MEMS惯性传感器ADIS16355在姿态测量中的应用_黎永键
文章编号:1004-9037(2012)04-0501-07
MEMS 惯性传感器ADIS 16355在姿态测量中的应用
黎永键1 赵祚喜2 高俊文1
(1.广东农工商职业技术学院机电系,广州,510507;2.华南农业大学工程学院,广州,510642)
摘要:设计了基于微电子机械系统(M icro elect ro mechanical sy stem ,M EM S )惯性传感器集成模块ADI S 16355的姿态测量系统。该姿态测量系统采用ADI S16355作为惯性测量单元,利用加速度计对重力向量的观测来修正陀螺给出的姿态信息,卡尔曼滤波实现传感器信息融合以计算运动载体的姿态角。介绍了ADI S16355的基本功能模块,阐述了两种传感器融合测量实时姿态角的方法并给出了卡尔曼滤波算法迭代过程。基于ARM v 7架构的Cotex -M 3微处理器设计了姿态测量系统硬件。采用A HR S 500G A 对该姿态测量系统性能进行了测量姿态角的验证实验。测试结果表明,该姿态测量系统能在动态条件下准确地测定运动物体实时姿态角,其误差一般在±1°左右。
关键词:惯性传感器;数据融合;卡尔曼滤波;姿态测量中图分类号:T P 212.9 文献标识码:A
基金项目:国家高技术研究发展计划(“八六三”计划)(2006A A10A 304)资助项目;国家高技术研究发展计划(“八六三”计划)专题(2006A A10Z255)资助项目;精准农业智能关键装备技术引进与创新(2011-G32)资助项目。 收稿日期:2011-05-04;修订日期:2011-10-18
Application of MEMS Inertial Sensor ADIS 16355
in Attitude Measurement System
Li Yongjian 1,Zhao Zuoxi 2,Gao Junwen
1
(1.Depar tment of Electrica l ,Guangdong A IB Polytechnic Colleg e ,Gua ng zh ou ,510507,China ;2.Colleg e o f Engineering ,South China Ag ricultur al U niv er sity ,Guang zho u ,510642,China )
Abstract
:An efficient desig n fo r attitude measurement system is presented .The system has m ain features a s fo llow s :mo nitoring the attitude ang les by fusing o ne tri-axial accelerom eter and o ne tri-axial gy roscope integ rated in ADIS16355(M EM S iner tial senso r module ),collecting info rm atio n and calcula ting attitude a ngles by using ARM 7v 7processo r Co tex -M 3.The compensa tion of the w hole attitude m easurem ent system a re presented ,as w ell as the functio n of ADIS16355and their installa tion on the object.Then,o ne Kalman filter is desig ned as a senso r data fusion m ethod for measuring real-tim e attitude a ng les.Finally,based o n the com pariso ns betw een fused data and reference da ta from an AHRS 500G A instrum ent ,ex perimental resultssho w that the pro posed fusio n metho d giv es quite accurate attitude info rmation of the co ntro lled o bject a nd the av erag e error of attitude m easurement is ±1°.Key words :inertial senso r;da ta fusio n;Kalman filter;attitude measurement
引 言
在通信、雷达跟踪、汽车定位及机器人定位等的导航中,载体的运动控制都需要用到载体姿态信息,主要包括姿态角、航向角、加速度和角速度等[1]
。载体的姿态测量有多种方法,根据对象以及
执行任务要求的不同,姿态传感器可选用惯性式、
磁感应式等[2]
。微电子机械系统(Microelectro mechanica l system ,M EM S )惯性传感器是集微型传感器、执行器以及信号处理和控制电路、接口电路、通信和电源于一体的微型机电系统,属于惯性式传感器。基于M EM S 技术的传感器在体积、质量、功耗上都具有很大优势,从而成为微型系统姿
第27卷第4期2012年7月数据采集与处理J o urnal o f Data Acquisitio n &Processing V ol.27N o.4Jul.2012
态测量中的一种较好选择。但M EM S传感器存在精度低、漂移大等缺点,特别是M EM S陀螺由于其较大的漂移,只能在短时间内提供可靠的信息[3]。因此,单个M EM S传感器必须与其他姿态传感器组合使用才能给出长期稳定可靠的姿态和航向信息。
研究工作表明,传感器信息融合可以较好解决单个传感器测量误差偏大的问题,基于Ka lman滤波算法的姿态测量可以更有效地提供运动物体的姿态信息[4]。文献[5]设计了Kalm an滤波器对农业自动导航车辆的GPS定位数据进行平滑处理实现姿态修正,同时实现磁航向传感器偏移误差的在线辨识与航向校正,更真实地反映了被测对象运动状态。文献[6]研究了扩张型卡尔曼滤波(EKF)与神经网络智能控制相结合的融合滤波方法,对滤波器状态方程的预报值进行在线修正,获得的导航参数精度和动态性能均有提高。文献[7]基于M EM S器
件设计了微型六自由度的姿态航向参考系统,以Kalma n滤波算法作传感器信息融合,试验表明该系统可以提高导航系统的可靠性。
以上研究均采用卡尔曼滤波作为传感器信息融合的方法,姿态测量的精度有所提高,但是在测量系统的体积小型化、融合算法的优化方面的问题没有得到有效的解决。因此,本文设计了姿态测量系统以准确测量运动物体的姿态信息,重点是推导出适用于该系统的Kalman滤波算法,以进行传感器信息融合。该系统采用加速度计与陀螺仪集成模块ADIS16355作为传感器测量单元,利用加速度计对重力向量的观测来修正陀螺给出的姿态角信息,采用卡尔曼滤波算法对其状态进行估计。
1 姿态测量系统
1.1 ADIS16355简介
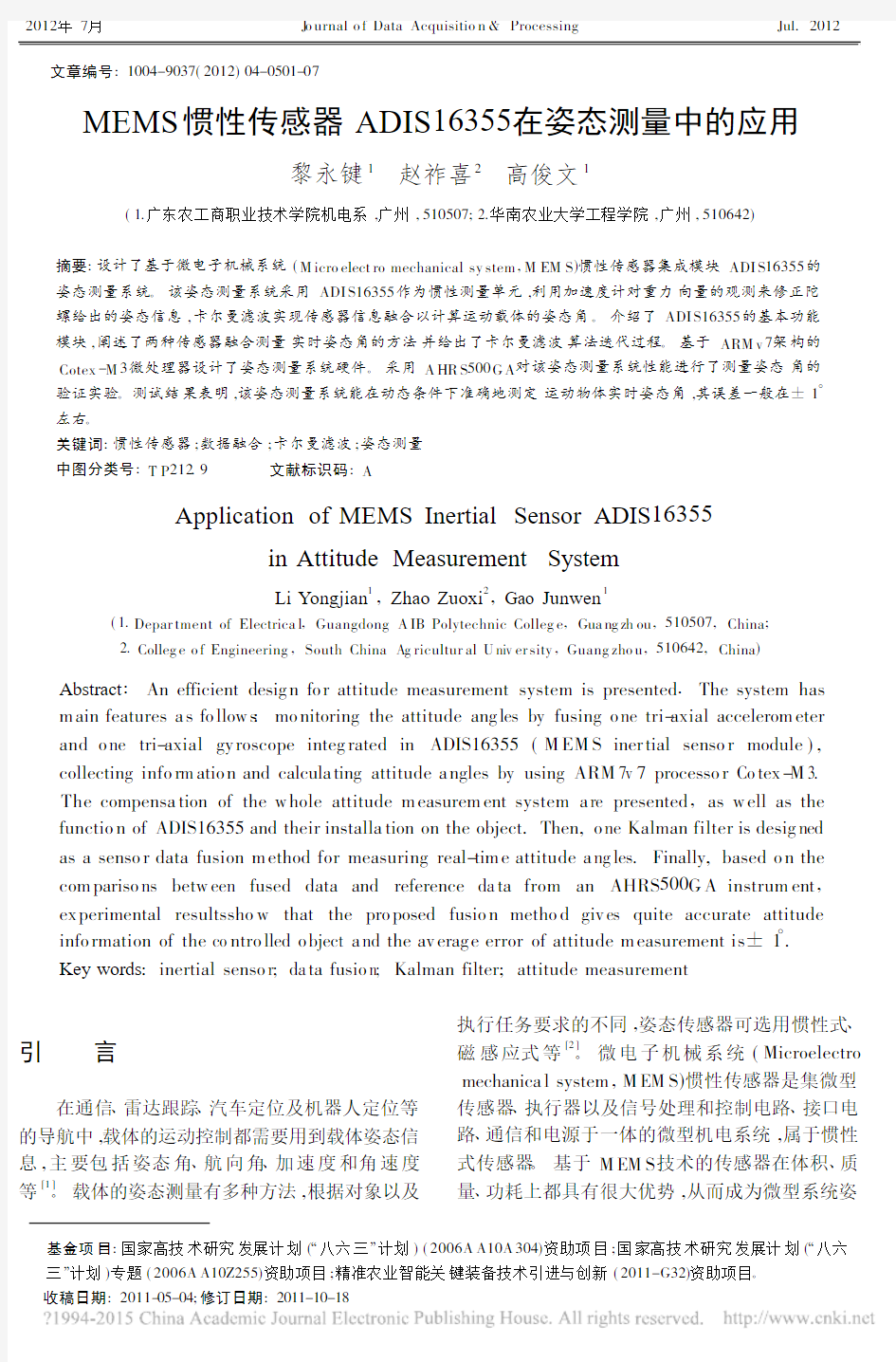
ADIS16355是一个完整的三轴陀螺和三轴加速度计组成的惯性感应系统,应用于运动控制与分析、机器人、惯性测量单元、导航控制等领域。该传感器包涵ADI公司微机械和混合信息处理技术,是一个高度集成的解决方案,提供校准后的数字惯性感应[8]。ADIS16355功能模块如图1(a)所示,传感器上电后便自动以819.2SPS采样速率进行惯性测量,温度传感器、M EM S三轴角速度传感器和三轴M EM S加速度传感器分别感知环境温度、器件所受三维角速度和加速度。
1.
2 姿态测量系统设计与硬件实现
图1(b)是姿态测量系统硬件结构示意图。该系统的器件包括ARMv7架构的Cotex-M3处理器,ADIS16355,SD卡存储器等。Cortex-M3处理器是一个低功耗的处理器,使用了ARMv7-M体系结构,是一个可综合的、高度可配置的处理器[9]。从性能上看,Cortex-M3处理器可以作为本文的融合算法硬件实现。Cor tex-M3的I/O口允许0~5V 电平,且ADIS16355的SPI接口输入高电平只需到2.0V,因此Co rtex-M3和ADIS16355虽是不同工作电源芯片,但它们的接口电平兼容,可采取直接连接的方式直接连接。RS-232电平转换采用M AX3232,它是一款3~ 5.5V单通道RS-232线路驱动器/接收器。电源电路可提供+5V和+12V电压,分别为ADIS16355和Co rtex-M3提供电源。Co tex-M3处理器使用SPI接收来自ADIS16355的数据,传感器的数据使用SD卡存储器进行保存。
图1 姿态测量系统的整体结构
2 融合算法推导
2.1 姿态航向算法
对于常见的坐标系,本文采用以下的表示方法:n为导航坐标系,b为机体坐标系,θ为横滚角,
502数据采集与处理第27卷
O
为俯仰角,j 为航向角。方向余弦矩阵体现了机体坐标系与导航坐标系之间的关联关系,假设C n b 为载体坐标系b 转换到导航坐标系n 时相应的方向余弦矩阵,则有如下关系
[10]
C n
b =
cos θco s j -cos O sin j +sin O sin θcos j sin O sin j +co s O sin θcos
j co s θsin j cos O cos j +si n O sin θsin j
-sin O cos j +cos O sin θsin j
-sin θ
sin O co s θ
co s O co s θ
四元数为四自由度的空间变量,记为Q =q 0+i q 1+j q 2+k q 3。四元数与方向余弦矩阵有以下关系
[11]
C n b =
q 20+q 21-q 22-q 2
3
2(q 1q 2-q 0q 3)
2(q 1q 3+q 0q 2
)2(q 1q 2+q 0q 3)q 20-q 21+
q 22-q 23
2(q 3q 2-q 0q 1)
2(q 1q 3-q 0q 2)
2(q 3q 2+q 0q 1)
q 20-q 21-q 22+
q 23
由此可得出四元数与运动物体姿态角有如下关系
O =a ta n2(2(q 2q 3-q 0q 1),1-2(q 21
+q 22
))(1)θ
=a sin (-2(q 1q 3-q 0q 2))(2)j
=a tan 2(2(q 1q 2-q 0q 3),1-2(q 2
2
+q 23
))(3)
2.2 MEMS 传感器测量倾角原理
当被测物体处于静态的情况下,加速度值为零,记为a b ib
=0,根据加速度计的原理,有
f
b
=a b
ib
-g b
=-g b
=-[g b
(1);g b
(2);g b
(3)]
(4)
式中:f b
为比力;g b
为重力加速度在载体坐标系下的三轴分量,如图2所示。
图2 重力加速度在载体坐标系分量
当物体运动时,依据机体系到导航系的转换关系式
f n
=C n
b
f
b
(5)
静止状态下,根据基本的比力方程可以计算得
到f n =
0g
e
,g e 为重力加速度常量值,于是
由式(4,5)可以得出
g b =
-sin θ
sin O co s θcos O cos θ
×g e (6)
求单轴加速度计测量值的反三角函数值,可分别计算横滚角θ和俯仰角O
O =a tan(g b
(2)/g b
(3))
(7)θ=a tan(-g b (1)/g b (2)2+g b (3)2)
(8)
从式(7,8)可知,静态条件下测量物体在三轴上的加速度即可求出物体的横滚角和俯仰角。当被测物体抖动比较大的情况下,a b ib 不能忽略,则以上的式子不能准确计算出姿态角,为此引入ADIS 16355内置的陀螺仪。通过陀螺仪测量运动物体角速率求解矩阵方程常用的方法是四元数法。陀螺仪可以测量倾角变化率,采用三轴陀螺仪测量各轴上的角速率对时间的积分也可求出旋转角,但由于测量精度及各种漂移的影响,使用简单积分或累加法会导致无法消除的积累误差。
2.3 传感器信息融合方案
