根轨迹法知识题和答案解析

第四章 根轨迹法习题及答案
4-1 系统的开环传递函数为
)
4s )(2s )(1s (K )s (H )s (G *
+++=
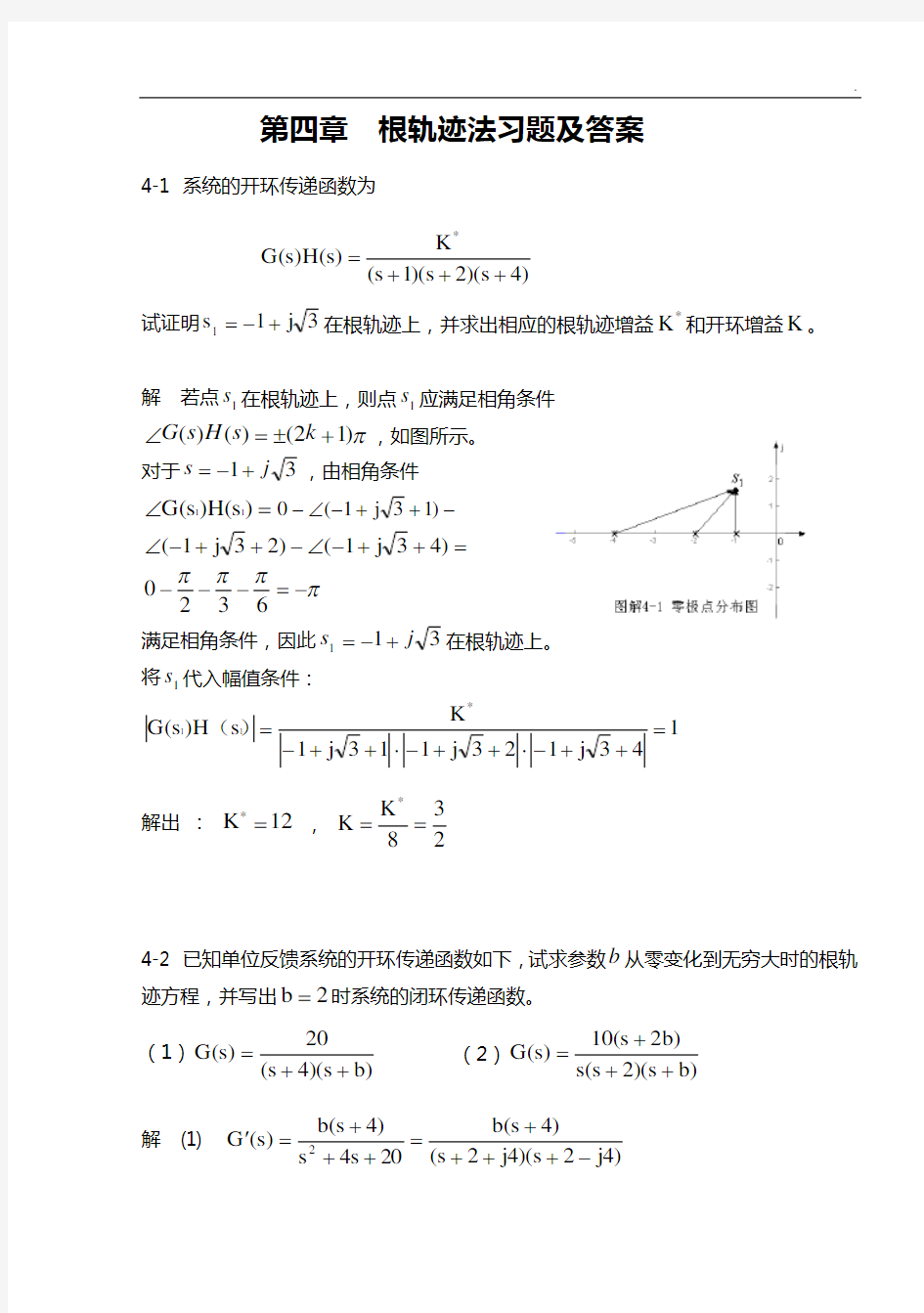
试证明3j 1s 1+-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件
π)12()()(+±=∠k s H s G ,如图所示。
对于31j s +-=,由相角条件
=∠)s (H )s (G 11-++-∠-)13j 1(0
=++-∠-++-∠)43j 1()23j 1(
ππ
π
π
-=-
-
-
6
3
2
满足相角条件,因此311j s +-=在根轨迹上。 将1s 代入幅值条件:
14
3j 123j 113j 1K s H )s (G *
11=++-?++-?++-=
)(
解出 : 12K *
= , 2
3
8K K *==
4-2 已知单位反馈系统的开环传递函数如下,试求参数b 从零变化到无穷大时的根轨迹方程,并写出2b =时系统的闭环传递函数。 (1))b s )(4s (02)s (G ++=
(2))
b s )(2s (s )b 2s (01)s (G +++=
解 (1) )
4j 2s )(4j 2s ()
4s (b 20s 4s )4s (b )s (G 2
-++++=+++=
'
28
s 6s 20
)s (G 1)s (G )s (2++=+=
Φ
(2) )
10s 2s (s )20s 2s (b )s (G 2
2++++='=)3j 1s )(3j 1s (s )
19j 1s )(19j 1s (b -+++-+++ 40
s 14s 4s )
4s (10)s (G 1)s (G )s (23++++=+=
Φ
4-3 已知单位反馈系统的开环传递函数)
b s )(4s (s
2)s (G ++=
,试绘制参数b 从零变
化到无穷大时的根轨迹,并写出s=-2这一点对应的闭环传递函数。 解 )
6s (s )
4s (b )s (G ++=
'
根轨迹如图。 2s -=时4b =, )
8s )(2s (s
216s 10s s 2)s (2
++=++=
Φ
4-4 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
⑴ )
1s 5.0)(1s 2.0(s k
)s (G ++=
(2) )1s 2(s )1s (k )s (G ++=
(3) )3s )(2s (s )
5s (k )s (G *+++= (4) )
1s (s )2s )(1s (*k )s (G -++=
解 ⑴ )
2s )(5s (s K
10)1s 5.0)(1s 2.0(s K )s (G ++=++=
