图解伺服电机选型实例
伺服电机计算选择应用实例
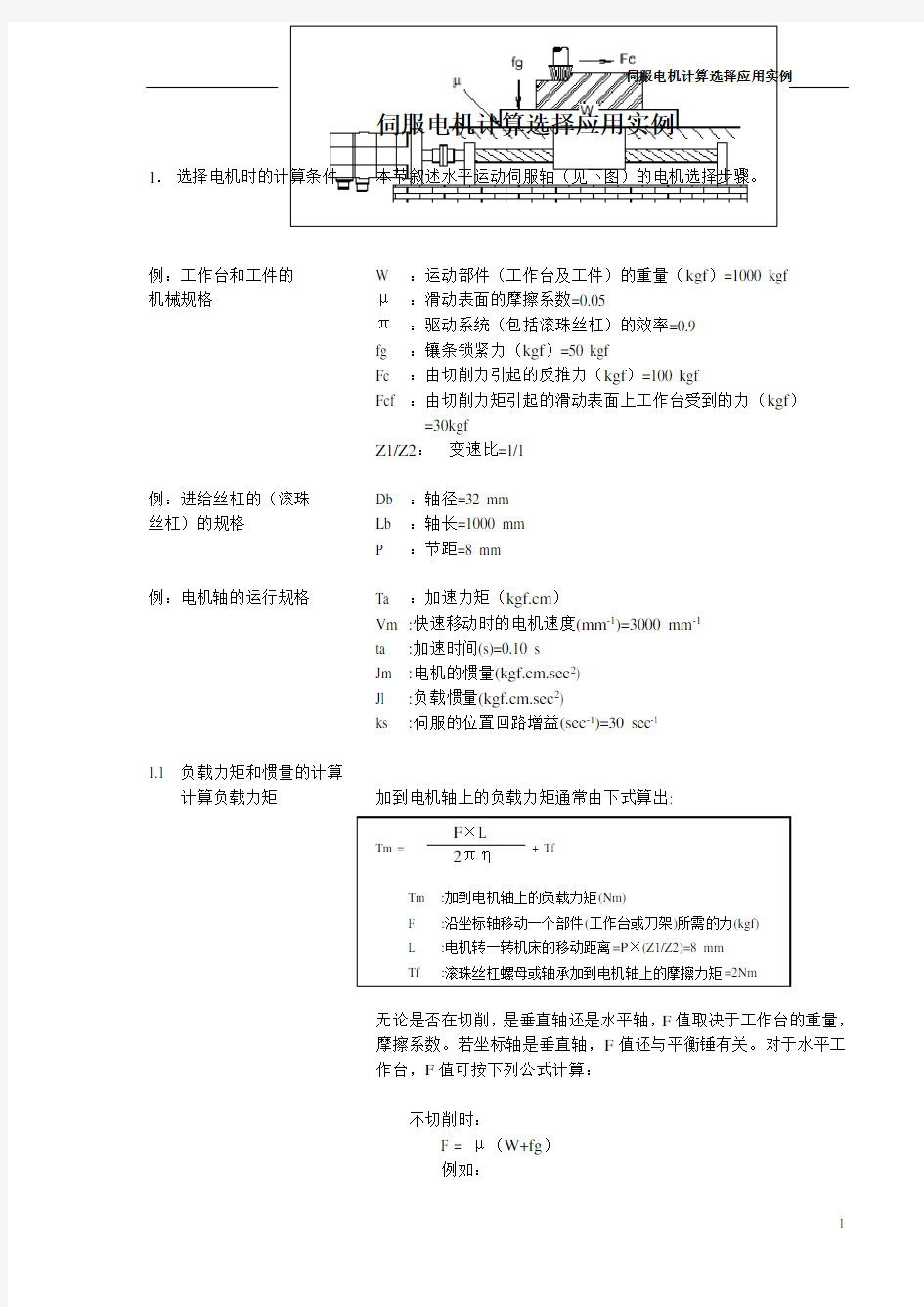
1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05
π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf
Fc :由切削力引起的反推力(kgf )=100 kgf
Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf )
=30kgf
Z1/Z2: 变速比=1/1
例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm
P
:节距=8 mm
例:电机轴的运行规格 Ta :加速力矩(kgf.cm )
Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2)
Jl
:负载惯量(kgf.cm.sec 2)
ks :伺服的位置回路增益(sec -1)=30 sec -1
1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:
Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm
Tf
:滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm
无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工作台,F 值可按下列公式计算: 不切削时:
F = μ(W+fg )
例如:
F ×L 2πη
F=0.05×(1000+50)=52.5 (kgf)
Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)
= 0.9(Nm)
切削时:
F = Fc+μ(W+fg+Fcf) 例如:
F=100+0.05×(1000+50+30)=154(kgf)
Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)
=2.1(Nm)
为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm ),最高转速应高于3000(min -1)。考虑到加/减速,可选择α2/3000(其静止时的额定转矩为2.0 Nm )。
·注
计算力矩时,要注意以下几点:
。考虑由镶条锁紧力(fg )引起的摩擦力矩
根据运动部件的重量和摩擦系数计算的力矩通常相当小。镶条锁紧力和滑动表面的质量对力矩有很大影响。
。滚珠丝杠的轴承和螺母的预加负荷,丝杠的预应力及其它一些因素有可能使得滚动接触的Fc 相当大。小型和轻型机床其摩擦力矩会大大影响电机的承受的力矩。
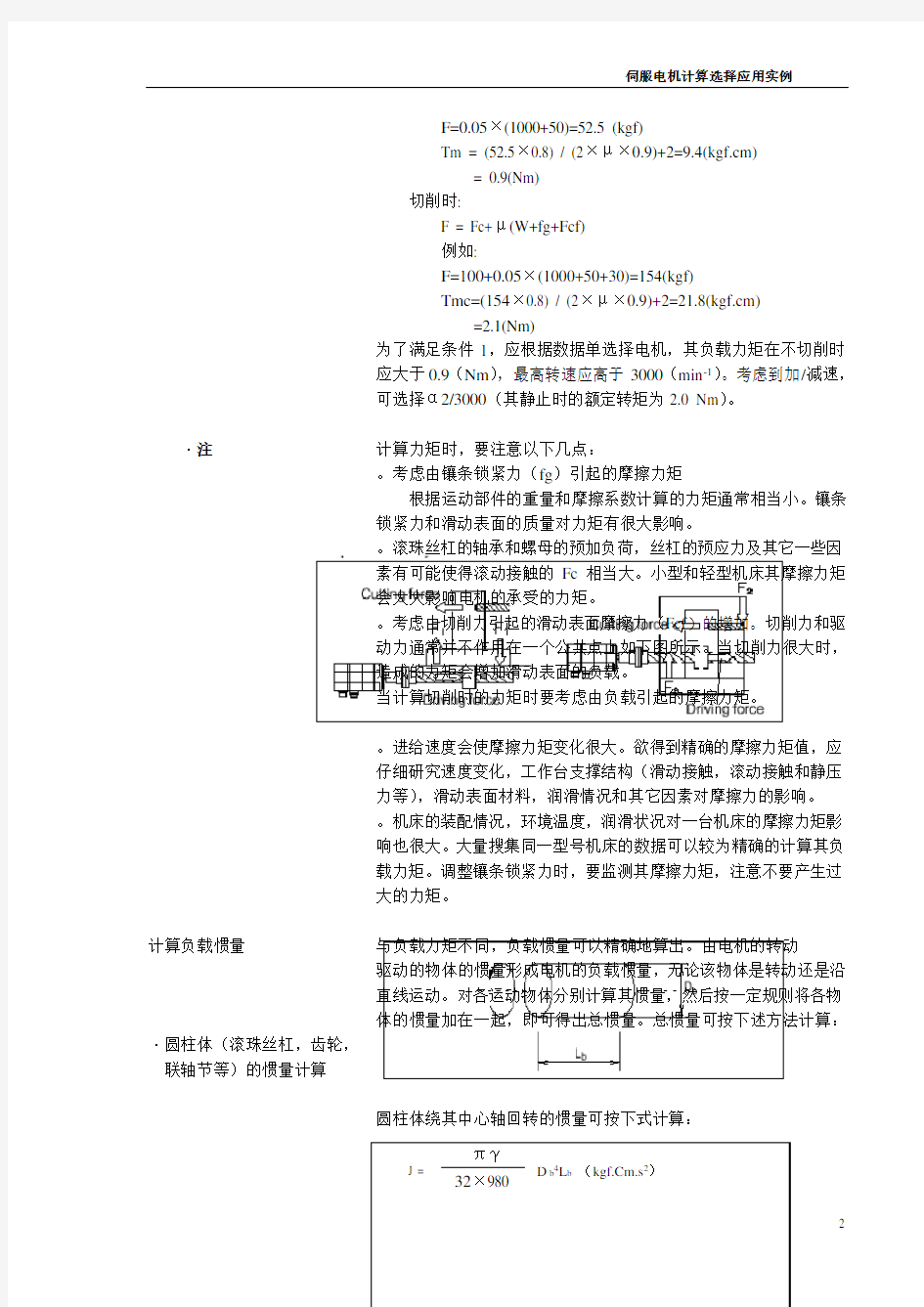
。考虑由切削力引起的滑动表面摩擦力(Fcf )的增加。切削力和驱动力通常并不作用在一个公共点上如下图所示。当切削力很大时,造成的力矩会增加滑动表面的负载。
当计算切削时的力矩时要考虑由负载引起的摩擦力矩。
。进给速度会使摩擦力矩变化很大。欲得到精确的摩擦力矩值,应仔细研究速度变化,工作台支撑结构(滑动接触,滚动接触和静压力等),滑动表面材料,润滑情况和其它因素对摩擦力的影响。 。机床的装配情况,环境温度,润滑状况对一台机床的摩擦力矩影响也很大。大量搜集同一型号机床的数据可以较为精确的计算其负载力矩。调整镶条锁紧力时,要监测其摩擦力矩,注意不要产生过大的力矩。
计算负载惯量
与负载力矩不同,负载惯量可以精确地算出。由电机的转动 驱动的物体的惯量形成电机的负载惯量,无论该物体是转动还是沿直线运动。对各运动物体分别计算其惯量,然后按一定规则将各物体的惯量加在一起,即可得出总惯量。总惯量可按下述方法计算:
·圆柱体(滚珠丝杠,齿轮, 联轴节等)的惯量计算
圆柱体绕其中心轴回转的惯量可按下式计算:
J = D b 4L b (kgf.Cm.s 2)
πγ
32×980
J : 惯量(kgf.cm.s 2)
γ :物体的比重(kg/cm 3) D b :直径(cm )
L b
:长度(cm )
若物体的材料是铁(其比重为7.8×10-3kg/cm 3), 则惯量的近似值为: J=0.78×10-6D b 4L b (kgf.cm.s 2)
例如: 滚珠丝杠的D b 为32mm ,L b 为1000mm ,其惯量为J b 为: J = 0.78×10-6×3.24×100 = 0.0082(kg.cm.s 2)
·沿直线运动物体(工
作台,工件等)的惯量
J = × ( )2 (kgf.cm.s 2)
W :沿直线运动物体的重量(kg)
L
:电机一转物体沿直线的移动距离(cm)
例如:
工作台和工件的W 为1000kg ,L 为8mm ,则其惯量计算得: J W = 1000/980×(0.8/2/π)2
= 0.0165(kgf.cm.s 2
)
·速度高于或低于电机
轴速的物体的惯量(惯量的折算)
惯量J 0折算到电机轴上后的计算方法如下: J = ( )×J 0 (kgf.cm.s 2)
J 0
:折算前的惯量(kgf.cm.s 2)
·回转中心偏离轴心 的圆柱体的惯量
J = J 0+ R 2 (kgf.cm.s 2)
J 0 :围绕圆柱体中心回转的转动惯量(kgf.cm.s 2) M :物体的重量(kg)
R
:回转半径(cm)
上述公式用于计算大齿轮等零件的惯量。为了减小重量和惯量,这
W
980
L 2π Z 1
Z 2
M
980
些零件的结构都是中空的。上述计算的惯量值的和是电机加速的负载惯量J 。
上述例子计算得到的J B 及J W 的和就是负载惯量J L 。
J L = 0.0082+0.0165 = 0.0247(kgf.cm.s 2)
·对负载惯量的限制
负载惯量对电机的控制特性和快速移动的加/减速时间都有 很大影响。负载惯量增加时,可能出现以下问题:指令变化后,需要较长的时间达到新指令指定的速度。若机床沿着两个轴高速运动加工圆弧等曲线,会造成较大的加工误差。
负载惯量小于或等于电机的惯量时,不会出现这些问题。若负载惯量为电机的3倍以上,控制特性就会降低。实际上这对普通金属加工机床的工作的影响不大,但是如果加工木制品或是高速加工曲线轨迹,建议负载惯量要小于或等于电机的惯量。
如果负载惯量比3倍的电机惯量大的多,则控制特性将大大下降。此时,电机的特性需要特殊调整。使用中应避免这样大的惯量。若机械设计出现这种情况,请与FANUC 联系。
1.2
加速力矩的计算
按下步骤计算加速力矩:
计算加速力矩:步骤1
假定电机由NC 控制加/减速,计算其加速度。将加速度乘 以总的转动惯量(电机的惯量 + 负载惯量),乘积就是加速力矩。计算式如下。
·直线加/减速
Ta = × 2π× ×Jm ×(1-e -ks 。ta )+
+ × 2π× ×J L ×(1-e -ks 。ta )÷η
Vr = Vm ×{1- (1- e -ks 。
ta )}
Ta :加速力矩(kgf ·cm) Vm :电机快速移动速度(min -1) ta :加速时间(sec) Jm :电机的惯量(kgf.cm.s 2)
J L :负载的惯量(kgf.cm.s 2)
Vr :加速力矩开始下降的速度(与Vm 不同) (min -1) Ks :位置回路的增益(sec -1)
η
:机床的效率
例子:
在下列条件下进行直线加/减速:
电机为α2/3000。首先计算电机和负载惯量,然后计算
加速转矩。电机惯量Jm 为0.0061(kgf.cm.s 2),Vm 为3000(min -1),ta 为0.1(s),ks 为30(sec -1),J L =0.0247(kgf.cm.s 2)。
Vm
60 1 ta
Vm 60
1
ta
1
Ta ·ks
Ta = 3000/60 ×2π×1/0.1×0.0061×(1-e -30×0.1
)+
+ 3000/60×2π×1/0.1×0.0247×(1-e -30
×0.1
)÷0.9
= 100.1(kgf.cm.) = 9.81(Nm)
由α2/3000的速度-转矩特性可以看到,9.81(Nm )的加速 力矩处于断续工作区的外面(见上面的特性曲线和电机的数据单)。(α2/3000的力矩是不够的。)
如果轴的运行特性(如,加速时间)不变,就必须选择大电机。比如,选择α3/3000(Jm 为0.02 kgf.cm.s 2),重新计算加速力矩如下: Ta = 123.7(Kg.cm) = 12.1(Nm)
Vr = 2049(min -1)
由该式可知,加速时,在转速2049(min -1)时,要求加速力矩为12.1 Nm 。由上面的速度-力矩特性可以看出,用α3/3000
电机可满足加速要求。由于已将电机换为α3/3000,则法兰盘尺寸已经变为130mm ×130mm 。若机床不允许用较大电机,就必须修改运行特性,例如,使加速时间延长。
·不控制加/减速时 速度 指令 转矩 Vm Ta
时间 公式为: Ta = ×2π× ×(Jm+J L )
Ta = 计算加速力矩:步骤2 为了得到电机轴上的力矩T ,应在加速力矩Ta 上增加Tm (摩擦力矩)。
T = Ta+Tm
T = 12.1(Nm)+0.9(Nm) = 13.0 (Nm)
计算加速力矩:步骤3
核算上面步骤2计算出的力矩T 应小于或等于放大器已限 定的力矩。用相应电机的速度-转矩特性和数据单核算由步骤1算得的Vr 时的T 应在断续工作区内。
因为Vr 为2049(min -1),T 为13.0(Nm),用指定的时间常数加速是
Vm 60
1
ta
1
ks
ta
可能的(条件2)。
1.3 计算力矩的均方根值
计算快速定位频率
绘制快速定位一个周期的速度-时间和转矩-时间图,如下 图。普通切削时,快速定位的频率不会有问题;但是,对于 有些频繁快速定位的机床必须检查加/减速电流是否会引起 电机过热。
根据力矩-时间图可以得到一个运行周期的加于电机上力矩 的均方根值。对该值进行核算,确保要小于或等于电机的额 定力矩(条件3)。 Trms =
Ta :加速力矩 Tm :摩擦力矩
To :停止时的力矩
如果Trms 小于或等于电机静止时的额定力矩(Ts ),则选择 的电机可以使用。(考虑到发热系数,核算时静止力矩应为 实际静止额定力矩的90%。 例子: 在下列条件下选用α3/3000(Ts=31 kgf.cm )=3.0Nm 的电机:
Ta=12.1 Nm,;Tm=To=0.9 Nm ;t 1= 0.1 s ;t 2=1.8s ;t 3=7.0s 。
Trms =
= 20.2 Nm < Ts ×0.9=2.9×0.9=2.61 Nm
因此,用α3/3000电机可以满足上述运行条件。(条件3)
计算在一个负载变化的 若负载(切削负载,加/减速度)变化频繁,其力矩-时间图 工作周期内的转矩Trms
如下图所示。用该图计算出力矩的均方根值后进行核算,和 上述一样,使其小于或等于电机的额定力矩。
1.4
计算最大切削 核算工作台以最大切削力矩Tmc 运动的时间(在负荷期间 力矩的负荷百分比
或ON 的时间)要在希望的切削时间内。(条件5)
如果切削时加于电机轴上的Tmc (最大负载力矩)--由§1.1 算得的—小于电机的静止额定力矩(Tc)与α(热效率)的乘积,则所选
(Ta+Tm )2 t 2+Tm 2t 2+(Ta-Tm )2t 1+To 2t 3
t 0
(12.1+0.9)2×0.1+0.92×1.8+(12.1-0.9)2×0.1+0.92×7
t 0
电机可以满足连续切削。若Tmc 大于该乘积(Tmc >Tc ×α),则按下述步骤计算负荷时间比(t on )。Tmc 可以在整个切削周期内加到电机上。(假设α为0.9,考虑机床运行条件计算负荷百分比。) Tmc <Tc ×α 可用最大切削力矩连续运行(用最大切削力矩运行的周期负荷百分比是100%)。
Tmc >Tc ×α
根据下图和公式计算周期负荷的百分比。
例如: 如§1.1的计算结果: Tmc=21.8 kgf.cm=2.1 Nm OS: Tc=30 kgf.cm=2.9 Nm
2.9×0.9=2.6 Nm >2.1 Nm=Tmc
连续切削不会有问题。
计算最大切削力矩的
周期负荷百分比
用§1.3所述的方法计算一个切削周期内力矩的均方根值,指定时间t on 和t off ,以使均方根值不要超过静止额定力矩Tc 与热效率α的乘积。则最大切削力矩的周期负荷百分比计算如下:
最大切削力矩的(Tmc )周期负荷百分比= ×100%
例如: 假设Tmc=4.0 Nm ;Tm=0.9 Nm
< 2.6 Nm 因此 <
即,非切削时间与切削时间的百分比为1.6,或更大一些。
周期负荷的百分比为:
×100 = 38.5%
所以,α3/3000电机满足上述选择条件1—5。
t on
T
4.02×t on +0.92×t off
t on +t of
t on
t off 1 1.6
t on
t off
3 电机的选择根据加于电动机上的负载,快速运动速度,系统的分辨率等
条件选择电机。本节后面的“伺服电机的选择数据表”,可
以帮助正确地选择。
将机床的数据添在表的1-3组中,寄到我公司的代表处,他
们将负责填写表中4-8组的电机数据,并将表寄回。表中数
据在§3.1和§3.2中详细解释。
3.1 非数据组
机床类型添入机床的型式,如:车床,铣床,加工中心等。
机床型号机床厂确定的型号。
CNC装置使用的CNC系统,如:0MC,15T,16M等。
主轴电机的功率该组用于检查伺服电机的输出功率。
轴的名称CNC指令使用的轴。若超过4个轴,添在第2张表上。
版本号,日期,名字等由FANUC填写。
3.2 数据机床厂需填写1,2,3组数据,其后的数据如果能够确定也
可以添入。如果确定不了,可由FANUC代表填写。各项的
详细内容如下所述。
No.1 组此组数据用于确定电机负载(惯量,力矩等)的近似值。该
组的全部数据都要添。
·轴的运动方向即运动部件如:工作台,刀架等的移动方向。若轴为斜向移
动,要添入与水平方向的角度(如60○)。
为了计算再生放电能量,无论是水平方向还是垂直方向都必
须指明。
·驱动部件的重量添入运动部件如工作台,刀架(包括工件,卡具等但不要包
含下一组中的平衡锤)等的最大重量。
·平衡锤垂直轴若有平衡锤请添入其重量,若用液压平衡请添入平衡
力。
·工作台支撑添入工作台滑板的类型,如:滚动,滑动或是静压。若有其
它形式的滑动导轨材料,请说明。
·进给丝杠按次添入丝杠的直径,节距,长度。
·传动比添入滚珠丝杠与进给电机之间的传动比,齿轮齿条时小齿轮
与进给电机间的传动比,回转工作台的转台与电机间的传动
比。
No.2组这组是选择电机的基本数据。其中某些数据的计算方法请见§4.1
和§4.2。
·电机每转的工作添入电机转一转时机床的实际移动量。例如:
台的移动量·当滚珠丝杠的螺距为12mm,变速比为2/3时,每转的移动量为
12×2/3 =8 mm
·若用于转台,变速比为1/72时,每转的移动量是
360×1/72 = 5 deg。
·CNC的最小输入单位添入NC指令的最小输入单位值。0,15,16,18系统为0.001mm。·快速移动速度添入机床实际要求的快速移动速度和坐标进给速度。
和进给速度
·惯量添入折算到电机轴上的全部负载惯量值。计算方法见§1.1。惯量
值不必很准确,添入2位或1位数即可。例如,0.2865可添入0.29
或0.3。注意该值不要包括毒剂本身的惯量值。
·负载力矩·由于在电机停止时也可能有非切削力矩,所以在考虑电机的连
续力矩时应留有一定余量。负载力矩要小于电机额定力矩的70%。
·快速运动的力矩要添入快速移动稳态时的力矩。要确保该值要小
于电机的连续额定力矩。该项数据不要包括加/减速所需力矩。
·进给时的切削力,要添入切削时进给方向的最大切削力。
·对于最大切削力矩,要添入上述加于电机轴的最大切削力的力矩
值。由于切削力产生的反作用力将大大影响力矩的传送效率,所以
要想得到精确地最大切削力矩,必须考虑其它数据或在机床上测
量。
·在垂直轴方向,若上升或下降的负载力矩值不一样,就应添入两
个值。
·最大负荷(加工)在“负载力矩”项中添入最大切削力矩的负荷比和ON时间。
时间/ON时间各值的意义如下图。
·快速移动定位的频率添入每分钟快速定位的次数。该值用来检查加/减速时电机
是否会发热及放大器的放电能量。
No.3 组这组数据用于检查位置编码器装在电机外部时伺服系统的
稳定性。当系统用直线光栅尺和分离型编码器时不要忘记添
入这些数据。
·分离型检测器若位置编码器装在电机外面,添入检测器的名称。若1使用
回转式检测器,在“标注(Remark)”栏中添入下列各项。
·旋转变压器
旋变转一转时机床的移动量。
旋变转一转时的波长数。
·脉冲编码器
脉冲转一转时机床的移动量。
脉冲编码器的脉冲数。
·机床进给系统的刚性该项添入力矩加于电机轴且最终的驱动部件(如工作台)锁
住时的力矩与移动量之间的关系值,的即1弧度角位移所用
的力矩值。例如:
力矩500kgf.cm时位移5deg的计算结果如下:
刚性= 500/5 ×180/π= 5730 kgf.cm/rad
若位移与力矩的关系是非线形的,可用原点附近的梯度计算。
力矩
(Nm)
T
e 位移(rad)
·反向间隙添入变换到工作台移动量的电机与最后驱动部件间(如工作
台)的间隙。
No.4 电机的规格。
·电机的型号添入电机的名称,内装反馈单元的规格。
·选择项,特殊规格添入特殊规格要求,如果有的话。
反馈(FB)型式
No.5 该组参数是指令的加/减速时间。并非定位的实际执行时间。·快速移动时加/减速时间加/减速时间根据负载惯量,负载力矩,电机的输出力矩和
加工速度决定。详细地计算见§1.2和§1.3。
FANUC的CNC快速运动时为线性加/减速。
·切削进给时的加/减速通常,切削进给时用指数函数加/减速。这组数据添入时间常数。
No.6
·输入倍乘比,指令
该组数据要求添入以最小输入单位移机床时的NC 所需的设定 倍乘比,柔性变速比
值。这些值的关系如下图示。
上图中,各比值必须设定,以保证误差寄存器的两个输入a 和b 要相等脉冲编码器用柔变速比。所以,CMR 通常设1。若不设1, 请与FANUC 商量。柔性变速比(F.FG )要设定电机轴转一转时 所要脉冲数与反馈脉冲数的比值算法如下:
F.FG =
注 计算时,α脉冲编码器的反馈脉冲数是1,000,000。分子和 分母的最大允许值是32767。分数要约为真分数。
例如:
NC 的脉冲当量为1μm ,电机一转机床的移动距为8mm , 使用A64脉冲编码器。则
F.FG = = , CMR=1
半闭环且1μm 检测单位F.FG 的设定如下:
8,000 1000,000,000
1
125
电机轴转一转要求的进脉冲数
1,000,000
·位置回路增益 该组参数根据惯量添入经验值。由于机床的刚性,阻尼和其它因 素的影响,这些参数并非总是可用的,通常是按实际机床确定。 若位置编码器装在电机的外面,这些值受机床的刚性,反向间隙, 摩擦力矩影响。这些值必须填写。
·减速停止的距离 在行程的终端,要考虑机床减速停止的距离,将其添入本组数据。
Vm
l 1 l 2 l 3
t 1 t 2
Vm :快速运动速度,mm/min 或deg/min 。 l 1 :由接收器的动作延时造成的运动距离。
l 2 :减速时间t 2造成运动距离。
l 3
:伺服的偏差量。
t 1 :通常为0.02秒。
移动距离 = ×(t1+ + )
k S :位置回路增益(sec -1)
·动态制动的停止距离
该距离是当故障时,切断机床电源动态制动停止造成移动距 离。
Vm :快速移动速率,mm/min 或deg/min l 1 :由于接收器的延时t1造成的移动距离 l 2
:由于磁接触器的断开延时t2组成的移动距离
l3 :磁接触器动作后动制动造成的移动距离 (t1+t2)通常大约为0.05秒
移动距离(mm 或deg )=
= ×(t1+t2)+(Jm+J1)×(Ano+Bno 3)×L
Jm :电机的惯量(kg.cm.s 2) J :负载惯量(kg.cm.s 2)
No :电机快速移动速度(rpm ) L
:电机一转机移动量(mm 或deg ) NoL=Vm
A 和
B 是常数,随电机而变各种电机的值见下面“动态制 动停止距离计算的系数”。
Vm 60
t2 2
1
k s Vm
60
No.8 组伺服放大器的规格。
·放大器的型式指定AC。
·变压器添入变压器的规格。
·放大器规格添入放大器模块的规格。
计算动态制动停止
距离的系数
计算A和B时,假设电源线每相的电阻为0.05Ω。由于电阻的
变化,表中的数值会稍有不同。
系数值还随伺服放大器改变。这些系数将引起机床停止距离的变
化。
FANUC LTD
FANUC LTD
伺服电机计算选择应用实例全解
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm F ×L 2πη
无论是否在切削,是垂直轴还是水平轴,F值取决于工作台的重量, 摩擦系数。若坐标轴是垂直轴,F值还与平衡锤有关。对于水平工 作台,F值可按下列公式计算: 不切削时: F = μ(W+fg) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm) 切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm) 为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时 应大于0.9(Nm),最高转速应高于3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止时的额定转矩为2.0 Nm)。 ·注计算力矩时,要注意以下几点: 。考虑由镶条锁紧力(fg)引起的摩擦力矩 根据运动部件的重量和摩擦系数计算的力矩通常相当小。镶条 锁紧力和滑动表面的质量对力矩有很大影响。 。滚珠丝杠的轴承和螺母的预加负荷,丝杠的预应力及其它一些因 素有可能使得滚动接触的Fc相当大。小型和轻型机床其摩擦力矩 会大大影响电机的承受的力矩。 。考虑由切削力引起的滑动表面摩擦力(Fcf)的增加。切削力和驱 动力通常并不作用在一个公共点上如下图所示。当切削力很大时, 造成的力矩会增加滑动表面的负载。 当计算切削时的力矩时要考虑由负载引起的摩擦力矩。 。进给速度会使摩擦力矩变化很大。欲得到精确的摩擦力矩值,应 仔细研究速度变化,工作台支撑结构(滑动接触,滚动接触和静压 力等),滑动表面材料,润滑情况和其它因素对摩擦力的影响。 。机床的装配情况,环境温度,润滑状况对一台机床的摩擦力矩影 响也很大。大量搜集同一型号机床的数据可以较为精确的计算其负
富士伺服电机选型计算资料
附录 ■容量选择计算■电脑编程器■参数表
附 附录 容量选择计算 (1) 机械系统的种类 用可变速电机驱动的机械系统,一般有以下几类。 机构特点 滚珠丝杠(直接连接) 用于距离较短的高精度定位。 电机和滚珠丝杠只用联轴节连接,没有间隙。 滚珠丝杠(减速) 选择减速比,可加大向机械系统传递的转矩。 由于产生齿轮侧隙,需要采取补偿措施。 齿条和小齿轮 用于距离较长的(台车驱动等)定位。小齿轮转 动一圈包含了π值,因此需要修正。 同步皮带(传送带) 与链条比较,形态上的自由度变大。 主要用于轻载。皮带轮转动一圈的移动量中包含π 值,因此需要修正。 将伺服系统用于机械系统中时,请注意以下各点。 ①减速比 为了有效利用伺服电机的功率,应在接近电机的额定速度(最高旋转速度)数值的范围使用。在最高旋 转速度下连续输出转矩,还是比额定转矩小。 ②预压转矩 对丝杠加预压力,刚性增强,负载转矩值增大。 由预压产生的摩擦转矩,请参照滚珠丝杠规格书。 ③保持转矩 升降机械在停止时,伺服电机继续输出保持力。 在时间充裕的场合,建议使用保持制动。
附-2
附录附 机构特点 链条驱动 多用于输送线上。必须考虑链条本身的伸长并采取相应的措施。在减速 比比较大的状态下使用,机械系统的移动速度小。 进料辊 将板带上的材料夹入辊间送出。 由于未严密确定辊子直径,在尺寸长的物件上将产生误差,需进行π补 偿。 如果急剧加速,将产生打滑,送出量不足。 转盘分度 转盘的惯性矩大,需要设定足够的减速比。 转盘的转速低,多使用蜗轮蜗杆。 主轴驱动 在卷绕线材时,由于惯性矩大,需要设定够的减速比。 在等圆周速度控制中,必须把周边机械考虑进来研究。
伺服电机计算选择应用实例
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm 无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工作台,F 值可按下列公式计算: 不切削时: F = μ(W+fg ) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm) 切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm) 为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时 应大于0.9(Nm ),最高转速应高于3000(min -1)。考虑到加/减速, F ×L 2πη
伺服电机的选型和计算
电机的选择: (1)电机扭矩的计算 负载扭矩是由于驱动系统的摩擦力和切削力所引起的可用下式表达: FL M =π2 式中 M-----电动机轴转距; F------使机械部件沿直线方向移动所需的力; L------电动机转一圈(2πrad )时,机械移动的距离 2πM 是电动机以扭矩M 转一圈时电动机所作的功,而FL 是以F 力机械移动L 距离时所需的机械功。 实际机床上,由于存在传动效率和摩擦系数因素,滚珠丝杠克服外部载荷P 做等速运动所需力矩,应按下式计算: z z M h h F M B sp SP ao P K 2 11122? ??? ??++=η ππ M 1-----等速运动时的驱动力矩(N.mm) π 2h F sp ao K ---双螺母滚珠丝杠的预紧力矩(N.mm) F ao ------预紧力(N),通常预紧力取最大轴向工作载荷 F max 的1/3,即 F ao = 3 1 F max 当F max 难于计算时,可采用F ao =(0.1~0.12))(N C a ; C a -----滚珠丝杠副的额定载荷,产品样本中可查: h sp -----丝杠导程(mm); K--------滚珠丝杠预紧力矩系数,取0.1~0.2; P---------加在丝杠轴向的外部载荷(N),W F P μ+=; F---------作用于丝杠轴向的切削力(N); W--------法向载荷(N),P W W 11+=; W 1-----移动部件重力(N),包括最大承载重力; P 1 -------有夹板夹持时(如主轴箱)的夹板夹持力; μ --------导轨摩擦系数,粘贴聚四氟乙烯板的滑动导轨副09.0=μ,有润滑条件时,05.0~03.0=μ,直线滚动导轨004.0~003.0=μ; η1 -------滚珠丝杠的效率,取0.90~0.95; M B ----支撑轴承的摩擦力矩,即叫启动力矩(N.m),可以从滚珠丝杠专用轴承样本中得到,见表2-6(这里注意,双支撑轴承有M B 之和的问题) z 1 --------齿轮1的齿数 z 2 --------齿轮2的齿数 最后按满足下式的条件选择伺服电机 M M s ≤1 M s -----伺服电机的额定转距
图解伺服电机选型实例
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm 无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工作台,F 值可按下列公式计算: 不切削时: F = μ(W+fg ) 例如: F ×L 2πη
西门子伺服电机选型手册
西门子伺服电机选择手册,SINAMICS S120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。普通异步电动机不能控制转矩,也不能控制三相异步电动机。 S120系列驱动与伺服电机选型手册第1部分:典型结构的多轴驱动控制单元电机模块与通用直流母线电源模块。带起动机(或scout)和SIMATIC manager软件或s7-300400的书本式柜式PC典型配置图,SIMOTION O/D/P 24 V DL说明:1:主控制模块cu320 2:电源模块SIM 或ALM+24 V电源3:单轴电机模块4:两轴电机模块234电源线终端模块驱动Cliq编码器反馈信号线选项板电抗器功率滤波器传感器模块无编码器电机运动控制,带drivc Cliq接口西门子(中国)自动化传动集团有限公司生产机械SINAMICS S120系列,选自《S120驱动与伺服电机选型手册》第1章多轴传动概述。Sinamics120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。它不仅可以控制普通的三相异步电动机,还可以控制步进电动机、转矩电动机和直线电动机。其强大的定位功能将实现进给轴的绝对和相对定位。2007年6月发布的DCC(drive control chart)功能将实现逻辑、计算和简单处理功能。SINAMICS S120产品包括:用于普通直流母线的DCAC逆变器和用于单轴的ACAC逆变器。具有公共直流母
线的DC/AC逆变器也称为多轴驱动。它的结构是电源模块和机器模块分开。电源模块将三个交流电整流成540V或600DC,并将电机模块(一个或多个)连接到直流母线。特别适用于多轴控制,特别适用于造纸、包装、纺织、印刷、钢铁等行业。优点是电机轴间能量共享,接线方便简单●单轴控制交流变频器,俗称单轴交流传动,其结构是功率模块和电机模块的组合,特别适合单轴速度和定位控制。本书第一部分包括第1至4章,主要介绍多轴交流传动。第二部分包括第五章至第八章,主要介绍单轴交流传动。第三部分包括第九章,主要介绍电机电缆和信号电缆。第四部分包括第10章,介绍了同步和异步伺服电机的指令数据。第五部分,包括第11章,简要介绍了运动控制系统的指令数据。这本书中的技术资料基本上是英文的。详情请参阅英文原文。西门子(中国)有限公司自动化与传动集团运动控制部生产的机械系列S120系列,源自《S120驱动与伺服电机选型手册》第二章。功率模块是我们通常所说的整流器或整流器/反馈单元。它将三相交流电整流成直流电,并为每个抑制模块(通常称为逆变器)供电。具有反馈功能的模块还可以向电网提供直流电。根据是否有反馈功能和反馈方式,将功率模块分为以下三类:基本线路模块:整流单元,但无反馈功能。智
关于伺服电机与步进电机性能比较及选型的计算方法
关于伺服电机与步进电机性能比较及选型的计算方法 内容来源于 https://www.360docs.net/doc/2f8480004.html,/%C5%C9%BF%CB%D6%B1%C1%F7%B5%F7%CB%D9%C6%F7/blog/i tem/61656f385baf28de7c1e7129.html 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。 1、伺服电机和步进电机的性能比较 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如山洋公司(S A N Y O D E N K I)生产的二相混合式步进电机其步距角可通过拨码开关设置为 1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以全数字式交流伺服电机为例,对于带标准2000线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/8000=0.045°。对于带17位编码器的电机而言,驱动器每接收131072个脉冲电机转一圈,即其脉冲当量为360°/131072 =0.0027466°,是步距角为 1.8°的步进电机的脉冲当量的1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。
交流伺服电机选型重点学习的手册范本.doc
ST 系列交流伺服电机型号编号说明 1:表示电机外径 , 单位 :mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位: rpm。 6:表示电机适配的驱动器工作电压,L— AC220V, H— AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ), R— 1 对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示 IPM 模块的额定电流( 15/20/30/50/75A ) 3:表示功能代码( M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机ST系列电机ST 系列电机主要参数 适配驱动器 额定功率 电机型号额定转矩额定转速外形尺寸零售价 ( 元 ) 110ST-M02030 2 Nm 3000rpm 110×110×158 1500 110ST-M04030 4 Nm 3000rpm 110×110×185 1700 110ST-M05030 5 Nm 3000rpm 110×110×2001800 110ST-M06020 6 Nm 2000rpm SD15M 110×110×217 1900 SD20MN 110ST-M06030 6 Nm 3000rpm SD30MN 110×110×217 1900 SD50MN 130ST-M04025 4 Nm 2500rpm SD75MN 130×130×163 1800 130ST-M05025 5 Nm 2500rpm 130×130×171 2100 130ST-M06025 6 Nm 2500rpm 130×130×181 2400 130ST-M07720Nm2000rpm130×130×1952900
伺服电机原理及选型规则
伺服电机原理及选型规则
2011-8-4 8:00:00 来源:
[摘要]:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装 置。伺服电机是可以连续旋转的电-机械转换器。作为液压阀控制器的伺服电机,属 于功率很小的微特电机,以永磁式直流伺服电机和并激式直流伺服电机最为常用。 [关键词]:伺服系统 发动机 马达 变速装置 伺服电机 什么是伺服电机? 伺服电机:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装 置。伺服电机是可以连续旋转的电-机械转换器。作为液压阀控制器的伺服电机,属 于功率很小的微特电机,以永磁式直流伺服电机和并激式直流伺服电机最为常用。 伺服电机的作用:伺服电机可使控制速度,位置精度非常准确。 伺服电机的分类:直流伺服电机和交流伺服电机。 直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。具有起动转 矩大,调速范围宽,机械特性和调节特性的线性度好,控制方便等优点,但换向电刷 的磨损和易产生火花会影响其使用寿命。 近年来出现的无刷直流伺服电机避免了电刷 摩擦和换向干扰, 因此灵敏度高, 死区小, 噪声低, 寿命长, 对周围电子设备干扰小。 直流伺服电机的输出转速/输入电压的传递函数可近似视为一阶迟后环节,其机 电时间常数一般大约在十几毫秒到几十毫秒之间。而某些低惯量直流伺服电机(如空 心杯转子型、印刷绕组型、无槽型)的时间常数仅为几毫秒到二十毫秒。 小功率规格的直流伺服电机的额定转速在 3000r/min 以上,甚至大于 10000r/min。因此作为液压阀的控制器需配用高速比的减速器。而直流力矩伺服电机 (即低速直流伺服电机)可在几十转/分的低速下,甚至在长期堵转的条件下工作, 故可直接驱动被控件而不需减速。 直流伺服电机分为有刷和无刷电机。 有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护, 但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感 的普通工业和民用场合。 无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩 稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换 相。 电机免维护, 效率很高, 运行温度低, 电磁辐射很小, 长寿命, 可用于各种环境。 交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同 步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着 功率增大而快速降低。因而适合做低速平稳运行的应用。 交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的 U/V/W 三相电形成电磁场,转子 在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈 值与目标值进行比较, 调整转子转动的角度。 伺服电机的精度决定于编码器的精度 (线
伺服电机如何进行选型
伺服电机选型技术指南 1、机电领域中伺服电机的选择原则 现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。 各种电机的T- 曲线 (1)传统的选择方法 这里只考虑电机的动力问题,对于直线运动用速度v(t) ,加速度 a(t)和所需外力 F(t) 表 示,对于旋转运动用角速度(t) ,角加速度(t)和所需扭矩 T(t) 表示,它们均可以表示 为时 间的函数,与其他因素无关。很显然。电机的最大功率P 电机,最大应大于工作负载所 需的峰值 功率 P 峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的 传动机构中它们是受限制的。用峰值, T 峰值表示最大值或者峰值。电机的最大速度决 定了 减速器减速比的上限, n 上限 = 峰值, 最大 / 峰值,同样,电机的最大扭矩决定了减速比的下 限, n 下限 =T 峰值 /T 电机,最大,如果 n 下限大于 n 上限,选择的电机是不合适的。反之,则可以通过对每 种电机的广泛类比来确定上下限之间可行的传动比范 围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁 琐。 (2)新的选择方法 一种新的选择原则是将电机特性与负载特性分离 开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方 便,另外,还提供了传动比的一个可 能范围。这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力 的 各个参数均可用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检 查 电机是否能够驱动某个特定的负载。 在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转, 产生较大的加速度,因此电机需要较大的惯量扭 矩。选择一个合适的传动比就能平衡这相反 的两个方面。通常,应用有如下两种方法可以找到这个传 动比n,它会把电机与工作任务很好地协调起来。一是,从电机得到的最大速度小于电机自身的最大 速度电机,最大;二是,电机任意时刻的标准扭矩小于电机额定扭M 额
PARKER伺服电机SMN选型手册
High-Torque Design, Compact Package Parker’s SMN series of rotary servo motors combines a high-performance segmented stator design with competitive pricing for today’s demanding servo applications. The modern eight-pole segmented stator architecture produces extremely high torque values for a given motor volume. The SMN motor family is offered in frame sizes ranging from 60 mm to 142 mm and is available with resolver, quadrature encoder or high-resolution SinCos feedback devices.SMN Motor Features ? High performance per dollar ? High torque density package ? 1.4 – 14.5 N-m continuous torque range ? Brushless construction ? Resolver, encoder or SinCos (absolute) feedback ? Five frame sizes from 60 mm to 142 mm ? IP64 standard ? IP65 option Motor Part Numbering System Series SMN -SMN Family Frame 060 - 60mm 082 - 82mm 100 - 100mm 115 - 115mm 142 - 142mm Stack 2 Winding P Q S T V Z Feedback Type Feedback Resolution 41 - Resolver, single speed 2F - Quadrature encoder, 2048 line 5D - SinCos w/ Hiperface? absolute encoder (Stegmann) Shaft K - Keyway Connector P - PS style Options N - None B - Holding brake V - IP65 (shaft seal)
电机选型案例
小白进阶篇—电机选型案例集 主讲:小丸子教育—泽雨老师 目的:掌握不同电机在不同工况下的选型问题 课程内容: 1,皮带输送线电机选型 设计要求: 20Kg 物料X 2 传送速度1m/s 加速时间0.15s 已知条件: 摩擦系数=0.2 机械效率=90% 滚子直径=200mm 1. 计算功率 s rad mm s mm mm s m D V T P M N R F T N F F N N N s s m Kg s m K a m f F /102002/10002002/14.282843 1 12131338015.0/120/102.0g 402 =??=??=?=?=?=?==?+==+=?+??=?+=π ππππ)(辊筒辊筒 辊筒 负载负载辊筒皮带拉力负载负载皮带拉力负载ωω
W W W P K P KW r T P M N M N T mm s mm r n n i i T T W s rad M N T P 3823829 .02862.1286.09550 min /14409.115 4.2815200/1000min /1440284/104.28==?=?==?=?=?==?=== =??=?=ηω电机 实际电机电机电机负载电机 传动比 负载电机辊筒负载负载校验:π
设计要求; M=50Kg 运行速度1m/s 加速时间0.25s 直线导轨摩擦系数0.1 带轮直径100mm [] N s m Kg s s m Kg s m Kg a m g m F 250/)25 .01 5010501.0(25.0/150/10501.02 2 =??+??=? +??=?+??=μ负载
伺服电机选型计算公式
伺服电机选型计算公式 伺服电机选择的时候,首先一个要考虑的就是功率的选择。一般应注意以下两点: 1。如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。 2。如果电机功率选得过大.就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。 也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较: P=F*V/100 (其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s) 此外.最常用的是采用类比法来选择电机的功率。所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。 验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。 如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。 如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。 实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。即T = 9550P/n 式中: P —功率,kW;n —电机的额定转速,r/min;T —转矩,Nm。
伺服电机及选型
伺服电机及选型 GE GROUP system office room 【GEIHUA16H-GEIHUA GEIHUA8Q8-
伺服电机 伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 “伺服”一词源于希腊语“奴隶”的意思,“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。因此伺服电机指的是随时跟随命令进行动作的一种电机,是以其工作性质命名的。 伺服主要靠脉冲来定位,伺服电机接收到一个脉冲就会旋转一个脉冲对应的角度,从而实现位移。伺服本身带有编码器,具备发出脉冲的功能,所以伺服电机每旋转一个角度,就会发出对应数量的脉冲。等于是把电机旋转的详细信息反馈回去,形成闭环。这样的话,系统就会知道发了多少脉冲给电机,同时又收了多少脉冲回来,这样就能很精准的控制电机的转动,实现非常精准的定位。 一、伺服电机分类 1、直流伺服 结构简单控制容易。但从实际运行考虑,直流伺服电动机引入了机械换向装置,成本高,故障多,维护困难,经常因碳刷产生的火花影响生产,会产生电磁干扰。而且碳刷需要维护更换。机械换向器的换向能力,也限制了电动机的容量和速度。
2、交流伺服 分为永磁同步伺服电机和异步伺服电机。目前运动控制基本都用同步电机。 永磁同步伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。特点如下: 1、控制速度非常快,从启动到额定转速只需几毫秒;而相同情况下异步电机却需要几秒钟。 2、启动扭矩大,可以带动大惯量的物体进行运动。 ? 3、功率密度大,相同功率范围下相比异步电机可以把体积做得更小、重量做得更轻。 ? 4、运行效率高。 ? 5、可支持低速长时间运行。 ? 6、断电无自转现象,可快速控制停止动作。 7、控制和响应性能比异步伺服电机高很多。 二、伺服电机计算 2.1、电机转矩
伺服电机及选型
伺服电机 伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 “伺服”一词源于希腊语“奴隶”的意思,“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。因此伺服电机指的是随时跟随命令进行动作的一种电机,是以其工作性质命名的。 伺服主要靠脉冲来定位,伺服电机接收到一个脉冲就会旋转一个
脉冲对应的角度,从而实现位移。伺服本身带有编码器,具备发出脉冲的功能,所以伺服电机每旋转一个角度,就会发出对应数量的脉冲。等于是把电机旋转的详细信息反馈回去,形成闭环。这样的话,系统就会知道发了多少脉冲给电机,同时又收了多少脉冲回来,这样就能很精准的控制电机的转动,实现非常精准的定位。 一、伺服电机分类 1、直流伺服 结构简单控制容易。但从实际运行考虑,直流伺服电动机引入了机械换向装置,成本高,故障多,维护困难,经常因碳刷产生的火花影响生产,会产生电磁干扰。而且碳刷需要维护更换。机械换向器的换向能力,也限制了电动机的容量和速度。 2、交流伺服 分为永磁同步伺服电机和异步伺服电机。目前运动控制基本都用同步电机。 永磁同步伺服电机内部的转子是永磁铁,驱动器控制的U/V/W
三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。特点如下: 1、控制速度非常快,从启动到额定转速只需几毫秒;而相同情况下异步电机却需要几秒钟。 2、启动扭矩大,可以带动大惯量的物体进行运动。 3、功率密度大,相同功率范围下相比异步电机可以把体积做得更小、重量做得更轻。 4、运行效率高。 5、可支持低速长时间运行。 6、断电无自转现象,可快速控制停止动作。 7、控制和响应性能比异步伺服电机高很多。 二、伺服电机计算 2.1、电机转矩 电机转矩,简单的说,就是转动的力量的大小。也就是电机可以发出多大的力,转矩是一种力矩,力矩在物理中的定义是: 力矩= 力 ×力臂 这里的力臂就可以看成电机所带动的物体的转动半径。如果电机转矩太小,就带不动所要带的物体,也就是感觉电机的“劲”不够大。 假设我们是采用滚珠丝杆使工件做平行移动: 假设: 负载速度: s m v L /01.0= 检测物体质量: kg m j 5= 移动块质量: kg m z 25= 滚珠丝杆直径: m d B 02.0=
伺服电机的选型计算方法
伺服电机的选型计算方法
2012-4-17 10:51:00 来源:kingservo
1、
伺服电机和步进电机的性能比较
步进电机作为一种开环控制的系统, 和现代数字控制技术有着本质的联系。 在目前国 内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交 流伺服电机也越来越多地应用于数字控制系统中。 为了适应数字控制的发展趋势, 运动控 制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。 虽然两者在控制方 式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二 者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般 为 0.72 °、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如山洋公司 (SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为 1.8°、 0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合 式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以京伺服(KINGSERVO) 全数字式交流伺服电机为例,对于带标准 2500 线编码器的电机而言,由于驱动器内部采 用了四倍频技术,其脉冲当量为 360°/10000=0.036°。对于带 17 位编码器的电机而言, 驱动器每接收 131072 个脉冲电机转一圈,即其脉冲当量为 360°/131072=0.0027466°, 是步距角为 1.8°的步进电机的脉冲当量的 1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。 振动频率与负载情况和驱动器性能有关, 一 般认为振动频率为电机空载起跳频率的一半。 这种由步进电机的工作原理所决定的低频振 动现象对于机器的正常运转非常不利。 当步进电机工作在低速时, 一般应采用阻尼技术来 克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳, 即使在低速时也不会出现振动现象。 交流伺服系统具有 共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检 测出机械的共振点,便于系统调整。 三、矩频特性不同 步进电机的输出力矩随转速升高而下降, 且在较高转速时会急剧下降, 所以其最高工 作转速一般在 300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为 2000RPM 或 3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。 四、过载能力不同 步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以京伺服 (KINGSERVO)交流伺服系统为例, 它具有速度过载和转矩过载能力。 其最大转矩为额定转 矩的三倍, 可用于克服惯性负载在启动瞬间的惯性力矩。 步进电机因为没有这种过载能力, 在选型时为了克服这种惯性力矩, 往往需要选取较大转矩的电机, 而机器在正常工作期间 又不需要那么大的转矩,便出现了力矩浪费的现象。 五、运行性能不同
如何选择伺服电机控制方式
如何选择伺服电机控制方式? 如何选择伺服电机控制方式? 一般伺服电机都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。 速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。 就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。 换一种说法是: 1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
步进电机选型指南
步进电机选型指南 何为步进电机 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>