姿态航向参考系统(Attitude and heading reference sy stem ,AHRS )能精确测量载体姿态角,其内部集成了三轴陀螺仪、三轴加速度计和三轴磁场计,主要应用于航空、惯性导航等领域[13]。文献[14]对AHRS 工作原理进行了研究,其功能实现属于多传感器信息融合。选用重力向量和地磁向量作为参考向量,为陀螺提供角度修正和零偏估计,实现动态环境下载体姿态估计。考虑到AHRS 生产成本较高,研究人员一般根据实际需要简化传感器组合,提出相应的传感器信息融合方法准确计算姿态角。文献[15]提出了姿态误差修正算法,设计了基于四元数的内阻尼卡尔曼滤波器,更新姿态四元数修正误差
[15]
。本文主要考虑横滚角与俯仰角
的准确测量,因此结合AHRS 工作原理,提出采用M EM S 三轴加速度计和三轴陀螺仪组合,传感器的组合方案如图3所示。该融合方案的主要思想
为:利用陀螺测得的角速度来更新前一步的姿态角;利用加速度计对重力向量的观测来修正陀螺给出的姿态角信息,采用卡尔曼滤波算法对其状态进行估计,通过数据融合修正其姿态角。
本文使用的算法为:首先设定一个关于加速度与角速度的阈值,利用加速度计和陀螺仪的输出判断物体运动状态。要求被测物体一开始处于静止状态,从而通过式(7,8)可以比较准确测量出初始的
503
第4期
黎永键,等:M EM S 惯性传感器ADI S 16355在姿态测量中的应用
图3 融合计算姿态角的传感器组合方案
角度。然后根据阈值判断被测物体是否处于静态,若是则继续使用加速度计计算姿态角;否则将该时刻作为传感器使用切换的时刻,利用陀螺测得的角速度来更新前一步的姿态角;利用加速度计对重力向量的观测来修正陀螺给出的姿态角信息,采用卡尔曼滤波算法对其状态进行估计,通过数据融合修正其姿态角。
2.4 信息融合算法推导
本文提出以下滤波修正方法:当被测物体振动较大时,不按照式子(7,8)的坐标系转换关系计算姿态角,避免进一步引入计算误差;选取姿态四元数和陀螺漂移为状态变量,以姿态误差传播方程为状态方程,以机体系的比力差值为观测量,估计姿态误差,达到修正目的。依据上述解决思想选取状态变量如下:X =
q 0
q 1
q 2
q 3X x X y
X z
其中,q i (i =1~4)为四元数,X j (j =x ,y ,j )为陀螺漂移。本文设计Kalma n 滤波步骤如下:
(1)定义等时间间隔T 内机体系的角速率
Δk x Δk y Δk z
=k b
x -X x
k b y -X y k b
z -X z
(9)
通过解矩阵方程,可推算出四元数有如下的更
新关系式
Q (t k
)=
cos(‖k ‖)I +sin(‖w ‖)
‖w ‖W ×
Q (t k -1)
(10)
式中:k 为三轴角速度;W 为三轴角速度在采样时间内积分值;t k -1表示第k -1时刻,则t k 表示下一时刻。因此,只要建立起k 时刻与k -1时刻的Q 值函数关系,测量出k -1时刻的k 即得到下一时刻的Q 值,实现四元数进行即时修正。由式子(10)可
以得到状态矩阵
H =I 7×7+
T 2
-Δk x -Δk y
-Δk z
q 1q 2q 3Δk
x 0Δk
z -Δk
y -q 0q 3-q 2Δk y
-Δk z 0Δk x -q 3-q 0q 1Δk z Δk y -Δk x 0q 2-q 1-q 0000000000000000
(2)由式子(6),将其展开为四元数的形式有
f n
=
2g e (q 1q 3-q 0q 2)
2g e
(q 2q 3+q 0q 1)
g e (q 20-q 21-q 2
2+q 23)
(11)
(3)将式(11)改写为观测方程的形式,可得观
测矩阵如下
H =2g -q 2q 3-q 0q 0
q 1000q 1q 0q 3-q 2000q 0
-q 1
-q 2
q 3
00
(4)计算卡尔曼滤波增益
K K =[P K -1 H T
(H P K -1 H T
+R 0)-1
]7×3
(5)状态变量更新
X K =X K -1+K K (F b -f )
式中,F b =[f b
x
f b
y
f b z ]T
。
(6)计算均方误差方阵
P K =(I -K K H ) P K -1
按照步骤(1~6)进行Kalma n 滤波计算,即可以实时地修正四元数,然后可根据式(1~3)计算修正后的姿态角,实现误差修正的目的。
3 试验结果与分析
3.1 实验设备
用高精度姿态航向参考系统AHRS 500G A 的测量结果作为对照,验证本文设计姿态测量系统效果。AHRS500GA 由美国Cro ssbow 公司生产,可测量运动载体的姿态角(航向、俯仰与横滚角),数字输出,高速(采样频率可达100Hz)高精度(航向0.2°RM S,俯仰与横滚0.03°RM S)。AHRS500GA 采用数据包的形式通过串行口发送姿态角、角速度、加速度、磁强的数据,每个数据包有26个字节,十六进制数表示,每帧数据的内容从第三字节开始,包括横滚角、俯仰角、偏航角以及角速率、加速度、磁场的信息
[16]
。
如图4(a )所示,姿态测量系统的微处理器Co rtex -M 3有3个RS 232接口,本实验使用其中的
504
数据采集与处理
第27卷
图4 姿态测量系统实验测试系统
2个,1个连接AHRS500G A采集参考数据,1个连接PC将采集的数据以及各种控制算法用的中间数据实时输出,由PC将这些数据保存及进行分析。由Co rtex-M3统一采集各种数据,这样AHRS500GA 数据与姿态测量系统数据可以很方便地在时间轴上同步。由计算机记录的实时数据包括
A HRS500GA数据、ADIS16355数据等。
3.2 实验方法
为了验证本文提出的姿态测量系统,本文进行姿态角融合计算实验。实验以一根刚性杆件作为姿态测量对象,实验步骤如下:(1)在被测刚性杆件上安装姿态测量系统以及ARHS500GA,如图4(b)所示。其中,x轴顺着杆件的长度方向,y轴垂直于杆件的平面,z轴与杆件旋转方向一致。实验中A HRS的y轴正方向与ADIS16355的x轴一致,保证AHRS500GA测得杆件的姿态角正负方向与姿态测量系统一致。(2)启动姿态测量系统,令被测刚性杆件处于运动状态,ADIS16355与A HRS500GA同步工作,SD卡记录相关数据;(3) PC平台上用Matlab融合程序进行处理,解算出杆件姿态信息,并计算出融合的角度,然后与A