三个开环极点:0p 1=,2p 2-=,5p 3-= ① 实轴上的根轨迹:(]
5,-∞-, []0,2-
② 渐近线: ???
????ππ±=π+=?-=--=σ,33)1k 2(3
73520a a
③ 分离点:
02
d 15d 1d 1=++++ 解之得:88.0d 1-=,7863.3d 2-(舍去)。 ④ 与虚轴的交点: 特征方程为
0k 10s 10s 7s )s (D 23=+++=
令 ?
??=ω+ω-=ω=+ω-=ω010)]j (D Im[0k 107)]j (D Re[3
2 解得??
?==ω7
k 10
与虚轴的交点(0,j 10±)。 根轨迹如图所示。
⑵ )
2
1s (s 2)
1s (K )
1s 2(s )1s (K )s (G ++=
++=
根轨迹绘制如下:
① 实轴上的根轨迹:(]1,-∞-, []0,5.0- ② 分离点:
1
d 15.0d 1d 1+=++ 解之得:707.1d ,293.0d -=-=。 根轨迹如图所示。
⑶根轨迹绘制如下:
① 实轴上的根轨迹:[]3,5--, []0,2-
② 渐近线: ???
????±=+==----=22)12(02
)5(320ππ?σk a a
③ 分离点:
5
1
31211+=
++++d d d d 用试探法可得
886.0-=d 。
根轨迹如图所示。 (4) 根轨迹绘制如下:
① 实轴上的根轨迹:[0, 1],[-1,-2] ②分离点:
2
d 1
1d 11d 1d 1++
+=-+ 求解得:37.1d 37.0d 21-==, 根轨迹如图所示。
4-5 已知单位反馈系统的开环传递函数为 )
101s .0)(102s .0(s k
)s (G ++=
要求:(1) 绘制系统的根轨迹;(2) 确定系统临界稳定时开环增益k 的值; (3) 确定系统临界阻尼比时开环增益k 的值。 解 (1) )
100s )(50s (s k
5000)1s 01.0)(1s 02.0(s k )s (G ++=++=
① 实轴上的根轨迹:[0, -50],[-100,-∞] ②
分离点:
0100
d 150d 1d 1=++++ 求解得87.78d 13.21d 21-=-=,
③ 渐近线:o o
a a 1806050,
,±=?-=σ 根轨迹如图所示。
(2) 系统临界稳定时150k 750000k *
==,
(3) 系统临界阻尼比时62.9k 5.48112k *
==,
4-6 已知系统的开环传递函数为)
20s 8s (s k )s (H )s (G 2
*
++=,要求绘制根轨迹并确定系统阶跃响应无超调时开环增益k 的取值范围。
解 )
20s 8s (s K )s (H )s (G 2++=*
① 实轴上的根轨迹: (]0,∞-
② 渐近线:
???
???
?ππ±=π+=?-=--++-+=σ,33)1k 2(3
83)2j 4()2j 4(0a a ③分离点:
02
j 4d 1
2j 4d 1d 1=-+++++ 解之得:33.3d ,2d -=-=。 ④与虚轴交点:*+++=k
s 20s 8s )s (D 2
3
把ω=j s 代入上方程,整理,令其实、虚部分别为零得:
???=ω-ω=ω=ω-=ω*0
20))j (D Im(0
8k ))j (D Re(3
2 解得:???==ω*
k 0 ????
?=±=ω*160
k 5
2
⑤起始角:
由相角条件 632p -=θ, 633p =θ。 根轨迹如图所示。
所有根为负实根时阶跃响应无超调,此时,16k 8.14*
≤≤ 所以8.0k 74.0≤≤
4-7 单位反馈系统的开环传递函数为)1s 7
4()1s ()
1s 2(k )s (G 2-++=
,
试绘制系统根轨迹,并确定使系统稳定的k 值范围。
解 :根轨迹绘制如下:
① 实轴上的根轨迹: []4/75.0,
- ② 渐近线:
???
????
π±=π+=?=--+--=σ22)1k 2(8
12)5.0(4/711a a
③ 与虚轴交点:闭环特征方程为
01k s )7
10
k 2(s 71s 74)s (D 23=-+-++=
把ω=j s 代入上方程,
令??
???
=ω-ω-=ω=ω--=ω0
74)710K 2())j (D Im(0711K ))j (D Re(3
2
解得: ???==ω1
K 0
,
??
???=
±=ω79K 2 根轨迹如图所示。由图可知使系统稳定的K 值范围为 79K 1<<。
4-8 已知控制系统的开环传递函数如下,试绘制系统根轨迹(要求求出起始角)。
2
2)
9s 4s (2s K )s (H )s (G +++=*)
( 解 根轨迹绘制如下:
① 实轴上的根轨迹: []2,-∞-
② 渐近线:
???
???
?ππ±=π+=?-=--+---=σ,33)1k 2(323)2(5j 25j 2a a ③ 分离点:
2
d 1
5
j 2d 25
j 2d 2+=
-++
++ 解之得:29.3d -= 71.0d = (舍去) ④ 与虚轴交点:闭环特征方程为
02s K )9s 4s ()s (D 22=++++=*
)(
把ωj s =代入上方程,
令?????=ω-ω+=ω=++ω-ω=ω**
8)K 72())j (D Im(0K 28134))j (D Re(3
24
解得: ???=±=ω*96
K 21
⑤ 起始角: π+=?-θ-)()(1k 29022901p
解出 135,4521p p -=θ=θ 根轨迹如图所示。
4-9 已知系统开环传递函数如下,试分别绘制以a 和T 为变化参数的根轨迹。 (1) )
1s (s )a s (4/1)s (G 2++=
,0
a >;(2) )1Ts )(11s .0(s 6
.2)s (G ++=,0T > 解 (1) 2
)
5.0s (s 4
/a )s (G +=
' ① 实轴上的根轨迹: )0(,-∞
② 渐近线:o o
a a 180603/1,
,±=?-=σ ③ 分离点:6/1d -= 根轨迹如图所示。 (2) 26
s 10s )
10s (Ts )s (G 2
2
+++=
' ① 实轴上的根轨迹: )0(,-∞ ② 起始角终止角:
o o p 11o 180)90(5
1
tg )51tg 180(2=+θ-+---
解得起始角o
p 7.78±=θ o 11
o
z 180)5
1
tg 51tg
(02=+--+θ-- 解得终止角o
z 90±=θ 根轨迹如图所示。
4-10 已知系统的开环传递函数如下,试概略绘出相应的根轨迹,
并求出所有根为负实根时开环增益k的取值范围及系统稳定时k的值。
)
18
s(
)1
s(
)1
s(
k
)s(
H
)s(
G
2+
-
+
=
*
解
①实轴上的根轨迹:]1
18
[-
-,
②分离点:22.4
d
1
-
=,28
.6
d
2
-
=
③渐近线:5.7
a
-
=
σ,o
a
90
±
=
?
④与虚轴交点:j
86.1
s
2,1
±
=,7.
37
k*=
根轨迹如图所示。
6.
116
k
d*
1
=
处,6.
117
k
d*
2
=
处,18
/
k
k*
=
结论:53.6
k
48.6<
<时所有根为负实根,095
.2
k>时系统稳定。
4-11 已知系统结构图如图所示,试绘制时间常数T变化时系统的根轨迹,并分析参数T的变化对系统动态性能的影响。
解:s
20s Ts 100
)s (G 23++=
作等效开环传递函数3
2*
s )
100s 20s (T 1)s (G ++=
根轨迹绘制如下: (注意:)T /1k *
=
① 实轴上的根轨迹:]10,(--∞,[]0,10- ② 分离点:
10
d 2
d 3+=
解得30d -=。 根据幅值条件,对应的015.0T =。 ③ 虚轴交点:闭环特征方程为
0100s 20s Ts )s (D 23=+++=
把ω=j s 代入上方程,整理,令实虚部分别为零得:
?????=ω-ω=ω=ω-=ω0
T 20))j (D Im(0
100))j (D Re(3
2
解得: ?
??=±=ω2.0T 10
④ 起始角:?=θ601p
参数T 从零到无穷大变化时的根轨迹如图所示。(请注意根轨迹的方向!)
从根轨迹图可以看出,当015.0T 0≤<时,系统阶跃响应为单调收敛过程;
2.0T 015.0<<时,阶跃响应为振荡收敛过程;2.0T >时,有两支根轨迹在s 右半
平面,此时系统不稳定。
若取另外一种等效开环传递函数则解题步骤如下:
100
s 20s Ts )s (G 23
++='
三条根轨迹中两条起于-10,一条起于∞-,均终止于原点
① 实轴上的根轨迹:]10,(--∞,[]0,10- ② 分离点:
10
d 2
d 3+=
解得30d -=。 其余步骤与上基本相同,根轨迹相同,只是-10处为两个开环极点,原点处为3个开环零点,根轨迹方向与图中一样。
4-12 控制系统的结构如图所示,试概略绘制其根轨迹(0k *
>)。
解 此系统为正反馈系统,应绘零度根轨迹。
① 实轴上的根轨迹:[]2,-∞-,[]+∞-,1 ② 分离点:
1
d 1
2d 3+=
+ 解得 5.0d -= ③ 起始角:根据相角条件,
∑∑==π=θ
-?n
1
j j
m 1
i i k 2
得
601p =θ,
602p -=θ,
1803p =θ。 根轨迹如图所示。
4-13 设单位反馈系统的开环传递函数为)
2s (s )
s 1(k )s (G +-=*,试绘制其根轨迹,并求出
使系统产生重实根和纯虚根的*
k 值。
解 由开环传递函数的表达式知需绘制
0根轨迹。 ① 实轴上的根轨迹: [],0,2- ),1[∞+; ② 分离点:
1
d 1
2d 1d 1-=
++ 解得:732.0d 1-= , 732.2d 2= 将732.0d s 1-==, 732.2d s 2==代入幅值条件得:
54.0K 1d =*, 46.7K 2d =*
③ 与虚轴交点:闭环特征方程为
0)s 1(K )2s (s )s (D =-++=*
把ωj s =代入上方程,整理,令实虚部分别为零得:
?????=ω-=ω=+ω-=ω*
*
)K 2())j (D Im(0
K ))j (D Re(2 解得: ???==ω*0K 0
?
??=±=ω*
2K 41
.1 根轨迹如图所示,复平面上的根轨迹为以开环零点为圆心,开环零点到分离点的距离为半径的圆 。系统产生重实根的*
K 为0.54,7.46,产生纯虚根的*
K 为2。
Ok