一种改进的RA译码算法
第33卷第11期电子与信息学报Vol.33No.11 2011年11月 Journal of Electronics & Information Technology Nov. 2011
一种改进的RA译码算法
张敬毅*金明录
(大连理工大学电子信息与电气工程学部大连 116024)
摘要:重复累积(RA)码译码使用置信传播(BP)算法,具有接近香农限的性能,但校验节点更新时使用复杂的双曲正切函数和反双曲正切函数,算法复杂度较高。为了降低译码算法的复杂度,且具有较好的性能,该文将查表法和分段函数近似法结合起来,提出了一种改进的译码算法。该算法采用分段的一次函数,去近似BP算法检验节点变换化简后的原函数,采用非常小的查找表得到一个校正值,用校正值去修正近似函数和变换化简后的原函数之间的误差,很好地避免了复杂函数的计算,且误差极小。该算法大大降低了译码算法的复杂度,且具有接近BP算法的译码性能。
关键词:重复累积码;置信传播算法;最小和算法;查找表;分段近似函数
中图分类号:TN911.22 文献标识码:A 文章编号:1009-5896(2011)11-2616-07 DOI: 10.3724/SP.J.1146.2011.00324
An Improved Decoding Algorithm of Repeat Accumulate (RA) Codes
Zhang Jing-yi Jin Ming-lu
(Faculty of Electronics and Electrical Engineering, Dalian University of Technology, Dalian 116024, China) Abstract: Belief Propagation (BP) decoding algorithm of Repeat Accumulate (RA) code approaches Shannon limit, but it possesses high complexity because of the use of the complex hyperbolic tangent function and the inverse hyperbolic tangent function at check nodes updating. In order to reduce the complexity with little performance sacrifice, combining the two methods lookup tables and piecewise approximation function, a modified decoding algorithm is proposed in this paper. The algorithm uses piecewise function to approximate the original function, which is obtained by transform and simplify the check node updating of BP algorithm, and use a very small lookup table to get a correction to correct error between the original function and approximate function. It can avoid the complex calculations, and get the minimal error. The algorithm greatly reduces the decoding complexity, and has
a performance close to the BP decoding algorithm.
Key words: Repeat Accumulate (RA) code; Belief Propagation (BP) algorithm; Min-sum algorithm; Look-up table;
Piecewise approximation function
1 引言
在信道编码中,Turbo码[1]的编码算法与码长呈线性关系,但其译码算法复杂。LDPC码[2]的译码算法与码长呈线性关系,但其编码算法与码长呈平方关系,编码算法复杂。由于Turbo 码和LDPC 码的固有缺陷,寻求具有线性编译码复杂度并且接近香农限性能的纠错码成为信道编码研究的热点。
1998年,Divsalar等人[3]提出的重复累积(Repeat Accumulate, RA)码是一种简单的类Turbo 码(Turbo-Like Codes, TLC),同时也是一类特殊的LDPC码。RA码编码器由重复器、交织器、组合器、累加器级联构成。编码和Turbo码类似,而构成后的码字,因为其校验矩阵H是稀疏矩阵,所以也具有LDPC码的特点,可以采用高速并行的置信传播(Belief Propagation, BP)译码算法(即和积算法)进
2011-04-07收到,2011-07-13改回
