Robocup3D仿真比赛关键技术的研究_个体技术的设计
第四章RoboCup3D仿真比赛中个体技术的设计
在RoboCup3D仿真比赛中,11个球员为了完成赢得比赛的共同目标而互相合作。两个球队之间的对抗实际上就是两个球队策略程序之间优劣的较量。比赛的结果很大程度上是由球员所具备的技能来决定的。仿真比赛客户端程序中,球员的技能实际上就是它所具备的能完成某个动作的能力,一个球员的行为特点也与它具备的技能有关,在多智能体系统中,单个智能体的技能对整个多智能体系统的性能有很大影响,体现在RoboCup3D中就是单个球员所具备的能力。球员所具备的技能可以分解成许多基本的动作,一些高级的动作正是由一系列基本的动作所组成的,整个球队的策略都可以理解为单个球员技能的协调与合作。
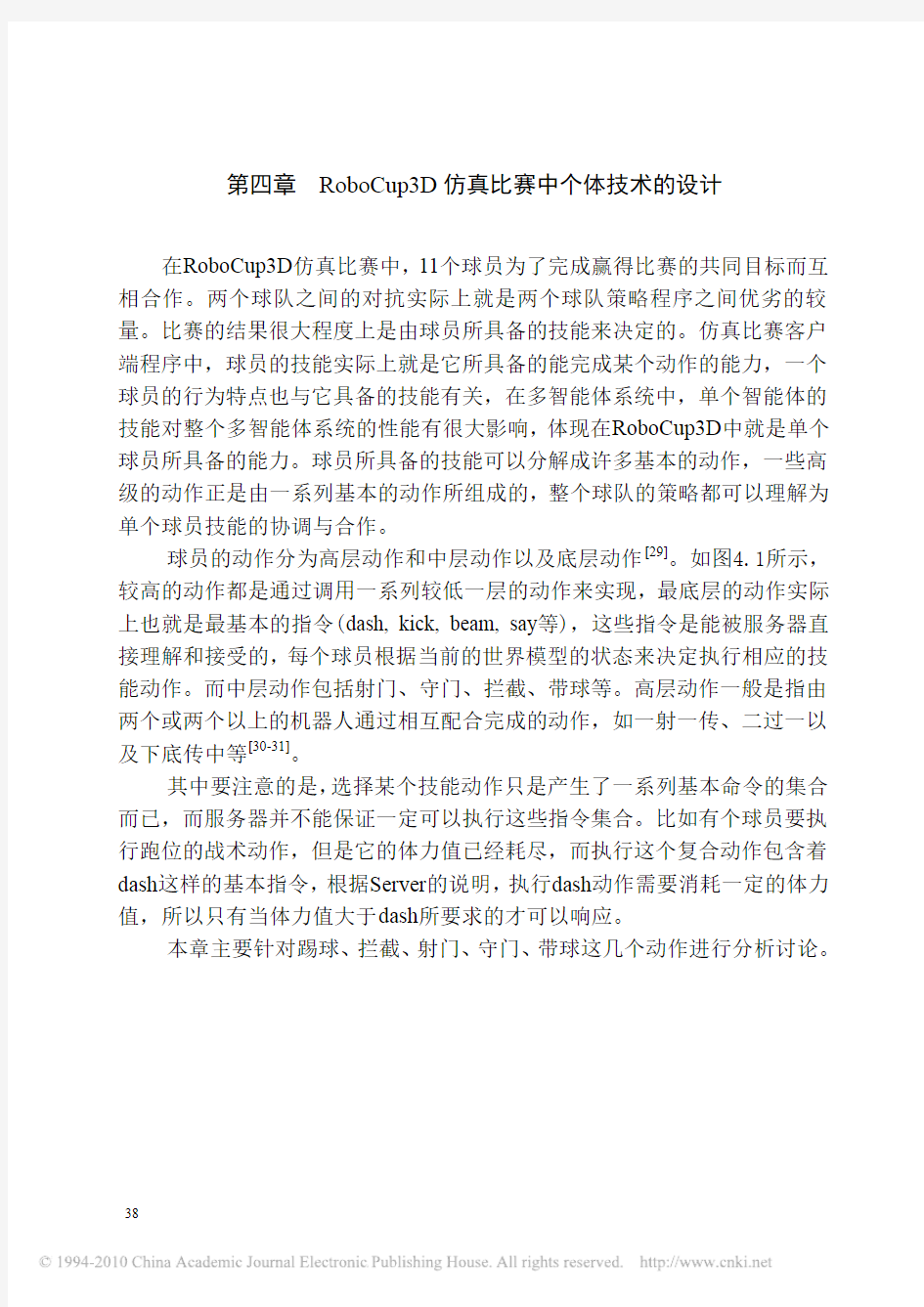
球员的动作分为高层动作和中层动作以及底层动作[29]。如图4.1所示,较高的动作都是通过调用一系列较低一层的动作来实现,最底层的动作实际上也就是最基本的指令(dash, kick, beam, say等),这些指令是能被服务器直接理解和接受的,每个球员根据当前的世界模型的状态来决定执行相应的技能动作。而中层动作包括射门、守门、拦截、带球等。高层动作一般是指由两个或两个以上的机器人通过相互配合完成的动作,如一射一传、二过一以及下底传中等[30-31]。
其中要注意的是,选择某个技能动作只是产生了一系列基本命令的集合而已,而服务器并不能保证一定可以执行这些指令集合。比如有个球员要执行跑位的战术动作,但是它的体力值已经耗尽,而执行这个复合动作包含着dash这样的基本指令,根据Server的说明,执行dash动作需要消耗一定的体力值,所以只有当体力值大于dash所要求的才可以响应。
本章主要针对踢球、拦截、射门、守门、带球这几个动作进行分析讨论。
图4.1个体动作的层次关系
4.1 踢球动作的设计
踢球动作有一定的复杂性,首先需要弄清它的基本模型。我们知道,球员的半径为0.22m,球的半径为0.111m,而踢球半径是0.04 m,直接加和就是0.371m,因此踢球时球员和球心平面距离的取值范围是0.32m到0.38m。距离远近和踢球效果没有明显关系,但踢球时速度沿球方向的分速度和踢球效果有关。
可以通过实验测得,当用最大力朝x轴方向可以踢平均26.64m远(距离误差来源于踢球时服务器加的力量噪声),且力量和球的总位移成正比。角度越大,总位移越小,如50度时只能踢17.5m。20度时最大高度为0.65m,可以飞过球员头顶。有趣的是如果往y轴方向踢,最远距离缩短为约20m,且朝其他方向踢时落点近似在以20m为短半轴26.6m为长半轴的椭圆上。在3D仿真比赛中,球员只能把球沿着中心连线的方向加速,而且踢球距离比2D小了很多,所以仅仅以当前身体状况,判断是否发出踢球命令,会由于误差浪费不少踢球的机会,从而降低了踢球效率。
球员在发出踢球命令之前要根据自身位置速度以及球的位置和速度,确定好踢球点、踢球方向和驱动力,即做出控制决策。身体控制是通过向周围
360度发出模为0—100的驱动力实现,由身体状态完全计算出控制决策,是比较复杂的过程,所以采取离散控制方案进行尝试,以期望提高踢球效率。
对驱动控制方案进行离散化,先将其角度以5度划分,共分为72个方向。且只使用0,20,30,50,70,100六种力度,则总共有361个控制方案。场上身体状态可以用一个四元组描述(Px,Py,Vx,Vy),考虑可以用相对距离表示一次运动的结果,则可仅用(Vx,Vy)表示当前状态。建立函数S(Vx,Vy,M),M为所使用的控制方案,该转移函数可以用数组表示,并在初始化时计算。
可以将踢球动作划分为下面几个阶段:
1) 向球冲刺,以最快速度接近球。(Drive阶段)
2) 跑向踢球点,以取得较好的身体位置保证将球踢到指定
方向。(Reach阶段)
3) 急停,将速度降至某界限以下,实现控制接近速度,以及急转
后的踢球。(Stop阶段)
4) 控制驱动的上限,较慢速接近球,并踢出。(kick阶段)
对于每次踢球的4个阶段由各种踢球级别进行不同的控制。主要是调整不同的踢球点,接近速度,驱动上限。通过身体与球连线和目标方向的夹角的余弦值cos?来辅助控制踢出方向,cos?=1 表示方向完全正确(一般不会发生),cos?<0 表示方向相反等等。控制方案会随拦截关系而临时调整,比如发现自己并不具有较多的优势时会更多的使用Drive,以更快的接近球。
实验表明,虽然提高了踢球的效率,但同时也牺牲了一些踢球精度。目前,在3D中对Agent的精度控制是比较困难的,特别是踢球,速度和精度是一对矛盾。
4.2 拦截动作的设计
截球动作是球员必须具备的基本技能之一,而截球技术首先要解决的就是对球运动的判断,从而做出正确的截球决策,这是其他高层决策的基础。
可以把拦球问题归纳成如图4.2的一个简单场景,d为球员到球的距离,a为球到球员之间的连线和球运动方向的夹角,s是球的即时运动速度,s随运动衰减。该问题就是通过已知的d、a、s,计算出球员正确的拦截角度b 和拦截时间t。
图4.2 截球场景
在第三章中我们已经得到了球的运动方程和球员的运动方程,将他们表示成两个参数方程。如下:
球的运动方程:(关于时间t 的参数方程)
00
(1)()(1)()qt x ball qt y ball v e x t q v e y t q ????=?????=?? (4-1) 球员的运动方程:(关于时间t ,和角度θ的参数方程,其中角度θ表示力的方向)
00(cos )(1)cos (,)(sin )(1)sin (,)qt x m m agent qt y m m agent v v e v qt x t q v v e v qt y t q θθθθθθ?????+=?????+?=?? (4-2) 再将其联立,解出球运动轨迹和球员运动轨迹的交点
()(,)()(,)ball agent ball
agent x t x t y t y t θθ=???=?? (4-3) 那么就可以得到t 和θ,也就是球员的拦截时间和拦截角度。由于方程里含有指数项,θ值不易推导出来,所以需用迭代法或是试探法求得最优拦截。
由于物理模型已知,可选择二分法求解[32]。
