一种三重化冗余危急跳闸系统设计与实现
一种三重化冗余危急跳闸系统设计与实现
邹见效1,徐红兵1,张正迁1,曾 斌2
(1.电子科技大学自动化工程学院,四川省成都市610054;2.四川东方电气自动控制工程有限公司,四川省德阳市618000)
摘要:为提高汽轮机组危急跳闸系统(ETS )的可靠性,给出了一种三重化冗余(TMR )结构的ETS
控制系统设计。系统的信号输入、总线传输、决策、输出环节均采用独立无耦合的TMR 结构设计,同时,各环节模块具有自测试诊断功能和支持在线更换模块功能。采用主机参数同步策略保证系统响应的实时性和准确性,采用可预设的表决策略和模块自检故障表参与决策以提高系统可靠性。通过可靠性分析以及现场调试运行,验证了系统的可靠性及稳定性。关键词:三重化冗余;危急跳闸系统;可靠性;汽轮机;自测试中图分类号:TM76;TP277
收稿日期:2008210210;修回日期:2008212230。
0 引言
汽轮机危急跳闸系统(ETS )是用于监控对机组安全有重大影响的参数,以便在这些参数超过安全限值时,发出紧急停车信号,避免危险扩散造成重大损失,对于生产装置的安全、稳定、高效运行具有重
要意义[123]
。其工作过程是将汽轮机跳闸的信号进行汇总,然后输出跳闸信号至跳闸电磁阀,跳闸电磁阀卸掉保安系统的保安油,使汽轮机的主汽阀和调节阀迅速关闭,完成汽轮机跳闸功能。传统的ETS 采用继电器用硬接线连接而成,其特点是可靠性较低、信号不易改动等。针对以上问题,目前主要是通过分布式控制系统(DCS )、可编程逻辑控制器
(PL C )这2类系统实现ETS [425]
。由于ETS 是汽轮机组控制系统中负责汽轮机危急跳闸的控制系统,安全、可靠地执行跳闸指令是ETS 的重要指标。
三重化冗余(TMR )容错控制技术是近年来发展起来的一种容错设计技术,在航空航天、军事、铁路、石油、化工、电力等要求高可靠性的行业得到了广泛应用[629]。为提高ETS 控制系统的安全性、可靠性和可用性,保证系统安全、可靠、不间断工作,本文设计了一种TMR 结构的ETS 控制系统。
1 系统结构和原理
系统设计目标是:通过各环节采用TMR 的措
施提高系统可靠性和安全性;系统能够识别各组成模块故障并自动对其进行诊断;允许在不中断系统运行的情况下对其实施维修和更换部件。
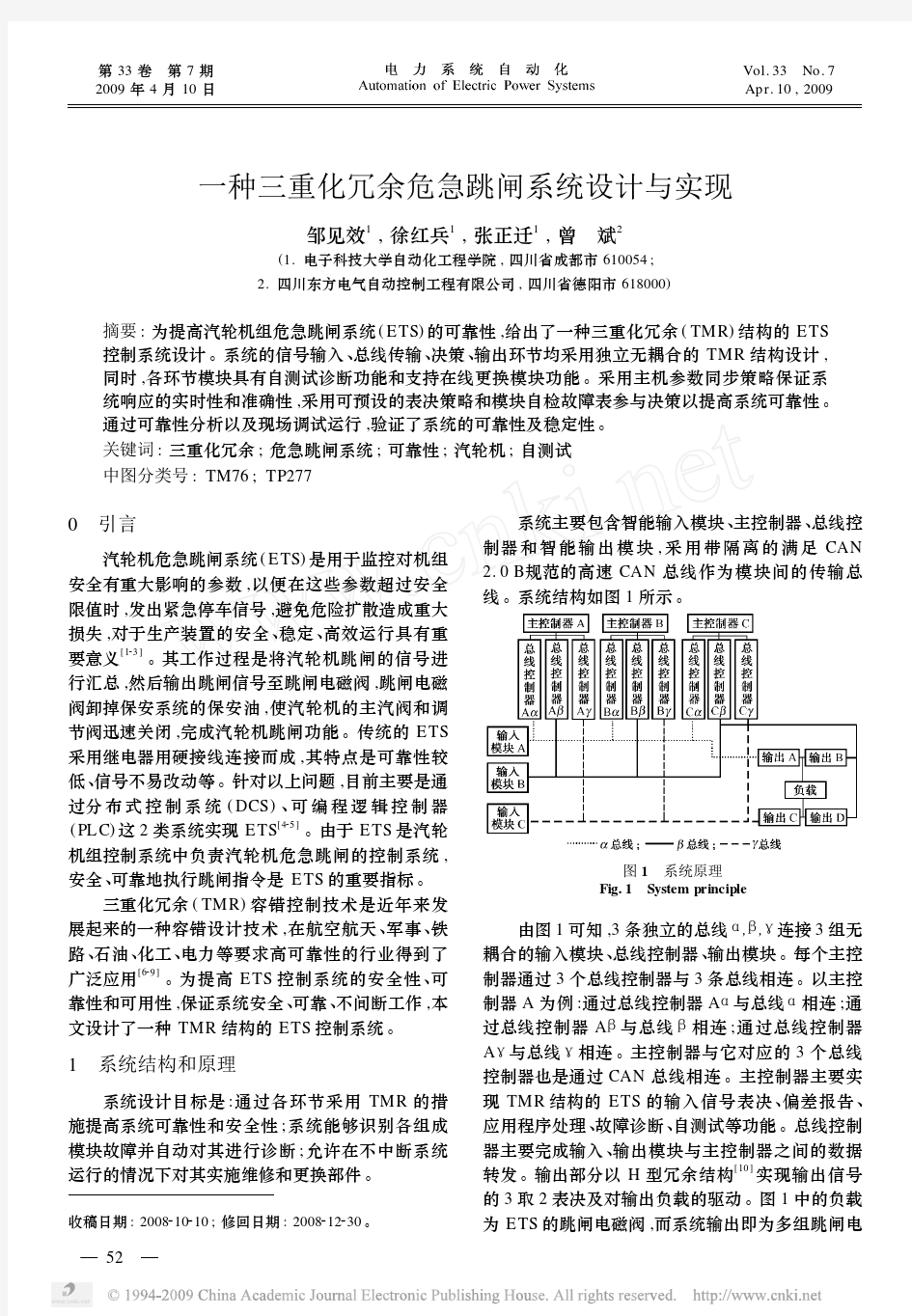
系统主要包含智能输入模块、主控制器、总线控制器和智能输出模块,采用带隔离的满足CAN 2.0B 规范的高速CAN 总线作为模块间的传输总线。系统结构如图1所示
。
图1 系统原理Fig.1 System principle
由图1可知,3条独立的总线α,β,γ连接3组无耦合的输入模块、总线控制器、输出模块。每个主控制器通过3个总线控制器与3条总线相连。以主控制器A 为例:通过总线控制器A α与总线α相连;通过总线控制器A β与总线β相连;通过总线控制器A γ与总线γ相连。主控制器与它对应的3个总线控制器也是通过CAN 总线相连。主控制器主要实现TMR 结构的ETS 的输入信号表决、偏差报告、应用程序处理、故障诊断、自测试等功能。总线控制器主要完成输入、输出模块与主控制器之间的数据转发。输出部分以H 型冗余结构[10]实现输出信号的3取2表决及对输出负载的驱动。图1中的负载为ETS 的跳闸电磁阀,而系统输出即为多组跳闸电
第33卷 第7期2009年4月10
日Vol.33 No.7Apr.10,2009
磁阀的开关量控制信号。
1.1 TMR 系统数据处理过程
1)输入模块定时采集多通道输入信号,并在拥有总线控制权时将数据发送到总线上。同一条总线上的3个总线控制器接收数据包后,将输入信号数据包转发到各自对应的主控制器。
2)各个主控制器对3条总线上传来的同一输入通道的数据进行3取2表决,并将表决后的数据作为最终的输入信号参与应用程序运算。主控制器将运算结果发送至3个总线控制器中。
3)总线控制器在得到控制权时,将输出结果发送至输出模块。每个输出模块将接收到的3个主控制器的输出数据进行输出3取2表决,
得到最终输出结果。
4)4个输出模块组成H 型结构,在硬件上实现输出模块间的3取2表决,最终驱动负载。1.2 智能输入模块
输入模块实现系统开关量输入的同步采集、排序、编码、传输以及自测试功能。根据输入点数的不同,系统可包含多组输入模块,每组包含的3个输入模块分别连接3条独立的总线。智能输入模块采用定时的方式采集输入信号,采集模块将采集数据按顺序存放到数据缓存中,并将该采集数据通过地址广播方式发送至同一总线上的3个总线控制器。1.3 智能输出模块
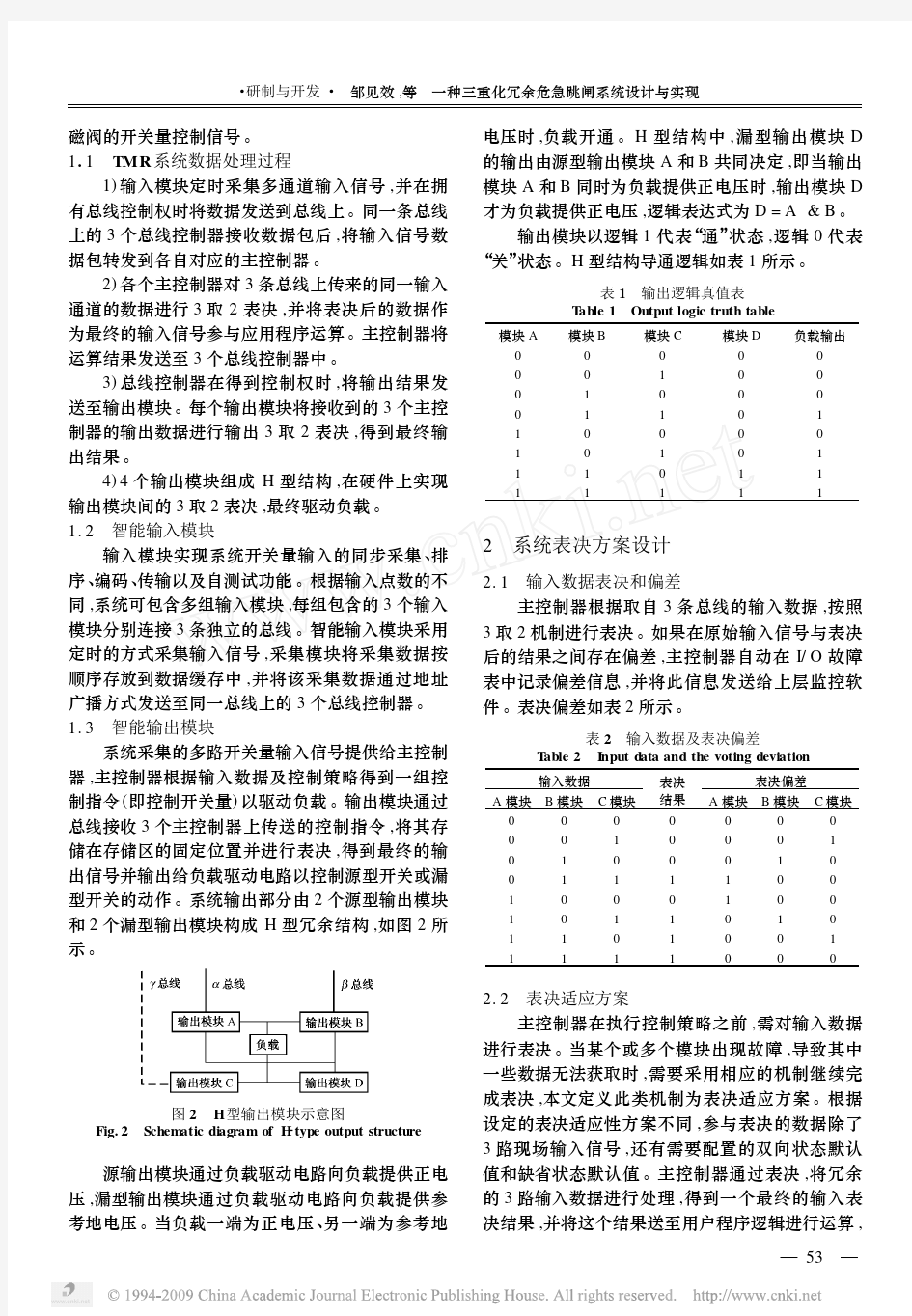
系统采集的多路开关量输入信号提供给主控制器,主控制器根据输入数据及控制策略得到一组控制指令(即控制开关量)以驱动负载。输出模块通过总线接收3个主控制器上传送的控制指令,将其存储在存储区的固定位置并进行表决,得到最终的输出信号并输出给负载驱动电路以控制源型开关或漏型开关的动作。系统输出部分由2个源型输出模块和2个漏型输出模块构成H 型冗余结构,如图2所示。
图2 H 型输出模块示意图
Fig.2 Schem atic diagram of H 2type output structure
源输出模块通过负载驱动电路向负载提供正电压,漏型输出模块通过负载驱动电路向负载提供参考地电压。当负载一端为正电压、另一端为参考地
电压时,负载开通。H 型结构中,漏型输出模块D 的输出由源型输出模块A 和B 共同决定,即当输出模块A 和B 同时为负载提供正电压时,输出模块D 才为负载提供正电压,逻辑表达式为D =A &B 。
输出模块以逻辑1代表“通”状态,逻辑0代表“关”状态。H 型结构导通逻辑如表1所示。
表1 输出逻辑真值表
T able 1 Output logic truth table
模块A
模块B
模块C
模块D
负载输出
000000010001000011011000010101110111
1
1
1
1
2 系统表决方案设计
2.1 输入数据表决和偏差
主控制器根据取自3条总线的输入数据,按照3取2机制进行表决。如果在原始输入信号与表决
后的结果之间存在偏差,主控制器自动在I/O 故障表中记录偏差信息,并将此信息发送给上层监控软件。表决偏差如表2所示。
表2 输入数据及表决偏差
T able 2 I nput d ata and the voting deviation
输入数据
A 模块
B 模块
C 模块
表决结果
表决偏差
A 模块
B 模块
C 模块
00000000010001010001001111001000100101101011010011
1
1
1
2.2 表决适应方案
主控制器在执行控制策略之前,需对输入数据
进行表决。当某个或多个模块出现故障,导致其中一些数据无法获取时,需要采用相应的机制继续完成表决,本文定义此类机制为表决适应方案。根据设定的表决适应性方案不同,参与表决的数据除了3路现场输入信号,还有需要配置的双向状态默认值和缺省状态默认值。主控制器通过表决,将冗余的3路输入数据进行处理,得到一个最终的输入表决结果,并将这个结果送至用户程序逻辑进行运算,