*通信作者:张敬毅 zhangjingyi131@https://www.360docs.net/doc/003573736.html, 行译码。由于RA码同时具有Turbo码和LDPC码的优点,可以在线性时间内编码和译码,且RA码具有接近香农限的性能[4],RA码成为了信道编码领域研究的热点。受不规则LDPC码的启发,文献[5]提出了一种不规则RA(IRA)码,IRA码具有与不规则LDPC码一样优越的性能,但是编码的复杂度远低于不规则LDPC码。
RA 码的译码算法采用BP译码算法,然而BP 算法进行校验节点更新时需要使用双曲正切函数(tanh)和反双曲正切函数1
(tanh)
?等复杂的运算,算法复杂度大,硬件实现占用资源多,影响了它在实际通信系统中的应用。最小和算法可以用于RA码,虽然复杂度较低,却大大降低了译码性能。
为了降低译码算法的复杂度,同时获得较好的译码性能。很多人对BP译码的简化算法进行了研究,一般采用查找表的方法或是采用简单的分段函数来代替复杂函数的计算。其中文献[6]提出了两种
第11期张敬毅等:一种改进的RA译码算法 2617
简化的方法,分别使用分段函数和查找表的方法对tanh和1
tanh?分别进行近似计算,极大的降低了复杂度。文献[7]对BP算法进行了化简,采用分段函数近似计算,其中的一段函数使用正交的切比雪夫多项式进行近似计算,另一段使用一条直线代替,大大降低了BP算法的复杂度,当切比雪夫多项式阶数较高时,译码性能接近BP算法。文献[8]提出了一种基于最小和算法的自适应归一化和偏移算法,该算法利用校验节点的状态信息自适应地选择压缩因子来降低最小和算法带来的误差,译码性能有了较大提高,但也带来了复杂度的提高。
本文提出一种改进的BP译码算法,将查找表与分段函数近似的方法结合起来,得到了更好的效果,降低了算法复杂度,同时得到了较好的译码性能。采用分段的一次函数去近似BP算法变换化简后的原函数,同时采用查表方法得到一个校正值,用校正值去修正近似函数和变换化简后的原函数之间的误差。由于使用一次函数代替了复杂的tanh和1
tanh?函数,且校正值的查找表非常小,该算法大大降低了译码算法的复杂度,且减少了硬件实现时的资源占用,仿真分析表明该算法具有接近BP算法的译码性能。
2 RA译码算法
2.1 BP算法
BP算法[9]是在对数域实现的和积算法,边上传输的是对数似然比信息,根据节点的软判决信息进行译码。校验矩阵H在编码时已经确定,校验矩阵中的1代表边,在边信息的帮助下,可以进行译码操作。译码前,使用信道观测的似然比信息初始化变量节点;然后根据校验关系,初始化信息在校验节点和信息节点间反复传递进行迭代计算;当达到最大迭代次数或是迭代停止的条件时,迭代信息趋于收敛,根据得到的对数似然比信息进行软判决,就可以得到发送的信息序列。
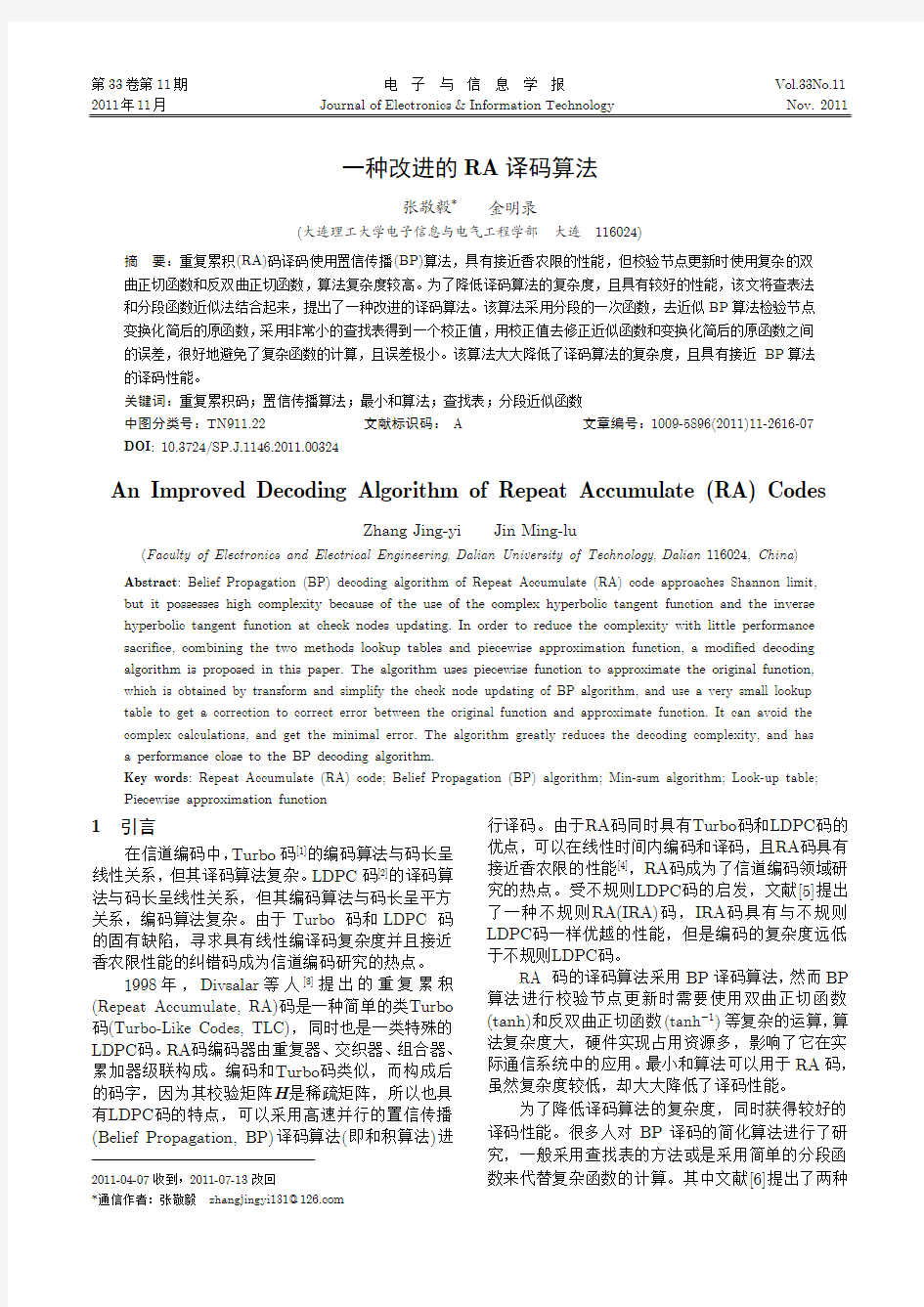
图1是一个(6,2) RA码的Tanner图表示,其码长为2,重复次数3
q=,交织图样{1,2,5,3,4,
π=
6},对于任意的校验节点满足这样的约束关系:与校验节点相连接的所有变量节点传到校验节点的信息的奇偶校验和为0。
如图1所示,u代表信息节点,c代表校验节点,y代表奇偶节点,e代表边。定义[,]
m y c为奇偶节点y到校验节点c的边上所传输的信息;[,]
m u c为信息节点u到校验节点c的边上所传输的信息;[,]
m c y为校验节点c到奇偶节点y的边上所传输的信息;[,]
m c u为校验节点c到信息节点u的边上所传输的信息。
图1 (6, 2) RA码的Tanner图
在BP译码算法中,边所传递的信息是与变量节点相关位的对数似然比信息,对于任意的对数似然比信息可由
01
ln(/)
p p表示,其中0p代表0的概率,1
p代表1的概率,满足011
p p
+=。BP译码算法一个最重要的性质就是信息传递计算时只计算外信息。
对于加性高斯白噪声信道(AWGN),每一个从信道接收的码位的信道观测值的对数似然比信息可
表示为
2
(0|)2
()ln
(1|)
r
r
p x y
B y y
p x yσ
=
==
=
,其中x为位节
点的值,
r
y为信道接收值,σ为信道中高斯白噪声的方差。
规则RA码的BP译码算法如下:
(1)初始化[,],
m u c[,],
m c u[,],
m y c[,]
m c y,将他们置为零。
(2)更新[,]
m y c
() ,
[,]
()[,],,(,)
qn
B y y y
m y c
B y m c'y c'c c'y E
?=
??
=?
?+≠∈
???
(1)
(3)更新[,]
m u c
[,][,] , , (,)
c'
m u c m c'u c'c u c'E
=≠∈
∑(2)
(4)更新校验节点[,]
m c y和[,]
m c u
1
[,],
[,][,] [,]=2artanh tanh tanh ,
22
(,), (,),
m u c c c
m u c m y'c
m c y
u c y'c E y y'
?=
??
??
???
????
??
???
???
???
?????
??
???
?
????
??
??
?∈≠
???
(3)
1
[,],
[,][,] [,]=2artanh tanh tanh ,
22
(,),(,),
m y c c c
m y c m y'c
m c u
y c y'c E y y'
?=
??
??
???
????
??
???
???
???
?????
??
???
?
?????
??
??
?∈≠
???
(4) tanh()x为双曲正切函数,
1
tanh(/2)
1
x
e
x
e
?
