电流调节器设计举例
双闭环直流调速系统设计举例
例题2-1:某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下:
直流电动机:220V、136A、1460r/min,Ce=0.132V﹒min/r,允许过载倍数λ=1.5。
晶闸管装置放大系数Ks =40。
电枢回路总电阻R=0.5
时间常数
电流反馈系数β=0.062V/A(β≈10V/1.5I
)
N
试按工程方法设计电流调节器,设计要求如下
要求稳态指标:电流无静差;
动态指标:电流超调量<5%。
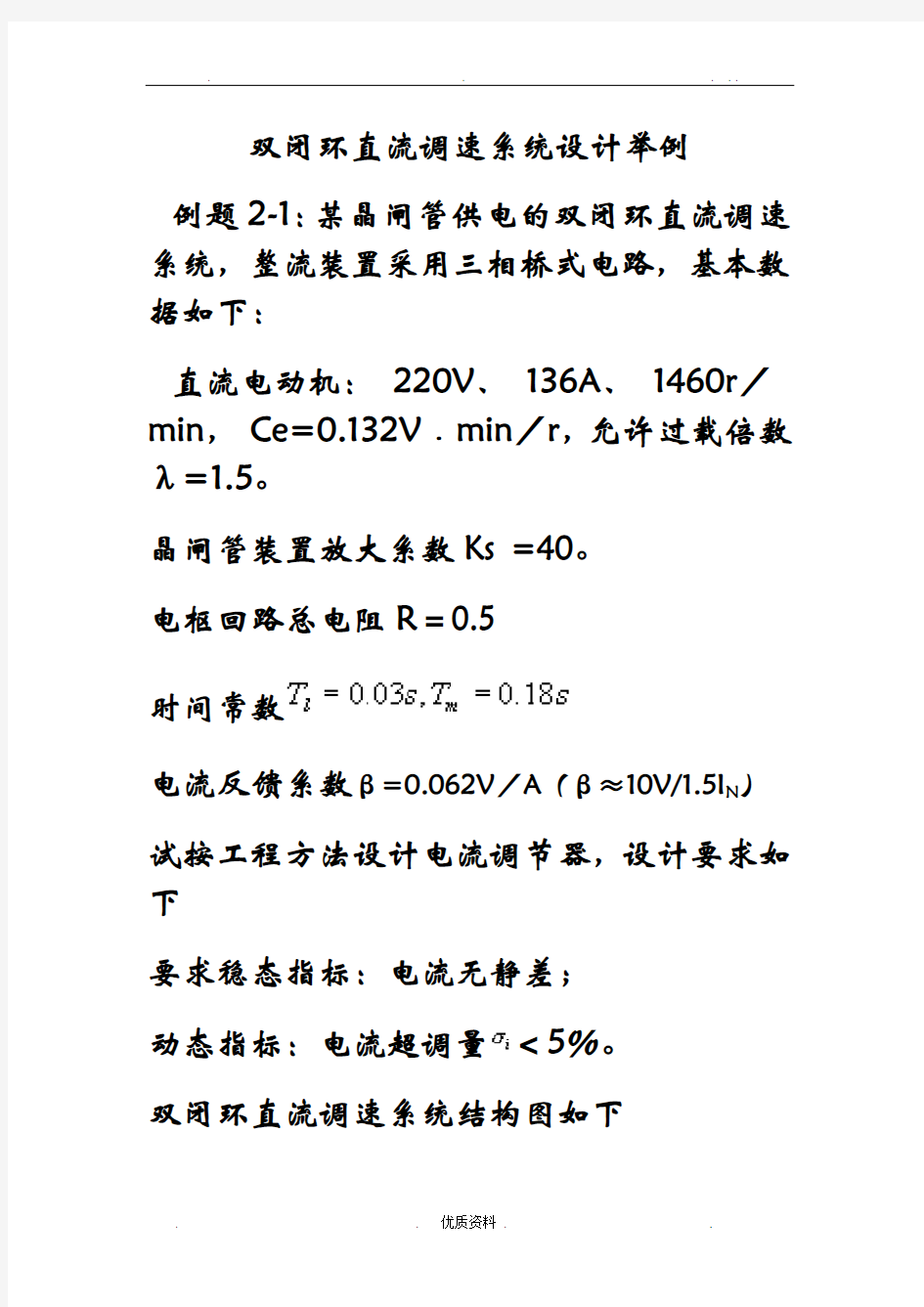
双闭环直流调速系统结构图如下
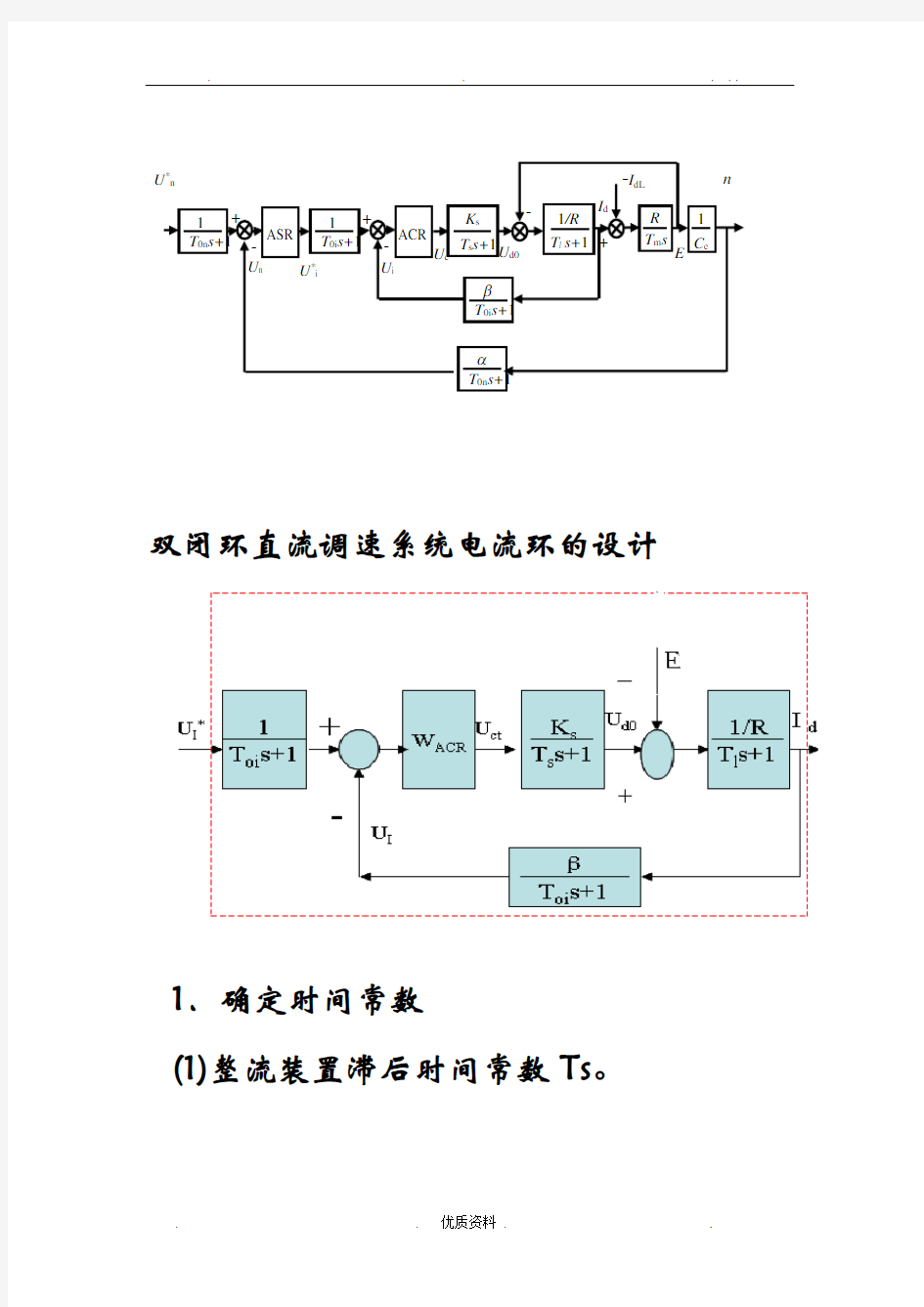
双闭环直流调速系统电流环的设计
1.确定时间常数
(1)整流装置滞后时间常数Ts 。
-I dL U d0 U n + - - + - U i ACR 1/R T l s+1 R T m s U *i U c
K s T s s+1 I d 1 C e + E β
T 0i s+1 1 T 0i
s+1 ASR 1 T 0n s+1 α
T 0n s+1 U *n
n
三相桥式电路的平均失控时间
T s=0.0017s。
(2)电流滤波时间常数
三相桥式电路每个波头的时间是3.33ms,为了基本滤平波头,应有(l~2)
=3.33ms,
因此取=2ms=0.002s。
(3)电流环小时间常数;按小时间常数近似处理,取=0.0037s。2.选择电流调节器结构
根据设计要求:5%,而且
因此可按典型1型系统设计。电流调节器选用PI型,其传递函数为
3.选择电流调节器参数
ACR超前时间常数:== 0.03s。电流环开环增益:要求5%时,应取=0.5因此
于是,ACR的比例系数为
4.校验近似条件
电流环截止频率s-1(1)晶闸管装置传递函数近似条件
﹤
现在=s-1>
满足近似条件
(2)忽略反电动势对电流环影响的条件:
;
现在,=
满足近似条件。
(3)小时间常数近似处理条件:
=
满足近似条件。
5. 计算调节器电阻和电容
取R。=40,各电阻和电容值计算如下
,取32
, 取0.75
=0.2 取0.2
按照上述参数,电流环可以达到的动态指标为:σi%=4.3%<5%,满足设计要求。
双闭环V-M调速系统中主电路,电流调节器及转速调节器的设计
中北大学 电力拖动自动控制系统课程设计说明书 学生姓名:学号: 学院:信息与通信工程学院 专业:自动化 题目:双闭环V-M调速系统中主电路, 电流调节器及转速调节器的设计 指导教师: 2011年8月25日
中北大学 电力拖动自动控制系统课程设计任务书 11/12 学年第一学期 学院:信息与通信工程学院 专业:自动化 学生姓名:学号: 课程设计题目:双闭环V-M调速系统中主电路, 电流调节器及转速调节器的设计 起迄日期:8月22 日~8月26日 课程设计地点:中北大学 指导教师: 下达任务书日期: 2011年08月22日 课程设计任务书
一、 设计题目: 双闭环V-M 调速系统中主电路,电流调节器及转速调节器的设计。 二、 已知条件及控制对象的基本参数: (1)已知电动机参数为:nom p =3kW ,nom U =220V ,nom I =17.5A ,nom n =1500r/min ,电枢绕组电阻a R =1.25Ω,2GD =3.532N m 。采用 三相全控桥式电路,整流装置内阻rec R =1.3Ω。平波电抗器电阻L R =0.3Ω。整流回路总电感L=200mH 。 (2)这里暂不考虑稳定性问题,设ASR 和ACR 均采用PI 调 节器,ASR 限幅输出im U * =-8V ,ACR 限幅输出ctm U =8V ,最大给定nm U *=10V ,调速范围D=20,静差率s=10%,堵转电流 dbl I =2.1 nom I ,临界截止电流 dcr I =2nom I 。 (3)设计指标:电流超调量δi %≤5%,空载起动到额定转速时的转速超调量δn ≤10%, 空载起动到额定转速的过渡过程时间 t s ≤0.5。 三、 设计要求 (1)用工程设计方法和[西门子调节器最佳整定法]* 进行设计,决定ASR 和ACR 结构并选择参数。 (2)对上述两种设计方法进行分析比较。 (3)设计过程中应画出双闭环调速系统的电路原理图及动态结构图
锁相环电路设计
锁相环的原理 2007-01-23 00:24 1.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的 输入信号与部的振荡信号同步,利用锁相环 路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成u D(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压u C(t),对振荡器输出信号的频率实施控制。 2.锁相环的工作原理 锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为: (8-4-1) (8-4-2) 式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。则模拟乘法器的输出电压u D为: 用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压u C (t)。即u C(t)为: (8-4-3) 式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为:
同步时序电路的设计步骤
同步时序电路的设计步骤 同步时序电路的设计步骤 同步时序电路的分析是根据给定的时序逻辑电路,求出能反映该电路功能的状态图。状态图清楚地表明了电路在不同的输入、输出原状态时,在时钟作用下次态状态的变化情况。同步时序电路的设计的设计是分析的反过程,其是根据给定的状态图或通过对设计要求的分析得到的状态图,设计出同步时序电路的过程。 这里主要讨论给定状态图的情况下的同步时序电路的设计,对于具体的要求得到状态图的过程一般是一个较复杂的问题,这是暂不讲。根据已知状态图设计同步时序电路的过程一般分为以下几步: 1.确定触发器的个数。首先根据状态的个数来确定所需要触发器的个数,如给定的状态个数为n,由应满足 n≤2K,K为实现这来状态所需要的触发器的个数。(实际使用时可能给定的状态中存在冗余项,这时一般还须对状态进行化简。) 2.列出状态转移真值表。根据状态列出状态转移真值表,也称状态表、状态转移表。 3.触发器选型。选择合适的触发器,通常可选的触发器有:JK-FF,D-FF,T-FF,一般使用较广的为JK-FF。根据状态图和给出的触发器的型号写出其输入方程,通常在写输入方程时须对其进行化简,以使电路更简单。 4.求出输出方程。根据状态表,求出输出逻辑函数Z的输出方程,还过有些电路没有独立的输出,这一步就省了。 5.画出逻辑图。根据输入方程、输出方程画出逻辑电路图。 6.讨论设计的电路能否自启动。在设计的电路中可能出现一些无关的状态,这些状态能否经过若干个时钟脉冲后进行有效的状态。 同步时序电路设计举例 例按下图状态图设计同步时序电路。 1.根据状态数确定触发器的数目:由状态图可以看出,其每个状态由两个状态,故可用两个触发器。其变量可 用Q 1,Q 表示; 2.根据状态图列出状态表:状态表的自变量为输入变量x和触发器当前状态Q 1 n,Q n,而应变量为触发器的次态 Q 1n+1Q n+1、及输出z,列表时将自变量的所有组合全部列出来,其中当Q 1 n Q n=01的状态为不出现,其输出可看作任意 项处理。
电流调节器设计举例
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电得双闭环直流调速系统,整流装置采用三相桥式电路,基本 数据如下: 直流电动机: 220V、136A、 1460r /min, Ce=0、132V﹒min/r,允许过载倍数λ=1、5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0、5 时间常数 电流反馈系数β=0、062V/A(β≈10V/1.5I N) 试按工程方法设计电流调节器,设计要求如下 要求稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统结构图如下
双闭环直流调速系统电流环得设计 1.确定时间常数 (1)整流装置滞后时间常数Ts 。 -I dL U d0 U n + - - + - U i ACR 1/R T l s+1 R T m s U *i U c K s T s s+1 I d 1 C e + E β T 0i s+1 1 T 0i s+1 ASR 1 T 0n s+1 α T 0n s+1 U *n n
三相桥式电路得平均失控时间Ts=0、0017s。 (2)电流滤波时间常数 三相桥式电路每个波头得时间就是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因此取=2ms=0、002s。 (3)电流环小时间常数;按小时间常数近似处理,取=0、0037s。 2.选择电流调节器结构 根据设计要求:5%,而且 因此可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选择电流调节器参数 ACR超前时间常数:== 0、03s。 电流环开环增益:要求5%时,应取
=0、5因此 于就是,ACR得比例系数为 4.校验近似条件 电流环截止频率s-1 (1)晶闸管装置传递函数近似条件 ﹤ 现在 = s-1> 满足近似条件 (2)忽略反电动势对电流环影响得条件:; 现在, = 满足近似条件。 (3)小时间常数近似处理条件: =
锁相环应用电路仿真
高频电子线路实训报告锁相环路仿真设计 专业 学生姓名 学号 2015 年 6 月24日
锁相环应用电路仿真 锁相环是一种自动相位控制系统,广泛应用于通信、雷达、导航以及各种测量仪器中。锁相环及其应用电路是“通信电子电路”课程教学中的重点容,但比较抽象,还涉及到新的概念和复杂的数学分析。因此无论是教师授课还是学生理解都比较困难。为此,我们将基于Multisim的锁相环应用仿真电路引入课堂教学和课后实验。实践证明,这些仿真电路可以帮助学生对相关容的理解,并为进行系统设计工作打下良好的基础。锁相环的应用电路很多,这里介绍锁相环调频、鉴频及锁相接收机的Multisim仿真电路。 1.锁相环的仿真模型 首先在Multisim软件中构造锁相环的仿真模型(图1)。基本的锁相环由鉴相器(PD)、环路滤波器(I P)和压控振荡器(VCO)三个部分组成。图中,鉴相器由模拟乘法器A 实现,压控振荡器为V3,环路滤波器由R1、C1构成。环路滤波器的输出通过R2、R3串联分压后加到 压控振荡器的输入端,直流电源V2用来调整压控振荡器的中心频率。仿真模型中,增加R2、R3及的目的就是为了便于调整压控振荡器的中心频率。 图1 锁相环的仿真模型 2.锁相接收机的仿真电路 直接调频电路的振荡器中心频率稳定度较低,而采用晶体振荡器的调频电路,其调频围又太窄。采用锁相环的调频器可以解决这个矛盾。其结构原理如图2所示。
