转动惯量实验报告-理论力学
理论力学转动惯量
实验报告
实验小组成员:1453352 郭佳林 1453422 贺春森 1453442 刘美岑 1450051 万丽娟 1453208 王玮
实验时间:2015年5月24日13:30——15:30
实验地点:同济大学四平路校区力学实验中心
【实验概述】
转动惯量是描述刚体转动中惯性大小的物理量,它与刚体的质量分布及转轴位置有关。正确测定物体的转动惯量,对于了解物体转动规律,机械设计制造有着非常重要的意义。然而在实际工作中,大多数物体的几何形状都是不规则的,难以直接用理论公式算出其转动惯量,只能借助于实验的方法来实现。因此,在工程技术中,用实验的方法来测定物体的转动惯量就有着十分重要的意义。IM-2 刚体转动惯量实验仪,应用霍尔开关传感器结合计数计时多功能毫秒仪自动记录刚体在一定转矩作用下,转过π角位移的时刻,测定刚体转动时的角加速度和刚体的转动惯量。因此本实验提供了一种测量刚体转动惯量的新方法,实验思路新颖、科学,测量数据精确,仪器结构合理,维护简单方便,是开展研究型实验教学的新仪器。
【实验目的】
1.了解多功能计数,计时毫秒仪实时测量(时间)的基本方法。
2.用刚体转动法测定物体的转动惯量。
3.验证转动的平行轴定理。
4.验证刚体定轴转动惯量与外力矩无关。
【实验原理】
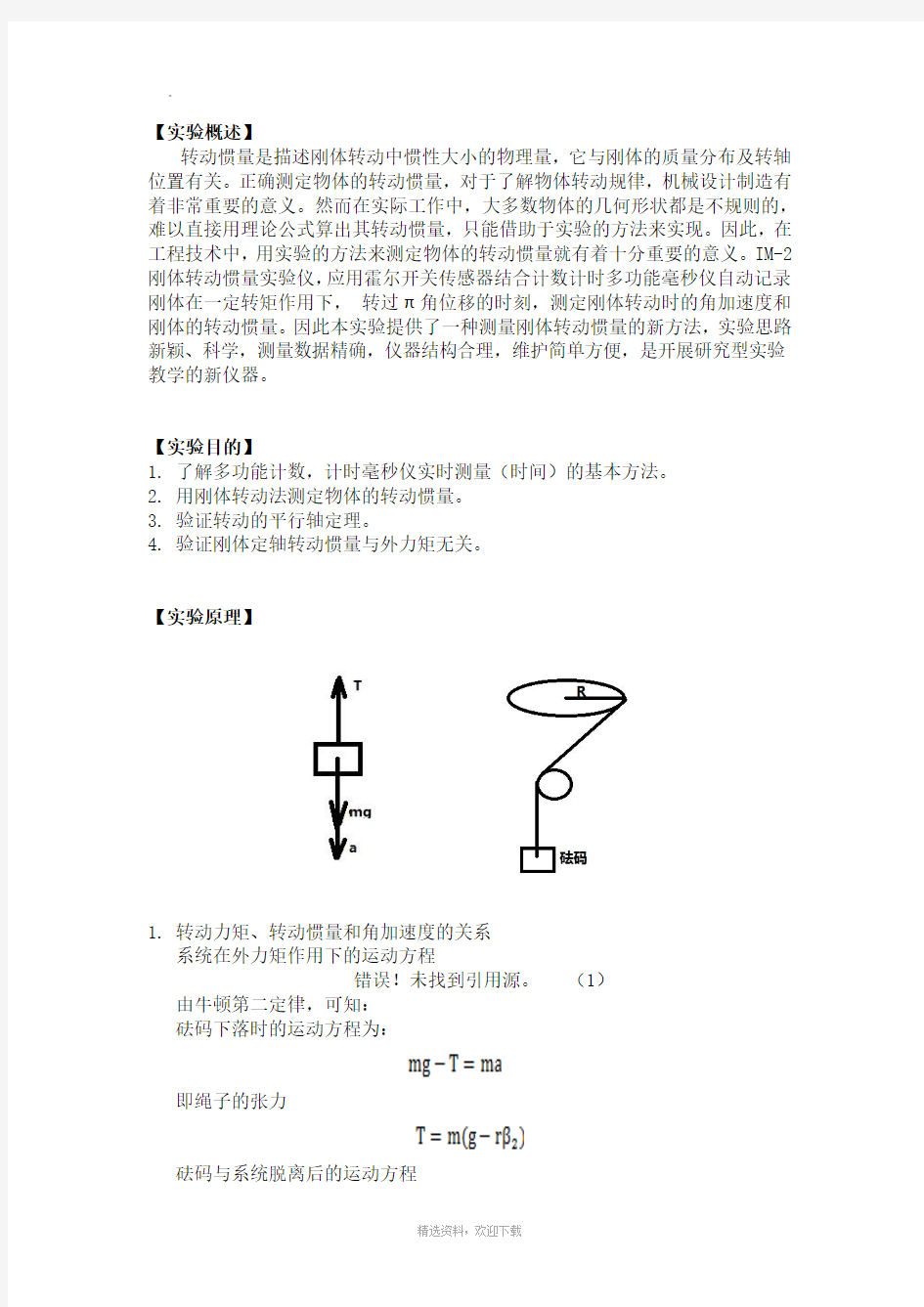
1.转动力矩、转动惯量和角加速度的关系
系统在外力矩作用下的运动方程
错误!未找到引用源。(1)
由牛顿第二定律,可知:
砝码下落时的运动方程为:
即绳子的张力
砝码与系统脱离后的运动方程
(2)
由方程(1)和(2)可得:
(3)
2.角速度的测量
错误!未找到引用源。(4)
若在t
1、t
2
时刻测得角位移θ
1
、θ
2
,则
(5)
(6)
所以,由方程(5)和(6),可得:
3.转动惯量J的理论公式
1)设圆形试件,质量均匀分布,总质量为M,其对中心轴的转动惯量为J,
外径为D
1,,内径为D
2
,则
2)平行轴定理:
设转动体系的转动惯量为J
0,当有M
1
的部分质量原理转轴平行移动
d的距离后,则体系的转动惯量为:
【实验器材】
1.实验仪器
IM-2刚体转动惯量实验仪(含霍尔开关传感器、计数计时多功能毫秒仪、一根细绳、一个质量为100g的砝码等,塔轮直径从下至上分别为30mm、40mm、50mm、60mm,载物台上的孔中心与圆盘中心的距离分别为40mm、80mm、120mm)(如下图)
2.实验样品
1)一个钢质圆环(内径为175mm,外径为215mm,质量为933g)
2)两个钢质圆柱(直径为38mm,质量为400g)
【实验步骤】
1.实验准备
在桌面上放置IM-2转动惯量实验仪,并利用基座上的三颗调平螺钉,将仪器调平。将滑轮支架固定在实验台面边缘,调整滑轮高度及方位,使滑轮槽与选取的绕线塔轮槽等高,且其方位相互垂直。
通用电脑计时器上光电门的开关应接通,另一路断开作备用。当用于本实验时,建议设置1个光电脉冲记数1次,1次测量记录大约20组数。
2.测量并计算实验台的转动惯量
1)放置仪器,滑轮置于实验台外3-4cm处,调节仪器水平。设置毫秒仪计数次
数。
2)连接传感器与计数计时毫秒仪,调节霍尔开关与磁钢间距为0.4-0.6cm,转
离磁钢,复位毫秒仪,转动到磁钢与霍尔开关相对时,毫秒仪低电平指示灯亮,开始计时和计数。
3)将质量为m=100g的砝码的一端打结,沿塔轮上开的细缝塞入,并整齐地绕
于半径为r的塔轮。
4)调节滑轮的方向和高度,使挂线与绕线塔轮相切,挂线与绕线轮的中间呈水
平。
5)释放砝码,砝码在重力作用下带动转动体系做加速度转动。
6)计数计时毫秒仪自动记录系统从0π开始作1π,2π……角位移相对应的时刻。
3.测量并计算实验台放上试样后的转动惯量
将待测试样放上载物台并使试样几何中心轴与转动轴中心重合,按与测量空实验台转动惯量同样的方法可分别测量砝码作用下的角加速度β
2
与砝
码脱离后的角加速度β
1
,由(3)式可计算实验台放上试样后的转动惯量J,再减去实验步骤2中算得的空实验台转动惯量即可得到所测试样的转动惯量。将该测量值与理论值比较,计算测量值的相对误差。
4.验证平行轴定理
将两圆柱体对称插入载物台上与中心距离为d的圆孔中,测量并计算两圆柱体在此位置的转动惯量,将测量值与理论计算值比较,计算测量值的相对误差。
5.验证刚体定轴转动惯量与外力矩无关
通过改变塔轮直径对转盘施加不同的外力矩,测定在不同外力矩下转盘的转动惯量,与理论值进行比较,在一定允许的误差范围内验证结论。
【注意事项】
1.正确连接霍尔开关传感器组件和毫秒仪,红线接+5接线柱,黑线接GND接线
柱,黄线接INPUT接线柱。
2.霍尔传感器放置于合适的位置,当系统转过约π/2角位移后,毫秒仪开始计
时计数。
3.挂线长度以挂线脱离绕线塔轮后,砝码离地3厘米左右为宜。
