PLC实验报告4.机械手

一、实验内容
机械手未工作时处于初始位置右上方。按下起动按钮SB1,汽缸B立即工作向下伸长,到达下方限位开关位置后,汽缸C开始工作抓紧物体M,抓紧后汽缸B停止工作向上缩回,到达上方限位开关位置后,汽缸A开始工作向左伸长,到达左方限位开关位置后,汽缸B 工作向下伸长,到达下方限位开关位置后,汽缸C停止工作松开物体M,确认松开后汽缸B 停止工作向上缩回,到达上限位开关位置后汽缸A停止工作向右缩回,到达右限位开关位置后汽缸B工作向下伸长,不断重复上述操作直到按下停止按钮SB2,汽缸ABC全部停止工作,机械手回到初始位置右上方。
二、硬件分析
1.输入
启动、停止操作需2个DI点;模拟机械手上、下、左、右四个位置以及机械手是否夹住物体M的限位开关,需五个DI点;因此一共需要7个DI点。
2.输出
模拟汽缸A、B、C工作需3个DO;指示机械手所在位置及其是否夹紧需要5个DO点;因此一共需要8个DO点。
三、地址分配
1.数字量输入DI
I0.0启动按钮SB1
I0.1限位按钮LS1
I0.2限位按钮LS2
I0.3限位按钮LS3
I0.4限位按钮LS4
I0.5限位按钮LS6
I0.6停止按钮SB2
2.数字量输出DO
Q0.0状态指示灯LED 9
Q0.1位置指示灯LED1
Q0.2位置指示灯LED2
Q0.3位置指示灯LED3
Q0.4位置指示灯LED4
Q0.5状态指示灯LED6
Q0.6状态指示灯LED 7
Q0.7状态指示灯LED 8
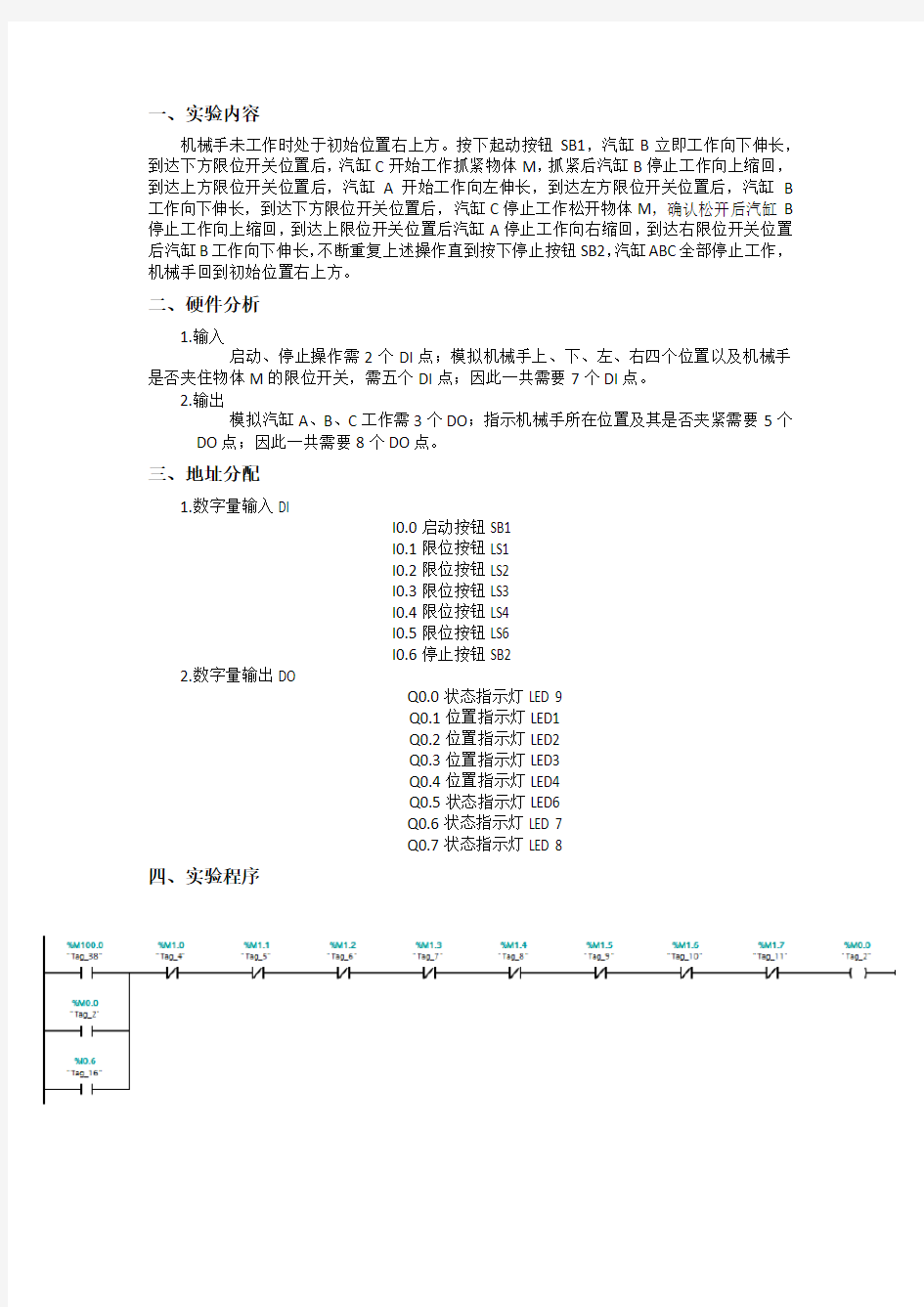
四、实验程序
五、程序说明
此为机械手模拟实验。其中,按下按钮LS1模拟机械手到达最右边碰到限位开关LS1,按下按钮LS2模拟机械手到达最左碰到限位开关LS2,按下按钮LS3模拟机械手到达最下碰到限位开关LS3,按下按钮LS4模拟机械手到达最上面碰到限位开关LS4,按下按钮LS6模拟物体M碰到机械手上的限位开关LS6;指示灯LED1亮表示机械手当前所处位置为右,LED2亮表示机械手当前所处位置为左,LED 3亮表示机械手当前所处位置为下,LED 4亮表示机械手当前所处位置为上,LED6点亮表示汽缸A开始工作,LED7点亮表示汽缸B开始工作,LED8点亮表示汽缸C开始工作,LED 9亮表示机械手处于夹紧状态。
程序采用顺序控制方法,将机械手工作流程划分成9个状态:M0.0、M1.0、M1.1、M1.2、M1.3、M1.4、M1.5、M1.6、M1.7,具体工作情况如下。
M0.0状态:L1、L4亮,表示机械手在初始位置右上方。
M1.0状态:L1、L7亮,表示机械手在右边,汽缸B开始工作;
0.5s后L4灭,表示汽缸B向下伸长,即机械手离开上面在下移途中;
M1.1状态:L3亮,表示机械手在下边,汽缸B伸至最长;
0.5s后L8亮,表示汽缸C开始工作,机械手开始抓取物体M;
M1.2状态:1s后L9亮,表示机械手已经夹紧物体M;
1.5s后L3、L7灭,表示汽缸B停止工作,机械手向上回缩离开下面;
M1.3状态下:L4、L6亮,表示机械手已在上面,汽缸A开始工作;
0.5s后L1灭,表示汽缸A向左伸长,即机械手离开右边在下移途中;
M1.4状态:L2、L7亮,表示机械手到达左边,汽缸B开始工作;
0.5s后L4灭,表示汽缸B向下伸长,机械手在下移途中;
M1.5状态:L3亮,表示机械手在下边,汽缸B伸至最长;
0.5s后L8灭,表示汽缸C停止工作,机械手松开物体M;
M1.6状态:1s后L9灭,表示物体M已远离机械手;
1.5s后L3、L7灭,表示汽缸B停止工作机械手向上回缩;
M1.7状态下:L4亮、L6灭,表示机械手已在上面,汽缸A停止工作;
0.5s后L2灭,表示汽缸A向右缩回,即机械手在向右移动。
M1.7状态后又转移至M1.0状态实现循环,机械手重复操作。直到按下停止按钮,不管此时在哪个状态都将转移至M0.0状态,所有汽缸停止工作,机械手回到初始位置。
六、调试结果
调试成功
最新西华大学机器人创新设计实验报告(工业机械手模拟仿真)
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)
PLC机械手(课程设计)
河南机电高等专科学校课程设计报告书 课程名称:《PLC技术与工程应用》 课题名称:机械手电气控制系统设计 系部名称:自动控制系 专业班级:生产过程自 姓名: 学号:121 2014年06月26日
设计任务书 设计任务书 设计目的: 1、学习PLC电气控制系统的开发过程和系统设计思路; 2、锻炼实际应用程序开发能力; 3、提高电气制图、流程图绘制及办公文档编辑能力。 设计要求: 1、设置机械手复位按钮 机械手每次的工件输送过程,都应该从初始位置开始。定义右转到位、上行到位、退回到位及手指张开到位同时满足时为机械手初始位置。开机运行时,机械手应该首先自动回到初始位置;若遇到特殊情况,机械手停在非初始位置,按下复位按钮即可实现复位。 2、设置单步/连续切换开关 a.在单步模式下按下启动按钮(若机械手处于初始位置,则开始运行;否则,按下复位键,使机械手复位)→伸出→下行→手指夹紧→上行→左转→下行→手指张开→上行→退回→右转→停止 b.在连续模式下按下启动按钮,上述动作依次发生,但回到初始位置之后,继续下一个工件的传输过程。连续模式下,按下停止按钮,待本次工件传输工作结束后,停止运行。
《PLC技术与工程应用》课程设计报告书 目录 目录 ......................................................................................................... I 1 设计思路或方案选择 ............................................................. - 1 -1.1 机械手简述 ............................................................................. - 1 - 1.1.1 设计功能及硬件组成 ............................................................ - 1 -1.2 系统组成 ................................................................................. - 2 - 1.2.1 输出驱动单元......................................................................... - 2 - 1.2.2 输入检测单元......................................................................... - 3 - 1.3 PLC工作原理 .......................................................................... - 3 - 2 硬件电路设计 ............................................................................... - 4 -2.1 输入输出接口电路介绍 ......................................................... - 4 - 2.1.1 输入电路板............................................................................ - 4 - 2.1.2 输出板电路............................................................................ - 5 - 2.1.3 驱动电路 ............................................................................... - 5 - 2.1.4 控制电路原理图 ..................................................................... - 6 -2.2 I/O分配表 .............................................................................. - 6 - 2.2.1 输入信号 ............................................................................... - 6 - 2.2.2 输出信号 ............................................................................... - 7 - 2.3 机械手运动示意图 ................................................................. - 7 - 3 软件设计......................................................................................... - 8 -3.1 总流程图及说明 ..................................................................... - 8 -3.2 重要程序及说明 ..................................................................... - 9 -
plc实验报告
《可编程序控制器及应用》实验报告一 实验名称:PLC基本指令实验 3.实验原理和设计思想 (1). 开关量信号的边沿检测。 PLS(上升沿脉冲):原件Y、M仅在驱动输入接通后的一个扫描周期内动作(置1)。 PLF(下降沿脉冲):原件Y、M仅在驱动输入断开后的一个扫描周期内动作。 (2). 延时断开电路。 OUT输出:驱动定时器线圈、驱动计数器线圈 (3). 信号灯闪烁电路。 OR或:常开触点并联链接 多重输出电路 OUT输出:驱动定时器线圈、驱动计数器线圈 (4).抢答指示灯控制电路 有A、B、C 三人参加智力竞赛,当主持人接通抢答允许开关后,抢答开始,最先按下按钮的抢答者指示灯亮,与此同时,禁止另外两人的灯亮,指示灯在主持人断开抢答允许开关后熄灭。 4.PLC的I/O端分配及接线电路图
5.PLC程序(梯形图) (1). 开关量信号的边沿检测。 用PLS 指令检测开关量信号的上升沿;用PLF 指令检测开关量信号的下降沿。 设计实验方法、画出电路、编制梯形图、验证实验结果。 (2). 延时断开电路。 LED 在输入按钮按下的上升沿变为亮,在按钮变为OFF 后的6s,LED 才变为OFF。 (3). 信号灯闪烁电路。 用二个定时器实现指示灯LED 通电1.5s、断电1.2s 的闪烁过程。 (4).抢答指示灯控制电路
6.实验调试过程和运行现象 (1). 开关量信号的边沿检测。 用PLS 指令检测开关量信号的上升沿;用PLF 指令检测开关量信号的下降沿。 现象:SB1常开→X0灯亮→Y0灯亮→LED灯1亮 SB2常开→SB2常闭→Y1灯亮→LED灯2亮 (2). 延时断开电路。 LED 在输入按钮按下的上升沿变为亮,在按钮变为OFF 后的6s,LED 才变为OFF。 现象:按下按钮灯亮,松开按钮6S后,LED灯灭 (3). 信号灯闪烁电路。 用二个定时器实现指示灯LED 通电1.5s、断电1.2s 的闪烁过程。 现象:LED灯亮1.5s、灭1.2s,形成闪烁过程。 (4).抢答指示灯控制电路 有A、B、C 三人参加智力竞赛,当主持人接通抢答允许开关后,抢答开始,最先按下按钮的抢答者指示灯亮,与此同时,禁止另外两人的灯亮,指示灯在主持人断开抢答允许开关后熄灭。 7.实验结果分析 进一步熟悉编程软件的使用方法,掌握了PLS(上升沿脉冲) , PLF(下降沿脉冲),OR或,多重输出电路,OUT输出指令的使用和编程方法。
平面设计实验报告文档2篇
平面设计实验报告文档2篇Graphic design experiment report document
平面设计实验报告文档2篇 小泰温馨提示:实验报告是把实验的目的、方法、过程、结果等记录 下来,经过整理,写成的书面汇报。本文档根据实验报告内容要求展 开说明,具有实践指导意义,便于学习和使用,本文下载后内容可随 意修改调整及打印。 本文简要目录如下:【下载该文档后使用Word打开,按住键盘 Ctrl键且鼠标单击目录内容即可跳转到对应篇章】 1、篇章1:一、我的面试文档 2、篇章2:二、我的工作过程文档 摘要:实践是检验真理的标准,作为一名即将毕业的学生,在经历了大学三年的理论学习之后,必须接受一段时期的实践。因为传统的纸上谈兵已经不能适应社会和行业对于学毕业生的严厉要求,因此这次是我正式接触社会的时刻。我相信“不经一番寒彻骨,怎得梅花扑鼻香。”这是古人得之于实践 的名句,千百年来一直回荡在一代又一代人的耳际。如今,即 将离开象牙塔的我,也应在一番寒彻骨之后寻得人生的梅花香。 实践目的:熟悉公司的运作流程,掌握设计的基本要求, 工作程序、工作方法、职业素质要求熟练专业技能,将书本知
识与实践相结合运用到实际工作中,提前适应市场的发展和社会的要求及毕业后的工作生活。 实践时间:20xx年12月01日到20xx年12月31日 实践地点:广州xxx有限公司 篇章1:一、我的面试文档 上公司进行面试,对于经验尚浅的我少不了紧张,焦急 的情绪。我知道,要给经理留下好的第一印象是很重要的,因为这关乎到我的面试合格与否。面试那一天我并没有很刻意为自己打扮什么,而是朴素大方,洁净整齐。因为我知道:一个人脸上的表情,要比她身上的衣装重要多了。除了衣着方面,我更注重时间。我一向是一个守时的人。守时是我个人的一项基本原则。这次我也不例外,因为我知道,时间对于每一个人来说都是珍贵的,应该是公平的。拖延时间即偷窃时间。任何的早到或者迟到都会扰乱别人的正常工作。因此我把时间控制得很好,既不早到也不迟到。这样就为我们的谈话奠定了基础。 见到经理,我始终脸带微笑。我为自己能在短时间内舒 缓紧张的心情而感到高兴。我首先介绍了自己,整个谈话过程都比较畅顺,气氛也比较轻松,由于我只是实习生,而且操作比较简单,经理并没有刻意刁难。终于我被录用了。
机械手控制实验报告
中北大学 信息商务学院 《机床电气控制与PLC》实验报告 学院: 业:专班级:学号: 姓名:
月6年2014 实验机械手的PLC控制 .实验目的一1.进一步熟悉机床电气控制环节中常用的低压电器,熟练掌握按钮、接触器等低压电器的工作原理及其安装、接线等使用方法。; 2.掌握PLC控制系统设计方法与步骤,掌握PLC的基本硬件配置及硬件连接方法。 3.掌握机械手的基本控制手段,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。二.实验内容及要求 本实验的目的是通过PLC实现机械手的操作控制,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。学生完成PLC控制电路、完成硬件连接、编写控制程序并现场调试。 要求: 1.选择PLC并设计PLC控制电路。要求PLC选型合理、控制方式简单可靠; 2.选取所需的硬件元件完成硬件连接; 3.编写控制程序。要求程序简单可靠、结构合理; 4.系统必须能够调试通过,运转达到设计要求 二.实验仪器及设备 计算机一台、机械手工作台1套、控制按钮若干、PLC基本模块1个、各种导线若干、PLC编程软件。 三.实验步骤 1.根据实验要求,确定要实现的功能并设计状态转移图: 2.根据给定的PLC和所设计的控制功能进行元器件选择和PLC的I/O分配,并填写在表1-1中。表1-1 电机控制I/O分配表 输入输出器件功输出端输入端器件功器件名器件名
3. 根据I/O分配表画出I/O接线图,并连接控制线路。 所设计的控制电路接线图: 4. 根据控制要求编写PLC程序(以梯形图的方式或者指令表方式)。所设计的梯形图或状态转移图: 指令表:
机械手的PLC控制 PLC课程设计
一、要求 机械手的PLC控制 1.设备基本动作:机械手的动作过程分为顺序的8个工步:既从原位开始经下降、夹紧、上升、右移、下降、放松、上升、左移8个动作后完成一个循环(周期)回到原位。并且只有当右工作台上无工件时,机械手才能从右上位下降,否则,在右上位等待。 2.控制程序可实现手动、自动两种操作方式;自动又分为单工步、单周期、连续三种工作方式。 3.设计既有自动方式也有手动方式满足上述要求的梯形图和相应的语句表。 4. 在实验室实验台上运行该程序。 二参考 1. “PLC电气控制技术——CPM1A系列和S7-200” 书中212页“8.1.3机械手的控制” 2. “机床电气控制”第三版王炳实主编 书中156页“三、机械手控制的程序设计”。 3.“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。其中工作方式时手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。 注解: “PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”例中只有手动和自动(连续)两种操作模式,使用顺序控制法编程。PLC 机型选用CPM2A-40型,其内部继电器区和指令与CPM1A系列的CPM有所不同。 “机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。本例中的程序是用三菱公司的F1系列的PLC指令编制。有手动、自动(单工步、单周期、连续)操作方式。手动方式与自动方式分开编程。参考其编程思想。 “可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。其中工作方式有手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。用CPM1A编程。 这里“误操作禁止”是指当自动(单工步、单周期、连续)工作方式时,按
浙大食品包装设计实验报告RSY-R2热缩试验仪的使用
实验报告Array课程名称:食品包装设计指导老师:丁甜成绩:__________________ 实验名称:RSY-R2热缩试验仪的使用同组成员: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、实验材料与试剂(必填)四、实验器材与仪器(必填) 五、操作方法和实验步骤(必填)六、实验数据记录和处理 七、实验结果与分析(必填)八、讨论、心得 一、实验目的和要求 通过本实验的学习,让学生熟练掌握热缩试验仪的使用,培养其实验操作技能。 二、实验内容和原理 实验原理: 热缩试验仪,专业适用于各种薄膜、热缩管、药用PVC硬片、背板等材料在多种温度下的液体介质中进行热收缩性能及尺寸稳定性的测试。通过对包装材料的热收缩性测试,帮助生产商来评定产品塑料包装材料的遇热收缩性能,用来控制包装产品质量。 实验内容: 测定各种薄膜在多种温度下的液体介质中的热收缩性能及尺寸稳定性。 三、实验材料与试剂 待测材料,浅蓝PE、深蓝PE两种。 四、实验器材与仪器 RSY-R2热缩试验仪 五、操作方法和实验步骤 (1)打开仪器电源开关,检查仪器显示是否正常。 (2)客户需准备1000毫升硅油,将硅油加入液体浴腔,油的高度要高于温度传感器探头。 (3)在仪器面膜左侧的温控表上设置需要的试验温度,温度设置可从室温到2000C,按表上的“数据移位”键(由左至右第二个按钮),将小数点移到相应的位置上,按“加、减”键可快速改变温度值,绿色数字显示设置的温度,红色数字显示浴腔内实际温度。 (4)当实际温度达到设定的温度值后,再等待5分钟后进行试验。 (5)按除“复位”键以外的任意键进入主界面,按“右箭头”选择“设置”,按 “确认”键进入设置内容。 (6)按“上、下”键,改变加热时间,按“确认”键保存数据。 (7)按“返回”键返回到主界面,选择“试验”,按“确认”键进入“试验”界 面。 (8)当温度稳定好后,将试样放入夹持网内,迅速将夹持网放入浴腔内,同时按 下“试验”键,这时试验指示黄灯亮。 (9)等达到设置的时间后,蜂鸣器开始蜂鸣,提示试验结束,黄灯灭。按“确认” 键,停止蜂鸣,将试样取出,放入常温浴中,试样调节完后,在半小时内对试样进行分析计算。 (10)计算收缩率,用加热前的长度减去加热后的长度值,除以加热前的长度, 再乘以100%,即为该试样的收缩率。 (11)收缩比:等于试样纵、横任一方向收缩率大的值与试样纵、横任一方向收 缩率小的值的比值。
课程设计PLC机械手设计
课程设计任务书 一、设计任务: PLC机械手控制的实现 二、设计要求: 1.阐述机械手的工作原理 2.如何实现PLC对机械手的控制 3.机械手控制程序设计 三、设计期限 年月日至年月日
目录 第一节机械手的工作原理 1.1 机械手的概述 (1) 1.2 机械手的工作方式 (2) 第二节机械手控制程序设计 2.1 输入和输出点分配表及原理接线图 (3) 2.2 控制程序 (4) 第三节梯形图及指令表 3.1 梯形图 (8) 3.2 指令表 (9) 总结与评价 (10) 参考文献 (11)
第一节机械手的工作原理 1.1机械手的概述 机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。 机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,例如: (1)机床加工工件的装卸,特别是在自动化车床、组合机床上使用较为普遍。 (2)在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械行业中它可以用来组装零部件。 (3)可在劳动条件差,单调重复易子疲劳的工作环境工作,以代替人的劳动。(4)可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。(5)宇宙及海洋的开发。 (6)军事工程及生物医学方面的研究和试验。
1 1.2 机械手的工作方式 机械手电气控制系统,除了有多工步特点之外,还要求有连续控制和手动控制等操作方式。工作方式的选择可以很方便地在操作面板上表示出来。当旋钮打向回原点时,系统自动地回到左上角位置待命。当旋钮打向自动时,系统自动完成各工步操作,且循环动作。当旋钮打向手动时,每一工步都要按下该工步按钮才能实现。以下是设计该机械手控制程序的步骤和方法。 1、机械手传送工件系统示意图,如图1所示。 图1 机械手传送示意及操作面板图
会计制度设计—实验报告
实验报告课程实验名称:会计制度设计实验 学生姓名: 学号: 班级:会计 专业:会计学 指导教师:张帆帆 2012年9月
实验一会计机构及会计人员分工的设计实验 一、实验项目:会计机构及会计人员分工的设计实验 二、实验目的:通过实验资料了解光明机械股份有限公司进行会计核算应该设置的会计机构和各会计岗位的人员分工,熟悉光明机械股份有限公司的会计核算环境,掌握一般企业(如光明机械股份有限公司)财务部门的内部机构的设置及其会计人员的分工安排。 三、实验时间:课内2小时,课外3小时 四、实验内容和要求: 根据光明机械股份有限公司的资料,结合所学的会计专业知识,在充分调研的基础上,设计光明机械股份有限公司会计机构的总体架构(要求包括基本财务会计核算、成本管理、财务管理和车间会计核算等具体机构与岗位);根据实验资料要求,对各具体会计核算科、成本管理科、财务管理科和车间会计核算机构所需会计人员进行合理岗位分工。 五、实验资料:(见附件) 六、实验步骤与要求: 1、根据实验资料提供的情况设计光明机械股份有限公司的整体会计组织机 构; 2、设计包括会计核算科(视情况由自己决定分设哪些)、成本管理科、财务 管理科和车间会计等具体核算机构在内的各个会计工作岗位; 3、运用流程图方法设计光明机械股份有限公司会计机构的组织架构图; 4、运用文字说明法描述各个具体会计核算科、成本管理科、财务管理科和车 间会计核算机构的岗位设置原则。 七、实验结果: 实验完成提交(实验报告需打印): 1、光明机械股份有限公司的会计机构组织架构流程图; 2、光明机械股份有限公司的各个具体会计核算科、成本管理科、财务管理科 和车间会计核算机构的岗位设置情况说明书。
机电一体化技术实验报告材料(手写)
实验一四节传送带控制 一、实验目的 1.掌握传送指令的使用及编程 2.掌握四节传送带控制系统的接线、调试、操作 三、面板图 四、控制要求 1.总体控制要求:如面板图所示,系统由传动电机M1、M2、M3、M4,故障设置开关A、 B、C、D组成,完成物料的运送、故障停止等功能。 2.闭合“启动”开关,首先启动最末一条传送带(电机M4),每经过1秒延时,依次启动一条传送带(电机M3、M2、M1)。 3.当某条传送带发生故障时,该传送带及其前面的传送带立即停止,而该传送带以后的待运完货物后方可停止。例如M2存在故障,则M1、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。 4.排出故障,打开“启动”开关,系统重新启动。 5.关闭“启动”开关,先停止最前一条传送带(电机M1),待料运送完毕后再依次停止M2、M3及M4电机。
五、功能指令使用及程序流程图 1.传送指令使用 X0000为ON时,将源容向目标容传送,X0000为OFF时,数据不变化。 2.程序流程图 六、端口分配及接线图 序号PLC地址(PLC端子)电气符号(面板端 子) 功能说明 1X00 SD 启动(SD) 2X01 A 传送带A故障模拟3X02 B 传送带B故障模拟4X03 C 传送带C故障模拟5X04 D 传送带D故障模拟6Y00 M1 电机M1 7Y01 M2 电机M2 8Y02 M3 电机M3 9Y03 M4 电机M4 10主机COM、面板COM接电源GND 电源地端 11主机COM0、COM1、COM2、COM3、COM4、COM5、 接电源GND 电源地端 12面板V+接电源+24V 电源正端2.PLC外部接线图
(整理)PLC课程设计题目及要求.
1.电动机顺序的控制 要求:按下启动按钮后,电动机M1运转10S, 停止5S, 电动机M2与M1相反,即M1停止时M2运行,M2运行时M1停止,如此循环往复,直至按下停车按钮。 2.喷泉的控制 要求:有A、B、C、三组喷头,启动后:A组先喷5S;然后B、C同时喷,A停;5S后B 停;再5S后C停,而A、B又喷;再2S,C也喷;持续5S后全部停喷。再过3S重复前述过程 3.压力机控制 要求:压力机冲头停在上方原始位置,行程开关SQ1被压下,其常开触点闭合。按下启动按钮,其常开触点通电一次,液压电磁阀YV1接通,冲头下行。当冲头接触工件后压力迅速升高,压力继电器SP压力值达到预定值后,其常开触点闭合。保压5S,接通电磁阀YV2。冲头上升,返回原始位置再压住行程开关SQ1,冲头停止上升,按上述控制要求设计。 4.液压滑台自动循环运动控制 要求:液压滑台循环工作过程为预备、快进、工进、停留和快退五个工步,分别利用1000~1005作为各步的工进继电器,各工步转换条件由外设SB、SQ1、SQ2、SQ3和压力继电器SP提供,对应各步的动作作为驱动电磁阀YV1、YV2和YV3的线圈。 5.* 物料传送系统的控制 在自动物流生产线上,一般通过加工、检侧、包装等工位的传送带来运送加工的工作。 每套传送系统由不同电机控制,为节能运行,没有工件的传送暂不运行,检测到工件则启动传送带,工件到达传送带的尾端,启动下条传送带,如果前条传送带没有工件则停止运行。 动作要求:按启动按钮后加工工位的传送带开始运行,有工件运行到传送带的尾部时传感器动作,启动检测工位的传送带,再传送到尾部时传感器动作,启动包装工位传送带,该传送带启动2S后,前条传送带没有工件则停止运行。传感器检测到工件到位置3S后,若前条传送带没有工件停止运行。 6. 工业自动清洗机的控制 在工业现场有一种自动清洗机,工作时将需要清洗的部件放在小车上,按启动按钮后小车自动进入清洗池指定位置A,首先加入酸性洗料,小车再继续前行到另一位置B,然后返回到位置A,打开排酸阀门将酸性洗料放出,完成一次酸洗后。再加入碱性洗料,清洗过程同酸洗。等碱性洗料完全放出后,小车从位置A回到起始位置,等待下次启动信号。 动作要求:该清洗设备的小车前进后退通过电动机的正反转控制,酸性洗料的碱性洗料通过两个泵分别注入,通过打开电磁阀排放洗料,再这里洗料的注入和放出都通过时间控制,实际的清洗也可以用液位开关控制。 7.升降控制系统 有一个升降控制系统。在自动控制时,要求上升10S,停5S,下降10S,停10S,往复循环10次后停止运行。 8.车库自动门的控制系统 汽车到达车库门前,超声波开关接收到来车的信号,门电动机正传,门上升,当门上升到顶点碰到上限开关时,停止上升,汽车驶入车库后,光电开关发出信号,门电动机反转,门下降,当下降到下限开关后门电动机停止。
海南大学plc实验报告
电气控制及可编程序控制器技术 实验一电机正反转控制 一、实验目的 1.学习和掌握PLC的实际操作和使用方法; 2.学习和掌握PLC控制三相异步电动机正反转的硬件电路设计方法; 3.学习和掌握PLC控制三相异步电动机正反转的程序设计方法; 4.学习和掌握PLC控制系统的现场接线与软硬件调试方法。 二、实验设备 主机模块,电源模板,电机正反转控制实验板,开关、按钮板,连接导线一套。三、实验原理 三相异步电动机定子三相绕组接入三相交流电,产生旋转磁场,旋转磁场切割转子绕组产生感应电流和电磁力,在感应电流和电磁力的共同作用下,转子随着旋转磁场的旋转方向转动。因此转子的旋转方向是通过改变定子旋转磁场旋转的方向来实现的,而旋转磁场的旋转方向只需改变三相定子绕组任意两相的电源相序就可实现。 四、控制要求 1、初始状态 接触器KM1、KM2都处于断开状态,电机M1处于停止状态。 2、启动操作 (1) 正转控制 按下电机正转按钮SB2,KM1闭合,电机M1正转;按下按钮SB1,电机停止运行。 (2) 反转控制 按下电机反转按钮SB4,KM2闭合,电机M1反转;按下按钮SB1,电机停止运行。 (3) 正反转切换控制 当电机正转时,按下按钮SB4,KM1断电,KM2闭合,电机M1反转。 当电机反转时,按下按钮SB2,KM2断电,KM1闭合,电机M1正转。 3、停止操作 按下停止按钮SB1,电机M1无论在何种状态电机都将停止运行。 4、过载保护
当电机过载时(按下按钮FR1),电机停止运行。 五、输入输出分配 1、输入 SB1——X001(停止按钮) SB2——X002(电机M1正转按钮) SB4——X004(电机M1反转按钮) FR1——X005(热继电器保护) 2、输出 KM1——Y001(电机正转接触器) KM2——Y002(电机反转接触器) 六、实验程序 1.梯形图程序 2.指令表程序
电视教材设计与制作实验报告
心之所向,所向披靡 江西科技师范大学 实验报告 课程电视教材设计与制作 院系教育学院 班级09教育技术学(1)班 学号20092299 姓名ljh 报告规格 一、实验目的 二、实验原理 三、实验仪器四、实验方法及步骤 五、实验记录及数据处理 六、误差分析及问题讨论
目录 1. 电视手法与分镜头稿本 2. 电视教材拍摄用光 3. 摄像与录像 4. 特技与动画制作 5. 编辑电视教材 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 每次实验课必须带上此本子,以便教师检查预习情况和记录实验原始数据。 实验时必须遵守实验规则。用正确的理论指导实践袁必须人人亲自动手实验,但反对盲目乱动,更不能无故损坏仪器设备。 这是一份重要的不可多得的自我学习资料袁它将记录着你在大学生涯中的学习和学习成果。请你保留下来,若干年后再翻阅仍将感到十分新鲜,记忆犹新。它将推动你在人生奋斗的道路上永往直前!
实验一电视手法与分镜头稿本 一、实验课程名称 教育电视节目制作 二、实验项目名称 电视手法与分镜头稿本 三、实验目的和要求 进行电视分镜头稿本的创作 四、实验内容和原理 在选题基础上打好制作基础,创作分镜头剧本。 五、主要仪器设备 创意室 六、操作方法与实验步骤 1、讨论电视手法与分镜头稿本。 七、实验结果与分析、心得 以小组为单位进行讨论选题,每组成员进行分工安排,在分好各自工作的基础上,总结了“八字选题包装法”,即“欲、画、人、情、事、新、美、深”。并且讨论出了各个分镜头的内容,完成了分镜头稿本的创作。
实验二电视教材拍摄用光 一、实验课程名称 教育电视节目制作 二、实验项目名称 电视教材拍摄用光 三、实验目的和要求 熟悉电视教材拍摄中光线的使用。 四、实验内容和原理 在室内外进行布光并进行拍摄。 五、主要仪器设备 摄像机 六、操作方法与实验步骤 1、在室外进行布光拍摄。 2、在室内进行布光拍摄。 七、实验结果与分析、心得 通过查找一些资料及在老师的指导下,熟悉电视教材拍摄中光线的使用,学会了在室内外进行布光拍摄。
机器人实验报告
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
plc机械手课程设计
p l c机械手课程设计Last revision on 21 December 2020
目录 1 2 (4) 3 (4) 4 PLC及机械手的选择和论证 (6) PLC的结构及基本配置 (6) PLC的选择及论证. (7) 6 软件电路设计及描述 1引言
在现代工业中,生产过程的机械化,自动化已成为突出的主题。化工等连续性生产过程的自动化已基本得到解决。但在机械工业中,加工、装配等生产是不连续的。专用机床是大批量生产自动化的有效的办法;控制机床、数控机床、加工中心等自动化机械是有效地解决多品种小批量生产自动化的重要办法。但除切削加工本身外,还有大量的装卸、搬运、装配等作业,有待于进一步实现机械化。据资料介绍,美国生产的全部工业零件中,有75%是小批量生产,金属加工生产批量中有四分之三有50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。从这里看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而生产的。并且在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。自从机械手问世以来,相应的各种难题迎刃而解。机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。 可编程控制器是继电器控制和计算机控制出上开发的产品,逐渐发展成以微器处理为核心把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置。 机械手采用plc控制,具有可靠性高,改变程序灵活等优点。无论进行时间控制还是控制或混合控制,都可以通过设置plc的程序实现。可以根据机械手的动作顺序改变程序,是机械手通用性更好。 采用气压传动,动作迅速,反应灵敏,能实现过载保护,便于自动控制。工作环境适应性好。阻力损失和泄露减少。不会污染环境,造价低。 在彩电、冰箱等家用电器产品的装配生产线上,在半导体芯片、印刷电路等各种电子产品的装配流水线上,不仅可以看到各种大小不一、形状不同的气缸、气爪,还可以看到许多灵巧的真空吸盘将一般气爪很难抓起的显像管、纸箱等物品轻轻地吸住,运送到指定目标位置气动机械手被广泛应用于汽车制造业、半导体及家电行业、化肥和化工,食品和药品的包装、精密仪器和军事工业等。 2 设计目的及主要内容 设计目的 1、培养plc设计能力; 2、扩展知识结构; 3、培养综合运用能力; 4、是课堂教学的有益补充。通过本次课程设计,进一步加强自己对机械手和PLC的认识,以及它们在生活中广泛应用。 主要内容 1.正确选用机械手和PLC类 2.绘制I/O分配 3.设计梯形图 4.指令语句 5.模
plc实验报告4个
大学PLC实验报告 学院: 班级: 学号: 姓名: 日期:2014
实验一智能抢答器控制 一、实验目的 用PLC构成抢答器控制系统 二、实验内容 1.控制要求 3人的抢答控制。当主持人宣布开始时,各选手开始抢答,当某一选手最先抢答到时,其指示灯亮,同时其他选手不能抢答,只到主持人复位,才可以重新抢答。 2.被控对象 4 . 接线
5、状态时序图
6、调试过程 分别按下各选手的抢答按钮,观察是否可屏蔽其他两位选手的抢答要求,按主持人复位键,互锁是否消除,是否可重新抢答。 三、实验结论 以互锁的原理实现各选手抢答的唯一性。并能很好的利用常闭开关的特性实现主持人的复位操作。 四、实验心得 在实现自身抢答的同时,还要屏蔽其他选手的抢答,所以必须应用到互锁。同时主持人复位键以常闭开关实现个各选手的复位。 实验二轧钢机生产线控制 一、实验目的 1.掌握PLC的编程软件平台及位逻辑、定时器、计数器、中断等指令的编程方法 2.掌握PLC下位机与PC上位机通讯、软件调试的方法 3. 设计出轧钢机生产线的电气接线图和PLC控制程序 二、实验内容 (一)控制功能要求 1.无限循环轧制 (1)按下启动按钮,系统运行。 (2)按下外扩按钮K1,电机M1,M2运转,传送带1运转。当检测到传送带1有钢板 时,钢板检测传感器SP1为ON(按下SP1按钮来模拟检测传感器常开接点闭合),同时电机M3,M4旋转,传送带2运转,经4S后钢板传送到初轧轧辊位置时,电磁阀YV1为ON,并初轧3S。 (2)当钢板到达传送带2位置时,钢板检测传感器SP2为ON(按下SP2按钮模拟检 测传感器),同时电机M1,M2停止运转、传送带1也停止运转、电机M5运转、传送带3运转,经4S钢板传送到精轧轧辊位置,电磁阀YV2为ON,精轧2S后,钢板传送到传送带3,钢板检测传感器SP3为ON(按下SP3按钮模拟检测传感器),这时电机M3,M4停止,M5运转。再实现无限循环轧制功能。 2. 计数轧制控制 按下外扩按钮K2,按照上述顺序进行计数轧制,用计数器记录循环轧制次数,2次后停止计数轧制,计数器清零 3. 按下停止按钮,整个系统停止 (二) 被控对象 被控对象由电机拖动传送带、钢坯、电感式检测传感器、轧机、指示灯、按钮等组成,本控制将钢坯通过初轧和精轧两个过程,轧制成2mm厚的薄钢板产品,供给生产单位使用,每循环一次轧制出一张薄钢板产品,示意图如下所示。
运输包装设计实验报告(学生用)
运输包装设计实验报告(学生用) 运输包装设计实验报告 课程名称: 专业班级:姓名: 学号: 指导教师: 实验日期: 实验一运输包装有限元仿真分析实验 学生姓名实验项目□必修□选修□演示性实验□验证性实验□操作性实验□综合性实验实验地点指导教师学号成绩:一、实验目的及要求 1、目的 (1)学习并掌握有限元分析软件的使用方法。 (2)学会用有限元分析软件建立产品运输包装的有限元模型。(3)学会运输包装有限元仿真分析。 2、内容及要求模拟实际运输过程中的产品建立有限元模型,并进行仿真分析。二、实验仪器 计算机,有限元分析软件 三、实验方法与步骤
1.准备工作:熟练掌握有限元分析软件ABAQUS的使用,收集所分析产品及其运输包装材料的各项力学性能指标,为建立有限元模型奠定基础。 2.实验方法: (1)前处理:(FEA建模) (2)求解:运输包装件静态、动态有限元分析求解(3)后处理:查看运行结果,进行结果分析。四、实验结果与数据处理实验二运输包装件堆码实验 学生姓名实验项目□必修□选修□演示性实验□验证性实验□操作性实验□综合性实验实验地点一、实验目的 1.掌握对运输包装件采用压力试验机进行堆码试验的方法。 2.学会使用堆码实验评定运输包装件在堆码时的耐压强度及对内装物的保护能力。 3.研究包装件受压影响(变形、蠕变、压坏或破裂)的因素。 4.学会GB 3538 运输包装件各部位的标示方法 5.学会GB4857.2 运输包装件基本试验温湿度调节处理方法 二、实验原理 将包装件置于压力试验机的下压板上,然后将上压板下降,对包装件施加压力。所加压力、大气条件、持续时间、承受压力的情况以及包装件的放置状态,按预定方案进行。
PLC课程设计机械手电气控制系统设计
《PLC技术与工程应用》课程设计任务书 课题名称:机械手电气控制系统设计 专业班级:电气自动化技术102班 河南机电高等专科学校自动控制系 2012-06-01
1、概述 机械手是工业生产过程中常见的自动化设备,它具有工件的自动取拿、移动和输送功能。机械手机构控制涉及了PLC、传感器、电机驱动等技术。 机械手实验设备如图1所示。该设备可以实现手臂的左右摆动、伸出与退回、上下移动、机械手指的夹紧与张开等四自由度动作。 图1. 机械手实验设备 1.1 输出驱动单元 该设备四自由度动作由四台直流电动机驱动,每台电动机可进行正反转运行。左右摆动由齿轮组啮合实现减速传动;伸出与退回、上下移动由直流减速电机驱动丝杠--螺母结构完成;机械手指的夹紧与张开由直流减速电机驱动连杆结构实现。该设备共有8个动作,由控制器输出信号驱动。 1.2 输入检测单元 每个自由度运行极限位置设置了两个行程开关,用于判断当前动作是否到
位。该设备共有8个行程开关作为控制器的输入信号。 2、输入输出接口电路介绍 机械手实验设备既是所谓控制对象,对于一般工业控制,其控制核心使用可编程控制器(PLC)。设计输入输出接口电路 (如图2所示) 的目的是为解决机械手设备输出驱动单元、输入检测单元与PLC之间的信号接口问题。图中上层电路板是驱动电路板,下层电路板左侧是输入接口电路板,右侧是输出接口电路板。 图2. 输入输出接口电路板 2.1 输入接口电路板 输入接口电路板原理图如图3所示,其功能是将设备上行程开关的开关状态转换为统一的电平信号(逻辑1:24V DC ;逻辑0:0V DC)。板上设有光电隔离电路,将内外电源隔离,以保护设备安全。 图3. 输入接口电路板电气原理图
PLC实验报告03146
物流自动化PLC实验报告姓名:伍颖 学号: 8 班级:流134 班 电话: 安徽工业大学管理科学与工程学院 编写:陈彬徐斌暴伟 2015年5月
一、实验设备 PC机一台,可编程控制器实验系统一套,编程电缆一根,导线若干 二、PLC实验系统的组成 可编程序控制器(简称PLC)在进行生产控制或实验时,都要求将用户程序的编码表送入PLC的程序存贮器,运行时PLC根据检测到的输入信号和程序进行运算判断,然后通过输出电路去控制对象。因此典型的PLC系统由以下三个部分组成:PLC主机,输入/输出接口,编程软件。 在我们的可编程控制器实验系统中,选用的PLC主机是SIMATIC S7-200 CPU222,有8个输入点,6个输出点,可采用助记符和梯形图两种编程方式. 使用S7-200的编程软件STEP 7-Micro/WIN,可以在计算机屏幕上直接生成和编辑梯形图或指令表程序,程序被翻译后下载到PLC。可以将PLC中的程序上载到计算机,还可以用STEP 7-Micro/WIN监控PLC。一般用USB/PPI编程电缆来实现编程计算机与PLC的通信。 输入接口:将输入接口的相应端口,根据需要与按钮用双头线相连即可。按钮的一端、PLC的公共端已经接好。这样,当按下按钮时,相应端口的输入指示灯就会点亮,表示有输入到PLC。 输出接口:将输出接口的相应端口,根据需要与指示灯或电机接口用双头线相连即可。指示灯的一端、PLC的公共端已经接好。这样当PLC的相应的输出端口有输出时,所接的发光二极管点亮。 可编程控制器实验系统面板布置示意图如图1-2所示 在图 DC24V和DC5V 16个输入14个输出。 是输入控制端1M、2M与输入端的对应关系。 表1-1