图2 锁相环调频电路的原理框图 实现锁相调频的条件是调制信号的频谱要处于低通滤波器通带之外,也就是说,锁相环路只对慢变化的频率偏移有响应,使压控振荡器的中心频率锁定在稳定度很高的晶振频率上。而随着输人调制信号的变化,振荡频率可以发生很大偏移。 图3 锁相环调频的仿真电路 根据图2建立的仿真电路如图3所示。图中,设置压控振荡器V1在控制电压为0时,输出频率为0;控制电压为5V时,输出频率为50kHz。这样,实际上就选定了压控振荡器的中心频率为25kHz,为此设定直流电压V3为2.5V。调制电压V4通过电阻Rs接到VCO的输人端,R实际上是作为调制信号源V4的阻,这样可以保证加到VCO输人端的电压是低通滤波器的输出电压和调制电压之和,从而满足了原理图的要求。本电路中,相加功能也可以通过一个加法器来完成,但电路要变得相对复杂一些。 VCO输出波形和输人调制电压的关系如图4所示。由图可见,输出信号频率随着输人信号的变化而变化,从而实现了调频功能。
双闭环直流调速系统调节器设计教材
课程设计任务书 信息工程与自动化学院学院自动化专业10 年级 学生姓名:_11 _______ 课程设计题目:______ 双闭环直流调速系统调节器设计_________ 课程设计主要内容: 根据要求完成调节器的计算与工程设计,实现1、稳态:无静差;2、动态指标:电流超调<5%;转速超调<10%;、振荡次数N<2次。并绘制相关电路原理图。 电机参数及指标要求: 设计一个双闭环直流电动机调速系统,整流装置采用三相桥式电路, 电动机参数:U N=220V, P N=500Kw,l dN=760A,n N=375r/min,Ce=1.82V.min/r, 过载倍数入=1.5,整流装置放大系数Ks= 75,电枢回路总电阻R= 0.14 欧,时间常数TI=0.031s,Tm=0.112s,电流反馈滤波时间常数Toi=0.002s, 转速反馈滤波时间常数Ton二0.02s,要求实现稳态无静差,电流超调量。 i %< 5%,空载起动到额定转速时的转速超调量(T n%w 10%,取转速调节器和电流调节器的饱和值为12V,输出限幅值为10V,额定转速时转速给定 Un*10V。 设计指导教师(签字):张寿明
教学基层组织负责人(签字):__________________________ 2013年12月10日摘要:双闭环直流调速控制系统有较好性能,因而得到广泛应用。在实 际应用中,选定电动机后,其参数是不可变的,只能通过改变双闭环直流调速系统内环电流调节器和外环的转速调节器的参数来提高整个系统的性能。建立系统的数学模型,分别按 二阶最佳和三阶最佳设计方案,采用PI 控制算法,对电流调节器和转速调节器进行设计,对所建立的模型在Matlab6 .5的环境下进行仿真,试验证明此设计是可行的。: 关键 字: 双闭环;直流调速系统;调节器 注:本系统设计由课本P95习题及运控大作业提供数据及初步模型
模拟锁相环实验报告
实验一 模拟锁相环模块 一、实验原理和电路说明 模拟锁相环模块在通信原理综合实验系统中可作为一个独立的模块进行测试。在系统工作中模拟锁相环将接收端的256KHz 时钟锁在发端的256KHz 的时钟上,来获得系统的同步时钟,如HDB3接收的同步时钟及后续电路同步时钟。 f 0=256K H z 64K H z U P 04U P 03B U P 02 U P 01512K H z 分频器÷4 分频器÷8 H D B 3 环路 滤波器 放大器图 2.1.1 模拟锁相环组成框图 T P P 02T E S T 跳线器K P 02V C O T P P 03T P P 06 T P P 04T P P 05 256K b itp s T P P 07带通滤波器 T P P 01 U P 03A 64K H z 该模块主要由模拟锁相环UP01(MC4046)、数字分频器UP02(74LS161)、D 触发器UP04(74LS74)、环路滤波器和由运放UP03(TEL2702)及阻容器件构成的输入带通滤波器(中心频率:256KHz )组成。在UP01内部有一个振荡器与一个高速鉴相器组成。该模拟锁相环模块的框图见图2.1.1。因来自发端信道的HDB3码为归零码,归零码中含有256KHz 时钟分量,经UP03B 构成中心频率为256KHz 有源带通滤波器后,滤出256KHz 时钟信号,该信号再通过UP03A 放大,然后经UP04A 和UP04B 两个除二分频器(共四分频)变为64KHz 信号,进入UP01鉴相输入A 脚;VCO 输出的512KHz 输出信号经UP02进行八分频变为64KHz 信号,送入UP01的鉴相输入B 脚。经UP01内部鉴相器鉴相之后的误差控制信号经环路滤波器滤波送入UP01的压控振荡器输入端;WP01可以改变模拟锁相环的环路参数。正常时,VCO 锁定在外来的256KHz 频率上。 模拟锁相环模块各跳线开关功能如下:
电流调节器设计举例样本
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 直流电动机: 220V、136A、1460r/min,Ce=0.132V﹒min/r,容许过载倍数λ=1.5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0.5 时间常数 电流反馈系数β=0.062V/A(β≈10V/1.5I N) 试按工程办法设计电流调节器,设计规定如下 规定稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统构造图如下
双闭环直流调速系统电流环设计 1.拟定期间常数 (1)整流装置滞后时间常数Ts 。 三相桥式电路平均失控时间 T s =0.0017s 。 -I dL U U + - - + - U ACR 1/R T s+1 R T s U * U K T s+1 I 1 + E β T s+1 1 T s+1 ASR 1 T s+1 α T s+1 U * n
(2)电流滤波时间常数 三相桥式电路每个波头时间是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因而取=2ms=0.002s。 (3)电流环小时间常数;按小时间常数近似解决,取=0.0037s。2.选取电流调节器构造 依照设计规定:5%,并且 因而可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选取电流调节器参数
ACR超前时间常数:== 0.03s。电流环开环增益:规定5%时,应取=0.5因而 于是,ACR比例系数为 4.校验近似条件 电流环截止频率s-1(1)晶闸管装置传递函数近似条件﹤ 当前= s-1> 满足近似条件
电流环设计
(1)确定时间常数 1)整流装置滞后时间常数s T 。按表2-2,三相桥式电路的平均失控时间s T =0.0017s 。 2)电流滤波时间常数oi T 。三相桥式电路每个波头的时间是3.3ms ,为了基本滤平波头,应有(1~2)oi T =3.33ms ,因此取oi T =2ms=0.002s 。 3)电流环小时间常数之和i T ∑。按小时间常数近似出黎,取∑i T =s T +oi T =0.0037s 。 (2)选择电流调节器结构 根据设计要求i σ≤5%,并保证稳态电流误差,可按典型Ⅰ型系统设计电流调节器。电流环控制对象是双惯性型的,因此可用PI 型电流调节器,其传递函数见式(3-48)。 检查对电源电压的抗扰性能:i l T T ∑≈0.0037 0.03≈8.11,参看表3-2的典型Ⅰ型系统动态抗扰性能,各项指标都是可以接受的。 (3)计算电流调节器参数 电流调节器超前时间常数:s T l 03.0i ==τ。 电流环开环增益:要求i σ≤5%是,按表3-1,应取i I T K ∑=0.5,因此 1-i I 135.10.0037 0.5T 0.5K s ≈== ∑ 于是,ACR 的比例系数为 1.5350.044 360.60.03135.1K R K K s i I i ≈???== βτ (4)校验近似条件 电流环截止频率:-1I ci 135.1s K ==ω 1)校验晶闸管整流装置传递函数的近似条件 ci ω>≈?=1-1-s 196.1s s 0.0017313T 1 满足近似条件 2)校验忽略反电动势变化对电流环动态影像的条件 ci l m s s T ω<≈??=--1136.9203 .022.013T 13 满足近似条件
基于锁相环的频率合成电路设计
基于锁相环的频率合成电路设计 0 引言 锁相环简称PLL,是实现相位自动控制的一门技术,早期是为了解决接收机的同步接收问题而开发的,后来应用在电视机的扫描电路中。由于锁相技术的发展,该技术已逐渐应用到通信、导航、雷达、计算机到家用电器的各个领域。自从20 世纪70年代起,随着集成电路的发展,开始出现集成的锁相环器件、通用和专用集成单片锁相环,使锁相环逐渐变成一个低成本、使用简便的多功能器件。如今,PLL 技术主要应用在调制解调、频率合成、彩电色幅载波提取、雷达、FM立体声解码等各个领域。随着数字技术的发展,还出现了各种数字PLL器件,它们在数字通信中的载波同步、位同步、相干解调等方面起着重要的作用。随着现代电子技术的飞快发展,具有高稳定性和准确度的频率源已经成为科研生产的重要组成部分。高性能的频率源可通过频率合成技术获得。随着大规模集成电路的发展,锁相式频率合成技术占有越来越重要的地位。由一个或几个高稳定度、高准确度的参考频率源通过数字锁相频率合成技术可获得高品质的离散频率源。 1 锁相环及频率合成器的原理 1.1 锁相环原理 PLL是一种反馈控制电路,其特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。因PLL可以实现输出信号频率对输入信号频率的自动跟踪,所以PLL通常用于闭环跟踪电路。PLL在工作的过程中,当输出信号的频率与输入信号的频率相同时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是PLL名称的由来。PLL通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,PLL组成的原理框图如图1所示。 PLL中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成uD(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压uC(t),对振荡器输出信号的频率实施控制。鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图2所示。
传动教材第2章转速电流双闭环直流调速系统和调节器的工程设计方法