HRS500GA的测量姿态角进行比较分析。3.3 实验结果分析
实验数据用计算机在Matlab环境下处理,试验数据处理程序的主要流程如图5所示。
图5 数据处理流程图
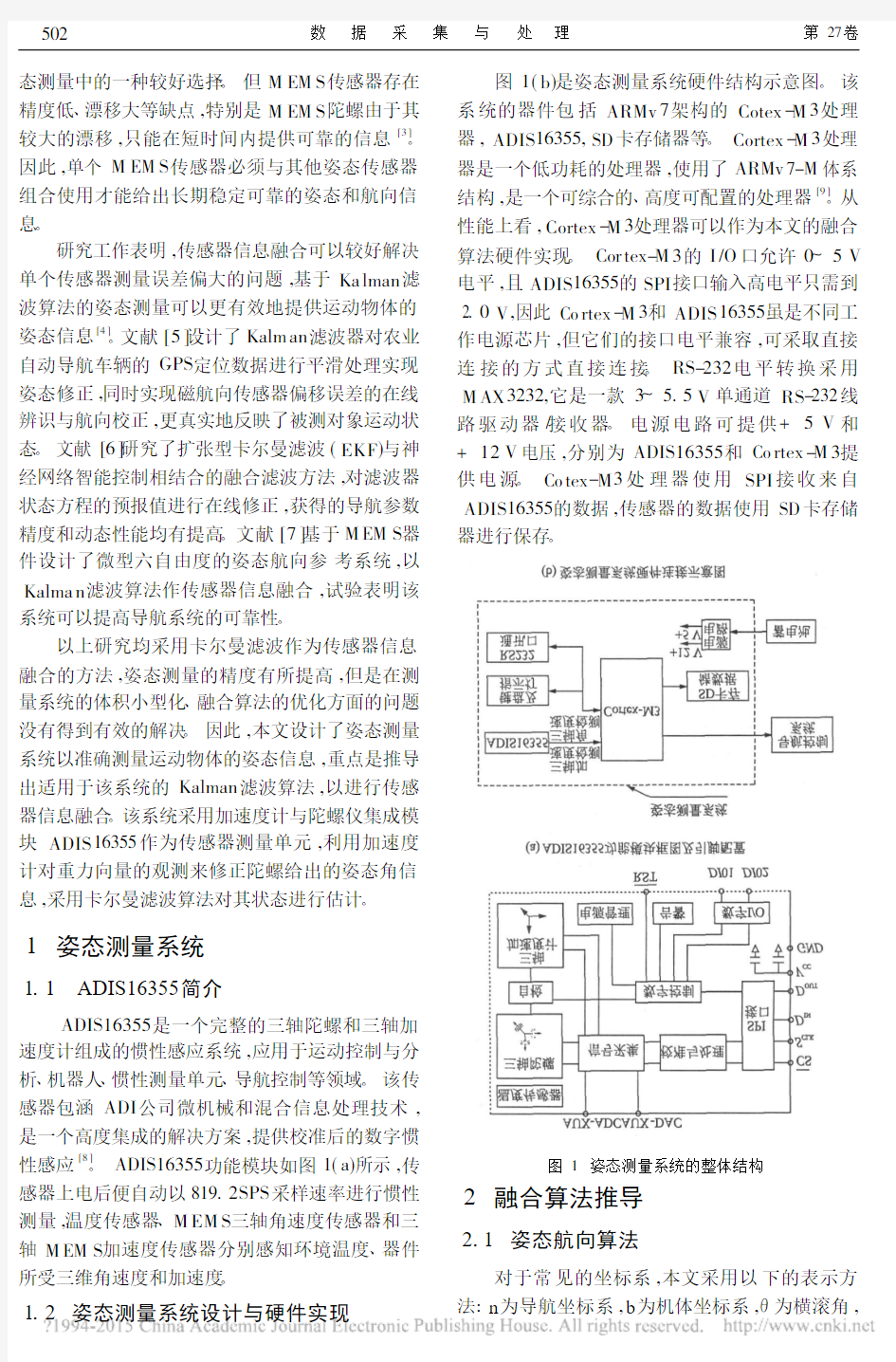
图6为一次典型的实验结果记录,采样周期为0.01s,图6(b)为图6(a)的局部放大结果,图6(d)为图6(c)的局部放大结果。图中倾角记录曲线绘出了三轴加速度计解算得到得姿态角以及由AHRS500GA测得的参考姿态角,从中可看出:
(1)仅使用加速度计不能可靠地在动态环境下测定运动物体的姿态角。从图6(b,d)中可见,0~400s区间无振动或振动微弱时,加速度计能正确测量倾角,其后振动加大,虽然总体趋势与参考倾角一致,但有较高频率干扰叠加,表现为出现快速上下跳变,图中误差可达±5°以上。
(2)本设计姿态测量系统能准确测量运动物体的姿态信息。由图6可见,在静态环境和动态环境下,融合结果均与参考倾角结果呈现良好的一致性,系统解算精度横滚角及俯仰角误差绝对值不超过±1°。
(3)横滚角以及俯仰角的输出比较可以看出,融合算法计算出来的姿态角接近AHRS500G A的测量角度。单纯使用四元数解算,由于陀螺漂移的存在,算法误差会随时间增长而累积,而通过实时判断载体运动状态,利用加速度计对陀螺漂移进行重调补偿,姿态角的误差漂移减小了一个数量级。因此,基于卡尔曼滤波的姿态修正算法是有效的。
505
第4期 黎永键,等:M EM S惯性传感器ADI S16355在姿态测量中的应用
图6 ADI S16355测量运动杆件倾角实验结果
4 结束语
本文设计了姿态测量系统,提出了利用加速度计对重力向量的观测来修正陀螺给出的姿态角信息的方法,并基于Matlab平台进行了相关实验,证明该惯性测量系统具有高准确度与测量系统小型化的特点,其倾角测量精度满足惯性导航对于姿态角测量的要求。
参考文献:
[1] 高宗余,李德胜.多M EM S传感器姿态测量系统的研
究[J].电光与控制,2010,17(3):68-70.
Gao Zo ng yu,Li Desheng.Attitude measurement
sy stem based o n multiple M EM S senso rs[J].
Electro nics Optics&Co ntro l,2010,17(3):68-70. [2] 朱荣,周兆英.基于M EM S的姿态测量系统[J].测控
技术,2002,21(10):6-13.
Zhu Ro ng,Zh ou Zhao ying.A M EM S-based at titude
refer ence system[J].M easurement&Co ntro l
T ech no lo gy,2002,21(10):6-13.[3] Nadim M,Kir t W.An intr oduction to micro elec tro
mecha nical systems engineering[M].Seco nd Editio n Lo ndo n,United Kingdo m:Ar tech Ho use,Inc.,
2004:1-9,79-133.
[4] 赵祚喜,罗锡文,李庆,等.基于M EM S惯性传感器
融合的水田激光平地机水平控制系统[J].农业工程学报,2008,24(6):119-124.
Zhao Zuo xi,Luo Xiwen,Li Qing,et al.Lev eling
co ntro l sy stem of laser-contr olled la nd lev eler fo r
paddy field based o n M EM S iner tial sensor fusio n
[J].T ransactio ns o f the CSA E,2008,24(6):119-124.
[5] 张智刚,罗锡文,赵祚喜,等.基于Ka lma n滤波与纯追
踪模型的农业机械导航控制[J].农业机械学报,
2009,40(9):6-12.
Zhang Zhig ang,Luo Xiw en,Zha o Zuox i,e t a l.
Tr ajecto ry tracking co ntro l me tho d based o n Kalman filter a nd pure pur suit model fo r ag ricultura l v ehicle
[J].T ransa ctio ns of the Chinese Society fo r
Ag ricultur al Ma chine ry,2009,40(9):6-12.
[6] 夏琳琳.低成本A HRS/G PS紧耦合融合滤波技术研
究[D].哈尔滨:哈尔滨工程大学自动化学院,2008:
506数据采集与处理第27卷
40-45.
Xia Linlin.A study o n fusion filter a lg o rithm fo r lo w
co st tig htly-co upled A HR S/G PS[D].Ha rbin:
Co lleg e o f Elec trical Engineering and Auto mation,
Ha rbin Eng ineering U niv er sity,2008:40-45.
[7] 张谦,裴海龙,罗沛.基于M EM S器件的姿态航向参
考系统设计及应用[J].计算机工程与设计,2007,28
(3):631-634.
Zha ng Qian,Pei Hailo ng,Luo Pei.Desig n and implementation of A HRS based-on M EM S units[J].
Co mpute r Engineering and Desig n,2007,28(3):631-634.