?研制与开发? 邹见效,等 一种三重化冗余危急跳闸系统设计与实现
这样就完成了输入数据的表决。TMR 结构的ETS 中存在3个主控制器,每个主控制器同时独立地进行以上的操作。
系统设计了2种表决适应方案:32220和3222120。
“3”表示3路数据都有效,可以用于表决,采用的表决机制为完整的3取2表决方案。双向状态默认值和缺省状态默认值均不参与表决。表决情况如图3所示
。
图3 3路输入都正常时的表决情况Fig.3 V ote on three norm al inputs
“2”表示仅有2路数据有效,在这种情况下,无法完成3取2表决,所以必须产生一路数据来替代失效的那一路,这种在2路数据有效的情况下产生的数据称为双向默认值。双向默认值是在配置时设定的,根据操作人员的需要设定为“0”,“1”或者“保持”。其中“保持”表示失效路数据保持不变。如图4所示
。
图4 1路输入无效时的表决情况Fig.4 V ote on one fault input
“1”表示仅有1路有效,并且将这一路作为最终的表决结果,不再进行比较。
“0”表示3路全部无效,不进行任何的比较,而是采用一个称为单向默认值的数据作为最终的表决结果,单向默认值也是由操作人员根据需要通过上层软件配置生成的。
表决适应方案32220和3222120在3路、2路、0路有效的情况下采用的处理方式都相同。而32220中没有“1”这种配置,考虑仅1路有效的情况是不可靠的,因此不采用“1”的状态,直接用“单向默认值”作为表决结果;3222120方案则是将唯一的有效路作为表决结果。 2.3 主控制器参数同步策略[11213]
在同步过程中,新上电的主控制器初始化后,首先判断有无其他正常主控制器在线。TMR 系统中,一条总线上的3个总线控制器分别连接到3个主控制器并通过总线控制器进行信息交换。总线控制器把对应连接的主控制器的状态广播给另外的总线控制器。新上电主控制器对应连接的总线控制器汇总另外2个主控制器的状态,并发送给新上电主控制器。据此,新上电主控制器可以判断是否有其他正常的主控制器在线。
3 系统自测试功能
自测试是TMR 结构的ETS 实现故障诊断与定位的重要手段,自测试包含智能输入、输出模块和主控制器的自测试。系统自测试由主控制器控制执行。3.1 主控制器自测试
3个主控制器顺序执行自测试控制,如果1个或2个主控制器离线,其他在线主控制器继续进行自测试的控制。
当在自测试过程中发生了开关量I/O 检测故障时,主控制器将记录故障,并设置相应的故障响应。对于不能在一定时间内得到修复的开关量I/O 检测故障,则将被检测为故障的I/O 通道设置为安全状态;对于输出量而言是“关”状态,对于输入量,停车状态是其“默认”状态,由输入模块组设定。3.2 输入自测试
输入自测试是通过测试系统的输入信号确保输入信号能够对实际输入进行检测和反应。输入自测试能够检查出由某个输入信号导致的输入故障,不会影响系统输出的改变。3.3 输出自测试
输出自测试是检查输出模块驱动负载的能力。为了不影响输出模块的正常工作,在不需要自测试时,自测试回路断开。测试过程与其他输出模块或负载无关。输出自测试分为开通自测试和关断自测试:
1)开通自测试主要是检测输出模块的开通(驱动负载)能力,用来保证输出模块的正常开通;
2)关断自测试主要是检测输出模块关断负载的能力,用以确定输出模块能否正常关断。
只有在输出自测试的开通和关断都正常时,该路才有正常工作(开通和关断负载)的能力,否则诊断该路出现故障,向主控制器发送报告。如果主控
2009,33(7
)
制器确认其他输出模块的同一路均不正常,则应使
该路处于不工作状态。
4 系统可靠性分析及现场调试
4.1 系统可靠性分析
系统可靠性是指系统在规定条件下和规定时间内完成规定功能的能力。可靠性只是一个定性的概念,而实际工作中往往需用可靠度定量地具体表现可靠性的高低。可靠度是指系统在初始时刻(t =0)时可靠度为1的条件下,在0~t 时间内正常工作的概率,用R S (t )表示[14]。由n 个模块组成的串联系统的可靠度为:
R Sc (t )=
∏n
i =0
R i
(t )
(1)
由n 个模块组成的并联系统的可靠度为:
R Sb (t )=1-
∏n
i =0
(1-
R i (t ))(2)
TMR 结构的ETS 为串联、并联单元组合而成的混合结构
,其可靠性逻辑关系如图5所示。
图5 系统可靠性逻辑关系
Fig.5 Logic relationship of system reliability
为计算简便及作为方案比较分析目的,假设输入模块与输出模块的可靠度相同,设为R IO (t ),总线控制器与主控制器均使用了相同的CPU 模块,设其可靠度为R CPU (t ),3取2表决器的可靠度为R V (t )。
由图5可知,ETS 的可靠度由输入部分、主控制器部分和输出部分串联而成。其中,输入部分的可靠度R IN (t )可表示为:
R IN (t )=1-(1-R IO (t ))
3
(3)主控制器部分的可靠度R MC (t )可表示为: R MC (t )=[1-(1-R CPU (t ))3]R V (t )R CPU (t )
(4)
输出部分的可靠度R OU T (t )可表示为:
R OU T (t )=[1-(1-R V (t )R IO (t ))3(1-R IO (t ))]R V (t )
(5)ETS 的总可靠度可表示为:
R S (t )=R IN (t )R MC (t )R OU T (t )
(6)
在系统的设计阶段,对于实际系统部件的可靠
性数据无法精确获得,但若出于方案比较的目的,在可靠性评估中可用估计的数据进行理论上的比较分析。具体工程实现时可根据实际运行工程环境、系统部件可靠性数据等重新计算。本文假设CPU 模块(总线控制器和主控制器)的可靠度为0.999,I/O 模块的可靠度为0.99,3取2表决器的可靠度为0.9999,计算出TMR 系统的可靠度为:
R S (t )=0.998799
(7) 如果没有采用TMR 结构,则系统由输入模块、总线控制器、主控制器和输出模块串联组成,其可靠度为:
R (t )=R 2IO (t )R 2
CPU (t )=0.9781407
(8) 由式(7)、式(8)可见,在相同估值条件和相同可信性情况下,TMR 系统比单模系统大大提高了可靠度,是一个健壮的值得信赖的系统结构,验证了设计方案的正确性和可行性。4.2 系统现场调试
TMR 结构的ETS 调试环境如下:输入、输出智能模块每个模件采用16个I/O 点设计,通过组合4个模块构成输入、输出均为64点的系统,模件间采用背板方式相互连接并装入机柜。试验系统控制逻辑采用某300MW 汽轮机发电机组ETS 要求,运用梯形图编程并运行于主控制器中。该系统通过了厂内长期通电试验,并反复进行输入数据采集表决、输出表决、输入/输出自测试、总线通信及故障检测等方面的测试,系统运行良好,其稳定性得到证明。
5 结语
本文设计了一种用于ETS 的TMR 平台。针对系统高可靠性要求,提出了系统各组成部分的架构及运行策略,通过环境适应性实验、长期通电试验及实际工程的现场调试与运行,证明了系统的可靠性和稳定性。改变系统主控制器中的控制策略,平台也可用于其他高可靠性要求的场合。通过扩展模拟量输入及表决机制,还可用于存在开关量和模拟量混合输入的高可靠性要求系统。
参考文献
[1]DL/T 596—1996 电力设备预防性试验规程.北京:中国电力
?研制与开发? 邹见效,等 一种三重化冗余危急跳闸系统设计与实现
出版社,1997.
[2]ABBAS A A ,MORSY M S ,TALAA T H E A ,et al.A
generator tripping emergency control strategy for dynamic security enhancement using rule based fuzzy assessment//Proceedings of t he Mediterranean Electrotechnical Conference ,May 729,2002,Cairo ,Egypt.Piscataway ,NJ ,U SA :IEEE ,2002:1372141.
[3]ZOU Jianxiao ,DEN G Erqiang ,XU Hongbing ,et al.Study on
communication strategy in triple
module
redundant
ETS
system//Proceedings of t he Eight h International Conference on Electronic Measurement and Inst rument s :Vol 1,August 16218,2007,Xi ’an ,China.Piscataway ,NJ ,USA :IEEE ,2007:4812485.
[4]何湘杰,张静.PLC 在汽轮机ETS 系统中的应用研究.汽轮机技
术,2005,47(3):2252226.
H E Xiangjie ,ZHAN G Jing.Study on application of PLC to ETS system of steam turbine.Steam Turbine Technology ,2005,47(3):2252226.
[5]吴天一,王兵,崔旭东,等.ETS 系统在24MW 汽轮机的应用实
现.石油化工自动化,2007,2:23225.
WU Tianyi ,WAN G Bing ,CU I Xudong ,et al.The application of ETS system in t he 24MW turbine set.Automation in Petro 2chemical Industry ,2007,2:23225.
[6]齐蓉,谢利理,林辉,等.三状态系统的可靠性冗余设计及冗余优
化.系统工程与电子技术,2003,28(8):103921041.
QI Rong ,XIE Lili ,L IN Hui ,et al.The redundancy of design and optimization for a t hree state system.Systems Engineering and Electronics ,2003,28(8):103921041.
[7]V YTOPIL J.Formal techniques in real 2time and fault tolerant
systems.Boston ,MA ,USA :Kluwer Academic Publishers ,1993.
[8]ZHAN G Kening ,BEDET TE G ,DEMARA R F.
Triple modular redundancy wit h standby (TMRSB )supporting
dynamic
resource
reconfiguration//
Proceedings of
IEEE Systems Readiness Technology Conference ,September 17220,2007,Baltimore ,MD ,USA.Piscataway ,NJ ,USA :IEEE ,2007:6902696.
[9]曾广商,沈卫国,石立,等.高可靠三冗余伺服机构系统.航天控
制,2005,23(1):35240.
ZEN G Guangshang ,SH EN G Weiguo ,SHI Li ,et al.High 2reliability triple redundancy servo mechanism system.Aerospace Control ,2005,23(1):35240.
[10]Genius modular redundancy user ’s manual.GF K 21277D.GE
Fanuc Automation Nort h America ,Inc ,2002.
[11]朱昆,方勇杰,范文涛,等.自适应紧急控制系统中的多任务处
理.电力系统自动化,2000,24(3):42244,59.
ZHU Kun ,FAN G Y ongjie ,FAN Wentao ,et al.Multi 2task processing in t he
adaptive
emergency
control
system.
Automation of Electric Power Systems ,2000,24(3):42244,
59.
[12]马连川,刘波.一种分布式三模冗余控制系统的实现.北方交通
大学学报,2000,12(5):1562158.
MA Lianchuan ,L IU Bo.Implementation of a distributed triple 2modular redundancy control system.Journal of Nort hern Jiaotong University ,2000,12(5):1562158.
[13]陈中,杜文娟,王海风,等.后紧急控制多代理信息系统容错技
术.电力系统自动化,2006,30(19):17220.
CH EN Zhong ,DU Wenjuan ,WAN G Haifeng ,et al.Fault tolerance technology of multi 2agent information system in post 2emergency control.Automation of Electric Power Systems ,2006,30(19):17220.
[14]POWELL D.GUARDS :a generic upgradable architecture for
real 2time dependable systems.IEEE Trans on Parallel and Distributed Systems ,1999,10(6):5802597.
