三自由度
0 引言
机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。三自由度机械手又称3D机械人,能够实现三个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大,灵活性好,应用广泛的特点。
可编程控制器(PLC)是一种专门为工业应用而设计的进行数字运算操作的电子控制装置。由于其具有可靠性高,功能强,编程简单,人机交互界面友好等特性而广泛用于工业控制系统。
步进电机是将电脉冲信号转变为角位移或线位移的开环执行元件。在非超载情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数目。这一线性关系的存在,加上步进电机只有周期性误差而无累计误差的特点,使其在速度、定位等控制领域应用得非常广泛。
机械手按驱动方式可分为液压式、气动式、电动式和机械式机械手。本文设计的三自由度机械手属于混合式机械手,它综合了电动式和气动式机械手的优点,既节省了行程开关和PLC的I/O端口,又达到了简便操作和精确定位的目的。
1 三自由度机械手的系统结构与运动方式
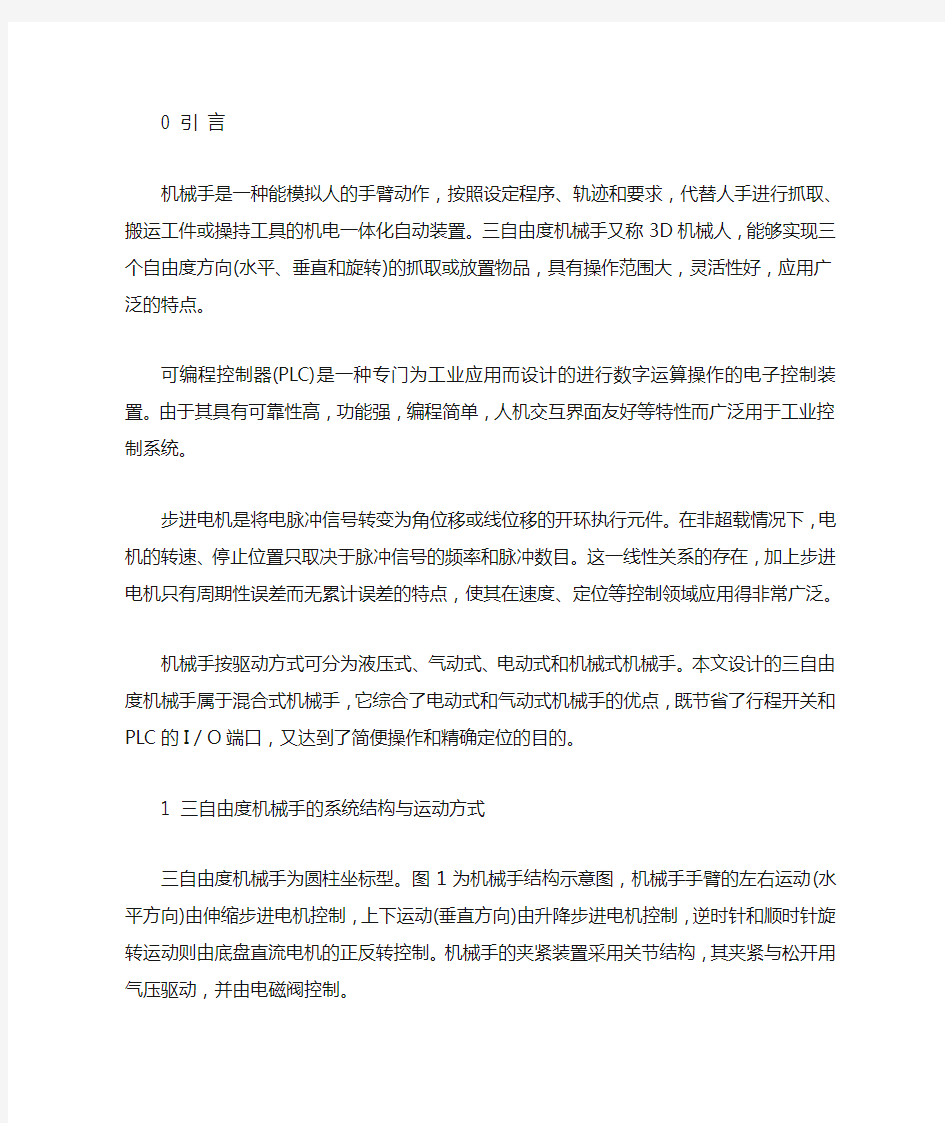
三自由度机械手为圆柱坐标型。图1为机械手结构示意图,机械手手臂的左右运动(水平方向)由伸缩步进电机控制,上下运动(垂直方向)由升降步进电机控制,逆时针和顺时针旋转运动则由底盘直流电机的正反转控制。机械手的夹紧装置采用关节结构,其夹紧与松开用气压驱动,并由电磁阀控制。
机械手可以根据设定程序的动作将工件从A处搬运到B处。SQ1,SQ2,SQ5,SQ6为水平和垂直方向上的限位开关,SQ3,SQ4为原点位置和终点位置的光接近开关。
2 三自由度机械手控制系统设计
三自由度机械手系统设置了手动工作方式和自动工作方式。自动方式又分为自动回原点、单步、单周期、连续四种工作方式。
2.1 硬件设计
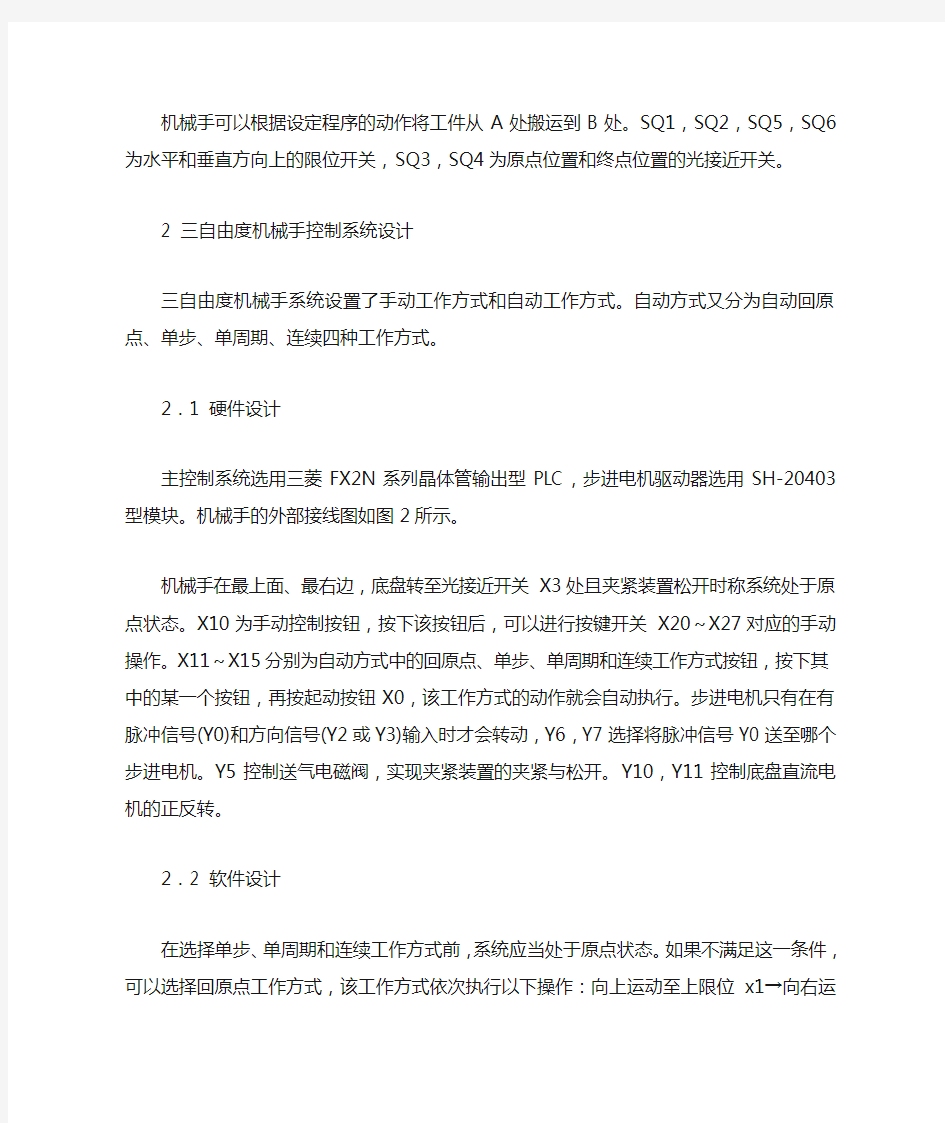
主控制系统选用三菱FX2N系列晶体管输出型PLC,步进电机驱动器选用SH-20403型模块。机械手的外部接线图如图2所示。
机械手在最上面、最右边,底盘转至光接近开关X3处且夹紧装置松开时称系统处于原点状态。X10为手动控制按钮,按下该按钮后,可以进行按键开关 X20~X27对应的手动操作。X11~X15分别为自动方式中的回原点、单步、单周期和连续工作方式按钮,按下其中的某一个按钮,再按起动按钮X0,该工作方式的动作就会自动执行。步进电机只有在有脉冲信号(Y0)和方向信号(Y2或Y3)输入时才会转动,Y6,Y7选择将脉冲信号Y0送至哪个步进电机。Y5控制送气电磁阀,实现夹紧装置的夹紧与松开。Y10,Y11控制底盘直流电机的正反转。
2.2 软件设计
在选择单步、单周期和连续工作方式前,系统应当处于原点状态。如果不满足这一条件,可以选择回原点工作方式,该工作方式依次执行以下操作:向上运动至上限位x1→向右运动至右限位X2→顺时针转动至光接近开关X3→夹紧装置松开。
机械手自动工作方式的顺序功能图如图3所示。机械手手臂的运动速度由输入步进电机的脉冲频率控制,机械手下降及左行的距离由脉冲数控制,脉冲频率和脉冲数可以根据工业现场的实际情况在程序中设定,具有可重复操作性。
本系统采用的是PLC梯形图顺序编程的方法。其中以PLSY脉冲输出指令输出脉冲,用
MOV指令设定脉冲个数,指定脉冲输出完后,指令执行完成标志 M8029置1。由于PLSY指令只能使用一次,而系统中两个步进电机均需要脉冲输入,设计中采用两个外部继电器解决了该问题。将Y0输出的脉冲同时接至两个继电器动触点,两继电器的常开触点分别与两块步进电机驱动器的脉冲输入端相连,Y6,Y7接到两继电器的控制端,这样就可以通过Y6,Y7来控制步进电机的脉冲输入。
工程振动——模态分析、多自由度系统振动响应
1.复习模态分析理论 1.1单自由度系统频响函数(幅频、相频、实频与虚频、品质因子等) 系统的脉冲响应函数h(t)与系统的频响函数H(ω)是一对傅里叶变换对,与系统的传递函数H(s)是一对拉普拉斯变换对。即有: i ()()e d t H h t t ωω-∞ =? -∞ 1i () ( )e d 2π t h t H ωωω -∞ =?-∞ ()()e d 0 st H s h t t -∞ =? 1 i () ( )e d i 2πi st h t H s σωσ+∞=? -∞ 复频率响应的实部 2 1(/)R e [()]22 2 [1(/) ](2/)n H n n ωωωωω ξωω-= -+ 复频率响应的虚部 2/Im [()]22 2 [1(/)](2/) n H n n ξωω ωωω ξωω =- -+ 单自由度系统频响函数的各种表达式及其特征1 (w )2H k m w j k η=-+,对频响函数特征的描述 采用的几种表达式 1)幅频图:幅值与频率之间的关系曲线 2)相频图:相位与频率之间的关系曲线 3)实频图:实部与频率之间的关系曲线 4)虚频图:虚部与频率之间的关系曲线 5)矢端轨迹图(Nyquist 图) 1.2单自由度结构阻尼系统频响函数的各种表达形式 频响函数的基本表达式:11111 ()22222100 H m k k m j k j j ωω ηωωηωη = = ?=? -+-+-Ω+ 频响函数的极坐标表达式:()|()|j H H e ?ωω=,w H () —幅频特性, a rc ta n 21η?? ? -= ? ? ?-Ω? —相频特性。 频响函数的直角坐标表达式: ()()() R I H H jH ωωω=+, ()() 211()222 1R H k ωη -Ω= ? -Ω+—实频特性, () 1()22 2 1I H k η ωη -=? -Ω+—虚频特性 频响函数的矢量表达式:()()()R I H H ωωω=+H i j 1.3单自由度结构阻尼系统频响函数各种表达式图形及数字特征 幅频特性:1|()|0H k ωη = 固有频率:0D ωω= 阻尼比:00 B A ω ωω ηω ω -?== 相频特性
机械毕业设计1277三自由度圆柱坐标型工业机器人设计
目录 目录 (1) 中文摘要 (2) Abstract (2) 第1章绪论......‥ (3) 第2章工业机器人的总体设计 (3) 2.1 工业机器人的组成及各部分关系概述 (3) 2.2 工业机器人的设计分析 (4) 2.2.1 设计要求 (5) 2.2.2 总体方案拟定 (5) 2.2.3 工业机器人的主要技术参数 (5) 第3章工业机器人的机械系统设计 (6) 3.1 工业机器人的运动系统分析 (6) 3.1.1 机器人的运动概述 (6) 3.1.2 机器人的运动过程分析 (7) 3.2 工业机器人的执行机构设计 (8) 3.2.1 末端执行机构设计 (8) 3.2.2 手臂机构设计 (11) 3.2.3 腰部和基座设计 (12) 3.3 工业机器人的机械传动装置设计‥ (18) 3.3.1 滚珠丝杠的选择 (18) 3.3.2 谐波齿轮的选择 (19) 3.3.3 联轴器的选择 (20) 第4章工业机器人的计算机控制系统概述 (20) 4.1 工业机器人控制系统的特点及对控制功能的基本要求‥ (21) 4.2 计算机控制系统的设计方案 (22) 4.3 硬件电路的组成 (22) 第5章工业机器人运行时应采取的安全措施 (22) 5.1 安全要求 (22) 5.2 实施方法 (23) 鸣谢 (23) 参考文献 (24)
中文摘要 在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。本设计为三自由度圆柱坐标型工业机器人,其工作方向为两个直线方向和一个旋转方向。在控制器的作用下,它执行将工件从一条流水线拿到另一条流水线这一简单的动作,本文是对整个设计工作较全面的介绍和总结。 关键词:三自由度,圆柱坐标,工业机器人 Abstract Industrially, automatic control systems are found in numerous applications, such as automation machine tool control, computer systems and robotics. Industrial robots are relatively new electromechanical devices that are beginning to change the appearance of modern industry. This scheme introduced a cylindrical robot for three degree of freedom. It is composed of two linear axes and one rotary axis current control only allows these devices move from one assembly line to other assembly line in space, perform relatively simple taskes. This paper is more comprehensive introduction and summing-up for the for the whole design work. Key words:three degrees of freedom, cylindrical, Industrial robot
三自由度圆柱坐标工业机器人
三自由度圆柱坐标型工业机器人设计 学院:机电工程学院 班级: 姓名: 学号:
1.末端执行机构设计 采用内撑连杆杠杆式夹持器,用小型液压缸驱动夹紧,它的结构形式如图。内撑连杆杠杆式夹持器采用四连杆机构传递撑紧力,即当液压缸1工作时,推动推杆2向下运动,使两钳爪3向外撑开,从而带动弹性爪4夹紧工件。该种夹持器多用于内孔薄壁零件的夹持。
2.弹性爪的结构设计: 这种结构是在手爪外侧用螺钉固定弹性片两端。当弹性手工作时,由于夹紧过程具有弹性,就可避免易损零件被抓伤、变形和破损。 3.手臂机构的设计 本设计中手臂由滚珠丝杠驱动实现上下运动,结构简单,装拆方便,还设计有两根导柱导向,以防止手臂在滚珠丝杠上转动,确保手
臂随机座一起转动。它的结构如下图。选用轴向脚架型液压缸,活塞杆末端为外螺纹结构,手臂与末端执行器连同活塞杆一起转动。 4.腰部和基座设计 1——支座,2——步进电机,3——谐波齿轮,4——转动机座5——支承槽钢梁,6——滚珠丝杠,7——导向柱,8——锥环无键联轴器 通过安装在支座上的步进电机和谐波齿轮直接驱动转动壳体转动,从而实现机器人的旋转运动;通过安装在顶部的步进电机和联轴器带动滚珠丝杠转动实现手臂的上下移动。采用双导柱导向,防止手臂在滚珠丝杠上转动,确保手臂随机座一起转动。支撑梁采用槽钢,以减轻重量和节省材料,它的结构如上图。 5.驱动方式的选择
由上表知步进电机应用于驱动工业机器人有着许多无可替代的 优点,如控制性能好,可精确定位,体积较小可用于程序复杂和运动轨迹要求严格的小型通用机械手等,所以本设计采用它来实现机器人的旋转和上下移动。选电机为BF反应式步进电机,型号为:90BF001。 由上表知,液压驱动方式反应灵敏,可实现连续轨迹控制,液体压力高,可获得较大的输出力,因此机器人的伸缩运动采用液压驱动方式来实现,从而使机器人容易找准工件。它的型号为Y-HG1-C50/28×100LJ1HL1Q,它的主要技术参数如下表
六自由度摇摆平台
大黄蜂机器人六自由度摇摆台 大黄蜂机器人有限公司的六自由度平台系统由采用Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。六自由度运动平台(如下图)的下平台安装在地面上,上 平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下: 本设备主要由以下部分组成:运动上平台、下平台(基座)、电动缸及伺服 电机、驱动器系统、综合控制及监测系统。 各自功能如下: 上平台:是有效载荷的安装基面,提供六自由度的摇摆运动。 下平台:是六自由度摇摆台的安装基面,需要承受足够大的冲击力。 电动缸及伺服电机:通过控制电动缸活塞杆的行程,实现运动平台台体的六自由度运动,共6套。 驱动器系统:接收用户控制指令,通过控制伺服电机的输入,对伺服电机的输出转速和转角进行控制,达到控制电动缸活塞杆出速度和行程的目的,共6套。 综合控制监测系统:硬件为用户计算机,软件为研制方配合开发;同时,它 还对平台的运动过程进行监测,预防和处理系统的异常情况。
平台总体运动能力指标如上表,具体表述如下: a.平台定位精度及重复定位精度为0.5mm及0.1mm; b.平台转动精度及重复转动精度为0.1°及0.05°; c.行程回差小于0.2mm; d.平台X方向运动速度可从0mm/s到250mm/s连续变化;YZ方向运动 速度可从0mm/s到250mm/s连续变化; e.单支杆可承受轴向力不小于700N; f.单支杆的运动速度可从0m/s到250mm/s连续变化; g.平台中位位置固有频率:不小于40Hz; h.机械组件需具有开放性,可拆卸组装; i.机械设计安全系数不小于 2.0,驱动裕度不小于 3.0; j.额定载荷下,全行程往复工作寿命不小于1×104次,存储寿命不小于48月;
六自由度运动平台方案设计报告
编号 密级内部阶段标记 C 会签 校对 审核 批准六自由度运动平台 方案设计 名称
内容摘要: 针对YYPT项目在原理样机出现的问题,对YYPT原理样机从结构设计、伺服系统等方面进行优化设计,以满足设计及使用要求。 主 YYPT 优化 题 词 更改单号更改日期更改人更改办法 更 改 栏
1概述 YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。 2 原理样机技术状态 2.1 原理样机方案 2.1.1 组成 原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。具体产品组成表见表2.1。 序号产品名称型号厂家数量备注 1 电动缸KH08XX(3)西安方元明 6 安装345厂电机 2 电阻尺LTS-V1-375 上海徳测 6 3 驱动器50A8 AMC 6 3 A/D卡PCI1716 研华 1 4 D/A卡PCI1723 研华 1 5 工控机610H 研华 1 6 直流电源 1 2.1.2 结构方案 六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
(完整版)六自由度机器人结构设计
六自由度机器人结构设计、 运动学分析及仿真 学科:机电一体化 姓名:袁杰 指导老师:鹿毅 答辩日期: 2012.6 摘要 近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此 研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义 的。 典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在 生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合项 目的要求,设计了一种小型的、固定在AGV 上以实现移动的六自由度串联机器人。 首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择
其中最优的方案进行了结构设计;同时进行了运动学分析,用D-H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析,作出了实际工作空间的轴剖面。这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。最后用ADAMS 软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了 经验。 第1 章绪论 1.1 我国机器人研究现状 机器人是一种能够进行编程,并在自动控制下执行某种操作或移动 作业任务的机械装置。 机器人技术综合了机械工程、电子工程、计算机技术、自动控制及 人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表,是当代科技发展最活跃的领域。机器人的研究、制造和应用正受到越来越多的国家的重视。近十几年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。 我国是从 20 世纪80 年代开始涉足机器人领域的研究和应用的。1986年,我国开展了“七五”机器人攻关计划。1987 年,我国的“863”计划将机器人方面的研究列入其中。目前,我国从事机器人的应用开发的主要是高校和有关科研院所。最初我国在机器人技术方面的主要
两自由度机械手动力学问题
两自由度机械手动力学问题 1题目 图示为两杆机械手,由上臂AB、下臂BC和手部C组成。在A处和B处安装 有伺服电动机,分别产生控制力矩M 1和M 2 。M 1 带动整个机械手运动,M 2 带动下臂 相对上臂转动。假设此两杆机械手只能在铅垂平面内运动,两臂长为l 1和l 2 , 自重忽略不计,B处的伺服电动机及减速装置的质量为m 1 ,手部C握持重物质量 为m 2 ,试建立此两自由度机械手的动力学方程。 图1 图2
2数值法求解 拉格朗日方程 此两杆机械手可以简化为一个双摆系统,改双摆系统在B 、C 出具有质量m 1,m 2,在A 、B 处有控制力矩M 1和M 2作用。考虑到控制力矩M 2的作用与杆2相对杆1的相对转角θ2有关,故取广义力矩坐标为 2211,θθ==q q 系统的动能为二质点m 1、m 2的动能之和,即 由图2所示的速度矢量关系图可知 以A 处为零势能位置,则系统的势能为 由拉格朗日函数,动势为: 广义力2211,M Q M Q == 求出拉格朗日方程中的偏导数,即
代入拉格朗日方程式,整理得: 给定条件 (1)角位移运动规律 ()231*52335.0*1163.0t t t +-=θ,()232*52335.0*1163.0t t t +-=θ 21θθ和都是从0到90°,角位移曲线为三次函数曲线。 (2)质量 m 1=4㎏ m 2=5kg (3)杆长 l 1= l 2= MATLAB 程序 t=0::3; theta1=*t.^3+*t.^2; w1=*t.^2+*t; a1=*t+; theta2=*t.^3+*t.^2; w2=*t.^2+*t; a2=*t+; m1=4; m2=5; l1=; l2=;
一种三自由度运动平台的研究及实现
华中科技大学 硕士学位论文 一种三自由度运动平台的研究及实现 姓名:罗文豹 申请学位级别:硕士 专业:轮机工程 指导教师:李维嘉 2011-01-11
华 中 科 技 大 学 硕 士 学 位 论 文 摘 要 由于三自由度运动平台可以提供驾驶模拟器所需的主要动感特效,加之驱动关节少,性价比高等优点,在驾驶模拟器中的应用愈来愈广泛。本文即根据某型驾驶模拟器运动平台的性能指标要求,对三自由度运动平台进行研究并予以实现。 首先,论文基于空间运动机构的相关理论,确定了一种带防扭臂结构的三自由度运动平台机构;然后,以平台运动范围、电动缸工作行程、平台台面尺寸等为约束条件,以平台可控性能和平台结构尺寸的加权综合最优为目标函数,采用加速遗传算法,对该平台的机构参数进行了优化,并将优化结果运用到实际平台的设计中;其次,针对运动平台的驱动控制系统设计,提出了全数字伺服控制的方案,提高了控制系统的抗干扰能力;再次,基于空间运动机构的动力学仿真,确定了驱动系统的动力匹配;最后,基于Wince6.0操作系统,开发了一套三自由度运动平台应用软件,实现了平台系统的实时控制。调试结果表明,平台系统的各项性能指标,均满足了设计要求。本文所研究并实现的三自由度运动平台系统,已投入使用,并小批量生产。 关键词:三自由度; 防扭臂; 机构优化;Wince;电动伺服控制
华 中 科 技 大 学 硕 士 学 位 论 文 Abstract The three degrees of freedom platform has been applied to the driving simulator more extensive, Since it can provide the main dynamic driving simulator effects, additionally it has less joint actuated and higher capability but lower cost. In this paper, three degrees of freedom motion platform has been studied and realized based on a certain type of driving simulator performance requirements. First, in the paper, a kind of the three DOF motion platform with anti-torque arm has been identified based on the theory of space motion agencies. Secondly, the key factors, such as the range of the platform, the stroke length of electric cylinders, the sizes of panels etc., as constraint conditions was concluded, the optimal weighed value of the controllability and the structure size of the platform as the optimal objective functions were chosen, the algorithm parameters of the platform mechanism were optimized based on acceleration genetic algorithm, and the optimization results were applied to the design of a kind of the three DOF motion platform with anti-torque arm. Thirdly, All-digital servo control scheme has been proposed for the design of the drive control system, and it has been Improved anti-jamming capability of the control system. Fourthly, The power matching for the drive control system has been determined based on the dynamic simulation of the Space motion mechanism. Finally, The internet applications have been developed ground on Wince6.0 and the process of designing the real-time control system for the platform has been carried out. The results have showed that all performances have meet the design requirements. The three-DOF motion platform system which has been Studied and implemented in this paper has been put into use, and small batch production. Key words:Three degrees of freedom;Anti-torsion arm;Mechanism optimization; Wince;Electro-mechanics servo control
单片机控制三自由度圆柱坐标机械手设计
XX大学 毕业设计(论文) 单片机控制三自由度圆柱坐标机械手设计 专业: 班级: 姓名: 学号: 指导教师: 年月
摘要 近代的工业机械手是由目标机械本体、控制器系统、传感装置系统、控制系统和伺服动力器系统组成,是一种模仿人的操作、自动化控制、可多次编程、能在立体空间完成各式各样作业的Mechatronics设备。工业机械手对于提高和确保产品质量,提升生产的效率,改善工人的工作条件和快速更新产品起着非常重要的作用。工业机械手技术结合了多们学科的知识。包含机构学、计算机、控制论、信息和传感技术、人工智能、仿生学等。它是当代十分活跃,应用非常广泛的领域。 机械手具有很多人类所不具有的能力,包括快速分析环境能力;抗干扰能力强,能长时间工作和工作精度高。可以说机械手是工业进步的产物,它也发挥了在当今工业的至关重要的作用。如今,机械手工业已成为世界各国备受关注的产业。 随着机械手技术的快速发展,工业机械手的应用范围正在不断扩大,提出了新要求,为提高机械手教学教育的水平,我们研制出一套以实验教学为目的的机械手演示系统。 本文阐述了机械手的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机械手设计要求和进行了总体方案设计和各自由度的具体结构设计、计算。 关键词:机械手;工业;传动;强度
Abstract From the industrial robot manipulator (Mechanical), controller, servo drive system and sensing device, a humanoid operation, automatic control, can repeat programming, three-dimensional space can be completed in the various operations of the electromechanical integration automatic production agency. It to stabilize, improve the product quality, improve production efficiency, plays a very important role in improving the rapid working conditions and product. Industrial robot technology is a high-tech integrated computer, control theory, mechanism, information and sensor technology, artificial intelligence, bionics multidisciplinary and form, is the contemporary research is very active, more and more widely applied in the field. The robot is on the environment of rapid response and the analysis judgment ability, and the machine can work continuously for long time, high precision, resistance to harsh environment capacity, in the sense that it is the product of the evolution of the machine, it is an important production and industrial and non-industrial sector, service equipment, automation equipment is indispensable the field of advanced manufacturing technology. Today, the robotics industry has become the world the concern of the industry. With the rapid development of robot technology, the application field of industrial robot is constantly expanding, puts forward new requirements, in order to improve the robot teaching level, we developed a set of experimental teaching for the purpose of demonstration of the robot system. This assay describes the development process of the robot, the application status at home and abroad, robot based on the specific design requirements, the overall design of the degree of freedom, the concrete structure design and calculation; Key Words: robot; industrial; transmission; strength
并联六自由度运动平台
并联六自由度运动平台 1.概述 并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。 图0-1:六自由度及其坐标系定义图 我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。 六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。 2.系统组成 2.1液压伺服类 典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。 液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。 控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。 控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。 2.2 电动伺服类 电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增 加运动控制单元。具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。 3.主要技术参数 以下参数为液压类平台典型值,具体可按用户要求设计制造。 3.1平台主要参数 平台最大负载:静态≥2000KG,动态≥3000KG。 上平台球铰分布园直径1400mm,相邻球心距离157mm; 下平台球铰分布园直径1600mm,相邻球心距离167mm; 伺服缸最小球铰球心距离800mm,最大长度1200mm;(采用Φ63/45~400缸体)。 平台初始高度约700mm。 3.2 泵站技术指标 额定流量:90L/min 最大系统压力:12Mpa; 泵站电机功率:22KW; 空间尺寸:1400×1200×1320 3.3 运动参数 伺服缸运动速度≥200mm/S;有效行程≥400mm。 主要运动参数如下表:
三自由度机械手的结构设计论文
三自由度机械手的结构设计 摘要 本文简要介绍了机械手的概念,机械手的组成和分类,国内外的发展状况及发展前景。 本文对机械手进行总体方案设计,结合生产实际及理论确定了机械手的结构及动作过程,坐标型式和自由度数,并列出了机械手的技术参数。 设计出了机械手的驱动方案、控制方案,在进行控制方案的选取时进行了不同方案的优缺点的对比,最后确定了具体的控制方案。在进行机械手控制器件的选取时,对控制器件选择进行了详细的分析,如对步进电机参数的具体选取。最后介绍了利用可编程序控制器对机械手进行控制,同时叙述了可编程序控制器选取原则及工作过程,并绘制出了可编程序控制器外部接线图。在用可编程序控制器控制时分为手动和自动两种工作方式,并绘制了自动工作方式的顺序功能图。 关键词机械手的概念,机械手控制器件,可编程序控制器(PLC) ThREE DEGREES OF FREEDOM MANIPULATOR DESIGN ABSTRACT
目录 中文摘要 (1) 英文摘要 (2) 一、引言 1.1简要介绍机械手的概念 (4) 1.2机械手的组成和分类 (5) 1.2.1机械手的组成 (5) 1.2.2机械手的分类 (5) 1.3国内外发展状况 (6) 二、三轴自由度机械手的结构及动作过程 (7) 2.1机械手的结构 (7) 2.2机械手的动作过程 (8) 2.3机械手的驱动方案设计 (9) 2.4机械手的控制方案设计 (9) 2.5机械手的座标型式与自由度 (10) 2.6机械手的技术参数列表 (11) 三、控制器件选型 (11) 3.1步进电机及其驱动器选择 (11) 3.2直流电机及其驱动器选择 (12) 3.3旋转编码器的选择 (14) 四、机械手的PLC控制设计 (15) 5.1可编程序控制器的选择 (15) 5.2可编程序控制器的工作过程 (16) 总结 (19) 致谢 (20) 参考文献 (20) 附录 (21)
三自由度运动平台的装配方法与制作流程
图片简介: 本技术创造公开的三自由度运动平台的装配方法,包括顺序安装固定平台(1),安装定万向铰节器(4),安装伺服电动缸,安装动万向铰节器(11),安装控制箱(18),安装防转机构,安装连接电缆,安装电缆保护盖(3),调整伺服电动缸达到初始化长度,安装运动平台(12)以及连接防转机构的步骤;控制箱可以在伺服电动缸及动万向铰节器(9)或定万向铰节器(4)装配前后进行,甚至在防转机构(11)安装步骤后进行,安装防转机构的步骤应先于安装运动平台步骤前执行;通过各步骤关键点的保证实现三自由度运动平台装配结果的一致性和精确度。 技术要求 1.一种三自由度运动平台的装配方法,其特征是:包括以下步骤: 1)、安装固定平台(1),使用吊装设备同时吊挂固定平台的吊挂点(26),对正固定平台的螺栓孔(27)与平整后安装基面上的固定螺栓,使用紧固件将固定螺栓所在安装基面与固定平台(1)底面紧贴在一起为固定平台(1)提供稳定的固定基础;
2)、安装定万向铰节器(4),将定万向铰节器(5)的固定端放置在固定平台(1)的定万向铰节器支撑座(2)上,对正定万向铰节器(4)的固定端固定孔与定万向铰节器支撑座(2)上的螺纹孔,使用紧固件均匀压紧; 3)、安装伺服电动缸(15、6、13),吊住伺服电动缸的两端,对正伺服电动缸的减速器端的螺纹孔与定万向铰节器(4)的活动端的固定孔,使用紧固件均匀压紧; 4)、安装动万向铰节器(9),对正动万向铰节器(9)的螺柱(8)与伺服电动缸的导杆(7)螺纹孔,螺柱完全旋入导杆(7)螺纹孔后,反向旋出45-90°为动万向铰节器相对运动预留一定的空间; 5)、安装控制箱(21),将控制箱(21)无固定耳的一面正对固定平台中间位置的防转架(28)开口并缓慢平稳推入防转架(28)内,直至控制箱的固定耳(20)与防转架(28)的支撑立柱紧贴;使用紧固件紧固控制箱的固定耳(20)与防转架(28)限定住控制箱的位置; 6)、安装防转机构(11),将防转机构(11)未装配万向铰节器的一端(17)正对着防转架(28)顶部的防转固定盘(17),调整防转机构(11)使其三个活动臂(14)分别朝向相邻的两台伺服电动缸(15、6、13)的中间位置,对正防转机构(11)的固定孔与防转固定盘(17)的螺纹孔,使用紧固件均匀压紧紧固使防转机构(11)与防转架(28)连接; 7)、安装连接电缆,将伺服电动缸(15、6、13)与控制箱(21)上的伺服电机连接插头(23、24、25)依次对应编号,连接电缆两端分别连接对应编号的伺服电动缸(15、6、13)与控制箱上的伺服电机连接插头(23、24、25),锁紧连接插头;编号需对应匹配于控制箱中伺服驱动器的站号; 8)、安装电缆保护盖(3),将电缆保护盖开口面朝向固定平台(1),围绕固定平台边沿拼接成一圈,各个伺服电动缸(15、6、13)的连接电缆从最近的出线口出线,其余设置于电缆保护盖内;使用紧固件连接电缆保护盖(3)与固定平台(1); 9)、调整伺服电动缸(15、6、13)达到初始化长度,向控制箱(21)供电,启动控制系统,分别测量各个伺服电动缸(15、6、13)的导杆(7)伸出长度,记录各个伺服电动缸(15、6、13)到达初始化长度所使用伺服电机的编码器读值,写入到控制系统中,作为基准参数;
四自由度圆柱坐标机器人机械手臂设计
四自由度圆柱坐标型工业机器人机械设计 摘要 在现代制造业中,工业机器人已成为不可或缺的核心自动化装备。工业机器人适应工作环境能力强,可担任各种类型各种强度的生产工作,精度高、速度快、易于控制,可显著提高生产的工业自动化水平。国工业机器人起步晚,市场占有率低,许多核心技术还没有掌握,可靠性低,应用围小,零部件互换性低。 现设计一种四自由度的圆柱坐标型机器人,能实现工件的上下搬运。该四自由度机器人由两个旋转自由度机构和两个平移自由度机构组成,根据机器人运动参数,选择足够功率的伺服电机,然后,估算驱使机构各自由度运动需要的力及扭矩,选择传动比合适且大小合适的减速器。通过伺服电机减速器驱动机构的运动,实现机器人腰部旋转,手臂的竖直升降,手臂的水平移动和末端操纵器的旋转。在机器人辅助系统的设计部分,还考虑了伺服电机导线坦克链的排布,机构零点位置的触发开关及其导线排布的设计。 关键词:四自由度,圆柱坐标,工业机器人,机械设计
Mechanical Design of a 4-DOF Cylindrical Industrial Robot Abstract In modern manufacturing, industrial robot has become an indispensable core automation equipment. Industrial robot has good adaptability, can adapt to all kinds of mass production, high precision, fast speed, easy to control, can significantly improve the automation level of production. Domestic industrial robots started late, has low market share, low reliability, and many core technologies have not yet mastered. The application scope is small, the interchangeability of parts is low. The design of a kind of four degree of freedom cylindrical coordinate robot, can realize the workpiece moving up and down. The four degree of freedom robot mechanism is composed of two rotational degrees of freedom and two translational degrees of freedom mechanism. According to the robot movement parameters, servo motor is selected, and then estimates the sufficient power, force and torque of each degree of freedom movement needs, choose the appropriate transmission ratio and suitable reducer. Drive mechanism motion through the servo motor reducer, and then we can realize the robot waist rotation, vertical lifting arm, arm movement and rotation of the end effector. In part of the design of robot auxiliary
二自由度机械臂动力学分析
平面二自由度机械臂动力学分析 姓名:黄辉龙 专业年级:13级机电 单位:汕头大学 摘要:机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过分析,得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 关键字:平面二自由度 动力学方程 拉格朗日方程 相关介绍 机器人动力学的研究有牛顿-欧拉(Newton-Euler )法、拉格朗日(Langrange)法、高斯(Gauss )法等,但一般在构建机器人动力学方程中,多采用牛顿-欧拉法及拉格朗日法。 欧拉方程又称牛顿-欧拉方程,应用欧拉方程建立机器人机构的动力学方程是指研究构件质心的运动使用牛顿方程,研究相对于构件质心的转动使用欧拉方程,欧拉方程表征了力、力矩、惯性张量和加速度之间的关系。 在机器人的动力学研究中,主要应用拉格朗日方程建立机器人的动力学方程,这类方程可直接表示为系统控制输入的函数,若采用齐次坐标,递推的拉格朗日方程也可以建立比较方便且有效的动力学方程。 在求解机器人动力学方程过程中,其问题有两类: 1)给出已知轨迹点上? ??θθθ、及、 ,即机器人关节位置、速度和加速度,求相应的关节力矩矢量τ。这对实现机器人动态控制是相当有用的。 2)已知关节驱动力矩,求机器人系统相应各瞬时的运动。也就是说,给出关节力矩矢量τ,求机器人所产生的运动? ??θθθ、及、 。这对模拟机器人的运动是非常有用的。 平面二自由度机械臂动力学方程分析及推导过程 1、机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: 1) 选取坐标系,选定完全而且独立的广义关节变量n r ,,2,1,r ???=θ。 2) 选定相应关节上的广义力r F :当r θ是位移变量时,r F 为力;当r θ是角度变量时,r F 为力矩。 3)求出机器人各构件的动能和势能,构造拉格朗日函数。 4) 代入拉格朗日方程求得机器人系统的动力学方程。 2、下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
三自由度磁力驱动平台的实验研究
第8期2017年8月组合机床与自动化加工技术 Modular Machine Tool &Automatic Manufacturing Technique No.8Aug.2017 文章编号:1001-2265(2017)08-0055-04一一一一DOI:10.13462/https://www.360docs.net/doc/ed12052545.html,ki.mmtamt.2017.08.014 收稿日期:2016-08-15;修回日期:2016-10-26 一?基金项目:国家自然科学基金(51105257,51310105025) 作者简介:孙凤(1978 ),男,满族,辽宁阜新人,沈阳工业大学副教授,博士,研究方向为磁悬浮技术与数控技术,(E -mail)sunfeng@https://www.360docs.net/doc/ed12052545.html,三 三自由度磁力驱动平台的实验研究? 孙一凤1,吴利平1,李一东2,李一强1,佟一玲1,金嘉琦1,张一明3 (1.沈阳工业大学机械工程学院,沈阳一110870;2.中国华录松下电子信息有限公司,辽宁大连一116023;3.东北大学机械工程与自动化学院,沈阳一110819) 摘要:文章介绍了一种永磁弹簧自复位的三自由度磁力驱动平台,该平台由3对差动电磁铁组和永磁弹簧自复位结构组成三3对电磁铁组分别为X 方向的两对电磁铁组和Y 方向的一对电磁铁组,可以实现X 二Y 方向的平动和C 轴的转动;永磁弹簧自复位结构由3对均布的永磁体组构成三建立三自由度磁力驱动平台的动力学模型,搭建控制器,并利用dSPACE1104系统为核心控制器进行X 二Y 平动方向和C 轴转动的驱动实验三分析对比了阶跃输入时,X 二Y 方向平动和C 轴转动的响应结果,分析了实验平台的结构对实验结果的影响,实现了三自由度磁力驱动平台的稳定驱动,结果说明该驱动平台响应特性较好三 关键词:电磁驱动;PD 控制;数学模型;差动控制中图分类号:TH122;TG65一一一文献标识码:A Experiment Study on 3-DOF Magnetic Driving Platform SUN Feng 1,WU Li-ping 1,LI Dong 2,LI Qiang 1,TONG Ling 1,JIN Jia-qi 1,ZHANG Ming 3 (1.School of Mechamical Engineering,Shenyang Unniversity of Technology,Shenyang 110870,China;2.China Hualu 四Panasonic Avc Networks Co.,Ltd.,Dalian Liaoning 116023,China) Abstract :This paper introduces a 3-DOF magnetic driving platform with self-centering permanent magnetic springs.This platform is composed of three differential electromagnet groups and the self-centering perma-nent magnetic springs.Three pairs of electromagnet groups realize the translation in X ,Y direction and the rotation with C -axis;the self-centering permanent magnetic springs consist of three pairs of uniform permanent magnets.3-DOF dynamic model of magnetic driving platform and control system are established and the dSPACE1104system is used as the core controller.Finally,the driving experiments were carried out with the experimental prototype in X ,Y translational directions and the rotational direction with C -axis.The results in-dicate that the experiment has achieved a stable driving control with the 3-DOF magnetic driving platform.Key words :electromagnetic drive ;PD control ;mathematical model ;differential control 0一引言 传统的运动平台,各部件之间存在运动摩擦副,定位精度低,响应速度慢[1]三电磁悬浮驱动技术是利用电磁力作为驱动力的无接触驱动技术,其特点是中间传动环节少,结构简单,不产生机械接触摩擦,无灰尘,无需润滑,易于实现紧凑型的多自由度驱动等优势,可在一定程度上弥补传统驱动技术的不足[2-5]三 由于电磁驱动技术具有以上特点,国内外的研究机构对其进行了广泛关注,并取得了许多研究成果三其中麻省理工学院的学者们制造的世界第一台高精度六自由度磁悬浮平面电机[6],其采用Halbach 永磁体阵列的方式,定子线圈即产生水平驱动力,同时产生悬浮力,定位精度达到了5nm三韩国忠州大学的学者设计磁悬浮定位平台[7]采用两个部件分别实现悬浮和驱动,这种结构系统控制较为简单,但线性度不好三长春 光机电所的学者设计的二维磁悬浮工作台[8]通过层叠式的结构来间接定位,可以实现平面XY 运动三中南大学的学者构建了一种新型磁悬浮运动平台[9]进而实现了大行程二高精密电磁驱动三 本文介绍了三自由度电磁驱动平台的结构,采用3对差动电磁铁实现了X 二Y 方向平动以及C 轴的转动,利用3对均布的永磁体构成永磁弹簧,实现自复位,并且使驱动平台的结构更为紧凑三对三自由度磁力驱动平台进行数学建模,并利用dSPACE1104系统为核心控制器进行实验分析,对该驱动器的响应特性进行了实验研究,以期在微动平台的实际工程应用中提供重要的参考三 1一驱动器结构及工作原理 三自由度磁力驱动平台结构如图1所示[10]三该装置由电磁铁,上顶盖,下底盖,环形永磁体,柱形永磁 万方数据