舵机工作原理
控制思想
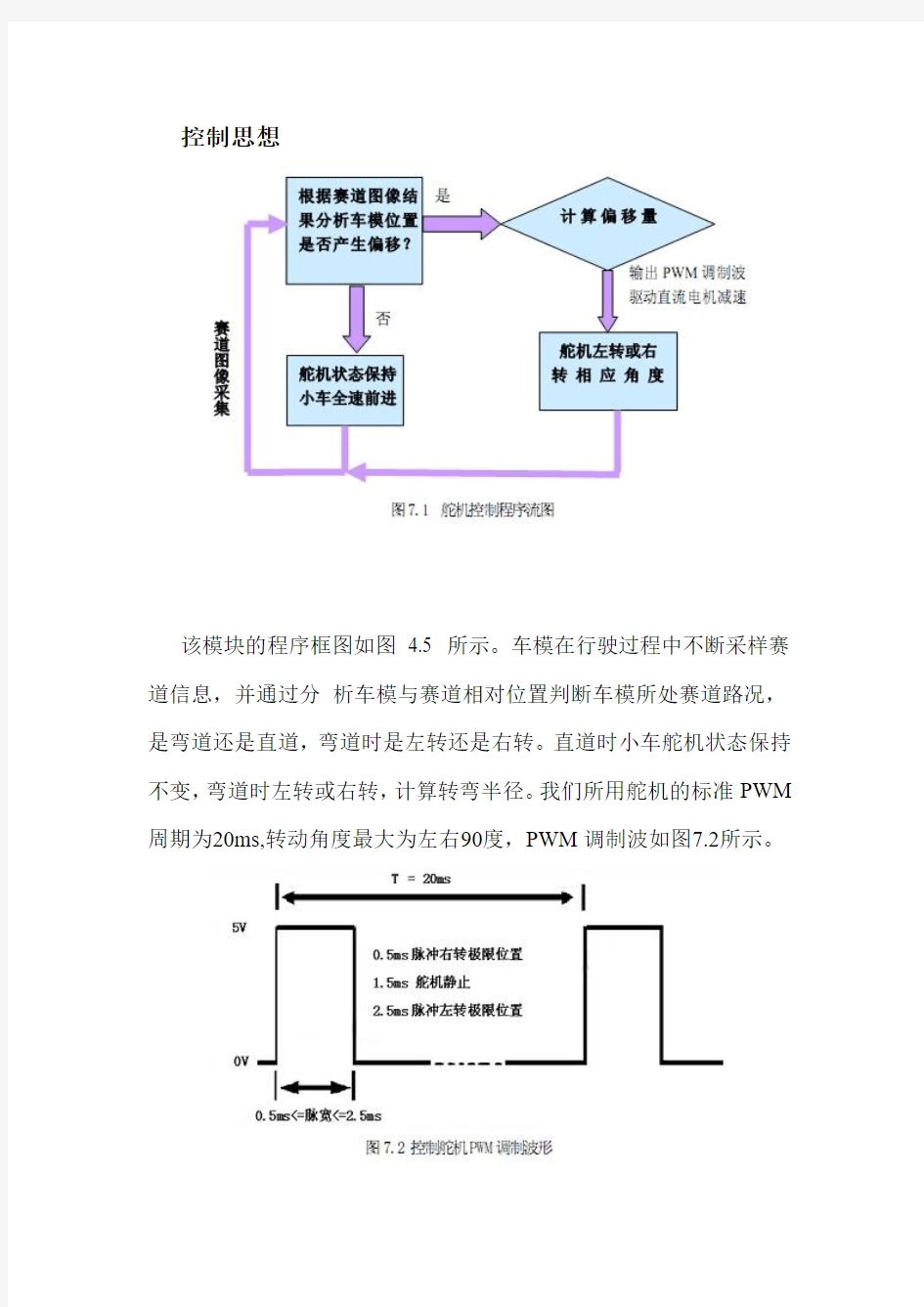
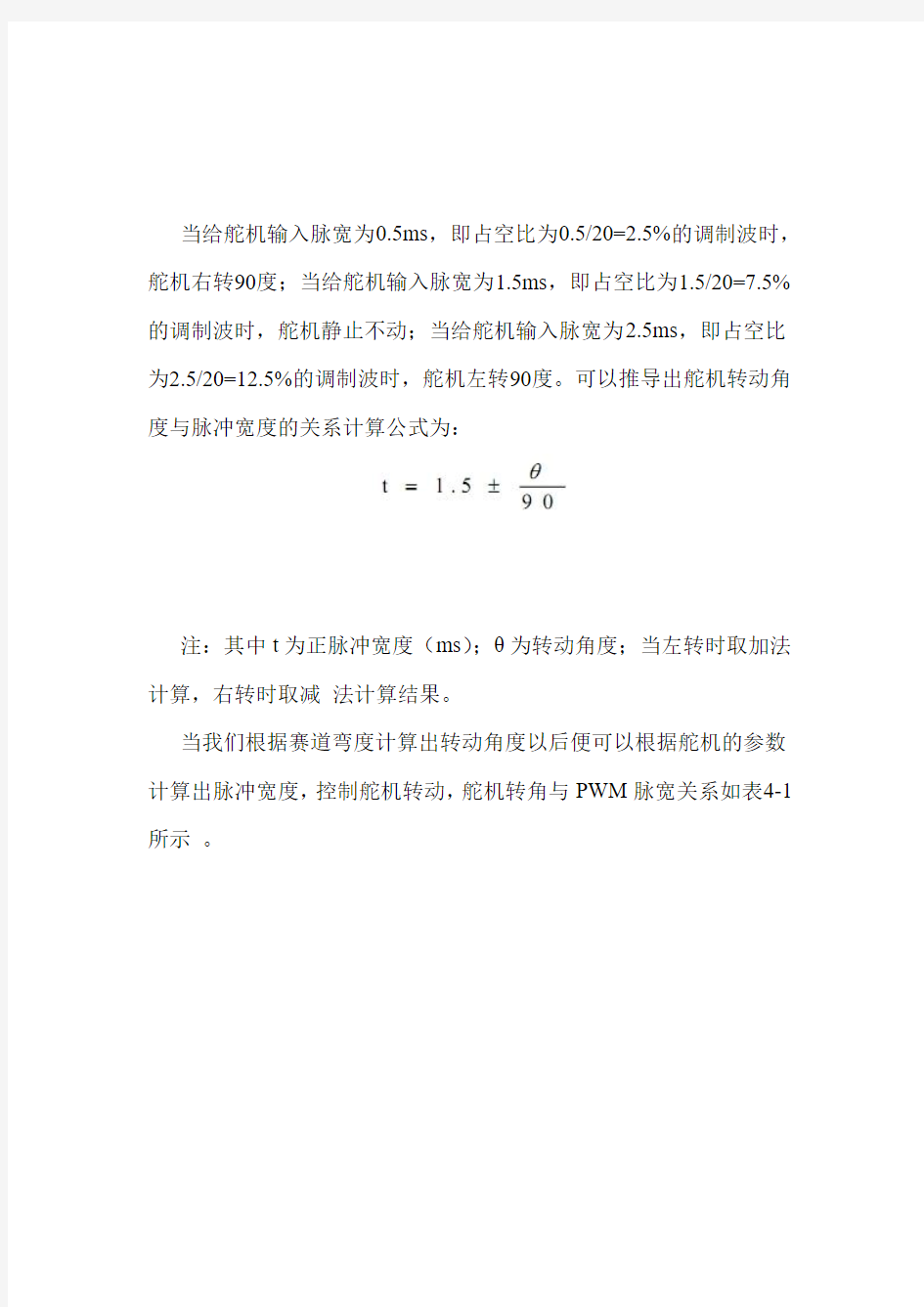
该模块的程序框图如图4.5 所示。车模在行驶过程中不断采样赛道信息,并通过分析车模与赛道相对位置判断车模所处赛道路况,是弯道还是直道,弯道时是左转还是右转。直道时小车舵机状态保持不变,弯道时左转或右转,计算转弯半径。我们所用舵机的标准PWM 周期为20ms,转动角度最大为左右90度,PWM调制波如图7.2所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。可以推导出舵机转动角度与脉冲宽度的关系计算公式为:
注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。
当我们根据赛道弯度计算出转动角度以后便可以根据舵机的参数计算出脉冲宽度,控制舵机转动,舵机转角与PWM脉宽关系如表4-1所示。
在具体操作中PWM调制波的周期可以设置在20ms左右一定范围内,比如设置为10ms 或是30ms均可以使舵机正常转动,但是设置周期较长时,系统延迟时间较多,舵机转向会出现滞后,导致赛车冲出跑道;设置周期如果过短,系统输出PWM 调制波不稳定,舵机转动也会受影响,不能实现赛车的精确转向。经过反复测试,最终把输出PWM 调制波周期设定为13ms (用计数器实现)。
运行电机的转速以及舵机的转角,在软件上都是通过对PWM 波占空比进行设置来相应控制的。前面提到,舵机转角控制需要将两个
八位寄存器合成为一个十六位寄存器。程序中的舵机位置信号,当PWM调制波周期设为13ms时,因为总线频率为24MHz,用时钟SB,可计算得到16进制参数为9870H,舵机中间位置时占空比16进制参数为1680H,要分配给PWM6和7,分配时这2个端口的赋值必须是16进制,那么PWM模块初始化赋值为
PWMPER6= 0x98,PWMPER7= 0x70,PWMDTY6= 0x16,PWMDTY7= 0x80,因此这就牵涉到如何将1个十进制数分配为2个十六进制数问题。有2种方案,一种是除法取余,另一种是移位操作,前者编译生成的代码比后者要多,所以采用移位操作来实现,即取高位时与0xFF00先作“&”计算,然后将所得到的数向右移8位(>>8),即可取得高8位;同理,取低8位时只要与0x00FF作“&”计算即可(算法)。
2、结构和控制
一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
舵机的控制信号为周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,转动范围不能超过180度,适用于那些需要角度不断变化并可以保持的驱动当
中。比方说机器人的关节、飞机的舵面等。
常见的舵机厂家有:日本的Futaba、JR、SANWA等,国产的有北京的新幻想、吉林的振华等。现举Futaba S3003来介绍相关参数,以供大家设计时选用。之所以用3003是因为这个型号是市场上最常见的,也是价格相对较便宜的一种(以下数据摘自Futaba产品手册)。
尺寸(Dimensions):40.4×19.8×36.0 mm 重量(Weight):37.2 g 工作速度(Operating speed):0.23 sec/60°(4.8V) 0.19 sec/60°(6.0V) 输出力矩(Output torque):3.2 kg.cm (4.8V) 4.1 kg.cm (6.0V) 由此可见,舵机具有以下一些特点:>体积紧凑,便于安装;>输出力矩大,稳定性好;
>控制简单,便于和数字系统接口;
正是因为舵机有很多优点,所以,现在不仅仅应用在航模运动中,已经扩展到各种机电产品中来,在机器人控制中应用也越来越广泛。
3、用单片机来控制
正是舵机的控制信号是一个脉宽调制信号,所以很方便和数字系统进行接口。只要能产生标准的控制信号的数字设备都可以用来控制舵机,比方PLC、单片机等。这里介绍利用51系列单片机产生舵机的控制信号来进行控制的方法,编程语言为C51。之所以介绍这种方法只是因为笔者用2051实现过,本着负责的态度,所以敢在这里写出来。程序用的是我的四足步行机器人,有删改。单片机并不是控制舵机的最好的方法,希望在此能起到抛砖引玉的作用。
2051有两个16位的内部计数器,我们就用它来产生周期20 ms的
脉冲信号,根据需要,改变输出脉宽。基本思路如下(请对照下面的程序):
我用的晶振频率为12M,2051一个时钟周期为12个晶振周期,正好是1μs,计数器每隔1μs计一次数。以计数器1为例,先设定脉宽的初始值,程序中初始为1.5ms,在for循环中可以随时通过改变a 值来改变,然后设定计数器计数初始值为a,并置输出p12为高位。当计数结束时,触发计数器溢出中断函数,就是void timer0(void) interrupt 1 using1 ,在子函数中,改变输出p12为反相(此时跳为低位),在用20000(代表20ms周期)减去高位用的时间a,就是本周期中低位的时间,c=20000-a,并设定此时的计数器初值为c,直到定时器再次产生溢出中断,重复上一过程。