邹见效(1978—
),男,通信作者,副教授,主要研究方向:测控系统、电力系统自动化、故障诊断。E 2mail :jxzou @https://www.360docs.net/doc/ec10422496.html,
徐红兵(1966—
),男,教授,主要研究方向:智能信息处理与控制。
张正迁(1984—
),女,工程师,主要研究方向:电力系统自动化。
Design and Implementation of a T riple Modular R edundancy Emergency T rip System
ZOU J ianx iao 1,X U Hongbing 1,Z HA N G Zhenqian 1,Z EN G B in 2
(1.University of Electronic Science and Technology of China ,Chengdu 610054,China ;2.Sichuan Dongfang Electric Auto 2Control Engineering Co.L td.,Deyang 618000,China )
Abstract :A triple modular redundancy (TMR )emergency trip system (ETS )for steam turbine is presented in detail.The signal sampler ,system bus ,decision unit and output modular are designed in TMR structure to satisfy the high reliability requirements.All the system modules ,with self 2testing and diagnosis f unction ,can be replaced online without affecting system operations.The host parameter synchronization scheme is designed to ensure the real 2time and accuracy of system response.The adaptive voting scheme considering self 2testing fault table of system modular is used to ensure the system reliability.The stability and reliability are attested by reliability analysis as well as field commissioning and operating.K ey w ords :triple modular redundancy ;emergency trip system ;reliability ;steam turbine ;self 2testing
2009,33(7
)
汽轮机危急保安系统系统简介
汽轮机危急保安系统系统简介 郭春晖 AST电磁阀的动作原理 在机组正常运行时,四只AST电磁阀是被通电关闭的,从而封闭了自动停机危急遮断(AST)母管上的EH油泄油通道,使所有蒸汽阀执行机构活塞下腔的油压能够建立起来。当电磁阀失电打开,则母管泄油,导致所有汽阀关闭而使汽轮机停机。AST电磁阀是串并联布置的,这样就有多重的保护性。每个通道中至少须一只电磁阀打开,才可导致停机。同时也提高了可靠性,四只AST电磁阀中任意一只损坏或误动作均不会引起停机。 下图是油路示意图,和我厂EH油系统图内AST电磁阀部分基本一致,为表述清楚,油路用不同颜色表示,红色油路是AST 母管,也称之为危急遮断油总管,绿色油路是有压回油母管,黄色油路是EH油供油母管,蓝色油路是OPC母管,也称之为超速跳闸母管,细心的读者可能会发现,我厂EH油系统图内的EH油供油母管是经过节流孔进入各AST电磁阀的,彩图来源于网络,黄色油管路并没有画出应有的节流孔,实际上是存在的。经节流孔来的EH高压抗燃油建立后,进入活塞室,克服弹簧的拉力而使活塞右移,堵住AST至回油的泄油阀,此时,位于左侧的AST 电磁阀电源带电关闭至回油的泄油孔,AST油压正常建立。而一旦AST电磁阀动作,使EH高压油回至油箱,活塞在弹簧的作用下向左移动,遮断油与回油接通、泄去这只AST阀的安全油。
电磁阀油路示意图 简化示意图
我厂EH油系统图 如图所示: AST1电磁阀与AST3电磁阀并联组成I通道,AST2电磁阀与AST4电磁阀并联组成II通道。任意一个通道之中的一个电磁阀
动作或两个全部动作,由于节流孔板的作用不会使AST母管的压力卸掉。两个通道中任意一个电磁阀或两个电磁阀同时动作,都会导致AST母管失压,汽轮机跳闸。 ASP油压的作用 ASP油压用于在线试验AST电磁阀。ASP油压由AST油压通过前置节流孔产生,再通过后置节流孔到无压回油。ASP油压从理论上来说是AST油压的一半。我公司ASP油压高报警值是 9.6Mpa,低报警值是4.8Mpa。当AST电磁阀1或3动作时,ASP 压力升高,ASP1压力开关动作;当AST电磁阀2或4动作时,ASP压力降低,ASP2压力开关动作。如果AST电磁阀没有动作时,ASP1或2压力开关动作,或AST电磁阀复位后压力开关不复位,就存在ASP油压报警。 两个节流孔板的作用是做试验的时候保持AST母管的压力。由于节流孔板的存在,ASP油压小于AST1与AST3电磁阀前的AST 母管压力,但大于AST2与AST4电磁阀后的无压回油管压力,当AST1或AST3电磁阀做试验的时候打开,高压开关感应到ASP压力增加,说明AST1与AST3正常动作,ASP-1报警;当AST2或AST4电磁阀做实验的时候打开,低压开关感应到ASP压力降低,说明AST2与AST4正常动作,ASP-2报警。 在机组运行时,如AST1或AST3电磁阀发生内漏,则ASP油压将升高,随着电磁阀的内漏量增大ASP油压升高,ASP1压力开关动作,发出ASP油压高报警;如AST2或AST4电磁阀发生内
汽轮机危急跳闸保护系统(ETS)检修维护技术标准2011.12
汽轮机危急跳闸保护系统(ETS)检修维护技术标准 批准:闫威力 复审:魏小兵 初审:张海舰 编制:张海舰
标准目录清单
汽轮机危急跳闸保护系统(ETS)检修维护技术标准 1 目的 1.1 规范检修行为,保证汽轮机危急跳闸保护系统(ETS)检修符合检修工艺质量要求、文明生产管理要求,责任到人。 1.2 本技术标准为所有参加本项目的工作人员所必须遵循的质量保证程序。 2 适用范围 2.1 适用于柳林电力有限责任公司#、#2机组汽轮机危急跳闸保护系统(ETS)的检修工作。 2.2 汽轮机危急跳闸保护系统(ETS)定期大、小修及日常维护消缺的检修工作。 2.2.1汽轮机危急跳闸保护系统(ETS)定期大、小修。 2.2.2汽轮机危急跳闸保护系统(ETS)的整体检查、测试。 2.2.3汽轮机危急跳闸保护系统(ETS)的一次元件拆除。 2.2.4汽轮机危急跳闸保护系统(ETS)的电缆检查测试、更换。 2.2.5汽轮机危急跳闸保护系统(ETS)的一次元件校验、定值检查。 2.2.6汽轮机危急跳闸保护系统(ETS)一次元件回装、测试。 2.2.7汽轮机危急跳闸保护系统(ETS)继电器、接触器检查测试。 2.2.8汽轮机危急跳闸保护系统(ETS)系统控制回路检查。 2.2.9汽轮机危急跳闸保护系统(ETS)动、静态传动试验。 3 作业前准备: 3.1检修开工条件: 3.2 测量工具及工器具准备详见附页2.1-2.2。 3.3 材料及备品配件准备详见附页3.1-3.2。
3.4 危险因素分析及控制: 1、办理合格工作票,并根据现场实际情况制定危险因素控制措施。 2、所有进入现场的工作人员的工作服必须符合《电业安全工作规程》的要求。 3、凡是动火时,要严格按照《安规》规定执行,防止火灾发生。 4、现场安装设备要轻拿轻放,防止损坏设备。 5、所有工作人员必须了解工作环境和工作内容,每天开工前,工作负责人要向全体工作人员交待安全措施和其它注意事项,对当天工作做好事故预想,制订防范措施。 6、对所有安全工器具和安全装置在检修前要进行测试,不合格的坚决不带入现场 7、工作监护人要认真履行监护职责,检查安全措施执行情况,文明施工情况,并监护到位。 8、所有工作人员必须听从指挥,统一调度。 9、全部工作结束后,要进行安全总结,做好记录。 4检修作业程序及质量验收标准: 公司技术监督 3
游戏设计之任务系统的构思
游戏设计之任务系统的构思 反观我们现在所有在玩的网游类游戏,我们不难发现的一个共同点就是,很多时候我们在玩的时候必须得按照设计师设计的初衷,来完全按照事先设定好的任务线来进行。不然的话,我们就不能使游戏继续进行下去。 可是有的时候我们并不想按照设定好的这个线路玩,那就需要对游戏的任务系统有一个修改。 一.任务系统的基本规则 一个完整的任务包含三块内容,触发任务——执行过程——完成任务。具备了这三个基本条件,就算是个完整的任务了,那么其中多种的形式变化以及内容表现的丰富性为任务体系增添了血肉。 1.任务触发 根据任务触发的形式不同,可以有很多种类的形式: 当满足一定条件的情况下,自动产生或固定NPC领取任务; 固定领取形式,是最简单的游戏任务触发形式,像玩家经过一段游戏时间后可以得到该任务一样的类型; 随机触发形式在任何场景任何等级段随机获得任务; 当然也可以由一部份人触发,完成后引发另一部分获得任务; 拾取或者使用特殊物品时触发任务,玩家从某个NPC处得到该任务,玩家进入某个区域后即触发该任务。 任务触发的情况可以是多种形式的组合,也可以是多种类型的组合,同时一个任务触发既满足条件触发形式、又满足了固定领取的形式。 2.任务引导 当然有游戏的任务触发,就必须要有任务的引导,不然的话玩家在找不到某些任务点交不了任务后,就不会获得良好的游戏体验,久而久之就会对该游戏丧失兴趣。所以指引玩家操作和明确系统功能,对玩家来说十分重要。 3. 任务的完成 任务完成过程会通过各种形式来进行,最基本的是通过与途中的各种敌人进行战斗,或是材料的收集。 战斗:只要验证所杀的怪物(数量)即可。这种任务在游戏中里所占比例最大,在网游的任务系统中也最常见,通过安排的剧情而完成该类任务。 所需消灭的怪物分为两类,一是普通的怪物,一是BOSS类怪物。普通的怪物就不必多说了,BOSS类怪物有些还需要触发条件,例如十字路口的狂热的维罗格任务,消灭半人马一定数量后才会出现,还有十字路口的艾其亚基任务,要在它的巢穴附近吹响号角来召唤它。 收集物品: 通过战斗击败某些怪物掉落物品,然后收集物品完成任务,当然也可以从地图上得某处采集可得,最简单的就是玩家在游戏中的商城中购买。 对话任务: 与指定NPC对话。
