HT9800校准方法
HT9800校正方法
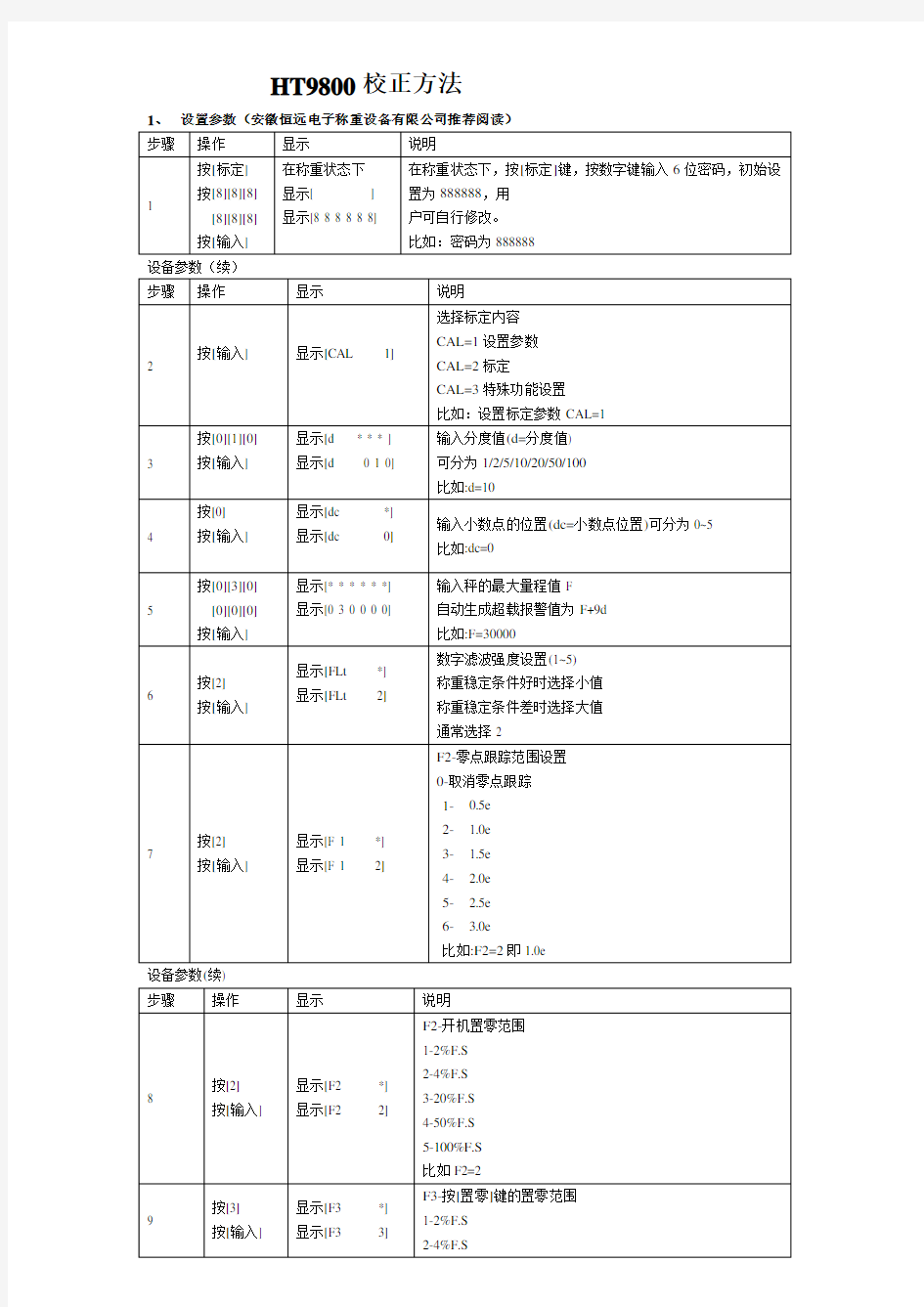
1、设置参数(安徽恒远电子称重设备有限公司推荐阅读)
设备参数(续)
设备参数(续)
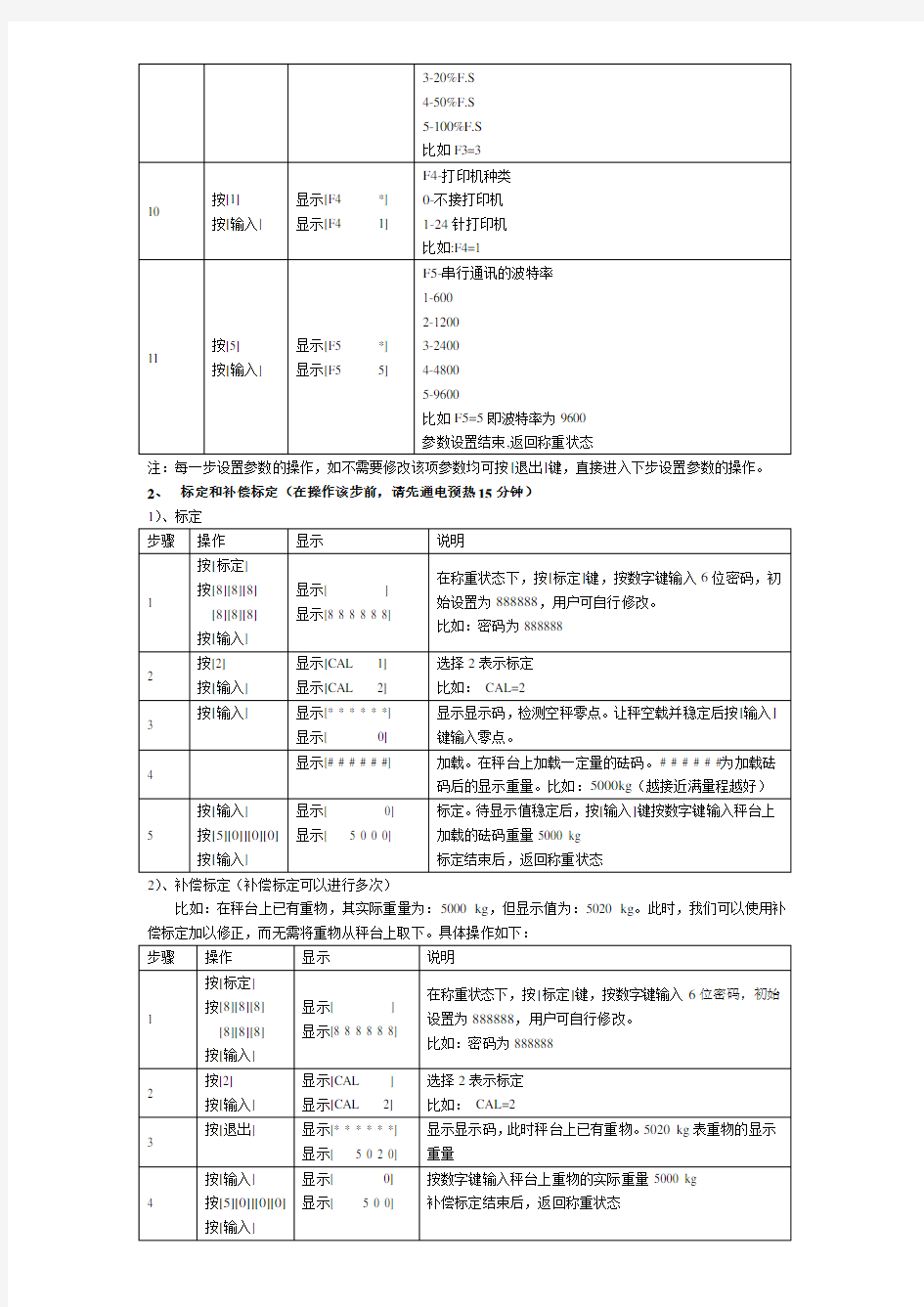
注:每一步设置参数的操作,如不需要修改该项参数均可按[退出]键,直接进入下步设置参数的操作。2、标定和补偿标定(在操作该步前,请先通电预热15分钟)
1)、标定
2)、补偿标定(补偿标定可以进行多次)
比如:在秤台上已有重物,其实际重量为:5000 kg,但显示值为:5020 kg。此时,我们可以使用补偿标定加以修正,而无需将重物从秤台上取下。具体操作如下:
PH计校准方法
除了按一般电子仪器使用保养的规范,主要是对参比电极的维护保养。 每种电极购置时应附有维护保养要求,严格按其要求做就成了。 提供上海雷磁仪器厂的介绍请作参考。 酸度计简称pH计,由电极和电计两部分组成。使用中若能够合理维护电极、按要求配制标准缓冲液和正确操作电计,可大大减小pH示值误差,从而提高化学实验、医学检验数据的可靠性。 一、正确使用与保养电极 目前实验室使用的电极都是复合电极,其优点是使用方便,不受氧化性或还原性物质的影响,且平衡速度较快。使用时,将电极加液口上所套的橡胶套和下端的橡皮套全取下,以保持电极内氯化钾溶液的液压差。下面就把电极的使用与维护简单作一介绍: ⒈短期内不用时,可充分浸泡在蒸馏水或1×10-4盐酸溶液中。但若长期不用,应将其干放,切忌用洗涤液或其他吸水性试剂浸洗。 ⒉使用前,检查玻璃电极前端的球泡。正常情况下,电极应该透明而无裂纹;球泡内要充满溶液,不能有气泡存在。 ⒊测量浓度较大的溶液时,尽量缩短测量时间,用后仔细清洗,防止被测液粘附在电极上而污染电极。 ⒋清洗电极后,不要用滤纸擦拭玻璃膜,而应用滤纸吸干, 避免损坏玻璃薄膜、防止交叉污染,影响测量精度。 ⒌测量中注意电极的银—氯化银内参比电极应浸入到球泡内氯化物缓冲溶液中,避免电计显示部分出现数字乱跳现象。使用时,注意将电极轻轻甩几下。 ⒍电极不能用于强酸、强碱或其他腐蚀性溶液。 ⒎严禁在脱水性介质如无水乙醇、重铬酸钾等中使用。 二、标准缓冲液的配制及其保存 ⒈pH标准物质应保存在干燥的地方,如混合磷酸盐pH标准物质在空气湿度较大时就会发生潮解,一旦出现潮解,pH标准物质即不可使用。 ⒉配制pH标准溶液应使用二次蒸馏水或者是去离子水。如果是用于0.1级pH计测量,则可以用普通蒸馏水。 ⒊配制pH标准溶液应使用较小的烧杯来稀释,以减少沾在烧杯壁上的pH标准液。存放pH标准物质的塑料袋或其它容器,除了应倒干净以外,还应用蒸馏水多次冲洗,然后将其倒入配制的pH标准溶液中,以保证配制的pH标准溶液准确无误。 ⒋配制好的标准缓冲溶液一般可保存2—3个月,如发现有浑浊、发霉或沉淀等现象时,不能继续使用。 ⒌碱性标准溶液应装在聚乙烯瓶中密闭保存。防止二氧化碳进入标准溶液后形成碳酸,降低其pH值。三、pH计的正确校准 pH计因电计设计的不同而类型很多,其操作步骤各有不同,因而pH计的操作应严格按照其使用说明书正确进行。在具体操作中,校准是pH计使用操作中的一重要步骤。表1的数据是精度为0.01级、经过计量检定合格的pH计在未校准时与校准后的测量值,从中可以看出校准的重要性。 标准pH 校准前误差(pH)校准后误差(pH) 13.000 00.0600 00.0000 12.000 00.0450 00.0005 11.000 00.0500 00.0010
LC-MS自校准方法
Bruker Esquire HCT PLUS 大容量离子阱LC/MSn 液相色谱-质谱联用仪自校准方法 本规程参照国际法制计量组织(OIML)技术工作导则第二部分:OIML国际建设和国际文件起草与表述规程、JJG1002-1998国家计量检定规程编写和GB3100-93国际单位制及其应用编写的。 1.范围 本规程适用于新安装、使用中和调试后的液相色谱-质谱联用仪的自校准方法。 2.计量单位 本规程中的计量单位一律采用国家颁布的法定计量单位及其符号。 3.计量要求 质谱:质量范围50~3000m/z 质量稳定性:标样的离子,在仪器工作4h后,其漂移应在±0.5u以下 分辨本领:R=m/Δm 灵敏度:MS灵敏度:把溶在溶剂中的标样,用注射器进样,标样的目标离子信噪比大于10:1;MS/MS灵敏度:标样的目标二级离子信噪比大于10:1 液相色谱:可按要求做各种配比的流动相变化 流动相:甲醇、乙腈、水均应为色谱级,使用前应需过滤、脱气。 5.技术要求 5.1 外观要求 仪器应有下列标志:仪器名称、型号、制造厂名、生产日期及仪器编号等;仪器主机、色谱仪、计算机、检测器、真空部件等各部件必须完好无损;仪器各参数选择和按键形状、标记应清晰无误,并易于操作,仪器启动后应无异常噪声在。 5.2 安装条件 仪器及所有紧固良好,连接线应连接良好,活动部件应平稳适宜,气路系统应可靠密封,不泄漏,仪器的各旋钮及功能应能正常工作。 5.3 环境 室内环境:应清洁无尘,无易燃、易爆、腐蚀性气体,室内排风良好,不应放置与测定无关的其它杂物。温度:10~30℃,相对湿度:≤85% 电源:电压220±10v 频率50HZ