如图4.3,以队员到球运动轨迹上的垂点r为分界线,通过二分法试探,每一次试探,利用球在队员跑到球轨迹上的时候运动的距离确定解的上界与下界。第一次试探点为垂点r。如果试探结果解在垂点以前,以后的试探点都选取解的上、下边界的中点,即b和r的中点;如果解在垂点以后,而上界没有确定,则试探点为下界加上一个试探距离,一旦确定了上界,以后的试探选取二分点。通过反复的试探,可以很快地把解确定在一定精度的范围之内。但该方法没有考虑运动噪声,所以可能产生偏差,这个问题将在以后改进。
图4.3 二分法求解截球点
4.3 守门动作的设计
守门动作的实现是建立在截球基础上的。在Server06版中将球门高度从原来的0.5m改为1.6m,而门将的高度是0.44m,球的高度是0.222m,守门员要根据球飞来的高度判断是否需要跳起扑救。这里我们只讨论地面射门的情况。设计守门动作的关键就是确定门将的站位点和出击时机。
守门员在防守时的站位应该在一条与门线平行,并相距一定距离的直线上运动,根据球的位置确定最佳站位点。这里选择让守门员站在球与两个门柱连线的角平分线上,如图4.4所示,这样它扑救两边的距离是相等的了。但要注意保证门将总是位于球门的正面,避免站位过于靠边,形成球门前很大的空白区域,若对手不是选择直接射门而是传球,那么球门前方就完全在防守区之外了。为了防止守门员弃门而出,需要限制门将离球门最大的防守
距离,默认值是3m。
守门员的出击时机较难把握,主要是判断能否拦截到球,如果可以就出击,具体方法如4.2节所述。但我认为,当门将和球的距离在3m以内时,必须出击。也就是说,当球距离球门越近,守门员越容易出击,这样也更符合实际情况。
图4.4 守门员站位选择
4.4 射门动作的设计
射门动作主要有两种:地面射门和高空射门。这两种射门并没有本质区别,只是在踢球角度上有差别。下面只讨论地面射门。
地面射门,关键是要找射门点。鉴于目前对于球员的控制方面,我们做的精度不高,导致射门很容易偏出,所以做了如下改进:从左门柱开始到右门柱结束,期间每隔0.2m为一个选取点。对于每一个点,首先判断在该点和自己的连线左右25°的扇型范围内,是否有敌方球员,15°范围内是否有守门员。如果没有通过第一轮判断,则排除。在剩下的点中,比较出具有最大空隙扇型区域的点,取该点作为射球点。一般从球门中点开始判断。这样
偏出的几率比较小,而且射门成功率较高。见图4.5。
图4.5 选取射门点
射门角度的控制对射门成功率也很重要,角度越大,成功率越高。因此,当角度小于10度时,射门的概率很小,应该寻求更好的机会。主要思想是计算两门柱与球员的连线、守门员与球员的连线之间的夹角,选角度大者射门。如图4.6所示。
图4.6 射门角度选择
射门距离的选择上,以球门中心到球的距离为标准。根据测量的结果,队员最远能踢到26m左右,为保证成功率,射门距离选择为15m。
射门力量:地面球为100,即最大力量。高空球根据射门距离和踢球角
度(一般选择30度)计算出来。
实验结果统计得出:用上面的方法,射门成功率为百分之70左右;而如果只是选择球门中心为射门点,那么成功率仅为百分之50左右。具体实现代码请参看附录1。
4.5 带球动作的设计
4.5.1 采用人工势域法和A*算法带球
带球动作的主要目的就是选择一条安全有效的路线,来躲避敌方球员的拦截,到达目标点。它属于路径规划问题[33-34]。一种较为简单的方法是:将带球者前方的区域分为多个扇型区域,然后逐个判断是否有敌方球员,有则禁止朝此方向带球。虽然这种方法还算可靠,但如果出现不可预测的敌方球员方向突变,就很可能失误了。
目前有些队伍采用启发式搜索A*算法来得到最优路径,这种算法是对每个场上的物体做一次遍历,并且只是将对方球员所占据的区域标记为不可通过,简单说,就是一个二值的障碍物的映像,而不是一个“场”。它的缺点主要是所确定的评估函数往往不够客观,搜索时间太长。
因此,可以选择利用人工势域法和A*算法相结合来设计带球动作。对敌方球员(可看作障碍物)建立排斥势场,对目标点建立引力势场。将建立好的势函数加入到 A*算法的估价函数,从而规划出最佳路径,最终绕开障碍物到达目标点。人工势场法相对其他路径规划方法更适合于复杂的环境[35],由于人工势域方法建立在物理模型的基础之上,所以这种方法有着物理上的优越性。只要能将势函数取的足够的客观和准确,人工势域方法首先就能够用比较少的时间代价得到对带球区域的最准确描述。这样在得到了势场之后就能够“自然”的找出安全且高效的带球方向了,也就是能提前的算出过人的方向了。
4.5.2 势场的构建和改进
首先是构建一个人工势场,设x 是带球者当前所在的位置,()p u x 为目标位置对当前位置的引力势能,()p F x 为目标位置与当前位置之间的引力,()r u x 为敌方球员对当前位置的斥力势能,()r F x 为周围障碍物与当前位置之间的斥力。
引力势能为:
21()()2
p p u x k d x = (4-4) 式(4-4)中,p k 是引力场系数。 ()d x 是点x 到目标点的欧几里德距离。
在目标位置时,此函数为0。
引力为:
()()p
p p du F x k d x dx == (4-5)
斥力势能为:令()o s d x =
2000111()2()0r r k s s s s u x s s ??≤?=??>? (4-6)
式(4-6)中,()o d x 表示点x 到对方球员的欧几里德距离。r k 为斥力场系数。
0s 为斥力影响的最大距离。()o d x 大于这个上限0s 时,带球者将不再受到斥力
的作用。
斥力为:
0200111()()0r r k s s s s s F x s s ?????≤?=??>? (4-7)
那么当前位置的人工势能u(x)表示为:
()()()p r u x u x u x =+ (4-8) 当前位置的受力为:
()()()p r F x F x F x =+ (4-9)
带球者在人工势场内被引导沿着势域的梯度运动——即向下滑动。引力将带球者推向目标位置,斥力将带球者推向势能峡谷中。但是上述方法是基于静态控制的[36],而在RoboCup3D 仿真比赛这样的一个复杂动态的环境中,我们必须考虑带球者及敌方球员的动态特性,也就是把他们的速度加入到斥力势能函数当中去。
设v r , v o 分别是带球者和对方球员的当前速率,这里的速度是球员驱动力的等效速率。r α,o α分别是带球者和敌方球员速度的方向。 令cos()|cos()|
o r v o r ααταα?=?,则速度势能为: 2000111()2()0o r v v s s v s s u x s s ????≤?=??>?
(4-10)
速度受力为: 0200111()()0o v r v v s s v s s s F x s s τ?????≤?=??>?
(4-11)
那么改进之后的势能函数为: ()()()()p r v u x u x u x u x =++ (4-12)
当前受力为:
()()()()p r v F x F x F x F x =++ (4-13)
那么加入了双方球员速度的影响之后,该方法就能够更好的适应比赛的动态环境。当敌方球员向目标点靠近时,()v F x 为正值,减弱斥力,使带球者更容易向目标点靠拢;相反,若敌方球员远离目标点运动,()v F x 就为负值,与斥力叠加,斥力增强,带球者就很容易避开对手。
但人工势场法也有其自身的缺点,即容易出现局部极小值[37-38]。当目标位置离敌方球员距离较近的时候,带球者一方面受到引力的作用向目标点移
动,同时也更接近对手,就会受到更大的斥力作用。假如在这个过程中,斥力大于引力,那么带球者将不能够到达目标点,陷入了局部极小状态。为此,
可以在()0F x =的时候,
加入权值调整,增大引力势能的影响和减小斥力势能的影响,如下式:
))()(()()(x u x u x u x u v r r p p +Γ+Γ= (4-14)
式(4-14)中,p Γ为引力势能的权值,r Γ为斥力势能的权值,并且
1p r Γ+Γ=。通过改变它们的取值,就可以使带球者跳出局部极小,往势能减小的方向继续向目标点前进。
4.5.3 利用势场进行启发式搜索
构建好势场并得到势函数之后,利用A*算法寻找由起始点n s 到目标点n g 的最佳路径。其关键是定义一个性能良好的估价函数f ,在启发函数的选取上,做如下改进:
f = 势场值 + 起始节点到当前搜索节点的代价 + 当前搜索节点到目标节点的代价。它可以表示为:
f(n)=u(n)+g(n)+h(n) (4-15)
式(4-15)中,u(n)是当前点n 的势场值,可根据上节构造的势能函数计算
得出;
g(n)为起始点n s 到当前搜索点n 的实际代价;
h(n)为从当前点n 到目标点n g 的估计代价。
在这里,我们规定,g(n)代表搜索节点n 的深度;h(n)定义为每一个节点与目标位置之间的距离。
A*算法流程[39]如下:
1. 初始化Open 表和Close 表。Open 表是用来放未访问的节点,Close 表示用来放访问过的节点;
2. 将带球队员的位置即搜索的起始点压入Open 表中;此时g(n s )=0,
2/122))()(()(gy
sy gx sx s n n n n n h ?+?= (4-16) 式(4-16)中, n sx 和n sy 分别为起始点在x 和y 轴的坐标;
n gx 和n gy 分别为目标点在x 和y 轴的坐标。
3. 若Open 表不为空,取出Open 表的第一个节点,同时将这个结点放入Close 表中。(此处取出的节点应该是启发函数值最小的节点,这样Open 表在每扩展节点之后均要排序。而我们的算法没有排序,所以就取节点的时候即时找一个启发函数值最小的节点)。
4. 对当前节点n 进行扩展,如果新节点n ′超出搜索域,或已经在Close 表中,则放弃n ′;否则计算:
1)(+=′n n g (4-17)
2/122))()(()(gy
y gx x n n n n n h ?′+?′=′ (4-18) a . 如果 n'已在 Open 表中,则比较该节点的估价值)(n f ′与原来的函
数值的大小,如果)(n f ′更大则放弃n',否则,将原来的函数值进行
更新。
b . 若新节点在Close 表中且新节点的估价值小于Close 的函数值,则
把Close 表中相应的节点取出放入Open 表中。
c . 对Open 表进行排序。
5. 返回第三步,直到找到了目标节点。
图4.7是利用人工势域和A*算法设计带球动作的程序流程图。
图4.7 设计带球动作的程序流程图
4.5.5 仿真实验
在TsinghuAeolus3D2004底层源代码的基础上,用上述人工势场法和A*算法相结合改动带球程序dribble(),详细代码参见附录2。其中,双方球员和球的位置及速度可以通过收到的视觉信息得到,而引力场系数和斥力场系数可根据经验给出,之后可通过实验不断修正。利用监视器Monitor设计一过一
的测试场景,如下(位置用笛卡儿坐标表示):
进攻球员:位置(-1,0,0)速度(0,0,0)体力(100)
防守球员:位置(5,0,0)速度(0,0,0)体力(100)
球:位置(0 ,0,0)速度(0,0,0)
成功条件:进攻队员带球摆脱防守者并到达目标点(15,5,0)
失败条件:球被防守者拦截或带球者丢球
输出:失败次数及成功次数
这里先后用了两种方法进行比较,一个是改进的人工势域和A*算法相结合的方法,另一个是启发式搜索带球算法。对其做了长时间的测试,部分数据如表4.1和表4.2所示。两种方法的比较结果如表4.3所示。
表4.1 改进的人工势域和A*算法相结合的方法
球员终止位置球位置结果使用周期数第1次(21.3627,9.15863,0) (22.3732,8.64097,0) 失败65
第2次(15.1619,5.37383,0) (15.5223,5.02873,0) 成功58
第3次(14.9372,5.08469,0) (15.3875,5.26311,0) 成功52 ……………
第118次(15.0653,4.78654,0) (15.5426,4.85422,0) 成功51
表4.2 启发式搜索带球算法
球员终止位置球位置结果使用周期数第1次(11.2648,2.87243,0) (13.98272,6.4718,0) 丢球44
第2次(15.2347,4.67201,0) (15.52733,4.3472,0) 成功67
第3次(13.4728,8.62723,0) (12.48355,14.574,0) 失败59 ……………
第116次(9.14518,3.51865,0) (10.6567,8.34653,0) 失败54
表4.3 带球算法的测试结果
实验总周期数成功次数失败次数成功率
未改进的带球算法6000 68 48
58.621%
改进之后的带球算法6000 91 27
77.118%
测试表明,改进后的带球算法成功率高出原来算法的成功率,能够更加适应比赛的复杂环境,有效地完成带球动作。
4.6本章小结
这章内容主要设计了球员的五个基本动作,分别是踢球、拦截、守门、射门和带球。其中通过采用离散控制方案提高踢球效率,选用二分法计算球员的拦截点,采用改进的人工势域和A*算法相结合来实现带球动作的设计。并且将这些方法用于仿真比赛下进行了在线调试,使球员能够较好的完成预期工作,具有很好的实时性,能够满足仿真比赛的要求。
第五章RoboCup3D仿真比赛的决策的研究
RoboCup是一个充满合作和对抗的多智能体环境,队伍的整体策略是一个典型的分布式多智能体问题,它是充分利用现有资源来获取一个共同的集体目标,也就是获得比赛的胜利[40-41]。它的行为决策是从感知状态到执行动作的一种映射,基于感知建立一个环境的模型,并在这个基础上挑选最合适的动作[42]。而这个决策是依赖整个队伍的策略的,反过来队伍的策略就决定了这些个体的行为之间的协调关系。而每一个球员都在同一个策略体系下执行自己所在的那一部分,整支球队才能充分体现一种协调性。决策的大致流程可参看附录3。
由于对RoboCup3D仿真的研究还在初期阶段,加之3D底层物理规律的复杂性,我们目前还无法让Agen t既快速又高精度地完成任务。因此,在两者之间进行协调,把重点放在了底层控制方面,而决策就相应地做的较为简单。
场上球员可分为两类,普通球员和守门员。由于我们采用的是433的阵型,所以10个普通球员中又可分为四个后卫,三个中锋和三个前锋。那么本章主要是针对普通球员来设定整个决策流程的,如图5.1所示。而普通球员又只有有球和无球两种情况,这里将分别对其作详细分析。
5.1 有球队员的决策
在场上的队员,关键是有球队员的决策,它是整个比赛的关键。可以把场上的控制大致分为五部分,如图5.2所示。
1) 球在我方禁区
首要选择是传球给队友——他不能在我方球门附近,且他的周围人比较少;如果经过判断认为传不出去,对方逼得又不紧,那么就自
己从边路向前带球;对方紧逼,带球也不行,就以最大力量大脚开出,寄希望于依靠球速穿过敌方球员的身体。
园林绿化工程施工设计方案方案
目录 1. 工程概况 2.项目部组织结构框图 3.施工部署和主要工序施工方法 4.劳动力计划安排 5.施工质量的保证措施 6.施工工期的保证措施 7.文明施工的技术组织措施 8.安全施工的技术组织措施 9.环境保护的技术组织措施 10.绿化养护保活管理措施 11.计划用于本工程的施工机械设备表
第一章工程概况 1.1市华业物业管理玫瑰花园管理处位于市福田区香梅路与深南大道交汇处1018号,占地面积:28000平方米。主要施工处是玫瑰花园小区绿化改造。绿化改造工程由市创秾园艺发展施工。 将原有的老化植物假连翘、黄金叶、假花生、黄金叶球形更换成红黄金叶球形、七彩大红花球形、花继木球形、黄榕球形、鸭脚木、红花继木、玫瑰花等,工程质量严格按照合同履行,在中标后2天进场做施工准备工,工期计划10天。 1.2 本工程主要施工容有绿化种植、绿化养护工程。(详见工程量清单)。 1.3 本方案编制依据 1.4 香梅路与深南大道交汇处,玫瑰花园小区绿化改造工程; 1.5 玫瑰花园小区绿化改造工程招标文件和工程量清单; 1.6 现场调查及踏勘情况; 1.7 现行施工技术规及验收标准: 《城市绿化工程施工及验收规》(CJJT82—99) 其他有关施工技术标准、规和验收标准 1.8 我单位施工类似工程积累的技术和管理经验。
第二章项目部组织机构框图
第三章施工部署和主要工序施工方法 第一节绿化工程主要施工和要求 组织专人选购苗木,严格按照招标文件有关规定,合理定植,主要景点的孤植、丛植苗木应根据定植点的环境特点及施工、造景要求进行特选。 一、树木栽植工作要求: 树木栽植工作做好起运,合理安排,做到随起、随运、随栽、随剪、随架,尽量减少植物露天贮运时间,保证苗木成活率。植物的运送、储存和保护、种植前的修剪,应严格按照招标文件有关规定执行。 二、其他管理措施及说明 1、环保及环卫管理 我公司将根据建设方的要求,认真贯彻国家有关规定,做好施工现场的各项环保与环卫管理工作。 2、施工现场的环境保护 (1)在施工过程中实行全日保洁,对于施工产生的垃圾做到及时清理,不能及时清理的垃圾进行合理堆放,并在每天施工完毕后清理干净。生活垃圾日产日清,保证园区干净整洁。 (2)保证现场材料堆放整齐有序,场地平整、道路通畅、排水设施良好、无积存污水。 (3)合理安排流水作业,减少施工噪音对园区环境的影响。 3、其他环保措施的实施: 项目部经理对施工现场的环境保护工作负有直接责任,督促管理人员和施工人员树立环保意识,对施工中的各责任段管理人员实行环保责任人,环保措施贯彻得力者予以嘉奖,不力者予以批评或撤职处理。 三、绿化工程主要施工工序: A、绿化工程:换土→表层绿化地处理→定点放线→树穴开挖→绿篱沟槽开
CarSim与Simulink联合仿真
CarSim与Simulink联合仿真 1 软件介绍 在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具。可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具。最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。 CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。CarSim软件的主要功能如下: ●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV; ●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性; ●可以通过软件如MA TLAB,Excel等进行绘图和分析; ●可以图形曲线及三维动画形式观察仿真的结果; ●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率 谱分析模块; ●程序稳定可靠; ●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT, CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL 仿真; ●先进的事件处理技术,实现复杂工况的仿真; ●友好的图形用户界面,可快速方便实现建模仿真; ●提供多种车型的建模数据库; ●可实现用户自定义变量的仿真结果输出; ●可实现与simulink的相互调用; ●多种仿真工况的批运行功能; 2 CarSim与Simulink联合仿真 2.1 Simulink接口 1) 变量由Simulink导入CarSim(导入变量) 可由Simulink导入到CarSim中的变量可达160多个,主要分为以下几部分: ?控制输入
浅析城市景观设计中人文因素的重要性
浅析城市景观设计中人文因素的重要性 学生: 专业:环境艺术设计 指导教师: 摘要:城市景观设计不仅基于创新的想法与奇妙的思维,更应注重以人为本,在设计中体现出人文因素。历史文化包含的不仅是人文上的历史,更包括其本质的精神和思想,这正是人们传承的精华所在,良好的景观设计有着浓厚的文化背景支撑的同时,更多的应是其内在精神的呈现,徒有其表的城市景观是不能带来任何精神上的感受。而今愈来愈多追求经济效应的形式主义设计,忽略了其内在人文性的根本范畴。城市景观是聚居环境中固有、可创造的自然景观美,能增添舒适感和愉悦感。我希望通过一种模式、一种创新,来唤醒人们对于文化的重视,注重其本身的精神核心所在;忠于初衷,让人文性得以充分体现,而非单纯的为了一时的经济利益以求得到长远的经济价值和人文价值。 关键词:城市景观;人文因素;以人为本:文化背景;价值; Analysis on the Importance of Human Factor in the Design of Urban Landscape Student: Major:Environmental Art and Design Instructor: Abstract:Urban landscape design is not only based on innovative ideas and wonderful thinking should focus on people-oriented design reflects the "humanism". Contained in the history and culture is not only on the history, of the humanities, including the spirit and ideas of its essence, this is the essence of people's heritage. That is, the humanities. Good landscape design has a strong cultural background support while more should its inner spirit rendering. The Brummagem urban landscape is not bring any spiritual feelings, and now more and more to the pursuit of the formalism of the economic effect, ignored its intrinsic fundamental aspects of humanity. The urban landscape is inherent in the inhabited enviromnent and create a natural landscape beauty added com fort ajid pleasure, and I hopc that through a model. an innovative. to awaken people's attention for the culture, and focus on their own spiritual core. Faithful to the original intention of humanism to be fully reflected, rather than for the tempor ary economic interests in order to get a long-tenn economic value and cultural value. Key words: Urban Landscape; Humanistic; People-oriented; Culturalbackground; Value;
MATLAB系统仿真设计课程介绍
MATLAB系统仿真设计课程介绍Matlab是一种广泛应用于工程运算及数值分析领域的高级仿真平台。它功能强大、简单易学、编程效率高,深受宽敞科技工作者的喜爱。专门是Matlab还具有针对不同学科领域的工具箱,不需具备专门强的编程能力,就能够专门方便地进行各种系统的分析、处理和设计,它对数学建模、信号处理、系统分析等领域的学习,有着重要实践价值。 本课程是电子信息科学与技术、通信工程专业本科生的学科基础选修课。该课程的学习要求学生具有一定的MATLAB编程基础、数学思维能力、和专业基础知识。课程通过分析若干实际咨询题,建立符合实际情形的数学模型,并利用MA TLAB的强大功能,实现对实际系统的直观仿真,使学生在熟练把握MATLAB常用函数和专门的编程思想的同时,提升分析和解决实际咨询题的实践能力,以便为学生以后处理工程咨询题,从事科研活动和连续深造打下扎实的基础。 “科技创新实践”课程介绍 科技创新实践课程是一门以制造学为基础,以发明、设计、制作创新实体作品(包括专利申请文件)为目标的实践性专业选修课。旨在培养和提升学生运用制造学和本专业理论知识,进行创新实践的能力,为学生参加校内外的各类科技创新实践活动提供必要的预备。 本课程是电类专业本科学生的一门专业实践性课程,要紧针对我校电子信息类专业各年级的学有余力、乐于创新的本科生。通过本课程的学习和实践,能够培养学生良好的创新精神和创新能力,加深并扩大所学的理论知识范畴,强化学生运用差不多理论分析和处理实际咨询题的能力,同时有助于学生养成实事求是,一丝不苟,严谨的科学态度和独立工作能力。 “自动测试系统及接口技术课程设计”介绍 本课程要求学生自己设计并制作一个简单的测试仪器或系统,学生要按照教师指定或自己选择的题目,深入领会设计要求,自己动手查找资料,确定设计方案,画出电路图,选择并购买所用器件和材料,对硬件进行组
控制系统仿真
5.2设222(x,y,z)4y z f x x y z =+++,求函数f 在(0.5,0.5,0.5)附近的最小值。 解: >> fun=inline('x(1)+x(2)^2/(4*x(1))+x(3)^2/x(2)+2/x(3)','x'); >> x0=[0.5,0.5,0.5]; >> [x fval]=fminsearch(fun,x0) x = 0.5000 1.0000 1.0000 fval = 4.0000 → 函数f 在(0.5,0.5,0.5)附近的最小值为:4.0000 6.8求方程组1221x y z x y z x y z ++=??-+=??--=? 的解。 解: >> A=[1 1 1;1 -1 1;2 -1 -1]; >> b=[1;2;1]; >> B=[A,b]; >> rank(A),rank(B) ans = 3 ans = 3 >> X=A\b X = 0.6667 -0.5000 0.8333 → 方程组的解为:0.6667x =,=-0.5000y ,=0.8333z 6.11求函数3()sin t f t e t -=的拉普拉斯变换。 解: >> syms t; >> ft=exp(-3*t)*sin(t); >> Fs=laplace(ft) Fs = 1/((s + 3)^2 + 1) → 函数3()sin t f t e t -=的拉普拉斯变换为:21(s 3)1 ++
7.11单位负反馈系统的开环传递函数为 1000(s)(0.1s 1)(0.001s 1) G s =++ 应用Simulink 仿真系统构建其阶跃响应曲线。 解: 模型仿真图 1 单位阶跃响应曲线图 1 7.7用S 函数创建二阶系统0.20.40.2(t)y y y u =+=,0y y ==,()u t 为单位阶跃信号,使用Simulink 创建和仿真系统的模型。 解: function [sys,x0,str,ts] = sfun1(t,x,u,flag) switch flag, case 0 [sys,x0,str,ts]=mdlInitializeSizes; case 3 sys=mdlOutputs(t,x,u); case {1,2,4,9} sys=[]; end function [sys,x0,str,ts]=mdlInitializeSizes() sizes=simsizes;
最新完整版园林景观绿化工程施工组织设计
最新完整版园林景观绿化工程施工组织设计方案
目录第一章编制说明 第二章工程概况及特点 第三章施工部署和施工准备工作 第四章施工现场平面布置 第五章施工总进度计划 第六章各分部分项工程的主要施工方法 第七章拟投入的主要物资计划 第八章工程投入的主要施工机械设备情况 第九章劳动力安排计划 第十章确保工程质量的技术组织措施 第十一章确保安全生产的技术组织措施 第十二章确保文明施工的技术组织措施 第十三章确保工期的技术组织措施 第十四章季节性施工措施 第十五章成品保护措施 第十六章环境保护措施 附表一:投入本工程施工设备表 附表二:配备本工程的仪器设备 附表三:劳动力计划表 附表四:施工进度网络图
附表五:施工总平面图附表六:临时用地表
第一章编制说明 1、工程施工组织设计编制的依据 《**绿化景观工程施工招标文件》 《**绿化景观工程施工设计图》 《城市绿化工程施工及验收规范》 《工程测量规范》 《建筑地基基础工程施工质量验收规范》 《混凝土结构施工质量验收规范》 《混凝土质量控制标准》 《建筑工程施工质量验收统一标准》 《建设工程项目管理规范》 《混凝土强度评定标准》 《建筑电器安装工程施工质量验收规范》 2、工程施工组织设计编制原则 根据国家有关验收规范规定、国家标准、地方标准及建设单位和设计要求。
第二章工程概况及特点 1、工程名称:**绿化景观工程; 2、建设规模: 本工程为**化景观工程。包括主要工程项目:总平、门卫室及围墙工程。门卫室建筑面积为27.34平方米,建筑高度为3.15米;结构类型为砖混门卫室、钢结构装饰架,单层;防火等级二级,屋面防水等级为二级;抗震设防烈度七度,设计使用年限为50年。围墙总长393.88米。 3、建设地点及地理位置:**。 4、工期要求:计划工期50日历天; 5、质量要求:合格; 6、工程承包范围:施工图纸及工程量清单所载全部内容。
景观设计基本要素
景观设计基本要素. 一、园林围墙 空间、组织景色、安排导游而布置的围墙。这种情况在中国传统园林中是经常见到的。随着社会的进步,人民物质文化水平提高,"破墙透绿"的例子比比皆是。这说明对围墙的要求正在起变化,设计园林围墙时要尽量做到: 1 能不设围墙的地方,尽量不设,让人接近自然,爱护绿化。 2 能利用空间的办法,自然的材料达到隔离的目的,尽量利用。高差的地面、水体的两侧、绿篱树丛,都可以达到隔而不分的目的。 3 要设置围墙的地方,能低尽量低,能透尽量透,只有少量须掩饰隐私处,才用封闭的围墙。 4 使用围墙处于绿地之中,成为园景的一部分,减少与人的接触机会,由围墙向景墙转化。善于把空间的分隔与景色的渗透联系统一起来,有而似无,有而生情,才是高超的设计。围墙的构造有竹木、砖、混凝土、金属材料几种。 5 竹木围墙:竹篱笆是过去最常见的围墙,现已难得用。有人设想过种一排竹子而加以编织,成为"活"的围墙(篱),则是最符合生态学要求的墙垣了。 6 砖墙:墙柱间距3-4米,中开各式漏花窗,是节约又易施工、管养的办法。缺点是较为闭塞。 7 混凝土围墙:一是以预制花格砖砌墙,花型富有变化但易爬越;二是混凝土预制成片状,可透绿也易管、养。混凝土墙的优点是一劳永逸,缺点是不够通透。 8 金属围墙: 1)以型钢为材,断面有几种,表面光洁,性韧易弯不易折断,缺点是每2-3年要油漆一次。 2)以铸铁为材,可做各种花型,优点是不易锈蚀又价不高,缺点是性脆又光滑度不够。订货要注意所含成分不同。 3)锻铁、铸铝材料。质优而价高,局部花饰中或室内使用。 4)各种金属网材,如镀锌、镀塑铅丝网、铝板网、不锈钢网等。现在往往把几种材料结合起来,取其长而补其短。混凝土往往用作墙柱、勒脚墙。取型钢为透空部分框架,用铸铁为花饰构件。局部、细微处用锻铁、铸铝。围墙是长型构造物。长度方向要按要求设置伸缩缝,按转折和门位布置柱位,调整因地面标高变化的立面;横向则关及围墙的强度,影响用料的大小。利用砖、混凝土围墙的平面凹凸、金属围墙构件的前后交错位置,实际上等于加大围墙横向断面的尺寸,可以免去墙柱,使围墙更自然通透。 二、园亭 的亭,另是具有实用功能的票亭、售货亭等。 "亭者,停也。所以停憩游行也。"说明园亭是供人歇息休憩的地方,这是本文要叙述的对象。 园亭的位置选择 景好的地方,使入内歇足休息的人有景可赏留得住人,同时更要考虑建亭后成为一处园林美景,园亭在这里往往可以起到画龙点睛的作用。《园冶》中有一段精彩的描述:"花间隐榭,水际安亭,斯园林而得致者。惟榭只隐花间,亭胡拘水际,通泉竹里,按景山颠,或翠筠茂密之阿;苍松蟠郁之麓;或借濠濮之上,入想观鱼;倘支沧浪之中,非歌濯足。亭安有式,
浅析城市风景园林规划设计
浅析城市风景园林规划设计 发表时间:2019-09-03T09:08:42.573Z 来源:《防护工程》2019年12期作者:冯思瀚[导读] 在一定程度上,体现了当时人类文明的发展程度和价值取向及设计者个人的审美观念。广州市城市规划勘察设计研究院摘要:园林景观设计是在一定的地域范围内,运用园林艺术和工程技术手段,通过改造地形、种植植物、营造建筑和布置园路等途径创造美的自然环境和生活、游憩境域的过程。通过景观设计,使环境具有美学欣赏价值、日常使用的功能,并能保证生态可持续性发展。在一定程度上,体现了当时人类文明的发展程度和价值取向及设计者个人的审美观念。 关键词:风景园林;植物;规划设计 前言 城市风景园林规划的首要目的就是改善城市的生态环境。众所周知,在我国科技飞速发展的今天,化工产业不断扩大的同时,环境污染带来的灾害,成为了我国需要面临的一个重大问题。早些年的乱砍乱伐,造成了今天的土地沙漠化、洪水、泥石流……树木阻挡不了水土的流失、抵抗不了风沙的侵袭、其他动植物没有良好的栖息场所。而绿色植物可吸收二氧化碳,释放氧气,是大气的天然屏障,维护生态平衡最重要的因素。此外,绿色植物,还可以大量吸收有害气体、粉尘等来净化空气,并能够起到调节空气的温度、湿度、减小噪音、防尘、防风等作用,全面改善了城市生存环境。 一、城市风景园林规划的作用 对于处于起步阶段的中国现代景观规划设计,鲜明的视觉形象、良好的绿化环境、足够的活动场地,这是基本的出发点,随着景观环境建设的发展,仅仅满足这三方面,肯定还远远不够。但这毕竟是远期景观建设发展的基础,对于未来景观建设的腾飞将起到重要的作用。 近些年,我国开始加大对城市风景园林的建设,这不仅起到美化环境的作用,更提高了城市的整体面貌,象征了一个城市的精神文明。随着我国城市风景园林的不断完善,布局规划更加合理,配套设施越来越齐全,居民们的生活水平也有了很大提高,在这里,不仅是人们休闲娱乐的场所,还可以开展各种科普知识与活动来丰富头脑,充实人们的精神世界。 二、风景园林的效果呈现 园林景观设计要的效果呈现主要是实用、经济、美观。 (1)园林设计工作的特点是有较强的综合性,要求做到经济、实用、美观三者之间的辩证统一。三者之间的关系是相互依存,不可分割的。当然,同任何事物发展规律一样,根据不同性质、不同类型、不同环境的差异,彼此之间有所侧重。 (2)在园林设计过程中,"实用,经济,美观"三者之间不是孤立的,而是紧密联系不可分割的整体。首先要考虑适用的原则,因地制宜,具有一定的科学性,园林功能适合于服务对象。适用的观点带有永恒性和长久性。其次要考虑经济问题。正确的选址,因地制宜,巧于因借,就可以减少大量的投资,也解决了部分经济问题。园林建设要根据园林性质,建设需要确定必要的投资。也要考虑美观,既满足园林布局,造景的艺术要求。在某些条件下美观要求提到最重要的地位。美观本身就适用,就是观赏价值。孤置假山,雕塑作品等起到装饰、美化环境,创造出感人的精神文明气氛。 三、风景园林的设计标准 将居住环境规划作为城市环境中的一部分统筹考虑,使二者融为一体,满足不同年龄层次居民的需求,永远是园林环境设计的主要目的。小区的可识别性园林艺术是园林空间精神上的享受,节点细部设计优秀的设计在于整体布局合理,功能性强,具有深刻的文化内涵。 过去的居住小区规划往往是规划师先做小区总体布局,安排道路系统,布置住宅单体,随后建筑师接着进行住宅单体建设,往往在总体已定的前提下,才进行绿化设计。 景观设计设计师、开发商、业主三结合,业主共同需求即是我们设计的基本要求,相互的沟通能够使业主了解到居住环境的发展趋势将会是创造生态环境、追求人与自然共存,同时业主们的反馈意见也是我们获得的最直接的、第一手的、准确的景观设计定位,加之与开发商达成的共识,关注、掌握、完善人们所需的设施的配置与要求,创建符合业主要求的,清新、自然宜人的人居环境,把我们的住宅园艺景观质量推向新的阶段。 简述园林设计方面的几点原则: 1、强调设计与服务意识之间的互动关系,我们所希盼的掌声来自使用者的信任与满意。 2、设计的职责是创造特性,正如每个人都以其相貌、笔迹或说话方式上表现其各自独特个性一样,园林景观也是如此。 3、注重研究地域人文及自然特征,并作为景观形式或语言及内容创新的源泉。 4、环境和人的舒适感依赖于多样性和统一性的平衡,人性化的需求带来景观的多元化和空间个性化的差异,但它们也不是完全孤立的,设计时尽可能地融入景观的总体次序,整合为一体。 5、要充分考虑气候因素,尽量节约建设成本和维护成本。 四、园林设计中的植物配置 不论是何种工程类型,在利用植物进行园林设计时,必须明确各自的设计目的,然后根据需要和实际条件合理选取和组织所需植物。园林设计在取舍植物时要考虑以下几个要点:第一,初步设计要考虑不同规格植物的科学搭配。首先要确立大中规格乔木的位置,这是因为植物的配置、特别是大中规格乔木的配置将会对园林设计的整体结构和景观效果产生最大影响。较矮小的植物只是在较大植物所构成的结构中发挥更具人格化的细腻装饰作用。 第二,园林设计布局要着眼于植物品种的合理组合。选用落叶植物时,首先考虑其所具有的可变因素,使其通过植物品种的合理搭配产生独特的效果。选用针叶常绿植物时,必须坚持"适地适树、因地制宜"的原则,在不同的地方群植以免过于分散。在一个园林设计布局中,落叶植物和针叶常绿植物的使用,应保持一定比例和平衡关系,后者所占的比例应小于前者。也可将两种植物有效组合,使之在视觉上相互补充。
园林绿化工程施工设计方案文本
目录 第一章编制依据及原则................................................................................................... - 3 - 1.1 编制依据............................................................... - 3 - 1.2 编制说明............................................................... - 3 - 1.3 编制原则............................................................... - 3 -第二章工程概况............................................................................................................ - 5 - 2.1 工程概述............................................................... - 5 - 2.2 工程范围............................................................... - 5 - 2.3 工程名称............................................................... - 5 - 2.4 现场施工条件......................................................... - 5 - 2.5施工工期................................................................ - 6 -第三章施工、质量、安全管理体系................................................................................... - 6 - 3.1 拟用于本合同的主要管理人员.................................... - 6 - 3.2 项目主要管理机构职责分工....................................... - 7 -第四章施工准备与总平面布置及管理................................................................................ - 8 - 4.l 施工准备工作及管理................................................. - 8 - 4.2 施工总平面布置.................................................... - 11 - 4.3工期安排.............................................................. - 12 -第五章主要劳动力、材料、施工机具计划........................................................................ - 13 - 5.1 劳动力计划.......................................................... - 13 - 5.2 材料计划............................................................. - 13 - 5.3 施工机械计划....................................................... - 14 -第六章主要分部、分项工程的施工工艺方法 ................................................................. - 16 - 6.1 施工顺序............................................................. - 16 -
浅析城市景观设计中文化元素的运用
浅析城市景观设计中文化元素的运用 摘要:城市景观是文化的一部分,是一个城市文化内涵的外在表现,在经济发展全球化的战略下,当前景观设计界出现了一些问题――由于有些景观设计师对文化内涵不 够重视,所以出现了很多只注重形式,不注重内涵的景观设计作品,城市景观“趋同化”、“均质化”成为普遍现象,使得景观设计的文化性研究显得比任何时代都更加重要。本论文将从当代城市景观设计的现状分析入手,探讨城市景观文化内涵的构建和表现方式。 关键词:城市景观文化要素地域性环境 引言 美国建筑学家伊利尔.沙里宁认为:“让我看看你的城市,我就能说出这个城市居民在文化上追求的是什么。”说明城市文化是人类文化和理想的载体是城市建设过程中重要部分。然而当前由于过分追求效益,城市景观设计中出现了盲目照搬一些带有文化意味的符号,形成“干城一面”的景象。如今随着经济的高速发展和新的社会理念的不断显现,探索出一套高效的设计理论来指导城市景观设计,深入研究人文内涵已成为社会实践的热点和研究的焦点,利用用人文元素来改造城市景观设计的有效路径已成为城市景观研究的一
大趋势。 一城市景观设计的含义及特色 (一)城市景观的含义 景观设计在经历了一百多年的发展,设计上也更加注重人、文化与自然的和谐。地域文化是在一定区域范围内长期形成的历史遗迹、文化形态、宗教信仰等甚至是自然景观。将地域文化铭刻在景观之中,是地区内人们情感的寄托和归宿,也是塑造城市特色景观,提升城市景观价值和城市形象的重要部分。 城市景观设计涉及到对地域文化的挖掘和理解,以及地域文化特征与城市景观系统要素的相互结合。在这方面,中国古典园林艺术以及”人与大地”关系的古典哲学自古以来就是人类文化的典范,在《园冶》一书中把中国园林作为中国文化和诗情画意的综合体,着重于开掘其文化内涵、构景手法及其作为文学艺术综合体给人的身心感受。同样,西方国家也很早就已经开始关注城市景观中人文景观的设计,把其作为改观城市环境和个性重要的课题,并进行相当广度和深度的系统研究。 (二)城市景观的特点 第一,城市景观都是依据一定的自然景观建立起来的,自然景观奠定了城市景观的基础,也制约了城市景观的轮廓。如重庆多山的地形地貌造就了重庆山城的景观轮廓,苏
车辆综合的半实物仿真平台解决方案设计设计
车辆综合半实物仿真平台解决方案 车辆综合电子电气系统涉及到电子、总线、控制、人机交互等多个领域,功能复杂,研制难度大,研制单位往往缺乏系统级的验证平台。本方案依托国内外先进的开发工具(Tesis、Altia)以及自主研发的软硬件系统(HiGale),采用基于模型的设计理念,构建了车辆综合半实物仿真实验室,能够高效的解决用户复杂的电子系统仿真和测试的问题。 平台技术挑战 为车辆综合电子系统提供半实物仿真验证环境,以适应不同型号不同研制周期的综合电子系统设计验证、功能验证及性能测试的需要。平台建设的主要挑战如下: ?完整实现虚拟车辆动力传动系统、控制系统、车辆电器及防护系统四大系统的实时模型?通过真实物理信号实现虚拟车辆系统与综电系统的信号交换 ?系统具备故障注入功能,实现综电系统的故障注入测试及诊断功能测试 ?实现系统的友好人机交互、自动测试以及虚拟车辆运动三维及乘员视景 ?实现车际通讯指挥控制的仿真测试 平台解决方案
车辆综合半实物仿真平台按功能可划分为仿真控制中心、虚拟车辆、信号适配及故障注入系统、人在环系统四大部分。 在以上四大系统开发建设中,包含了很多先进的工具、开发流程及恒润多年积累的核心技术,主要包括:高性能仿真机系统、定制的硬件系统、定制模型开发、先进的人机交互终端解决方案、三维视景软件、实验管理系统软件等。 ?仿真控制中心 仿真控制中心为半实物仿真平台的管理中心,负责提供人机交互界面、电源管理、系统管理及仿真过程管理,可将仿真数据生成三维实时动画软件,并通过显示设备给予实验人员真实被控系统运动情况显示。
?虚拟车辆 虚拟车辆为仿真平台的核心,提供基于实时仿真计算机系统的动力系统、武器系统、电器系统、防护系统、环境系统的实时模型,并连接各种真实电器设备,包括控制开关、电控单元及各类执行设备,为电子控制系统提供了闭环测试环境、各类负载及显示环境。 ?虚拟实时仿真系统 虚拟实时仿真系统采用了国外仿真机和恒润自主研发的实时仿真机HiGale。其中,HiGale实时仿真系统基于高实时性、高可靠性的操作系统,提供了兵器行业专用的板卡,同时能够实现自动化测试的功能。 ?实时车辆仿真模型 实时车辆仿真模型是整个半实物仿真系统的核心,依靠先进的建模方法和丰富的建模经验,搭建了装甲车辆模型、伺服电机系统模型、武器系统模型以及三防系统模型。 ?信号适配及故障注入系统 信号适配及故障注入设备是半实物仿真系统与测试环境间的接口,不但提供了各种输入/输出信号的调理、负载模拟功能,同时也提供了进行常见电气故障注入的功能以及用于系
对汽车控制系统建模与仿真
对汽车控制系统建模与仿真 摘要:PID 控制是生产过程中广泛使用的一种最基本的控制方法,本文分别采用用简单的比例控制法和用PID控制来控制车速,并用MATLAB对系统进行了动态仿真,具有一定的通用性和实用性。 关键词:MATLAB 仿真;比例控制;PID 控制 1 MATLAB和PID概述 MATLAB是matrix和laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。 2车辆行驶过程车速的数学模型 对行驶在斜坡上的汽车的车速进行动态研究,可以分析车辆的性能,指导车辆的设计。MATLAB软件下的SIMULILNK模块是功能强大的系统建模和动态仿真的软件,为车辆行驶过程车速控制分析提供了一种有效的手段。 汽车行驶如图7.4.1所示的斜坡上,通过受力分析可知在平行于斜面的方向上有三个力作用于汽车上:发动机的力、空气阻力和重力沿斜面的分量下滑力。
园林绿化工程施工设计方案方案
新世纪花苑架空层室外园林绿化施工组织设计 (一)、工程概况 长沙市新世纪体育文化中心花苑小区住宅楼(3#)架空层室外园林绿化施工是2006年创建的精品景观架空层绿化,对提高长沙市城市品位、形象有着重要作用。 (二)、编制目的 为工程提供完整的纲领性文件,用以指导所承包工程的施工与管理,确保优质、高速、安全、文明、环保地完成本工程的建设任务。 (三)、编制依据 ①、按照招标文件要求: ②、现有的设计施工图纸。 ③、《城市绿化和园林绿化用植物材料木本草(CJ/T34-91)》 ④、《城市园林苗圃育苗技术规程(CJ14-86)》 ⑤、《城市绿化工程施工及验收规范(CJJ/T82-99)
⑥、施工经验。 (四)、编制原则 ①、以施工图纸为主导,并经充分现场考察,编制合理、经济的施工方案。 ②、施工总体部署合理、施工计划可行、高效,确保总体施工要求。 ③、采用先进的设备和科学的管理方式确保工程质量及施工安全。 ④、在施工全过程中采取周密的环境保护措施及文明施工措施。 (五)、指导思想 我公司施工组织的指导思想是:质量第一,服务周到、业主满意。以质量为中心,建立工程质量保证体系,选配高素质的项目经理、工程师及工程技术人员、管理人员、积极推广新技术、新工艺,精心组织,科学管理;优良高速地完成本工程的施工任务。 (六)、实施目标 发挥我公司的优势,科学地组织土方、人行道铺装及绿化地整理、栽植交叉作业,精心选材,严格履行合同,确保实现如
下目标: ①、质量目标: 整体工程达到优良工程标准。 ②、工期目标: 工期限定于月号前全部完工,总工期为90天,根据我公司的技术和管理水平,确保按甲方要求总工期提前完工。 ③、安全施工目标: 采取有效措施,杜绝安全事故,确保零事故率。 ④、文明施工目标: 确保文明施工,保证达到省级文明施工工地。 ⑤、服务目标: 信守合同,认真协调与各有关方面的关系,接受业主和监理及质检等有关部门对工程质量、工程进度、计划协调、现场管理的监督。 (七)、设备、人员动员周期和设备、人员及材料运到施工现的方法 1、结合本工程实际情况,在合格分供方名册中选择信誉高、施工质量好的民工队,并与之签订劳动合同,保证劳力供给。合理安排设备人员动员周期,为做好开工前准备工作:设备、人员分为两批进场,第一批进场设备 3、第二批进场设备为办公设备:
单片机软硬件联合仿真解决方案
单片机软硬件联合仿真解决方案摘要:本文介绍一种嵌入式系统仿真方法,通过一种特殊设计的指令集仿真器ISS将软件调试器软件Keil uVision2和硬件语言仿真器软件Modelsim连接起来,实现了软件和硬件的同步仿真。关键词:BFM,TCL,Verilog,Vhdl,PLI,Modelsim,Keil uVision2,ISS,TFTP,HTTP,虚拟网卡,Sniffer,SMART MEDIA,DMA,MAC,SRAM,CPLD缩略词解释:BFM:总线功能模块。在HDL硬件语言仿真中,BFM完成抽象描述数据和具体的时序信号之间的转换。PLI:Verilog编程语言接口,是C语言模块和Verilog 语言模块之间交换数据的接口定义。TCL:字面意思是工具命令语言,是一种解释执行语言,流行EDA软件一般都集成有TCL。使用TCL用户可以编写控制EDA工具的脚本程序,实现工具操作自动化。ISS:CPU指令集仿真器,可以执行CPU的机器码。TFTP:简单文件传输协议,Windows的tftp.exe既是该协议的客户端实现。SMART MEDIA:一种存储卡,常用于数码相机、MP3。DMA:直接内存访问。用于外部设备之间高速数据转移。MAC:媒体接入控制器。本文中是指网卡芯片。前言传统的嵌入式系统中,设计周期、硬件和软件的开发是分开进行的,并在硬件完成后才将系统集成在一起,很多情况下,硬件完成后才开始进行实时软件和整体调试。软硬件联合仿真是一种在物理原型可用前,能尽早开始调试程序的技术。软硬件联合仿真有可能使软件设计工程师在设计早期着手调试,而采用传统的方法,设计工程师直到硬件设计完成才能进行除错处理。有些软件可在没有硬件支持的情况下完成任务的编码,如不涉及到硬件的算法。与硬件相互作用的编码在获得硬件之前编写,但只有在硬件上运行后,才能真正对编码进行调试。通过采用软硬件联合仿真技术,可在设计早期开始这一设计调试过程。由于软件的开发通常在系统开发的后段完成,在设计周期中较早的开始调试有可能将使这一项目提早完成,该技术会降低首次将硬件和软件连接在一起时出现意外而致使项目延期完成所造成的风险。在取得物理原型前,采用软硬件联合仿真技术对硬件和软件之间的接口进行验证,将使你不会花太多的时间在后期系统调试上。当你确实拿到物理原型开始在上面跑软件的时候,你会发现经过测试的软件部分将会正常工作,这会节省项目后期的大量时间及努力。软硬件联合仿真系统由一个硬件执行环境和一个软件执行环境组成,通常软件环境和硬件环境都有自己的除错和控制界面,软件通过一系列由处理器启动的总线周期与硬件的交互作用。本文以一个Mini Web卡的开发介绍一种软硬件联合仿真系统。[!--empirenews.page--]该方案的核心是采用一个51单片机仿真引擎GoldBull ISS51(以下简称ISS51),ISS51是51单片机开发环境Keil uVision2的一个插件,ISS51具有连接Keil 和硬件仿真环境Modelsim的接口,可以实现软硬件同步仿真。在该系统中,Keil作为软件调试界面,Modelsim作为硬件仿真和调试界面,ISS51负责软件执行、监控软件断点、单步执行、内存和寄存器数据返回给Keil、CPU总线时序产生和捕获、内部功能模块(如定时器,串口)的运行等功能。Mini Web卡介绍Mini Web卡是一个运行在单片机上的Web服务器,提供网口连接,有大容量文件系统,提供TFTP和HTTP服务。尽管软件系统比较复杂,但优化编译后,执行代码还不足25K,为后续升级留下了足够空间。 51CPU采用SST89系列,这种CPU具有ISP功能,可以通过RS232串口,直接将目标码下载到CPU。DMA控制逻辑是一个可编程逻辑器件,采用的是ALTERA的CPLD EPM240,主要功能是实现外围器件之间的DMA传递。因为51CPU进行IO访问是很低效的,需要24个时钟周期才能进行一次IO访问,在外围设备之间转移数据则需要更多的时钟周期,使用DMA控制逻辑可以达到3个时钟周期就能转移一个字节。本系统中处理多种网络协议,需要大量报文收发和文件系统访问,采用DMA可以极大地提高51单片机的数据处理速度。DMA通道主要有MAC芯片与RAM之间的数据块转移,SMART MEDIA和RAM之间的数据块转移。网卡芯片采用的是AX88796,主要的优点是可以和51CPU方便地接口;支持100M以太网,速度高;有较大的接收报文缓存,能够平滑网络流量,减少因51CPU处理速度慢导致的报文丢弃和重发。SMART MEDIA是一个移动存储卡,主要用于存储文件,Mini Web卡支持8M到256M的SMD卡。文件系统是Mini Web卡的新开发模块,
基于Simulink仿真双闭环系统综合课程设计报告书
课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号200830460102 08自动化1班成员一:陈木生学号 200830460103 08自动化1班 指导老师: 日期: 2012-2-28 华南农业大学工程学院
摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速 Simulink 自动控制
目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料.......................................................