[8] Analog Devices,Inc.ADI S16300datasheet[EB/
O L].h ttp://w ww.a nalog.co m/sta tic/im po rted-files/data-sh ee ts/ADI S16300.pdf,2009-04/2010-01-
28.
[9] A RM Limited.Co rtex TM-M3technical refer ence
ma nual[EB/O L].ht tp://ww w w.a rm.co m,2006-01-05/2008-02-10.
[10]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出
版社,2007:13-232.
Chen Yo ng bing,Zho ng B in.Principles o f inertia l
naviga tio n[M].Beijing:Na tio nal Defence of
Industria l Press,2007:13-232.
[11]孙冬梅,田曾山,韩宁军.捷联惯系统中四元素法求
解姿态角仿真模拟[J].弹箭与制导学报,2009,29
(1):51-60.
Sun Dong mei,Tian Ze ng sha n,Han Ning jun.
Simulation on quater nio n calcula te attitude angle of
the strapdow n ine rtia l nav ig ation sy stem[J].J o urnal
of Pro jectiles,Rockets,M issiles and Guidance,2009,
29(1):51-60.
[12]陈哲.捷联惯导系统原理[M].北京:中国宇航出版
社,1986:35-80.
Ch en Zhe.Princeples o f th e str apdo wn iner tial
nav ig atio n sy stem[M].Beijing:China Astro na utic
Publishing House,1986:35-80.
[13]Titter to n D H,Westo n J L.Str apdo wn iner tial
nav ig atio n techno lo g y[M].Londo n,U nited
King dom:Pete r Pereg rinus Ltd o n Behalf of the
Institute o f Electrical Engineers,2004:280-360. [14]Far rell J A.Aided nav iga tion:G PS with high ra te
senso rs[M].New Y or k:M c Graw H ill,2006:35-60.
[15]屈重君,雷宝权,陈璞,等.无位置输入的民机姿态航
向误差修正算法[J].传感技术学报,2008,21(11):
1862-1866.
Q u Zho ngjun,L ei Bao quan,Chen Pu,et al.Erro r
co r rectio n alg o rithm of a ttitude and heading fo r civil
air plane without po sitio n inputs[J].Chinese J o urnal
of Sensor s a nd Actua tor s,2008,21(11):1862-1866.
[16]Cro ssbow Technolog y Inc.A HRS500G A-series
user′s ma nual[M].Rev ision B.U SA:[s.n.],2007.
作者简介:黎永键(1983-),男,助教,研究方向:自动导航控制技术,E-mail:leeey ong@163.co m;赵祚喜(1968-),男,教授,博士,研究方向:农业机械及装备自动控制系统;高俊文(1966-),男,副教授,博士,研究方向:计算机应用技术。
507
第4期 黎永键,等:M EM S惯性传感器ADI S16355在姿态测量中的应用
基于MEMS加速度传感器的双轴倾角计及其应用
基于MEMS加速度传感器的双轴倾角计及其应用 引言 MAV由于体积和负载能力极为有限,因此,减小和减轻飞控导航系统的体积及重量,就显得尤为重要。本文基于MEMS加速度传感器,设计一种双轴倾角计,该装置精度高、重量轻,可满足MAV的姿态角测量要求,也可用于其他需要体积小、重量轻的倾角测量设备上。 MEMS加速度传感器 ADXL202 是最新的、低重力加速度双轴表面微机械加工的加速度计,以模拟量和脉宽调制数字量2种方式输出,并具有极低的功耗和噪音。表面微机械加工使加速度传感器、信号处理电路高度集成于一个硅片上。和所有加速度计一样,传感器单元是差动电容器,其输出与加速度成比例。加速度计的性能依赖于传感器的结构设计。差动电容是由悬臂梁构成,而悬臂梁是由很多相间分布的指状电容电极副构成,一副指状电容电极可简化为图1所示的结构。每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。 悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m 的物体,因受力F而产生加速度a,则F =m a。而弹簧的形变与所受力的大小成比例,即F = kx,所以 x = (m / k)a , 式中x为位移, m; m 为质量, kg; a为加速度, m / s2 ; k为弹簧刚度系数, N /m。 因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以, 减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂梁更坚固。所以,如果保持尽可能高的弹簧系数, 只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和Y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高了ADXL202的分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X 轴和Y轴的灵敏度耦合减小到最小。 倾角测量原理 ADXL202 用于倾角测量是最典型的应用之一,它以重力作为输入矢量来决定物体在空间的方向。当重力与其敏感轴垂直时,它对倾斜最敏感,在该方位上其对倾角的灵敏度最高。当敏感轴与重力平行时,每倾斜1 °所引起输出加速度的变化被忽略。当加速度计敏感轴与重力垂直时,每倾斜1 °所引起输出加速度的变化约为17. 5mgn ,但在45°时,每倾斜1 °所引起输出加速度的变化仅为12. 5mgn ,而且,分辨力降低。表1为X, Y轴在铅垂面内倾斜±90 °时,X, Y 轴的输出。 当该加速度计的X, Y轴都与重力方向垂直时,可作为具有滚转角和俯仰角的双轴倾角传感器。一旦加速度计的输出信号被转化为一个加速度, 该加速度将位于- 1 gn 和+ 1 gn 之间。则倾斜角以度表示可按下式计算 θ= arcsin (AX / gn ) γ= arcsin (AY / gn ),
MEMS压力传感器
MEMS压力传感器 姓名:唐军杰 学号:09511027 班级: _09511__
目录 引言 (1) 一、压力传感器的发展历程 (2) 二、MEMS微压力传感器原理 (3) 1.硅压阻式压力传感器 (3) 2.硅电容式压力传感器 (4) 三、MEMS微压力传感器的种类与应用范围 (5) 四、MEMS微压力传感器的发展前景 (7) 参考文献 (8)
内容提要 在整个传感器家族中,压力传感器是应用最广泛的产品之一, 每年世界性的压力传感器的专利就有上百项。微压力传感器作为微 型传感器中的一种,在近几年得到了快速广泛的应用。本文详细介 绍了MEMS压力传感器的原理与应用。 [关键词]:MEMS压力传感器微型传感器微电子机械系统 引言 MEMS(Micro Electromechanical System,即微电子机械系统) 是指集微型传感器、执行器以及信号处理和控制电路、接口电路、 通信和电源于一体的微型机电系统。它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。MEMS技术的发展开辟了一个全新的技术领域和产业,采用MEMS技术制作的微传感器在航空、航天、汽车、生物医学、环境 监控、军事以及几乎人们所接触到的所有领域中都有着十分广阔的 应用前景。 MEMS微压力传感器可以用类似集成电路的设计技术和制造工艺,进行高精度、低成本的大批量生产,从而为消费电子和工业过 程控制产品用低廉的成本大量使用MEMS传感器打开方便之门,使 压力控制变得简单、易用和智能化。传统的机械量压力传感器是基 于金属弹性体受力变形,由机械量弹性变形到电量转换输出,因此 它不可能如MEMS微压力传感器那样,像集成电路那么微小,而且 成本也远远高于MEMS微压力传感器。相对于传统的机械量传感器,MEMS微压力传感器的尺寸更小,最大的不超过一个厘米,相对于 传统“机械”制造技术,其性价比大幅度提高。
MEMS传感器现状及应用_王淑华
MEMS传感器现状及应用 王淑华 (中国电子科技集团公司第十三研究所,石家庄 050051) 摘要:M EM S传感器种类繁多,发展迅猛,应用广泛。首先,简单介绍了M EMS传感器的分类和典型应用。其次,对M EMS压力传感器、加速度计和陀螺仪三种最典型的M EM S传感器进行了详细阐述,包括类别、技术现状和性能指标、最新研究进展、产品,及应用情况。介绍MEM S压力传感器时,给出了国内外采用新型材料制作用于极端环境下压力传感器的研究情况。最后,从新材料、加工和组装技术方面对MEM S传感器的发展趋势进行了展望。 关键词:微电子机械系统(M EMS);传感器;加速度计;陀螺仪;压力传感器 中图分类号:TH703 文献标识码:A 文章编号:1671-4776(2011)08-0516-07 Current Status and Applications of MEMS Sensors Wang Shuhua (The13th Research I nstitute,CET C,S hi jiazhuang050051,China) A bstract:MEMS senso rs feature g reat varieties,rapid development and w ide applications.Firstly, the catego ries and ty pical applicatio ns of M EMS senso rs are introduced briefly.Then three typi-cal M EMS sensors,i.e.the pressure sensor,acceleromete r and gy ro sco pe are illustrated in de-tail,including the subdivision,current technical capability and perfo rmance index,latest research pro gress,products and their applications.Besides that,the research status of the M EM S pres-sure senso r using new m aterials for the extreme enviro nment at ho me and abro ad is presented. Finally,developm ent trends of M EMS sensors are predicted in te rm s o f new materials,pro ces-sing and assembling technolog y. Key words:microelectromechanical sy stem(M EMS);sensor;accelerome ter;gy roscope;pres-sure senso r D OI:10.3969/j.issn.1671-4776.2011.08.008 EEACC:2575 0 引 言 MEM S传感器是采用微机械加工技术制造的新型传感器,是M EMS器件的一个重要分支。1962年,第一个硅微型压力传感器的问世开创了MEM S技术的先河,M EMS技术的进步和发展促进了传感器性能的提升。作为M EMS最重要的组成部分,M EMS传感器发展最快,一直受到各发达国家的广泛重视。美、日、英、俄等世界大国将M EMS传感器技术作为战略性的研究领域之一,纷纷制定发展计划并投入巨资进行专项研究。 随着微电子技术、集成电路技术和加工工艺的发展,MEM S传感器凭借体积小、重量轻、功耗低、可靠性高、灵敏度高、易于集成以及耐恶劣工 收稿日期:2011-04-06 E-mail:1117sh uhua@https://www.360docs.net/doc/0c18521693.html,
MEMS压力传感器及其应用_颜重光_图文.
MEMS(微机电系统是指集微型 传感器、执行器以及信号处理和控制电路、接口电路、通信和电源于一体的微型机电系统。 M E M S 压力传感器可以用类似集成电路(IC设计技术和制造工艺,进行高精度、低成本的大批量生产,从而为消费电子和工业过程控制产品用低廉的成本大量使用MEMS传感器打开方便之门,使压力控制变得简单易用和智能化。传统的机械量压力传感器是基于金属弹性体受力变形,由机械量弹性变形到电量转换输出,因此它不可能如MEMS压力传感器那样 做得像IC那么微小,成本也远远高于MEMS压力传感器。相对于传统的机械量传感器,MEMS压力传感器的尺寸更小,最大的不超过1cm,使性价比相对于传统“机械”制造技术大幅度提高。 MEMS压力传感器原理 目前的MEMS压力传感器有硅压阻式压力传感器和硅电容式压力传感器,两者都是在硅片上生成的微机电传感器。 硅压阻式压力传感器是采用高精密 半导体电阻应变片组 成惠斯顿电桥作为力电变换测量电路的,具有较高的测量精度、较低的功耗,极低的成本。惠斯顿电桥的压阻式传感器,如无压力变化,其输出为零,几乎不耗电。其电原理如图1所示。硅压阻式压力传感器其应变片电桥的光刻版本如图2。 M E M S 硅压阻式压力传感器采用周边固定的圆形的应力杯硅薄膜内壁,采用M E M S 技术直接将四个高精密半导体应变片刻制在其表面应力 最大处,组成惠斯顿测量电桥,作为力电变换测量电路,将压力这个物理量直接变换成电量,其测量精度能达0.01%~0.03%FS。硅压阻式压力传感器结构如图3
所示,上下二层是玻璃体,中间是硅片,硅片中部做成一应力杯,其应力硅薄膜上部有一真空腔,使之成为一个典型的绝压压力传感器。应力硅薄膜与真空腔接触这一面经光刻生成如图2的电阻应变片电 MEMS压力传感器及其应用 MEMS Pressure Sensor Principle and Application 颜重光华润矽威科技(上海有限公司(上海201103 本文于2009年3月22日收到。颜重光:高工,上海市传感技术学会理事,从事IC应用方案的设计策划和客户应用技术支持。 摘要:简述M E M S 压力传感器的结构与工作原理,并探讨了其应用、压力传感器Die的设计及生产成本分析,覆盖了从系统应用到销售链。 关键词:M E M S 压力传感器;惠斯顿电桥;硅薄膜应力杯;硅压阻式压力传感器;硅电容式压力传感器 D O I : 10. 3969/j. i s s n. 1005-5517.2009.06.015 图1 惠斯顿电桥电原理 图2 应变片电桥的光刻版本 图3 硅压阻式压力传感器结构 图4 硅压阻式压力传感器实物责任编辑:王莹 技术长廊|智能传感器 58 https://www.360docs.net/doc/0c18521693.html,
MEMS传感器现状及应用
毕业设计指导
山西大学本科论文MEMS传感器现状及应用 MEMS传感器现状及应用 摘要: MEMS传感器种类繁多,发展迅猛,应用广泛。首先,简单介绍了MEMS传感器的分类和典型应用。其次,对MEMS压力传感器、加速度计和陀螺仪三种最典型的MEMS传感器进行了详细阐述,包括类别、技术现状和性能指标、最新研究进展、产品,及应用情况。介绍MEMS压力传感器时,给出了国内外采用新型材料制作用于极端环境下压力传感器的研究情况。最后,从新材料、加工和组装技术方面对MEMS传感器的发展趋势进行了展望。 关键词: 微电子机械系统(MEMS);传感器;加速度计;陀螺仪;压力传感器 Current Status and Applications of MEMS Sensors Abstract: MEMS sensors feature great varieties, rapid development and wide applications. Firstly,the categories and typical applications of MEMS sensors are introduced briefly. Then three typi-cal MEMS sensors, i. e. the pressure sensor, accelerometer and gyroscope are illustrated in de-tail,including the subdivision, current technical capability and performance index, latest researchprogress, products and their applications. Besides that, the research status of the MEMS pres-sure sensor using new materials for the extreme environment at home and abroad is presented.Finally, development trends of MEMS sensors are predicted in terms of new materials, proces-sing and assembling technology. Key words: microelectromechanical system(MEMS); sensor; accelerometer; gyroscope; pres-sure sensor
MEMS压力传感器及其应用
MEMS压力传感器及其应用 MEMS压力传感器可以用类似集成电路(IC)设计技术和制造工艺,进行高精度、低成本的大批量生产,从而为消费电子和工业过程控制产品用低廉的成本大量使用MEMS传感器打开方便之门,使压力控制变得简单易用和智能化。传统的机械量压力传感器是基于金属弹性体受力变形,由机械量弹性变形到电量转换输出,因此它不可能如MEMS压力传感器那样做得像IC那么微小,成本也远远高于MEMS压力传感器。相对于传统的机械量传感器,MEMS压力传感器的尺寸更小,最大的不超过1cm,使性价比相对于传统“机械”制造技术大幅度提高。 一、压力传感器的发展历程 现代压力传感器以半导体传感器的发明为标志,而半导体传感器的发展可以分为四个阶段: (1)发明阶段(1945 - 1960 年):这个阶段主要是以1947 年双极性晶体管的发明为标志。此后,半导体材料的这一特性得到较广泛应用。史密斯(C.S. Smith)与1945 发现了硅与锗的压阻效应,即当有外力作用于半导体材料时,其电阻将明显发生变化。依据此原理制成的压力传感器是把应变电阻片粘在金属薄膜上,即将力信号转化为电信号进行测量。此阶段最小尺寸大约为1cm。 (2)技术发展阶段(1960 - 1970 年):随着硅扩散技术的发展,技术人员在硅的(001)或(110)晶面选择合适的晶向直接把应变电阻扩散在晶面上,然后在背面加工成凹形,形成较薄的硅弹性膜片,称为硅杯。这种形式的硅杯传感器具有体积小、重量轻、灵敏度高、稳定性好、成本低、便于集成化的优点,实现了金属- 硅共晶体,为商业化发展提供了可能。 (3)商业化集成加工阶段(1970 - 1980 年):在硅杯扩散理论的基础上应用了硅的各向异性的腐蚀技术,扩散硅传感器其加工工艺以硅的各项异性腐蚀技术为主,
MEMS技术的最新发展和MEMS传感器
作业2:叙述MEMS技术的最新发展并介绍几种MEMS传感器 MEMS(Micro-Electro-Mechanical Systems)是微机电系统的缩写。MEMS是美国的叫法,在日本被称为微机械,在欧洲被称为微系统,MEMS就是在一个硅基板上集成了机械和电子元器件的微小机构。在代工厂中,通过对电子部分使用半导体工艺和对机械部分使用微机械工艺将其或者直接蚀刻到一片晶圆中,或者增加新的结构层来制作MEMS产品。作为纳米科技的一个分支,MEMS被称为电子产品设计中的“明星”。目前MEMS加工技术又被广泛应用于微流控芯片与合成生物学等领域,从而进行生物化学等实验室技术流程的芯片集成化。 MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。 MEMS技术的发展开辟了一个全新的技术领域和产业,采用MEMS技术制作的微传感器、微执行器、微型构件、微机械光学器件、真空微电子器件、电力电子器件等在航空、航天、汽车、生物医学、环境监控、军事以及几乎人们所接触到的所有领域中都有着十分广阔的应用前景。MEMS技术正发展成为一个巨大的产业,就象近20年来微电子产业和计算机产业给人类带来的巨大变化一样,MEMS也正在孕育一场深刻的技术变革并对人类社会产生新一轮的影响。目前MEMS市场的主导产品为压力传感器、加速度计、微陀螺仪、墨水喷咀和硬盘驱动头等。大多数工业观察家预测,未来5年MEMS器件的销售额将呈迅速增长之势,年平均增加率约为18%,因此对对机械电子工程、精密机械及仪器、半导体物理等学科的发展提供了极好的机遇和严峻的挑战。 MEMS第一轮商业化浪潮始于20世纪70年代末80年代初,当时用大型蚀刻硅片结构和背蚀刻膜片制作压力传感器。由于薄硅片振动膜在压力下变形,会影响其表面的压敏电阻走线,这种变化可以把压力转换成电信号。后来的电路则包括电容感应移动质量加速计,用于触发汽车安全气囊和定位陀螺仪。 第二轮商业化出现于20世纪90年代,主要围绕着PC和信息技术的兴起。TI公司根据静电驱动斜微镜阵列推出了投影仪,而热式喷墨打印头现在仍然大行其道。 第三轮商业化可以说出现于世纪之交,微光学器件通过全光开关及相关器件而成为光纤通讯的补充。尽管该市场现在萧条,但微光学器件从长期看来将是MEMS一个增长强劲的领域。 目前MEMS产业呈现的新趋势是产品应用的扩展,其开始向工业、医疗、测试仪器等新领域扩张。推动第四轮商业化的其它应用包括一些面向射频无源元件、在硅片上制作的音频、生物和神经元探针,以及所谓的'片上实验室'生化药品开发系统和微型药品输送系统的静态和移动器件。 MEMS传感器已经存在几十年了,并成功的渗透到一些大规模应用的市场,如医疗压力传感器和安全汽囊加速度计等。尽管取得了这些成功,但MEMS传感器很大程度上还是局限于这些零散的应用。受到汽车电子和消费类电子市场的驱动,这种状况在下一个十年中有望得到改变。 MEMS传感器正在当今的两大热门产品中起到不可或缺的作用。使用测量物理运动从而提供运动感知能力的MEMS加速度计,任天堂公司的Wii无线游戏机允许使用者通过运动和点击互相沟通和在屏幕上处理一些需求,其原理是将运动(例如挥舞胳膊模仿网球球拍的运动)转化为屏幕上的游戏行为。在2006年5
MEMS传感器在汽车安全系统中的应用
为了监测车辆翻滚的这种状态,把陀螺仪输出的传感器信号与低g值加速度传感器的输出信号结合起来是至关重要的。通过处理两个传感器给出的信号,系统的算法确定车的Z轴以及垂直线之间的夹角,以及每一时刻车辆的角速度ωx。因此,车辆翻滚感测算法及时确定准确的时间点和位置,从而爆开特定的气囊或主动收紧绑在乘员身上的安全带,起到保护作用。 此外,电子稳定程序系统也是MEMS传感器的一个重要应用领域,它能够在所有的驾驶情况下提高车辆的行驶稳定性。通过传感器测量车辆的偏航率,并把它与其它参数类似转向角和速度一一进行比较,可以检测过度转向或转向不够这样的行驶状况。如果行驶过程中需要ESP发挥作用,那么,该系统会自动地分别制动车轮。因此,传感器提供的信号是ESP算法执行的根本基础,是提高行车稳定性的关键。 MEMS偏航传感器一般由容性硅振荡器构成,其周围是若干悬浮的网状材料。当受到垂直于振动轴的外部旋转运动的作用时,作用力使振动面出现偏离,从而导致电容的变化让驾驶员做出准确的操作。 目前,汽车安全系统应用中的偏航传感器的发展趋势是具有高偏移量稳定性、振动鲁棒性以及全数字信号处理功能。这使之比模拟传感器更为耐用。永久性的主动内部故障检测功能,使故障识别以及主动自测功能成为可能,因此,有助于增强可靠性。此外,根据整车系统设计的需要,传感器串由于采用了灵活的结构,能够在不同的车辆方向上监测偏航率以及加速度,因此,适合于高度动态以及高度精密的系统,如电子稳定程序、翻滚减轻系统以及电子主动操纵系统等等。偏航传感器与加速度传感器的结合构成一体化的传感器平台也是汽车传感器一大发展趋势。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城https://www.360docs.net/doc/0c18521693.html,/
剖析MEMS传感器的三大应用领域
剖析MEMS传感器的三大应用领域 来源:互联网 [导读] MEMS传感器是采用微电子和微机械加工技术制造出来的新型传感器。与传统的传感器相比,它具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,在微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。 关键词:可穿戴设备MEMS汽车电子 随着可穿戴智能设备的发展,特别是医疗可穿戴智能设备,主要依靠MEMS传感器,从而检测到穿戴者的身体各项信息。那么什么是MEMS传感器呢? MEMS即微机电系统(Microelectro Mechanical Systems),是MEMS传感器在微电子技术基础上发展起来的多学科交叉的前沿研究领域。经过四十多年的发展,已成为世界瞩目的重大科技领域之一。它涉及电子、机械、材料、物理学、化学、生物学、医学等多种学科与技术,具有广阔的应用前景。 截止到2010年,全世界有大约600余家单位从事MEMS的研制和生产工作,已研制出包括微型压力传感器、加速度传感器、微喷墨打印头、数字微镜显示器在内的几百种产品,其中MEMS传感器占相当大的比例。 MEMS传感器是采用微电子和微机械加工技术制造出来的新型传感器。与传统的传感器相比,它具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,在微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。 它的主要应用有一下三个方面: 1.应用于医疗 MEMS传感器应用于无创胎心检测,检测胎儿心率是一项技术性很强的工作,由于胎儿心率很快,在每分钟l20~160次之间,用传统的听诊器甚至只有放大作用的超声多普勒仪,用人工计数很难测量准确。而具有数字显示功能的超声多普勒胎心监护仪,价格昂贵,仅为少数大医院使用,在中、小型医院及广大的农村地区无法普及。此外,超声振动波作用于胎儿,会对胎儿产生很大的不利作用尽管检测剂量很低,也属于有损探测范畴,不适于经常性、重复性的检查及家庭使用。 基于VTI公司的MEMS加速度传感器,提出一种无创胎心检测方法,研制出一种简单易学、直观准确的介于胎心听诊器和多普勒胎儿监护仪之间的临床诊断和孕妇自检的医疗辅助仪器。 通过加速度传感器将胎儿心率转换成模拟电压信号,经前置放大用的仪器放大器实现差值放大。然后进行滤波等一系列中间信号处理,用A/D转换器将模拟电压信号转换成数字信号。通过光隔离器件输入到单片机进行分析处理,最后输出处理结果。
MEMS传感器的发展说课讲解
MEM传感器的现状及应用0引言 MEMS (微电子机械系统)传感器是利用集成电路技术工艺和微机械加工方法将基于各种物理效应的机电敏感元器件和处理电路集成在一个芯片上的传感器。20世纪60年代霍尼韦尔研究中心和贝尔实验室研制出首个硅隔膜压力传感器和应变计开创了MEMS技术的先河。此后,MEMS技术的快速发展使得MEMS 传感器受到各发达国家的广泛关注,与此同时,美国、俄国、日本等世界大国将MEMS传感器技术作为战略性的研究领域之一,纷纷制定相关的计划并投入巨资进行专项研究。 MEMS传感器具有体积小、质量轻、功耗低、灵敏度咼、可靠性咼、易于集成以及耐恶劣工作环境等优势,从而促进了传感器向微型化、智能化、多功能化和网络化的方向发展。步入21世纪以后,MEMS传感器正逐步占据传感器市场,并逐步取代传统机械传感器的主导地位,在消费电子产品、汽车工业、航空航天、机械、化工及医药等各领域备受青睐。 1 MEMS专感器的分类及原理 MEMS传感器种类繁多,按照测量性质可以分为物理MEMS传感器、化学MEMS传感器、生物MEMS传感器。按照被测的量又可分为加速度、角速度、压力、位移、流量、电量、磁场、红外、温度、气体成分、湿度、pH值、离子浓度、生物浓度及触觉等类型的传感器。目前,MEMS压力传感器、MEMS加 速度计、MEMS陀螺仪等已在太空卫星、运载火箭,航空航天设备、飞机、各种车辆、生物医学及消费电子产品等领域中得到了广泛的应用。 MEMS传感器主要由微型机光电敏感器和微型信号处理器组成。前者功能与传统传感器相同,主要区别在于用MEMS工艺实现传统传感器的机光电元器
件的同时对敏感元件输出的数据进行各种处理,以补偿和校正敏感元件特性不理想和影响量引入的失真,进而恢复真实的被测量。 待测量 / : 基片/ :——------- -------------- 图1.1 MEMS传感器原理图 MEMS传感器主要用于控制系统。利用MEMS技术工艺将MEMS传感器、MEMS执行器和MEMS控制处理器都集中在一个芯片上,则所构成的系统称为MEMS芯片控制系统。微控制处理器的主要功能包括A/D和D/A转换,数据处理和执行控制算法;微执行器将电信号转换成非电量,使被控对象产生平动、转动、 声、光、热等动作。 2 MEMS专感器的典型应用 2.1 MEMS压力传感器 MEMS压力传感器一般采用压阻力敏原理,即被测压力作用于敏感元件引起电阻变化,利用恒流源或惠斯顿电桥将电阻变化转化成电压,是目前应用最为 广泛的传感器之一,其性能由测量范围、测量精度、非线性和工作温度决定。这种传感器以单晶硅作材料,并采用MEMS技术在材料中间制成力敏膜片,然后在膜片上扩散杂质形成四只应变电阻,再以惠斯顿电桥的方式将应变电阻连接成电路,来获得高灵敏度。从信号检测方式来划分,MEMS压力传感器可分为压 阻式、电容式和谐振式等; 2.1.1 MEMS压力传感器在汽车上的应用 MEMS传感器是在汽车上应用最多的微机电传感器。汽车上MEMS压力传感器可用于测量气囊贮气压力、燃油压力、发动机机油压力、进气管道压力、空气过
MEMS传感器及其应用
MEMS传感器及其应用 科目:先进制造技术教师:周忆(教授)姓名:张雷学号: 专业:机械设计及理论类别:学术 上课时间:2011年11月至2011 年1月 考生成绩: 阅卷评语: 阅卷教师(签名)
MEMS传感器及其应用 张雷 (机械传动实验室) 摘要:和传统的传感器相比,微型传感器具有许多新特性,它们能够弥补传统传感器的不足,具有广泛的应用前景,越来越受到重视。文中简单介绍了一些微型传感器件的结构和原理及其应用情况。 关键词: MEM压力传感器;MEM加速度传感器;应用
1 引言 微机电系统(Microelectro Mechanical Systems,MEMS)是在微电子技术基础上发展起来的多学科交叉的前沿研究领域。经过几十年的发展,已成为世界瞩目的重大科技领域之一。它涉及电子、机械、材料、物理学、化学、生物学、医学等多种学科与技术,具有广阔的应用前景。目前,全世界有大约600余家单位从事MEMS的研制和生产工作,已研制出包括微型压力传感器、加速度传感器、微喷墨打印头、数字微镜显示器在内的几百种产品,其中微传感器占相当大的比例。微传感器是采用微电子和微机械加工技术制造出来的新型传感器。与传统的传感器相比,它具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,在微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。本文概述国内外目前已实现的微机械传感器特别是微机械谐振式传感器的类型、工作原理、性能和发展方向。 2 MEMS传感器的特点及分类 2.1MEMS传感器特点 MEMS传感器是利用集成电路技术工艺和微机械加工方法将基于各种物理效应的 机电敏感元器件和处理电路集成在一个芯片上的传感器。MEMS是微电子机械系统的缩写,一般简称微机电。如图1所示,主要由微型机光电敏感器和微型信号处理器组成。前者功能与传统传感器相同,区别是用MEMS工艺实现传统传感器的机光电元器件。后者功能是对敏感元件输出的数据进行各种处理,以补偿和校正敏感元件特性不理想和影量引入的失真,进而恢复真实的被测量。 图1 MEMS传感器原理图