135MW汽轮机组危急遮断系统说明书(英文)
资料编号:71.D151.35-08E03 135MW TURBINE EMERGENCY TRIP SYSTEM SPECIFICATION 135MW汽轮机组危急遮断系统说明书 发布实施 中华人民共和国 上海汽轮机有限公司发布 此资料系上海汽轮机有限公司专有资料,属本公司产权所有。未经本公司书面同意,不准擅自
资料编号:71.D151.35-08E03 COMPILING DEPT.: 编制部门:自控中心 COMPILED BY: 编制:陈建2005.5 CHECKED BY: 校对:王正明2005.5 REVIEWED BY: 审核:王正明2005.5 APPROVED BY: 审定:杨炯2005.5 STANDARDIZED BY: 标准化审查: COUNTERSIGN: 会签: RATIFIED BY: 批准:
资料编号:71.D151.35-08E03 共 1 页 第 1 页 目 次 1. GENERAL ............... . (1) 2. EMERGENCY TRIP CONTROL BLOCK (1) 3. TEST BLOCK (2) 4. THRUST BEARING TRIP DEVICE (3) 5. ELECTROLCAL OVERSPEED TRIP DEVICE ...............4 6. PRINCIPLE OF CONTROL LOGIC ...... . (4) 6.1 TRIP LOGIC (4) 6.2 TRIP CONTROL LOGIC (5) 7. INTRODUCE OF ETS CABINET AND PANEL (6) 7.1 POWER SUPPLY (6) 7.2 PLC USING ANNOTATES (6) 7.3 OPERATOR PANEL (7) 8. TESTING (10) 8.1 LOW BEARING OIL TEST (10) 8.2 ELECTRICAL OVERSPEED TEST (11) 8.3 MECHANICAL OVERSPEED TEST (11) 9. NOTE. (12)
汽轮机危急跳闸系统
汽轮机危急跳闸系统(ETS)
目录 汽轮机危急跳闸系统(ETS) (1) 第1节汽机保护系统基本概念 (3) 第2节汽轮机保护原理和逻辑 (5) 第3节ETS系统常见故障及处理 (9)
第1节汽机保护系统基本概念 1、热工保护的概念及作用 随着汽轮机组容量的不断增大,蒸汽参数越来越高,热力系统越来越复杂。为了提高机组的热经济性,汽轮机的级间间隙、袖封间隙都选择得比较小。因汽轮机的旋转速度很高,心机组启动、运行或停机过程中,如果没有按规定的要求操作控制,则很容易使汽轮机的转动部件和静止部件相互摩跃引起叶片损坏、大轴弯曲、报力瓦烧毁等严重事故.为了保证机组安全启停和正常运行需对汽轮机组曲轴向位移、热膨胀、差胀、转速、振动、主轴偏心度等机械参数进行监视并对轴承温度、油压、真空、高加水位等热工参数进行监视和异常保护.当被监视的参数在超过规定值(报警值)通过声、光等报警信息提醒值班运行人员,及时向值班运行人员提供这些热工参数变化的信息。在自动调节系统和联动控制系统等自动处理热工参数的异常时,运行值班人员还可以采取其他必要措施。只有当所有上述处理措施均失效,同时异常情况不断发展甚至可能危及机组设备的安全时,自动保护系统的跳闸回路才使用最后的极端措施——保护装置动低关闭主汽门,实行紧急停机,确保机组设备及人身的安全。保护、连锁、程序控制的逻辑框图符号及意义见表1-1。 2、热工保护的特点 (1)热工保护是保证设备及人身安全的最高手段 一个热工保护系统大致可分成两级:事故处理回路及跳闸回路。事故处理回路是以维持机组继续运行不中断为目的;跳闸回路则以保护设备及人身的安全为目的。 (2)热工保护的操作指令拥有最高优先级 即在任何情况下,不允许人为干扰它的工作,更不允许在机组运行过程中切除或退出热工保护系统。 (3)热工保护系统必须与其他自动控制配合使用 在保护动作过程中,直接由专门的执行机构去独立完成(例如:汽轮机超速或低真空引起跳闸停 机)。一般在跳闸后还需通过联动控制去完成一系列操作。 (4)热工保护检测信息的可靠性高 由于保护系统最终是通过终止机组的运行来保证设备及人身安全的,因此,对保护系统检测信息的可靠性要求极高。一般必须是独立的检测系统,如果检测信息不准确,就会引发保护
【精品策划】系统策划:任务系统设计思路
公司简介 商业计划书 创业计划书 节日庆典 新品发布会 创业融资 项目介绍 模板 策划 项目汇报 市场营销 活动策划 工作计划 策划书 营销管理 节日策划 推广策划 策划方案 商务策划 工作汇报 企业报告 企业宣讲 校园宣讲 总结报告 总结汇报 个人总结 工作总结 工作报告 模板 教育教学 教育培训 教学课件 主题教育 班会育人 教学计划 班会 课件 教学研究 模板 家长会 思想教育 小学教学 中学教学 大学教学 幼儿教学 系统策划:任务系统 设计思路 2019-2020版 内部资料 注意保管
系统策划:任务系统设计思路 一.为什么要设计任务系统 1.体现世界观世界观 指主线剧情,历史背景,塑造主角的成长历程。 WOW中的任务虽然不是必须完成的,但是顺着部落主线的剧情延伸至南海镇的任务却是很明显的主线剧情,从亡灵新手村学会了如何和死尸打交道,并且如何与已故的亡灵战士沟通成了亡灵族的本能,那么下面任务就是完成赫尔库拉的复仇任务。 //希尔斯布莱德丘陵的赫尔库拉的复仇任务,部落的做这个任务有点难度,因为目的地是联盟的城镇,很容易被卫兵和联盟的玩家追杀。经历N次复活的艰辛之后,努力终于有了回报,复活后的赫尔库拉召唤出一群骷髅兵攻击南海,虽然。。。最终还是难免被南海的卫兵围殴至死,不过咱心里还是爽了一把。 2.营造世界氛围 指支线剧情,烘托世界营造世界环境,以及地区性特点的营造。这个任务是营造了烈日石居的地区特征,一个被污染的土地,那么崇尚自然的牛头族的希望是什么,是为这片不毛之地带来新的生机。 //种植盖亚之种将10枚盖亚之种种植在盖亚土堆中,然后与烈日石居的塔姆拉谈一谈。如你所见,盗贼,我纯净的心灵可以为这片不毛之地带来新的生机。你必须将这些种子种植在破坏之源中,在西边的焦炭谷里就是破坏大自然的源泉——这片被污染的土地上到处都是鹰身人和凶恶的火元素。邪恶狂风,拿着这些附有魔法的盖亚之种,把它们种植在盖亚土堆里。 3.角色扮演的真实体验 模拟真实的事件流程以及所参与的人物。 《驯服的科多兽》的任务便是让你体验如何驯服一头巨大的科多兽,既要避免成年科多兽的攻击,又要引诱老年的科多兽进入你的圈套。 //带5头驯服的科多兽和科多兽诱引器给瑟卡布斯库营地的斯米德?瑟卡布斯库。比布莱认为他是凄凉之地唯一一个懂得赚钱的地精。好吧,想要让旅团闯过这块地方就要靠我了。因为我懂得利用我的科多兽诱引器控制年老的和濒死的科多兽,所以我和旅行队的主人科克,瑞格进行了合作。把科多兽诱引器拿去使用在任何年老的或者濒死的科多兽身上。然后那个野兽就会变成驯服的科多兽然后会跟着你。一旦你驯服了一头科多,那就把它带来给我吧。
危急遮断系统介绍
危急遮断系统( ETS )介绍 1、系统概述: 汽轮机危急遮断系统(ETS),根据汽轮机安全运行的要求,接受就地一次仪表或TSI二次仪表的停机信号,控制停机电磁阀,使汽轮机组紧急停机,保护汽轮机的安全。危急遮断系统(ETS)对下列参数进行监视,一旦参数超越正常范围,通过停机电磁阀,使所有阀门油动机关闭。 ETS装置通过各传感器监测着汽轮机的运行情况(见图1、ETS系统图)。具体监测的参数为: ·汽机超速110% · EH油压低 ·润滑油压低 ·冷凝器真空度低 ·推力轴承磨损(轴向位移大) ·由用户决定的遥控遮断信号 ETS系统应用了双通道概念,允许重要信号进行在线试验,在线试验时仍具有保护功能。 2、系统组成: ETS系统由下列各部分组成:一个安装遮断电磁阀和状态压力开关的危急遮断控制块、四个安装压力开关和试验电磁阀的试验遮断块、三个转速传感器、一个装设电气和电子硬件的控制柜以及一个遥控试验操作面板。 汽轮机上各传感器传递电信号给遮断控制柜,在控制柜中,控制器逻辑决定何时遮断自动停机危急遮断总管的油路。
2.1 危急遮断控制块 危急遮断控制块当自动停机遮断电磁阀(20/AST)励磁关闭时,自动停机危急遮断总管中的油压就建立。为了进行试验,这些电磁阀被布置成双通道。一个通道中的电磁阀失磁打开将使该通道遮断。若要使自动停机遮断总管压力骤跌以关闭汽机的蒸汽进口阀门,二个通道必须都要遮断。 20/AST电磁阀是外导二级阀。EH抗燃油压力作用于导阀活塞以关闭主阀。每个通道的导阀压力由63/ASP压力开关监测,这个压力开关用来确定每个通道的遮断或复通状态,以及作为一个联锁,以防止当一个通道正在试验时同时再试另一个通道。 2.2 危急遮断试验块 每个试验块组装件由一个钢制试验块、二个压力表、二个截止阀、二个电磁阀和三个针阀组成。每个组装件被布置成双通道。安装在前轴承座上的试验块组装件(该组装件一侧是从系统供油经节流孔流入,而另一侧与泄油或通风阀相连)与安装在附近的端子箱上的压力开关相连接。在每个通道中均有一个节流孔,以使试验时被检测参数不受影响。在供油端有一个隔离阀,它允许试验块组件检修时不影响系统的其他部分。 为了更换试验块上除压力表外任一元件,首先必须关闭隔离阀,然后打开手动试验阀泄放试验块中的介质。在更换时,须确保遵守相应的清洁、清洗抗燃油的维护及管理程序等。压力开关和压力表可以关闭相应的截止阀而从系统中隔离出来。在试验块中的介质被泄放后,这些截止阀就应打开,以保证在复置自动停机前,全部截止阀是重新开启的。
第六章危急跳闸保护系统
第六章危急跳闸保护系统 第一节概述 在机组运行中,为防止部分设备失常造成汽轮机严重损坏,本机组装有危急跳闸保护(AST)。 在发生异常情况时,使汽轮机危急停机,保护汽轮机安全。危机跳闸系统监视汽轮机的某些参数,当这些参数超过其运行限制值时,该系统就关闭全部汽轮机蒸汽进汽阀门。另外汽轮机还装有超速保护系统(OPC)。当电网全部故障时发电机负荷较大幅度减少时,为防止汽轮发电机与电网解列后,造成重新并网的困难,以及防止解列以后造成电网不稳定,超速保护系统使调节阀暂时关闭,减少汽轮机的进汽量及功率,待电网故障排除后再重新开启。因此本机组设有AST和OPC。危急跳闸系统监视汽机的某些运行参数,当这些参数超过其运行限制值时,该系统就送出遮断信号关闭全部汽轮机蒸汽进汽阀门。被监视的参数有如下各项:汽轮机超速、推力轴承磨损、轴承油压过低、冷凝器真空过低、抗燃油油压过低。另外,还提供了一个可接所有外部遮断信号的遥控遮断接口。危急跳闸系统的主要执行元件由一个带有四只自动停机遮断电磁阀(20/AST)和二只超速保护控制阀 (20/OPC)的危急遮断控制块(亦称电磁阀组件)、隔膜阀、空气引导阀和几只压力开关等所组成。 第二节主要设备及结构 1.四只自动停机电磁阀(20/AST) 在正常运行时,它们是被通电励磁关闭,从而封闭了自动停机危急遮断(AST)母管上的抗燃油泄油通道,使所有蒸汽阀执行机构活塞下腔的油压能够建立起来。当电磁阀失电打开,则总管泄油,导致所有汽阀关闭而使汽机停机。电磁阀(20/AST)是组成串并联布置,这样就有多重的保护性。每个通道中至少须一只电磁阀打开,才可导致停机。同时
库存管理系统设计与实现任务书
毕业设计(论文)任务书 学院(系、部)专业班级 学生姓名指导教师/职称 1.毕业设计(论文)题目 2.任务起止日期: 2012年 2 月 20 日至 2012 年 6 月 8 日 3.毕业设计(论文)的主要内容与要求(含原始数据及应提交的成果) 随着我国经济的飞速发展,各种类型规模的公司企业迅速崛起,许多从事生产和经营管理的企业都有自己生产和销售的产品,而这些产品都需要储存在仓库中,对于每个企业来说,随着企业规模的不断扩大,产品数量的急剧增加,所生产产品的种类也会不断地更新与发展,有关产品的各种信息量也会成倍增长。面对庞大的产品信息量,如何有效地管理库存产品,对这些企业来说是非常重要的,库存管理的重点是销售信息能否及时反馈,从而确保企业运行效益。而库存管理又涉及入库、出库的产品、经办人员及客户等方方面面的因素,如何管理这些信息数据,是一项复杂的系统工程,充分考验着仓库管理员的工作能力,工作量的繁重是可想而知的,所以这就需要由库存管理系统来提高库存管理工作的效率,这对信息的规范管理、科学统计和快速查询,减少管理方面的工作量,同时对于调动广大员工的工作积极性,提高企业的生产效率,都具有十分重要的现实意义。 本软件系统拟采用用C++技术编成,结合SQL Server 2005数据库强大的后台支持联合开发,完成一个交互性良好的、具有实际使用价值的应用型的办公软件系统的设计,较为周全的考虑实际工作中要求的相关系统配置、人员管理、项目管理、工作管理等的功能的实现,具备美观的操作和管理界面,提供优良的运行性能以及相关安全性考虑。 应提交的成果 1.开题报告 2.外文资料原文与译文 3.系统软件1套(源程序和安装包) 4.毕业论文资料一套(含开题报告、翻译资料中英文、毕业论文含任务书打印和电子文档CD)4.主要参考文献 [1] 启明工作室.SQL Server 2005数据库应用系统开发.北京:人民邮电出版社,2007.7 [2]陈维兴,林小茶.第2版.C++面向对象程序设计教程.北京:清华大学出版社,2004.8 [3] 辛长安,梅林编著.VC++编程技术与难点剖析.北京:清华大学出版社,2002.33-56 [4] 赛奎春.SQL Server数据库开发实例解析(附光盘) .北京:机械工业出版社,2006-01出版 [5] vor Horton,李颂华,康会光.Visual C++ 2005入门经典(Wrox红皮书) 北京:清华大学出版社,2007-01出版 [6] 王珊,萨师煊.第4版.数据库系统概念.北京:高等教育出版社,2006.5 [7] 张海藩,倪宁.第3版.软件工程.北京:人民邮电出版社,2010.2
操作系统课程设计任务书
《操作系统》课程实验指导书 一、设计题目 题目一:模拟实现页式虚拟存储管理页面置换算法 题目二:模拟实现虚拟存储管理(请求分页存储管理) 题目三:模拟实现可变分区存储管理 题目四:模拟实现算法多级反馈队列进程调度算法 题目五:模拟银行家算法 二、设计目的 《操作系统》课程实验是计算机类专业的集中实践性环节之一,是学习完《操作系统》课程后进行的一次全面的综合练习。其目的在于加深对操作系统课程的理解,使学生更好地掌握操作系统的基本概念、基本原理、及基本功能,理解操作系统在计算机系统中的作用、地位和特点,具有分析实际操作系统,设计、构造和开发现代操作系统的基本能力,为今后从事的各种实际工作,如设计、分析和改进各种系统软件和应用软件提供必要的软件理论基础。 、设计内容 设计内容一页式虚拟存储管理页面置换算法 1.目的和要求 在熟练掌握计算机虚拟存储技术的原理的基础上,利用一种程序设计语言模拟实现几种置换算法,一方面加深对原理的理解,另一方面提高学生通过编程根据已有原理解决实际问题的能力,为学生将来进行系统软件开发和针对实际问题提出高效的软件解决方案打下基础。
2.设计内容 阅读教材《计算机操作系统》第四章,掌握存储器管理相关概念和原理。 模拟实现页式虚拟存储管理的三种页面置换算法(OPT、FIFO和LRU),并通过比较性能得出结论。 前提: (1)页面分配采用固定分配局部置换。 (2)作业的页面走向和分得的物理块数预先指定。可以从键盘输入也可以从文件读入。 (3)置换算法的置换过程输出可以在显示器上也可以存放在文件中,但必须清晰可读,便于检验。 3.设计环境 Windows操作系统、VC++6.0 C语言 4.设计提示 (1)基础知识 存储管理是操作系统进行资源管理的一个重要功能。现代操作系统广泛采用虚拟存储的技术对内存进行扩充。实现虚拟存储的一个主要技术手段就是将辅存和主存统一管理,在二者之间进行对换,从而形成物理上两级而逻辑上一级的存储管理系统。一个置换算法的好坏对这个逻辑上的单级虚存的性能起着极其重要的作用,而且会影响处理机的调度性能。 对于本任务规定的前提:页面分配采用固定分配局部置换,则置换发生的时机是作业已经将操作系统分配的固定数目的物理块全部用完且发生缺页的时候。此时必须要将已经装入内存的部分逻辑页面换出以便将所缺的页面调入内存。置换算法就是一个决定将内存中“哪一个”页面换出的算法。 (2)数据结构
项目管理系统毕业设计任务书
毕业设计(论文)任务书 题目:基于.NET的项目管理系统的设计与实现 专业:计算机科学与技术指导教师: 学院:信息学号: 2008080305325 班级: 200808030501A 姓名: 一、主要内容和基本要求 该毕业设计题为《基于.NET的项目管理系统的设计与实现》,主要运用C#语言进行开发,数据库采用MSSQL Server 05,将运行于安装有.NET Framewrok3.5以上的Windows系统平台上。该设计的主要内容包括: ①资源管理:主要为人员管理,包括人员基本的增删改查,角色分配等。 ②交付管理:项目经理录入、维护项目基本信息(包括一般信息、客户信息、分包商信息、财政信息、申请人员信息、项目经理等)、费用预算,建立项目里程碑,制定项目计划,管理项目风险;系统每周一凌晨计算分析上周人员、项目的收支情况以及费用管理员导入的其他ERP系统导出的报销费用明细;相关人员可以查询上述基本信息和统计分析图表(下钻)展示。 ③TIMESHEET管理:项目经理填写和提交项目组成员工时,以记录、查询出勤情况,同时也为项目实际开支计算提供基础数据。 ④系统管理:主要为用户管理。给用户分配角色和机构权限。 二、主要参考资料 [1]刘智勇,王文强.JavaScript从入门到精通[M].北京:化学工业出版社,2009:261-269. [2]奚江华https://www.360docs.net/doc/ec10422496.html,3.5开发详解Ⅱ——新功能篇[M].北京:电子工业出版社,2008:174-176. [3]w3school. 领先的Web技术教程.[EB/OL].[2011]. https://www.360docs.net/doc/ec10422496.html,/. [4]李力.企业项目管理系统的设计与实现[D].南开大学,2009. [5]应尚军,王炎.项目管理的研究现状与研究前景[J].科技进步与对策,2005,22(11):131-133. [6]袁经勇.国内外项目管理现状及发展趋势[J].化工建设工程,2001,23(3):8-9,12. [7]北京维普时代软件有限公司.成功案例.[OL] https://www.360docs.net/doc/ec10422496.html,/index.asp [8]金平.企业项目管理系统的分析与设计[J].中国制造业信息化,2009,38(9):10-12.