4.实验中,在砝码挂线脱离绕线塔轮前转动体系作正加速度β
2
,在砝码挂线脱
离塔轮后转动体系作负加速度β
1,须分清正加速度β
2
,到负加速度β1 的计
时分界时刻。
5.数据处理时,系统作负加速度β
1
的开始时刻,可以选为分界处的下一时刻,角位移时间须减去该时刻。
6.实验中,砝码置于相同的高度后释放,以利数据一致。
【数据记录与数据处理】1.测量空盘的转动惯量
d
塔轮=40mm m
砝码
=100g
2.测量空盘加圆环的转动惯量
d
塔轮=40mm m
砝码
=100g m
圆环
=933g d
环外
=215mm d
环内
=175mm
圆环的转动惯量J
环=J
盘+环
-J
盘
=0.02806-0.01744=0.01062g·m2
圆环转动惯量的理论值为J 环理=0.5m 环(r 内2+r 外2)=0.008963kg ·m 2 误差百分比=|J 环-J 环理|/J 环理×100%=18.5%
3. 验证平行轴定律
1) 圆柱距盘心距离d 1=40mm
d 塔轮=40mm m 砝码=100g m 圆柱=400g
圆柱(近)的转动惯量J 近柱=J 盘+近柱-J 盘=0.01815-0.01744=0.000780kg ·m 2 圆柱(近)转动惯量的理论值为J 近柱理=0.5m 圆柱r 圆柱2+m 圆柱d 12=0.000712kg ·m 2 误差百分比=|J 近柱-J 近柱理|/J 近柱理×100%=9.6%
2) 圆柱距盘心距离d 2=80mm
d 塔轮=40mm m 砝码=100g m 圆柱=400g
圆柱(中)的转动惯量J
中柱=J
盘+中柱
-J
盘
=0.02076-0.01744=0.00332kg·m2
圆柱(中)转动惯量的理论值为J
中柱理=0.5m
圆柱
r
圆柱
2+m
圆柱
d
2
2=0.00263kg·m2
误差百分比=|J
中柱-J
中柱理
|/J
中柱理
×100%=26.2%
3)圆柱距盘心距离d
3
=120mm
d
塔轮=40mm m
砝码
=100g m
圆柱
=400g
圆柱(远)的转动惯量J
远柱=J
盘+远柱
-J
盘
=0.02557-0.01744=0.00813kg·m2
圆柱(远)转动惯量的理论值为J
远柱理=0.5m
圆柱
r
圆柱
2+m
圆柱
d
3
2=0.005832kg·m2
误差百分比=|J
远柱-J
远柱理
|/J
远柱理
×100%=39.2%