) COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON (29脚)接COM-参数No.
53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 3.位置控制方式(上海太鑫电子科技有限公司提供) COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON (29脚)接COM-PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+ 5V); PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号; 参数No.02设置为0,No42设置为3,No43设置为1; PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。 另外,调整参数No. 46、No.4B(A4对应48,4B;A5对应009,010),可改变电机每转所需的脉冲数(即电子齿轮)。 常见问题解决方法: (xxxx电子科技有限公司提供) 1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决? 这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No. 10、No. 11、No.12(A5系列对应100,101,102)适当降低系统增益。(请参考《使用说明书》中关于增益调整的内容)(上海太鑫电子科技有限公司提供)
松下伺服驱动器常见问题
一、基本接线 主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册); 控制电源输入r、t也可直接接~220V; 电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。 二、试机步骤 1.JOG试机功能 仅按基本接线就可试机; 在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF -AcL’,然后按上、下键至‘AF-JoG’; 按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’; 按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。 按‘SET’键结束。 2.内部速度控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; 参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电) 调节参数No.53,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 3.位置控制方式 COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V); PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号; 参数No.02设置为0,No42设置为3,No43设置为1; PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。 另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。 常见问题解决方法: 1.松下数字式交流伺服系统MHMA2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决? 这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No.10、No.11、No.12,适当降低系统增益。(请参考《使用说明书》中关于增益调整的内容) 2.松下交流伺服驱动器上电就出现22号报警,为什么? 22号报警是编码器故障报警,产生的原因一般有: 编码器接线有问题:断线、短路、接错等等,请仔细查对; 电机上的编码器有问题:错位、损坏等,请送修。 3.松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办? 伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数No.10、No.11、No.12,适当调整系统增益,或运行驱动器自动增益调整功能。(请参考《使用说明书》中关于增益调整的内容) 4.松下交流伺服系统在位置控制方式下,控制系统输出的是脉冲和方向信号,但不管是正转指令还是反转指令,电机只朝一个方向转,为什么? 松下交流伺服系统在位置控制方式下,可以接收三种控制信号:脉冲/方向、正/反脉冲、A/B 正交脉冲。驱动器的出厂设置为A/B正交脉冲(No42为0),请将No42改为3(脉冲/方向信号)。 5.松下交流伺服系统的使用中,能否用伺服-ON作为控制电机脱机的信号,以便直接转动电机轴?
编码器PLC接线
旋转编码器与后续设备(PLC、计数器等)接线如何接? 分享到: ⑴与PLC连接,以CPM1A为例: ①NPN集电极开路输出 方法1:如下图所示 这种接线方式应用于当传感器的工作电压与PLC的输入电压不同时,取编码器晶体管部分,另外串入电源,以无电压形式接入PLC。但是需要注意的是,外接电源的电压必须在DC30V以下,开关容量每相35mA以下,超过这个工作电压,则编码器内部可能会发生损坏。 具体接线方式如下:编码器的褐线接编码器工作电压正极,蓝线接编码器工作电压负极,输出线依次接入PLC的输入点,蓝线接外接电源负极,外接电源正极接入PLC的输入com 端。 方法2:
编码器的褐线接电源正极,输出线依次接入PLC的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。 ②电压输出 接线方式如图所示: 具体接线方式如下:编码器的褐线接电源正极,输出线依次接入PLC的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。 ③PNP集电极开路输出 接线方式如下图所示: 具体接线方式如下:编码器的褐线接工作电压正极,蓝线接工作电压负极,输出线依次接入PLC的输入com端,再从电源负极端拉根线接入PLC的输入com端。 ④线性驱动输出 具体接线如下:输出线依次接入后续设备相应的输入点,褐线接工作电压的正极,蓝线接工作电压的负极。 ⑵与计数器连接,以H7CX(OMRON制)为例
H7CX输入信号分为无电压输入和电压输入。 ①无电压输入: 以无电压方式输入时,只接受NPN输出信号。 NPN集电极开路输出的接线方式如下: 具体接线方式如下:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。 NPN电压输出的接线方式如下: 接线方式与NPN集电极开路输出方式一样。 ②电压输入 NPN集电极开路输出的接线方式如下图所示:
松下A5伺服驱动器IF口接脚详解
松下A5伺服驱动器I/F 口(X4 )接脚详解 1脚:0PC1,指令脉冲输入2,脉冲信号 2脚:0PC2,指令符号输入2,控制方向 3脚:PULS1,指令脉冲输入2, +12V需串接1K Q , 1/2W的电阻,+24V需串接21K Q , 1/2W 的电阻 4 脚:PULS2 ,指令脉冲输入2,plc 脉冲输出端子。 5脚:SIGN1,指令符号输入2, +12V需串接1KQ, 1/2W的电阻,+24V需串接21 K Q , 1/2W 的电阻 6 脚:SIGN2 ,指令符号输入2,plc 继电器输出端子, 1——6 脚该段输入脉冲在500kpps 以下使用。为光电耦合器输入。对应行驱动线/开路集电极。容许输入 最高频率在长线驱动器输入时为500kpps,集电极开路输入时为200kpps。 设置参数为:PR0.06指令脉冲极性设定/PR0.07指令脉冲输入模式设定/PR0.05指令脉冲输入选择 最大输入电压DC24V,额定电流10mA。(输入电路参考3--30) 7脚:COM+,控制信号电源(+)?电源的最低电压为11.4V以上。 8 脚:NOT ,反向驱动禁止输入。 9脚:POT,正向驱动禁止输入。 8―― 9脚参数设置为:PR5.04驱动禁止输入设定(默认值1)/PR5.05驱动禁止时顺序设置(默认值0), (接脚描述参考3--38)与错误码38 有关联。 10脚:BRKOFF ―,外部制动器解除输出。 11 脚:BRKOFF+ ,外部制动器解除输出。 12脚:ZSP,零速检测输出。 13脚:GND,信号地。 14脚:SPR/TRQR/SPL ,速度指令输入/转矩指令输入/速度限制输入。 15脚:GND,信号地。 16脚:P-ATL/TRQR , 正向转矩限制输入/转矩指令输入。 17脚:GND,信号地。 18脚:N-ATL,反向转矩限制输入。 14―― 18脚(输入电路参考3--31 ) 19脚:CZ , Z相输出(开路集电极)。 20 脚:无。。 21 脚:OA+ , A 相输出。 22脚:0A ― , A相输出。 23 脚:OZ+ , Z 相输出。 24脚:OZ — , Z相输出。 25 脚:GND ,信号地。 控制输入出厂设定见3—37, 4-32,4-33 26 脚:VS-SEL1 ;ZEROSPD;SI3 输入, 位置控制时为减震控制切换输入(VS-SEL1 ),设置参数为PR2.13 减振滤波器切换选择。 速度、转矩控制时为零速箝位输入(ZEROSPD),设置参数为PR3.15 零速箝位机能选择(默认值0,无效)/PR3.16零速箝位等级。 27 脚:GAIN ;SI4 输入, 增益切换输入(GAIN ), 位置控制时PR1.15 速度控制时PR1.20 转矩控制时PR1.24
PNP-松下伺服连西门子PLC接线说明示例
伺服输入信号: 说明书上伺服输入信号端口都是默认与NPN输 出的PLC接法, NPN输出就是伺服与PLC公共端24V+,PLC输出 信号开关判断是否要与0V导通进行逻辑输出 所以7脚COM公共端接的24V+, 举例29脚SRV-ON使能信号接PLC的输出, 31脚A-CLR也是一样的,由PLC输出控制 那么如果PLC是PNP的输出,那就反着来 PNP输出就是公共端0V,输出信号开关判断是 否要与24V+导通进行逻辑输出 所以7脚COM公共端接的0V, 29脚SRV-ON使能信号接PLC的输出, 31脚A-CLR也是一样的,由PLC输出控制 输出信号: 伺服默认的输出信号也是NPN输出接法,伺服输出信号开关判断是否要与0V导通进行逻辑输出,控制PLC输入触点负载通断 举例ALM-37,36引脚:37接PLC的输入点,36接0V,伺服控制37与36的通断从而控制PLC输入触点负载的通断 如果是要求伺服是PNP的输出,一样是反着来 举例ALM-37,36引脚:37接24V+,36接PLC的输入点,伺服控制37与36的通断从而控制PLC输入触点负载的通断
脉冲输入信号也是一样:支持12~24V脉冲,默认PLC 是NPN输出 如果你是24V的脉冲,建议用1,2,4,6端口(下面的②) 因为1,2端口内置限流电阻,不用你PLC输出接了 如果你用3,4,5,6,那么就需要外接限流电阻,电阻规格 见① 以脉冲+方向的NPN输出脉冲举例就是: 1,2接24V+;4接脉冲,6接方向 以脉冲+方向的PNP输出脉冲举例就是: 1接脉冲,2接方向;4,6接0V 松下伺服问题 1)我司选用的PLC是西门子,所以是PNP形式,而松下伺服原有的电气接线原理图是NPN 形式,请问如何接线才能达到我使用的要求,我所用的50针点,只用到10针,分别是:1,2,4,6,7,29,31,41,36,37。 脉冲串接1脚,方向接2脚,4,6,7脚接0V,29脚接PLC输出点(伺服使能)或接在+24V,31接PLC输出(伺服警报清除),37脚接+24V,36脚接至PLC输入点(伺服报警)
SICK 编码器安装指南
Application & Service Note Subject: 编码器安装编码器安装通用通用通用指引指引 Product: Enocder Ref No.: TSS08T04 Version: 1.1 Date: Nov.2008 本技术文档提供参考方案,旨在解决因机械安装和布线造成的编码器的故障。 一般指引 请不要敲击编码器请不要敲击编码器!! 请不要使编码器承受超出轴所允许的负载请不要使编码器承受超出轴所允许的负载!! 请不要打开编码器内部请不要打开编码器内部!! 请不要使用刚性联轴器不要使用刚性联轴器!! 请不要机械加工编码器本体或者轴请不要机械加工编码器本体或者轴!! 每种产品的安装方式都不尽相同,所以难于提供所有安装方式的信息。按照以下安装指引,结合相应的安装规范仔细安装,能保证产品运行的长久性。 柔性联轴器,伺服夹环,安装螺丝等其他安装硬件是不包含在编码器中的,如需要请与厂家联系。
机械安装 实心轴类 1、编码器轴与用户端输出轴之间采用弹性软连接,以避免因用户轴的串动、跳动而造成编码器轴系和码盘的损坏。 2、安装时请注意允许的轴负载。 3、应保证编码器轴与用户输出轴的不同轴度<0.20mm ,与轴线的偏角<1.5°。 4、安装时严禁敲击和摔打碰撞,以免损坏轴系和码盘。 空心轴类 1、要避免与编码器刚性连接,应采用板弹簧。 2、 安装轴的尺寸请参照对应的说明。 3、安装时编码器应轻轻推入被套轴,严禁用锤敲击,以免损坏轴系和码盘。 4、长期使用时,请检查板弹簧相对编码器是否松动;因定编码器的螺钉是否松动。 典型机械安装方式之一典型机械安装方式之一::伺服法兰型 1、固定机器上的驱动轴; 不能将编码器轴与机器直接相连接,通常采用柔性联轴器。 2、安装联轴器(1)到编码器上,请注意联轴器不要接触到编码器表面; 3、将带螺丝(3)的伺服夹环(2)推到安装法兰表面,但不要缩紧螺丝; 4、旋转伺服夹环(2)以便将编码器推入到位 5、旋转伺服夹环(2)进入到伺服套子中,然后轻轻缩紧。 6、在驱动轴上固定好联轴器(1)并尽量减少角度和水平对准误差以保证联轴器和编码器安装误差在允许范围内。 7、锁紧伺服夹环上的3个螺丝。
OMRON编码器正确的接线
编码器正确的接线 (1)正确接线至关重要,如图1 为NPN 输出增量型E6B2-CWZ6C 的接线原理,图2 为NPN 输出增量型 E6B2-CWZ6C 的实际接线,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源正极。 (2)下图为PNP 输出增量型E6B2-CWZ6B 的实际接线图,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源负极。
(3)图1 为绝对值型编码器的线与PLC 输入的点的对应图,图2 为NPN 输出绝对值型E6C3-AG5C 的实际接线图,红色线接电源正极,黑色线接电源负极,褐色线接输入0.00,橙色线接输入0.01,黄色线接输入0.02,绿色线接输入0.03,蓝色线接输入0.04,紫色线接输入0.05,灰色线接输入0.06,白色线接输入0.07,粉色线接输入0.08,PLC 的COM 接电源正极。 (4)下图为PNP 输出绝对值型E6C3-AG5B 的实际接线图,红色线接电源正极,黑色线接电源负极,褐色线接输入0.00,橙色线接输入0.01,黄色线接输入0.02,绿色线接输入0.03,蓝色线接输入0.04,紫色线接输入0.05,灰色线接输入0.06,白色线接输入0.07,粉色线接输入0.08,PLC 的COM 接电源负极。
(5)图1 为线驱动编码器的接线原理,图2 为实际接线图,黑色线接A0+,黑红镶边线A0-,白色线接B0+,白红镶边线接B0-, 橙色线接Z0+,橙红镶边线接Z0-,褐色线接电源+5V,蓝色线接电源0V,切勿接线错误。