ABB机器人零点校准方法
FlexPendant 的操作方式 1、操作 FlexPendant 时,通常左手持设备,右手在触摸屏上操作。具体手持方法如图12所示 图12 2、手持操作器主要部件如图13所示 图 13 3、控制柜上的主要按钮和端口如图14所示 图 14 4、控制柜上钥匙开关的位置于意义如图15所示 图15 注:手动全速模式不建议使用 校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置) 方法: 1> 点击 ABB 2> 点击手动操纵
图 1第二步:选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 - 3 或者轴4 - 6 3> 点击确定 第三步:选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击 tGripper 3> 点击确定 图2图3第四步:选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小 3> 点击确定 图 4 图 5 第五步:手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系
注意: 如果先前选择轴1 - 3 则 1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 - 6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点 图 6 A(六轴机器人) 图 6B(四轴机器人) 移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步:更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击 ABB 2> 点击校准 3> 点击 ROB_1 (参看图7)
PH计校准步骤
PH校准步骤 以凝胶电极、M420变送器为例 1、标定前先设置好M420变送器的参数 按变送器上的上下左右键的任意一个,然后按左右键选择CONF,在CONF中,有PAREST A和OUT1等选项,在PAREST A中一直选enter,会出现: ①RTD TYPE(温度传感器类型),根据所用电极按上下键选择 Pt100、Pt1000、30NTC的其中一种; ②TEMP UNIT(温度单位) ℃和℉,选择其一; ③TEMP MEAS(温度值) 有AUTO、MAN、EXT三种,常用为AUTO、MAN,选择AUTO时为自动检测温度值,选择MAN时为手动输入温度值; ④TEMP CAL(温度校准) 有AUTO、MAN、EXT三种,常用为AUTO、MAN,选择AUTO时为自动校准温度,选择MAN时为手动输入温度; ⑤CAL MODE(校准模式) 有AUTO、MAN、DAT三种,选AUTO 时,电极放入标准液中自动检测标准液的PH值,无需人动,选MAN 校准时,手动输入标准液的PH值,选择DAT时,表示电极在此次使用前就已经标定好了,零点和斜率都已知,那么在本次使用时只需选择此种模式,然后在校准模式下输入零点和斜率即可。 ⑥以上完成后,在OUT1中设定PH 范围和输出电流范围,然
后长按MEAS键返回。 2、PH标定步骤(以自动校准为例) ①电极放入标准液前先用纯化水清洗电极头,然后用柔软纸巾吸干水分,注意切勿摩擦PH敏感膜,清洗完毕后看电极头部是否有气泡,如有气泡,轻甩电极以去除气泡; ②以上完成后,将电极放入标准液中,浸泡大约30秒,然后选择CAL,按下enter,选择校准方法CAL__PH,按下enter,如果设定了手动输入温度,则手动输入温度,变送器显示自动识别的缓冲液数值,数值稳定后按enter键,当第一种缓冲液校准完毕后,屏幕出现“CAL2”,此时将电极拿出,清洗干净并擦干净,放入第二种缓冲液中,浸泡至少15秒后进行校准,方法如上。校准完后,屏幕会出现零点和斜率值,同时屏幕会出现笑脸、哭脸和一般的表情,笑脸为校验结果较好,哭脸为结果不好。 校准完毕若需回测,将电极清洗擦干净后放入另一种标准液中,看其显示的数值与标准液的值是否接近或吻合,如接近或吻合,则结果较好。 PH为7和4时,斜率在90%-110%之间为正常,100%为最佳,零点在-30-30mv之间为正常 版权所有,翻版必究
自校零和自校准技术
新型传感器论文题目:自校零和自校准技术
摘要 本文从原理上分析论证了自校准与自校零技术;重点论述了实时在线校准技术的实现方法,从校准的定义出发,引申出了仪器仪表自校准的概念,并对自校准实现的基本原理和过程进行了分析,提出了自校准设计过程中几个关键点,以及这些关键点对自校准的影响。 关键词:传感器;电信号;自校零技术;自校准技术
第一章引言 在传感器的测量过程中,由于仪器内部器件的零点偏移及其温漂,即使零输入时也有输出读数,产生测量误差。 进行自校准的目的,其一,不必将测试仪器仪表脱离原有的环境专门送至校准机构进行校准,在误差精度满足的前提下,提高便利性,同时保证环境的一致性;其二,某些电测仪器设备集成在大型设备中,不容易拆卸,若能够自校准,将更加方便;其三,单片机等控制器及校准电路为自校准的实现成为了可能,可实现自动化,不用进行人工校准。 本文主要针对传感器的自校零技术和自校准技术进行论述。通过对这方面的了解与学习,希望可以在现有的技术水平上进行改进,使其有更好的性能,能更准确地工作,更好地为我们所用。
第二章自校零技术 在传感器的测量过程中,由于仪器内部器件的零点偏移及其温漂,即使零输入时也有输出读数,产生测量误差。 2.1自校零的原因 因为仪器存在误差且误差很可能随环境而变化,所以就需要设计一种自校正装置,使得传感器的参数发生漂移时能够实现自我的补偿与校准,从而使得测量结果更加精确。 以线性系统为例,假设一传感器系统经标定实验得到的静态输出(y)—输入(x)特性如下: y=a 0+a 1x 式中:a 0——零位值,即当输入x=0 时之输出值; a 1——灵敏度,又称传感器系统的转换增益。 对于一个理想的传感器系统,a 0与a 1应为保持恒定不变的常量。但是实际上,由于各种内在和外来因素的影响,a 0 , a 1都不可能保持恒定不变。譬如,决定放大器增益的外接电阻的阻值就会因温度变化而变化,因此就会引起放大器增益改变,从而使得传感器系统总增益改变,也就是系统总的灵敏度发生变化。设a 1=S+Δa 1, 其中S 为增益的恒定部分,Δa 1为变化量;又设a 0=P+Δa 0,P 为零位值的恒定部分,Δa 0为变化量,则 x a S a P y )()(10?++?+= 式中:Δa 0——零位漂移; Δa 1——灵敏度漂移。 2.2传感器的实时在线自校准 2.2.1实时测量零点 实时测量零点有两种方法,方法一:不含传感器自校,如图2.1所示;方法二:含传感器自校,如图2.2所示。
CNAS-TRL-004:2017《测量设备校准周期的确定和调整方法指南》
CNAS技术报告 测量设备校准周期的确定和调整方法指南中国合格评定国家认可委员会
前言 本文件根据ISO/IEC 17025:2017《检测和校准实验室能力的通用要求》,参考ILAC-G24/OIML D 10《测量设备校准周期的确定指南》和NCSL RP-1《校准周期的确定和调整》制定,提出了测量设备校准周期的确定和调整方法,并给出了具体的应用实例,为实验室在校准测量设备时提供指导。 实验室可参考本文件,根据设备的具体情况,如使用用途、历次校准结果、期间核查结果、稳定性、维护保养、使用频率、环境条件等,综合考虑设备使用的风险大小和成本投入,来确定和调整其校准周期。 本文件包含2个资料性附录。 本文件由中国合格评定国家认可委员会提出并归口。 本文件主要起草单位:中国合格评定国家认可中心、福建省计量科学研究院、山东电力研究院。 本文件主要起草人:王阳、安平、林志国、张明霞、周思旭、林景星、范巧成。
测量设备校准周期的确定和调整方法指南 1目的和范围 本文件提出了测量设备校准周期的确定和调整方法并给出了具体的应用实例,为相关机构在校准测量设备时提供指导。 本文件适用于检测/校准实验室、检验机构、标准物质生产者和能力验证提供者等合格评定机构(以下统称“实验室”)。 本文件的测量设备(简称设备)包含测量仪器、测量标准和辅助装置等。 当法律法规或规范对校准周期有强制要求时,实验室应满足相关规定。 2规范性引用文件 下列文件中对于本文件的应用是必不可少的。凡是注日期的引用文件仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括修改单)适用于本文件。 2.1I SO/IEC 17025:2017检测和校准实验室能力的通用要求 2.2R B/T 197检测和校准结果及与规范符合性的报告指南 2.3J JF 1094测量仪器特性评定 2.4I SO/IEC指南99:2007 国际计量学词汇基础和通用概念及相关术语(VIM) 2.5J JF 1001—2011通用计量术语及定义 3术语和定义 ISO/IEC指南99(VIM)和JJF 1001中界定的及下列术语和定义适用于本文件。 3.1校准周期calibration interval 特定项目的测量设备连续、有计划的校准的时间间隔。 3.2测量可靠性measurement reliability 某个指定属性项目的测量设备符合性能规范的概率(校准周期分析的一个基本假设:测量可靠性是设备历次校准时间的函数)。 4确定需要校准的设备 ISO/IEC 17025:2017的6.4.4规定:“当设备投入使用或重新投入使用前,实验室应验证其符合规定的要求”。对设备进行验证的手段包括校准和核查。
常用玻璃量器的自校准方法
深圳市龙岗区环境监测站 作业指导书 标题:常用玻璃量器的自校准方法
文件编号:LGHJ/ZY-ZB-09(第A版,第0次修订)第1页共4页 1、目的 对常用玻璃量器进行自校准,使其适合准确度要求较高的分析工作。 2、范围 适用于本站实验室在下列情况中使用的滴定管、吸管、量瓶等玻璃量器的自校准:2.1为满足实验分析中需要准确定量的玻璃量器进行自校准。 2.2在实验过程中,对玻璃量器的标称值有怀疑时要对所用玻璃量器进行自校准。 3、职责 3.1质保人员对分析中准确定量的玻璃量器进行自校准,并对校准结果进行判定、 编写自校准报告。 3.2科室主任负责审核和签发自校报告。 4、技术要求与检定条件:见《常用玻璃量器检定规程》JJG196-1990。 5、校准程序 5.1玻璃量器的校准采用衡量法。 5.2清洗被检量器:量器用重铬酸钾洗液和等量的浓硫酸混合剂或清洁剂进行清洗,然后用水冲净,器壁上不应有挂水等沾污现象。液面下降或上升时与器壁接触处形成正常弯液面。 5.3洗净的量器应提前放入工作室,使其与室温尽可能接近。 5.4取一只容量大于被检量器的洁净有盖称量杯(如果检定量瓶则取一只洁净干燥 的待检量瓶),进行空称量平衡。 5.5滴定管的校准 5.5.1活塞密合性检查 在活塞不涂凡士林的清洁滴定管中加蒸馏水至零标线处,放置20分钟后,漏水量应不超过1小格。 5.5.2校准操作:滴定管的活塞两端涂好凡士林(以能达到润滑的目的为准,万勿沾污塞孔!),加蒸馏水到零标线处,记录水温。以滴定的速度放出0~10毫升水(相差不要超过±0.1毫升)于已称量的称量杯中,再准确称量至0.001克。两次称量之差即为放出水的质量。同法,依次称出0~20、0~30…毫升等分度线间水的质量,按实
KUKA机器人 轴零位校准方法 EMT
KUKA机器人6轴零位校准方法(EMT) Lyq 20150108 一.手动状态T1,在轴坐标系,将机器人1到6轴分别移动到其原始零点附近,目测每个轴上的两个零位观察缺口要对准。 二.将EMT安装在轴1的校零槽位内,将另一端连接到机器人底座上的X32插口 三.操作KUKA控制手柄,依次选择如下菜单进入零位校准模式 1. 配置,用户组
2. 选专家,密码kuka 3. 选择准备运行,零点校正,电子测量器 4. 标准,检查零点校正 5. 选择机器人轴1,将下方报警栏信息清空,左手按住手柄背面的驱动按键,等驱动 图标“I”变成绿色,按”检查“按钮对应的软键,报警栏会出现准备就绪字样。此时轴1已经开始微动,可以观察到EMT上的两个绿色指示灯会由两个全亮变为只有1个亮,伴随着咔嗒一声,校准结束。这时如果校准后零位与现零位偏差很小,报警栏直接会显示”轴1零位校准结束“,如果校准后零位与现零位偏差超限,则会
在右侧信息栏显示校准前后的数据差别,包括编码器码值差和角度差,需要选择” 存储”后才能完成零位校准。 6. 将EMT移动到轴2的校零槽位内,另一端依然连接到机器人底座上的X32插口; 在右侧信息栏选择机器人轴2,按照上述步骤对轴2进行零位校准 7. 依次对余下的4个轴进行零位校准 四.都较准完毕后,手动模式慢速运行“维修”程序,将机器人打到维修位,观察行程和位置是否正常,若正常,之后再运行主程序,手动慢速回HOME点,观察行程和位置是否正常,若正常,则进行过料测试。 五.因本次进行零位校准的是KR150割带机器人,那么在解包系统电控柜操作屏上选择“启用KR150机器人”,在机器人KCP上选择main程序,自动,启动,等待自动对烟包割带,看是否正常。若一切正常,则本次零位校准结束。
常用PH计酸度计电极的使用方法及注意事项
一、P H电极的标定(1)标定前先手拿着电极甩几下,赶走留在电极里的空气及气泡 (2)一般采用二点标定6.86pH作为第一点,4.00pH或9.18pH作为第二点 (3)标定过程中尽可能让电位或pH值稳定后再按确认键 (4)一般电极性能较好时,标定后的斜率在98%以上,性能略微下降时应在95%。低于90%建议更换电极 (5)复合电极不适宜测有机物。油脂类,粘稠等物质,如需测这些物质,可选用231-01玻璃电极212-01参比电极或65-1C (6)仪器操作前请仔细阅读说明书。 注:冬天时,环境温度达到冰点,电极不能使用,容易发生冷爆,测量不稳定,建议在15度以上使用。 二、PH复合电极是否正常的判断方法 (1)在标定状态下,反映较慢,稳不下来是电极性能下降的体现。 (2)电极电位:把仪器档位切换到mV档,把电极放入pH=6.86的标液中,值在0mV左右为最好,最多在正负40mV以内。超出这个范围仪器将不能正常标定,标定会出错。
6.86pH—0mV正负40mV? 9.18pH—负120~130mV左右??? 4.00pH—170mV左右 雷磁PHS-25型PH酸度计 三、PH复合电极维护及保养 (1)?很多情况下出现测量不准或无法正常测量都是由电极本身失效或性能下降造成。 (2)?复合电极的保质期为一年,出厂一年后不管是否使用其性能都会受到影响。 (3)第一次使用(护套内无溶液)或长时间停用的PH电极在使用前必须在3mol/l氯化钾溶液中浸泡24小时。 (4)测量完电极插到装有氯化钾溶液的护套中,经常观察电极棒内的氯化钾的量,要及时添加,一般不要少于一半,上部塞子测量时拔出,不测量时塞上。 (5)电极应避免长期浸在蒸馏水、蛋白质溶液和酸性氟化物溶液中。电极避免与有机硅油接触。 (6)pH复合电极的使用,最容易出现的问题是外参比电极的液接界处,液接界处的堵塞是产生误差的主要原因。
测厚仪自校准方法
超声波测厚仪自校准方法 1.目的 为了保证超声波测厚仪的正确使用及测量结果的准确可靠,特制定本自校准方法。 2.依据 超声波测厚仪使用手册等 3. 校准方法 3.1 采用台阶试块,分别在厚度接近待测厚度的最大值和待测厚度的最小值(或待测厚度最大值的1/2)进行校准。 3.1.1试块的基本要求和尺寸见附图。3.1.2 测定曲面工件厚度时,应使用同一曲率的试块,或者对平面试块加以修正。 3.2 将探头置于较厚试块上,调整声速,使得测厚仪显示读数接近已知值。 3.3 将探头置于较薄试块上,调整零位,使得测厚仪显示读数接近已知值。 3.4 反复调整,使得量程的高低两端都得到正确读数,仪器即告调整完毕。 3.5 如果已知材料声速,则可预先调好声速,然后在仪器附带的试块上,调节零位,使得仪器显示为试块的厚度,仪器即告调整完毕。 4.记录 校准过程应做好记录工作,记录至少包括仪器型号、探头、试块、耦合剂、校核人员、测定日期。记录格式见“超声波测厚仪自校准记录表”(SDTJ/JH-01-01)。 编制: 审核: 批准:
附图: 6.3
超声波测厚仪自校准记录表 SDTJ/JH-01-01
超声波测厚仪自校准、期间核查记录表填写说明 1、设备名称:超声波测厚仪 2、设备型号:进行自校准或核查的超声波测厚仪本身的型号;如:TT120、TT100等 3、本院编号:进行自校准或核查的超声波测厚仪在本单位内部的仪器编号 4、出厂编号:进行自校准或核查的超声波测厚仪出厂时生产厂家给定的编号 5、声速:对超声波测厚仪进行自校准或核查时,根据标准块的材质选定的超声波声速,例如:当 标准块的材质为碳钢时超声波测厚仪的声速应为v=5790m/s;当标准块的材质为不锈钢时 超声波测厚仪的声速应为v=5900m/s 6、标准块厚度:对超声波测厚仪进行自校准或核查时所使用的标准试块的实际厚度 7、显示值:进行自校准或核查的超声波测厚仪对标准块进行测厚时超声波测厚仪所显示的标准块厚度 值 8、允许误差:根据标准块实际厚度,运用允许误差计算公式计算得到的数值 9、实际误差:标准块厚度与显示值的差值 10、备注:对超声波测厚仪进行自校准或核查的结果 11、说明:对超声波测厚仪进行自校准或核查过程中需要特别说明的问题 12、校准人:对超声波测厚仪进行自校准或核查的操作者姓名 13、年月日:对超声波测厚仪进行自校准或核查的时间
爱普生机器人原点校准方法
爱普生机器人原点校准 方法 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
EPSON机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 3.手动将机械手调整到脉冲零点位置;如下图所示: +Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:( U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图:
4. 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入: Encreset 1 按回车 Encreset 2按回车 Encreset 3按回车 Encreset 3,4按回车 如图: 5. 保持机械手目前手动零点位置不动,重启控制器,具体操作如图: 6. 保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下: Calpls 0,0,0,0 回车.如下图: 8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入: calib 1 按回车 1轴 calib 2按回车 2轴 calib 3按回车 3轴 calib 3,4按回车 4轴 (如只需校第一轴,calib 1即可,以上将4个轴都校正) 机械手脉冲零点的脉冲保存完成,效正基本完成。 7.保持机械手目前手动零点位置不动,打开机器人管理器,点击motor on后,在步进示教可看到如下界面: 其当前世界坐标值x:400 y:0 z:0 u:0 当前关节及脉冲值均为0, 8.验证,将机械手的位置移动,是x、y、z、u的值均有很大变化后,在软件打开命令窗口(ctrl+M)中输入:pulse 0,0,0,0 回车。此时机械手会自动回到刚校正的脉冲原点位置。
计量器具设备校验方法
计量器具设备校验方法
计量器具设备校验方法 塔—额—托公路改建工程第四合同段 项目部试验室
马歇尔电动击实仪 1、概述:本仪器适用于对沥青混合料试件的制作,以供试验室进行沥青混合料物理力学性质试验使用。 2、引用标准:JTJ052-2000《公路工程沥青及沥青混合料试验规程》(T0702-93)。 3、技术要求 1)击锤质量:4536±9g 2)落锤高度:457.2±1.5mm 3)锤击次数:60±4次/分 4)试模规格:φ101.6×87mm±1mm 4、校验条件 1)校验环境室温20±30C,相对湿度大于50% 2)用已送检过的10000g案秤,感量5g 3)用已送检过的钢卷尺(5m),分度值1mm 4)用送检过的秒表 5)用送检过的游标卡尺200mm,分度值0.02mm 5、校验项目 1)击锤质量 2)落锤高度 3)锤击次数 4)试模规格
6、校验方法 1)用10000g案秤,秤取击锤质量。 2)用5m钢卷尺,量取落距。 3)用秒表记录锤击次数。 4)用200mm游标卡尺,量取内径及高度。 5)校验结果取两次校验平均值。 7、校验结果处理 1)击锤质量4536±9g范围内,否则不合格。 2)落锤高度457.2±1.5mm范围内,否则不合格。 3)锤击次数60±4次/分范围内,否则不合格。 4)试模规格ф101.6×87mm±1,否则不合格。 8、校验周期:12个月 9、附录: 马歇尔电动击实仪校验记录 校验单位:五支队校验号:沥-01 温度:21.50C 湿度:75% 校验项目技术要求校验数据校验结果击锤质量4536±9g 4539g 合格 落锤高度457.2±1.5mm 457.9mm 合格 锤击次数60±4次/分63次/分合格 试模规格ф101.6×87mm±1mm ф101.6×86.5mm 合格 检验结果合格 技术负责人:审验:校验:年月日
自校准方法编写规定
1 目的 对检测设备自校准方法的编制进行控制,保证自校准方法正确实用、满足自校准工作要求。 2 范围 适用于本实验室检测工作使用中或修理后的、目前尚无计量检定规程需要并且有可能进行自校准的检测设备自校准方法的编审。 3 职责 3.1质控室负责组织编制自校准方法,并监督执行; 3.2相关室主任负责组织对自校准方法进行实验验证; 3.3技术负责人批准自校准方法。 4 要求 4.1每种自校准设备编写一个自校准方法。 4.2自校准方法编写格式要求。 4.2.1自校准方法的编号如下: 顺序号 4.2.2自校准方法的文件名称为:□□□自校准方法,其中□□□为检测设备名称。 4.3自校准方法内容要求。 4.3.1目的 编制自校准方法的目的。 4.3.2适用范围 说明自校准方法适用的检测设备种类和型号。 4.3.3职责 规定相关责任人的责任。 4.3.4概述 对检测设备的结构、原理及主要用途作简单介绍。
4.3.5技术要求 4.3. 5.1设备外观要求,包括对设备标志、成套完整性、各种开关、电源线等的要求。4.3.5.2技术指标的要求全面、详细。 4.3.6校准条件 包括设备外观及环境条件、仪器安装要求、校准设备、校准标准物质。根据实验室程序文件《实现测量可溯源性程序》(HSJC-PF-223-2009)要求,自校准应有经检定合格的计量器具或可港源标准物质作为依据。 4.3.7自校准项目和自校准方法 应包括设备一般检查和各项性能检查。 4.3.8自校准周期 规定设备自校准周期。 4.3.9支持性文件 列出自校准方法中直接引用和必须配合使用的文件名称和编号。 4.4自校准方法实验验证 操作人员对设备进行自校准,出具自校准报告,主任审核自校准报告。 5 相关文件 5.1 HSJC-PF-203-2009《管理体系文件控制和维护程序》 5.2 HSJC-PF-223-2009《实现测量可溯源程序》 5.3 HSJC-PF-222-2009《仪器设备的控制与管理程序》 5.4 HSJC-PF-217-2009《检测方法及方法确认程序》 6 运行记录 6.1《检测设备自校准方法文稿》 6.2《检测设备自校准实验原始记录和实验报告》 6.3《检测设备自校准不确定度分析(必要时)》 6.4记录表HSJC-ZK-307-2009/01《检测设备自校准方法审批表》
校准机器人零点位置的具体方法
校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置)方法: 1> 点击ABB 2> 点击手动操纵 图 1 第二步: 选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 -3 或者轴4 -6 3> 点击确定 第三步: 选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击tGripper
图 2 图 3 第四步: 选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小
图 4 图 5 第五步: 手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系注意: 如果先前选择轴1 -3 则
1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 -6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色 胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各 自机械绝对零点
图 6
移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步: 更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击ABB 2> 点击校准 3> 点击ROB_1 (参看图7) 图7 4> 点击转数计数器(参看图8) 5> 点击更新转数计数器…(会弹出一个警告界面) 6> 点击是
怎样校准校正PH计
怎样校准校正PH计(酸度计) 酸度计的应定期检定校准,使精密度和准确度符合要求。怎么校准PH计,或者说是怎样校正酸度计。以下是笔者整理出来的资料。有直接用配置好的标准缓冲液校准,有的需要自己配置标准缓冲液再校准,下面就看看这两种不同的前提,相同的校准方法步骤。供需要的朋友参考参考。 工具/原料 ?标准缓冲液(应选择与供试液pH值接近的标准缓冲液),目前标准溶液有7种,在我国一般使用以下3种溶液:(pH值在25℃时) ? 1)邻苯二甲酸氢钾(KHC8H4O4) 4.003pH; 0.05M 2)混合磷酸盐(Na2HPO4) :磷酸二氢钾和磷酸氢二钠混合盐溶液 6.864 pH; 0.025M 3)硼砂(Na2B4O7· l0H2O) 9.182 pH:0.01M ? 这三种标准缓冲液的配置方法如下: 1)pH4,邻苯二甲酸氢钾标准缓冲液:
精密称取在115±5℃干燥2~3小时的邻苯二甲酸氢钾 [KHC8H4O4]10.12g,加水使溶解并稀释至1000ml。 2)pH7,磷酸盐标准缓冲液(pH7.4): 精密称取在115±5℃干燥2~3小时的无水磷酸氢二钠4.303g与磷酸二氢钾1.179g,加水使溶解并稀释至1000ml。 另补充:磷酸盐标准缓冲液(pH6.8) 精密称取在115±5℃干燥2~3小时的无水磷酸氢二钠3.533g与磷酸二氢钾3.387g,加水使溶解并稀释至1000ml。 3)pH9,硼砂标准缓冲液: 精密称取硼砂[Na2B4O7·10H2O]3.80g(注意:避免风化),加水使溶解并稀释至1000ml,置聚乙烯塑料瓶中,密塞,避免与空气中二氧化碳接触。 步骤/方法 1. 实验室使用的PH计|酸度计校准: 常用的实验室PH计仪器校正时,要把仪器的斜率调到最大,并拨开电极上部的橡胶塞,使小孔露出,否则在进行校正时,会产生负压,泞致溶液不能正常进行离子交换,会使测量数据不准确。
爱普生机器人原点校准方法
EPSON机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用, 需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图: 2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图:
— 3.手动将机械手调整到脉冲零点位置;如下图所示: +Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:( U轴0位,丝杆端面对应外套上的指针;丝
—杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手 伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图: 4. 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在 软件中打开命令窗口(ctrl+M)中输入: Encreset 1 按回车 Encreset 2按回车 Encreset 3按回车 Encreset 3,4按回车 如图: 5. 保持机械手目前手动零点位置不动,重启控制器,具体操作如图:
设备自校方法
四川振通公路工程检测咨询有限公司试验室 文件编号:ZTJ/QC550.1-2011 作业指导书 公路工程质量检测仪器(设备)检验方法 版本号:C/1 共84 页第0 页 受控状态: 持有者:发放编号: 2011.8.31 发布2011.9.1 实施
四川振通公路工程检测咨询有限公司发布 1、目的 为了进一步完善公司设备自校工作,保证量值溯源的有效性,促进试验检测工作质量,特制定本方法。 2、范围 本公司范围内应自校的所有仪器设备。 3、相关/支持性文件 3.1 ZTJ/QP930-2007 量值溯源程序文件 4、术语和定义 本文件采用本公司质量手册中的术语和定义。 5、职责 5.1 质量技术部负责公路工程检测仪器校验工作制度的制定,并对校验工作的具体实施进行指导。 5.2 综合部对校验作进行协助。 5.3 各试验检测室负责校验工作的具体实施。 6、校验方法 校准的仪器设备划分为土工、集料、水泥及水泥混凝土、沥青及沥青混合料、其他、常用共6类,对其中常用的61台(套)仪器设备编写了校准方法,对常用的6个工具设备编写了检查方法;并针对每个校准/检查方法编制了记录表格。
6.1 公路工程质量检测仪器(设备)检验方法目录 一、土工类仪器设备校准方法 1.土工标准筛校准方法 ZT01-11 2.电热鼓风干燥箱校准方法ZT02-11 3.液塑限联合测定仪校准方法ZT03-11 4.电动击实仪校准方法ZT04-11 5.土工环刀校准方法ZT05-11 6.CBR试验装置校准方法ZT06-11 7.手动土壤击实仪校准方法ZT07-11 8.回弹模量测定仪校准方法ZT08-11 9.表面振动击实仪试模校准方法ZT09-11 10.无侧限抗压试模校准方法ZT10-11 二、集料类仪器设备校准方法 1.标准筛校准方法ZT11-11 2.针片状规准仪校准方法ZT12-11 3.压碎值试验仪校准方法ZT13-11 4.洛杉矶磨耗试验机校准方法ZT14-11 5.加速磨光机校准方法ZT15-11 6.砂当量仪校准方法ZT16-11 7.细集料棱角性(流动时间法)测定仪校准方法ZT17-11 8.容量筒校准方法ZT18-11 9.冲击实验仪校准方法ZT19-11 10.亚甲兰试验仪校准方法ZT20-11 三、水泥及水泥混凝土类仪器设备校准方法 1.透气比表面积仪校准方法ZT21-11 2.水泥负压筛析仪校准方法ZT22-11 3.雷氏夹校准方法ZT23-11 4.雷氏沸煮箱校准方法ZT24-11 5.标准养护室校准方法ZT25-11 6.坍落度测定仪校准方法ZT26-11
PH计(PHS-3C)操作步骤及注意事项
PH计(PHS-3C )操作步骤及注意事项 开机前的准备 1、连接仪器:将电极梗旋入电极梗固定座中;将电极夹插入电极梗中;将pH 复合电 极安装在电极夹上; 2、将E-201-C型pH复合电极下端的电极保护套套拔下,并且拉下电极上端的橡皮 套使其露出上端小孔,打开小孔是为了防止产生负压使得离子交换不能正常进行,从而影响测量数据的准确性; 3、用蒸馏水清洗电极。 4、正常使用条件 a)环境温度:(5~40)C; b)相对湿度:不大于85%; c)供电电源:AC 220V; d)除地球磁场外无其他磁场干扰; e)无显著的振动。 5、测量范围:pH: (0.00~14.00) pH ;mV: (0~± 1800)mV 6 最小显示单位:0.01 pH , l mV, 0.1 T 仪器的标定与测量 1、将测量电极插座处拔掉Q9短路插头,在测量电极插座处插入复合电极(本实验室进行操作时,未见到短路插头,测量电极插座与复合电极一直处于连接状 态); 2、打开电源开关,仪器进入pH测量状态; 3、按“温度”键,通过“△”键或“▽”键调节温度显示数值上升或下降,使 温度显示值和溶液温度一致,然后按“确认”键;当接入温度电极时仪器自动进入自动温度补偿,显示的温度即为溶液温度(本实验室未见温度电极)。 4、按“标定”键,此时显示“标定1”“ 4.00 ”及“ mV ,把用蒸馏水或去离子 水清洗过的电极插入pH= 4.00的标准缓冲溶液中,仪器显示实测的mV 值,待mV读数稳定后按“确认”键,仪器显示“标定2”“9.18 ”及“ mV,把用蒸馏水或去离子水清洗过的电极插入pH= 9.18的标准缓冲溶液中,仪器显示实测的mV值,待mV卖数稳定后按“确认”键,标定结束,仪器显示“测量”进入测量状态。 5、用蒸馏水及被测溶液清洗电极后即可对被测溶液进行测量,把电极浸入被测 溶液中,用玻璃棒搅拌溶液,使其均匀,在显示屏上读出溶液的pH值。 注意事项 1、仪器的输入端(测量电极插座)必须保持干燥清洁。仪器不用时,将Q9短路插 头插入插座,防止灰尘及水汽浸入。 2、测量时,电极的引入导线应保持静止,否则会引起测量不稳定。 3、仪器采用了M0S集成电路,因此在检修时应保证电烙铁有良好的接地。 4、电极在测量前必须用已知pH值的标准缓冲溶液进行标定,若连续使用每24h 需要 标定一次。用缓冲溶液标定仪器时,要保证缓冲溶液的可靠性,不能配错缓冲溶液,否则将导致测量结果产生误差。
爱普生机器人原点校准方法
E P S O N机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 3.手动将机械手调整到脉冲零点位置;如下图所示:
+Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图: 4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入: Encreset1按回车 Encreset2按回车 Encreset3按回车
Encreset3,4按回车 如图: 5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图: 6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下: Calpls0,0,0,0回车.如下图: 8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入: calib1按回车1轴 calib2按回车2轴 calib3按回车3轴 calib3,4按回车4轴 (如只需校第一轴,calib1即可,以上将4个轴都校正) 机械手脉冲零点的脉冲保存完成,效正基本完成。 7.保持机械手目前手动零点位置不动,打开机器人管理器,点击motoron后 ,在步进示教可看到如下界面: