基于MC9S12XS128微控制器的智能车硬件设计

收稿日期:2009-07-01
稿件编号:200907001
基金项目:安徽省高等学校优秀青年人才基金项目(2009SQRZ159);合肥学院自然科学基金项目(08KY006ZR );
合肥学院重点实验室建设资助项目。
作者简介:刘伟(1979—),男,安徽寿县人,博士研究生。研究方向:智能控制与模式识别。
随着汽车电子业的迅猛发展,智能车作为电子计算机等最新科技成果与现代汽车工业相结合的产物,因其具有的智能特点而成为研究重点。“飞思卡尔”杯全国大学生智能汽车比赛在此背景下产生[1],竞赛规则规定,赛车在设定的赛道上能够自主行驶,并以最短的时间跑完全程者获胜。因此,智能车硬件不断创新以适应小车的速度要求。本文以MC9S12XS128为核心处理器,通过实验比较智能车各个模块电路设计方案,从而设计出性能稳定的硬件电路,经大赛实际检验性能良好稳定。
1系统整体方案设计
1.1智能车功能设计
根据大赛规则,智能车应具有路径识别、方向控制、速度控制、状态检测等功能,设计采用大赛指定的飞思卡尔16位微控制器MC9S12XS128单片机作为核心控制单元,利用CCD 摄像头作为识别路径的传感器,经MC9S12XS128MCU 的I/O 端口处理[2],控制赛车的运动决策,同时内部ECT 模块发出PWM 波,驱动直流电机及舵机对智能车进行速度控制和转向控制,为了精确控制赛车的速度,在智能车后轴上安装光电编码器,采集车轮转速的脉冲信号,经MCU 捕获后进行PID 自动控制,完成智能车速度的闭环控制。设计中应注意的原则:重心尽可能低、体积尽可能小、驱动尽可能大、结构尽可能简单。
1.2系统整体结构
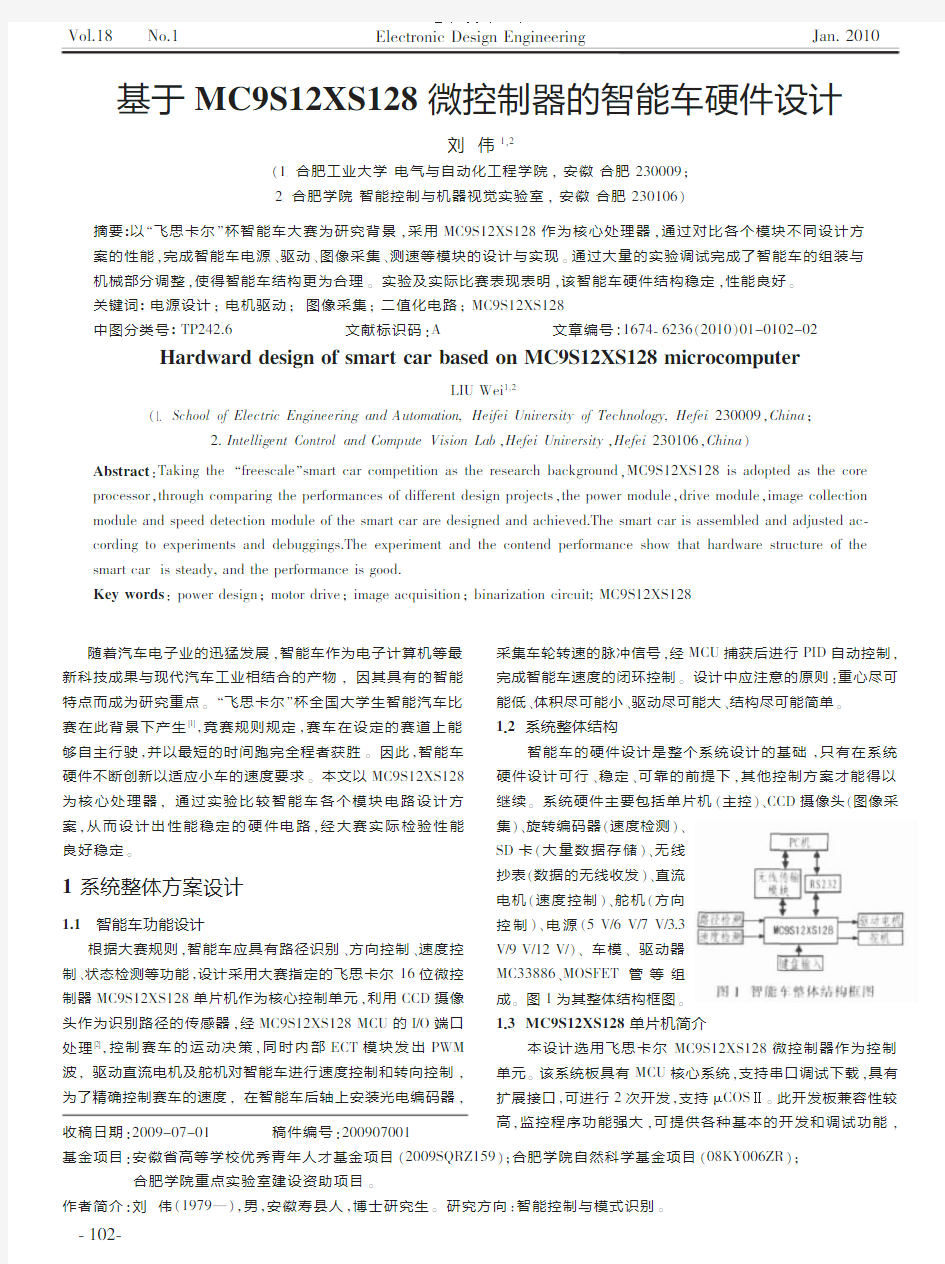
智能车的硬件设计是整个系统设计的基础,只有在系统硬件设计可行、稳定、可靠的前提下,其他控制方案才能得以继续。系统硬件主要包括单片机(主控)、CCD 摄像头(图像采集)、旋转编码器(速度检测)、
SD 卡(大量数据存储)、无线
抄表(数据的无线收发)、直流电机(速度控制)、舵机(方向控制)、电源(5V/6V/7V/3.3
V/9V/12V/)、车模、驱动器MC33886、MOSFET 管等组
成。图1为其整体结构框图。
1.3MC9S12XS128单片机简介
本设计选用飞思卡尔MC9S12XS128微控制器作为控制单元。该系统板具有MCU 核心系统,支持串口调试下载,具有扩展接口,可进行2次开发,支持μCOS Ⅱ。此开发板兼容性较高,监控程序功能强大,可提供各种基本的开发和调试功能,
基于MC9S12XS128微控制器的智能车硬件设计
刘伟1,2
(1.合肥工业大学电气与自动化工程学院,安徽合肥230009;
2.合肥学院智能控制与机器视觉实验室,安徽合肥230106)
摘要:以“飞思卡尔”杯智能车大赛为研究背景,采用MC9S12XS128作为核心处理器,通过对比各个模块不同设计方案的性能,完成智能车电源、驱动、图像采集、测速等模块的设计与实现。通过大量的实验调试完成了智能车的组装与机械部分调整,使得智能车结构更为合理。实验及实际比赛表现表明,该智能车硬件结构稳定,性能良好。关键词:电源设计;电机驱动;图像采集;二值化电路;MC9S12XS128中图分类号:TP242.6
文献标识码:A
文章编号:1674-6236(2010)01-0102-02
Hardward design of smart car based on MC9S12XS128microcomputer
LIU Wei 1,2
(1.School of Electric Engineering and Automation,Heifei University of Technology,Hefei 230009,China ;
2.Intelligent Control and Compute Vision Lab ,Hefei University ,Hefei 230106,China )
Abstract :Taking the “freescale ”smart car competition as the research background ,MC9S12XS128is adopted as the core processor ,through comparing the performances of different design projects ,the power module ,drive module ,image collection module and speed detection module of the smart car are designed and achieved.The smart car is assembled and adjusted ac -cording to experiments and debuggings.The experiment and the contend performance show that hardware structure of the smart car is steady,and the performance is good.
Key words :power design ;motor drive ;image acquisition ;binarization circuit;MC9S12XS128
图1智能车整体结构框图
2010年1月Jan.2010
第18卷第1期
Vol.18No.1
电子设计工程
Electronic Design Engineering
如程序的下载和运行、断点设置、内存显示等。还可利用
MC9S12XS128的Flash 在线编程技术实现在线写入用户程序
和随时修改Flash 存储内容。同时在线实时仿真和监测自编程序。根据实际设计需要分配控制器内部单元,如表1所示。
2各功能模块的设计与实现
智能车硬件系统主要包括电源、电机驱动、测速、舵机、
图像采集与处理等部分。
2.1电源模块设计
根据智能车的设计需求,需提供5V 电源为单片机、SD 卡、测速模块、PCB 板上电路、无线通讯模块等供电;6V 电源供给舵机,CCD 摄像头需12V 的工作电压。其中的难点是
12V DC -DC 升压电路。这里使用MC34063A 搭建由7.2V 升
压到12V 的升压电路。MC34063A 是单片双极型线性集成电路,专用于直流-直流变换器控制,内置占空比周期控制振荡器、驱动器和大电流输出开关,可输出1.5A 的开关电流。它能使用最少的外接元件构成开关式升压变换器,降压式变换器和电源反向器。图2为DC -DC 升压电路原理图。
2.2电机及舵机驱动模块设计
影响智能车速度的最关键因素是驱动力。“驱动力”不仅包括驱动电机,还包括电机驱动电路。电机驱动电路要能为赛车提供强大的动力,同时自身的功耗要小,能够保证在长时间大电流输出的情况下不升温且持续稳定工作。
根据PWM 调速电机驱动电路的性能指标,在实际制作过程中,主要采用以下两种方案:1)采用MC33886级联组成驱动电路;2)采用MOSFET 搭建H 桥电路。
考虑到MC33886输出电流有限,不能提供较为强劲的驱
动力,因此专门独立设计采用MOSFET 搭建的H 桥驱动电路。图3是直流电机PWM 调速系统框图。TD340和MOSFET 管组成H 桥驱动电路。
TD340是N 沟道功率MOSFET 管驱动器,适合
于直流电机控制[3]。
通过实验比较这两个方案设计的电路加速、制动、频繁启制动能力,发现两个电路各有其特点。MC33886级联组成驱动电路驱动电流上升快,适合起制动,但能耗大且稳定电流小;而MOSFET 管启制动较慢,但驱动电流大,适合直道行驶,功耗小。考虑到能耗问题,实际小车设计中采用MOSFET 管驱动方法。
舵机用来控制前轮的转向,配合后轮的驱动电机,使车体能够自由行驶。在智能车上,舵机的输出转角通过连杆传动控制前轮转向。舵机的输出转角介于-45°~+45°之间,在使用前需先测出各个角度所对应的PWM 波的占空比。
2.3测速模块设计
作为实现对智能车闭环控制的光电一个重要环节,测速
功能不可缺少。常用的测速方法有光电管测速法和光电编码器测速法。
实践证明,光电管检测方法成本低廉,容易实现,但精度较低,可靠性较差,容易受环境光影响,当车速达到3m/s 时,检测会发生问题。采用光电编码器成本虽然较高,但精度高,稳定性好。因此综合考虑,采用光电编码器检测电机速度[4]。
采用OMRON 公司生产的E6A2-CS100型光电编码器。它由5~12V 的直流供电,速度传感器通过后轮轴上的齿轮与电机相连,车轮每转1圈,速度传感器转过2.75圈。
2.4图像采集及处理模块设计
针对智能车比赛的实际环境状况,常用的图像数据采集方法有:A/D 转换采集方法和比较器的硬件二值化方法。
MC9S12XS128单片机的A/D 转换时间在不超频的情况下
最短为7μs [5],若选用分辨率为320线的摄像头,则单行视频信号持续的时间约20ms/320=62.5μs ,A/D 转换器对单行视频信号采样的点数将不超过(62.5/7)+1=9个。若使用分辨率为640线的摄像头,则单行视频信号持续的时间约20ms/
640=31μs ,A/D 转换器对单行视频信号采样的点数将不超过
(31/7)+1=5个。可见,分辨率越高,单行视频信号持续的时间就
越短,A/D 转换器对单行视频信号所能采样的点数就越少。如前所述,摄像头的分辨率越高,虽然可提高纵向分辨能力,但会减少单片机A/D 采样单行信号的点数,削弱横向分辨率。
摄像头的分辨率通常在300线以上,所以单行视频信号的持续时间最多20ms/300=66μs ,则A/D 采样每行视频信号的点数最多(66/7)+1=10个(不超频),这不满足赛车定位要求。所以采用A/D 采集图像时,摄像头分辨率不应太高。为保证采集图像点的准确性同时为图像处理留出更多时间,这里采用比较器实现二值化来代替A/D 采样方法实现数据采集[6]。
图2DC -DC 升压电路原理图
图3直流电机PWM 调速系统框图
(下转第105页)
刘伟基于MC9S12XS128
微控制器的智能车硬件设计
3结论
围绕MC9S12XS128单片机完成全国智能车大赛小车的硬件电路设计。通过实验比较各个模块电路的特点,选择性能较好的方案。通过硬件二值化电路完成对CCD摄像头图像采集与二值化的处理,节约了微处理的时间。通过比较常用的两种驱动电路的性能,选择出适合智能车竞赛的电路。实验表明整个小车驱动性能良好,图像采集快速,行驶稳定。该智能车在智能车大赛中表现良好。
参考文献:
[1]韩飞,陈放,戴春博.第三届飞思卡尔智能汽车比赛技术
报告[R].上海,2008.
[2]王威.HCS12微控制器原理及应用[M].北京:北京航空航
天大学出版社,2005.
[3]伊永峰,杨勇,张立勋.TD340芯片在直流调速系统中的
应用[J].电子设计工程,2004,12(3):48-49.
[4]王明顺,沈谋全.虚拟编码器在智能车上的应用[J].电子产
品世界,2004,12(2):126-128.
[5]安鹏,马伟.S12单片机模块应用及程序下载调试[J].电子
产品世界,2006,211(07S):162-163.
[6]蔡波.视频实时图像处理系统研究及设计[J].电视技术,
2005,5(275):23-25.
3SPR4096模块电路设计
针对存储器SPR4096,结合开发的简易烧写器,该烧写器配合PC机ResWriter工具(针对SPR4096开发的专用软件工具),通过EZ-probe下载线完成对SPR4096型存储器的擦除、写入、校验等功能。SPR4096的引脚SCK和SDA与支持SIO协议的SPCE061A单片机的IO端口IOB0和IOB1对应,实现SPR4096与单片机SPCE061A间的通信。SPR4096通过ResWriter工具对SPR4096存储器实现擦除、写入以及校验功能,方便地与单片机连接组成外扩存储器的系统。图3为SPR4096模块电路原理图。
4系统软件设计
本设计主要面向西藏地区的公交车,所以,藏、汉、英3种语音是必须考虑的。主程序是一个封闭的循环。IO端口初始化部分主要按照硬件资源分配对IO端口的状态进行初始设置,包括IO端口状态是处于
输入还是输出状态,是否设置上拉
等操作,这些都在IO端口初始化
子函数中完成。液晶初始化主要是
设置液晶显示部分的相关数据线、
控制线的状态。SPR4096初始化用
于设置串行传输速率以及CPU时
钟频率和相对应的IO端口的状
态。计时程序初始化用于打开计时
中断,一些与控制相关的全局变量
初始化也在该子函数中完成。主程
序流程如图4所示。
5结论
当系统工作在正常放电模式时,测试主控板消耗电流,在播报语音时主控板消耗的电流,最终测试结果:主控板消耗电流40.26mA;语音播放时系统消耗电流400mA。该电路能够稳定工作在直流5~7V的电源下,按键工作灵敏度高,系统响应速度快,语音采用SPY0030作为第1级放大,噪声滤除效果好,最终输出音色和音质都能满足实际需要。本系统将为西藏地区公交报站系统的信息化、人性化提供一个较好的解决方案,具有一定的推广前景。
参考文献:
[1]张大波.嵌入式系统原理、设计与应用[M].北京:机械工业
出版社,2004.
[2]韦东山.嵌入式Linux应用开发[M].北京:人民邮电出版
社,2009.
[3]张培仁,张志坚,高修峰.十六位单片微处理器原理及应
用[M].北京:清华大学出版社,2008.
[4]罗亚非.凌阳16位单片机应用基础[M].北京:北京航空航
天大学出版社,2006.
[5]康华光.电子技术基础模拟部分[M].5版.北京:高等教育出
版社,2006.
[6]杨素行.模拟电子技术基础简明教程[M].2版.北京:高等教
育出版社,2004.
图2系统硬件总体设计框图
图3SPR4096模块电路原理图
图4主程序流程
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(上接第103页)
李书荣,等基于SPR4096的藏、英、汉三语公交报站系统设计
智能交通系统设计方案
智能交通系统设计方案 随着经济建设的日新月异,经济的迅猛发展,现有的机动车和驾驶员增长快速与城市道路信息化管理建设的相对滞后,造成了现有的交通管理模式与急剧增长的交通需求不相适应,给公安交通管理部门带来了严峻的挑战,因此,建设智能交通信息化系统,为城市的经济发展增添后劲,切实解决城市的投资环境,制定城市现代化交通管理规划,采用先进的技术手段,实现科学管理已成为城市交通管理建设的当务之急。 目录 1.智能交通系统的目标 2.智能交通系统案例展示 3.智能交通系统的应用 1.智能交通系统的目标 智能交通系统(ITS)应用在城市交通中主要体现在微观的交通信
息采集、交通控制和诱导等方面,通过提高对交通信息的使用和管理来提高交通系统的效率,主要是由信息采集输入、策略控制、输出执行、各子系统间数据传输与通信等子系统组成。信息采集子系统通过传感器采集车辆和路面信息,策略控制子系统根据设定的目标运用计算方法(例如模糊控制、遗传算法等)计算出较好的方案,并输出控制信号给执行子系统(一般是交通信号控制器),以引导和控制车辆的通行,达到预设的目标。所谓智能交通,主要是通过综合手段,对城市道路通行进行智能化管理,包括根据通行情况实时指挥车辆通行顺序、疏导道路拥堵的智能化交通拥堵解决方案。 2.智能交通系统案例展示 “全国公路出行信息服务系统升级改造”项目,是基于英唐众创
方案公司研发的地图数据,整合多源交通出行信息数据、路网运行信息、高速公路运行信息、气象信息等各类动态信息,完成全国城际与主要城市交通流信息汇聚。全国公路出行信息服务系统的建成,将满足公众的出行信息服务需求;全国公路交通地理信息系统,将提供权威的电子地图服务;多源交通信息数据自动接入的实现,将完成全国城际与主要城市交通流信息的汇聚。 3.智能交通系统的应用 智能交通系统在充分整合、简化公安交警现有业务流程基础上,将先进的信息技术、数据通信技术、电子控制技术及计算机处理技术等综合运用于地面交通管理,建设面向交警业务,具备交通管理数据采集与分析、交通控制、交通管理辅助决策等功能的智能交通系统,
智能婴儿车设计报告样本
智能婴儿车设计报 告
智能制造论文 专业:机械设计制造及其自动化 学号: 学生姓名: 指导老师: 多功能智能婴儿车
一、简介: 本设计是涉及触摸感应和电磁感应的触摸感应式婴儿车智能刹车装置,哭声检测智能摇摆及报警装置,大小便检测报警装置,婴儿车智能追踪定位装置,手动可调摇篮摇摆频率装置。这些智能设计旨在防止婴儿车在有坡度的地方无人推行时发生溜动而造成的安全事故,而且跟踪定位婴儿车的位置,使婴儿车时时刻刻都在身边,哭声检测智能摇摆及报警装置和手动可调摇篮摇摆频率装置是用于减轻婴儿照看者的负担,不用时时刻刻守在婴儿旁边,大小便检测报警装置是为了提醒照看者婴儿是否大小便,方便照看者给婴儿换尿布。 本创造结构简单,安装方便,能实现婴儿车在有人控制时正常行驶,无人控制时停止锁住无法滑动,避免发生事故,而且提醒照看人婴儿车内婴儿的各种信息。 二、技术背景: 照顾孩子的父母或是保姆不可能时时刻刻待在孩子身边,特别是在晚上,而且人们不可能因为孩子其它事什么都不做。基于以上几点我们设计出了智能婴儿车,它能帮助父母花更少的时间更好得照顾好婴儿,使婴儿更加健康茁壮的成长,而且能在照顾好孩子的同时做些家务及一些其它事情。智能婴儿摇篮能够提供给宝宝舒适摇晃,又能够经过自动移动和自动避障及自动追踪,使得妈妈们也可腾出手来处理家务或者休息。从而大大的减轻了
婴幼儿父母的劳动负担。 婴儿车是一种为婴儿户外活动提供便利而设让的工具车,有各种车型,一般0到4岁的孩子用的是婴儿车,是宝宝最喜爱的散步交通工具,更是妈妈带宝宝上街购物出游时的必须品,而当今的婴儿车的刹车装置方面还存在一定的缺陷,使得婴儿车存在一定的安全隐患。 由于婴儿车停放位置不当或婴儿的活动等其它原因,婴儿车可能会发生溜动,从而引发意外事故,而婴儿坐在婴儿车内不具有制止婴儿车运动的能力以致发生碰撞而导致惨剧发生。现已发生多起因为家长的疏忽导致的婴儿车滑动引起的安全事故。因此安全性是购买婴儿车的最重要的指标,如果婴儿车不具备很强的安全性,就极其容易伤害到脆弱的婴儿。因此出于安全因素的考虑,婴儿车应具有自动制动的能力,特别是在无人看管时。 现有的婴儿车安全装置旨在人工制动,需要在停放时人工打开刹车,可是很多家长往往意识不到安全隐患的存在从而忽略这个步骤,导致安全事故的发生,因此现在的婴儿车安全装置并不能解决无人看管时引发的安全隐患。 该创造正是要实现婴儿车智能化,具有很强的可控性,很大程度上减少了安全隐,很大地提高婴儿车的安全性,这个设计的应用范围较广,同样也能够用于残疾人的推车等。该设计轻巧方便,功耗低,成本较低,具有很高的实用性。 三、关键词:
智能交通建设系统总体设计
智能交通建设系统总体设计 1.1 总体设计原则 在本次系统的总体设计中,要求在总结同类型项目建设经验的基础上,统筹规划,将遵循以下总体设计原则。 ?标准性 本系统与其它应用系统和数据库之间存着大量的数据交互,因此强调信息系统的标准化,系统应保证与现行业务系统实现有效的衔接,实现信息的共享和集成。在系统建设中将遵循各类业界标准,从数据结构、技术架构、数据库存储等多个方面标准化建设。 ?先进性 采用当前成熟且先进的技术,保持系统硬件、软件、技术方法和数据管理的先进性,保证系统建成后在技术层次上3~5年内不落后。同时具有较强的可移植性、可重用性,在将来能迅速采用最新技术,以长期保持系统的先进性。 ?可靠性 一是以可靠的硬件、成熟的软件产品为基础,结合具体需求进行配置、定制和二次开发的方式进行实施,保证有效缩短项目实施时间,降低项目实施的风险。 二是系统应能够支持较大并发用户同时进行浏览、操作等与数据库的交互式的操作,并且相对占用较少的硬件资源。当意外事件发生时,能通过快速的应急处理,实现故障
修复,保证数据的完整性,避免丢失重要数据。 三是系统应具有较强的应变能力和容错能力,确保系统在运行时反应快速、安全可靠。 ?安全性 一是保证系统的安全性。首先,选择先进、可靠的主流硬件产品和成熟、领先的软件产品构建系统,为系统的安全性奠定良好的基础;其次,必须考虑到各种特殊情况下的恢复机制和备份机制,以保证数据的一致性、完整性以及灾难恢复;再次,严格管理制度,为系统安全性提供制度保证。 二是完整的权限控制机制、考虑充分的系统保密措施也是保证安全的重要因素。需依据信息访问权限,向用户提供授权查询,有效避免越权使用。 系统后台用户分层次管理,并且具有可灵活调整、可细分的权限控制。可对信息内容进行严格的角色权限管理,保证每个用户能够看到且只能看到自己权限范围内的所有信息。对系统的管理操作有详实的历史记录。 ?扩展性 系统真正符合多层浏览器/服务器体系结构,不仅基于当前的需求,而且应保证在系统的体系结构不需做较大改变的前提下,实现今后的平滑升级。主要包括以下几个层次:数据的扩展:可以利用可视化的工作界面,进行数据的添加,或通过数据库管理工具,创建新的数据库、词典。 应用的扩展:考虑到和其它信息系统的连接,系统应具有良好的外接接口,将来随着业务的不断扩充,整个系统中应能够方便地添加新的业务模块;利用开放标准的应用开发接口可以进行更加个性化的二次应用开发。 ?易用性 系统应具有一致的、友好的客户化界面,易于使用和推广,并具有实际可操作性,使用户能够快速地掌握系统的使用。除特殊的、必须的应用外,用户终端全部采用浏览器方
智能交通系统完整解决规划方案.docx
智能交通系统解决方案
目录 一、概述 ........................................................错误 !未定义书签。 二、智能交通系统总体设计 .........................................错误 !未定义书签。 1.智能交通系统建设必要性 .........................................错误 !未定义书签。 2.智能交通系统建设目标 ...........................................错误 !未定义书签。 3.智能交通系统整体架构 ...........................................错误 !未定义书签。 4.智能交通系统应用架构图 .........................................错误 !未定义书签。 三、主要子系统应用设计 ...........................................错误 !未定义书签。 1.高清卡口系统 ...................................................错误 !未定义书签。 2.高清电子警察系统 ...............................................错误 !未定义书签。 3.道路监控系统 ...................................................错误 !未定义书签。 4.信号灯控制系统 .................................................错误 !未定义书签。 5.交通诱导和信息发布系统 .........................................错误 !未定义书签。 6.智能公交系统 ...................................................错误 !未定义书签。
基于STM32 智能抓物小车的设计 电子设计II课程报告
摘要 本实验主要分析把握对象的智能车基于STM32F103的设计。智能系统的组成主要包括STM32F103控制器、伺服驱动电路、红外检测电路、超声波避障电路。本试验采用STM32F103微处理器作为核心芯片,速度和转向的控制采用PWM技术,跟踪模块、检测、障碍物检测和避免功能避障模块等外围电路,实现系统的整体功能。 小车行驶时,避障程序跟踪程序,具有红外线跟踪功能的汽车检测电路。然后用颜色传感器识别物体的颜色和抓取。在硬件设计的基础上提出了实现伺服控制功能,简单的智能车跟踪和避障功能的软件设计和控制程序,在STM32集成开发环境IAR编译,并使用JLINK下载程序。 关键词:stm32;红外探测;超声波避障;颜色传感;舵机控制
ABSTRACT This experiment mainly analyzed the grasping object intelligent car based on STM32F103 design. The composition of the intelligent system mainly includes STM32F103 controller, servo drive circuit, infrared detection circuit, ultrasonic obstacle avoidance circuit. This test uses the STM32F103 microprocessor as the core chip, the speed and steering control using PWM technology, tracking module and detection, obstacle avoidance module for obstacle detection and avoidance function, other peripheral circuit to achieve the overall function of the system. The car is moving, obstacle avoidance procedures prior to tracking program, car tracking function with infrared detection circuit. Then use color sensor to recognize object color and grab. On the basis of the hardware design is proposed to realize the servo control function, simple intelligent car tracking and obstacle avoidance function of the software design, and the control program is compiled in the STM32 integrated development environment IAR, and download the program using Jlink. Key words: STM32; infrared detection; ultrasonic obstacle avoidance; color sensing; steering control
智能交通项目总体设计
智能交通项目总体设计 项目建设范围 1.1系统建设内容设计电子警察子系统、卡 口子系统、高清监控子系统、智能违停抓拍子系统、交通诱导子系统、GPS子系统、大屏幕子系统等多方位,多功能建设。 项目总体规划 1.2面向设备的远程监控与管理 1.2.1远程设备监控与管理能够从中心平台实时监控设备的运行状态,当设备运行状况出现异常时及时中心平台消息报警,能够帮助用户定期安排设备的检修维护与管理,并合理保有备品备件。同时,为用户提供各种统计数据,帮助用户进行科学的决策。平台系统能够显著提高跨分区、分布式设备的管理和运行水平,提高平台在系统建设应用的中的综合利用率,实现对业务管理与应用的综合性能。 面向数据的存储管理与信息挖掘 1.2.2数据的存储管理与 信息挖掘体现在对海量数据的有效存储方式上,基于IP-SAN 模式的存储系统具有严谨而高效的数据陈列能力,将结构化数据进行非结构化的存储模式展现了在存储技术上的领先性,数据的存储空间是没有提前严格进行盘位的分区划分的,但是在逻辑上很进行了很严密的代码管理与数据的位置标识,在这样的存储系统中每一条数据都有着自己独有的身份特征,可以按照包头与包体的结构进行
综合管理。信息的挖掘往往需要通过很复杂的逻辑判断搜索到有用且有效的数据信息,宇视的数据管理系统,可以在3秒的时间内通过模糊算法技术,在上亿条机动车数据中查询到具体的单一车辆信息。多条件查询的情况下,在上亿条数据中也只需10秒以内就能够完成。先进的数据存储模式以及快速、准确的信息挖掘技术将使我们的用户提高对数据的敏感度与执行力的准确性。 面向事件的应急指挥 1.2.3事件的应急指挥是应急响应过程的一个核心环节,是应急决策与处理的中枢神经,其作出的决策是各应急处置力量参与应急行动的指南,是决定应急处置高效与快捷的核心因素。突发事件现场应急指挥是现场指挥及指挥部对救援行动进行的组织领导活动,其核心是指挥决策,即现场指挥活动是围绕着制定决策和实现决策而展开的。由于现场指挥活动是在与迅速发展的险情及其危害的对抗中进行的,因而具有风险性大、时效性强和机断性高的特点。 我方平台可以与GIS系统进行融合,将前端点位在GIS上进行呈现。通过电子围栏和可视化点播的方式呈现区域设备点位及点位前端现场实况视频,通过GIS系统对配置有GPS定位设备的警员给予单点、多点、区域的指挥调度,通过GIS 实时了解警力部署状态,结合实时视频对第一手现场资料予以把握,电子警察与卡口系统可以进行区域、线路的综合稽
汽车车速检测系统设计
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (2) 1 论文综述 (2) 1.1 车速检测系统的背景和意义 (2) 1.2 车速检测系统的发展前景 (3) 2 车速检测系统的设计思路 (3) 3 系统单元模块选型 (3) 3.1传感器选择 (3) 3.2 单片机选型 (4) 3.3 显示模块的选型 (4) 3.4 报警电路选择 (5) 3.5 程序语言的选择 (5) 4 系统硬件设计 (6) 4.1 AT89C51主控电路 (6) 4.1.1 AT89C51的管脚说明 (6) 4.1.2 复位电路 (7) 4.1.3 晶振电路 (8) 4.1.4 存储器AT24CO2 (9) 4.2 传感器电路模块介绍 (9) 4.2.1 霍尔式车速传感器 (10) 4.2.2 霍尔传感器的特性 (11) 4.2.3 霍尔传感器引脚说明 (12) 4.2.4 霍尔传感器车速测量原理 (12) 4.2.5 霍尔传感器的转速测量方法 (12) 4.2.6 霍尔传感器设计电路 (12) 4.3 显示模块的介绍 (13) 4.3.1 LED数码管介绍 (13) 4.3.2 LED数码管特性 (13)
4.3.3 74HC573作用………………………………………………………………………… 13 4 4.3.4 显示电路 (13) 4.4 DM74LS14工作原理 (17) 4.4.1 信号处理电路设计 (17) 4.5 硬件总体设计 (17) 5 软件设计 (19) 6 总结 (19) 参考文献 (20) 附录A (21) 附录B (22) 致谢 (29)
智能婴儿车设计报告材料
智能制造论文 专业:机械设计制造及其自动化 学号: 学生姓名: 指导老师:
多功能智能婴儿车 一、简介: 本设计是涉及触摸感应和电磁感应的触摸感应式婴儿车智能刹车装置,哭声检测智能摇摆及报警装置,大小便检测报警装置,婴儿车智能追踪定位装置,手动可调摇篮摇摆频率装置。这些智能设计旨在防止婴儿车在有坡度的地方无人推行时发生溜动而造成的安全事故,并且跟踪定位婴儿车的位置,使婴儿车时时刻刻都在身边,哭声检测智能摇摆及报警装置和手动可调摇篮摇摆频率装置是用于减轻婴儿照看者的负担,不用时时刻刻守在婴儿旁边,大小便检测报警装置是为了提醒照看者婴儿是否大小便,方便照看者给婴儿换尿布。 本发明结构简单,安装方便,能实现婴儿车在有人控制时正常行驶,无人控制时停止锁住无法滑动,避免发生事故,并且提醒照看人婴儿车内婴儿的各种信息。 二、技术背景: 照顾孩子的父母或是保姆不可能时时刻刻待在孩子身边,特别是在晚上,而且人们不可能因为孩子其他事什么都不做。基于以上几点我们设计出了智能婴儿车,它能帮助父母花更少的时间更好得照顾好婴儿,使婴儿更加健康茁壮的成长,而且能在照顾好孩子的同时做些家务及一些其他事情。智能婴儿摇篮可以提供给宝宝舒适摇晃,又可以通过自动移动和自动避障及自动追踪,使得妈妈们也可腾出手来处理家务或者休息。从而大大的减轻了婴幼儿父母的劳动负担。
婴儿车是一种为婴儿户外活动提供便利而设让的工具车,有各种车型,一般0到4岁的孩子用的是婴儿车,是宝宝最喜爱的散步交通工具,更是妈妈带宝宝上街购物出游时的必须品,而当今的婴儿车的刹车装置方面还存在一定的缺陷,使得婴儿车存在一定的安全隐患。 由于婴儿车停放位置不当或婴儿的活动等其他原因,婴儿车可能会发生溜动,从而引发意外事故,而婴儿坐在婴儿车内不具有制止婴儿车运动的能力以致发生碰撞而导致惨剧发生。现已发生多起因为家长的疏忽导致的婴儿车滑动引起的安全事故。因此安全性是购买婴儿车的最重要的指标,如果婴儿车不具备很强的安全性,就极其容易伤害到脆弱的婴儿。所以出于安全因素的考虑,婴儿车应具有自动制动的能力,特别是在无人看管时。 现有的婴儿车安全装置旨在人工制动,需要在停放时人工打开刹车,但是很多家长往往意识不到安全隐患的存在从而忽略这个步骤,导致安全事故的发生,所以现在的婴儿车安全装置并不能解决无人看管时引发的安全隐患。 该发明正是要实现婴儿车智能化,具有很强的可控性,很大程度上减少了安全隐,很大地提高婴儿车的安全性,这个设计的应用范围较广,同样也可以用于残疾人的推车等。该设计轻巧方便,功耗低,成本较低,具有很高的实用性。 三、关键词: 婴儿车哭声检测尿床检测室内自由移动智能跟踪自动摇摆智能刹车
智能小车硬件系统-STM32最小系统
智能小车硬件系统设计-STM32最小系统 1.智能小车的车体结构选择 目前常用的移动机器人运行机构的方式有轮式、履带式、腿式以及上述几种方式的结合。轮式和履带式机器人适合于条件较好的路面,而腿式步行机器人则适合于条件较差的路面。为了适应各种路面的情况,可采用轮、腿、履带并用。在各种实用的移动机器人中以轮式机器人,最为常见,它具有悠久的历史,在机械设计上非常成熟。本文中智能小车的设计思想是作为在路面环境较好的场合中工作的机器人使用,所以采用轮式机器人。机器人车体由车架、蓄电池、直流电机、减速器、车轮等组成,它是整个小车的基础部分。 从轮式移动机器人的车轮个数来说,常用的为三轮或四轮,更多轮的机器人则多见于可变构形的移动机器人应用。四轮机构在稳定性方面强于三轮机构。而一般轮式移动机器人转向装置的结构通常有两种方式,第一种方式是使用舵机转向,在此方式下前轮是自由轮,后轮是驱动轮,使用一个电机进行驱动,转向使用舵机控制转向轮前轮实现另外一种方式使用差动控制转向,与舵机转向相同的是,后轮是驱动轮,但左、右轮使用独立的电机驱动,前轮为自由轮,转向通过控制左右驱动轮速度的方式实现。综合考虑到智能小车承载能力、稳定性以及转向精度的要求,系统采用了四轮差动转向式,其中后部两轮为驱动轮,前部两轮为随动万向轮。 2.智能小车控制系统方案 在整个智能小车系统的总体设计之中,控制系统是最重要的,它是整个系统的灵魂。控制系统的先进与否,直接关系到整个机器人系统智能化水平的高低。机器人的各种功能都在控制系统的统一协调前提下实现,控制系统设计的策略也决定了整个机器人系统的功能特点及其可扩展性。本文设计的智能小车控制系统,具备了障碍物检测、自主定位、自主避障、总线通信、无线通信等一系列功能。根据上述所提及的智能小车的功能要求,课题研究的控制系统主要包括电源模块、微控制器模块、障碍检测模块、电机驱动模块、速度检测模块、通讯扩展模块等部分。系统总体框图如图1所示。具体设计过程中,各模块硬件以及软件部分力求相对独立,为日后的更新和后续升级提供便利。
