QX5237手电筒专用集成电路

典型应用电路图
L 1
图1:QX5237典型应用电路图
概述 QX5237是一款采用大规模集成电路
技术,
专门为使用干电池的LED 手电筒设计的专用集成电路。 QX5237适用于两节干电池的LED 手电筒的驱动。 QX5237外围电路简单,效率高,只需外加一个电感元件,即可构成LED 手电筒驱动电路板。 QX5237可靠性高、使用简单、生产一致性好,通过外围电感元件的调节,可满足LED 手电筒对不同亮度的要求。 QX5237采用TO-92和SOT23两种封装形式。 特点 输入电压范围:1.6V~3.2V 输出最大电流:大于100mA 效率高:高达80% 只需外接一个电感
LED 驱动能力:3~6个20mA 的 LED
灯 TO-92封装或SOT23封装 应用领域
两节干电池的LED 手电筒。
订货信息
产品型号
QX5237
丝印
TO-92封装的丝印:
N02X
批号
SOT23封装的丝印:
004
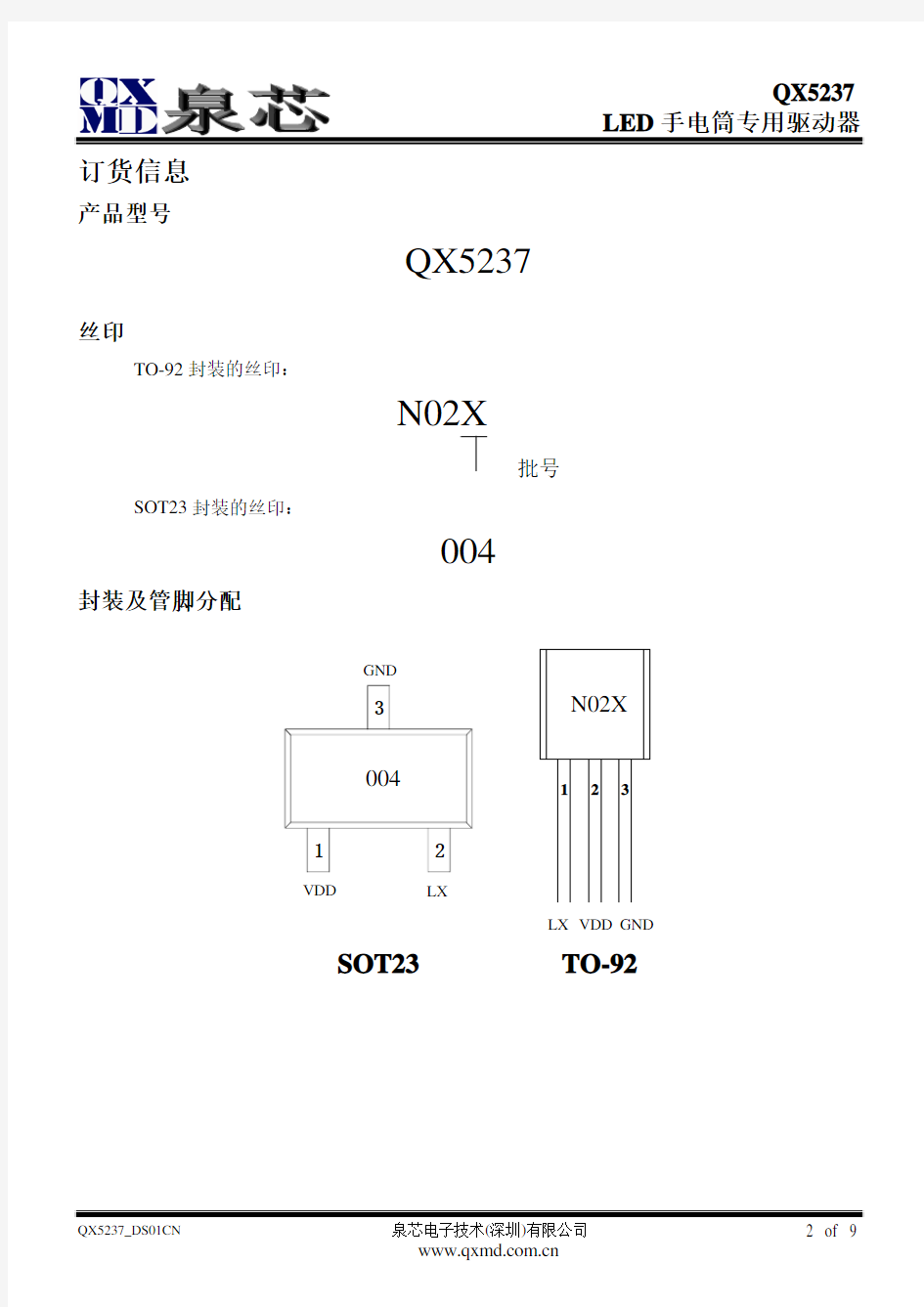
封装及管脚分配
123
LX VDD GND
TO-92
3
1
2
GND
VDD
LX
SOT23004
N02X
管脚定义
内部电路方框图
LX
图2:QX5237的内部电路方框图
极限参数
(注1)
注1:超过上表中规定的极限参数会导致器件永久性损坏,而工作在以上极限条件下可能会影响器件的可靠性。
电特性
除非特别说明, T A =25°C
典型曲线
C
除非特别说明,T A =25°
应用指南
工作原理
QX5237采用固定导通时间TON,工作于电感电流临界模式,因而外围元件仅需一个电感,并且具有高的转换效率。同时输入电流可通过外接电感值来设置,因此可通过电感来设定输出功率。
QX5237适用于两节干电池应用的LED手电筒驱动。LED功率设定
LED消耗的功率由外部电感L1设定为:
2
6
1
*10
DD
LED
V
P
L
η?
=×
其中,V DD为充电电池电压,L1为电感值。η表示转换效率。
封装信息
TO-92封装外形尺寸:
SOT23封装外形尺寸:
声明
泉芯保留电路及其规格书的更改权,以便为客户提供更优秀的产品,规格若有更改,恕不另行通知。
泉芯公司一直致力于提高产品的质量和可靠性,然而,任何半导体产品在特定条件下都有一定的失效或发生故障的可能,客户有责任在使用泉芯产品进行产品研发时,严格按照对应规格书的要求使用泉芯产品,并在进行系统设计和整机制造时遵守安全标准并采取安全措施,以避免潜在失败风险造成人身伤害或财产损失等情况。如果因为客户不当使用泉芯产品而造成的人身伤害、财产损失等情况,泉芯公司不承担任何责任。
本产品主要应用于消费类电子产品中,如果客户将本产品应用于医疗、军事、航天等要求极高质量、极高可靠性的领域的产品中,其潜在失败风险所造成的人身伤害、财产损失等情况,泉芯公司不承担任何责任。
本规格书所包含的信息仅作为泉芯产品的应用指南,没有任何专利和知识产权的许可暗示,如果客户侵犯了第三方的专利和知识产权,泉芯公司不承担任何责任。
客户服务中心
泉芯电子技术(深圳)有限公司
地址:中国深圳市南山区南头关口二路智恒新兴产业园22栋4楼
邮编:518052
电话:+86-0755-********
传真:+86-0755-********
网址:https://www.360docs.net/doc/e83578088.html,
驱动芯片的选择
电机驱动有单极性和双极性两种。当只需要电机单方向驱动时,可采用单极性驱动,如下图(a)所示,此电路由于续流二极管工作时间较长,损耗大,所以改进后的半桥驱动如下图(b): Figure 1.Illustration of the half bridge. 当需要电机正反两个方向旋转时,采用双极性驱动方式,如下: Figure 2.Illustration of the H bridge. 功能逻辑如下:(1:合并,0:断开) S1 S2 S3 S4 电机动作 1 0 0 1 正传 0 1 1 0 反转 0 0 0 0 自由 0 1 0 1 刹车 1 0 1 0 刹车 这又称为全桥驱动,上图中开关使用大功率MOS管替代,可以使用分立元件,也可以使用集成电路。但是能用于PWM驱动的低电压大电流芯片产品并不多,在智能车比赛中使用最多的有:MC33886, VNH3SP30, BTS7960B, DT340I, IRF3205。 根据查阅的资料,使用单片MC33886时易发生发热、噪声等问题,对电源电压影响过大等问题,所以可以使用两片并联,如下所示:
该接法降低了MOS管的导通内阻,增大了驱动电流,可以起到增强驱动能力、减小芯片发热的作用,但是起始频率受限,电机噪声大且发热严重。 VNH3SP30是意法半导体公司生产的专用于电机驱动的大电流功率集成芯片。芯片核心是一个双单片上桥臂驱动器(HSD)和2个下桥臂开关,HSD开关的设计采用ST的ViPowe 技术,允许在一个芯片内集成一个功率场效应MOS管和智能信号/保护电路。下桥臂开关是采用ST专有的EHD(STripFET)工艺制造的纵向场效应MOS管。3个模块叠装在一个表面组装MultiPowerSO- 30引脚框架电绝缘封装内,具体性能指标如下: ①最大电流30 A、电源电压高达40 V; ②功率MOS管导通电阻0.034 Ω; ③5 V兼容的逻辑电平控制信号输入;④内含欠压、过压保护电路;⑤芯片过热报警输出和自动关断。与MC3886相比,它具有一个显著优点就是芯片不会发热,且保护功能强大,但是存在开关频率限10 kHz,电机噪声大且电机容易发热,但芯片较贵,很多场合性价比不高。 采用2个半桥智能功率驱动芯片BTS7960B组合成一个全桥驱动器,驱动直流电机转动。BTS7960B是应用于电机驱动的大电流半桥集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。P沟道高边开关省去了电荷泵的需求,因而减少了电磁干扰(EMI)。集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和超温、过压、欠压、过流及短路保护功能。BTS7960B的通态电阻典型值为16 mΩ,驱动电流可达43 A,调节SR引脚外接电阻的大小可以调节MOS
HID 灯集成电路驱动器UCC2305 及其应用电路原理图
HID灯集成电路驱动器UCC2305及其应用电路原理图一、引言 高强度气体放电(HID:High intensity Discharge)灯实际上包括了一大类采用小型高内压弧光管发光的照明产品,基本上有三种类型:水银蒸气(MV)灯,金属卤化物(MH)灯和高、低压钠(HPS或LPS)灯。HID灯全都按与日光灯相似的放电原理工作:当灯管里充填的气体,如被镇流器提供的电流激活时便会发光。HID灯和日光灯的关键区别是灯管里的压力更高。 金属卤化物(MH)灯是为改善水银蒸气灯的亮度、显色性差和效率相对低的特征而设计。MH灯功能非常象水银蒸气灯,但因在灯管内添加了如铊、铟和钠金属的碘化物(卤化物),故比之只有水银蒸气能发放更多和更优质的光。 金卤灯与传统卤素灯也不同,因为灯管内另有一小玻璃球灌满了氙气及少许稀有金属,受电流刺激进行化学反应,就会发出色温高达4000K-12000K的光芒,如图1。 汽车中的金卤灯需使用特制镇流器将车内蓄电池的直流低压转换为触发高压使灯启动。灯启动后0.8秒亮度约达20%额定亮度,4秒内达80%额定亮度以上,亮度稳定后镇流器向灯提供约80V供电电压,保持灯以恒定功率运转。金卤灯具有负阻效应,使用时必须配镇流器才能工作,目前金卤灯和电子镇流器的价格都较高,因降低金卤灯和电子镇流器成本,缩小其体积是普及推广汽车中应用关键。
车用金卤灯镇流器系统主要由包括从9-16V汽车硫酸铅电池输入的直流-直流变换器,高压点火器,200-400Hz全桥逆变器以及保证稳态功率输出的控制电路4部分组成(图2)。DC/DC变换器须满足在9-16V输入电压范围内能输出直流电60-500V的压,并具有输入过压、输出短路/开路和过流保护功能。点火器的功能是产生瞬间高压20-30KV的击穿灯管放电。全桥逆变器提供200-400Hz全桥功率开关管的驱动信号,完成DC-AC逆变,实现灯管两端电压极性反转,防止灯管单端发黑,延长灯管寿命。控制电路起到保证向灯稳态时提供恒功率输出。稳压时灯管两端的压降约为60-110V,如35W灯管稳态时其功率必须保证在35W±2W范围之内,功率太高的会损坏灯管,缩短灯管使用寿命;功率过低则会降低输出亮度,造成驾车安全隐患。 二、集成电路驱动器UCC2305 UCC3305是德州仪器公司一款针对车用HID灯应用设计的集成电路驱动控制芯片,UCC3305集成了控制和驱动HID灯所需全部功能,既能配合快速打开汽车前灯的要求,也适用其他选择HID灯的照明设备。具有下列符合车用HID镇流器设计的性能要求: ·9-16V输入电压宽工作范围及低至6V的快速启动特性 ·具有输入过压、输出过流及过压保护 ·针对不同灯管电压的恒功率输出控制 ·频率高达300KHz的电流型PWM控制器 ·全桥驱动输出 ·灯冷、热启动电流可调与正常工作电流控制 ·符合汽车电子要求的40°-105°C宽温度工作范围
马达控制驱动芯片
特点: 低静态工作电流; 宽电源电压范围:2.5V-12V ; 每通道具有800mA 连续电流输出能力; 较低的饱和压降; TTL/CMOS 输出电平兼容,可直接连CPU ; 输出内置钳位二极管,适用于感性负载; 控制和驱动集成于单片IC 之中; 具备管脚高压保护功能; 工作温度:-20°C-80°C 。 描述: L9110是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC 之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过800mA 的持续电流,峰值电流能力可达1.5A ;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。L9110被广泛应用于玩具汽车电机驱动、脉冲电磁阀门驱动,步进电机驱动和开关功率管等电路上。 管脚定义: 序号 符号 功能 1 OA A 路输出管脚 2 VCC 电源电压 3 VCC 电源电压 4 OB B 路输出管脚 5 GND 地线 6 IA A 路输入管脚 7 IB B 路输入管脚 8 GND 地线 绝对最大范围: Ta =25°C 符 号 参 数 最 小 典 型 最 大 单 位Vcc max 电源电压 2.2 5.0 12.0 V Iout max 输出电流 - 800 1000 mA VH in 输入高电平 2.2 5.0 12.0 V VL in 输入低电平 0 0.5 0.7 V Pd max 允许电源消耗 - - 800 mW Topr 操作温度 -30 25 85 °C DP 后缀 塑料封装(DIP8) SO 后缀 塑料封装(SOP8)
电机驱动芯片
马达专用控制芯片LG9110 芯片特点: 低静态工作电流; 宽电源电压范围:2.5V-12V ; 每通道具有800mA 连续电流输出能力; 较低的饱和压降; TTL/CMOS 输出电平兼容,可直接连CPU ; 输出内置钳位二极管,适用于感性负载; 控制和驱动集成于单片IC 之中; 具备管脚高压保护功能; 工作温度:0 ℃-80 ℃。 描述: LG9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750 ~800mA 的持续电流,峰值电流能力可达1.5 ~2.0A ;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。LG9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。 管脚定义: 1 A路输出管脚、2和3 电源电压、4 B路输出管脚、5和8地线、6 A路输入管脚、7 B路输入管脚 恒压恒流桥式1A驱动芯片L293 L293是著名的SGS公司的产品,内部包含4通道逻辑驱动电路。其后缀有B、D、E等,除L293E为20脚外,其它均为16引脚。其额定工作电流为1A,最大可达1.5A,Vss电压最小4.5V,最大可达36V;Vs电压最大值也是36V,但经过我的实验,Vs电压应该比Vss电压高,否则有时会出现失控现象。 恒压恒流桥式2A驱动芯片L298N L298也是SGS公司的产品,比较常见的是15脚Multiwatt封装的 L298N,内部同样包含4通道逻辑驱动电路。 1、15脚是输出电流反馈引脚,其它与L293相同。在通常使用中这两个引脚也可以直接接地。
电机驱动器说明
使用说明 两相四线步进电机控制方式使用说明 使用直流/步进两用驱动器可以驱动一台步进电机。A,B端分别用短
接帽接通5V电源点。M1和M2四个接线端子分别接步进电机的两个绕组。要实现步进电机的旋转,输入信号端IN1,IN2,IN3,IN4依次接入低电平。(正转接入低电平的顺序是IN1→IN2→IN3→IN4,反转接入低电平的顺序是IN4→IN3→IN2→IN1)。改变脉冲的速度即可改变电机的转动速度,脉冲越快电机的转速也就越快。脉冲速度超过了电机的反应速度就容易造成电机失步。(果接入信号正常,电机发生抖动现象,证明电机接线一相接反。须调节电机接线顺序。) 四相六线步进电机控制方式使用说明 使用直流/步进两用驱动器可以驱动一台四相六线步进电机和控制一台两相四线步进电机的程序是一样的。(只是接线方式有一点不同,
四相六线步进电机需要将其中的两个公共端接电源即可。如上图接法。)M1和M2四个接线端子分别接步进电机的两个绕组。要实现步进电机的旋转,输入信号端IN1,IN2,IN3,IN4依次接入低电平。(正转接入低电平的顺序是IN1→IN2→IN3→IN4,反转接入低电平的顺序是IN4→IN3→IN2→IN1)。改变脉冲的速度即可改变电机的转动速度,脉冲越快电机的转速也就越快。脉冲速度超过了电机的反应速度就容易造成电机失步。(果接入信号正常,电机发生抖动现象,证明电机接线一相接反。须调节电机接线顺序。) 下面是一个我们用C语言,使用AT89S52单片机编写的一个简单的使电机连续运行的程序及接线图:
附录: 步进电机控制原理
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。 步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。 步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。其基本原理作用如下: (1)控制换相顺序 通电换相这一过程称为脉冲分配。例如:三相步进电机的三拍工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。 (2)控制步进电机的转向 如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。 (3)控制步进电机的速度
集成电路培养方案.
西安邮电学院电子工程学院 本科集成电路设计与集成系统专业培养方案 学科:工学---电气信息专业:集成电路设计与集成系统(Engineering---Electric Information)(Integrated Circuit Design & Integrated System)专业代码:080615w 授予学位:工学学士 一、专业培养指导思想 遵循党和国家的教育方针,体现“两化融合”的时代精神,把握高等教育教学改革发展的规律与趋势,树立现代教育思想与观念,结合社会需求和学校实际,按照“打好基础、加强实践,拓宽专业、优化课程、提高能力”的原则,适应社会主义现代化建设和信息领域发展需要,德、智、体、美全面发展,具有良好的道德修养、科学文化素质、创新精神、敬业精神、社会责任感以及坚实的数理基础、外语能力和电子技术应用能力,系统地掌握专业领域的基本理论和基本知识,受到严格的科学实验训练和科学研究训练,能够在集成电路设计与集成系统领域,特别是通信专用集成电路与系统领域从事科学研究、产品开发、教学和管理等方面工作的高素质应用型人才。 二、专业培养目标 本专业学生的知识、能力、素质主要有:①较宽厚的自然科学理论基础知识、电路与系统的学科专业知识、必要的人文社会学科知识和良好的外语基础;②较强的集成电路设计和技术创新能力,具有通信、计算机、信号处理等相关学科领域的系统知识及其综合运用知识解决问题的能力;③较强的科学研究和工程实践能力,总结实践经验发现新知识的能力,掌握电子设计自动化(EDA)工具的应用;④掌握资料查询的基本方法和撰写科学论文的能力,了解本专业领域的理论前沿和发展动态;⑤良好的与人沟通和交流的能力,协同工作与组织能力;⑥良好的思想道德修养、职业素养、身心素质。毕业学生能够从事通信集成电路设计与集成系统的设计、开发、应用、教学和管理工作,成为具有奉献精神、创新意识和实践能力的高级应用型人才。 三、学制与学分 学制四年,毕业生应修最低学分198学分,其中必修课110学分,限选课36学分,任选课10学分,集中实践环节34学分,课外科技与实践活动8学分。
集成电路设计方法的发展历史
集成电路设计方法的发展历史 、发展现状、及未来主流设 计方法报告 集成电路是一种微型电子器件或部件,为杰克·基尔比发明,它采用一定的工艺,把一个电路中所需的晶体管、二极管、电阻、电容和电感等元件及布线互连一起,制作在一小块或几小块半导体晶片或介质基片上,然后封装在一个管壳内,成为具有所需电路功能的微型结构;其中所有元件在结构上已组成一个整体,使电子元件向着微小型化、低功耗和高可靠性方面迈进了一大步。集成电路具有体积小,重量轻,引出线和焊接点少,寿命长,可靠性高,性能好等优点,同时成本低,便于大规模生产。它不仅在工、民用电子设备如收录机、电视机、计算机等方面得到广泛的应用,同时在军事、通讯、遥控等方面也得到广泛的应用。用集成电路来装配电子设备,其装配密度比晶体管可提高几十倍至几千倍,设备的稳定工作时间也可大大提高。 一、集成电路的发展历史: 1947年:贝尔实验室肖克莱等人发明了晶体管,这是微电子技术发展中第一个里程碑; 1950年:结型晶体管诞生; 1950年: R Ohl和肖特莱发明了离子注入工艺; 1951
年:场效应晶体管发明; 1956年:C S Fuller发明了扩散工艺; 1958年:仙童公司Robert Noyce与德仪公司基尔比间隔数月分别发明了集成电路,开创了世界微电子学的历史; 1960年:H H Loor和E Castellani发明了光刻工艺;1962年:美国RCA公司研制出MOS场效应晶体管; 1963年:和首次提出CMOS技术,今天,95%以上的集成电路芯片都是基于CMOS工艺; 1964年:Intel摩尔提出摩尔定律,预测晶体管集成度将会每18个月增加1倍; 1966年:美国RCA公司研制出CMOS集成电路,并研制出第一块门阵列; 1967年:应用材料公司成立,现已成为全球最大的半导体设备制造公司; 1971年:Intel推出1kb动态随机存储器,标志着大规模集成电路出现; 1971年:全球第一个微处理器4004Intel公司推出,采用的是MOS工艺,这是一个里程碑式的发明; 1974年:RCA公司推出第一个CMOS微处理器1802; 1976年:16kb DRAM和4kb SRAM问世; 1978年:64kb动态随机存储器诞生,不足平方厘米的硅片上集成了14万个晶体管,标志着超大规模集成电路时
专用集成电路
实验一 EDA软件实验 一、实验目的: 1、掌握Xilinx ISE 9.2的VHDL输入方法、原理图文件输入和元件库的调用方法。 2、掌握Xilinx ISE 9.2软件元件的生成方法和调用方法、编译、功能仿真和时序仿真。 3、掌握Xilinx ISE 9.2原理图设计、管脚分配、综合与实现、数据流下载方法。 二、实验器材: 计算机、Quartus II软件或xilinx ISE 三、实验内容: 1、本实验以三线八线译码器(LS74138)为例,在Xilinx ISE 9.2软件平台上完成设计电 路的VHDL文本输入、语法检查、编译、仿真、管脚分配和编程下载等操作。下载芯片选择Xilinx公司的CoolRunner II系列XC2C256-7PQ208作为目标仿真芯片。 2、用1中所设计的的三线八线译码器(LS74138)生成一个LS74138元件,在Xilinx ISE 9.2软件原理图设计平台上完成LS74138元件的调用,用原理图的方法设计三线八线译 码器(LS74138),实现编译,仿真,管脚分配和编程下载等操作。 四、实验步骤: 1、三线八线译码器(LS 74138)VHDL电路设计 (1)三线八线译码器(LS74138)的VHDL源程序的输入 打开Xilinx ISE 6.2编程环境软件Project Navigator,执行“file”菜单中的【New Project】命令,为三线八线译码器(LS74138)建立设计项目。项目名称【Project Name】为“Shiyan”,工程建立路径为“C:\Xilinx\bin\Shiyan1”,其中“顶层模块类型(Top-Level Module Type)”为硬件描述语言(HDL),如图1所示。 图1 点击【下一步】,弹出【Select the Device and Design Flow for the Project】对话框,在该对话框内进行硬件芯片选择与工程设计工具配置过程。
介绍几种机器人驱动芯片
介绍几种机器人驱动芯片 作者:机器人发烧友 MONDAY, 08 SEPTEMBER 2003 05:28 在自制机器人的时候,选择一个合适的驱动电路也是非常重要的,本文详细介绍了几种常用的机器人驱动芯片。 介绍几种机器人驱动芯片 (注:本文已经投稿至《电子制作》) 在自制机器人的时候,选择一个合适的驱动电路也是非常重要的。最初,通常选用的驱动电路是由晶体管控制继电器来改变电机的转向和进退,这种方法目前仍然适用于大功率电机的驱动,但是对于中小功率的电机则极不经济,因为每个继电器要消耗20~100mA的电力。 当然,我们也可以使用组合三极管的方法,但是这种方法制作起来比较麻烦,电路比较复杂,因此,我在此向大家推荐的是采用集成电路的驱动方法: 马达专用控制芯片LG9110 芯片特点: ??低静态工作电流; ??宽电源电压范围:2.5V-12V; ??每通道具有800mA连续电流输出能力; ??较低的饱和压降; ??TTL/CMOS输出电平兼容,可直接连CPU;
??输出内置钳位二极管,适用于感性负载; ??控制和驱动集成于单片IC之中; ??具备管脚高压保护功能; ??工作温度:0℃-80℃。 描述: LG9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750~800mA 的持续电流,峰值电流能力可达1.5~2.0A;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。LG9110被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。 管脚定义: 1 A 路输出管脚、2和3电源电压、4 B路输出管脚、5和8地线、6 A路输入管脚、7 B路输入管脚 2、恒压恒流桥式1A驱动芯片L293 图2是其内部逻辑框图 图3是其与51单片机连接的电路原理图 L293是著名的SGS公司的产品,内部包含4通道逻辑驱动电路。其后缀有B、D、E 等,除L293E为20脚外,其它均为16引脚。其额定工作电流为1A,最大可达1.5A,Vss电压最小4.5V,最大可达36V;Vs电压最大值也是36V,但经过我的实验,Vs 电压应该比Vss电压高,否则有时会出现失控现象。下表是其使能、输入引脚和输出引脚的逻辑关系(电路按图3连接):
变频器驱动集成电路
IR三相逆变器驱动器集成电路 功率半导体专家国际整流器公司 (International Rectifier,简称IR) 推出IR2136三相逆变器驱动器集成电路系列,适用于变速电机驱动器设计。新器件集成了6个MOSFET或IGBT高电压栅驱动器,并融合多元化的保护功能,系统成本比光耦解决方案降低30%。 这些集成电路还有助简化电机驱动器设计,比同类解决方案节省30%的元件数目,还可将栅驱动电路的尺寸缩减一半。 IR2136集成电路系列适用于省电节能的电子驱动式变速电机,有助降低成本和简化电路结构。应用范围包括一般家用电器,如洗衣机及空调等,以及工业照明和汽车电机驱动器。 由于越来越多的电器制造商改用变速电机来设计产品,因为它能节省50%以上的能源,并能实现全新功能。例如,最新的节水型洗衣机便将高电压栅驱动器集成电路应用于省电节能的电子驱动型变速电机。IR最新的逆变器驱动器集成电路具备先进的工作和保护功能,可在竞争激烈的电器市场中,提供切合实际要求的变速电机技术。 全新600V IR2136集成电路能兼容CMOS输出或LSTTL输出,提供低至3.3V的逻辑,可直接接入微控制器或其它逻辑器件,并提供120mA/250mA输出源/承电流。此外,全新集成电路支持坚固耐用的设计,提供高达50V/ns dV/dt的耐量和较低的di/dt驱动电流,防止噪音干扰。 IR2136集成电路的性能超过光耦或变压器,并支持高频工作,死区时间低至250ns,一般接通/关断时间为400ns。 输出驱动器设有专为降低驱动器交叉传导的大脉冲电流缓冲级。该集成电路集成了交叉传导防护逻辑,以消除短路情况。单一集成电路封装内6个通道的传播延迟可互相配合,确保稳定的高频工作,从而在低速下发挥更完善的电机转矩性能,并降低可闻噪音。 新器件还可在过电流时切断6个输出电流,这项功能也可从外部电流传感电阻器产生。每当过电流或欠电压而导致工作停止时,主控制器会收到一个开漏故障信号,可同时关断全部6个输出。所有过电流状态都会经外设于R-C网络的延迟程序自动清除。 IR2136集成电路是专为2kW或以下的110V至360V输入逆变器设计,适用于交流感应、无刷直流或开关磁阻电机驱动。 IR2136集成电路基本规格如下: 产品编号封装电压 VS 输出源/承 电流 VCC 范围* VBS 范围* 死区 时间 电流脱 扣电平 IR2136 IR2136J IR2136S 28引线 PDIP 44引线 PLCC 28引线 SOIC 600V +120 / -250 mA 10~25V 备UVLO 10~25V 备UVLO 200ns 最小值 0.46V
集成电路设计方法--复习提纲
集成电路设计方法--复习提纲 2、实际约束:设计最优化约束:建立时钟,输入延时,输出延时,最大面积 设计规则约束:最大扇出,最大电容 39.静态时序分析路径的定义 静态时序分析通过检查所有可能路径上的时序冲突来验证芯片设计的时序正确性。时序路径的起点是一个时序逻辑单元的时钟端,或者是整个电路的输入端口,时序路径的终点是下一个时序逻辑单元的数据输入端,或者是整个电路的输出端口。 40.什么叫原码、反码、补码? 原码:X为正数时,原码和X一样;X为负数时,原码是在X的符号位上写“1”反码:X为正数是,反码和原码一样;X为负数时,反码为原码各位取反 补码:X为正数时,补码和原码一样;X为负数时,补码在反码的末位加“1” 41.为什么说扩展补码的符号位不影响其值? SSSS SXXX = 1111 S XXX + 1 —— 2n2n12n1例如1XXX=11XXX,即为XXX-23=XXX+23-24. 乘法器主要解决什么问题? 1.提高运算速度2.符号位的处理 43.时钟网络有哪几类?各自优缺点? 1. H树型的时钟
网络: 优点:如果时钟负载在整个芯片内部都很均衡,那么H 树型时钟网络就没有系统时钟偏斜。缺点:不同分支上的叶节点之间可能会出现较大的随机偏差、漂移和抖动。 2. 网格型的时钟网络 优点:网格中任意两个相近节点之间的电阻很小,所以时钟偏差也很小。缺点:消耗大量的金属资源,产生很大的状态转换电容,所以功耗较大。 3.混合型时钟分布网络优点:可以提供更小的时钟偏斜,同时,受负载的影响比较小。缺点:网格的规模较大,对它的建模、自动生成可能会存在一些困难。 总线的传输机制? 1. 早期:脉冲式机制和握手式机制。 脉冲式机制:master发起一个请求之后,slave在规定的t时间内返回数据。 握手式机制:master发出一个请求之后,slave在返回数据的时候伴随着一个确认信号。这样子不管外设能不能在规定的t时间内返回数据,master都能得到想要的数据。 2. 随着CPU频率的提高,总线引入了wait的概念 如果slave能在t时间内返回数据,那么这时候不能把wait信号拉高,如果slave不能在t时间内返回数据,那么必须在t时间内将wait信号拉高,直到slave将可以返回
液晶显示屏背光驱动集成电路工作原理
对“剖析液晶屏逻辑板TFT偏压电路”一文的一点看法(此文为技术探讨) 在国内某知名刊物2010年12月份期刊看到一篇关于介绍液晶屏逻辑板TFT偏压电路的文章,文章的标题是:“剖析液晶屏逻辑板TFT偏压电路”这是一篇选题极好的文章、目前液晶电视出现的极大部分屏幕故障例如:图像花屏、彩色失真、灰度失真、对比度不良、亮度暗淡、图像灰暗等等故障都与此电路有关,维修人员在维修此类故障时往往的面对液晶屏图像束手无策,而介绍此电路、无疑对类似故障的分析提供了极大的帮助,目前在一般的期刊书籍介绍分析此电路的文章极少。 什么是TFT屏偏压电路?现代的液晶电视都是采用TFT屏作为图像终端显示屏,由于我们现在的电视信号(包括各种视频信号)是专门为CRT显示而设计的,液晶屏和CRT的显示成像方式完全不同,液晶屏要显示专门为CRT而设计的电视信号,就必须对信号的结构、像素排列顺序、时间关系进行转换,以便液晶屏能正确显示。 图像信号的转换,这是一个极其复杂、精确的过程;先对信号进行存储,然后根据信号的标准及液晶屏的各项参数进行分析计算,根据计算的结果在按规定从存储器中读取预存的像素信号,并按照计算的要求重新组合排列读取的像素信号,成为液晶屏显示适应的信号。这个过程把信号的时间过程、排列顺序都进行了重新的编排,并且要产生控制各个电路工作的辅助信号。重新编
排的像素信号在辅助信号的协调下,施加于液晶屏正确的重现图像。 每一个液晶屏都必须有一个这样的转换电路,这个电路就是我们常说的“时序控制电路”或“T-CON(提康)电路”,也有称为“逻辑板电路”的。这个电路包括液晶屏周边的“行、列驱动电路”构成了一个液晶屏的驱动系统。也是一个独立的整体。这个独立的整体是由时序电路、存储电路、移位寄存器、锁存电路、D/A变换电路、译码电路、伽马(Gamma)电路(灰阶电压)等组成,这些电路的正常工作也需要各种不同的工作电压,并且还要有一定的上电时序关系,不同的屏,不同的供电电压。为了保证此电路正常工作,一般对这个独立的驱动系统单独的设计了一个独立的开关电源供电(这个向液晶屏驱动系统供电的开关电源一般就称为:TFT偏压电路);由整机的主开关电源提供一个5V或12V电压,给这个开关电源供电,并由CPU控制这个开关电源工作;产生这个独立的驱动系统电路提供所需的各种电压,就好像我们的电视机是一个独立的系统他有一个单独的开关电源,DVD机是一个独立的系统他也有一个单独的开关电源一样。是非常重要也是故障率极高的部分(开关电源都是故障率最高的部分,要重点考虑)。图1所示是液晶屏驱动系统框图。从图中可以看出,其中的“TFT偏压供电开关电源”就是这个独立系统电路的供电电源它产生这个驱动系统电路需要的各种电压,有VDD、VDA、VGL和VGH电压供各电路用。
集成电路设计流程
集成电路设计流程 . 集成电路设计方法 . 数字集成电路设计流程 . 模拟集成电路设计流程 . 混合信号集成电路设计流程 . SoC芯片设计流程 State Key Lab of ASIC & Systems, Fudan University 集成电路设计流程 . 集成电路设计方法 . 数字集成电路设计流程 . 模拟集成电路设计流程 . 混合信号集成电路设计流程 . SoC芯片设计流程 State Key Lab of ASIC & Systems, Fudan University 正向设计与反向设计 State Key Lab of ASIC & Systems, Fudan University 自顶向下和自底向上设计 State Key Lab of ASIC & Systems, Fudan University Top-Down设计 –Top-Down流程在EDA工具支持下逐步成为 IC主要的设计方法 –从确定电路系统的性能指标开始,自系 统级、寄存器传输级、逻辑级直到物理 级逐级细化并逐级验证其功能和性能 State Key Lab of ASIC & Systems, Fudan University Top-Down设计关键技术 . 需要开发系统级模型及建立模型库,这些行 为模型与实现工艺无关,仅用于系统级和RTL 级模拟。 . 系统级功能验证技术。验证系统功能时不必 考虑电路的实现结构和实现方法,这是对付 设计复杂性日益增加的重要技术,目前系统 级DSP模拟商品化软件有Comdisco,Cossap等, 它们的通讯库、滤波器库等都是系统级模型 库成功的例子。 . 逻辑综合--是行为设计自动转换到逻辑结构 设计的重要步骤 State Key Lab of ASIC & Systems, Fudan University
专用集成电路AD的设计
A/D转换器的设计 一.实验目的: (1)设计一个简单的LDO稳压电路 (2)掌握Cadence ic平台下进行ASIC设计的步骤; (3)了解专用集成电路及其发展,掌握其设计流程; 二.A/D转换器的原理: A/D转换器是用来通过一定的电路将模拟量转变为数字量。 模拟量可以是电压、电流等电信号,也可以是压力、温度、湿度、位移、声音等非电信号。但在A/D转换前,输入到A/D转换器的输入信号必须经各种传感器把各种物理量转换成电压信号。符号框图如下: 数字输出量 常用的几种A/D器为; (1):逐次比较型 逐次比较型AD由一个比较器和DA转换器通过逐次比较逻辑构成,从MSB 开始,顺序地对每一位将输入电压与内置DA转换器输出进行比较,经n次比较而输出数字值。其电路规模属于中等。其优点是速度较高、功耗低,在低分辩率(<12位)时价格便宜,但高精度(>12位)时价格很高。 (2): 积分型 积分型AD工作原理是将输入电压转换成时间(脉冲宽度信号)或频率(脉冲频率),然后由定时器/计数器获得数字值。其优点是用简单电路就能获得高分辨率,但缺点是由于转换精度依赖于积分时间,因此转换速率极低。初期的单片AD转换器大多采用积分型,现在逐次比较型已逐步成为主流。 (3):并行比较型/串并行比较型
并行比较型AD采用多个比较器,仅作一次比较而实行转换,又称FLash(快速)型。由于转换速率极高,n位的转换需要2n-1个比较器,因此电路规模也极大,价格也高,只适用于视频AD转换器等速度特别高的领域。 串并行比较型AD结构上介于并行型和逐次比较型之间,最典型的是由2个n/2位的并行型AD转换器配合DA转换器组成,用两次比较实行转换,所以称为Half flash(半快速)型。还有分成三步或多步实现AD转换的叫做分级型AD,而从转换时序角度又可称为流水线型AD,现代的分级型AD中还加入了对多次转换结果作数字运算而修正特性等功能。这类AD速度比逐次比较型高,电路规模比并行型小。 一.A/D转换器的技术指标: (1)分辨率,指数字量的变化,一个最小量时模拟信号的变化量,定义为满刻度与2^n的比值。分辨率又称精度,通常以数字信号的位数来表示。 (2)转换速率,是指完成一次从模拟转换到数字的AD转换所需的时间的倒数。积分型AD的转换时间是毫秒级属低速AD,逐次比较型AD是微秒级,属中速AD,全并行/串并行型AD可达到纳秒级。采样时间则是另外一个概念,是指两次转换的间隔。为了保证转换的正确完成,采样速率必须小于或等于转换速率。因此有人习惯上将转换速率在数值上等同于采样速率也是可以接受的。常用单位ksps 和Msps,表示每秒采样千/百万次。 (3)量化误差,由于AD的有限分辩率而引起的误差,即有限分辩率AD的阶梯状转移特性曲线与无限分辩率AD(理想AD)的转移特性曲线(直线)之间的最大偏差。通常是1 个或半个最小数字量的模拟变化量,表示为1LSB、1/2LSB。(4)偏移误差,输入信号为零时输出信号不为零的值,可外接电位器调至最小。(5)满刻度误差,满度输出时对应的输入信号与理想输入信号值之差。 (6)线性度,实际转换器的转移函数与理想直线的最大偏移,不包括以上三种误差。 三、实验步骤 此次实验的A/D转换器用的为逐次比较型,原理图如下:
常见液晶驱动芯片详解
常见液晶驱动芯片详解 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
本文主要是介绍一些常用的LCD驱动控制IC的型号,方便学习或正在使用的LCD的朋友能够更好地编写LCD的驱动程序。 因此各位朋友在选择LCD液晶模块的时候,在考虑到串行,还是并行的方式时,可根据其驱动控制IC的型号来判别,当然你还需要看你选择的LCD模块引脚定义是固定支持并行,还是可选择并行或串行的方式。 一、字符型LCD驱动控制IC 市场上通用的8×1、8×2、16×1、16×2、16×4、20×2、20×4、40×4等字符型LCD,基本上都采用的KS0066作为LCD的驱动控制器 二、图形点阵型LCD驱动控制IC 1、点阵数122×32--SED1520 2、点阵数128×64 (1)ST7920/ST7921,支持串行或并行数据操作方式,内置中文汉字库 (2)KS0108,只支持并行数据操作方式,这个也是最通用的12864点阵液晶的驱动控制IC (3)ST7565P,支持串行或并行数据操作方式 (4)S6B0724,支持串行或并行数据操作方式 (5)T6963C,只支持并行数据操作方式 3、其他点阵数如192×6 4、240×64、 320×64、240×128的一般都是采用T6963c驱动控制芯片 4、点阵数320×240,通用的采用RA8835驱动控制IC
这里列举的只是一些常用的,当然还有其他LCD驱动控制IC,在写LCD驱动时要清楚是哪个型号的IC,再到网上去寻找对应的IC数据手册吧。后面我将慢慢补上其它一些常见的. 三 12864液晶的奥秘 CD1601/1602和LCD12864都是通常使用的液晶,有人以为12864是一个统一的编号,主要是12864的液晶驱动都是一样的,其实12864只是表示液晶的点阵是128*64点阵,而实际的12864有带字库的,也有不带字库的;有5V电压的,也有~5V(内置升压电路);归根到底的区别在于驱动控制芯片,常用的控制芯片有ST7920、KS0108、 T6963C等等。 下面介绍比较常用的四种 (1)ST7920类这种控制器带中文字库,为用户免除了编制字库的麻烦,该控制器的液晶还支持画图方式。该类液晶支持68时序8位和4位并口以及串口。 (2)KS0108类这种控制器指令简单,不带字库。支持68时序8位并口。 (3)T6963C类这种控制器功能强大,带西文字库。有文本和图形两种显示方式。有文本和图形两个图层,并且支持两个图层的叠加显示。支持80时序8位并口。 (4)COG类常见的控制器有S6B0724和ST7565,这两个控制器指令兼容。支持68时序8位并口,80时序8位并口和串口。COG类液晶的特点是结构轻便,成本低。 各种控制器的接口定义: 引脚定义 PSB是ST7920类液晶的标志性引脚;
集成电路的设计方法探讨
集成电路的设计方法探讨 摘要:21世纪,信息化社会到来,时代的进步和发展离不开电子产品的不断进步,微电子技术对于各行各业的发展起到了极大的推进作用。集成电路(integratedcircuit,IC)是一种重要的微型电子器件,在包括数码产品、互联网、交通等领域都有广泛的应用。介绍集成电路的发展背景和研究方向,并基于此初步探讨集成电路的设计方法。 关键词集成电路设计方法 1集成电路的基本概念 集成电路是将各种微电子原件如晶体管、二极管等组装在半导体晶体或介质基片上,然后封装在一个管壳内,使之具备特定的电路功能。集成电路的组成分类:划分集成电路种类的方法有很多,目前最常规的分类方法是依据电路的种类,分成模拟集成电路、数字集成电路和混合信号集成电路。模拟信号有收音机的音频信号,模拟集成电路就是产生、放大并处理这类信号。与之相类似的,数字集成电路就是产生、放大和处理各种数字信号,例如DVD重放的音视频信号。此外,集成电路还可以按导电类型(双极型集成电路和单极型集成电路)分类;按照应用领域(标准通用集成电路和专用集成电路)分类。集成电路的功能作用:集成电路具有微型化、低能耗、寿命长等特点。主要优势在于:集成电路的体积和质量小;将各种元器件集中在一起不仅减少了外界电信号的干扰,而且提高了运行
速度和产品性能;应用方便,现在已经有各种功能的集成电路。基于这些优异的特性,集成电路已经广泛运用在智能手机、电视机、电脑等数码产品,还有军事、通讯、模拟系统等众多领域。 2集成电路的发展 集成电路的起源及发展历史:众所周知,微电子技术的开端在1947年晶体管的发明,11年后,世界上第一块集成电路在美国德州仪器公司组装完成,自此之后相关的技术(如结型晶体管、场效应管、注入工艺)不断发展,逐渐形成集成电路产业。美国在这一领域一直处于世界领先地位,代表公司有英特尔公司、仙童公司、德州仪器等大家耳熟能详的企业。集成电路的发展进程:我国集成电路产业诞生于六十年代,当时主要是以计算机和军工配套为目标,发展国防力量。在上世纪90年代,我国就开始大力发展集成电路产业,但由于起步晚、国外的技术垄断以及相关配套产业也比较落后,“中国芯”始终未能达到世界先进水平。现阶段我国工业生产所需的集成电路主要还是依靠进口,从2015年起我国集成电路进口额已经连续三年比原油还多,2017年的集成电路进口额超过7200亿元。因此,在2018年政府工作报告中把推动集成电路产业发展放在了五大突出产业中的首位,并且按照国家十三五规划,我国集成电路产业产值到2020年将会达到一万亿元。中国比较大型的集成电路设计制造公司有台积电、海思、中兴等,目前已在一些技术领域取得了不错的成就。集成电路的发展方向:提到集成电路的发展,就必须要说到摩尔定律:集成度每18个月翻一番。而现今正处在
几种自制机器人驱动功放芯片电路
在自制机器人的时候,选择一个合适的驱动电路也是非常重要的,本文详细介绍了几种常用的机器人驱动芯片。 介绍几种机器人驱动芯片 在自制机器人的时候,选择一个合适的驱动电路也是非常重要的。最初,通常选用的驱动电路是由晶体管控制继电器来改变电机的转向和进退,这种方法目前仍然适用于大功率电机的驱动,但是对于中小功率的电机则极不经济,因为每个继电器要消耗20~100mA 的电力。 当然,我们也可以使用组合三极管的方法,但是这种方法制作起来比较麻烦,电路比较复杂,因此,我在此向大家推荐的是采用集成电路的驱动方法: 马达专用控制芯片LG9110 芯片特点: ??低静态工作电流; ??宽电源电压范围:2.5V-12V ; ??每通道具有800mA 连续电流输出能力; ??较低的饱和压降; ??TTL/CMOS 输出电平兼容,可直接连CPU ; ??输出内置钳位二极管,适用于感性负载; ??控制和驱动集成于单片IC 之中; ??具备管脚高压保护功能; ??工作温度:0 ℃-80 ℃。 描述: LG9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750 ~800mA 的持续电流,峰值电流
能力可达1.5 ~2.0A ;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。LG9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。管脚定义: 1 A 路输出管脚、2和3 电源电压、4 B 路输出管脚、5和8 地线、6 A 路输入管脚、7 B 路输入管脚 2、恒压恒流桥式1A驱动芯片L293 图2是其内部逻辑框图 图3是其与51单片机连接的电路原理图
MC33035是MOTOROLA公司第二代无刷直流电动机控制专用集成电路,外接
MC33035是MOTOROLA公司第二代无刷直流电动机控制专用集成电路,外接功率开关器件和电子测速器MC33039,可构成闭环调速系统来控制三相(全波或半波)、两相或四相无刷直流电机。它通过下侧半桥输出PWM对电机进行调速。 2MC33035的功能和组成 2.1功能 ——可控制电机正反转; ——实现电机刹车制动; ——启停功能; ——可选择三相无刷直流电机传感器相位差60°或120°; ——欠压封锁保护,IC过热保护和故障输出。 2.2组成 ——转子位置传感器译码电路; ——限流电路; ——具有温度补偿的6.24V内部基准电源; ——RT、CT可变锯齿波振荡电路; ——脉宽调制比较器; ——误差放大器; ——输出驱动电路; ——欠压、过热保护以及故障电平输出。
2.3引脚功能 参见表1。 表 1 MC33035的引脚功能 3MC33035的应用
图1是MC33035与MC33039构成的闭环三相无刷直流电机控制电路图。 其电路各部分功能介绍: 1)脚4、5、6是传感器位置信号输入,MC33035通过对输入位置信号译码对应输出驱动电机。这三个信号与TTL电平兼容。当输入全“0”或“1”表示非法信号。故障输出端(引脚14)输出有效低电平。通过选择引脚22来确定输入三相信号相位差为60°还是120°。 2)阻容RT、CT与内部振荡器产生锯齿波,作为PWM载波信号。锯齿波幅值为1.5V~4.1V。为防止噪声干扰,载波频率不宜过低,但频率太高容易使功率管过热,建议载波频率为20kHz~30kHz。锯齿波是由引脚8输出6.24V参考电压经RT对CT充电,通过内部电路放电所产生。由引脚11给定速度电压以及来自MC33039引脚5的速度方波信号经积分形成斩波信号与锯齿波形成PWM,参见图2,CT、误差输出PWM、内部锁存、上桥、下桥、错误信号对应时间关系如图3。构成闭环的主要原理是当负载改变(如变大),则电机速度下降,测速器MC33039引脚5输出方波密度变低,此信号经积分形成斩波信号后幅值抬高,则使输出PWM占空比加大,输出电流增加,自然速度逐渐提高,以达到输出跟踪输入。