汽轮机危急跳闸装置(ETS) 原理
汽轮机危急跳闸装置(ETS)原理 一、概述: ETS(EMERGENCY TRIP SYSTEM)是汽轮机危急跳闸系统的简称。危急跳闸系 统用以监视汽轮机的某些参数,当这些参数超过其运行限制值时,该系统就关闭全部汽轮机蒸汽进汽阀门,紧急停机。这些参数是: 1. 超速跳闸 2. 真空低跳闸 3. 润滑油压低跳闸 4. EH油压低跳闸 5. 轴向位移大跳闸 6. 排汽温度高跳闸 7. 汽机振动大跳闸 8. 相对膨胀大跳闸 9. 轴承金属温度高跳闸 ETS提供8路备用用户停机接口,实现其它辅助系统对汽轮机的跳闸控制。 系统应用了双通道概念,布置成“或-与”门的通道方式,这就允许在线试验,并在试验过程中装置仍起保护作用,从而保证此系统的可靠性。 二、工作原理: 该系统是由下列各部分组成: 一台跳闸控制柜;一个装有跳闸电磁阀和状态压力开关的危急跳闸控制块;ETS 操作盘一块。 控制柜一般放在电子间,ETS操作盘装在控制柜上。
系统机柜中采用两套PLC并联运行,即定义为A机和B机,当A机故障时,使得奇数通道(即通道1)跳闸;当B机故障时,使得偶数通道(即通道2)跳闸。 操作盘上设有跳闸“首出”信号记忆灯,且每一组信号都可以给出“首出”记忆信号,即第一个到来的跳闸信号指示灯闪动亮,其它跳闸信号指示灯常亮,手动复位后,跳闸信号消失。并且每一组信号可以给出两路输出,一路信号到DCS,另一路到光字牌。 1.跳闸块工作原理: 跳闸块安装在前箱的右侧,块上共有6个电磁阀,2个OPC电磁阀是220VDC,常闭电磁阀;4个AST电磁阀是220VDC,常开阀。正常情况下,AST电磁阀是常带电结构。 P1点压力为130kg/cm 左右。通过节流孔J1、J2使P2点压力为65kg/cm 左右。在作实验时,20-1/AST和20-3/AST动作,使得P2点压力升高至130kg/cm 若20-2/AST和20-4/AST动作,则P2点压力降为0kg/cm 。压力开关K1、K2设定值分别为K1:90kg/cm ,K2:40kg/cm 。通道1(20-1/AST,20-3/AST)动作试验时,K1动作,通道2(20-2/AST,20-4/AST)动作试验时,K2动作;K1、K2分别送出指示信号。 由于整个跳闸块采用“双通道”原理,当一个通道中的任一只电磁阀打开都将使该通道跳闸;但不能使汽轮机进汽阀关闭,只有当两个通道都跳闸时,才能使汽轮机进汽阀关闭,起到跳闸作用,因此大大提高其可靠性,可有效地防止“误动”和“拒动”。 2.ETS控制柜: ETS控制柜是系统的核心部分,完成系统的控制和监视。它是由逻辑组件、电源组件及端子排组成。 机柜上部装有ETS电源一台,中间部分为ETS操作盘。机柜下部为两组PC机。机柜端子排上留有远控停机及远方复位接口,以便远方进行打闸停机及复位操作。 2.1、操作盘: 操作盘上设有跳闸指示灯、电源状态指示灯及手动跳闸按钮、试灯按钮和跳闸 复位按钮;并设有20/AST-1、20/AST-2、20/AST-3、20/AST-4四个在线试验按钮。在操作盘中间还有一个钥匙开关,设有三种运行工况,即:超速抑制、运行、在线试验。
汽轮机危急跳闸系统配置分析
汽轮机危急跳闸系统配置分析 生产安全越来越受到人们的重视,因此各种保护系统也应运而生,各种不同的配置有各自的特点,文章分析了常用的几种配置特点。希望通过文章的分析,对相关工作提供参考。 标签:汽轮机;危急跳闸系统;配置分析 1 系统功能 汽轮机危急跳闸系统在机组危急时刻能够紧急跳闸停机,保证人身和机组安全。此系统主要有三大功能:危急跳闸、在线试验和首出记录。 危急跳闸的触发条件有很多种,根据来源主要分为三大类: (1)汽轮机自身运行参数不正常,可以防止汽轮机自身损坏。比如轴振动大、超速等。 (2)其他系统出现问题,不能继续运行,迫使汽轮机跳闸。比如锅炉故障、发电机故障等。 (3)手动停机。由于整个发电系统非常复杂,在某些情况下虽然运行参数没有到达跳闸条件,但是运行人员根据经验可以紧急跳闸。 在线试验功能同样非常重要。危急跳闸系统通过控制AST跳闸电磁阀动作,卸掉阀门压力油,快速关闭所有阀门,从而实现机组停机。可见跳闸电磁阀非常重要,需要定期进行试验,从而保证其好使,在真正危急时刻能够成功动作。在跳闸条件中有几个信号同样重要,因此也设计了在线试验功能,它们通常是:抗燃油压低、润滑油压低和凝汽器真空低等。 机组紧急停机后要分析其停机原因,排除故障。此时首出功能的作用就体现出来了。所有的跳闸条件都进入危急跳闸系统,其中一个条件满足时就会导致机组跳闸,但是在极短时间内可能先后触发很多条件,对判断故障产生干扰。危急跳闸系统运行的扫描周期非常快,是毫秒级别,可以很容易的記录最先到来的跳闸条件,帮助故障分析。 详细了解了此系统的功能后,即可根据需求进行配置。 2 硬件架构 汽轮机危急跳闸系统本身需要的逻辑功能并不复杂,简单的与或非就能实现全部运算,但是要求扫描周期短、系统可靠。因此PLC就成为比较理想的选择。
汽轮机紧急跳闸系统的设置原则
汽轮机紧急跳闸系统的设置原则 作者:张烈,吕凯,熊巍 摘要: ETS是机组在紧急情况下迅速关闭汽轮机所有进汽阀,停止汽轮机运行的控制系统,其主要任务是监视对机组安全运行有重大影响的某些参数。当这些参数超过安全运行限定值时,通过自动停机跳闸(AST)电磁阀失电控制汽轮机保安系统,关闭汽轮机全部蒸汽进汽阀,紧急停机。ETS主要由控制部件、电气保护装置及现场检测元件等组成。由于ETS对汽轮机安全运行起着至关重要的保护作用,所以在设计和调试中必须保证其高可靠性。本文将对采用可编程逻辑控制器(PLC)或DCS的ETS设置原则及方法进行探讨。 一、ETS的设置原则 (1)采用PLC的ETS应为一个独立的系统,即具有独立的采用冗余电源的供电系统。在DCS内完成的ETS应采用独立的控制器。 (2)各个保护控制信号均应使用硬接线接入ETS中,减少保护控制信号的中间环节和延迟时间,避免转接、扩展和转换。保护控制信号不可使用串接信号,应为独立信号。 (3)4个AST电磁阀一般应设置为失电动作方式,且采用2路电源切换后的冗余电源。当系统中没有电源切换装置时,1号、3号和2号、4号AST电磁阀应分别采用不同的2路电源。 (4)ETS必须冗余配置,即当故障时,备用系统仍然具有使汽轮机停止运行的功能。故障系统可进行在线维修、更换。 (5)ETS应具有首出跳闸原因的记录功能。 (6)仅作为报警监视而不控制停机的信号不应进入ETS,并且跳闸汽轮机联动
其它设备的功能不应在ETS内完成,以保证紧急停机的快速性及可靠性。 (7)ETS在未接到挂闸或复位指令前,不允许自动复位或使汽轮机挂闸,更不允许自动打开汽轮机进汽阀。 (8)一般不允许设置保证投、切开关,以免保护功能被错误地切除。在特殊情况下,必须具备保护投、切开关时,该开关必须具有可记录的功能,保护切除后,应有报警提示。 二、ETS与其它系统的关系 ETS与数字式电液控制系统(DEH)、汽轮机监视仪表(TSI)、炉膛安全监控系统(FSSS)、发变组保护系统以及汽轮机本身互相联系。因此,在进行ETS设计和调试时必须结合各系统的具体情况,考虑各系统之间的相互关系和接口。2.1 与DEH的关系及接口 DEH完成汽轮机的挂闸、转速控制、负荷控制、压力控制及对机组进行各种监视、调节和限制等。ETS在DEH无法将汽轮机参数限制在正常范围内,并且该参数达到或超出汽轮机安全运行限制值时,紧急停止汽轮机的运行。ETS与DEH的主要接口信号: (1)汽轮机挂闸信号是指由DEH送至ETS的远方挂闸指令信号,一般设置为脉冲信号,目的是由远方操作建立安全油压,同时使AST电磁阀带电,打开汽轮机进汽阀门。 (2)DEH失电汽轮机跳闸信号一般来自DEH基本控制柜,为两路220VAC电源均故障的接点闭合信号,该信号与DEH采用的控制系统有关,有的控制系统没有电源监视继电器(如美国西屋控制公司生产的Ovation系统),则无此项保护功能。 (3)汽轮机110%电超速跳闸信号。DEH内有3个测量汽轮机转速的探头,经
机组跳闸汽轮机ETS 无跳闸首出原因分析
机组跳闸汽轮机ETS 无跳闸首出原因分析 [摘要] 某厂汽轮机组在紧急跳闸系统无任何跳闸首出的情况下主汽门 关闭,导致发电机 跳闸,锅炉主燃料跳闸保护动作。分析了可引起该问题的几种可能原因:就地手动打闸停机, 危急遮断器动作,热工控制系统故障等,同时给出了预防、改进措施。[关键词] 汽轮机组;跳闸首出;危急遮断装置;调节系统;挂闸 系统简介 某厂1 号汽轮机组(300 MW)数字电液调节系 统(以下简称DEH)采用ABB 公司生产的Symphony 系统,ETS(紧急跳闸系统)采用该厂随机组配供的 控制系统,内部逻辑采用了MODICON 系列可编程 控制器,跳闸首出记忆信号送入新华DCS 系统。机 组于2006-12 投入商业运行。汽轮机组危急遮断系 统。 2 故障过程及现象 (1)2010-06-07T09:34:30 机组负荷198.5 MW, 汽轮机转速3 000 r/min,抗燃油压力14.5 MPa,机 组运行正常; (2)09:34:31 汽轮机主汽门关闭,机组负荷突 然降至0 MW,主汽压力升高,汽轮机转速下降;发 电机逆功率保护动作,机组跳闸,跳闸历史记录曲线 如图2。机组跳闸时,汽轮机ETS 跳闸画面无任何跳 闸首出; (3)09:34:32 锅炉MFT 动作。锅炉MFT 跳闸 首出“汽轮机跳闸”。 经过调取历史曲线,“汽轮机跳闸1、2、3”没有 动作历史,而主汽门关闭反馈有反转信号,从而确认 汽轮机跳闸信号是主汽门关闭所致;高压主汽门、中 压主汽门确定已经关闭,即抗燃油系统油压消失。汽 轮机跳闸后,紧急跳闸系统无任何跳闸首出。 3 原因分析 该机组的挂闸过程为:远方DEH 系统给出挂闸 指令→复位电磁阀1YV 带电,将0.2 MPa 左右的透
