UG刚柔耦合仿真分析

1.In this lesson
After completing this lesson, you will be able to:
?Create an SEMODES 103 – Flexible Body solution in Advanced Simulation. ?Connect the flexible body finite element model to the degrees of freedom in the motion mechanism.
?Solve the finite element model and generate the RecurDyn Rflex input file.?Define the flexible body in Motion Simulation and solve the motion mechanism.
?Animate the motion mechanism and observe the flexible body deformation.
??2. Overview
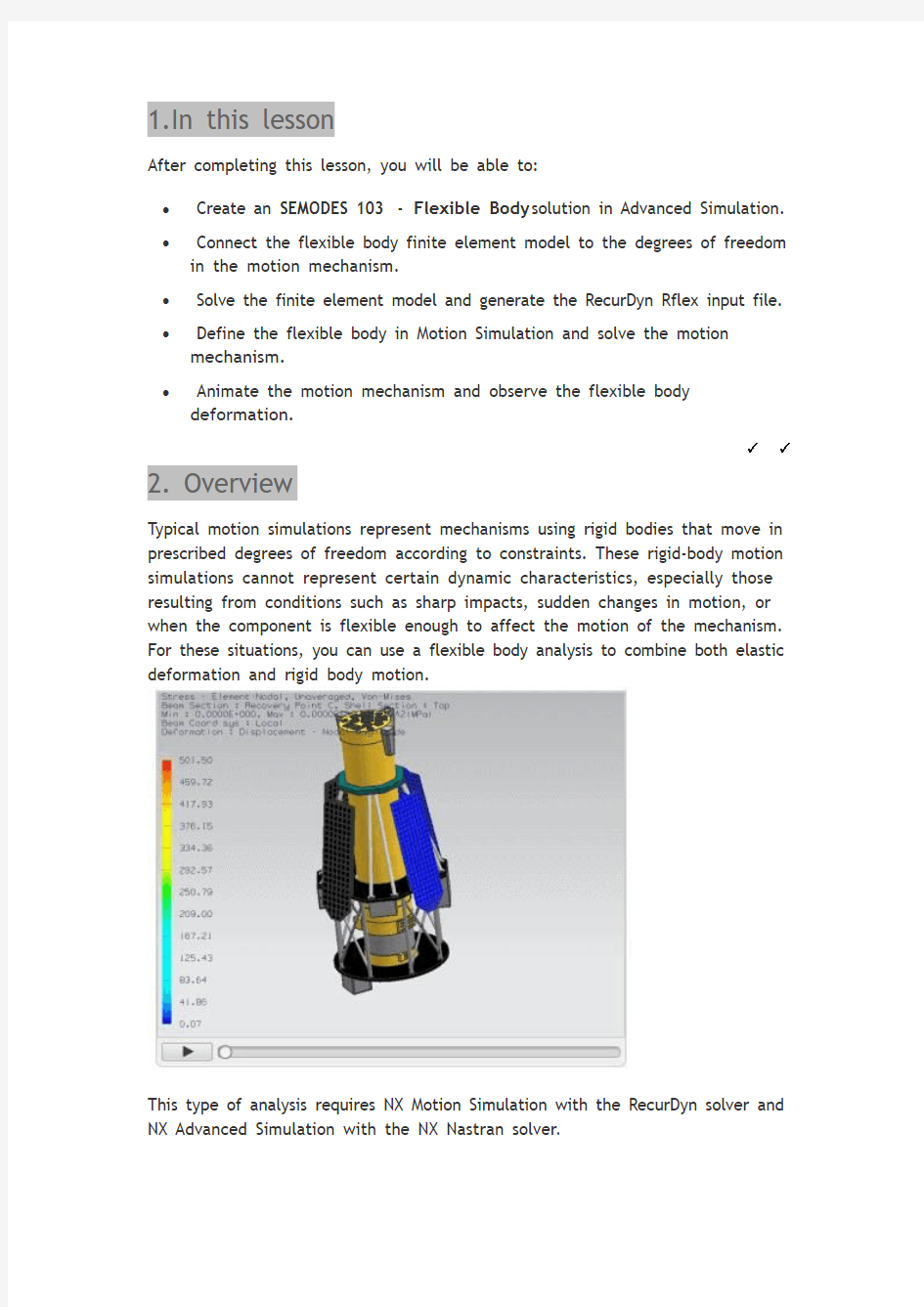
Typical motion simulations represent mechanisms using rigid bodies that move in prescribed degrees of freedom according to constraints. These rigid-body motion simulations cannot represent certain dynamic characteristics, especially those resulting from conditions such as sharp impacts, sudden changes in motion, or when the component is flexible enough to affect the motion of the mechanism. For these situations, you can use a flexible body analysis to combine both elastic deformation and rigid body motion.
This type of analysis requires NX Motion Simulation with the RecurDyn solver and NX Advanced Simulation with the NX Nastran solver.
T o set up a flexible body analysis for a component in your mechanism, you create a finite element model on the component and define stiffness at the points where it is connected to the mechanism (typically at joint locations). The NX Nastran SEMODES 103 – Flexible Body solution reduces the dynamic behavior of the flexible body to a set of mode shapes, which are stored in an output file. After you solve this modal solution, you associate the flexible body output file (.rfi file) with the link on which the component is defined in the motion simulation. When you solve the motion simulation, the RecurDyn solver communicates with NX Nastran and recovers the FE results. When you animate the mechanism, the contour plot for the flexible component is animated along with the rigid body animation.
3. Workflow
Advanced Simulation steps
1.Create a finite element model and NX Nastran SEMODES 103 – Flexible
Body solution.
2.Create a finite element mesh on the flexible component and assign
material properties.
https://www.360docs.net/doc/eb9151619.html,e a 1D Connection (spider element) or other constraint elements to
define the component's connection points to the mechanism.
4.Add Fixed Boundary Degrees of Freedom constraints to define
connection degrees of freedom.
5.Add Free Boundary Degrees of Freedom constraints to define load
degrees of freedom.
6.Solve the modal solution. A RecurDyn Rflex input (.rfi) file is generated
for the flexible link.
7.Repeat steps 1–6 for each additional flexible component in the
mechanism.
Motion Simulation steps
1.Create a Flexible Body Dynamics motion simulation.
2.Create flexible links on the flexible components. Associate each .rfi file
with each flexible link.
3.Create a Flexible Body solution and add the flexible links to the solution.
4.Solve the mechanism.
5.Run Animation to view the combined rigid body and flexible body motion.
6.Plot the modal degrees of freedom vs. time to determine the contribution
of selected modes to the flexible body results.
You can select one or more modes of the flexible body and then plot the modal displacement, acceleration, or velocity.
4. Activity: Flexible body analysis — Introduction
Estimated time to complete: 12–16 minutes
You will learn how to:
Define the flexible body in Motion Simulation and solve the
motion mechanism.
Animate the motion mechanism and observe the flexible body
deformation.
Note T o complete this activity, you must have the nx_motion_rflex license, in addition to Motion Simulation, Advanced Simulation, and NX Nastran.
Launch the Flexible body analysis — Introduction activity.
5. About the flexible body modal solution
You will use the Advanced Simulation application to create a finite element model of the flexible body and perform a modal analysis. A modal analysis solves for the natural frequencies and mode shapes of flexible bodies.
The NX Nastran SEMODES 103 – Flexible Body modal solution reduces the flexible body's mass and stiffness to modal space to represent its dynamic behavior. These reduced matrices are saved in the RecurDyn Rflex input file (.rfi).