# include
#define uint unsigned int uint a,b,c,d;
/*a为舵机1的脉冲宽度,b为舵机2的脉冲宽度,单位1μs */ /*c、d为中间变量*/
/*以下定义输出管脚*/
sbit p12=P1^2; sbit p13=p1^3; sbit p37=P3^7;
/*以下两个函数为定时器中断函数*/
/*定时器1,控制舵机1,输出引脚为P12,可自定义*/
void timer0(void) interrupt 1 using 1 {p12=!p12; /*输出取反*/ c=20000-c; /*20000代表20 ms,为一个周期的时间*/
TH0=-(c/256); TL0=-(c%256); /*重新定义计数初值*/
if(c>=500&&c<=2500)c=a; else c="20000-a" ; /*判断脉宽是否
在正常范围之内*/
/*定时器2,控制舵机2,输出引脚为P13,可自定义*/
void timer1(void) interrupt 3 using 1 {p13=!p13; d=20000-d;
TH1=-(d/256); TL1=-(d%256); if(d>=500&&d<=2500)d=b; else
d="20000-b";
/*主程序*/ void main(void) {TMOD=0x11; /*设初值*/ p12=1;
p13=1; a=1500; b=1500; /*数值1500即对应1.5ms,为舵机的中间90度的位置*/ c=a;d=b; TH0=-(a/256); TL0=-(a%256);
TH1=-(b/256); TL1=-(b%256); /*设定定时器初始计数值*/ EA=1; ET0=1; TR0=1;EX0=1;EX1=1; ET1=1; TR1=1;
PX0=0; PX1=0; IT1=1; IT0=1; /*设定中断优先级*/ for(;;) {
/*在这个for循环中,可以根据程序需要在任何时间改变a、b值来改变脉宽的输出时间,从而控制舵机*/
因为在脉冲信号的输出是靠定时器的溢出中断函数来处理,时间很短,因此在精度要求不高的场合可以忽略。因此如果忽略中断时间,从另一个角度来讲就是主程序和脉冲输出是并行的,因此,只需要在主程序中按你的要求改变a值,例如让a从500变化到2500,就可以让舵机从0度变化到180度。另外要记住一点,舵机的转动需要时间的,因此,程序中a值的变化不能太快,不然舵机跟不上程序。根据需要,选择合适的延时,用一个a递增循环,可以让舵机很流畅的转动,而不会产生像步进电机一样的脉动。这些还需要实践中具体体会。
舵机的速度决定于你给它的信号脉宽的变化速度。举个例子,t=0试,脉宽为0.5ms,t=1s时,脉宽为1.0ms,那么,舵机就会从0.5ms 对应的位置转到1.0ms对应的位置,那么转动速度如何呢?一般来讲,3003的最大转动速度在4.8V时为0.23s/60度,也就是说,如果你要求的速度比这个快的话,舵机就反应不过来了;如果要求速度比这个慢,可以将脉宽变化值线性到你要求的时间内,做一个循环,一点一点的增加脉宽值,就可以控制舵机的速度了。当然,具体这一点一点到底是多少,就需要做试验了,不然的话,不合适的话,舵机就会向步进电机一样一跳一跳的转动了,尝试改变这“一点”,使你的舵机运动更平滑。还有一点很重要,就是舵机在每一次脉宽值改变的时候总会有一个转速由零增加再减速为零的过程,这就是舵机会产生像步进电机一样运动的原因
舵机原理
1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1) 发动机进气量,来控制发动机的拉力(或推力); 2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横 滚运动; 3) 水平尾舵面,用来控制飞机的俯仰角; 4) 垂直尾舵面,用来控制飞机的偏航角; 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操 作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而
详细的舵机控制原理资料
目录 一.舵机PWM信号介绍 (1) 1.PWM信号的定义 (1) 2.PWM信号控制精度制定 (2) 二.单舵机拖动及调速算法 (3) 1.舵机为随动机构 (3) (1)HG14-M舵机的位置控制方法 (3) (2)HG14-M舵机的运动协议 (4) 2.目标规划系统的特征 (5) (1)舵机的追随特性 (5) (2)舵机ω值测定 (6) (3)舵机ω值计算 (6) (4)采用双摆试验验证 (6) 3.DA V的定义 (7) 4.DIV的定义 (7) 5.单舵机调速算法 (8) (1)舵机转动时的极限下降沿PWM脉宽 (8) 三.8舵机联动单周期PWM指令算法 (10) 1.控制要求 (10) 2.注意事项 (10) 3.8路PWM信号发生算法解析 (11) 4.N排序子程序RAM的制定 (12) 5.N差子程序解析 (13) 6.关于扫尾问题 (14) (1)提出扫尾的概念 (14) (2)扫尾值的计算 (14)