汽轮机危急遮断系统ETS
汽轮机危急遮断系统ETS 1 系统简介 为了保证机组的安全运行,汽轮机设置自动停机遮断系统即ETS,其主要功能就是监视汽轮机的某些运行参数,当这些参数超过某运行限制值时,该系统动作,关闭高、中压主汽门和高、中压调速汽门。 1.1 主要监视参数 ETS系统监视的主要参数有:主机转速、主机轴向位移、主机润滑油压力、EH油压力、汽机振动大(VB)、凝汽器真空及其他需要监视并用于跳机的保护(炉MFT、发电机主保护动作、DEH失电等)。1.2 系统组成 ETS控制系统由保护机柜、冗余电源组件、冗余中央控制处理单元及其输入输出卡件、隔离或扩展继电器、冗余跳闸电磁阀、试验电磁阀、压力开关、在线试验操作盘等组成。其中保护机柜有两排可编程逻辑控制器(PLC)组件,一个超速控制箱,三个带处理和显示功能的转速继电器,一个交流电源箱,一个直流电源箱以及位于控制柜背后的两排输入输出端子(U1——U4)。 另外两套PLC共用一组I/O卡件,两组处理器单元(含CPU卡,I/O接口卡,电源卡,通讯卡)互为备用,两CPU卡中所存遮断逻辑完全一致。 三个转速继电器均能够将独立的磁阻发送器的输入信号进行数字处理,并且当转速超过继电器设定点时,继电器的触点闭合或断开。在每个转速继电器中有二个转速设定点触发二个独立的继电器,并提
供转速指示,S1为正常超速设定点,通常被设定为额定转速的110%(3300 r/min),S2定义提高的超速设定点,通常定义为额定转速的114%(3420 r/min)。 三只磁阻传感器探头探测转速。当PLC逻辑指示出三个转速继电器中有两个转速超出设定点,PLC就发出超速信号遮断汽轮机,这样可以防止因一个传感器或转速继电器出故障,引起汽轮机遮断的误动或者拒动。 两排端子向用户提供现场输入输出信号接口。 交流电源箱要求两个独立的交流电源。如果一个电源出故障,ETS 仍然具有保护作用,机组仍可继续运行。 两路独立的交流电源由控制柜下部的交流电源盒馈入。 1.3 用户接口 操作员试验面板安装在控制室作为操作员的监测及操作之用。ETS柜的现场接口有2排共80芯的端子排,端子提供了与下面设备相连的接点: 1)来自三个独立的转速探头的信号 2)到遮断电磁阀的电源 3)监测遮断状况的压力开关 4)对汽机运行时重要的监视参数,如轴承油压、EH油压和冷凝 器真空度等进行监测的压力开关。 5)来自TSI的轴向位移输出接点 6)试验电磁阀
任务系统设计思路.doc
任务系统设计思路 一.为什么要设计任务系统 1.体现世界观世界观 指主线剧情,历史背景,塑造主角的成长历程。 WOW中的任务虽然不是必须完成的,但是顺着部落主线的剧情延伸至南海镇的任务却是很明显的主线剧情,从亡灵新手村学会了如何和死尸打交道,并且如何与已故的亡灵战士沟通成了亡灵族的本能,那么下面任务就是完成赫尔库拉的复仇任务。 //希尔斯布莱德丘陵的赫尔库拉的复仇任务,部落的做这个任务有点难度,因为目的地是联盟的城镇,很容易被卫兵和联盟的玩家追杀。经历N次复活的艰辛之后,努力终于有了回报,复活后的赫尔库拉召唤出一群骷髅兵攻击南海,虽然。。。最终还是难免被南海的卫兵围殴至死,不过咱心里还是爽了一把。 2.营造世界氛围 指支线剧情,烘托世界营造世界环境,以及地区性特点的营造。这个任务是营造了烈日石居的地区特征,一个被污染的土地,那么崇尚自然的牛头族的希望是什么,是为这片不毛之地带来新的生机。 //种植盖亚之种将10枚盖亚之种种植在盖亚土堆中,然后与烈日石居的塔姆拉谈一谈。如你所见,盗贼,我纯净的心灵可以为这片不毛之地带来新的生机。你必须将这些种子种植在破坏之源中,在西边的焦炭谷里就是破坏大自然的源泉——这片被污染的土地上到处都是鹰身人和凶恶的火元素。邪恶狂风,拿着这些附有魔法的盖亚之种,把它们种植在盖亚土堆里。 3.角色扮演的真实体验 模拟真实的事件流程以及所参与的人物。 《驯服的科多兽》的任务便是让你体验如何驯服一头巨大的科多兽,既要避免成年科多兽的攻击,又要引诱老年的科多兽进入你的圈套。 //带5头驯服的科多兽和科多兽诱引器给瑟卡布斯库营地的斯米德·瑟卡布斯库。比布莱认为他是凄凉之地唯一一个懂得赚钱的地精。好吧,想要让旅团闯过这块地方就要靠我了。因为我懂得利用我的科多兽诱引器控制年老的和濒死的科多兽,所以我和旅行队的主人科克,瑞格进行了合作。把科多兽诱引器拿去使用在任何年老的或者濒死的科多兽身上。然后那个野兽就会变成驯服的科多兽然后会跟着你。一旦你驯服了一头科多,那就把它带来给我吧。 4.系统关键点,功能开启。 触发特殊系统功能的开启。WOW世界中的职业任务是系统功能的开启,任务完成之后将会获得本职业的特定技能或者特定的技能道具。以下是部落萨满的水图腾任务。 //到南贫瘠之地去找到布瑞恩。关于水,有一点是你必须要了解的:水意味着重生。水流动着,消蚀和清洗一切事物。水的治疗和恢复能力是无与伦比的,但这只有在水是完全纯洁的情况下。如果水受到了污染,那么它将毁灭一切它接触到的东西。理解了这一点,你就应该能明白保证水源的纯洁性是多么的重要。如果你想要得到水之灵契,就到南贫瘠之地去找布瑞恩吧,她的家园最近时常受到野猪人的骚扰。 5.任务引导
汽轮机AST遮断详解
汽轮机AST遮断详解 4只AST电磁阀分为两个通道。通道1包括20-1/AST与20-3/AST,而通道2则20-2/AST与20-4/AST。每一通道由在危急遮断系统控制柜中各自的继电器保持供电。危急遮断系统的作用为,在传感器指明汽轮机的任一变量处于遮断水平时,打开所有的AST电磁阀,以遮断机组。系统设计成在任一电磁阀故障拒动时,不会影响系统功能。这就是如前所述,设计成两相同独立通道的原因。每一通道有其本身的继电器、电源和监测所有汽机遮断变量的能力。遮断汽轮机需要两个通道同时动作。如果发生一偶然性遮断事故,至少在每一通道中有一AST电磁阀应动作,才能遮断汽轮机。每一通道可以分开地在汽轮机运行时作试验而不会产生遮断或实际需要遮断时拒动。在试验时,通道的电源是隔离的,所以一次只能试验一个通道
图中黄线表示高压油,红线表示AST油,绿线表示无压回油。四个AST电磁阀分别是1、2、3、4。1、3一组,2、4一组。我们先以图中AST1阀为例,介绍一下(注意,只看图中SAT1 部分)。SAT是个二级阀,电磁阀带点后,图中左侧Y型的小阀关闭,高压油进入后形成压 力腔室,顶住图右侧阀座,封住AST油通道。反之,电磁阀失电,左侧小阀打开,高压油 卸掉,右侧阀座在弹簧作用下打开,AST油卸掉。但AST1中的AST油只能卸到AST2、4中, 如果2、4中没有一个动作,AST油是卸不掉的。所以,一组中至少有一个阀动作,才能卸掉。就是说,4个阀中任何一个误动,AST油压是卸不掉的。如果动作时,任何一个拒动, 都不会造成油压无法卸掉。 第一部分:图1中的红线就是EH油泵出来的油经过每个油动机内部的一个节流孔和一个逆 止阀后出油动机来到AST母管的AST油(其实OPC油也是这样来的,只不过OPC油是经过调门 油动机出来到OPC母管,而AST油是经过主汽门油动机出来来到AST母管,而且OPC母管到AST母管是有个单向阀的,也就是说OPC这路能到AST,但是AST这路不能到OPC,所以当OPC 电磁阀动作,OPC油卸压后是调门关闭而主汽门不动作,但是如果AST电磁阀动作,AST油 卸压后,由于OPC的压力比AST高,所以OPC也通过单向阀流到AST管路而同时卸压,这时调 门和主汽门同时关闭)。粉色的是串联中间点的压力油,青色是无压回油,绿色是安全油。PS1~3是AST压力开关,PS4~PS5是中间点压力开关,这几个压力开关都是监测报警或给DCS 信号的,我们暂时不管它。其中卸荷阀1和3并联后经过节流孔A再与并联的卸荷阀2和4串联,串联后再经过节流孔B进入无压回油。原本我们不需要这么复杂,只是因为我们这个 使用场合的高可靠性要求,要不是可靠性要求,一个卸荷阀和一个节流孔就可以实现。 第二部分:要解释整个问题,首先请允许我简单介绍一下EH油泵的工作特点,EH油泵是轴 向柱塞式衡压变量泵,在这里我们只要知道它叫衡压变量泵好了,顾名思义,你调定好了 压力后它的压力是不变的,在这个压力下它能根据你系统实际需求的流量来决定它的输出 流量,但是有一个前提条件,就是这个输出流量不能大于它的最大输出流量,一旦大于这 个流量,这个压力也就不能维持。 第三部分:接下来请允许我再介绍一下图2的卸荷阀,卸荷阀分三个腔,安全油腔就是上 面的这个油口1,压力油腔就是下面的这个油口4,还有回油腔就是侧面的这个油口5。当 安全油建立起来后,安全油口的压力几乎等于压力油口的压力,而且由于安全油的作用面 积(阀芯上部面积)大于下面压力油口的作用面积(阀芯下面锥部投影面积),所以压力 油口的油是不能把阀芯打开,压力油也就不能从回油口走掉。