Then, in Motion Simulation, you associate the .rfi file with a link to create the flexible link.
Example mode shapes
6. About the finite element mesh
The finite element model of a given body consists of a finite element mesh, material properties, and constraints.
When you create a mesh on the body, the software divides the body into discrete regions called elements that are joined together at points called nodes. A group of elements is called a mesh.
The mesh follows the shape of the body. When the model is solved, as the nodes in the mesh are displaced due to the analysis conditions such as loads, the behavior of each element is described by mathematical equations. The software finds the analysis solution by summing the individual element solutions.
Example mesh of tetrahedral elements
In Advanced Simulation, you create the mesh in the FEM file.
When you use a smaller element size (resulting in more elements in a mesh), the accuracy of the solution is improved. However, as you refine the mesh, the solution time and computer resources needed to solve are also increased.
7. Assigning a material to the mesh
In Motion Simulation, material properties for a component are inherited from the master model on which you create the simulation. In Advanced Simulation, you must assign the same material to the flexible body finite element mesh as the material used for the flexible link in Motion Simulation.
T o assign a material to the mesh, edit the mesh collector that contains the mesh. Then, modify the physical property table for the collector and open the Material List dialog box, where you can select the material to use.
8. Connecting the flexible body FEM to the mechanism
In Advanced Simulation, in the FEM file, you must define the points where the flexible body is connected to the motion mechanism. These connection points must be defined at the origin point of every joint, bushing, force, torque, spring, or damper motion object on the flexible body.
Although you can use any element type to define these connection points, typically you will use a 1D Connection (spider element).
For accuracy in your flexible body solution, a single independent node (such as the core node of the spider element) in this connection element should be coincident with the motion object's origin point. You will define stiffness at this connection node using special constraints described in the next section.
Spider elements defined at revolute joint locations
Make sure the connection node is at a location that creates balanced loading. For example, suppose you are connecting the flexible body to a revolute joint that is defined on a hole. Define the connection node in the bore center of the hole, rather than at the edge of the hole.
Example of pinned connection (Revolute joint defined at bore center of hole)
Connection node improperly defined at edge of hole
Connection node properly defined at bore center of hole
9. Defining connection and load degrees of freedom In Advanced Simulation, in the Simulation file, you must add special constraints to define the connection and load degrees of freedom for the flexible body.
?At each connection node where the flexible body will be connected to the mechanism through a joint or bushing in Motion Simulation, create a Fixed Boundary Degrees of Freedom constraint to define the connection degrees of freedom.
?At each connection node where a force, torque, spring, or damper will be applied to the flexible body in Motion Simulation, create a Free Boundary Degrees of Freedom constraint to define the load degrees of freedom.
10. Solving the NX Nastran modal solution
In the Solution dialog box for the SEMODES 103 – Flexible Body solution, you must specify the number of modes for which to solve and the result types to recover. By default, stress and displacement results are selected.
After you have defined the finite element mesh, connection and load degrees of freedom, and solution attributes (such as the number of desired modes), you can solve the model.
The solve produces several results files that you must not delete, move, or rename:
?.dat — Nastran input file, needed for later results recovery.
?.op2 — Contains the model geometry and component modes resulting from the modal analysis.
?_0.op2 — Needed for later results recovery; contains the component mode definitions, modal mass, and modal stiffness.
?.rfi — RecurDyn Rflex input file, needed for representing the flexible body in the RecurDyn solve.
Remember the location of the .rfi file because you will need to point to it when creating the flexible link in Motion Simulation.
11. Review
Question
In the following example, suppose you are defining this excavator bucket as
a flexible body in Advanced Simulation. In the motion mechanism, a single revolute joint is defined between the two holes (1 in the graphic below) at the top of the bucket. A force load is applied to one of the teeth (2).
In Advanced Simulation, which constraints must you apply before solving the SEMODES 103 – Flexible Body solution? 2
A Fixed Translation constraint and a Pinned constraint
A Fixed Boundary Degrees of Freedom constraint and a Free Boundary Degrees of Freedom constraint
A User Defined constraint and a Pinned constraint
T wo Fixed constraints
After solving the SEMODES 103 – Flexible Body solution, when you create the flexible link in Motion Simulation, what file must you associate with the link to represent the dynamic behavior of the flexible body in the
mechanism?
The .RFI file
The .DAT file (Nastran input deck)
The .OP2 file
The .MDF file
?Show feedback
12. Activity: Flexible body analysis — Advanced Simulation tasks
Estimated time to complete: 12–16 minutes
You will learn how to:
Create an SEMODES 103 – Flexible Body solution in Advanced
Simulation and specify a body as flexible.
Connect the flexible body finite element model to the degrees
of freedom in the motion mechanism.
Solve the finite element model and generate the RecurDyn
Rflex input file.
Note T o complete this activity, you must have the nx_motion_rflex license, in addition to Motion Simulation, Advanced Simulation, and NX Nastran.
Launch the Flexible body analysis — Advanced Simulation tasks
activity.
13. Defining the flexible link in the mechanism
In Motion Simulation, you must create a Flexible Link that is associated with the component or body that you defined as flexible in Advanced Simulation.
In the Flexible Link dialog box, you associate the link with the RecurDyn input file (.rfi file) generated by the NX Nastran modal solution. The Flexible Link Preview window helps you determine the correct method for positioning the flexible body on the link.
In the graphics window, the flexible link is displayed with its finite element mesh.
Meshed flexible link defined in the mechanism (and Preview view)
14. Choosing modes to include in the analysis
By default, all modes from the NX Nastran modal solution are included in the motion simulation solve except the first six modes, which are considered
rigid-body modes.
Including all modes ensures a more accurate representation of the structure. However, for better solve performance, you can reduce the modal model by removing insignificant modes.
T o determine which modes to remove, you can view and animate the mode shapes using the Post Processing Navigator and Post Processing toolbar. Make sure to include all modes that resemble the behavior you are analyzing.
Example mode shape
??15. Solving the model and animating the mechanism
In Motion Simulation, you create a Kinematics/Dynamics solution of type Flexible Body.
When you solve the Flexible Body solution, the RecurDyn solver calculates the physical deformations at each point where the flexible body is connected to the rest of the mechanism, for each configuration of the motion mechanism. It saves these deformations in a modal deformation file (.mdf).
Using the .mdf file, the motion solution process calls the NX Nastran solver to recover the deformation, displacement, stress, and other results on the original, unreduced flexible body. These transient results are then returned to Motion Simulation, where you can view them in an animation of the mechanism.
By default, when you animate a flexible body solution, translational deformation results (nodal displacements) are displayed for the flexible body. You can also display other results, such as Displacement – Nodal, Stress – Element – Nodal and Strain – Element – Nodal, depending on the results you requested in the output request for the SEMODES 103 – Flexible Body solution in Advanced Simulation.
16. Activity: Flexible body analysis — Motion Simulation tasks
Estimated time to complete: 12–16 minutes
You will learn how to:
Define the flexible body in Motion Simulation and solve the
motion mechanism.
Animate the motion mechanism and observe the flexible body
deformation and stress.
Run an interference check between the flexible link and a body
panel.
Note T o complete this activity, you must have the nx_motion_rflex license, in addition to Motion Simulation, Advanced Simulation, and NX Nastran.
Launch the Flexible body analysis — Motion Simulation tasks
activity.
Flexible body analysis — Introduction
1. Open the Motion Simulation
Open (Standard toolbar)
?
?
?
?
OK
?
The motion simulation opens in the Motion Simulation application.
2. Reset the dialog box settings
The options you select in NX dialog boxes are preserved for the next time you open the same dialog box within an NX session. To ensure that the dialog boxes are in the expected initial state for each step-by-step activity, you should restore the default settings.
Preferences→User Interface
?
Reset Dialog Box Settings
?
OK
3. Enable the Flexible Body Dynamics environment The Flexible Body Dynamics environment is available only with the Dynamics analysis type.
Environment (Motion toolbar)
?
Flexible Body Dynamics
?
OK
??4. Define the flexible link
Flexible Link (Motion toolbar)
?
?
Flexible Model
?Browse
?intro_flex_body/fbcam_assy_sim2-solution_1_0.rfi
This pre-generated file contains a modal reduction of the flexible body's mass and stiffness, which represen ts the body’s dynamic behavior. The NX Nastran solver generates these reduced matrices and saves them in a RecurDyn Rflex input (RFI) file. In a later activity, you will solve an NX Nastran solution and generate an RFI file.
?
OK RFI File dialog box
Leave the Flexible Link dialog box open for the next step.
5. Finish defining the flexible link
The Flexible Link dialog box is still open from the previous step.
?The Flexible Link Preview window shows you the meshed flexible body and its orientation relative to the absolute coordinate system.
?
?Because the flexible body is in the same orientation relative to the absolute coordinate system as the corresponding link in the mechanism, Absolute Origin is the appropriate selection.
?
OK Flexible Link dialog box
6. Create a Flexible Body solution
Motion Navigator
?motion_1
?New Solution
?
?
?
?
?
OK
7. Add the flexible link to the solution
Motion Navigator
?Flexible Links
?L002–fbcam_assy_sim2-solution_1
?Add to Solution
8. Solve the motion simulation
Motion Navigator
?Load Container
?G002
?Add to Solution
For illustration purposes, this vector force simulates a load on the clevis in the X direction, to exaggerate the flexible behavior.
?Solution_2
?Solve
The solve process may take several minutes to complete. After the RecurDyn solve finishes, NX Nastran is called automatically to run the SEMODES 103 –Flexible Body solve. Nastran uses the RecurDyn results file and the original NX Nastran input file to recover the deformation, displacement, stress and other results for the flexible link.
Caution Do NOT close any solve windows until all NX Nastran command prompt windows have closed and the message ―Nastran results
recovery completed‖ appears in the NX status line.
9. Animate the mechanism
转向节的结构设计与强度分析--开题报告
杭州电子科技大学 毕业设计(论文)开题报告题目转向节的结构设计和强度分析 学院机械工程学院 专业车辆工程 姓名吴志军 班级车辆二班(07010512) 学号07010570 指导教师胡彦超
一、本课题国内外研究动态及选题的依据和意义 (一)课题研发背景 汽车是重要的运输工具,是科学技术发展水平的标志。同时也是20世纪最显著的人文标志之一。它改变了人们的生活方式、时空和价值观念。为人类社会的物质财富和精神文明做出了巨大的贡献。汽车是产业关联度高、规模效益明显、资金和技术密集的重要产品,又是唯一兼有大批量、高精度、群众性消费特征的全球化产业,也是唯一的一种零件以万计、产量以百万计、保有量以亿计,并惠及全人类的高科技产品。汽车工业由于其资金密集、技术密集、人才密集、综合性强、经济效益高的特点,使得世界各个工业发达国家几乎无一例外地把汽车工业作国民经济的支柱产业。汽车的研制、生产、销售、运营,与国民经济许多部门都息息相关,对社会经济建设和科学技术发展起着重要的推动作用。 转向节是汽车上的关键零件,它既支撑车体重量,又传递转向力矩和承受前轮刹车制动力矩,因此对其机械性能和外形结构要求严格,是汽车上的重要安全零件之一。转向节包括转向节轴和转向节臂。转向节一般采用锻造毛坯件,经机械加工成为一个复杂的空间受力件。转向节圆锥轴上装有一对单列圆锥滚子轴承,使转向节与前轮毂、前轮制动器相连。其圆锥轴端采用螺母紧固轴承与轮毂,这样就能使转向节承受来自地面的支承力、滚动阻力和制动力。其上端球销通过纵向拉力杆与车架连接于一体,并与整车相连,从而约束了转向节沿x、y方向的位移和转动,使其仅能沿z方向移动和旋转。转向节的转向节臂上有两个球头销分别与转向纵拉杆、横拉杆相连以保证左右两轮同步转向。由此可见,转向节承受着车辆转向系统较大的负荷。 (二)转向节国内外研发现状 由于汽车转向节使用的重要性和形状的特殊性,国内外对转向节的结构和强度分析予以高度的重视,对其进行了深入的研究,取得了一定的研究成果。 在国内,北京机电研究所、吉林工业大学、机械工业部第四设计院、中国重汽公司、山东光岳转向节总厂、安庆百协锻造厂等单位对转向节进行了比较深入研究。郑州轻工业学院机电工程学院的韩国立等提出了概率有限元分析,并得出影响其可靠性的主要因素是外负荷和弹性模量。河南师范学院的冯彬彩建立了斯太尔转向节的实体模型,并对转向节的受力依照紧急制动工况、侧滑工况和越过不平路面工况等三种危险工况进行强度分析。合肥工业大学机械与汽车工程学院的张红旗等实用ANSYS对客车转向节进行了受力分析。天津大学武一民等利用NSRAN—PARTAN对农用车转向节结构进行了有限元计算,并对结构变化对应力分布的影响进行了计算.同济大学汽车学院的蔡智健等通过有限元建立某轿车转向节模型。机械加工方面,佳木斯煤矿机械厂的张风岩等对转向节的机械加工进行了有效的研究,极大提高了生产效率。这些研究工作对汽车转向节设计生产提供了宝贵的经验。