一.舵机PWM 信号介绍 1.PWM 信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 目前,北京汉库的HG14-M 舵机可能是这个过渡时期的产物,它采用传统的PWM 协议,优缺点一目了然。优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM 格式。 但是它是一款数字型的舵机,其对PWM 信号的要求较低: (1) 不用随时接收指令,减少CPU 的疲劳程度; (2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机; 其PWM 格式注意的几个要点: (1 ) 上升沿最少为0.5mS ,为0.5mS---2.5mS 之间; (2) HG14-M 数字舵机下降沿时间没要求,目前采用0.5Ms 就行;也就是说PWM 波形 可以是一个周期1mS 的标准方波; (3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM 信号;它也可以输入一个周 期为1mS 的标准方波,这时表现出来的跟随性能很好、很紧密。
舵机的工作原理
基于AT89C2051单片机的多路舵机控制器设计 摘要舵机是机器人、机电系统和航模的重要执行机构。舵机控制器为舵机提供必要的能源和控制信号。本文提出一种以外部中断计数为基础的PWM波形实现方法。该方法具有简单方便,成本低,可实现多路独立PWM输出的优点。 关键词A T89C205l 舵机控制器外部中断PWM 舵机是一种位置伺服的驱动器。它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。在微机电系统和航模中,它是一个基本的输出执行机构。 1 舵机的工作原理 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA66881。的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送人电机驱动集成电路BA6686,以驱动电机正反转。当电机转速一定时,通过级联减速齿轮带动电位器R。,旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。 2 舵机的控制方法 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。 3 舵机控制器的设计 (1)舵机控制器硬件电路设计 从上述舵机转角的控制方法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号(PWM)。该方波信号可由FPGA、模拟电路或单片机来产生。采用FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出。一般采用单片机作舵机的控制器。目前采用单片机做舵机控制器的方案比较多,可以利用单片机的定时器中断实现PWM。该方案将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1。Th、T1的时间值随脉冲宽度的变换而变化,但,Th+T1=20ms。该方法的优点是,PWM信号完全由单片机内部定时器的中断来实现,不需要添加外围硬件。缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较麻烦;为了满足20ms 的周期,单片机晶振的频率要降低;不能实现多路输出。也可以采用单片机+8253计数器的实现方案。该方案由单片机产生计数脉冲(或外部电路产生计数脉冲)提供给8253进行计数,由单片机给出8253的计数比较值来改变输出脉宽。该方案的优点是可以实现多路输出,软件设计较简单;缺点是要添加l片8253计数器,增加了硬件成本。本文在综合上述两个单片机舵机控制方案基础上,提出了一个新的设计方案,如图4所示。 该方案的舵机控制器以A T89C2051单片机为核心,555构成的振荡器作为定时基准,单片机通过对555振荡器产生的脉冲信号进行计数来产生PWM信号。该控制器中单片机可以产生8个通道的PWM信号,分别由AT89C2051的P1.0~Pl.7(12~19引脚)端口输出。输出的8路PWM信号通过光耦隔离传送到下一级电路中。因为信号通过光耦传送过程中进行了反相,因此从光耦出来的信号必须再经过反相器进行反相。方波信号经过光耦传输后,前沿和后沿会发生畸变,因此反相器采用CD40106施密特反相器对光耦传输过来的信号进行整形,产生标准的PWM方波信号。笔者在实验过程中发现,舵机在运行过程中要从电源
航模舵机控制原理详解
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
电动液压舵机的工作原理及使用管理
毕业专题论文 电动液压舵机的工作原理及运行管理 The working principle and management of the electro-hydraulic steering gear 学生姓名张学印 所在专业轮机工程 所在班级轮机1062 申请学位学士学位 指导教师陈波职称讲师副指导教师职称
目录 摘要 ......................................................................................................................................... I ABSTRACT ................................................................................................................................... II 引言 .. (1) 1 舵机的工作要求及工作原理 (1) 1.1对舵机的工作要求 (1) 1.2阀控型液压舵机工作原理 (2) 1.2.1 工作原理 (2) 1.2.2 压力控制 (3) 1.2.3 补油、放气和舵角指示 (4) 1.3泵控型液压舵机工作原理 (5) 1.3.1 工作原理 (5) 1.3.2 主油路的锁闭 (6) 1.3.3 工况选择 (6) 1.3.4 压力保护、补油、放气和舵角指示 (7) 2 潜在故障分析 (7) 2.1液压系统故障 (8) 2.1.1 可能引起的故障及分析 (8) 2.1.2 预防措施 (8) 2.2电子系统故障 (9) 2.2.1 通信故障 (9) 2.2.2 遥控故障 (9) 2.2.3 预防措施 (9) 2.3电力系统故障 (9) 2.3.1 主要故障及危害 (9) 2.3.2 预防措施 (10) 3 舵机的工作要求及日常管理 (10) 3.1舵机的日常管理 (10) 3.1.1 系统的清洗和充油 (10) 3.1.2 舵机的试验和调整 (10) 3.2舵机日常管理注意事项 (11) 结束语 (11) 鸣谢 (12) 参考文献 (13)
液压舵机
第六节液压舵机 1056 平衡舵是指舵叶相对于舵杆轴线。 A.实现了静平衡 B.实现了动平衡 C.前后面积相等 D.前面有一小部分面积 1057 平衡舵有利于。 A.减小舵叶面积 B.减少舵机负荷 C.增大转船力矩 D.增快转舵速度1058 舵叶上的水作用力大小与无关。 A.舵角 B.舵叶浸水面积 C.舵叶处流速 D.舵杆位置 1059 舵机转舵扭矩的大小与有关。 A.水动力矩 B.转船力矩C.舵杆摩擦扭矩 D.A与C 1060 舵叶的平衡系数过大会造成。 A.回舵扭矩增大 B.转舵速度变慢 C.船速下降 D.转舵扭矩增大 1061 船舶倒航时的水动力矩不会超过正航时的水动力矩,因为倒航时。 A.最大航速低 B.水压力中心距舵杆距离近 C.倒航使用舵角小 D.A+ B 1062 采用平衡系数恰当的平衡舵主要好处是。 A.舵杆轴承径向负荷降低 B.转舵速度提高 C.常用舵角和最大航角时转航为拒皆降低 D.常用舵角时转舵扭矩不降低,最大舵角时降低 1063 舵的转船力矩。 A.与航速无关 B.与舵叶浸水面积成正比 C.只要舵角向90度接近,则随之不断增大 D.与舵叶处水的流速成正比 1064 关于舵的下列说法错的是。 A.船主机停车,顺水漂流前进,转航不会产生舵效。 B.转舵会增加船前进阻力。 C.转舵可能使船横倾和纵倾。 D.舵效与船途无关 1065 船正航时下列情况中舵的水动力矩帮助舵叶离开中位。 A. 平衡舵小舵角时 B.平衡舵大舵角时 C.不平衡舵小舵角时 D.不平衡舵大舵角时 1066 正航船舶平衡舵的转舵力矩会出现较大负扭矩的是。 A.小舵角回中 B.小舵角转离中位 C.大舵角回中 D.大舵角转离中位1067 限定最大舵角的原因主要是。 A.避免舵机过载 B.避免工作油压太高 C.避免舵机尺度太大 D.转船力矩随着舵角变化存在最大值 1068 某船若吃水和航速相同,在最大舵角范围内操舵,正航与倒航所需转舵力矩。 A.相同 B.前者大 C.后者大 D.因船而异 1069 舵机公称转舵扭矩是按正航时确定,因为。 A.大多数情况船正航 B.正航最大舵角比倒航大 C.同样情况下正航转舵扭矩比倒航大D.正航最大航速比倒航大得多 1070 舵机在正航时的转舵扭矩一般比倒航大,因为。 A.倒航舵上水压力的力臂较短 B.同样航速倒航时舵上水压力较小 C.A十B D.倒航最大航速比正航小得多 1071 下列关于舵的水动力矩和转船力矩的说法对的是。 A.与船速成正比 B.与船速平方成正比 C.与舵叶处水流速度成正比 D.与舵叶处水流速度平方成正比 1072 舵机公称转舵扭矩是指转舵扭矩。 A.平均 B.工作油压达到安全阀开启时 C. 船最深航海吃水、最大营运航速前进,最大舵角时的 D.船最深航海吃水、经济航速前进,最大舵角时的
舵机原理及其使用详解
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
舵机控制原理以及分类作用
一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,
输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
舵机原理
舵机原理 2009-11-09 19:03 1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1.发动机进气量,来控制发动机的拉力(或推力); 2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动; 3.水平尾舵面,用来控制飞机的俯仰角; 4.垂直尾舵面,用来控制飞机的偏航角; 遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。舵机因此得名:控制舵面的伺服电机。 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信 号待会再讲),控制电机转动,电机带动一系列齿轮组,减 速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相 连的,舵盘转动的同时,带动位置反馈电位计,电位计将输 出一个电压信号到控制电路板,进行反馈,然后控制电路板 根据所在位置决定电机的转动方向和速度,从而达到目标停 止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就 有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动 和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速 之分,体积有大中小三种之分等等,组合不同,价格也千差 万别。例如,其中小舵机一般称作微舵,同种材料的条件下 是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据 需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的 是地线,这辆根线给舵机提供最基本的能源保证,主要是电 机的转动消耗。电源有两种规格,一是4.8V,一是6.0V, 分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要 大一些,具体看应用条件;另外一根线是控制信号线,Futaba 的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA 的某些型号的舵机引线电源线在边上而不是中间,需要辨 认。但记住红色为电源,黑色为地线,一般不会搞错。
液压舵机操作实验
实验三液压舵机的操作实验 一、实验内容 1、液压舵机遥控系统操舵试验与调整。 2. 电子式随动操舵系统操舵实验。 二、实验要求 通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。 三、实验设备 YD100 -1.6 / 28型液压舵机1套 D D1型电子随动操舵仪1台 (一)YD100 - 1.6 / 28型液压舵机 该舵机由广西梧州华南船舶机械厂制造。现装于辅机实验室内。 其主要技术数据如下: 型号:Y D100- 1.6/ 2 8 公称力矩: 1.6 t m(15.6 KN.M) 转舵时间:28 sec 最大转角正负35度 工作压力:100 kg/cm2 (9.81MPa) 安全阀调整压力:110kg/cm2 (10.8MPa) 电动机型号:JO2H-12-4(Y80L2一4) 电动机功率:0.8 kW 电动机转速: 1500 r.p.m. 电动机电压。380 V 油泵型号;10 SCYI4一1 油泵排量;10 m L/r 最大工作压力:320 kg/cm2(31.4MPa) 电磁阀型号: 34 E 1M-B10H-T
电磁阀流量:40L/min 电磁阀最大工作压力:210 kg/cm2(20.59 MPa) 溢流阀型号:Y E-B10 C 电磁阀流量:40 L/min 溢流阀最大工作压力:140 kg/cm2(13.73MPa) 注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。 1.转舵机构 舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。所以,舵机的输出力矩与工作油压的关系为(见图3—1)。 πd2R△P M= Z η 4 cos2a 式中:Z——油缸对数(Z=1) d——柱塞直径(d=10cm) R——舵杆中线到油缸中心线的垂直距离(R=18cm) △P——油缸压差(△P=P1—P2) η——推舵装置机械效率(η≈0.8) a——舵的转角 舵机力矩特性M=f(a)如图3—2所示。舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。. 该舵机的转舵机构主要由油缸、柱塞、舵柄、边舵柄、拉杆等组成,如图3—3所示。 2.轴向柱塞式油泵 该舵机的油泵为手动变量轴向柱塞泵,其工作原理如图3-4所示。它由湖南邵阳液压件厂生产。 泵的传动轴(19)通过花键与缸体(16)连接,且带动缸体(16)旋转,使
舵机工作原理要点
舵机工作原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。
3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能
提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用图3来表示。 可变脉宽输出试验(舵机控制) 原创:xidongs 整理:armok / 2004-12-05 / https://www.360docs.net/doc/099043084.html,
舵机工作原理
转叶式液压舵机产品介绍 上海海事大学摘编2010-01-18 关键字:液压舵机浏览量:627 大型船舶几乎全部采用液压舵机。电动舵机仅仅用于一些小型船舶上。液压舵机是利用液体的不可压缩性及流量、流向的可控性达到操舵的目的。转叶式液压舵机是一种新型的液压舵机。它与其他类型的舵机相比,具有体积小、重量轻、结构简单、制造容易、维护保养方便等一系列优点。 一、国内外研究现状: 转叶式液压舵机至今已有近60年的历史,但这种新舵机并非所有从事船舶制造的国家都能生产,目前只有少数几个国家掌握了这门设计和生产技术。例如:德国、挪威、俄罗斯和日本等他们从二次世界大战后50年代初开始先后研究和生产这种新舵机。 德国AEG通用电气公司生产转叶式液压舵机已闻名世界并占垄断地位,产品较多,是目前远洋船舶上所经常选用的设备之一。该公司生产四种不同系列,分为RD型;RDC型;RC型;RB型。最高压力12.5MPa;最大扭矩890吨米。由于采用翻边式结构,金属条密封形式,结构合理,翻边受力变形量小,可使用较高压力,容积效率也较高。但是安装工艺较复杂(与端盖式比较),不过RBZ(RB)系列组装化程度较高,安全阀,电动机,油泵机组均安装在转叶油缸两侧,可整体套入舵轴(与舵轴联接方式均为套装式)。大大简化了船上安装工作量。英国布朗公司、日本三井公司、三菱公司和美国等国家凭德国AEG公司专利进行成批生产各种系列的转叶式液压舵机。挪威FRYDENBO公司生产的转叶式液压舵机,工作压力2.5MPa,安全阀调节压力为5MPa,最大扭矩为600吨米。液压系统是以螺杆泵做主泵的定量泵系统。由手动和电动液压操纵组成一体。该公司产品的特点是采用端盖式带凹形橡胶密封,与舵轴联接形式为套装式,转叶舵机固定在船壳底座上,无缓冲装置,由于其使用压力较低,采用高粘度油液,故使用可靠,安装、维护保养简单。俄罗斯于1959年在目前的乌克兰境内试制了首台转叶式液压舵机,并在1962年装在船上考验其性能,而后进行了批量生产。这种舵机的结构形式为端盖式,金属条密封,工作压力小于6.5MPa。与舵轴联接方式为对接式。 我国自1969年在广州研制成功第一台转叶式舵机以来,由于这种舵机具有一系列优点,因此发展很快。现在这种舵机品种规格很多,结构不一。有翻边式结构(江南造船厂);端盖
舵机的构造和原理
舵机的构造和原理 2008-06-20 08:50:29 来源: 作者: 【大中小】评论:0条 前言 舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。 本文章主要探讨适合各等级直升机各工作部位所使用的舵机,至於其它种类的模型,如飞机、车、船,则不在本篇文章讨论范围之内。 舵机的构造 舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已到达定位。 位置检测器其实就是可变电阻,当舵机转动时电阻值也会跟着改变,测量电阻值便可知转动的角度。 一般的伺服马达是将细铜线缠绕在三极转子上,当电流流过线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。舵机为求转速快、耗电小,於是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机。并且因应不同的负载需求,舵机的齿轮有塑胶及金属的区分。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。 目前新推出FET舵机,主要是采用FET(Field Effect Transistor)场效电晶体。FET具有内阻低的优点,因此电流损耗比一般电晶体少。
舵机的相关原理与控制原理
1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧:
这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。 为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。主要还是 delay memory这样的具有创造性的指令发挥了功效。该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只
舵机及转向控制原理
舵机及转向控制原理 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用丁船舶上实现其转向功能,由丁可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1、图2所示。
舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
变速齿轮组 诃调电位器小型宜流电机 fff 图4舵机的组成示意图 图5舵机组成 舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有 两种规格,一是4.8V, 一是6.0V,分别对应不同的转矩标准,即输出力矩不同, 6.0V 对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANW曲某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
输出转轴 电源线知 地线GND 控制线 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号, 控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘 转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进 行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到 目标停止。其工作流程为:控制信号T控制电路板T电机转动T齿轮组减速T舵盘转动T位置反馈电位计T控制电路板反馈。流,才可发挥舵机应有的性能。 舵机的控制信号周期为20MS的脉宽调制(PWM信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0—180度,呈线性变化。也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。舵机内部有一个基准电路,产生周期为20MS宽度1.5MS的基准信号,有一个比出较器,将外加信号与基准信号相比较,判断出方向和大小,从而生产电机的转动信号。由此可见,舵机是一种位置伺服驱动器,转动范围不能超过180度,适用丁那些需要不断变化并可以保持的驱动器中,比如说机器人的关 节、飞机的舵面等。
液压舵机工作原理
8-2液压舵机工作原理和组成 大型船舶几乎全部采用液压舵机。电动舵机仅用于一些小型船舶上。液压舵机是利用液体的不可压缩性及流量、流向的可控性来达到操舵目的的。根据液压油流向变换方法的不同,有两类:1)泵控型2)阀控型 1.泵控型液压舵机 图8—5示出泵控型液压舵机的原理图。 1—电动机,2—双向变量泵;3—放气阀,4—变量泵控制杆,5—浮动杆,6—储能弹簧,7—舵柄,8—反馈杆,9—撞杆,10—舵杆,11—舵角指示器的发送器,12—旁通阀,13—安全阀,14—转舵油缸,15—调节螺母,16—液压遥控受动器,17—电气遥控伺服油缸 双向变量油泵设于舵机室,由电动机1驱动作单向回转。油泵的流量和吸排方向,则通过与浮动杆5的C相连接的控制杆4控制。即依靠油泵控制C 偏离中位的方向和距离,来决定泵的吸排方向和流量。 泵控型液压舵机原理
图示舵机采用往复式转舵机构。由油缸14(固定在机座上)和撞杆9(可在缸中往复运动)等组成。当油泵按图示吸排方向工作时,泵就会通过油管从右侧油缸吸油,排向左侧油缸,撞杆9在油压作用下向右运动(油液可压缩性极小)。撞杆通过中央的滑动接头与舵柄7联接,舵柄7的一端又用键固定在舵杆10的上端。撞杆9的往复运动就可转变为舵叶的偏转。改变油泵的吸排方向,则撞杆和舵叶的运动方向也就随之而变。 1、工作油压与尺寸 舵机油泵工作油压取决于推动撞杆所需的力(转舵扭矩)。舵机最大工作压力(P max)是产生公称转舵扭矩时油泵出口油压。舵机油泵的额定排出压力不得低于舵机的P max。P max选得越高,转舵机构的主要尺寸就越小。油泵额定流量和管路直径相应减小,装置的尺寸和重量就会变小。 资料表明: 当P max由10MPa提高到20MPa时,往复式舵机长度大约缩短5%一10%,重量约可减轻20%,并使工作油液的使用量减少1/2左右。当P max从20MPa 提高到30MPa时,往复式舵机的长度几乎不变,重量只减轻6%~9%,而工作油液的使用量也仅减少16%~18%。进一步提高P max,对液压设备生产和管理要求更高,故目前液压舵机的最大工作油压,多不超过20MPa。 2、泵控型舵机-转舵速度 转舵速度:主要取决于油泵的流量,而与舵杆上的扭矩负荷基本无关。因为舵机油泵都采用容积式泵,当转舵扭矩变化时,虽然工作油压也随之变化,但泵的流量基本不变,对转舵速度影响不明显。进出港和窄水道航行时,用双泵并联,转舵速度几乎可提高一倍。 3、泵控型舵机-追随机构 多采用浮动杆式追随机构。浮动杆的控制点A系由驾驶台通过遥控系统控制。如把X孔的插销转插到Y孔之中,也可在舵机室用手轮来控制。浮动杆上
液压舵机的故障分析及处理措施
论文题目:液压舵机的故障分析及处理措施 二级学院:轮机工程学院 专业:轮机工程技术 目录 1 引言 2 液压舵机概述 2.1 液压舵机的基本工作原理 2.2 船舶建造规范对舵机的基本要求 3 液压舵机的故障分析 3.1 液压舵机无舵 3.2 液压舵机跑舵——稳舵时偏离所停舵角 3.3 液压舵机舵速太慢 3.4 液压舵机滞舵 3.5 实际舵角与操舵角不符 4 液压舵机故障的解决措施
4.1 检查应急舵的有效性------------------------------------------------7 4.2 检查舵角指示的准确性----------------------------------------------8 4.3 检查舵角限位器的有效性--------------------------------------------8 4.4 检查舵的液压系统的密封性能----------------------------------------8 4.5 检查液压油的品质--------------------------------------------------8 4.5.1 液压油性能指标一般应符合以下要求------------------------------8 4.5.2 液压油污染的主要原因------------------------------------------9 4.6 舵机检查的其他注意事项-------------------------------------------11 结论---------------------------------------------------------------------11 致谢-------------------------------------------------------------------12 参考文献-----------------------------------------------------------------13 1 引言 据资料介绍:船舶能够在水中按照驾驶员的意图航行,使船舶改变航向或维持指定航向,使依靠改变安装在船舶尾部的船舵的位置来实现的。舵对于船舶的重要性是不言而喻的,当船舶航行时船舵发生故障对船舶安全的影响是巨大的。对于舵机日常比较容易出现故障的情况,主要分为两大部分。一是属于硬件类故障,二是属于软件类故障。舵机的硬件类的故障是指与舵机相关的机器,设备发生了功能性的障碍,使得舵机不能正常工作发挥作用,常见故障有:1 通信类故障,2 电力系统故障,3 液压系统故障。软件类的故障是指与舵机运行有关的管理制度,船员对舵机的操作存在问题。通常主要是船员对应急舵的操作不熟悉,在需要的时候无法启动应急舵。因此加强对舵机的日常维护与保养对工作的可靠性和延长舵机的无故障寿命至关重要,轮机员必须依照使用说
(毕业论文)“育鲲”轮转叶式舵机工作原理和电气控制以及故障分析
摘要本文主要介绍为保证船舶安全航行,船舶舵机应满足那些条件。“育鲲” 轮上转叶式舵机的工作原理和转舵机构的介绍,以及舵机的电气控制。对变频器控制的转叶式舵机的转舵机构进行简单的叙述。校实习船的舵机控制分为自动、随动和手动三种方式。其中对各种控制方式做了比较详细的介绍。然后对舵机可能出现的问题进行故障分析及管理建议。 关键词:舵机舵机原理转舵机构电气控制故障分析 Abstract This paper mainly introducoed ship steering gear should satisfy those conditions, in order to ensure the safe navigation of ships. Steering gear working principle and the introduotion the turnning of the vane steering gear in “YUKUN ”.Wheel and steering gear electrical controls. Inverter control of the turn vane steering gear steering bodies briefly. Servo control of the school training vessel into automatic servo and control three ways. Which a more detailed introduction to the various control methods. At last, introducting steering gear problems that may occur for failure ,analysis and management proposals. Keywords :steering gear working principle turnning of the steering gear inverter control problem analysis