=
+
。
(5)循环执行(2)-(4),当0
Hu=
或是迭代次数最大时,迭代停止。
(6)对每个信息节点u U
∈,计算
2618 电 子 与 信 息 学 报 第33卷
()[,]c
s u m u c =∑ (5)
如果()0s u ≥,信息位u 译码值为0,否则为1。
从式(3)和式(4)可以看出,BP 译码算法虽然具有接近香农限的译码性能,但是在校验节点更新时需要使用双曲正切函数tanh 和反双曲正切函数1tanh ?等复杂的运算,硬件实现时占用大量的资源,
算法的复杂度高。
2.2 最小和算法及其改进算法
在LDPC 码的译码算法中利用最小和译码算法来简化复杂的tanh 及1tanh ?函数以达到降低算法复杂度的要求。由于RA 码也具有稀疏的校验矩阵,是一种特殊的LDPC 码,其译码算法与LDPC 码类似,因此最小和译码算法可用于RA 码的译码[8]。按照最小和译码算法的要求,我们对校验节点的更新信息m [c ,y ]和m [c ,u ]进行近似[10],则更新准则变为
[,]sgn([,])sgn([,])
min([,],[,])
m c y m u c m y'c m u c m y'c ≈??
(6)
[,]sgn([,])sgn([,]) min([,],[,])
m c u m y c m y'c m y c m y'c ≈?? (7)
从式(6)和式(7)可以看出最小和译码算法大大的简化了BP 译码算法,不再使用复杂的tanh 及其1tanh ?函数,仅需要求最小值运算和符号相乘运算,
求最小值运算可以通过加法运算实现,符号相乘运算可以化为模2和运算。最小和算法大大降低了算法的复杂度,但对性能分析可知译码性能也有了较大的降低,是以性能的下降为代价的。
分析最小和算法带来误差的原因,有学者提出了归一化和偏移算法,来减小最小和算法的误差。文献[8]在此基础上,提出了自适应的归一化和偏移算法,根据校验节点的状态信息来自适应地选择压缩因子,νρ,但是文献中为了运算的简单,使用了固定的压缩因子。本文使用码长为4096的规则RA 码,采用BPSK 调制,迭代100次对自适应的归一化和偏移算法进行了仿真,其中参数为(,)(18μν= /20,18/21), (,)(3/16,1/4)?ρ=。
3 改进的BP 译码算法
3.1 基于查找表的改进译码算法
首先对BP 译码算法的校验节点更新准则进行分析,这里以校验节点信息[,]m c u 的更新准则式(4)为例,存在如下关系:
[,][,] [,] sgn sgn sgn 222m c u m y c m y'c ???????????=???????????????? (8) |[,]||[,]|ln tanh ln tanh 22
|[,]| ln tanh 2
m c u m y c m y'c ????????=????????????????+?????? (9) 取(1)()ln tanh(/2)ln (1)x x e f x x e ??+???=?=???????
,可以看出 1()f x ?()f x =,所以校验节点的信息更新关系可化为
[,]sgn([,])sgn([,])
((|[,]|)(|[,]|))m c u m y c m y'c f f m y c f m y'c =??+ (10)
同理,式(3)变为
[,]sgn([,])sgn([,])
((|[,]|)(|[,]|))m c y m u c m y'c f f m u c f m y'c =??+ (11)
从式(10),式(11)可以看出,可以使用函数()f x 代替tanh 和1tanh ?函数来进行校验节点的更新。函数()f x 由于存在对数和指数运算,在算法实现时,多使用查表法。为了降低算法的复杂度,使用非均匀量化的方法对函数()f x 进行查表,由于算法只需一个非均匀的查找表,相对于BP 译码算法,算法复杂度有了较大的降低。
()f x 函数如图2所示,可以看出,当x 趋近于0时函数值趋向于无穷大值,当x 趋向于无穷大时函数值趋向于0; x 从小到大函数值变化越来越慢,所以量化间距也应该从小到大越来越大。按照函数值的变化快慢对函数进行分段,每一个小的分段内采用均匀量化的方法。查找表的量化如表1所示。
对不同大小的查找表算法进行计算机仿真分析,在高斯白噪声信道下,对RA 码进行BPSK 调制,编码数据长度为4096,重复次数为3,译码器的最大迭代次数为100。仿真结果如图3所示。
从仿真图中可以看出,()f x 函数非均匀量化的查找表算法表格大小为2048时,性能较好,接近BP 算法的性能。查找表大小为2048和1024时,译码性能要优于自适应的偏移算法和自适应的归一化算法。查找表表格越大,译码性能越好,但占用的硬件资源越多,算法的复杂度也越大。随着查找表的减小,当表格大小为512的时候,译码性能与
BP
图2 f (x )函数图形
第11期 张敬毅等: 一种改进的RA 译码算法 2619
表1 数据分度及其各段的均匀量化数目
x 分段情况
0-0.01 0.01
-3 3-6 6-10
2048 200 1200 600 48
1024 100 600 300 24 512 20 320 160 12 表格大小
256
10
160
80
6
图3 不同大小的查表法性能比较
算法相比有0.15 dB 的降低,但是与最小和算法的
性能相比仍有0.15 dB 的提高。当表格规模继续减小为256时,译码性能出现了较为明显的恶化。基于查找表的改进BP 译码算法相比BP 算法有了较大的算法复杂度的降低,实现了性能和复杂度的折中。
3.2 基于分段函数近似的改进算法
文献[7]中提出了一种基于分段函数近似的改进译码算法,也叫CPF-BP 算法。该算法采用切比雪夫多项式拟合的方法,用分段函数去近似化简后的原函数,可以看出多项式的阶数越高,越接近BP 算法的性能。但是阶数越高,译码算法复杂度也越高。采用文献中的结果,本文使用二阶的切比雪夫多项式,其中系数20.057281b =, 10.114562b =, 00.66771b =,对RA 码进行了仿真,这里采用BPSK 调制,编码数据长度为4096,重复次数为3,译码器的最大迭代次数为100。
3.3 一种基于查找表与分段函数相结合的改进译
码算法
由以上可以看出,基于查找表和基于分段函数的算法各有优点,查找表实现简单,但是要达到较好的性能,需要较大的查找表,而分段函数近似的方法得到较好的性能,需要二阶以上的近似函数。为了显著降低算法的复杂度,同时获得较好的译码性能,本文利用查表和分段函数近似两种方法的优点,提出了一种分段函数近似,查找表矫正误差的改进译码算法。
首先对于校验节点更新的准则进行分析,以[,]m c u 的信息更新准则为例。首先对校验节点的更
新进行变换,将tanh()x x
x
x
e e x e e
???=+与1tanh ()x ?= 11ln 21x x ?+?????
????函数代入式(4),得 111([,][,])([,][,])2211([,][,])[,][,])22[,][,][,]2tanh tanh tanh 22 ln ln m y c m y'c m y c m y'c m y c m y'c m y c m y'c m y c m y'c m c u e e e e ????+?+????????????=???????????????
???????=+?????????????+??????
(12)
进行参量的替代,设[,][,],m m y c m y'c =? n =
[,][,]m y c m y'c +,式(12)可化为
/2/2/2/2[,]ln()ln()m m n n m c u e e e e ??=+?+ (13) 设函数/2/2()ln()m m g m e e ?=+,所以式(13)可以化为
[,]()()m c u g m g n =? (14) 即校验节点的更新准则可用式(14)进行代替。容易看出()g m 函数为偶函数,所以对它进行分析时只讨论0m ≥的情况。
分析原函数的曲线,如图4,可以看出当m 趋于无穷大时,变换化简的原函数无限接近()f m = /2m 这条直线,但是由于在m 较小时,原函数与()/2f m m =差值较大,使用差值矫正也需要量化阶数较大时才能使误差较小。所以当m 较小时,采用另外一条直线。这里以/2/2()ln()m m g m e e ?=+函数在零点时的值作一条水平直线,以水平直线和直线()/2f m m =作为分段的一次函数,也就是近似函数,分段点为两条直线的交点。可以看出误差最大的值位于交点处,对误差的幅度进行等分量化,做一个矫正误差的查找表。
如图4所示,原函数曲线为BP 算法校验节点更新准则经过变换化简后的函数,即()g m = /2/2ln()m m e e ?+,分段近似函数是本文中提出的近似函数,误差值曲线表示原函数与近似函数之间的误差。改进的方法使用近似函数去逼近原函数,采用查表的方法得到一个校正值,来修补近似函数与原函数的差值。可以看出近似函数为一个两段的分段函数,且均为直线,也就是为一次函数。查找表根据最大幅度值进行等分量化,从上面的分析可知查找表越大,校正值越准确,误差也就越小。
原函数可以通过近似函数逼近,校正值矫正误差来近似求解,函数式就可以变为
/2/2()ln()=()0.6931, 1.3862 /2, 1.3862m m g m e e p m c
c m m c m ?=++?+≤??=??+>???
(15)
2620 电 子 与 信 息 学 报 第33卷
图4 变换化简后的原函数与近似函数的比较
其中()g m 为原函数,()p m 为近似函数,
c 为校正值。c 通过查表获得,本文使用的查找表如表2所示。
表2 校正值c 的查找表
m c [0.4742,0.6741)[2.8580,3.5652) 0.0279
[0.6741,0.8295)[2.4385,2.8580) 0.0558
[0.8295,0.9623)[2.1365,2.4385) 0.0837
[0.9623,1.0809)[1.8991,2.1365) 0.1116
[1.0809,1.1896)[1.7025,1.8991) 0.1395
[1.1896,1.2908)[1.5340,1.7025) 0.1674
[1.2908, 1.5340) 0.1953
其他 0
由以上分析可得,将式(11)应用于BP 算法校验节点中,可以避免对复杂函数tanh 和1tanh ?的计算。由图4可以看出,近似的函数加上校正值会非常接近原函数的值,误差会降的非常小,所以这种近似方法对算法的译码性能影响比较小。有以上的分析,校验节点信息[,]m c y 和[,]m c u 的更新准则变为
[,]()()0.6931, 1.3862()()/2, 1.3862m c y g m g n c m g m p m c m c m ?=???????+≤????=+=????+>??????
(16) 其中[,][,],[,][,]m m u c m y'c n m u c m y'c =?=+。
[,]()()0.6931, 1.3862()()/2, 1.3862m c u g m g n c m g m p m c m c m ?=???????+≤????=+=????+>??????
(17) 其中[,][,],[,][,]m m y c m y'c n m y c m y'c =?=+。
本文提出的改进算法的校验节点更新使用式(16),式(17)代替BP 译码算法中的式(3),式(4),很好地避免了复杂的tanh 和1tanh ?函数的计算,通过使用一次分段函数近似和一个很小的查找表得到的校正值来进行误差矫正,用这样的方法进行校验节点的更新,极大地降低了算法的复杂度。
4 仿真分析
众所周知,评价一种译码算法好坏最重要的指
标就是算法复杂度和译码性能。首先对不同算法的复杂度进行比较分析,不同译码算法每次进行校验节点更新时的算法复杂度比较如表3所示。从表中可以看出,BP 算法使用了乘法以及复杂的tanh 和1tanh ?函数进行校验节点的更新,对于tanh 和1tanh ?函数硬件实现时算法复杂度最大,占用硬件资源多;而最小和算法进行校验节点更新时,仅仅使用4次加法,算法复杂度最低,改进的最小和算
法需要4次加法,校验节点状态信息判决以及归一化、偏移以及压缩因子的引入带来了算法复杂的提
高,相比最小和算法,复杂度有了较大的提高;基
于查找表的改进算法与BP 算法相比有较大的降低,
但其表格仍然较大,占用硬件资源较多,制约了算
法的应用;对于2阶的切比雪夫多项式CPF-BP 算
法校验节点更新时最多需要14次加法,12次乘法,
相比BP 算法复杂度有了很大的降低;本文提出的
算法更新校验节点时最多需要8次加法,4次乘法
以及2次查表,但校验值c 使用的查找表非常小,加法和乘法运算也较少,所以复杂度很小,低于CPF-BP 算法,略高于最小和算法,大大降低了BP 算法的复杂度。 表3不同算法的复杂度比较
译码方法
加法乘法 tanh
1
tanh
?查找表BP 算法 —
8 4 2 —
最小和算法 4
—
—
— — 改进最小 和算法
4 2 —
— —
查表法改进 算法
4 —
—
— 5 CPF-BP 算法14 12 — — —
本文算法
8 4 —
—
2
在硬件实现时,乘法运算会转换成一些列的加法和位移运算,例如对于0.875与x 的相乘可以化为0.875/2/4/8x x x x ×=++,其中含有2次加法,3次位移运算。相应地,一次乘法运算也就需要一系列的加法器和位移器来实现,占用的硬件的资源也就远多于加法。对于查找表的硬件实现时,查找表越大需要的内存也越大,同时查找算法也会越复杂,非均匀量化的查找算法比均匀量化复杂,查找算法越复杂占用硬件资源越多。BP 算法中,复杂函数tanh 和1tanh ?的实现多采用查表方法,要想不影响函数的精确度需要很大的查找表,占用的内存就多。本文提出的改进算法仅需要8个值的查找表,对于每一个表值使用16位的浮点数表示,校正值的查找表仅需要128 bit 的内存即可,与BP 算法、查找表的改进BP 算法相比所需要的内存大大
第11期张敬毅等:一种改进的RA译码算法 2621
减少,查找算法也得到简化,同时本文提出的算法,使用的加法和乘法算法都较少,硬件资源占用大大减少。
对不同算法的译码性能进行分析,不同算法的译码性能如图5所示。从图中可以看出最小和算法的性能与BP译码算法相比有较大幅度的降低,最小和算法复杂度的降低是以性能的牺牲为代价的,对于那些对译码性能要求不高或是信道质量好的情况下,可以采用最小和算法;基于最小和的自适应归一化和偏移算法与最小和算法相比性能有了较大的提高,但是带来了复杂度的提高,是性能和复杂度的折中。而基于查找表的改进算法当表格大小为2048时,具有较好的译码性能,优于最小和以及最小和的改进算法,但是硬件实现占用资源仍然过多;CPF-BP算法的性能与BP算法相比仅有较小的降低,但低于本文提出的改进算法,要达到更好的性能,需要更高的阶数,但是也会带来复杂度的提高;本文提出的改进算法性能优于CPF-BP算法和改进的表格为2048的查找表算法,性能极其接近BP译码算法,但是与BP算法相比算法复杂度得到了大大的降低。
图5 不同算法的译码性能比较
综上所述,本文提出的分段函数近似、查找表矫正的改进译码算法复杂度远低于BP算法的复杂度,译码性能非常接近BP算法的性能,以尽量小的复杂度得到了较高的译码性能。
5 结论
RA码的BP译码算法译码性能接近香农限,但是由于BP译码复杂度较高,硬件实现占用资源多,算法复杂度高。本文首先对文献[8]中改进的最小和算法进行了分析,性能有了提高但复杂度也较最小和算法有了提高;对基于查表的改进算法进行分析,可以看出改进算法的查找表仍然较大,硬件实现占用资源较多,且译码性能也有一定下降;接着分析了文献[7]中的分段函数近似方法,当近似函数阶数高时能得到接近BP算法的性能,但是复杂度也会
跟着上升。本文提出的改进译码算法,利用查找表
和分段近似两种方法的优点,采用一个分段的一次
函数去近似变换化简后的原函数,采用查表的方法
得到一个校正值,修补近似函数带来的误差,算法
复杂度得到了大大的降低,仅用很小的复杂度获得
了接近BP译码算法的性能,具有较高的理论意义
和实用价值。
参考文献
[1]Berrou C and Glavieux A. Near optimum error correcting
coding and decoding: Turbo-codes[J]. IEEE Transactions on
Communications, 1996, 44(10): 1261-1271.
[2]MacKay D J C. Good error-correcting codes based on very
sparse matrices[J]. IEEE Transactions on Information
Theory,1999, 45(3): 399-431.
[3]Divsalar D, Jin H, and McEliece R. Coding theorems for
Turbo like codes[C]. Proceedings of the 36th Annual Allerton
Conference on Communication Control and Computing,
California USA, 1998: 201-210.
[4]Hemati S, Banihashemi A H. Dynamics and performance
analysis of analog iterative decoding for Low-Density Parity-
Check (LDPC) codes[J]. IEEE Transactions on Communications, 2006, 54(1): 61-70.
[5]Jin H, Khandekar A, and McEliece R. Irregular repeat-
accumulate codes[C]. 2nd International Symposium on Turbo
Codes and Related Topics, Brest, France, September 4-7,
2000: 1-8.
[6]Papaharalabos S, Sweeney P, Evans B G, et al.. Modified
sum-product algorithms for decoding low-density parity-
check codes[J]. IET Communications, 2007, 1(4): 294-300. [7]Li Lei, Wang Qin, and Xu Li. A low-complexity decoding
algorithm for RA code with Chebyshev polynomial fitting[C].
3rd IEEE International Conference on Computer Science and
Information Technology (ICCSIT), Chengdu, China, July
9-11, 2010: 421-425.
[8]Wu Xiao-fu, Song Yue, Jiang Ming, et al.. Adaptive-
normalized/offset min-Sum algorithm[J]. IEEE
Communications Letters, 2010, 14(7): 667-669.
[9]Wang Ying, Xie Lei, Chen Hui-fang, et al.. Near optimal BP
algorithm for LDPC-coded BICM system with EXIT
analysis[C]. 6th International Conference on Wireless
Communications Networking and Mobile Computing (WiCOM), Chengdu, China, Sept. 23-25, 2010: 1-4.
[10]Abdelhedi M, Hamdi O, and Bouallegue A. A-min algorithm
using TAP approach[C]. Proceedings of the 4th International
Symposium on Communications, Control and Signal
Processing (ISCCSP), Limassol, Cyprus, March 3-5, 2010:
1-5.
张敬毅:男,1987年生,硕士生,研究方向为重复累积码的编译码算法研究.
金明录:男,1958年生,教授,博士生导师,研究方向为信号与通信系统的基础理论和技术.
一种基于图像金字塔光流的特征跟踪方法_江志军
第32卷第8期2007年8月武汉大学学报?信息科学版 G eomatics and Information Science of Wuhan University Vol.32No.8Aug.2007 收稿日期:2007205212。 项目来源:国家自然科学基金资助项目(40301040)。 文章编号:167128860(2007)0820680204文献标志码:A 一种基于图像金字塔光流的特征跟踪方法 江志军1 易华蓉2 (1 武汉大学测绘遥感信息工程国家重点实验室,武汉市珞喻路129号,430079) (2 广东商学院旅游与环境学院,广州市赤沙路21号,510320) 摘 要:推导并实现了一种基于图像金字塔光流的角点特征跟踪方法。实验结果表明,该方法在不同运动幅度和运动方式下的检测跟踪性能较好,能够有效地应用于长序列图像的特征跟踪。关键词:图像金字塔;光流;特征跟踪中图法分类号:P237.3 特征检测与跟踪是基于连续图像序列的运动 结构重建问题[1](struct ure f rom motion ,SFM )研究的重要基础和关键技术环节,在航空航天、移动机器人定位、移动量测、交通等领域有着广泛的应用。图像特征的定义及检测方法多种多样,其中最常用的是角点特征[2]。基于梯度光流的角点跟踪方法实现起来相对简单,计算复杂度较低,而且能够得到相当精确的跟踪,如L K 方法[3]。然而,该类方法在应用中也有局限性,如仅适用于小图像运动[4],要求相邻图像间的目标运动小于1个像素。 本文方法基于图像金字塔的分层结构与多分辨率特征,同级别的图像分辨率层次上动态扩展。 1 角点特征检测 对三维重建应用而言,角点是图像的一个重 要的局部特征,它最小化了图像上重要的形状信息[2]。在有图像噪声和区域变形的情况下,特征跟踪考虑到图像上多方向强度(灰度)变化为一种稳定的结构,设想围绕图像中的每个像素点来建立某个小的窗口,使该窗口在不同方向上滑动一个小的距离,并计算该窗口内所有像素强度变化的平均值。如果在所有方向滑动时,窗口内的强度变化都超过了某一门限值,那么该点即可视为检测得到的待跟踪角点。 假设窗口滑动向量为h =(u ,v )T ,定义窗口像素的灰度方差和SSD 作为滑动后强度变化的度量(对彩色图像,首先进行灰度化处理)。对图像上任一像素点p =(x ,y )T ,则有: SSD (p )= ∑W ‖I (p )-I (p +h )‖2 (1) 对I (p +h )在p 点处作一阶泰勒展开近似: I (p +h )=I (p )+I x u +I y v (2) 代入式(1)中并写成矢量形式可得: SSD (p )= ∑W ‖D I h ‖2 =∑ W h T D T I D I h , D I =(I x ,I y ) T (3) 定义 D = ∑ W D T I D I = A C C B (4) 式中,A = ∑ W I x 2 ;B = ∑W I y 2 ;C = ∑W I x I y 。A 、 B 、 C 可使用各种常用梯度算子从图像上计算得 到,本文使用Sobel 算子[5]。SSD 表达式可简写为: SSD (p )=h T Dh (5) 对于n ×n 方阵M ,可以看作是n 维欧氏空 间的线性变换,其特征矢量确定了缩放变换的方向,而其特征值表征该方向上的缩放大小,即可以根据D 的特征值来确定图像强度变化的幅度。 若‖h ‖=α,λ1、λ2为2×2方阵D 的两个特征值,且λ1≤λ2,则
LK光流算法总结-精选.doc
运动目标检测之Lucas-Kanade 光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热 点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展 前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出 来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差 分法和光流法。 1 背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到 运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高 斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中 有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检 测的结果 2 帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的 方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常 物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
LK光流算法总结
运动目标检测之Lucas-Kanade光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。 1背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果 2帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
一种视频微表情检测的改进光流算法
2018年6月图 学 学 报 June2018第39卷第3期JOURNAL OF GRAPHICS V ol.39No.3一种视频微表情检测的改进光流算法 李秋宇1,张玉明2,杨福猛3,詹曙1 (1. 合肥工业大学计算机与信息学院,安徽合肥 230009; 2. 芜湖职业技术学院电气工程学院,安徽芜湖 241000; 3. 安徽信息工程学院,安徽芜湖 241000) 摘要:微表情是人们在试图隐藏自己真实情感时表现出的不受自主神经控制、持续时间短暂,强度十分微弱的面部表情。由于微表情与谎言识别有着密切的联系,其公共安全、侦查讯问、临床医学等领域有很大的应用前景。针对人为识别微表情十分困难的问题,提出一种基于Horn-Schunck (HS)光流法改进并应用于微表情自动检测的方法。使用预条件Gauss-Seidel迭代方法改进了HS光流法,加快了收敛速度。通过在自发微表情数据库CASME中进行实验,该验证方法在微表情检测中有很好的效果。 关键词:微表情检测;光流法;预条件迭代 中图分类号:TP 391 DOI:10.11996/JG.j.2095-302X.2018030448 文献标识码:A 文章编号:2095-302X(2018)03-0448-05 An Improved Optical Flow Algorithm for Micro Expression Detection in the Video Sequence LI Qiuyu1, ZHANG Yuming2, YANG Fumeng3, ZHAN Shu1 (1. School of Computer and Information, Hefei University of Technology, Hefei Anhui 230009, China; 2. School of Electrical Engineering, Wuhu Institute of Technology, Wuhu Anhui 241000, China; 3. Anhui Institute of Information Technology, Wuhu Anhui 241000, China) Abstract: Micro-expression is a kind of short-duration subtle expression which is not controlled by the autonomic nervous system. Micro-expression appears when a person is attempting to conceal his true emotion. Micro-expression detection boasts great application prospects in many fields, such as public security, investigation and interrogation as well as clinical medicine due to its close relationship with lie detection. Automatic detection of micro-expressions has come to the fore in research, because it is of great difficulty to artificially identify micro-expression . This paper proposes an improved algorithm based on the Horn-Schunck (HS) optical flow for automatic micro-expression detection. In this study, the pre-conditioned Gauss-Seidel iterative method is employed to improve the HS optical flow method, which accelerates the convergence rate. Experiments in the spontaneous micro-expression database CASME show that the propounded method exerts an excellent effect on the detection of micro-expression. Keywords: micro-expression detection; optical flow; preconditioned iteration 第一作者:李秋宇(1993-),男,安徽霍邱人,硕士研究生。主要研究方向为计算机视觉、深度学习。E-mail:lqy@https://www.360docs.net/doc/003573736.html, 通信作者:詹曙(1968-),男,安徽合肥人,教授,博士。主要研究方向为三维人脸图像分析和识别、医学影像分析和医学成像系统。 E-mail:shu_zhan@https://www.360docs.net/doc/003573736.html, 万方数据
光流法
光流的概念是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。一般而言,光流是由于场景中前景目标本身的移动、相机的运动,或者两者的共同运动所产生的。其计算方法可以分为三类:(1)基于区域或者基于特征的匹配方法; (2)基于频域的方法; (3)基于梯度的方法; 简单来说,光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”。光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。研究光流场的目的就是为了从图片序列中近似得到不能直接得到的运动场。 光流法的前提假设: (1)相邻帧之间的亮度恒定; (2)相邻视频帧的取帧时间连续,或者,相邻帧之间物体的运动比较“微小”;(3)保持空间一致性;即,同一子图像的像素点具有相同的运动 这里有两个概念需要解释: 运动场,其实就是物体在三维真实世界中的运动; 光流场,是运动场在二维图像平面上的投影。
如上图所示,H中的像素点(x,y)在I中的移动到了(x+u,y+v)的位置,偏移量为(u,v)。 光流法用于目标检测的原理:给图像中的每个像素点赋予一个速度矢量,这样就形成了一个运动矢量场。在某一特定时刻,图像上的点与三维物体上的点一一对应,这种对应关系可以通过投影来计算得到。根据各个像素点的速度矢量特征,可以对图像进行动态分析。如果图像中没有运动目标,则光流矢量在整个图像区域是连续变化的。当图像中有运动物体时,目标和背景存在着相对运动。运动物体所形成的速度矢量必然和背景的速度矢量有所不同,如
光流法
光流法 光流是一种简单实用的图像运动的表达方式,通常定义为一个图像序列中的图像亮度模式的表观运动,即空间物体表面上的点的运动速度在视觉传感器的成像平面上的表达。 中文名:光流法属于:简单实用的图像运动 表示:一种几何变化分为:匹配的方法频域的方法梯度的方法 人类主要通过眼睛,耳朵和大脑来获取、处理与理解获得的信息。然而图像具有最直观、明了、让人一看就懂的特质,因为人们获取信息70%以上依靠视觉,20%左右依靠听觉,10%左右依靠触觉和嗅觉,这就是为什么“百闻不如一见”,一幅图像说明一切问题,胜过千言万语。 计算机视觉这一领域的先驱可追溯到很早的时候,但是直到20世纪70年代后期,当计算机的性能提高到足以处理诸如图像这样的大规模数据时,计算机视觉才得到了正式的关注和发展。计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释,也包括对视觉信息的采集,传输,处理,存储与理解等过程。计算机视觉最终研究目标就是使计算机能像人那样通过视觉观察和理解世界,具有自主适应环境的能力,要经过长期的努力才能达到的目标。因此,在实现最终目标以前,人们努力的中期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。计算机视觉应用领域较广泛,包括航空航天、卫星照片、军事导弹精确制导、移动机器人视觉导航、工业自动化系统、医学辅助诊断等。 计算机视觉系统的结构形式很大程度上依赖于其具体应用方向。有些是独立工作的,用于解决具体的测量或检测问题,也有些作为某个大型复杂系统的组成部分出现,比如工业控制系统,汽车导航系统。计算机视觉系统的具体实现方法同时也由其功能决定,有些是预先固定的,有些是在运行过程中自动学习调整。尽管如此,以下几个功能却几乎是每个计算机系统都需要具备的。 图像获取,一幅数字图像是由一个或多个图像感知器产生的,例如摄像机,红外遥感摄像仪,雷达,超声波接收器等,所产生的图片包括二维图像,三维图像或者一个图像序列。 预处理,在对图像实施具体的计算机视觉方法来提取某种特定的信息前,首先通过一种或一些方法预先对图像进行处理,以满足后继图像处理的要求,包括二次取样,平滑去噪,提高对比度等。 特征提取,是使用计算机提取图像信息,检查每个像素确定该像素是否代表一个特征,例如边缘提取,边角检验,斑点检验。图像分割,对图像进行分割来提取有价值的信息用于后继处理的部分。 光流法的基本原理
采用序优化的改进蚁群算法
第44卷 第2期2010年2月 西 安 交 通 大 学 学 报 J OU RNAL O F XI ′AN J IAO TON G UN IV ERSIT Y Vol.44 №2Feb.2010 收稿日期:2009Ο06Ο20. 作者简介:张兆军(1981-),男,博士生;冯祖仁(联系人),男,教授,博士生导师. 基金项目:国家自然科学基金资助项目(60875043);国家重点基础研究发展规划资助项目(2007CB311006). 采用序优化的改进蚁群算法 张兆军1,2,冯祖仁1,2,任志刚1,2 (1.西安交通大学系统工程研究所,710049,西安;2.西安交通大学机械制造 系统工程国家重点实验室,710049,西安) 摘要:为了评价蚁群算法在有限时间内所得优解的质量,基于序优化方法提出了一种改进的蚁群算法:使用盲目挑选规则选择初始解,并对信息素进行相应的初始化;确定得到满足要求的优解所需要的迭代次数,将其作为算法的终止条件;为了更好地利用每次迭代中的优解,在算法开始阶段使用前l 个迭代优解更新信息素,以增强探索能力;在算法结束阶段采用当前迭代最优解更新信息素,以加快收敛速度.改进算法在保证收敛的前提下,并没有增加算法的时间复杂度.对旅行商问题进行的仿真实验表明,改进算法在解的质量和收敛速度方面优于最大Ο最小蚂蚁系统.关键词:蚁群算法;序优化;盲目挑选;旅行商问题中图分类号:TP18 文献标志码:A 文章编号:0253Ο987X (2010)02Ο0015Ο05 Novel Ant Colony Optimization Algorithm B ased on Order Optimization ZHAN G Zhaojun 1,2,FEN G Zuren 1,2,REN Zhigang 1,2 (1.Systems Engineering Institute ,Xi ′an Jiaotong University ,Xi ′an 710049,China ;2.State Key Laboratory for Manufacturing Systems Engineering ,Xi ′an Jiaotong University ,Xi ′an 710049,China ) Abstract :To evaluate t he quality of optimal solutions obtained by t he ant colony optimization (ACO )algorit hm in limited time ,an imp roved ACO algorit hm is presented on t he basis of t he or 2dinal optimization.An initial solution is selected using t he blind picking rule ,and t he p heromone is initialized correspondingly.The number of iterations to achieve t he optimal solution meeting t he demand is t hen determined and is used as t he termination condition of t he algorit hm.To make better use of t he solutions obtained at each iteration ,t he first l solutions are employed to enhance search capability at t he beginning p hase of t he algorit hm.While t he current optimal solution is used at t he end p hase of t he algorit hm to accelerate t he convergence.The time complexity of t he novel algorit hm is not increased under t he condition t hat ensures t he convergence.Simulation re 2sult s on t he traveling salesman p roblem show t hat t he p roposed algorit hm is superior to t he max 2min ant system in bot h t he quality of solutions and t he speed of convergence. K eyw ords :ant colony optimization ;ordinal optimization ;blind picking ;traveling salesman problem 蚁群算法[1]是一种仿生随机优化算法,已被成功应用于旅行商问题(TSP )、二次分配、网络路由、属性约简[2]等问题的求解,具有鲁棒性、正反馈、分布式计算和易与其他算法结合等优点.然而,现有方法也存在一些不足,如初期搜索时间偏长,容易陷入局部最优解等.为此,学者们提出了很多改进算 法,例如使用局部更新策略和全局更新策略的蚁群系统[3],限制信息素的上、下界并使用最优解更新策略的最大2最小蚂蚁系统(max 2min ant system ,MMAS )[4]等.此外,文献[5]受神经网络和遗传算法的启发,提出了一种二进制蚁群进化算法;文献[6]将分散搜索的思想融入蚁群算法,提高了算法的
光流法
基于前—后向光流点匹配运动熵的视频抖动检测算法 1问题描述 本文主要研究的是视频监控诊断系统中的视频画面抖动检测问题。正常情况下,运动图像序列的连续多帧之间过渡是平滑的,画面相关性比较连续,但是如果它们之间的相关性出现大波动,视频就会出现抖动的情况。在视频监控中,摄像头一般都是固定在某个位置,因此造成视频画面抖动现象的原因主要有: 1)摄像头受到环境的干扰( 比如强风) 发生有规律的摆动从而造成图像的上下或左右抖动; 2) 摄像头正在被人移动,造成画面抖动。任何一种情况,都会导致画面出现周期性振颤或不规则扭曲,都意味着摄像头工作出现了异常。 2问题分析 常见的运动参数估计算法主要有灰度投影法、块匹配法、特征点匹配和光流法。针对视频监控画面抖动检测问题,本文提出一种实时有效、具有较高精度的检测算法。算法采用稀疏型的光流特征和ORB 特征点匹配相融合的策略,采用前向—后向误差作为检验标准过滤错误匹配的光流点,然后根据正确匹配的点集合估计视频帧之间的全局运动方向和幅度等参数。在一个时间段内,利用运动熵衡量连续帧的运动混乱程度,判断视频画面是否发生抖动异常现象。 本文针对视频质量诊断的抖动异常检测问题:1)提出融合光流点与特征点匹配,利用前-后向误差的方式验证并获取有效匹配点集的策略,可以缓解大位移抖动的影响,增强匹配点的可靠性;2)引入运动熵衡量连续帧间运动一致性程度,用于判断是否发生抖动,方法简单有效,实际可操作性比较好。最后面向实际应用,搜集了各种在实际中发生抖动异常的视频监控录像数据,在数据集上测试了本文算法的
性能,并进行了比较。实验证明,本文算法达到了实时性要求,具备较高的检测精度,能够满足现实监控系统视频质量诊断的工作要求。 3算法描述 视频发生抖动,意味着整个画面都将发生运动,同一帧画面上的点总体运动趋势保持一致。基于这个假设前提,可以通过计算画面的全局运动参数来估计画面的整体运动情况。鉴于光流特征能够较好地反映视频画面丰富的运动信息,特征点匹配对于环境适应性较好,本文提出将稀疏型光流特征与特征点匹配相融合的策略用于估计运动过程参数,有效互补它们各自的优点。 在视频的整个画面空间上进行快速Harris 角点检测,将画面均匀划分成若干栅格区域( 如3* 3的划分),然后在每个栅格区域随机选取若干个角点,形成均匀分布于画面空间的角点点集,计算它们的光流特征。由于采样的点数远小于图像的像素个数,其稀疏型光流特征的计算量将大大降低。根据光流特征,可以粗略估计当前点在下一帧的大致位置。为了避免光流受大位移抖动的影响,减少匹配误差,算法在光流点估计位置的局部邻域范围内进行特征点匹配,一方面可以利用特征点匹配的良好适应性,同时可以避免特征点全局画面匹配的计算量。最后算法根据前-后向误差的标准,选取更为可靠的匹配点对估计全局运动参数。
蚁群算法的改进神经网络程序
%蚁群算法的改进神经网络程序 %这是某个硕士论文中附带的程序,经过试用,完全不能用。 %蚁群算法优化神经网络 %参数值 %ant_amount,蚂蚁总数 %quanzhi_amount,权值总数 %xuanzhi_amount,可选值总数 %k,蚂蚁k %i,权值j %j,选值j %tao,信息素矩阵 %zeng_tao,信息素增量 %NC,最大迭代 %rou,信息挥发度; %Q,信息总量:为蚂蚁循环一周时释放在所经过的路径上的信息素总量%zuixiaowucha,最小误差 %shijiwucha实际误差 %conter迭代次数 %sum_tao,tao和 %p,信息素概率 %4个矩阵: % iwb(i,j),权值矩阵(i*j) % tao(i,j),信息素矩阵(i*j) %mayi_xuanzhi(k,i),每只蚂蚁选的权值矩阵(k*i) %mayi_xuanwei(k*i),每只蚂蚁选的权值位置矩阵(k*i) %网络主程序 Clear; yangben_yuanshi=[ 7.8 111 701 129 2.8; 45 168 330 82 3.1; 58 103 251 51 6; 56 144 164 36 1.8; 82 161 406 79 8.9; 10 15 19.5 5 0; 18 135 208 59 0; 129 181 244 44 0; 12 23 98 9 0; 164 244 497 103 8.3; 16 237 470 92 0; 15 125 574 29 7;
49 41.6 124 25.1 15.7; 21 7.6 96.3 4.7 26.73; 65 26.1 41.6 10.1 57.8; 64 22 51.7 20.7 95.1; 29 7.52 14.8 5.5 5.4; 6.3 7.87 3.03 6.97 11.1; 413 6.8 4.6 40.4 8.15; 23.4 14.3 9.71 7.12 3.44; 15.2 2.4 4.5 4.8 27.2; 45 431 517 210 2; 65 150 54 45 0; 4 70.7 211 76 18.9; 22 12 6.3 4.6 7.4; 130.4 48.8 93.4 16.3 123.4; 198 54.3 107.1 6.4 148.8; 521.1 107 177.1 9.2 144.7; 217.5 40 51.8 4.9 67.5; 63 7.4 17 1.8 6.2; 54 7 8.6 7.4 5.4; 150 27 63 3.6 90; 162 109 201 11 183; 59 28 70 9 15; 201 36.1 32.3 6 47.2]; %训练样本初值 for i=1:35 % 训练样本归一化 yangben_guiyi(i,:)=0.1+0.8*(yangben_yuanshi(i,:)-min(yangben_yuanshi(i,:)))/(max(yangben_yuansh i(i,:))-min(yangben_yuanshi(i,:))); end yangben_shuchu=[ 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0; 1 0 0 0 0;