第2章 转速、电流双闭环直流调速系统 和调节器的工程设计方法 2.1 转速、电流双闭环直流调速系统及其静特性 采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。 在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。这样的理想起动过程波形示于图2-1b 。 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。 2.1.1 转速、电流双闭环直流调速系统的组成 系统中设置两个调节器,分别调节转速和电流,如图2-2所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。这就形成了转速、电流双闭环调速系统。 转速和电流两个调节器一般都采用PI 调节器,图2-3。两个调节器的输出都是带限幅 + TG n ASR ACR U *n + - U n U i U * i + - U c TA M + - U d I d UPE - M T 图2-2 转速、电流双闭环直流调速系统结构 ASR —转速调节器 ACR —电流调节器 TG —测速发电机 TA —电流互感器 UPE —电力电子变换器 内外 n i
同步时序逻辑电路的习题 数字逻辑
第五章 同步时序逻辑电路的习题 一、基本知识点 1、时序逻辑电路的一般结构 特点:a 、有存储电路(记忆元件);有组合电路(特殊时可没有) b 、包含反馈电路,电路功能与“时序”相关 c 、输出不仅与输入(X )有关,而且与存储状态(Y )有关 分类:(1)Mealy 型 Z =F (X ,Q ) 输出是电路的输入和现态的函数(注意输出与输入有直接关系) (2)Moore 型 Z =F (Q ) 输出仅仅是电路现态的函数(注意输出与输入没有直接关系) 同步时序逻辑电路:各触发器共用同一时钟信号,即电路中各触发器状态的转换时刻在统一时钟信号控制下同步发生。 异步时序逻辑电路:电路没有统一的时钟信号对状态变化进行同步控制,输入信号的变化将直接引起电路状态的变化。 //本课程将较少讨论异步时序逻辑电路 2、同步时序逻辑电路的描述 注意:任一个同步时序逻辑电路的结构和功能可用3组函数表达式完整地描述。 (1)激励函数表达式:存储电路输入Y 与电路输入X 和现态Q 之间的关系 Y =F (X ,Q ) //现态Q 就是上图存储电路原始的输出y k (2)次态函数表达式:电路的次态Q n+1与激励函数Y 和现态Q 之间关系 Q n+1=F (Y ,Q ) //次态Q n+1就是上图存储电路再次触发后的输出y k n+1 (3)输出函数表达式:电路的输出Z 和输入X 和当前现态Q 的关系 Mealy 型 Z =F (X ,Q ) Moore 型 Z =F (Q ) 输入信号 输出信号 X 1 X 2 X n Z 1 Z 2 Z m y s 过去输入 现态 现在输入 } 输出 输出 所有输入 现态
单元15-时序逻辑电路
第十六单元时序逻辑电路 (8学时——第49~56学时) 主要容:时序逻辑电路的分析与设计 教学重点:时序逻辑电路的分析与设计方法 教学难点:时序逻辑电路的设计 教学方法:启发式教学、探究式教学 教学手段:实验、理论、实际应用相结合 第一部分知识点 一、时序电路概述 时序电路的状态及输出是与时间顺序有关的,由组合电路和存储电路(多为触发器)组成,1、特点 任意时刻的输出,不仅与该时刻的输入有关、还与电路原来的状态有关。 2、分类 按逻辑功能分为计数器、寄存器等,按触发器工作分为同步电路和异步电路,按电路输出信号特性分为Mealy型(输出与输入及电路现态有关)和Moore型(输出仅与电路现态有关)电路。 二、时序电路的分析 1、分析步骤 (1)写出电路的时钟方程(各触发器的CP表达式)、输出方程(各输出端表达式)及驱动方程(各触发器的触发信号表达式)。 (2)求出电路的状态方程(各触发器的状态表达式) (3)计算得出电路工作状态表 (4)画状态图及时序图 (5)分析电路功能 2、分析举例 分析时序电路
(1)时钟方程CP0=CP1=CP2=CP 输出方程n n n Q Q Q Y 1 2 = 驱动方程n Q J 2 =、n Q K 2 =,n Q J 1 =、n Q K 1 =,n Q J 1 2 =、n Q K 1 2 =(2)状态方程 将J、K代入JK触发器特征方程n n n Q K Q J Q+ = +1得各触发器状态方程: n n Q Q 2 1 = +、n n Q Q 1 1 = +、n n Q Q 1 1 2 = + (3)计算得到状态表 现态次态输出 n Q 2 n Q 1 n Q 1 2 | n Q+1 1 + n Q1 + n Q Y 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 1 0 0 0 0 1 0 1 0 0 1 1 0 1 1 1 1 1 1 1 (4)画状态图及时序图 (5)逻辑功能 这是一个有六个工作状态的同步工作电路,属Moore型电路。 (6)有效态和无效态
基于Matlab的数字锁相环的仿真设计
基于Matlab的数字锁相环的仿真设计 摘要:锁相环是一个能够跟踪输入信号相位变化的闭环自动跟踪系统。它广泛应用于无线电的各个领域,并且,现在已成为通信、雷达、导航、电子仪器等设备中不可缺少的一部分。然而由于锁相环设计的复杂性,用SPICE对锁相环进行仿真,数据量大,仿真时间长,而且需进行多次仿真以提取设计参数,设计周期长。本文借助于Matlab中Simulink仿真软件的灵活性、直观性,在Simulink 中利用仿真模块搭建了全数字锁相环的仿真模型。先借助模拟锁相环直观形象、易于理解的特点,通过锁相环在频率合成方面的应用,先对模拟锁相环进行了仿真,对锁相环的工作原理进行了形象的说明。在模拟锁相环的基础上,重新利用仿真模块搭建了全数字锁相环的仿真模型,通过仿真达到了设计的目的,验证了此全数字锁相环完全能达到模拟锁相环的各项功能要求。 关键词:锁相环,压控振荡器,锁定,Simulink,频率合成,仿真模块 1引言 1932年法国的H.de Bellescize提出同步捡波的理论,首次公开发表了对锁相环路的描述。到1947年,锁相环路第一次应用于电视接收机的水平和垂直扫描的同步。到70年代,随着集成电路技术的发展,逐渐出现集成的环路部件、通用单片集成锁相环路以及多种专用集成锁相环路,锁相环路逐渐变成了一个成本低、使用简便的多功能组件,为锁相技术在更广泛的领域应用提供了条件。锁相环独特的优良性能使其得到了广泛的应用,其被普遍应用于调制解调、频率合成、电视机彩色副载波提取、FM立体声解码等。随着数字技术的发展,相应出现了各种数字锁相环,它们在数字信号传输的载波同步、位同步、相干解调等方面发挥了重要的作用。而Matlab强大的数据处理和图形显示功能以及简单易学的语言形式使Matlab在工程领域得到了非常广泛的应用,特别是在系统建模与仿真方面,Matlab已成为应用最广泛的动态系统仿真软件。利用MATLAB建模可以快速地对锁相环进行仿真进而缩短开发时间。 1.1选题背景与意义 Matlab是英文MATrix LABoratory(矩阵实验室)的缩写。1980年,时任美国新墨西哥大学计算机系主任的Cleve Moler教授在给学生讲授线性代数课程时,为使学生从繁重的数值计算中解放出来,用FORTRAN语言为学生编写了方便使用Linpack和Eispack的接口程序并命名为MATLAB,这便是MATLAB的雏形。经过几年的校际流
Moore型同步时序逻辑电路的设计与分析
实验九Moore型同步时序逻辑电路的分析与设计 22920132203686 薛清文周2下午实验 一.实验目的: 1.同步时序逻辑电路的分析与设计方法 2.D,JK触发器的特性机器检测方法。 2.掌握时序逻辑电路的测试方法。 3.了解时序电路自启动设计方法。 4.了解同步时序电路状态编码对电路优化作用。 二.实验原理: 二、 1.Moore同步时序逻辑电路的分析方法: 时序逻辑电路的分析,按照电路图(逻辑图),选择芯片,根据芯片管脚,在逻辑图上标明管脚号;搭接电路后,根据电路要求输入时钟信号(单脉冲信号或连续脉冲信号),求出电路的状态转换图或时序图(工作波形),从中分析出电路的功能。 2.Moore同步时序逻辑电路的设计方法: (1)分析题意,求出状态转换图。 (2)状态分析化简:确定等价状态,电路中的等价状态可合并为一个状态。(3)重新确定电路状态数N,求出触发器数n,触发器数按下列公式求:2n-1 一:电流环参数的调节 1:PMSM传动控制系统中,电机运行速度范围很宽,电流频率范围从零到上百赫兹,要在这么宽的频率范围内准确地检测电机电流,常选用霍尔元件实现电机电流的检测。 霍尔检测方法优点:动态响应好,信号传输线性及频带范围宽等优点。 为保证电机对称运行,电流三相各反馈信道的反馈系数必须相等,这就要精心选择调理电路组件,仔细调整反馈回路参数。信号调理电路使用模拟放大器时,放大器的零漂是影响电机低速运行性能的主要因素,要仔细调整放大器,将零点漂移控制在10mv以内。 2:PMSM调速系统需要电机有很宽的调速范围,达到10^4:1以上,要在这么宽的速度范围内检测出电机的速度,以实现调速系统的控制确实是个很重要的问题。尽管T法在低速时有很好的测速精度,但研究调速系统控制的论文极少见使用(T或M/T)法测速的,基本上都是采用M法测速。实际上,当电机处于极低转速时,电机能否稳定运行不仅仅取决于位置传感器及其所送来的脉冲信号,还有速度调节器的作用,以及电流环与电机转子惯性环节的影响,所以,M法仍可用于低速范围内电机速度的检测与反馈。 3:电流调节器参数对电流环的动态响应具有决定性影响。 电流调节器比例系数越大,电流阶跃跟踪响应速度越快,响应的超调越大,振荡次数越多。电流调节器的积分系数越大,电流阶跃跟踪响应的稳态误差越小,但太大会引起电流环振荡。 PMSM调速控制系统的电流环控制对象为PWM逆变器、电机电枢绕组、电流检测环节组成。在实际系统运行过程中,电流环的相应受电机反电势的影响,电流环动态响应不好,为提高永磁同步电机调速系统电流环动态响应性能,抑制反电动势对电流环的影响,在实际系统电流调节器制作时,比例和积分系数均做了调整,增大比例系数,减小积分时间常数。 电流环响应若不加微分负反馈环节,电流环动态响应将会出现振荡与超调。然而实际应用中,通常不加微分反馈环节,因为微分极易引起系统的振荡。而且按照电流环I型系统的校正原则,采用PI控制才能实现电流环系统的稳定性和高动态响应。 二、速度环参数的调节 采用II型系统设计的速度环,实际应用中,在速度阶跃过程中,速度调节器会出现饱和,系统的实际运行情况和设计时所采用的线性对象具有很大的差别,调节器设计时的初始条件和实际系统退饱和后调节器参与调节时的初始条件有很大差别。因此按照II型系统设计的速度环需要作很大的调整才能满足实际系统的需要。但该设计方法关于调节器的形式选择仍然适用。 从自动控制原理可知,调速控制系统的速度超调是使用PI调节器并要求有快速响应的必然结果,原因是速度调节器要退出饱和,参与调解。 随着速度调节器输出限幅的增加,速度响应加快,到达指定速度时的振荡程度增加。输出限幅数值决定电机在动态过程中加速力矩的大小,影响电机在加减速过程中的加速度,影响调速系统的速度响应过程。输出限幅值要合理设置,应该充分利用电机的过载能力,以提高调速控制系统的速度响应性能。同时,在调速控制系统中可设置速度微分负反馈(肖老师建议速度环一般不要加前馈),可以 南京机电职业技术学院 毕业设计(论文) 题目 40MHz简易锁相环的设计 系部电子工程系专业电子信息技术工程 姓名王鑫学号 G1210145 指导教师吕彬森 2015 年 04 月09日 摘要 在无线收发信机电路中,除了发射机和接收机外,还有一个非常重要的部分就是本地振荡电路。