智能小车设计报告
智能小车 学校:江汉大学 学院:物信学院 班级、姓名: 10通信曹聪慧 10自二彭洋
摘要: 本系统采用STC89C52作为主控制芯片,采用7805作为稳压芯片,采用L9110芯片作为直流电机驱动,在PWM 控制下,小车自动寻路,快慢速行驶和转向。三者的结合使小车更加智能化,自动化,并用霍尔元件测速,用1602液晶把速度显示出来。电路结构简单,可靠性能高。 关键词:STC89C52单片机、PWM调速、自动循迹,测速
目录 1.系统方案 (4) 1.1 车体设计 (4) 1.2 控制器模块 (4) 1.3电机模块 (4) 1.4电机驱动模块 (5) 1.5测速模块 (5) 1.6电源模块 (5) 1.7最终方案 (6) 2.系统硬件设计 (7) 2.1电源模块的设计 (7) 2.1控制模块的设计 (6) 2.1循迹模块的设计 (6) 2.1电机驱动模块的设计 (7) 2.1测速模块的设计 (7) 3.软件程序的设计 (10) 3.1总体流程图 (10) 3.2软件大体思路 (10) 4.系统功能测试 (9) 4.1 问题分析及解决 (10) 5.总结 (12) (附录)
系统方案 1.1 车体设计 自己制作电动车。一般的说来,自己制作的车体比较粗糙,性能不太稳定。但只要对车体仔细制作,通过优良的控制算法,也能实现控制小车前进转弯的功能。 1.2 控制器模块 采用STC公司的STC89C52单片机作为主控制器。STC89C52是一个低功耗,高性能的51内核的CMOS 8位单片机,片内含8k空间的可反复擦些1000次的Flash只读存储器,具有256 bytes的随机存取数据存储器(RAM),32个IO口,2个16位可编程定时计数器。且该系列的51单片机可以不用烧写器而直接用串口或并口就可以向单片机中下载程序。我们自己制作51最小系统板,体积很小,下载程序方便,放在车上不会占用太多的空间。 1.3电机模块 方案一:采用步进电机实现物体的精确定位和方向控制。步进电机可以作为一种控制用的特种电机,可以精确地控制角度和距离。缺点是相对体积较大,力矩比较小,容易失步,而且价格比较昂贵。 方案二:采用普通直流电机。直流电机运转平稳,精度有一定的保证。直流电机控制的精确度虽然没有步进电机那样高,但完全可以满足本题目的要求。通过单片机的PWM输出同样可以控制直流电机的旋转速度,实现电动车的速度控制。并且直流电机相对于步进电机
XX市智能交通系统设计方案
XX智能交通项目设计方案
目录
第1章项目总论 1.1项目建设背景 随着XX市经济的飞速发展,近年来城市地区人口和机动车保有量迅猛增长,城市安全管理、交通供需矛盾逐渐突出,因此对城市管理提出了更高的要求。为减轻城市的交通拥堵现象、降低交通事故的发生率、有效地进行交通视频监控、及时准确地进行非现场执法,XX交警部门积极地利用当今先进适用的技术,规划对中心平台系统、电子警察、卡口、监控等各子系统进行建设以实现技术强警的各项具体目标。 我方根据XX市综合治理、科技强警的需求,以及现场实际情况对城市治安监控及城市智能交通系统建设项目进行设计,严格遵照国家、公安部以及XX市的相关技术标准、规程,综合运用电子信息、计算机网络、视频监控等领域的前沿技术进行制定,充分考虑到系统建成后在使用、维护保养及系统扩展等方面的方便性、经济性等要求,最终的工程将达到一方建设、多方受益、灵活扩展的目的。 通过本期项目的建设可以从政治上、经济上符XX市进一步深化改革开放的需要,符合政府职能的转变和社会进步的需要。实践证明,要缓解日益增长的交通管理压力,维护人民群众安定平和的出行和治安环境,快速接警处警,应对可能出现的突发事件,提高管理和服务效率,仅靠增加警力的数量扩张是远远不行的,必须走质量扩张即科技强警之路,实现管理模式由体能型向智能型、管理方式由经验型向科技型、管理手段由管理型向管理服务型转变和飞跃,才能与政府职能的转变保持同步,更加密切把握住社会进步的脉搏。通过此项目的成功建设,对于发掘呼伦贝尔市潜在经济和社会效益,提升城市形象和地位,将产生难以估量的正面影响和积极意义。 1.2项目现状 1.2.1平台部分 基于上千路的外场子系统点位建设的基础上,平台的中心设备显示出宇视
物联网智能交通方案设计
物联网智能交通系统 建设方案
目录 一、物联网信息平台 (3) 1.1 物联网信息平台简介 (3) 1.2 物联网信息平台创新点 (3) 1.3 产品优势及特点 (4) 1.4 物联网信息平台设备清单 (6) 二、智能交通系统 (6) 2.1 系统概述 (6) 2.2 系统技术方案 (8) 2.3 智能小车系统 (8) 2.4 道路交通管理系统 (9) 2.5 路灯自动控制系统 (11) 2.6 ETC系统 (11) 2.7 智能停车系统 (12) 2.8 城市照明系统 (13) 2.9 支持的实验 (14) 2.10 智能交通实训系统设备清单 (15) 三、配置清单及规格参数 (16)
一、物联网信息平台 1.1 物联网信息平台简介 物联网信息平台以光载无线交换机和上层应用程序为核心,构建WiFi无线局域网,覆盖物联网实验室及其周边区域,配合实验室现有的有线网络交换机、网络路由器,建立融合有线网络、无线局域网络的物联网关键部分——网络层。 物联网信息平台是物联网综合应用实训室整体解决方案的核心和基础,在此基础上配合解决方案中的其他物联网接入设备和控制设备可以实现物联网基础教学、物联网基础实验、无线传感器网络教学、RFID技术的应用、传感器的学习及应用、智慧教室、物联网创新应用等功能,学生可亲身真实体验和感受到物联网技术给未来生产和生活带来的改变。 图(4)物联网信息平台组网图 1.2 物联网信息平台创新点 以物联网信息平台为核心构建的物联网综合应用实训室在实验教学、学生学习、教学管理、科学研究等方面都有创新: 实验室建设的创新 以工程实践为背景,将物联网感知层、网络层、应用层等3层架构清晰、完整地体现出来,构建整体化的物联网综合应用实训室,实现系统内的物与物、物与人的泛在链接,使各个实验区和实验设备不再是信息孤岛;
区间测速方案分解
卡口区间测速系统设计方案 设 计 方 案 书 技术股份有限公司 二00九年五月
1 区间测速系统 1.1概述 传统超速抓拍系统采用的是单点测速方式,测量的是车辆的瞬时速度,争议较大、容易躲避。区间测速是在高速公路某一区间(一般为20公里左右)的两端安装自动抓拍系统,记录车辆通过两端的时间,利用“速度=距离/时间”公式,计算出车辆在该区间内的平均车速。为达到满意的效果,抓拍系统应具有很高的车辆捕获率和识别正确率。区间测速让驾驶员难以回避,做为处罚超速违法行为的法律依据将更有说服力。区间测速与单点测速相比有如下优势: 1.监控范围大。区间测速系统由于对监控路面进行长距离监控,对该区间内行驶的机动车进行全程监控,扩大了超速监控的范围,控制了区间内整体的行车速度。 2.测速精度高。区间距离为两个监测断面之间的距离,通过激光测量标定,距离误差几乎为零;机动车行驶时间为经过两个监测断面的时间差,所有断面点设备时间同步,并采用GPS时钟校时,时间误差小。 3.“反监控”能力强、监控效果显著。机动车驾驶员常利用电子狗等高科技设备提前发现电子警察并进行逃避;在单点测速或监控点周边地段刹车减速,经过监控点后继续超速行驶;这类具有反监控能力的违法超速车,在区间测速系统监控下将无所遁形。 4.说服力强,更容易被理解和接受。区间测速系统测速原理简单,精度高,监控范围为全区间,控制区间内的平均车速,更容易被驾驶人接受。 5.可拓展性更强。根据应用的需要,区间测速系统可以扩展更多的应用功能,如:道路监控功能、治安(交通)卡口功能、交通流采集功能、非法占用路肩等违法取证功能(路肩加设备)、交通诱导功能(加诱导屏)等。
