电动汽车电机选择与及设计
电动汽车
电动汽车电机选择与设计
学院:机械与车辆学院指导教师:
:
:
:
摘要:
介绍了轮毂电机相对于燃油汽车和单电机集中驱动系统的优势,比较了各种电动汽车用电机的基本性能,选择不同性能的电机满足现状电动汽车的性能、结构需要,并对电动汽车的动力驱动——轮毂电机、以及涉及动力模块上结构、功能上的设计。
关键词:电动汽车;驱动系统;轮毂电机
概述
全世界的汽车保有量和使用量的逐日增大,世界能源问题越来越突出,电动汽车方向逐渐出现并在汽车领域占有了一个非常重要的位置,由于传统汽车的技术成熟,人们对汽车的性能要求已经达到一个比较高的程度。在对于电动汽车普及方面上,这是一个很大的障碍。但是,新能源汽车的开发发展是必然的,应当冲破旧思想的束缚,大胆创新,将电动汽车的优势充分体现是如今比较重要的一步。
早在20世纪50年代初,美国人罗伯特就发明了一种将电动机、传动系统和制动系统融为一体的轮毂装置。该轮毂于1968年被通用电气公司应用在大型的矿用自卸车上。相对与传动汽车、单电机集中驱动的汽车,轮毂电机式电动汽车具有以下优点:
(1)动力控制通过电子线控技术实现对各电动轮进行无级变速控制,以及各电动轮之间的差速要求,省略了传统汽车所需的波箱、离合器、变速器、传动轴等;在电机所安装的位置同时可见,整车的结构变得简洁、紧凑,车身高降低,可利用空间大,传动效率高。
(2)容易实现各电动轮的电气制动、机电复合制动和制动能量回馈。
(3)底架结构大为简化,使整车总布置和车身造型设计的自由度增加。若能将底架承载功能与车身功能分离,则可实现相同底盘不同车身造型的产品多样化和系列化,从而缩短新车型的开发周期,降低开发成本。
(4)若在采用轮毂电机驱动系统的四轮电动汽车上导人线控四轮
转向技术(4WS),实现车辆转向行驶高性能化,可有效减小转向半径,甚至实现零转向半径,大大增加了转向灵便性。
1.电动汽车基本参数参数确定
1.1 该电动汽车基本参数要求,如下表:
参数
数值 参数 数值 整车正装质量(kg )
1200 滚动阻力系数f 0.014 最大总质量(kg ) 1400 轮胎半径(m ) 0.33 迎风面积(㎡)
2.50 传动效率 0.90 风阻系数
0.33 最高车速(km/h ) 100 最大爬坡度(%) 28
1.2 动力性指标如下:
(1)最大车速max 100a u km ≥;
(2)在车速a u =60km/h 时爬坡度i ≥5%(3度);
(3)在车速a u =40km/h 时爬坡度i ≥12% (6.8度);
(4)原地起步至100km/h 的加速时间35t s ≤;
(5)最大爬坡度i ≥12%(16度);
(5)0到75km/h 加速时间25t s ≤;
(6)具备2~3倍过载能力[7]。
2.电机参数设计
一般来说,电动汽车整车动力性能指标中最高车速对应的是持续工作区,即电动机的额定功率;而最大爬坡度和全力加速时间对应的是短时工作区(1~5min),即电动机的峰值功率。
2.1 以最高车速确定电机额定功率
根据虽高车速计算电机功率时,不考虑加速阻力和坡道阻力,电
机功率N P 应满足:
2max
max 360021.15a D a N T u C A u P m g f η????=???+ ??? (1)
20(1/19400)a f f u =+ (2)
式中:N P ——电机输出功率,kw ;
T η——传动系效率,取0.9;
m ——最大车重,取1400kg;
0f ——滚动摩擦系数,取0.014;
D C ——风阻系数,取0.33;
A ——迎风面积,取2.50㎡;
max a u ——最高车速,取100km/h 。
根据(1)(2)式,可以计算出满足最高车速时,电机输出额定功率为21.023kw[3]。
2.2 根据要求车速的爬坡度计算
()
sin 3600a f w N T u F F G P αη?++=(3)
根据公式(4),其中在车速a u =60km/h 时爬坡度i ≥5%可得: ()20.014160/1940014009.8cos 3227.4
f F =?+???= (N ) 2
0.33 2.560140.421.15w F ??==(N )
()140.4277.414009.80.0526020.9536000.9N P ++???==?(kw )
根据公式(4),其中在车速a u =40km/h 时爬坡度i ≥12%可得: ()20.014140/1940014009.8cos 12203.38f F =?+???= (N )
2
0.33 2.54062.4121.15w F ??==(N )
()62.41203.3814009.80.1184023.30736000.9N P ++???==?(kw )
根据(4)式,可以计算出满足车速为60km/h 时,爬坡度为5%,电机输出额定功率为20.95kw ,满足车速为40km/h 时,爬坡度为12%,电机输出额定功率为23.307kw[3][5]。
2.3 根据最大爬坡度确定电机的额定功率
根据公式(4),其中在车速a u =20km/h 时爬坡度i ≥28%(16度)可得:
()20.014120/1940014009.8cos 16188.395
f F =?+???= (N ) 2
0.33 2.52015.60221.15w F ??==(N )
()188.39515.60214009.80.2762024.63436000.9N P ++???==?(kw )
根据(4)式,可以计算出满足车速为20km/h 时,爬坡度为28%,电机输出额定功率为24.634kw ,在这里假定额定功率为25kw 。
2.4 根据额定功率来确定电机的最大功率
电机的最大功率可以由下式计算得出:
max N P P λ=? (4)
式中:max P ——电机最大功率,kw ;
λ——电机过载系数,一般取2~3。
根据式(3),可计算得max P =50~75kw ,所以初步假设电机的峰值功率为75kw 。由于选用的是轮毂电机,所以每个电机设定为:峰值
功率20kw ,额定功率为10kw[5]。
2.5 电机额定转速和转速的选择
对电机本身而言,额定功率相同的电机额定转速越高,体积越小,质量越轻,造价越低;而且电机功率恒定时,随着电机额定转速和最高转速的增加,电机的最大转矩会减小,从而避免造成转矩过太的不利影响。因此.选择高速电机是比较有利的。但当电机转速超过一定程度后,其转矩降低幅度明显减小.因此,电机最高转速过高时,将导致电机及减速装置的制造成本增加。电机转速的选择既要考虑负载的要求.又要考虑电机与传动机构的经济性等固素。综合上述各种因素,由于选用轮毂电机,根据车用驱动电机的特点井参考其他电动车辆上采用的电机,选定电机的额定转速为2000r/min ,最高转速为3000r/min 。
max max max 1955095509550N N N N N N T n T n P T n P P λ???==?=?(5)
式中:max T ——电机的最大转矩,N ·m ;
N T ——电机的额定转矩,N ·m ;
N n ——电机的额定转速,r/min 。
通过式(5),可算出电机的最大转矩为:max T =143.25N ·m ,额定转矩为:N T =47.75N ·m[1]。
3.传动系最大传动比的设计
(1)
0i 的选择首先应满足车辆最高行驶速度要求, 由最高车速max a u 与
电机最高转速max n 确定传动比的上限。
根据公式:
max 0max 0.377a n r
i u ≤ (6)
得:0i ≤3.732
(2)由电机的最高转速对应的最大输出转矩max T 和最高车速对应的行驶阻力max F 确定速比的下限值:
max 0max T F r i T η?≥? (7)
由前面的计算可得:max f w F F F =+=681.16(N )
最大输出转矩max T =143.25(N ·m )
max 0max 1.743T F r i T η?≥=?
(3)由电机最大输出转矩和最大爬坡度对应行驶阻力确定0i 。 根据公式:
max 0max T F r
i T αη?≥? (8)
max (sin )F G fcos ααα=+=203.997(N )
最大输出转矩max T =143.25(N ·m )
max 0max 0.522T F r i T αη?≥=?
由以上的计算我们选定一个合适的减速比0i =3.4[1]。
4.电机的种类与性能分析
4.1 直流电动机
有刷直流电动机的主要优点是控制简单、技术成熟。具有交流电机不可比拟的优良控制特性。在早期开发的电动汽车上多采用直流电动机,即使到现在,还有一些电动汽车上仍使用直流电动机来驱动。但由于存在电刷和机械换向器,不但限制了电机过载能力与速度的进一步提高,而且如果长时间运行,势必要经常维护和更换电刷和换向器。另外,由于损耗存在于转子上,使得散热困难,限制了电机转矩质量比的进一步提高。鉴于直流电动机存在以上缺陷,在新研制的电动汽车上已基本不采用直流电动机
4.2交流三相感应电动机
交流三相感应电动机的基本性能
交流三相感应电动机是应用得最广泛的电动机。其定子和转子采用硅钢片叠压而定子之间没有相互接触的滑环、换向器等部件。结构简单,运行可靠,经久耐用。交流感应电动机的功率覆盖面很宽广,转速达到12000~15000r/min。可采用空气冷却或液体冷却方式,冷却自由度高。对环境的适应性好,并能够实现再生反馈制动。与同样功率的直流电动机相比较,效率较高,质量减轻一半左右,价格便宜,维修方便。
4.3 永磁无刷直流电动机
永磁无刷直流电动机的基本性能
永磁无刷直流电动机是一种高性能的电动机。它的最大特点就是具有直流电动机的外特性而没有刷组成的机械接触结构。加之,它采用永磁体转子,没有励磁损耗:发热的电枢绕组又装在外面的定子上,散热容易,因此,永磁无刷直流电动机没有换向火花,没有无线电干扰,寿命长,运行可靠,维修简便。此外,它的转速不受机械换向的限制,如果采用空气轴承或磁悬浮轴承,可以在每分钟高达几十万转运行。永磁无刷直流电动机机系统相比具有更高的能量密度和更高的效率,在电动汽车中有着很好的应用前景。
永磁无刷直流电动机的不足
永磁无刷直流电动机受到永磁材料工艺的影响和限制,使得永磁无刷直流电动机的功率范围较小,最大功率仅几十千瓦。永磁材料在受到振动、高温和过载电流作用时,其导磁性能可能会下降或发生退磁现象,将降低永磁电动机的性能,严重时还会损坏电动机,在使用中必须严格控制,使其不发生过载。永磁无刷直流电动机在恒功率模式下,操纵复杂,需要一套复杂的控制系统,从而使得永磁无刷直流电动机的驱动系统造价很高
4.4 开关磁阻电动机
开关磁阻电动机的基本性能
开关磁阻电动机是一种新型电动机,该系统具有很多明显的特点:它的结构比其它任何一种电动机都要简单,在电动机的转子上没有滑环、绕组和永磁体等,只是在定子上有简单的集中绕组,绕组的端部较短,没有相间跨接线,维护修理容易。因而可靠性好,转速可达15000 r/min。效率可达85%~93%,比交流感应电动机要高。损耗主要在定子,电机易于冷却;转子元永磁体,调速范围宽,控制灵活,易于实现各种特殊要求的转矩一速度特性,而且在很广的范围内保持高效率。更加适合电动汽车动力性能要求。
开关磁阻电动机的不足
开关磁阻电动机的控制系统比其他电动机的控制系统复杂一些,位置检测器是开关磁阻电动机的关键器件,其性能对开关磁阻电动机的控制操作有重要影响。由于开关磁阻电动机为双凸极结构,不可避免地存在转矩波动,噪声是开关磁阻电动机最主要的缺点。但近年来的研究表明,采用合理的设计、制造和控制技术,开关磁阻电动机的噪声完全可以得到良好的抑制。另外,由于开关磁阻电动机输出转矩波动较大,功率变换器的直流电流波动也较大,所以在直流母线上需要装置一个很大的滤波电容器。
5.电机的选择
电动汽车采用的备种驱动电动机性能比较
电动汽车在不同的历史时期采用了不同的电动是采用了控制性能最好和成本较低的直流电动机。随着电机技术、机械制造技术、电力电子技术和自动控制技术的不断发展,交流电动机。永磁元刷直流电动机和开关磁阻电动机显示出比直流电动机更加优越的性能,在电动汽车上,这些电动机逐步取代了直流电动机。表1为现代电动汽车所采用的各种电动机的基本性能比较。目前交动机、永磁电动机和开关磁阻电动机以及它们的控制装置,成本还比较高,形成批量生产以后,这些电动机和单元控制装置的价格会迅速降低,将能够满足经济效益的要求,并使电动汽车整车价格降低[4]。
经比较,该车选用轮毂式电动轿车开关磁阻电机(专利号:201020193561),数量为4个,具体参数如下,表2:
表2 计算和最终确定电机参数
6.电机其他选择与设计
电机是纯电动车(EV )最为重要的部分之一,但由于轮毂所处的部位同时是比较恶劣的地方,所以轮毂电机的电动汽车设计中也需特殊设计。
6.1 电机形状位置设计
轮毂电机位于车轮,该车采用轮胎型号:215/65 R16;
则根据公式:自由半径
225.42H B in r ??+?= (9)错误!未找到
引用源。 汽车车轮的自由半径r=(215*65%*2+16*25.4)/2=0.343m
根据公式:滚动半径
2r Fd
r π= (10) 其中,F 为计算常数,子午轮胎F=3.05,d 为轮胎的自由直径。 所以车轮半径r r =(3.05×2r)/2π=0.333m 。
6.2 电机冷却设计
在传统电动机一般风冷便可以达到电机冷却效果,但是电动汽车的电机是整个汽车动力的来源,由上面数据可知轮毂电机最大功率可达20kw,所以,我选择水冷方式对轮毂电机冷却。
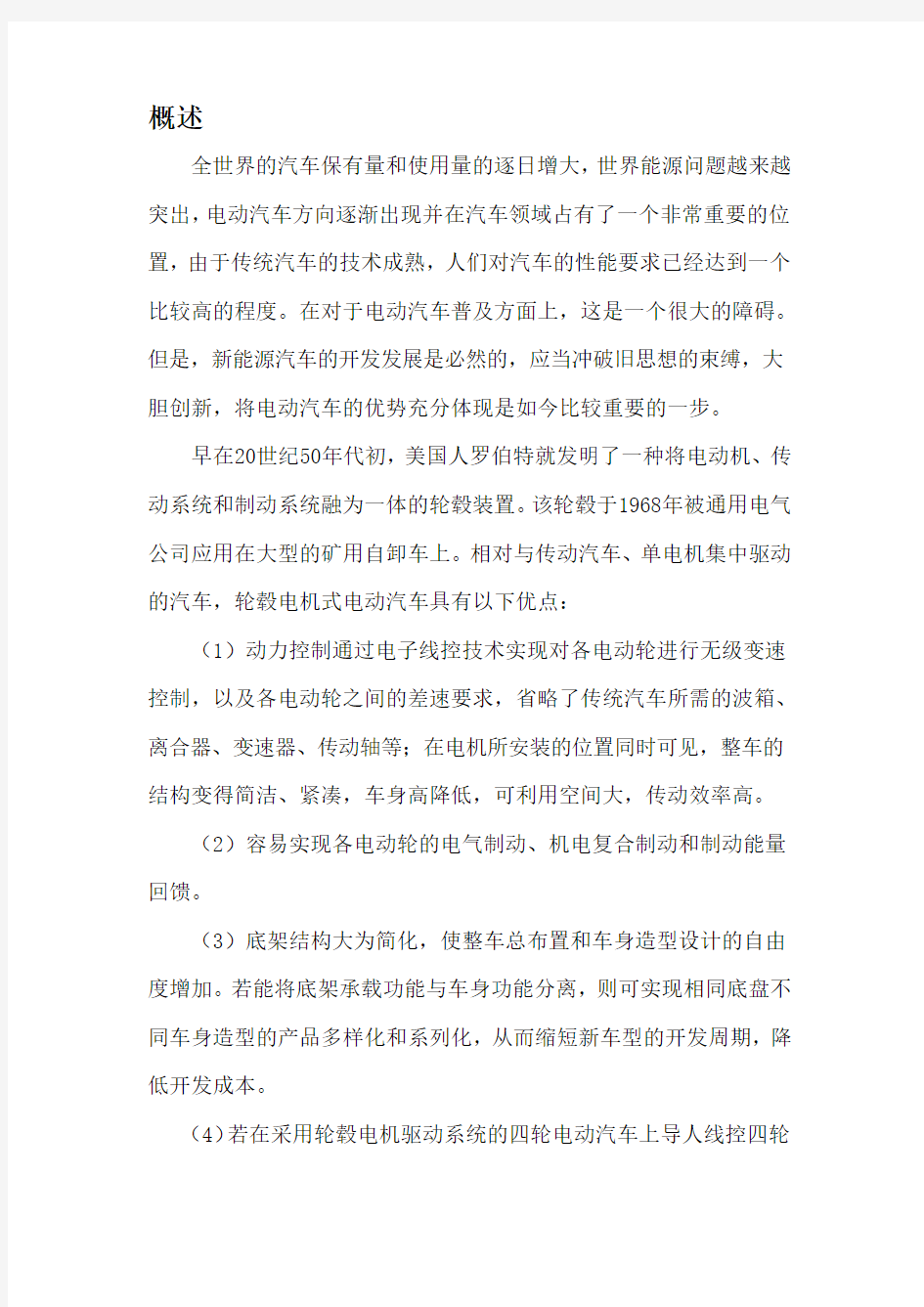
电机密封表面与水套连接,电机部分整体浸在冷却液中,电机发热大部位有凸出的散热片,电机旋转同时,散热片对冷却液压缩驱动,代替汽车水泵。原理图如下:
图1 轮毂电机水冷设计简图
本设计参考于专利:水冷电动轮毂,此发明包括左轮毂架、右轮毂架、箱体、外转子电机、轴、车轮和制动器,左轮毂架和右轮毂架与箱体相对固定连接,电机定子与轴之间的空腔内设置内冷却水箱,内冷却水箱固定设置在箱体内,电机定子紧密贴合固定套在内冷却水箱的外壳上;还包括外冷却水箱,外冷却水箱设置于电机外圆周,外冷却水箱和内冷却水箱之间通过至少一条通道连通,本发明利用冷却水的对流原理,能够有效散失电机运转产生的热量,并且在电机长时间运转时仍能有效散失热量,保证电机有较高的工作效率,从而节约能源,延长电机使用寿命;结构简单紧凑,并不增加电动轮毂的体积,适合于电动车辆轻便灵活的特点;外冷却水箱构成箱体壁,进一步简化本发明的结构。(专利号:200810069915)
7.总结与展望
7.1 总结
随着现在的世界能源短缺,电动汽车在汽车行业里的地位逐步占有不可忽视位置,而轮毂电机便是汽车的另一个改革方向。由于传统汽车的发展已达一个相当成熟的阶段,这里只能参考部分传统性能参数进行设计选择电动汽车的动力参数,经过计算得出电机的标准参数。
7.2 问题与展望
由于本人水平限制,论文仅由电机理论参数,设计选择出电机的最基本参数,在其中,我选择的开关磁阻电机也是比较新的技术,对
其数据仿真对比相对比较困难,也同时难以形成比较真实的仿真。未来应当将它放入电机测试平台进行功率、扭矩测试进行更近一步的数据仿真。此外,这里还涉及了电机的密封与散热问题,水套如何与电机进行更好的密封,以及抵抗外界碰撞、震动的能力需要进一步的测试设计。
最后,电动汽车是一个集机械设计、电控技术、电池技术为一体的复杂的、多样的系统工程。本文还有很多需要改进的地方和有待进一步研究的难点。相信电动汽车必定在新技术的开发下有个美好的前景。
参考文献
[1]陈伟.《电动汽车的动力学建模与仿真研究》.吉林大学,2003.
[2]李燕民,郜志峰.《电路与电子技术》.北京理工大学出版社(第
二版),2010.
[3]杨万福,余晨光.《汽车理论》.华南理工大学出版社,2010.
[4]褚文强,辜承林.《电动汽车用轮毂电机现状研究与发展趋势》.
华中科技大学,电气与电子工程学院,2007.
[5]杨金星,乔维高,刘宠誉.《电动汽车动力系统参数设计》.武汉
理工大学汽车工程学院,2009.
[6]王桂姣.《电动汽车轮毂电机驱动系统的运动特性与能量分配》.
武汉理工大学,2009.
[7]胡骅,宋慧.《电动汽车(第二版)》.人民交通出版社,2006.
电动汽车驱动电机的设计与选型
电动汽车驱动电机的设计与选型 全世界的汽车保有量和使用量的逐日增大,世界能源问题越来越突出,电动汽车方向逐渐出现并在汽车领域占有了一个非常重要的位置。早在20世纪50年代初,美国人罗伯特就发明了一种将电动机、传动系统和制动系统融为一体的轮毂装置。该轮毂于1968年被通用电气公司应用在大型的矿用自卸车上。 相对与传动汽车、单电机集中驱动的汽车,轮毂电机式电动汽车具有以下优点:动力控制通过电子线控技术实现对各电动轮进行无级变速控制,以及各电动轮之间的差速要求,省略了传统汽车所需的波箱、离合器、变速器、传动轴等;在电机所安装的位置同时可见,整车的结构变得简洁、紧凑,车身高降低,可利用空间大,传动效率高。容易实现各电动轮的电气制动、机电复合制动和制动能量回馈。底盘结构大为简化,使整车总布置和车身造型设计的自由度增加。若能将底盘承载功能与车身功能分离,则可实现相同底盘不同车身造型的产品多样化和系列化,从而缩短新车型的开发周期,降低开发成本。若在采用轮毂电机驱动系统的四轮电动汽车上导入线控四轮转向技术(4WS),实现车辆转向行驶高性能化,可有效减小转向半径,甚至实现零转向半径,大大增加了转向灵便性。(说起来很轻松,但是如果真正实现起
来,上面那段话恐怕十年之内都没办法产业化,比如机电复合制动,比如制动能量回馈,原理不难,难的是在技术、成本、产业、供应商等等条件都成熟起来之后......)1.电动汽车基本参数参数确定1.1 该电动汽车基本参数要求,如下表:1.2 动力性指标如下: 最大车速X;在车速=60km/h时爬坡度5%(3度);在车速=40km/h时爬坡度12% (6.8度);原地起步至100km/h的加速时间;最大爬坡度(16度);0到75km/h加速时间;具备2~3倍过载能力。2.电机参数设计一般来说,电动汽车整车动力性能指标中最高车速对应的是持续工作区,即电动机的额定功率;而最大爬坡度和全力加速时间对应的是短时工作区(1~5min),即电动机的峰值功率。2.1 以最高车速确定电机额定功率根据虽高车速计算电机功率时,不考虑加速阻力和坡道阻力,电机功率应满足:式中:电机输出功率,kw;传动系效率,取0.9;最大车重,取1400kg;滚动摩擦系数,取0.014;风阻系数,取0.33;迎风面积,取2.50㎡;最高车速,取100km/h。根据(1)(2)式,可以计算出满足最高车速时,电机输出额定功率为21.023kw[3]。2.2 根据要求车速的爬坡度计算 根据公式(4),其中在车速=60km/h时爬坡度5%可得:根据公式(4),其中在车速=40km/h时爬坡度12%可得: 根据(4)式,可以计算出满足车速为60km/h时,爬坡度为
电动汽车电机的类型及其特点
电动汽车电机的类型及其特点 发布时间:2015-8-5 16:38:34 由于电动汽车的环保、节能、轻便的特性,使得电动汽车越来越受到各个 国家的重视。目前,电动汽车处于高速发展的阶段,作为电动汽车核心部件的 电动汽车电机主要有直流电动机、交流三相感应电动机、永磁无刷直流电动机、开关磁阻电动机等。 一有刷直流电动机 有刷直流电动机的主要优点是控制简单、技术成熟。具有交流电机不可比 拟的优良控制特性。在早期开发的电动汽车上都采用直流电动机,即使到现在,还有一些电动汽车上仍使用直流电动机来驱动。但由于存在电刷和机械换向器,不但限制了电机过载能力与速度的进一步提高,而且如果长时间运行,势必要 经常维护和更换电刷和换向器。另外,由于损耗存在于转子上,使得散热困难,限制了电机转矩质量比的进一步提高。鉴于直流电动机存在以上缺陷,在新研 制的电动汽车上已基本不采用直流电动机。 二交流三相感应电动机 交流三相感应电动机是应用得最广泛的电动机。其定子和转子采用硅钢片 叠压而定子之间没有相互接触的滑环、换向器等部件。结构简单,运行可靠, 经久耐用。交流感应电动机的功率覆盖面很宽广,转速达到12000~15000r/min。可采用空气冷却或液体冷却方式,冷却自由度高。对环境的适应性好,并能够 实现再生反馈制动。与同样功率的直流电动机相比较,效率较高,质量减轻一 半左右,价格便宜,维修方便。 三永磁无刷直流电动机 永磁无刷直流电动机是一种高性能的电动机。它的最大特点就是具有直流 电动机的外特性而没有刷组成的机械接触结构。加之,它采用永磁体转子,没 有励磁损耗:发热的电枢绕组又装在外面的定子上,散热容易,因此,永磁无 刷直流电动机没有换向火花,没有无线电干扰,寿命长,运行可靠,维修简便。此外,它的转速不受机械换向的限制,如果采用空气轴承或磁悬浮轴承,可以 在每分钟高达几十万转运行。永磁无刷直流电动机机系统相比具有更高的能量 密度和更高的效率,在电动汽车中有着很好的应用前景。 四开关磁阻电动机 开关磁阻电动机是一种新型电动机,该系统具有很多明显的特点:它的结 构比其它任何一种电动机都要简单,在电动机的转子上没有滑环、绕组和永磁 体等,只是在定子上有简单的集中绕组,绕组的端部较短,没有相间跨接线, 维护修理容易。因而可靠性好,转速可达15000 r/min。效率可达85%~93%,
电动汽车驱动电机匹配设计.
电动汽车驱动电机匹配设计 目录 1 概述 (1) 2 世界电动汽车发展史 (2) 3 电驱动系统的基本要求 (5) 3.1电驱动系统结构 (5) 3.2电机的基本性能要求 (6) 4 电动汽车基本参数参数确定 (7) 4.1电动汽车基本参数要求 (7) 4.2 动力性指标 (7) 5 电机参数设计 (7) 5.1 以最高车速确定电机额定功率 (7) 5.2 根据要求车速的爬坡度计算 (8) 5.3 根据最大爬坡度确定电机的额定功率 (9) 5.4 根据额定功率来确定电机的最大功率 (9) 5.5 电机额定转速和转速的选择 (9) 6 传动系最大传动比的设计 (10) 7 电机的种类与性能分析 (11) 7.1 直流电动机 (11) 7.2交流三相感应电动机 (11)
7.3 永磁无刷直流电动机 (11) 7.4 开关磁阻电动机 (12) 8 电机的选择 (13) 9 电机其他选择与设计 (15) 9.1 电机形状位置设计 (15) 9.2 电机冷却设计 (15) 10 总结与展望 (17) 10.1 总结 (17) 10.2 问题与展望 (17) 致谢 (18) 参考文献 (19) 1.概述 汽车工业在促进世界经济飞速发展和给人们生活提供便利的同时,又展现出了其双刃剑的另一面,它将能源与环境问题推到了日益尴尬的处境。“能源、环境和安全”成为了21世纪世界汽车工业发展的3大主题。其中,能源与环境问题作为全球面临的重大挑战和制约汽车工业可持续发展的症结所在,更成为重中之重。电动汽车使用电能作为动力能源,而电能具有来源广、清洁无污染等特点。电动汽车被公认为21世纪重要的交通工具。 电动汽车是指汽车行驶的动力全部或部分来自电机驱动系统的汽车,它主要以动力电池组为车载能量源,是涉及机械、电子、电力、微机控制等多学科的高科技技术产品。按照汽车行驶动力来源的不同,一般将电动汽车划分为纯电动汽车(Pure Electric Vehicle,PEV)、混合动力电动汽车(Hybrid Electric Vehicle,HEV)、插电式混合动力电动汽车(Plug-in Hybrid Electric Vehicle,PHEV)和燃料电池电动汽车(Fuel Cell Electric Vehicle,FCEV)4种基本类型。 自1881年法国电气工程师Gustave Trouve制造出首辆电动汽车开始,电动汽车经历了曲折起伏的几个发展阶段,其中的决定因素就是动力电池技术和人们
电动车电机及电池选型计算
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 2、关于CV11整车参数 3、轮边电机选型计算 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,
风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩 电机的基数、额定转矩
电机符合基速以下恒转矩,基速以上恒功率,因此在基速时,电机有最大功率和最大转矩。根据以下公式: 经过计算,取额定转速为250rpm,额定转矩为124Nm。 综合以上理论计算,根据设计目标确定的需求电机参数(经减速器后)如下表所示: 4、动力电池选型计算 纯电动汽车在行驶过程中的能量完全来自于动力电池组,动力电池组的容量越大,汽车的续驶里程就越长,但是相应的电池组的体积和重量也越大。 首先电池组总电压需要达到电机控制器的电压等级,一般为电机控制器的额定工作电压,因此动力电池组总电压暂取48V。 其次根据设计目标中以30Km/h行驶的续驶里程为120Km来计算匀速行驶所需的能量。匀速行驶时纯电动汽车的需求功率为: 式中,速度为30Km/h,计算得到功率为,那么四个电机所需总功率为。因为以30Km/h 行驶120Km需要用时4h,考虑到电池组放电效率为,而放电深度为80%,因此电池总能量为。 根据电池总能量可以求出电池容量,由公式: 得到,C=302Ah,汽车在实际行驶中,有加速以及爬坡情况,而在这两种工况下转矩增大,需要很大的放电电流,因此耗能比匀速行驶时要多,由上述理论计算结合实际的电池供应商的情况,最终选择。
电动汽车电机全参数确定
电动汽车技术
一、驱动电机参数确定 (1)最高车速时计算驱动电机功率 电机的功率必须能满足电动轿车最高车速的要求,以保证在良好的路面或空载情况下,能以较高的车速行驶. 最大车速时所需功率: 2D a 1cos 21.153600a MaxV V C A P Gf V ??=++ ???η=24.7(KW ) m=2600kg ;Va=90 km/h ;f=0.016; C D =0.5;η=0.95;B=1.46m ;H=1.87m; (2)加速性能计算驱动电机功率。 保证在良好的路面或空载情况下,整车加速过程的末时刻为电动
汽车输出最大功率,加速过程所需最大功率: = 25.6(kw ) (3)最大爬坡度时计算驱动电机功率 在计算最大爬坡度时的电机功率时,应忽略加速阻力功率 爬坡过程所需最大功率: =32.84(kw) 根据以上各式计算得出发动机在不同工况下的扭矩和驱动力: P=Tn/9549 (1) n=(Va ×i 0)/(0.337×r) (2) 联立上面两个方程可得 MaxV T =70Nm, Ft=890N MaxJ T =408Nm, Ft=5.9kN MaxGra T =650Nm, Ft=8.1kN 由此可得根据(1)计算可知选定电机的额定功率为30kw , 由(2)(3)可知选定电机的峰值功率为60kw,最大扭矩为650Nm 二、电池组电压、容量的确定 在选择了电机类型以后,就要确定电池的参数。在一定的电机功率136003600a a MaxGra t mgfu mgiu P ??=+ ???η
下,电压越高,电流就越低,线路功率损失就越小,在电池以小电流放电时,可发挥出较大的容盈。 根据0.15kWh/km×150km=22.5kWh即所需电池的容量为22.5kWh,考虑到其它电气设备,选择电池容量为25kwh。 锂电单体的容量为270Wh,铅酸电池单体的容量为1.44kWh;若选锂电池则需要92个单体,若选铅酸电池则需要18个单体三、采用Matlab计算绘制驱动力和行驶阻力图 clear;clf; axis([0, 250, 0, 12000]); ig=1; i0=4.1; r=0.325; G=26000; f=0.016; Cd=0.5; A=2.73; Pmax=60; Torque=650; v=0:26.35; Fw =(f*G+Cd*A*(v.^2))./21.15; F=v*0+(Torque*ig*i0)./r; hold on
电动汽车电机选择与及设计
电动汽车 电动汽车电机选择与设计 学院:机械与车辆学院指导教师: : : : 摘要: 介绍了轮毂电机相对于燃油汽车和单电机集中驱动系统的优势,比较了各种电动汽车用电机的基本性能,选择不同性能的电机满足现状电动汽车的性能、结构需要,并对电动汽车的动力驱动——轮毂电机、以及涉及动力模块上结构、功能上的设计。 关键词:电动汽车;驱动系统;轮毂电机
概述 全世界的汽车保有量和使用量的逐日增大,世界能源问题越来越突出,电动汽车方向逐渐出现并在汽车领域占有了一个非常重要的位置,由于传统汽车的技术成熟,人们对汽车的性能要求已经达到一个比较高的程度。在对于电动汽车普及方面上,这是一个很大的障碍。但是,新能源汽车的开发发展是必然的,应当冲破旧思想的束缚,大胆创新,将电动汽车的优势充分体现是如今比较重要的一步。 早在20世纪50年代初,美国人罗伯特就发明了一种将电动机、传动系统和制动系统融为一体的轮毂装置。该轮毂于1968年被通用电气公司应用在大型的矿用自卸车上。相对与传动汽车、单电机集中驱动的汽车,轮毂电机式电动汽车具有以下优点: (1)动力控制通过电子线控技术实现对各电动轮进行无级变速控制,以及各电动轮之间的差速要求,省略了传统汽车所需的波箱、离合器、变速器、传动轴等;在电机所安装的位置同时可见,整车的结构变得简洁、紧凑,车身高降低,可利用空间大,传动效率高。 (2)容易实现各电动轮的电气制动、机电复合制动和制动能量回馈。 (3)底架结构大为简化,使整车总布置和车身造型设计的自由度增加。若能将底架承载功能与车身功能分离,则可实现相同底盘不同车身造型的产品多样化和系列化,从而缩短新车型的开发周期,降低开发成本。 (4)若在采用轮毂电机驱动系统的四轮电动汽车上导人线控四轮
纯电动汽车动力总成参数的选择1
基于昌河爱迪尔CH7101BE开发的 纯电动汽车的电机和蓄电池等相关参数的确定计 算书 1 说明 本纯电动汽车拟在昌河爱迪尔CH7101BE原有底盘和车身的基础上进行开发,拟设计最高车速为120km/h,一次充电的续驶里程 为160km(60km/h均速行驶), 2 纯电动汽车采用的电驱动结构形式 采用由单驱动电机、单级固定速比的主减速器及差速器三者组成该车的前置电力驱动系统,如图1所示。车速/转矩的控制直接由电机控制器来实现。 图1 纯电动汽车的电驱动结构布置形式 M-为驱动电机,FG-单级固定速比的主减速器,D-差速器 3 电动机功率的确定 纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、加速能力以及最大爬坡度的要求。 3.1满足最高车速电机所需提供的功率 当汽车以最高车速Vmax匀速行驶时,电动机所提供功率(kw)至少为: 式中: η—整车动力传动系统效率(包括主减速器和驱动电机及控制器的工作效率),主减速器的取0.9,驱动电机及控制器取0.88,则 η=0.9*0.88=0.792; m—汽车的总质量,取1360(原车总质量)+250(6个12V的蓄电池的质
量)=1610kg; g—重力加速度,取9.8m/s2; f—滚动阻力系数,取0.015; C d—空气阻力系数,取0.35; A—电动汽车的迎风面积,取1.6*1.67=2.672m2(原车宽*车身高); Vmax—最高车速,取120km/h。 代入对应的数据后,求得电动机至少所需提供的功率(kw),即 3.2 满足加速性能电机所需提供的功率 根据即将颁布的国家标准《纯电动乘用车技术条件》的规定加速性能以计算电机所需提供的功率,即按照GB/T规定的试验方法测量车辆0~50km/h和50km/h~80km/h的加速性能,其加速时间不应超过10s和 15s。 在水平良好沥青或水泥路面上,车辆由车速V1(km/h)加速到车速 V2(km/h)的加速时间T(s)计算式为: 式中: F t—车辆行驶驱动力(N); F w—车辆行驶空气阻力(N); F f—车辆行驶滚动阻力(N); δ—旋动质量换算系数,取1.1,对纯电动汽车其计算式为: 式中: I w—车轮的总转动惯量(kg.m2); I m—与电机输出轴相连接的所有转动部件的转动惯量之和 (kg.m2); i g—变速器速比; i0—主减速器速比;
电动车电机及电池选型计算
电动车电机及电池选型 计算 文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
C V11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 2、关于CV11整车参数 3、轮边电机选型计算 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率
其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;tm为起步加速过程的时间(s);Vm为起步加速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩 电机的基数、额定转矩 电机符合基速以下恒转矩,基速以上恒功率,因此在基速时,电机有最大功率和最大转矩。根据以下公式: 经过计算,取额定转速为250rpm,额定转矩为124Nm。
纯电动汽车电动机&电池匹配参数
电动机&电池匹配 ? 整车参数: 整车自重(带电池):700KG (TBD ) 额定载荷: 300KG (4个人) 车辆滚动半径: 0.247mm ? 计算变速器速比和车速: 无变速箱,无差速器,根据产品定义设计最高车速:80KM/H ,计算电动机最高转速需求: 0.377 0.3770.24780/859/a rn u n km h i n r m ==?== 取满载时最高车速为40KM/H 0.2470.377 40/1 a r u km h == 则430/n r m = ? 计算满载在正常道路上行驶时所需要的扭矩: 初步确定传动效率为0.92,空气阻力系数为0.35、轮胎滚动阻力系数为0.015、迎风面 积2 1.66m 2 21.15M CdA Gf u r η=+ 20.920.35 2.2 8409.80.015800.24721.15M ??=??+? 95.7M Nm = ? 计算在正常道路上行驶时所需要的功率: 3max max 1 ( )360076140e a a Gf CdA P u u η=+ 3 17009.80.020.35 2.2(8080) 5.70.92360076140 e P Kw ???= ?+= ? 选择电动机 根据车辆的安装空间以及市场上的电动机的情况,选择电动机额定电压为72V ;根据车辆用 设车辆最大行驶里程为80KM ,电池放电深度为0.8: 0.8e S P UI V ?=? 82.3I A = 800.88082.3 W S Vt km ==??= 102.875W Ah = 所以选择110Ah 电池
5.9车轮总成 5.9.1 车轮总成的结构:车轮:145/70R12轮胎 5.9.2车轮总成的性能要求 5.9.2.1车轮总成应有合理的负荷能力和速度能力 5.9.2.2轮胎应有良好的附着性能和缓冲性能 5.9.2.3同时考虑铝合金和钢车轮 5.9.2.4具有良好的均匀性和质量平衡性。车轮总成在轮毂边缘上总的动不平衡量不大于80g,每一轮毂边缘单侧只用一块平衡块。 5.9.2.5车轮总成应有较小的滚动阻力和行驶噪声。 5.9.2.6车轮装饰盖与车轮搭配合理。 5.9.2.7无备胎 5.10 电气 5.10.1蓄电池 5.10.1.1免维护式,容量:210A·h 5.10.1.2要求安装位置接近性好、固定可靠 5.10.3.1 组合仪表包括指针式车速表、里程表、指针式电动机转速表、电压表、水温表等。 5.10.3.2组合仪表设有:点亮报警灯、充电指示灯、制动报警灯、转向指示灯、远光指示灯、前雾灯指示灯、防盗报警灯等。 5.10.3.3仪表台灯光应柔和、明亮、可调。 5.10.4喇叭 5.10.4.1单无触点电喇叭。 5.10.5车灯 5.10.5.1整车车外设定前照灯、前/后位置灯、前后转向灯、制动灯、倒车灯、前雾灯、后雾灯(选装)、牌照灯、回复反射器。
电动汽车用驱动电机系统的现状及发展趋势
电动汽车用驱动电机系统的现状及发展趋势 中国汽车技术研究中心窦汝振李磊宋建锋 摘要:介绍了我国电动汽车用驱动电机系统的研发现状,以及车用系统与普通工业用系统间的差异,指出了发展趋势。 1 引言 我国汽车工业的发展面临着来自能源安全、环境保护和气候变化等可持续发展要求的多重挑战。随着近几年汽车保有量的快速增加,汽车能源消耗增长呈现加速趋势,进一步加剧了我国石油供需矛盾。在当前石油资源日益紧张,价格不断攀升的国际形势下,发展电动汽车特别是混合动力汽车是缓解我国石油资源短缺现状的有效途径,也是增强我国汽车工业核心竞争力的重大战略举措。 经过“八五”、“九五”规划的实施,特别是“十五”国家863电动汽车重大专项,我国已实现了官、产、学、研的资源整合,具有了电动汽车用驱动电机系统自主研发能力。在国家“三纵三横”总体布局中(如附图所示),驱动电机及其控制系统被列为“三横”中的共性技术之一。 附图国家“十五”电动汽车重大专项布局示意 2 电动汽车用驱动电机系统的特点及分类 电动汽车对驱动电机系统的要求至少包括: (1)基速以下输出大转矩,以适应车辆的启动、加速、负荷爬坡、频繁起停等复杂工况; (2)基速以上为恒功率运行,以适应最高车速、超车等要求; (3)全转速运行范围内的效率最优化,以提高车辆的续驶里程; (4)结构坚固、体积小、重量轻、良好的环境适应性和高可靠性; (5)低成本及大批量生产能力。 电动汽车最早采用了直流电机系统,特点是成本低、控制简单,但重量大,需要定期维护。随电力电子技术、自动控制技术、计算机控制技术的发展,包括异步电机及永磁电机在内的交流电机系统体现出比直流电机系统更加优越的性能,目前已逐步取代了直流电机控制系统。特别是借助于设计方法、开发工具及永磁材料的不断进步,用于驱动的永磁同步电动机得到了飞速发展。 电动汽车中常用的交流电机主要有异步、永磁、开关磁阻三大类型,其特点如表1所示。
高速电动车电机参数的确定
高速电动车电机参数的确定 一、功率计算 2max max 1()360021.15 d N T C Au P mgf u =?+η N P —电机额定功(kW ) ; T η—传动系效率0.90 ~ 0.92; m — 最大总质量(kg ); f —滚动摩擦系数,良好沥青路面0.010~0.018,一般沥青与水泥路面0.018~0.020; Cd — 风阻系数,电动车Cd = 1~1.5; A —迎风面积(m 2),电动车A =1~1.3; u max — 最高车速(km / h ) 经计算得需要0.85千瓦的电机 二、 以最大爬坡度电动车电机转矩 2max cos sin 21.15 d t r C Au F F mgf mgf ==++αα t F — 电动车驱动力(N ) ; r F —电动车行驶阻力(N ) ; u —上坡时速度(km / h ) tan 15%,8.53,cos 0.99,sin 0.15α=α=α=α= 360.23N 车轮半径0.25m 半轴扭矩=360.23×0.25=90Nm 电机最高速4000转/分,基速1000转/分,调速比=4 半轴转速=318.3转/分 电机减速箱减速比 4000/318.3=12.6 取12 需要电机输出扭矩=7.5nm 电机额定功率=0.785kw 0.9kW 电机可以满足正常行驶和15% 、20km/h 的爬坡要求。
三、续驶里程 续驶里程=M I T 3600V C F ??????∑ηηηλ V 为电池电压(V ) C 为电池容量(Ah ) M I T 、、、ηηη分别为电机、逆变器、传动系统效率 λ为放电深度 续驶里程= 3206036000.920.950.950.9165kM 3301000 ??????=?(按60km/h 匀速) 60km/h 等速行驶的功率=6.1kw 匀速行驶放电电流= 6.11000=19A 320 ? 放电时间=C 600.9==2.84I 19? 续驶里程=60×2.84=170kM
电动汽车轮毂电机参数
电动汽车轮毂电机参数 由于能源问题和环境问题的日益突出,各国和各大汽车厂商不得不寻找传统燃油汽车的替代品。电动汽车具有能量利用率高、对环境污染小等优点,被视为未来重要的交通工具之一。 对轮毂电机驱动方式的电动汽车而言,电机控制策略效果将直接影响整车控制性能的好坏。而驱动电机控制策略的设计又与电机的机械参数(转动惯量)和电气参数(电阻、电感和磁链)息息相关,因此在线辨识这些参数对提高电动汽车的整体控制效果具有重大意义。 机性能试验台,包括轮毂电机控制系统、试验台架和测量与控制系统三部分,通过调节电机的输入量和负载转矩,不仅能测量轮毂电机的基本参数,如输入电压/电流,输入功率,电机转速,输出转矩等,还能对电机进行各种试验,如空载试验、加载试验、效率试验等,全面检测轮毂电机的性能,为轮毂电机的设计和优化提供数据支持。 轮毂电机使用时可分为减速驱动和直接驱动两种驱动方式。 ①采用减速驱动方式,电动车电机一般在高速下运行,选用高速内转子式电
机。减速机构放置在电机和车轮之间,起到减速和增加转矩的作用。减速驱动具有如下优点:电机运行在高速下,具有较高的效率,转矩大,爬坡性能好,能保证汽车在低速运行时获得较大的平稳转矩。 不足之处是:难以实现液态润滑,齿轮磨损严重,使用寿命短,不易散热,噪声大。减速驱动方式适合于丘陵或山区使用,以及要求过载能力大和城区客车等需要频繁起动/停车等场合。 ②采用直接驱动方式,多采用外转子式电机。为了使汽车能顺利起步,要求电机在低速时能提供大的转矩。直接驱动的优点有:不需要减速机构,使得整个驱动结构更加简单、紧凑,轴向尺寸也较小,而且效率也进一步提高,响应速度也较快。 其缺点是:起步、爬坡以及承载较大载荷时需要大电流,易损坏电池,电机效率峰值区域小。直接驱动方式适合平路或负荷较小的场合。
关于电动车电机及电池选型计算
关于电动车电机及电池选 型计算 This manuscript was revised on November 28, 2020
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加 速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩
电动汽车用永磁同步电机浅析
电动汽车用永磁同步电机浅析 摘要:本文首先介绍了目前常用的电动机类型;然后着重介绍电动汽车用永磁同步电机在设计制造过程中可能会遇到的关键技术问题,还介绍了一些目前应用比较广泛的永磁同步电机的控制策略。 关键词:电动汽车;永磁同步电机;关键技术;控制策略 Superficial Analysis of Permanent Magnet Synchronous Motor in Electric Vehicle Abstract:The article first introduces the type of motors used commonly now,then introduce the key technology problem in the design and manufacture of permanent magnet synchronous motors,and also describes some control strategies of the permanent magnet synchronous motors. Key words:electric vehicle; permanent magnet synchronous motor;key technology;control strategy 0引言 当今环保和能源问题备受关注,为解决这些问题,电动汽车呈现加速发展的趋势;同时电动汽车容易实现智能化,有助于改进和提高车辆的安全和使用性能。电动汽车对其驱动系统的要求是转矩控制能力良好,转矩密度高,运行可靠性及在整个调速范围内的效率尽可能高,从而保证车辆具有良好的动力性能和操控性,同时在车载动力电池未能取得突破的情况下,延长车辆的续驶里程。研究并开发出高水平的电机驱动控制系统,对提高我国电动汽车驱动系统水平及电动汽车的产业化具有重要意义[1]。 随着永磁材料性能的提高和成本的降低,永磁同步电动机以其高效率、高功率因数和高功率密度等优点,正逐渐成为电动汽车驱动系统的主流电机之一。 1概述 永磁电动机既具有交流电动机的无电刷结构、运行可靠等优点,又具有直流电动机的调速性能好的优点,且无需励磁绕组,可以做到体积小、控制效率高,是当前电动汽车电动机研发与应用的热点。永磁电动机驱动系统可以分为无刷直流电动机(BLD-CM)系统和永磁同步电动机(PMSM)系统[2]。永磁同步电动机(PMSM)系统具有高控制精度、高转矩密度、良好的转矩平稳性以及低噪声的特点,通过合理设计永磁磁路结构能获得较高的弱磁性能,提高电动机的调速范围,因此在电动汽车驱动
关于电动车电机及电池选型计算
关于电动车电机及电池 选型计算 标准化管理部编码-[99968T-6889628-J68568-1689N]
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加 速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩
电动汽车电机控制器原理
电动汽车电机控制器 一、电机控制器的概述 根据GB/T 18488.1-2001《电动汽车用电机及其控制器技术条件》对电机控制器的定义,电机控制器就是控制主牵引电源与电机之间能量传输的装置、是由外界控制信号接口电路、电机控制电路和驱动电路组成。 电机、驱动器和电机控制器作为电动汽车的主要部件,在电动汽车整车系统中起着非常重要的作用,其相关领域的研究具有重要的理论意义和现实意义。 二、电机控制器的原理 图1汽车电机控制器原理图 电机控制器作为整个制动系统的控制中心,它由逆变器和控制器两部分组成。逆变器接收电池输送过来的直流电电能,逆变成三相交流电给汽车电机提供电源。控制器接受电机转速等信号反馈到仪表,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。 三、电机控制器的分类 1、直流电机驱动系统 电机控制器一般采用脉宽调制(PWM)斩波控制方式,控制技术简单、成熟、成本低,但效率低、体积大等缺点。 2、交流感应电机驱动系统 电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速,采用矢量控制或直接转矩控制策略实现电机转矩控制的快速响应。
3、交流永磁电机驱动系统 包括正弦波永磁同步电机驱动系统和梯形波无刷直流电机驱动系统,其中正弦波永磁同步电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速;梯形波无刷直流电机控制通常采用“弱磁调速”方式实现电机的控制。由于正弦波永磁同步电机驱动系统低速转矩脉动小且高速恒功率区调速更稳定,因此比梯形波无刷直流电机驰动系统具有更好的应用前景。 4、开关磁阻电机驱动系统 开关磁阻电机驱动系统的电机控制一般采用模糊滑模控制方法。目前纯电动汽车所用电机均为永磁同步电机,交流永磁电机采用稀土永磁体励磁,与感应电机相比不需要励磁电路,具有效率高、功率密度大、控制精度高、转矩脉动小等特点。 四、电动控制器的相关术语 1、额定功率:在额定条件下的输出功率。 2、峰值功率:在规定的持续时间内,电机允许的最大输出功率。 3、额定转速:额定功率下电机的转速。 4、最高工作转速:相应于电动汽车最高设计车速的电机转速。 5、额定转矩:电机在额定功率和额定转速下的输出转矩。 6、峰值转矩:电机在规定的持续时间内允许输出的最大转矩。 7、电机及控制器整体效率:电机转轴输出功率除以控制器输入功率再乘以100%。 扩展阅读: WP4000变频功率分析仪应用于电动汽车电机试验 现行的电动汽车相关标准大全 如何选择电动汽车电池监测系统 hb
电动汽车用电机可行性报告
1.我国电动汽车发展概况 1.1 产业背景 1.2 产业政策 1.3 发展状况 1.3.1 技术状况 1.3.2 产业化状况 1.3.3 产品状况 1.3.4 国内主要生产企业及其产品明细表 1.4 发展方向 1.4.1 未来趋势 1.4.2 专家评述 2.我国发展电动汽车的相关政策 2.1 国家发展电动汽车的相关政策(按出台时间、名称、主要内容列表) 2.2 各省市发展电动汽车的相关政策(对北京、山东、湖南、湖北、河南、安徽、天津等分述之) 2.3 电动汽车技术支持的相关单位与组织 3.电动汽车驱动系统与驱动电机 3.1 电动汽车对其驱动系统的主要技术要求 3.2 电动汽车驱动系统的分类及其说明 3.3 电动汽车驱动电机的分类及其技术指标汇总 3.4 国内电动汽车研发单位及其研发情况 3.5 电动汽车驱动电机发展方向 4.技术方案 4.1 永磁一磁阻同步电机先进性与可行性 4.2 永磁一磁阻同步电机的优越性 4.3 永磁一磁阻同步电机现有工作基础 5.技术路线 6.合作组织 7.投资估算 8.其他
国外电动汽车及其驱动系统(本网页可阅览) 1.电动汽车的技术特征 1.1 电动汽车的基本概念和基本分类 电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。它使用存储在电池中的电来发动。电动汽车主要有纯电动汽车、混合动力电动汽车和燃料电池电动汽车3种类型. 纯电动汽车 纯电动汽车是完全由二次电池(如铅酸电池、镍镉电池、镍氢电池或锂离子电池等)提供动力的汽车。 混合动力电动汽车 一般是指采用内燃机和电动机两种动力,将内燃机与储能器件(如高性能电池或超级电容器) 通过先进控制系统相结合, 提供车辆行驶所需要的动力, 混合动力电动汽车并未从根本上摆脱交通运输对石油资源的依赖。因此,混合动力电动汽车是电动汽车发展过程中的一种过渡车型。 燃料电池车 燃料电池车是利用氢气和氧气(或空气)在催化剂的作用下直接经电化学反应产生电能的装臵, 具有完全无污染(排放物为水)的优点, 1.2电动车的基本特点 概括来讲, 电动汽车与内燃机汽车相比有以下优点 (1)效率高:对能源的利用,电动汽车的总效率至少在19%以上(采用燃料电池时效率远高于这一数值),而内燃机汽车效率低于12%,由此可见, 电动汽车更加节能。 (2)环境污染小: 电动汽车排出的废气非常少甚至不排出废气, 产生的废热也明显少于内燃机汽车. (3)可使用多种能源: 可直接利用电厂输出的电能,也可以通过太阳能、化学能、机械能转化而获得电能。 (4)噪音低: 即使靠近正在高速运转的电动机也不会感觉到让人不舒服的噪音, 而内燃机的噪音则非常大。 (5)结构简单,使用维修方便,操作控制易实现自动化。 三种类型电动汽车的比较如附表所示
电动汽车电机选择与设计
电动汽车 电动汽车 电动汽车电机选择与设计 学院:机械与车辆学院指导教师: 专业:时间:2011.5.23-27 中国·珠海
电动汽车电机选择与设计 摘要:介绍了轮毂电机相对于燃油汽车和单电机集中驱动系统的优势,比较了各种电动汽车用电机的基本性能,选择不同性能的电机满足现状电动汽车的性能、结构需要,并对电动汽车的动力驱动——轮毂电机、以及涉及动力模块上结构、功能上的设计。 关键词:电动汽车;驱动系统;轮毂电机 概述 全世界的汽车保有量和使用量的逐日增大,世界能源问题越来越突出,电动汽车方向逐渐出现并在汽车领域占有了一个非常重要的位置,由于传统汽车的技术成熟,人们对汽车的性能要求已经达到一个比较高的程度。在对于电动汽车普及方面上,这是一个很大的障碍。但是,新能源汽车的开发发展是必然的,应当冲破旧思想的束缚,大胆创新,将电动汽车的优势充分体现是如今比较重要的一步。 早在20世纪50年代初,美国人罗伯特就发明了一种将电动机、传动系统和制动系统融为一体的轮毂装置。该轮毂于1968年被通用电气公司应用在大型的矿用自卸车上。相对与传动汽车、单电机集中驱动的汽车,轮毂电机式电动汽车具有以下优点: (1)动力控制通过电子线控技术实现对各电动轮进行无级变速控制,以及各电动轮之间的差速要求,省略了传统汽车所需的波箱、离合器、变速器、传动轴等;在电机所安装的位置同时可见,整车的结构变得简洁、紧凑,车身高降低,可利用空间大,传动效率高。 (2)容易实现各电动轮的电气制动、机电复合制动和制动能量回馈。
(3)底架结构大为简化,使整车总布置和车身造型设计的自由度增加。若能将底架承载功能与车身功能分离,则可实现相同底盘不同车身造型的产品多样化和系列化,从而缩短新车型的开发周期,降低开发成本。 (4)若在采用轮毂电机驱动系统的四轮电动汽车上导人线控四轮转向技术(4WS),实现车辆转向行驶高性能化,可有效减小转向半径,甚至实现零转向半径,大大增加了转向灵便性。 1.电动汽车基本参数参数确定 1.1 该电动汽车基本参数要求,如下表: 参数 数值 参数 数值 最大总质量(kg ) 1400 轮胎半径(m ) 0.33 迎风面积(㎡) 2.50 传动效率 0.90 风阻系数 0.33 最高车速(km/h ) 100 1.2 动力性指标如下: (1)最大车速max 100a u km ≥; (2)在车速a u =60km/h 时爬坡度i ≥5%(3度); (3)在车速a u =40km/h 时爬坡度i ≥12% (6.8度); (4)原地起步至100km/h 的加速时间35t s ≤; (5)最大爬坡度i ≥12%(16度); (5)0到75km/h 加速时间25t s ≤; (6)具备2~3倍过载能力[7]。 2.电机参数设计
驱动电机参数确定
电动汽车技术一、驱动电机参数确定
(1)最高车速时计算驱动电机功率 电机的功率必须能满足电动轿车最高车速的要求,以保证在良好的路面或空载情况下,能以较高的车速行驶. 最大车速时所需功率: 2D a 1cos 21.153600a M axV V C A P Gf V ??=++ ???η=24.7(KW ) m=2600kg ;V a=90 km/h ;f=0.016; C D =0.5;η=0.95;B=1.46m ;H=1.87m; (2)加速性能计算驱动电机功率。 保证在良好的路面或空载情况下,整车加速过程的末时刻为电动汽车输出最大功率,加速过程所需最大功率: = 25.6(kw ) (3)最大爬坡度时计算驱动电机功率 在计算最大爬坡度时的电机功率时,应忽略加速阻力功率 爬坡过程所需最大功率: =32.84(kw) 根据以上各式计算得出发动机在不同工况下的扭矩和驱动力: P=Tn/ n=(Va ×i 0)/(0.337×r) (2) 联立上面两个方程可得 M axV T =70Nm, Ft=890N 23D 13600 1.521.152.5a a MaxJ a a a t u u C Au P mgf t t t ??=+ ? ????δη136003600a a MaxGra t mgfu mgiu P ??=+ ??? η
T=408Nm, Ft=5.9kN M axJ T=650Nm, Ft=8.1kN M axG ra 由此可得根据(1)计算可知选定电机的额定功率为30kw,由(2)(3)可知选定电机的峰值功率为60kw,最大扭矩为650Nm 二、电池组电压、容量的确定 在选择了电机类型以后,就要确定电池的参数。在一定的电机功率下,电压越高,电流就越低,线路功率损失就越小,在电池以小电流放电时,可发挥出较大的容盈。 根据0.15kWh/km×150km=22.5kWh即所需电池的容量为22.5kWh,考虑到其它电气设备,选择电池容量为25kwh。 锂电单体的容量为270Wh,铅酸电池单体的容量为1.44kWh;若选锂电池则需要92个单体,若选铅酸电池则需要18个单体 三、采用Matlab计算绘制驱动力和行驶阻力图 clear;clf; axis([0, 250, 0, 12000]); ig=1; i0=4.1; r=0.325; G=26000; f=0.016; Cd=0.5; A=2.73; Pmax=60; Torque=650; v=0:26.35; Fw =(f*G+Cd*A*(v.^2))./21.15; F=v*0+(Torque*ig*i0)./r; hold on plot(v,Fw,v,F); v=26.35:250 F=(9549*Pmax*0.377)./v;