为了保证本地振荡模块输出信号的频率稳定性和较低的相位噪声,通常本振采用锁相环技术来实现,特别在无线通信领域。 本文阐述了锁相环的基本结构和工作原理,从锁相环稳定性的角度出发,给出了无线通信电路中使用40MHz 锁相环的电路设计,并且将方案中锁相环电路进行了仿真,最终满足40MHz 锁相环的设计要求。 关键词:锁相环;鉴相器;压控振荡器 Abstract(外语专业的需要) 【英文摘要正文输入】 In the wireless transceiver circuit, in addition to the transmitter and the receiver, there is a very important part of the local oscillator circuit is. In order to ensure the stability of the local oscillator module, output signal frequency and low phase noise, the vibration by using phase locked loop technique, especially in the field of wireless communications. This paper introduces the basic structure and working principle of the phase-locked loop PLL, starting from the stability of the 40MHz PLL circuit design is given of the use of wireless communication circuit, and the scheme of PLL circuit simulation, and ultimately meet the design requirements of 40MHz phase locked loop. Keywords: Attenuation network; Attenuation quantity; Amplifier; broadband 第二章转速、电流双闭环直流调速系统和调节器 的工程设计方法 内容提要: 转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。本章着重阐明其控制规律、性能特点和设计方法,是各种交、直流电力拖动自动控制系统的重要基础。我们将重点学习: ●转速、电流双闭环直流调速系统及其静特性 ●双闭环直流调速系统的数学模型和动态性能分析 ●调节器的工程设计方法 ●按工程设计方法设计双闭环系统的调节器 ●弱磁控制的直流调速系统 2.1 转速、电流双闭环直流调速系统及其静特性 问题的提出: 第1章中表明,采用转速负反馈和PI调节器的单闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。 1. 主要原因 是因为在单闭环系统中不能随心所欲地控制电流和转矩的动态过程。在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制电流的,但它只能在超过临界电流值 Idcr 以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想地控制电流的动态波形。 2.理想的启动过程 a) 带电流截止负反馈的单闭环调速系统 b) 理想的快速起动过程 2-1 直 流调速系统起动过程的电流和转速波形 性能比较: 带电流截止负反馈的单闭环直流调速系统起动过程如图所示,起动电流达到最大值Idm 后,受电流负反馈的作用降低下来,电机的电磁转矩也随之减小,加速过程延长。理想起动过程波形如图所示,这时,起动电流呈方形波,转速按线性增长。这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动过程。 3. 解决思路 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值Idm的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用 双环反馈控制的 SPWM 逆变电源中电流环的设计 陈元娣,朱忠尼,林 洁 (空军雷达学院电子对抗系, 武汉 430019 摘要:针对目前电流环的设计方法不明确的问题, 通过建立 DC/AC系统的动态模型并对该模型进行理 论上的推导和分析得出了电流环的设计方法. 该方法在系统参数不完全明确的情况下, 电流内环尽量采取 PI 调节器, 将使系统的稳定性更好, 参数调整比较方便, 能满足一定的带宽和动态特性. 通过仿真实验验证了理论推导的正确性. 关键词:逆变器 ; 双环反馈 ; 电流环中图分类号:TM464 文献标识码:A 近年来, SPWM 正弦波逆变器的反馈控制技术发生 2个较大变化, ①单环控制变为多环控制, ②有效值恒定反馈变为“瞬时” 值反馈, 目的是为了提高系统的动态响应速度和改善并控制在任意负载, 特别是非线性负载下的输出波形 . 对于双环 系统, 一般采取电压外环, 电流内环的设计. 电压环的作用是跟踪和稳定输出电压,它的设计大多采取 PI 调节器模式. 电流环的作用是使逆变器的动态响应加快, 负载适应能力加强, 并具有输出电流限制能力, 可提高系统的可靠性, 因此, 电流环的设计是双环反馈控制的关键技术之一.对于电流环的设计, 常见有 P 和 PI 2种设计方法 , 在实际应用中到底选哪种方法合适,目前还没有成熟的结论. 本文通过建立 DC/AC系统的动态模型, 对该模型进行理论上的简化和特性分析.理论分析表 明:在系统参数不完全明确的情况下, 电流内环尽量采取 PI 调节器; 当系统参数基本明确或系统的惯性较小 (如大功率逆变器情况下, 可以考虑采取 P 调节器, 可以降低系统的调节难度, 提高系统的响应速度.通过对实际系统的仿真验证了本文结论的正确性. 1系统动态模型的简化设计原则 图 1是 SPWM 正弦波逆变器的功率电路原理 框图. 图 2是其等效模型, 图中 T 1=L /r 为滤波器电感的时间常数, r 为滤波电感直流电阻, T 为电压检测电路 的延迟时间常数, LT 为电流环, SPWM 控制器加逆 变器的等效模型为 G 1= K PWM U ab s Ls +r s s 时序逻辑电路分析例题 1、分析下图时序逻辑电路。 解: 1、列出驱动方程:111==K J 1//122Q A AQ K J +== 2、列出状态方程: 将驱动方程代入JK 触发器的特性方程Q K JQ Q //*+=得: /1*1Q Q = 212/1//21//2/1*2Q AQ Q Q A Q Q A Q AQ Q +++= 3、列出输出方程: 21//2/1Q Q A Q AQ Y += 4、列出状态转换表: (1)当A=1时: 根据:/1*1Q Q =;21/2/1*2Q Q Q Q Q +=;/2/1Q Q Y =得: (2)当A=0时: 根据:/1*1Q Q =;2/1/21*2 Q Q Q Q Q +=;21Q Q Y =得 : 5、画状态转换图: 6、说明电路实现的逻辑功能: 此电路就是一个可逆4进制(二位二进制)计数器,CLK 就是计数脉冲输入端,A 就是加减控制端,Y 就是进位与借位输出端。当控制输入端A 为低电平0时,对输入的脉冲进行加法计数,计满4个脉冲,Y 输出端输出一个高电平进位信号。当控制输入端A 为高电平1时,对输入的脉冲进行减法计数,计满4个脉冲,Y 输出端输出一个高电平借位信号。 2、如图所示时序逻辑电路,试写出驱动方程、状态方程,画出状态图,说明该电路的功能。 解:驱动方程 ?? ?=⊕=1010K Q X J n ???=⊕=11 1K Q X J n 状态方程 ()()n n n n n n n n n n n n n n Q XQ Q Q X Q Q X Q Q Q X Q Q X Q Q X Q 0 1 1 1 1 010110 11+=⊕=+=⊕=++ 1J 1K C1 1J 1K C1 1 Q 0 Q CP X Z =1 =1 =1 & FF 1 FF 0 1 1 电流环PID 调节器设计大致流程 以下设计过程主要参考文献[1],首先给出永磁同步电机参数表如下: 电机的反电势会使电流输出与给定存在偏差,但低速时反电势较小,可通过调节器的控制消除, 因此设计时可忽略不计。电流环传函结构图如图1所示,其中,v K 是逆变器电压放大倍数,表示逆变器直流侧电压与三角载波电压幅值之比,v τ是逆变器时间常数,与开关频率有关,s R 是电枢绕组电阻,q L 是交轴电感,β 是反馈系数, oi T 是反馈滤波时间常 数,ACR G 是电流调节器传递函数。 图1 未加校正时的电流环开环传函如下: (1)()(1)v iob v q s oi K G S L S R T S βτ= +++ (1) 式中: v τ、oi T 是小时间常数, 因此可将控制对象等效: ()[()1] v iob q s v oi K G L S R T S βτ=+++ (2) 电流调节器可选用 PI 调节器进行设计: 1p i ACR i K K S G K S += (3) 用 PI 调节器的零点来抵消控制对象的大时间常数极点, 如下: 11q p i s L K K S S R += + (4) 得到电流环的开环传递函数: [()1]*v ik i oi v s K G K S T S R βτ=++ (5) 系统要求电流环具有较快的响应速度, 同时超调又不可过大, 因此令: ()0.5v oi v i s K T K R βτ+= (6) 设定逆变器开关频率为f=18kHz ,于是逆变器时间常数155.6v us f τ==,将15.5dc v s U K U ==、0.6β=、 0.11ms oi T =和表1的电机参数代入到式(4)、式(6)中,得 6.5p K =,0.0022i K =。 加入 PI 调节器之前的系统开环幅相频率特性曲线如图2 所示, 系统明显不稳定; 加入 PI 调节器后得到的系统开环的幅相频率特性曲线如图 3 所示, 可见所设计的电流环是稳定的, 且有 45°左右的相角裕度。 图2 原系统幅相频率特性曲线 图3 补偿后电流环幅相频率特性曲线 参考文献: [1]刘军,敖然,韩海云,秦海鹏,朱德明.永磁同步电动机伺服系统电流环优化设计[J ]. 微特电机,2012,40(6):17-20. [2]熊小娟,韩亚荣,邱鑫.永磁同步电机伺服系统电流环设计及性能分析[J ]. 科技传播,2010,5(上):62-63. [3]陈荣,邓智泉,严仰光.永磁同步服系统电流环的设计[J ]. 南京航空航天大学学报,2004,36(2):220-225.PMSM电流环速度环位置环设计与实现中的心得体会
简述锁相环
《电力拖动自动控制系统》-第二章转速、电流双闭环直流调速系统和调节器的工程设计方法
双环反馈控制的SPWM逆变电源中电流环的设计(精)
时序逻辑电路分析举例
电流环调节器设计过程