模态分析有限元仿真分析学习心得
有限元仿真分析学习心得 1 有限元分析方法原理 有限元分析(FEA,Finite Element Analysis)利用数学近似的方法对真实物理系统(几何和载荷工况)进行模拟。还利用简单而又相互作用的元素,即单元,就可以用有限数量的未知量去逼近无限未知量的真实系统。 有限元法是随着电子计算机发展而迅速发展起来的一种工程力学问题的数值求解方法。20世纪50年代初,它首先应用于连续体力学领域—飞机结构静、动态特性分析之中,用以求得结构的变形、应力、固有频率以及阵型。由于其方法的有效性,迅速被推广应用于机械结构分析中。随着电子计算机的发展,有限元法从固体力学领域扩展到流体力学、传热学、电磁学、生物工程学、声学等。 随着计算机科学与应用技术的发展,有限元理论日益完善,随之涌现了一大批通用和专业的有限元计算软件。其中,通用有限元软件以ANSYS,MSC公司旗下系列软件为杰出代表,专业软件以ABAQUS、LS-DYNA、Fluent、ADAMS 为代表。 ANSYS作为最著名通用和有效的商用有限元软件之一,集机构、传热、流体、电磁、碰撞爆破分析于一体,具有强大的前后处理及计算分析能力,能够进行多场耦合,结构-热、流体-结构、电-磁场的耦合处理求解等。 有限元分析一般由以下基本步骤组成: ①建立求解域,并将之离散化成有限个单元,即将问题分解成单元和节点; ②假定描述单元物理属性的形(shape)函数,即用一个近似的连续函数描述每个单元的解; ③建立单元刚度方程; ④组装单元,构造总刚度矩阵; ⑤应用边界条件和初值条件,施加载荷; ⑥求解线性或者非线性微分方程组得到节点值,如不同节点的位移; ⑦通过后处理获得最大应力、应变等信息。 结构的离散化是有限元的基础。所谓离散化就是将分析的结构分割成为有限
UG有限元分析教程
第1章高级仿真入门 在本章中,将学习: ?高级仿真的功能。 ?由高级仿真使用的文件。 ?使用高级仿真的基本工作流程。 ?创建FEM和仿真文件。 ?用在仿真导航器中的文件。 ?在高级仿真中有限元分析工作的流程。 1.1综述 UG NX4高级仿真是一个综合性的有限元建模和结果可视化的产品,旨在满足设计工程师与分析师的需要。高级仿真包括一整套前处理和后处理工具,并支持广泛的产品性能评估解法。图1-1所示为一连杆分析实例。 图1-1连杆分析实例 高级仿真提供对许多业界标准解算器的无缝、透明支持,这样的解算器包括NX Nastran、MSC Nastran、ANSYS和ABAQUS。例如,如果结构仿真中创建网格或解法,则指定将要用于解算模型的解算器和要执行的分析类型。本软件使用该解算器的术语或“语言”及分析类型来展示所有网格划分、边界条件和解法选项。另外,还可以求解模型并直接在高级仿真中查看结果,不必首先导出解算器文件或导入结果。 高级仿真提供基本设计仿真中需要的所有功能,并支持高级分析流程的众多其他功能。 ?高级仿真的数据结构很有特色,例如具有独立的仿真文件和FEM文件,这有利于在分布式工作环境中开发有限元(FE)模型。这些数据结构还允许分析师轻松 地共享FE数据去执行多种类型分析。
UG NX4高级仿真培训教程 2 ?高级仿真提供世界级的网格划分功能。本软件旨在使用经济的单元计数来产生高质量网格。结构仿真支持完整的单元类型(1D、2D和3D)。另外,结构级仿真 使分析师能够控制特定网格公差。例如,这些公差控制着软件如何对复杂几何体 (例如圆角)划分网格。 ?高级仿真包括许多几何体简化工具,使分析师能够根据其分析需要来量身定制CAD几何体。例如,分析师可以使用这些工具提高其网格的整体质量,方法是消 除有问题的几何体(例如微小的边)。 ?高级仿真中专门包含有新的NX传热解算器和NX流体解算器。 NX传热解算器是一种完全集成的有限差分解算器。它允许热工程师预测承受热载荷系统中的热流和温度。 NX流体解算器是一种计算流体动力学(CFD)解算器。它允许分析师执行稳态、不可压缩的流分析,并对系统中的流体运动预测流率和压力梯度,也可 以使用NX传热和NX流体一起执行耦合传热/流体分析。 1.2仿真文件结构 当向前通过高级仿真工作流时,将利用4个分离并关联的文件去存储信息。要在高级仿真中高效地工作,需要了解哪些数据存储在哪个文件中,以及在创建那些数据时哪个文件必须是激活的工作部件。这4个文件平行于仿真过程,如图1-2所示。 图1-2仿真文件结构 设计部件文件的理想化复制 当一个理想化部件文件被建立时,默认有一.prt扩展名,fem#_i是对部件名的附加。例如,如果原部件是plate.prt,一个理想化部件被命名为plate_fem1_i.prt。 一个理想化部件是原设计部件的一个相关复制,可以修改它。 理想化工具让用户利用理想化部件对主模型的设计特征做改变。不修改主模型部件,
ansys实验强度分析报告
ansys有限元强度分析 一、实验目的 1 熟悉有限元分析的基本原理和基本方法; 2 掌握有限元软件ANSYS的基本操作; 3 对有限元分析结果进行正确评价。 二、实验原理 利用ANSYS进行有限元静力学分析 三、实验仪器设备 1 安装windows XP的微机; 2 ANSYS11.0软件。 四、实验内容与步骤 1 熟悉ANSYS的界面和分析步骤; 2 掌握ANSYS前处理方法,包括三维建模、单元设置、网格划分和约束设置;3掌握ANSYS求解和后处理的一般方法; 4 实际应用ANSYS软件对六方孔螺钉头用扳手进行有限元分析。 五、实验报告 1)以扳手零件为例,叙述有限元的分析步骤; 答:(1)选取单元类型为92号; (2)定义材料属性,弹性模量和泊松比;
建立模型。先生成一个边长为0.0058的六边形平面,再创建三条线,其中z向长度为0.19,x向长度0.075,中间一段0.01的圆弧,然后把面沿着三条线方向拉伸,生成三维实体1如题中所给形状,只是手柄短了0.01;把坐标系沿z轴方向平移0.01,再重复作六边形面,拉伸成沿z轴相反方向的长为0.01的实体2;利用布尔运算处理把实体1和2粘接成整体。 (4)划分网格。利用智能网格划分工具划分网格,网格等级为4级。
(5)施加约束。在扳手底部面上施加完全约束; (6)施加作用力。在实体2的上部面上施加344828pa(20/(0.01*0.0058))的压强,在实体2的下部面的临面上施加1724138pa(100/0.01/0.0058)的压强;
(7)求解,进入后处理器查看求解结果,显示应力图。 2)对扳手零件有限元分析结果进行评价; 答:结果如图所示: 正确的显示出了受力的最大位置及变形量,同时给出了各处受力的值,分析结果基本正确,具有一定的参考意义。
UG NX 高级仿真在压力容器中的应用
UG NX 高级仿真 在压力容器应力分析中的应用 闫硕 (沧州市设备安装工程有限公司工程科) 摘要:UG NX高级仿真模块具有很强的线性分析功能和非线性分析功能,能够满足压力容器应力分析的需求。以压力容器典型的受内压圆筒径向接管结构为例,利用NX CAD的强大建模功能以及CAD&CAE的无缝集成,进行了应力分析以及线性化处理,成功证明了UG NX高级仿真在压力容器分析设计中应用的可行性、方便性。 关键词:UG NX高级仿真;压力容器;CAD&CAE技术;nx nastran ;线性化处理;应力分析 UG NX高级仿真—基本模块是UG NX的核心子集,包括了一系列分析功能例如线性静态分析,正则模态分析,线性屈曲分析以及流体、热传递分析。UG NX高级仿真—基本模块提供了有限元分析所需的单元类型库,模型材料库。支持强有力的边界条件管理能力。提供系列的包括屈曲分析的线性算法控制能力以及无限规模的正则模态分析能力。支持稳态和瞬态热传递分析的解算能力。NX- 基本分析模块在虚拟产品开发流程中拥有很关键的地位,为产品性能开发的数字化原型和仿真模拟提供了广泛应用的CAE解决方案。 特征 ?强有力的分析能力 ?功能完善的单元库包括点焊单元在内 ?各种类型的模型材料库 ?边界条件易操作性如工况的合并,添加,删除 ?各种特征值求解正则模态及复特征值分析 ?设计优化和敏度分析评估设计变动的效果 ?高效的解算器 ?热传导 ?自然对流 ?强迫对流 ?热载荷定义 ?温度边界条件 ?初始边界条件 ?热控制系统 ?图形化显示结果 收益 ?与物理原型试验相比,仿真分析降低了设计周期长和成本高的风险 ?通过相对快捷的仿真过程和反复的验证研究大大提高了产品革新的进程 ?在各种工况下都能进行产品功能仿真模拟,包括热场分析 一、UG NX高级仿真功能简介 UG NX高级仿真技术功能可以实现: 1)静力分析:除一般分析功能之外还提供结构的重量和重心数据,支持全范围的材料模式。同时支持具有惯性释放的静力分析(无约束状态下的准静态响应)、非线性静力分析(包括几何非线性、材料非线性和接触非线性等)。 2)屈曲分析:主要用于结构特定载荷下稳定性以及失稳的临界载荷。包括线性屈曲分析(特征值屈曲分析)和非线性屈曲分析(几何非线性屈曲分析、弹塑性屈曲分
(完整版)子系统与模块封装技术,S-函数编写-SIMULINK高级仿真
实验三:SIMULINK高级仿真技术实验—子系统与模块封装技术,S-函数编写 一、子系统与模块封装技术应用 1、建立如图所示的模型,选择输入输出模块之间的所有模块对象创建子系统,得到创建带有子系统的模型和子系统模型。 lab1_1B.mdl Terminator
2、线性系统由下列微积分方程组成: 1 1 2 2 2 3 1 3 1 2 3 2 2 1 2 3535x x x x x x u x x x x u y x u u =-+? ?=--+?? =---+??=-+-?&&& (1) 采用积分器方法在SIMULINK 上建立模型。 (2)对上述模型进行子系统封装,要求子系统的输入信号两个u1和u2,输出信号有四个x1,x2,x3和y 。 lab1_2B.mdl
二、基于SIMULINK 的微分方程求解: 1、考虑下面给出的微分代数方程: 1 1 2 3 12 2 2 1 2 2 3 2 1 2 3 0.20.325210x x x x x x x x x x x x x x x =-++?? =--??++-=? && 已知初始条件为12 3 (0) 0.8,(0)(0)0.1x x x ===。 在SIMULINK 上搭建微分代数方程的仿真模型,利用MATLAB 的函数模块进行编程,并对系统进行仿真。 -0.4 -0.2 0.2 0.4 0.6 0.8 1
2、延迟微分方程的SIMULINK 求解。考虑下面给出的延迟微分方程式: 3 ()13()(1)0.2(0.5)(0.5)()3()2()4()x t x t y t x t x t y t y t y t x t =-------?? ++=? &&&& 要求:(1)建立延迟微分方程的SIMULINK 模型 (2) 在阶跃输入下的系统状态变量和输出响应曲线,并在图上标注 (),()x t y t 。 01234 5678910 0.050.10.150.20.25 0.30.350.4t x &y
Abaqus6.14有限元仿真分析视频教程-实例篇(上)
Abaqus6.14有限元仿真分析视频教程-实例篇(上)
江西省南昌市2015-2016学年度第一学期期末试卷(江西师大附中使用)高三理科数学分析 一、整体解读 试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。 1.回归教材,注重基础 试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。 2.适当设置题目难度与区分度
选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。 3.布局合理,考查全面,着重数学方法和数学思想的考察 在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。 二、亮点试题分析 1.【试卷原题】11.已知,,A B C 是单位圆上互不相同的三点,且满足AB AC → → =,则AB AC → → ?的最小值为 ( )
汽车零部件强度分析
雪佛莱C1500皮卡整车分析实例 ?重力荷载下悬挂臂的应力和变形 ?刹车分析——惯性平衡 ?行驶在不平整路面——子结构 雪佛来C1500皮卡Copyright 2009 ABAQUS, Inc. 雪佛莱C1500皮卡整车分析实例 ?重力荷载下悬挂臂的应力和变形 重力荷载下悬挂臂的应力 重力荷载下底盘的应力分布Copyright 2009 ABAQUS, Inc.
雪佛莱C1500皮卡整车分析实例 maximum stress = 193.9 N/mm 2maximum stress = 191.4 N/mm 2 静态分析——惯性平衡瞬态动力学分析刹车制动时的两种方法对比分析:?刹车制动时的应力分析(两种方法)Copyright 2009 ABAQUS, Inc. 雪佛莱C1500皮卡整车分析实例 ?路况1结果 ?卡车以速度7 m/sec (25.2 km/h) 跳过一个颠簸. 车轮与路面有脱离接触的过程?卡车在不平整的路面上行驶(两种工况): Copyright 2009 ABAQUS, Inc.
雪佛莱C1500皮卡整车分析实例 ?卡车在不平整的路面上行驶(两种工况): ?路况2结果 路况2下四个轮胎上的径向力路况2下纵摆(Pitch) 侧倾(Roll) 偏转(yaw) Copyright 2009 ABAQUS, Inc. 雪佛莱C1500皮卡整车分析实例 ?卡车在不平整的路面上行驶(两种工况): ?路况2结果( 子模型) A型臂上的应力分布 Copyright 2009 ABAQUS, Inc.
减震支架分析(GM) ?实验过程中出现异常噪声 结构示意图 实际装配结构(与设计偏移)SCC2010 减震支架分析(GM) ?1500N 径向载荷 SCC2010
有限元仿真技术的发展及其应用
有限元仿真技术的发展及其应用 许荣昌 孙会朝 (技术研发中心) 摘 要:介绍了目前常用的大型有限元分析软件的现状与发展,对其各自的优势进行了分析,简述了有限元软件在冶金生产过程中的主要应用领域及其发展趋势,对仿真技术在莱钢的应用进行了展望。 关键词:有限元仿真 冶金生产 发展趋势 0 前言 自主创新,方法先行,创新方法是自主创新的根本之源,同时,随着市场竞争的日益激烈,冶金企业的产品设计、工艺优化也由经验试错型向精益研发方向发展,而有限元仿真技术正是这种重要的创新方法。近年来随着计算机运行速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的应用,比如,有限元分析在冶金、航空航天、汽车、土木建筑、电子电器、国防军工、船舶、铁道、石化、能源、科学研究等各个领域正在发挥着重要的作用,主要表现在以下几个方面:增加产品和工程的可靠性;在产品的设计阶段发现潜在的问题;经过分析计算,采用优化设计方案,降低原材料成本;缩短产品研发时间;模拟试验方案,减少试验次数,从而减少试验成本。与传统设计相比,利用仿真技术,可以变经验设计为科学设计、变实测手段为仿真手段、变规范标准为分析标准、变传统分析技术为现代的计算机仿真分析技术,从而提高产品质量、缩短新产品开发周期、降低产品整体成本、增强产品系统可靠性,也就是增强创新能力、应变能力和竞争力(如图1、2) 。 图1 传统创新产品(工艺优化)设计过程为大循环 作者简介:许荣昌(1971-),男,1994年毕业于武汉钢铁学院钢铁冶金专业,博士,高级工程师。主要从事钢铁工艺技术研究工 作。 图2 现代CAE 创新产品(工艺优化)设计过程为小循环 1 主要有限元分析软件简介 目前,根据市场需求相继出现了各种类型的应用软件,其中NAST RAN 、AD I N A 、ANSYS 、ABAQUS 、MARC 、MAGS OFT 、COS MOS 等功能强大的CAE 软件应用广泛,为实际工程中解决复杂的理论计算提供了非常有力的工具。但是,各种软件均有各自的优势,其应用领域也不尽相同。本文将就有限元的应用范围及当今国际国内CAE 软件的发展趋势做具体的阐述,并对与冶金企业生产过程密切相关的主要有限元软件ANSYS 、ABAQUS 、MARC 的应用领域进行分析。 MSC 1Soft w are 公司创建于1963年,总部设在美国洛杉矶,MSC 1Marc 是MSC 1Soft w are 公司于1999年收购的MARC 公司的产品。MARC 公司始创于1967年,是全球首家非线性有限元软件公司。经过三十余年的发展,MARC 软件得到学术界和工业界的大力推崇和广泛应用,建立了它在全球非线性有限元软件行业的领导者地位。随着Marc 软件功能的不断扩展,软件的应用领域也从开发初期的核电行业迅速扩展到航空、航天、汽车、造船、铁道、石油化工、能源、电子元件、机械制造、材料工程、土木建筑、医疗器材、冶金工艺和家用电器等,成为许多知名公司和研究机构研发新产品和新技术的重要工具。在航空业MSC 1Nastran 软件被美国联邦航空管理局(F AA )认证为领取飞行器适 3 1
基于UG的运动仿真及高级仿真
《基于UG的运动仿真及高级仿真》
项目一:机构运动仿真 项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。 任务一:熟悉掌握运动仿真基础知识 运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。 UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。 一、运动方案创建步骤 1.创建连杆(Links); 2.创建两个连杆间的运动副(Joints) 3.定义运动驱动(Motion Driver) ◆无运动驱动(none):构件只受重力作用 ◆运动函数:用数学函数定义运动方式 ◆恒定驱动:恒定的速度和加速度 ◆简谐运动驱动:振幅、频率和相位角 ◆关节运动驱动:步长和步数 二、创建连杆 创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)
质量属性选项: 质量特性可以用来计算结构中的反作用力。当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。但在某些特殊情况下,用户必须人工输入这些质量特性。 固定连杆: 人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。注:必须选择好质心并且输入质量的数值,才能定义质量属性。 三、创建运动副 运动副就是将机构中的连杆连接在一起,从而使连杆一起运动。在运动副创建前,机构中的连杆是在空间浮动的,没有任何约束,具有6个自由度。运动副创建后,会约束一个或几个自由度,运动副具有双重作用:允许所需的运动和限制不要的运动。 运动副的创建步骤: 1)创建运动副要约束的第一个连杆 2)创建运动副第一个连杆的原点和方向 3)创建运动副要约束的第二个连杆 4)创建运动副第二个连杆的原点和方向
第九章 Simulink高级仿真技术
105 第九章 Simulink 高级仿真技术 第八章对动态系统的建模、仿真与分析方法做了详细的介绍,这些方法足够用户对简单的动态系统进行仿真研究,但对于复杂的系统来说还略显不足。况且要想灵活高效的使用Simulink ,还必须了解Simulink 的工作原理。本章主要介绍Simulink 的高级仿真技术,包括Scope 模块的高级使用技术、Simulink 的工作原理、过零事件、系统代数环的概念与解决方案、高级积分器的使用方法等。 9.1 Scope 模块的高级使用技术 从前面章节所举出的仿真示例中可以看出,在对系统进行仿真分析时,通常使用Scope 示波器模块来观察动态系统的仿真结果或系统中指定的信号。用户可以很方便地对Scope 模块进行各种控制以便对指定信号进行观测,以便对系统进行有效的分析。Scope 模块也可以设置成悬浮Scope 模块,因而本节主要对Scope 模块和悬浮Scope 模块做详细的介绍。 9.1.1 Scope 模块的使用 Scope 模块是一个用途很广的显示模块,我们前面章节给出的Simulink 仿真系统中多半都使用了这种模块,它是以图形的方式直接显示指定的信号。当无需对输出结果进行定量分析,可以从Scope 模块输出的曲线中直接获知系统的运动规律。Scope 模块给用户提供了很多控制方法,可以使用户对Scope 模块的输出曲线进行各种控制调整,以便用户观测和分析输出结果。 Scope 模块的工具栏按钮命令如图9.1所示。下面分别介绍各项功能。 一、打印输出(Print ) 将系统仿真结果的输出信号打印出来。 二、视图自动缩放(Autoscale ) 点击此按钮可以自动调整显示范围以匹配系统仿真输出信号的动态范围。 三、X 轴缩放、Y 轴缩放以及视图整体缩放 可以分别对X 坐标轴、Y 坐标轴或同时对X 、Y 坐标轴的信号显示进行缩放,以满足用户对信号做局部观察的需要。使用时,单击缩放按钮后选择需要观察的信号范围即可。若需要缩小视图,单击鼠标右键,选择弹出菜单的Zoom out 即可。 四、保存和恢复坐标轴设置 图9.1 Scope 模块的工具栏按钮命令
结构检测鉴定报告
金房玲珑湾商业综合楼改扩建工程结构检测鉴定方案 编写: 审核: 湖南省宏尚土木工程检测有限公司
2012年07月21日
金房玲珑湾商业综合楼改扩建工程 结构检测鉴定方案 一、工程概况 本工程为长沙金房房地产开发有限公司开发建设的金房玲珑湾商业综合楼。设计单位为湖南大学设计研究院有限公司,监理单位为湖南骥征工程建设监理有限公司。 本工程原设计为四层框架柱无梁楼盖结构,两电梯井为剪力墙。原楼层为、、、四层,现用无损切割将,两层楼盖切除,增加、、、、楼层,将四层改造为七层。为了解该楼建筑工程改扩建后工程安全性状况,长沙金房房地产开发有限公司委托湖南省宏尚土木工程检测有限公司对该楼工程进行结构检测鉴定。 二、检测内容和主要仪器设备 主要检测内容及方法 现场检测工作内容: 工程概况的调查与现场踏勘,内容包括:结构形式、基础形式、墙体材料与砌筑方法、楼屋盖形式,工程地质勘察单位、设计单位、施工单位、监理单位等。 现场调查内容包括:鉴定建筑物的工程名称、委托鉴定单位名称、坐落地址、开竣工及投入使用日期、房屋用途、使用现状、结构受荷、周围环境等。明确房屋鉴定的原因。 材料强度及性能
材料强度的检测、评定是结构可靠性评定的重要指标,如钢筋混凝土结构的混凝土强度、砂浆强度等。现场检测主要采用回弹法、钻芯法等检测方法进行材料强度检测。 几何尺寸检测、评定 现浇混凝土结构及预制构件的尺寸,应以设计图纸规定的尺寸为基准确定尺寸的偏差,尺寸的检测方法和尺寸偏差的允许值应按《混凝土结构工程施工质量验收规范》GB50204确定。 对于受到环境侵蚀和灾害影响的构件,其截面尺寸应在损伤最严重部位量测,在检测报告中应提供量测的位置和必要的说明。 几何尺寸是结构和构件可靠性验算的一项指标,截面尺寸也是计算构件自重的指标,几何尺寸一般可查设计图纸,如果是老建筑物图纸不全,或图纸丢失,需要现场实测其建筑物的平面尺寸,有竣工图纸时,也可将几何尺寸的检测结果对照图纸进行复核,评定其施工质量,为可靠性鉴定提供依据。 外观质量和缺陷检测 混凝土构件外观质量与缺陷的检测可分为蜂窝、麻面、孔洞、夹渣、露筋、裂缝、疏松区和不同时间浇筑的混凝土结合面质量等项目。 混凝土构件外观缺陷,可采用目测与尺量的方法检测;检测数量,对于建筑结构工程质量检测时宜为全部构件。混凝土构件外观缺陷的评定方法,可按《混凝土结构工程施工质量验收规范》GB50204-2002确定。 结构构件的挠度或倾斜度检测 可用目测或/和用吊锤进行检测;若有明显挠度或倾斜度,应采用激光或经纬仪或其他仪器进行定量检测。 混凝土构件钢筋保护层检测 采用SW-180T钢筋位置测定仪对外露混凝土构件钢筋保护层和间距进行检测,采取局部凿开混凝土核查钢筋规格及间距。 结构构件裂缝检测
空气悬架强度分析报告
(1) 有限元网格划分 考虑到结构的复杂性以及期望得到分析结果的可靠性,对空气悬架整体采用六面体网格划分,局部采用四面体划分。运用hypermesh 前处理软件中的Solid Map 命令对每个零件单独划分,即现在某个零件的一面划分2D 有限元网格,并将这个被拉伸的2D 有限元网格映射到一个由几何元素定义的实体中,从而形成一个三维体积来创建实体网格。 → → 由于空气悬架上半梁两端的面积相差较大(如图),画出的有限元网格不是很理想,对在此部位出现问题的有限元网格尽可能得用手工方式去修改,但是工作量比较大。 最终画出的有限元网格如下图所示 (2) 模拟焊接单元 创建部件的实体几何 将实体几何分割成易 映射的区域 使用Solid Map 创建四面体或六面体网格
结合实际情况考虑,各个件之间是焊接的关系,所以在hypermesh中我们采取CWELD单元模拟焊接。首先是在要焊接的两个零件的焊接表面生成一个二维的薄膜单元,然后在spotweld面板下的using elems子面板下生成CWELD焊接单元,这样在每处需要焊接的地方生成焊接单元来模拟。焊接单元如下: (局部焊接单元的模拟) (整体的焊接单元) 这样就做好了焊接单元的模拟工作。 (3)添加约束以及载荷、载荷步 根据实际情况可知,空气悬架是两段加载荷,靠中间梁上的螺栓来约束其自由度,根据以往模拟螺栓的经验,把中间梁上下的盖板上的螺栓口的节点用rbe2来连接起来模拟螺栓,约束上下盖板八个口处以及螺栓口外一圈的节点的全部自由度。如下图所示:
在空气悬架的两端加载荷,由运动学仿真结果可知,空气悬架静载时主要在气囊支座以及弹簧支座上受力(压强),加在气囊支座上的力为30000N,计算得压强为1.72N/mm2,加在弹簧支座上的力为3000N,计算得压强为3.96N/mm2。如下图 最后,建立一个载荷步: 这样,前处理的全部工作完成,下面就可以提交给Optistruct进行运算。 (4)后处理
十大物流仿真软件汇总
1 十大物流仿真软件汇总 目录 (一) Flexsim (2) (二) RaLC(乐龙) (2) (三) Witness(SDX) ..................................... 2 (四) Automod (3) (五) ShowFlow (3) (六) SIMAnimation ..................................... 4 (七) Arena (4) (八) Supply chain guru (5) (九) Classwarehouse ................................... 5 (十) SimLab (5)
6 / 1 2 (一)Flexsim Flexsim是美国的三维物流仿真软件,能应用于系统建模、仿真以及实现业务流程可视化.Flexsim中的对象参数可以表示基本上所有的存在的实物对象,如机 器装备、操作人员、传送带、叉车、仓库、集装箱等,同时数据信息可以用Flexsim 丰富的模型库表示出来.Flexsim具有层次结构,可以使用继承来节省开发时间.而且它还是面向对象的开放式软件.对象、视窗、图形用户界面、菜单列表、对象参数等都是非常直观的.由于Flexsim的对象是开放的,所以这些对象可以在不同的用户、库和模型之间进行交换,再结合对象的高度可自定义性,可以大大提高建模的速度.Flexsim的用户性和可移植性扩展了对象和模型的生命周期. (二)RaLC(乐龙) RaLC(乐龙)软件,是上海乐龙人工智能软件有限公司(日本人工智能服务有限公司在华子公司)提供的.它是面向对象的,物流配送中心所使用的基本搬运器械设备即对象事物,包括各种传送带、自动立体仓库、平板车等,以及工作人员的装卸、分拣、叉车搬运等,全部以按钮的形式摆放在工具栏上,而且可以对对象物体的配置来进行设计,用于对各类对象物体的形状和规格建模也十分直观.RaLC乐龙系列软件在建模速度、建模操作简便性、模拟和仿真精确度等方面都处于世界领先水平. (三)Witness(SDX) Witness(SDX)由英国Lanner集团用数十年系统仿真经验开发出的,它是面6 / 2 3 向工业系统,商业系统流程的动态系统建模仿真软件平台,是离散型的仿真软件,流程的仿真动态演示是三维的,是世界上该领域的主流仿真软件之一.它提供了大量描述工业系统的模型元素,如生产线上的加工中心、传送设备、缓冲存储装置等.
结构强度的分析
第三节结构与稳定性 一、新课内容: 结构的稳定性是指结构在负载的作用下,维持原有平衡状态的能力。 台风过后,部分结构却完好无损,这又说明,有的结构稳定,有的结构不稳定。 想一想: 结构的稳定性与什么因素有关? 填表说明下表中的物体有可能因受哪些力的作用而出现不稳定现象,并根据你的生活经验,简要说明原因。(P012) (一)影响结构稳定性的主要因素: [实验探究1]: 学生拿一本书,让它直立在桌面上,它马上倾倒了,显然,其稳定性不好。 同样的一本书,把它的下端各书页展开一定的角度,仍旧将它直立在桌面上,它就能很好的挺立住。 因素一:支撑面积的大小 1. 稳定性与支撑面积的大小有关
支撑面越大越稳定,越小越不稳定。 A.落地电风扇或者宾馆里的落地灯,它们都有一个比较大的底座。 [引导学生得出结论]:结构的底座,结构与地面接触所形成的 B:为什么大坝的横截面总是建成梯形? 生:思考回答 师:大坝需要承受很大的力的作用,如自身的重力,水的冲击力、压力等等,要起到防洪的作用,大坝必须要求非常稳固。大坝建成梯形,增大了与地面接触所形成的支撑面,支撑面越大越坚实,稳定性就越好。 C.为什么许多课桌椅的支撑脚要做成往外倾斜? 生:思考回答 师:这是为了进一步增大与地面接触所形成的支撑面积,增加稳定性。从而引导学生得出结论:结构的稳定性与支撑面积大小有关。 注意:支撑面≠接触面。(接触面是物体与地面接触形成的面。支撑面是物体与地面接触形成支撑点的连线与地面构成的面。)
[实验探究2]:显示落地扇的图片 师:落地扇为什么不易倾倒? 生:思考回答 师:落地扇的底座采用较重的材料,风扇比底座轻很多,使落地扇的重心降低。 因素二:重心位置 2.结构的稳定性与重心位置有关。 物体重心越低,越稳定。 A.不倒翁为什么不倒?如果在它脖子上挂上一定数量的铁环,它还会不倒吗? 师:研究不倒翁的结构,发现不倒翁的重心很低,就在它与地面的接触点上,所以不倒,如果往它的脖子挂上铁环,它的重心位置升高了,当铁环达到一定数量时,不倒翁就不在是不倒翁了。 [引导学生得出结论]:重心的高低影响结构的稳定性。重心越低,稳定性越好;重心越高,稳定性越差。 B.以前的农作物个子高,遭遇暴风骤雨容易倾覆,造成减产;现在的农作物普遍个子矮。就是利用了重心低结构稳定的原理。 C.屏幕显示比萨斜塔的图片,比萨斜塔为什么不倒塌?(简单介绍比萨斜塔。) 通过分析长方体重心的垂线位置与稳定性示意图,使学生容易理解,比萨斜塔不倒的原因是它的重心所在点的垂线落在塔的底面的范围内。当塔倾斜到一定程度,重心的垂线不再落在塔的底面时,塔就会倾倒。 [引导学生得出结论]:结构的稳定性与重心位置有关。
高铁车体结构件应力分析与疲劳强度评估 王磊 但龙 姜晓艳
高铁车体结构件应力分析与疲劳强度评估王磊但龙姜晓艳 发表时间:2019-07-15T16:09:32.903Z 来源:《当代电力文化》2019年第05期作者:王磊但龙姜晓艳 [导读] 2007年4月18日,我国的高铁开始正式投入使用,由于是刚刚开始进行高铁的建设,因此在高铁运营过程中往往会出现各种各样的问题和缺陷。 中车青岛四方机车车辆股份有限公司山东青岛 266000 摘要:2007年4月18日,我国的高铁开始正式投入使用,由于是刚刚开始进行高铁的建设,因此在高铁运营过程中往往会出现各种各样的问题和缺陷。其中有80%的机械零件都是因为疲劳破坏而失效的。高铁车体结构大部分都是采用金属材料制作的,而金属不可能做无数次的交变载荷试验,都存在一个疲劳强度,一旦所加的应力值超过金属材料的疲劳强度,就会导致金属变形,从而出现严重事故。基于此,本文首先简单的介绍一下影响疲劳强度的因素;随后详细的介绍一下计算疲劳强度的疲劳试验方法。以此仅供相关人士进行交流与参考。 关键词:高铁车体结构件;应力分析;疲劳强度评估 引言: 在这短短的十几年间,我国的高铁行业得到了突飞猛进的发展,装备生产、运行管理等质量水平也在不断的进步和提高。而机械零件作为高铁车体结构的一个重要组成部分,确实应该引起高铁部门的重视。本文首先介绍一下影响机械零件疲劳强度的因素,随后介绍一下计算机械零件疲劳强度的疲劳试验方法,从而准确的进行疲劳强度的评估,从而不断提高高铁结构件的质量。 一、影响高铁车体结构的疲劳强度因素 高铁车体结构件的疲劳强度评估研究一直都在进行,其中最初的评估方法就是对零件疲劳极限进行测定。但由于实际零件在制作过程中尺寸、形状、材料等都各有不同,因此通过测定零件疲劳极限来评估疲劳强度的试验方法在实施起来具有很大的困难。以此,我们可以通过研究影响机械零件疲劳强度的因素来评估机械零件的疲劳强度。影响机械零件疲劳强度的因素主要是应力集中与梯度;尺寸效应以及表面加工质量这三点(见图一)。 (一)应力集中与梯度 为了满足高铁车体结构的要求,机械零件的制作和加工一般都有拐角、切口、沟槽等缺口,这些缺口自然而言的就出现了应力集中,从而提高了零件的局部应力。在零件部件承载静载荷时,随着静载荷的增加,零件会出现一个宏观塑性变形的阶段,重新分配应力并趋于均匀。而对于疲劳破坏而言,零件并不会出现明显的宏观塑性变形,也不会重新分配应力,因此缺口处的疲劳强度比光滑部位高,出现问题的概率也比较大。缺口处的最大局部应力ɑmax和名义应力ɑn的比值为理论应力集中系数K,K=ɑmax/ɑn。K可以用来表示应力集中提高零件局部应力作用,也被称为形状系数,一般采用弹性力学解析方法或者是光测弹性力学试验来求解[1]。 (二)尺寸效应 机械零件的尺寸对于疲劳强度的影响较大,尺寸效应指的就是当尺寸增大时,疲劳强度就会降低。一般用尺寸系数ε来表示尺寸效应作用的大小。δ-1d为零件的疲劳极限,δ-1为几何相似式样的疲劳强度,d为试样和零件的尺寸(一般在6mm到7.5mm),所以ε=δ-1d/δ-1。引起尺寸效应的因素可以分为制作工艺因素和比例因素。制作工艺因素主要是指机械零件在加工制造过程中因为制作差异出现的尺寸变化[2]。而且铸造件的规模大小也会不同程度的增加铸造困难,一般体积越大的铸造件铸造难度更高,也比较容易出现气孔、沙眼等缺陷,这些缺陷都会成为零件的薄弱部分,从而降低零件的疲劳强度。 (三)表面加工质量 表面加工质量一般由表面粗糙度来衡量,金属种类的不同、加工方法的不同都会对表面加工质量造成影响,像金属表面切削深度、切削用量等,都会对零件部件的疲劳强度产生影响。根据相关研究证明,金属式样的疲劳强度随硬化程度的增加而增加,而且应变硬化的式样都会产生残余的压应力,这种压应力会大大提高零件的拉伸疲劳强度,进而降低零件的疲劳强度[3]。 (图一)影响高铁车体结构的疲劳强度因素 二、计算疲劳强度的疲劳试验方法 (一)常规疲劳试验方法介绍 在进行疲劳实验之前,首先要制备好疲劳式样,疲劳式样需要经过机械加工、热处理以及尺寸测量、表面检验等步骤,保证疲劳式样能够达到疲劳试验的设备要求标准。常规的疲劳试验方法主要用于式样个数不多、生产任务紧急的情况,该方法可以直接给出零件式样的
十大物流仿真软件汇总
十大物流仿真软件汇总 目录 (一) Flexsim (2) (二) RaLC乐龙) (2) (三) Witness(SDX) . (2) (四) Automod (3) (五) ShowFlow (3) (六) SIMAnimation . (4) (七) Arena (4) (八) Supply chain guru . (5) (九) Classwarehouse . (5) (十) SimLab (5)
(一) Flexsim Flexsim 是美国的三维物流仿真软件, 能应用于系统建模、仿真以及实现业务流程可视化.Flexsim 中的对象参数可以表示基本上所有的存在的实物对象, 如机器装备、操作人员、传送带、叉车、仓库、集装箱等, 同时数据信息可以用Flexsim 丰富的模型库表示出来.Flexsim 具有层次结构, 可以使用继承来节省开发时间. 而且它还是面向对象的开放式软件.对象、视窗、图形用户界面、菜单列表、对象参数等都是非常直观的. 由于Flexsim 的对象是开放的, 所以这些对象可以在不同的用户、库和模型之间进行交换, 再结合对象的高度可自定义性, 可以大大提高建模的速度.Flexsim 的用户性和可移植性扩展了对象和模型的生命周期. (二)RaLC乐龙) RaLC乐龙)软件,是上海乐龙人工智能软件有限公司(日本人工智能服务有限公司在华子公司)提供的. 它是面向对象的, 物流配送中心所使用的基本搬运器械设备即对象事物, 包括各种传送带、自动立体仓库、平板车等, 以及工作人员的装卸、分拣、叉车搬运等, 全部以按钮的形式摆放在工具栏上, 而且可以对对象物体的配置来进行设计, 用于对各类对象物体的形状和规格建模也十分直 观.RaLC 乐龙系列软件在建模速度、建模操作简便性、模拟和仿真精确度等方面都处于世界领先水平. (三) Witness(SDX) Witness(SDX)由英国Lanner 集团用数十年系统仿真经验开发出的, 它是
Abaqus.有限元仿真分析视频教程实例篇(上)
江西省南昌市2015-2016学年度第一学期期末试卷 (江西师大附中使用)高三理科数学分析 一、整体解读 试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生 的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。 1.回归教材,注重基础 试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。 2.适当设置题目难度与区分度 选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。 3.布局合理,考查全面,着重数学方法和数学思想的考察 在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。 二、亮点试题分析 1.【试卷原题】11.已知,,A B C 是单位圆上互不相同的三点,且满足AB AC → → =,则AB AC → → ?的最小值为( ) A .1 4- B .1 2- C .3 4- D .1-