智能交通施工方案
智能交通施工方案 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
施工组织计划 第一章工程概况及施工组织机构 1.1 编制依据 本实施组织计划根据三山区安全监督局的需求以及施工现场目前道路设计状况的调查资料,结合以往我公司相似类型工程的施工经验及有关的施工规范进行编制。 1.2 工程概况 当今社会各行各业的现代化管理需要运用先进的科学技术手段,将电子技术与计算机控制集成在一个完整的体系中。在社会交通里,安全是首要需保障的问题。利用现有的监控保安设备,可有效的加强对车辆的管理,直观及时的反映重要地点的现场情况,增强安全保障措施。是社会现代化管理的有力工具。 在系统设计中,我们本着网络化、数字化结合实际情况的指导思想。建立一个连接监控中心的支持ADSL传输的网络来传输图像、声音,控制信号和数据等。用户可通过远程控制室来观看、监督现场情况等相关操作。 现代化管理体现在办公管理自动化,监控管理自动化等方面,充分利用先进的信息技术及设备,以解决部分人员不足,过多暂用人力资源等诸多问题。 1.2.1 工程位置及规模 现场位于三山区区政府旁边二个路口,本次工程主要是对路口区域进行集中安防监控。 现场主要分2个路口的设备,一个路口的视频监控,另一个路口的视频监控、电子警察。要求实现施工布线美观大方,所有线路全部埋地,本地监控无死角,以及全天候红外夜视监控等功能需求。 1.3 施工组织机构我公司针对该项目成立专门项目组,并实行项目经理负责制,确定项目负责人1人,全面协调该项目一切事宜,对该项目范围内发生的一切事宜有决定权和否决权。 第二章施工总体部署及布置 2.1 施工总体部署 本工程的施工要做到不影响道路的正常通行及相关工作人员工作。本工程的施工可以分为四大部分: 第一部分:隐蔽工程的实施,管槽的制作及管材的安装; 第二部分:线缆的敷设与测试; 第三部分:所有网络(摄像头,视频,机柜)系统设备的安装调试;
城市智能交通系统总体设计
目录 背景及需求4 形势及背景4 机动车出行需求不断增加,时间及空间分布模式转变4 城市化进程加快,交通建设及管理并重4
打击多样化交通违法行为,维持交通管理秩序4 打造绿色交通、节能减排的人居城市4 ITS信息服务体系形成新架构5 构建人性化执法服务环境,合理规划勤务信息5规划定位5 强化指挥中心职能,紧密围绕“六大业务核心”开展城市ITS建设5 依托城市已建成及规划格局,细分业务重点,构筑城市ITS感知网格6 “打基础、上业绩、出成效”三年三大步,合理推进城市ITS进程6 以人为本,推进人、车、路、环境协同发展7规划目标7 提升全城路网实时态势监控和交通秩序监管水平7 打造全城一体的城市智能交通数据中心7 提升交通管理分析的智能化程度,加强涉牌违法目标车辆的打击能力8 提升应急指挥协作水平,加强应急处突综合调度能力8 提升道路科学辅助决策能力,优化路网渠化、信号配时等交通管理措施8
增加互联网+智能交通应用,增加道路交通信息交互能力,提升城市交通形象9 提高系统运维和数据运维的自主分析能力,提高智能交通系统健壮性9 提升业务需求迅速转换为实际系统建设落地的能力,打造城市交通管理亮点9 系统总体设计10 城市智能交通总体建设规划10 围绕六大业务核心开展ITS子系统建设12 以人为本开展交通信息交换平台建设34
背景及需求 形势及背景 机动车出行需求不断增加,时间及空间分布模式转变 公众机动车出行需求不断增加、时间及空间分布模式转变、交通拥堵范围及程度扩大,需要ITS构建宏观调控手段。 城市化进程加快,交通建设及管理并重 城市化进程加快,交通建设及管理并重,在大规模进行城市交通基础设施建设的同时,需要ITS软环境为城市交通可持续发展提速。 打击多样化交通违法行为,维持交通管理秩序 面对日益严峻的交通管理需求,通过开展多种专项整治活动,打击机动车闯红灯、行人闯红灯、机动车斑马线不礼让行人、非法占用公交车道、道路逆行压线等行为,规范出行交通新秩序。 打造绿色交通、节能减排的人居城市 打造绿色交通、节能减排的人居城市,引进先进的IT手段,通过交通物联网等技术,缓解交通拥堵、提高出行效率、减少交通事故、降低交通污染,实现“智慧交通、低碳出行”。
智能小车系统项目设计方案
智能小车系统项目设 计方案 第一章引言 1.1 智能车研究背景 1.1.1发展历史 智能小车系统是迷你版的智能汽车,二者在信息提取,信息处理,控制策略及系统搭建上有很多相似之处,可以说智能小车系统将为智能汽车提供很好的试验和技术平台,从而推动智能汽车的发展。 智能汽车是未来汽车的发展方向,将在减少交通事故、发展自动化技术、提高舒适性等许多方面发挥很重要的作用;同时智能汽车是一个集通信技术,计算机技术,自动控制,信息融合技术,传感器技术等于一身的行业,它的发展势必促进其他行业的发展,在一定程度上代表一个国家在自动化智能方面的水平[1]。汽车在走过的100多年的历史中,从没停止过智能化的步伐,进入20世纪90年代以来,随着汽车市场竞争激烈程度的日益加剧和智能运输系统(ITS)的兴起,国际上对于智能汽车及其相关技术的研究成为热门,一大批有实力有远见的大公司、大学和研究机构开展了这方面的研究。很多美国、日本和欧洲等国家都十分重视并积极发展智能车系统,并进行了相关实验,取得了很多成就。我国的相关研究也已经开展,清华大学成立了国最早的研究智能汽车和智能交通的汽车研究所,在汽车导航、主动避撞、车载微机等方面进行了广泛而深入的研究,2000年智能交通系统进入实质性实施阶段,国防科大研制出第四代无人驾驶汽车,西北工业大学、交通大学、大学等也展开了相关研究。这一新兴学科正在吸引越来越多的研究机构和学者投入其中。
1.1.2 智能车的应用前景 智能车系统有着极为广泛的应用前景。结合传感器技术和自动驾驶技术可以实现汽车的自适应巡航并把车开得又快又稳、安全可靠;汽车夜间行驶时,如果装上红外摄像头,就能实现夜晚汽车的安全辅助驾驶;此外,智能车系统还可以工作在仓库、码头、工厂或危险、有毒、有害的工作环境里,并能担当起无人值守的巡逻监视、物料的运输、消防灭火等任务。在普通家庭轿车消费中,智能车的研发也是很有价值的,比如雾天能见度差,人工驾驶经常发生碰撞,如果用上这种设备,激光雷达会自动探测前方的障碍物,电脑会控制车辆自动停下来,撞车就不会发生了。 1.2智能汽车大赛介绍 公司开发嵌入式解决方案的历史可追溯到50多年前,现在,已发展成为在20多个国家设有业务机构,拥有 20,000多名员工的实力强大的独立企业。 公司专门为汽车、消费电子、工业品、网络和无线应用提供“大脑”。他们无比丰富的电源管理解决方案、微处理器、微控制器、传感器、射频半导体、模块与混合信号电路及软件技术已嵌入在全球使用的各种产品中。并拥有雄厚的知识产权,其中包括6,200 多项专利。 为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托(教高司函[2005]201号文,附件1),由教育部高等自动化专业教学指导分委员会(以下简称自动化分教指委)主办全国大学生智能汽车竞赛。该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。 该竞赛由竞赛秘书处为各参赛队提供/购置规定围的标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽
物联网智能交通方案设计
物联网智能交通系
统建设方案 目录 一、物联网信息平台 (3) 1.1物联网信息平台简介 ..... . (3) 1.2物联网信息平台创新点 (3) 1.3产品优势及特点 (4) 1.4物联网信息平台设备清单 ....... .. (6) 二、智能交通系统 (6) 2.1 系统概述.. (6) 2.2系统技术方案 (8) 2.3智能小车系统... (8) 2.4道路交通管理系统.... . (9) 2.5路灯自动控制系统 ..... (11) 2.6ETC 系统 (11) 2.7智能停车系统 .... .. (12) 2.8城市照明系统 .... .. (13) 2.9支持的实验 ... (14) 2.10智能交通实训系统设备清单 ........ .. (15) 三、配置清单及规格参数 (16)
,、物联网信息平台 1.1物联网信息平台简介 物联网信息平台以光载无线交换机和上层应用程序为核心,构建 盖物联网实验室及其周边区域, 配合实验室现有的有线网络交换机、 有线网络、无线局域网络的物联网关键部分一一网络层。 物联网信息平台是物联网综合应用实训室整体解决方案的核心和基础, 在此基础上配合 解决方案中的其他物联网接入设备和控制设备可以实现物联网基础教学、物联网基础实验、 无线传感器网络教学、 RFID 技术的应用、传感器的学习及应用、智慧教室、物联网创新应 图(4 )物联网信息平台组网图 1.2物联网信息平台创新点 以物联网信息平台为核心构建的物联网综合应用实训室在实验教学、 理、科学研究等方面都有创新: WiFi 无线局域网,覆 网络路由器,建立融合 学生学习、教学管 3层架构清晰、完整地体现出 物与人的泛在链接, 使各 用等功能,学生可亲身真实体验和感受到物联网技术给未来生产和生活带来的改变。
智能交通设计总结
xxxxxx项目 设计总结报告设计单位:xxxxxx
一、项目概况 随着xx市经济社会加速发展,使得人口车辆不断增多,虽然城市道路建设不断增多,还是无法满足人们交通出行的需要,交通拥堵情况日趋严重,城市交通发展面临新的挑战。城市公共交通具有集约高效、节能环保等优点,优先发展公共交通是缓解交通拥堵、转变城市交通发展方式、提高人民群众生活品质、提高政府基本公共生活水平的必然要求。但是车辆拥堵导致公交车未能发挥其运载能力的优势,所以采用“公交优先”的交通管理方案是势在必行的。 本项目通过对明秀路、南梧路、昆仑大道(邕宾立交起嘉和城止)沿线公交优先控制系统的建设,实现公交车优先通行,并确保专用道早晚高峰期道路畅通,使得公交车便捷、高运载性等特点得到充分体现,提高公交车准点率,吸引普通居民多选择公交车出行,降低机动车出行量,从而缓解城市交通压力。 本项目建设范围为明秀路、南梧路、昆仑大道沿线路段,全长22公里,其中双向四车道路段总长4公里,双向六车道以上路段(含六车道)总长18公里。六车道以上路段(含六车道)每个方向均设置一条车道作为公交专用道。项目沿线总共有23个路口、路段,其中包括17个交叉路口及6个路段过街人行道。项目建成后可为51条公交线路共989班次公交车提供专用车道服务。项目设计预算总投资规模为1,072.2万元。 (南发改城市[2015]94依据南发改《关于xxxxxx项目建议书批复》
号),项目批复资金1,192万元,设计预算资金与原申报资金相比,核减了119.8万元。
◆项目设计《技术服务合同》 ◆项目建议书 ◆项目立项批复《关于xxxxxx项目建议书批复》项目初步设计◆项目初步设计批复《关于xxxxxx项目初步设计批复》 ◆项目施工图设计、项目预算表 ◆项目设计编制依据
智能小车的寻迹系统设计
上海大学2014~2015学年秋季学期研究生课程考试课程名称:模式识别技术及其应用课程编号:09Z117009 论文题目:基于CMOS摄像头的智能车路径识别方法 研究生姓名:徐威学号: 14721532 论文评语: 成绩:任课教师: 评阅日期:
基于CMOS摄像头的智能车路径识别方法 徐威 (上海大学机电工程与自动化学院,上海200072) 摘要:介绍了一种基于摄像头图像的智能车寻迹方法。以MC9S12XS128为核心控制器,利用CMOS图像传感器作为路径信息采集装置,通过对采集图像进行二值化处理、去噪操作、边缘检测和断点修补后提取出路径中心信息。 利用最小二乘法对路径中心信息进行直线拟合,根据拟合直线的参数计算舵机控制量。对舵机采用PD控制算法,根据舵机转向角设定小车的速度,并对小车实行转角和速度的实时控制。实验结果证明,该智能车系统能够沿着赛道快速稳定地自动行驶,实现了路径识别与跟踪。 关键字:智能小车;MC9S12XS128;图像;CMOS摄像头;寻迹;路径跟踪 Smart Car Path Identification Method Based on CMOS Camera XUWei (School of electrical and mechanical engineering and automation, Shanghai University, Shanghai 200072,China) Abstract: A method of smart car tracing based on camera image is introduced. MC9S12XS128 as a core controller, and CMOS camera as an acquisition device for route information. The route information is extracted by binarization, denoising, edge detection and breakpoint interpolation on the image collected. The system uses the minimum square fitting method to fit a straight line with the tracking information and calculate the value of direction control according to the parameters of the fitted line. The PD algorithm is adopted for the steering control. The velocity of intelligent vehicle is set on the basis of steering angle. The real-time control of angle and speed is implemented on the smart vehicle. Experiment results shows that the smart car system is able to automatically run fast and stably along the black track. And the path recognization and tracking is achieved. Key word: smart car; MC9S12XS128; image; COMS camera; tracing; route tracing 1. 智能小车的总体结构 智能车系统是以迅猛发展的汽车电子为背景,集中的运用到自动控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要的军用及民用价值。本文主要介绍智能小车识别路径的方法,该设计的系统主要由HCS12控制核心模块、电源模块、直流电机驱动模块、图像采集模块、舵机驱动模块、速度采集模块和调试接口模块组成,其结构框图如图1所示: