GPS测量在水库大坝变形中的应用与分析
GPS测量在水库大坝变形中的应用与分析*
熊 刚1,詹景祥2
(1.广东省地质建设工程集团公司,广东广州510080;
2.广东省地质测绘院,广东广州510080)
摘 要:介绍了水库大坝变形测量的精度要求,应用静态GPS接收机测量水库大坝变形监测基站网,对其精度与误差进行分析,并提出实现毫米级或亚毫米级GPS监测网的措施。
关键词:大坝变形;GPS监测网;基线精化;多路径效应;海潮负荷改正
中图分类号:P258 文献标识码:A 文章编号:1008 9268(2006)06 0029 06
1 前言
土石水库大坝变形测量的内容有:水平位移、垂直位移(沉降与回升)、渗透(浸润线)以及裂隙观测,而前两项涉及基准点(网)测量、基准工作站测量和监测点测量,这三项测量工作对精度要求较高,为大坝变形容许误差的1/10~1/20;而对于上述三项工作的误差一般各分摊三分之一;因此供水平位移监测的基准工作站必须达到毫米级。以往通常采用高精度边角(网)测量;垂直位移要达到毫米级,通常采用精密水准测量。GPS测量能否代替变形基准监测网站的常规测量?精度如何?为此,我们结合台山水库大坝进行了试验,并用TCA1800全站仪(1mm 测距精度的自动照准精密型全站仪)进行检测比对,实践证明GPS测量完全可以取代高精度边角(网)测量。我们根据有关理论对影响精度的原因进行了分析研究,并对影响精度的因素提出相应对策和措施,以保证实现高精度。现将试验结果与分析介绍于后。
2 台山水库大坝情况
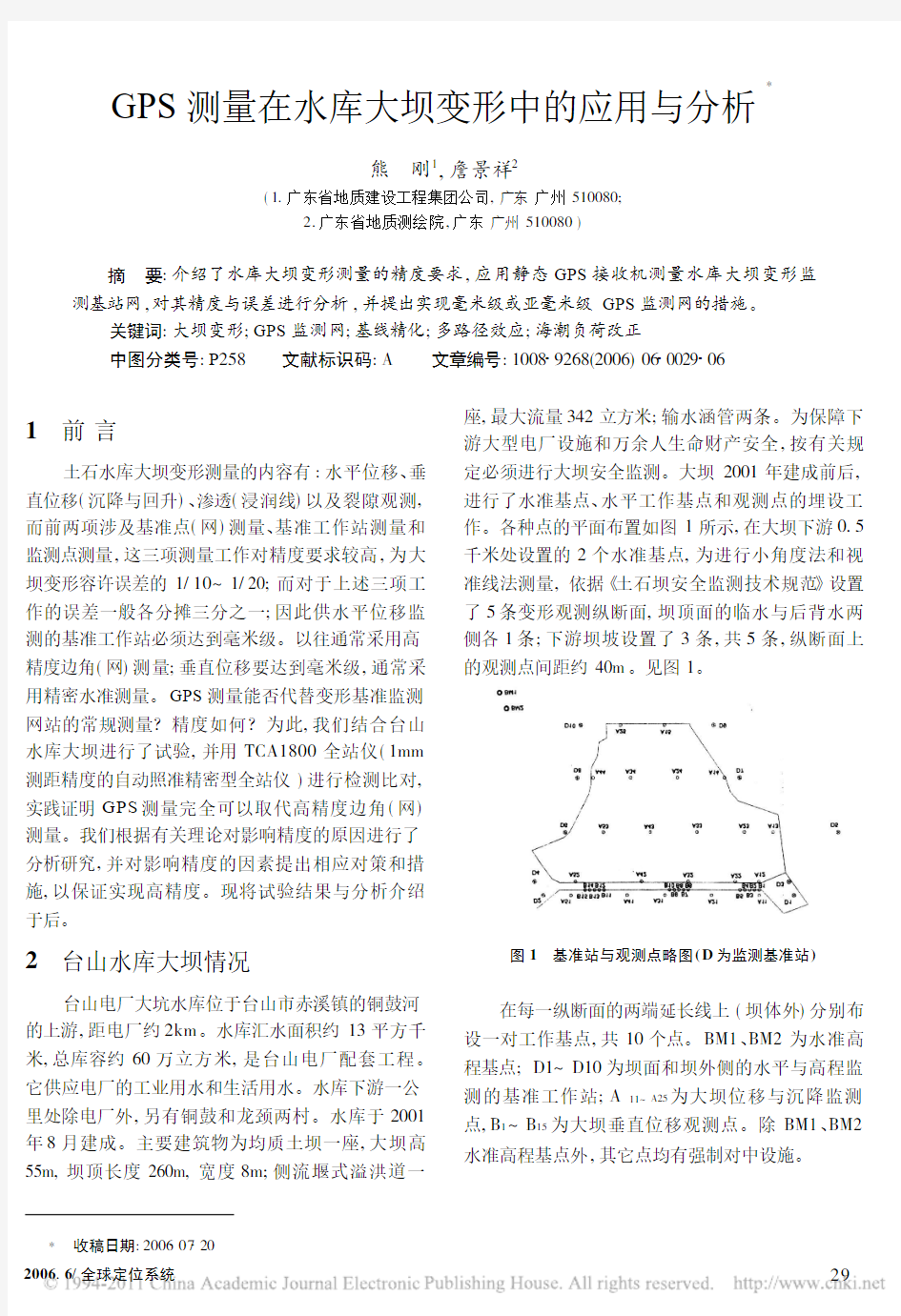
台山电厂大坑水库位于台山市赤溪镇的铜鼓河的上游,距电厂约2km。水库汇水面积约13平方千米,总库容约60万立方米,是台山电厂配套工程。它供应电厂的工业用水和生活用水。水库下游一公里处除电厂外,另有铜鼓和龙颈两村。水库于2001年8月建成。主要建筑物为均质土坝一座,大坝高55m,坝顶长度260m,宽度8m;侧流堰式溢洪道一座,最大流量342立方米;输水涵管两条。为保障下游大型电厂设施和万余人生命财产安全,按有关规定必须进行大坝安全监测。大坝2001年建成前后,进行了水准基点、水平工作基点和观测点的埋设工作。各种点的平面布置如图1所示,在大坝下游0.5千米处设置的2个水准基点,为进行小角度法和视准线法测量,依据《土石坝安全监测技术规范》设置了5条变形观测纵断面,坝顶面的临水与后背水两侧各1条;下游坝坡设置了3条,共5条,纵断面上的观测点间距约40m。见图1
。
图1 基准站与观测点略图(D为监测基准站)
在每一纵断面的两端延长线上(坝体外)分别布设一对工作基点,共10个点。BM1、BM2为水准高程基点;D1~D10为坝面和坝外侧的水平与高程监测的基准工作站;A11~A25为大坝位移与沉降监测点,B1~B15为大坝垂直位移观测点。除BM1、BM2水准高程基点外,其它点均有强制对中设施。
*收稿日期:2006 07 20
3 GPS 基准站监测网测量
我院于2005年进行为时一年12期的监测,并对水平位移图进行了分析,我们于2006年2月25-26日采用GPS 静态测量方法对基准站进行复测。
复测目的有二:1、监测基准站二年后的位移;2、与常规的变形测量方法(边角测量)进行比较,得出GPS 方法的精度,及其是否可达到变形监测要求的结论。
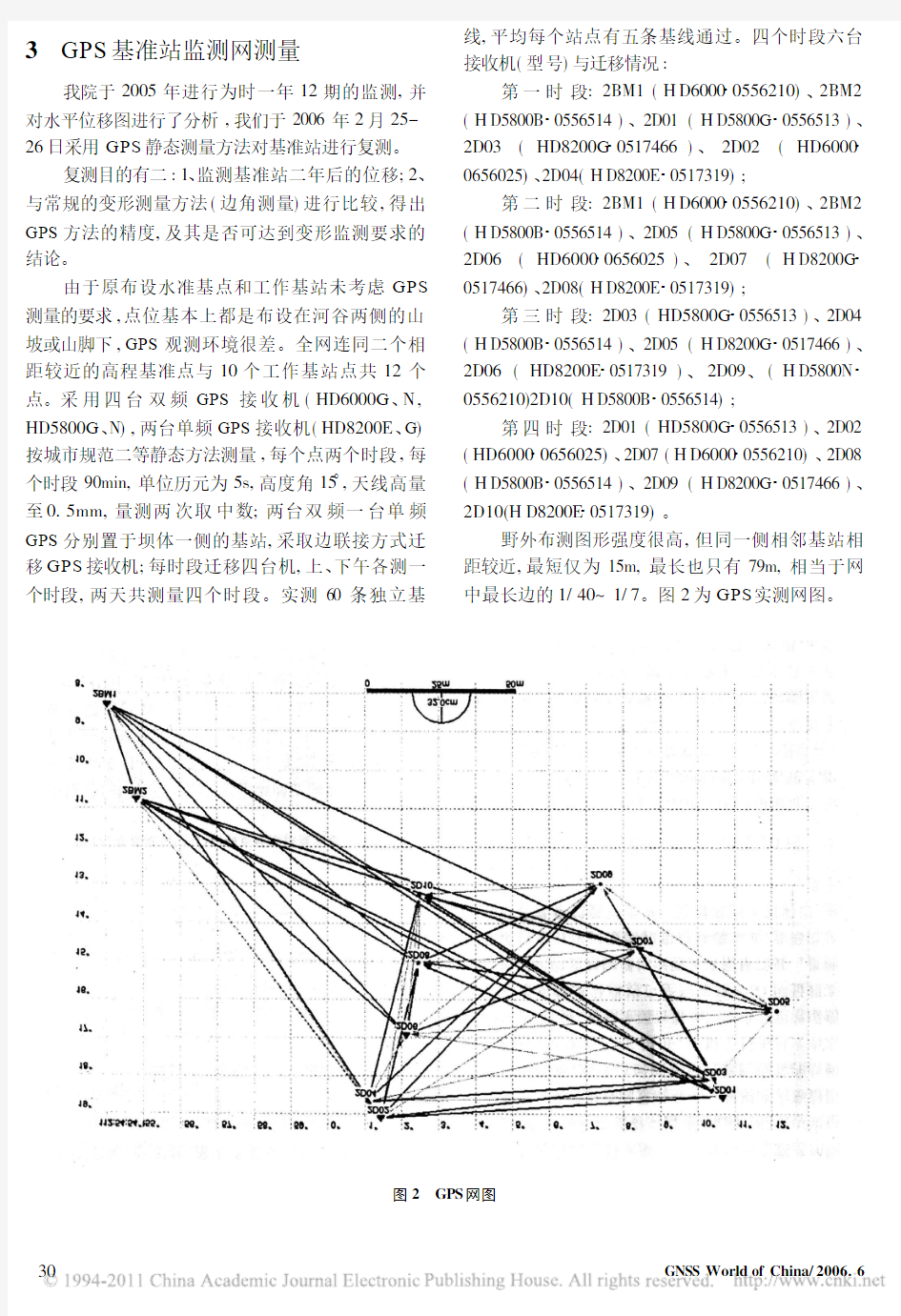
由于原布设水准基点和工作基站未考虑GPS 测量的要求,点位基本上都是布设在河谷两侧的山坡或山脚下,GPS 观测环境很差。全网连同二个相距较近的高程基准点与10个工作基站点共12个点。采用四台双频GPS 接收机(HD6000G 、N,HD5800G 、N),两台单频GPS 接收机(HD8200E 、G)按城市规范二等静态方法测量,每个点两个时段,每个时段90min,单位历元为5s,高度角15 ,天线高量至0.5mm,量测两次取中数;两台双频一台单频GPS 分别置于坝体一侧的基站,采取边联接方式迁移GPS 接收机;每时段迁移四台机,上、下午各测一个时段,两天共测量四个时段。实测60条独立基
线,平均每个站点有五条基线通过。四个时段六台
接收机(型号)与迁移情况:
第一时段:2BM1(H D6000 0556210)、2BM2(H D5800B 0556514)、2D01(H D5800G 0556513)、2D03(HD8200G 0517466)、2D02(HD6000 0656025)、2D04(H D8200E 0517319);
第二时段:2BM1(H D6000 0556210)、2BM2(H D5800B 0556514)、2D05(H D5800G 0556513)、2D06(HD6000 0656025)、2D07(H D8200G 0517466)、2D08(H D8200E 0517319);
第三时段:2D03(HD5800G 0556513)、2D04(H D5800B 0556514)、2D05(H D8200G 0517466)、2D06(HD8200E 0517319)、2D09、(H D5800N 0556210)2D10(H D5800B 0556514);
第四时段:2D01(HD5800G 0556513)、2D02(HD6000 0656025)、2D07(H D6000 0556210)、2D08(H D5800B 0556514)、2D09(H D8200G 0517466)、2D10(H D8200E 0517319)。
野外布测图形强度很高,但同一侧相邻基站相距较近,最短仅为15m,最长也只有79m,相当于网中最长边的1/40~1/7。图2为GPS
实测网图。
图2 GPS 网图
GPS数据后处理时对所有基线逐条进行手工精化解算,90%的方差比R值在80以上,最小为8.7,基线解算中误差RMS最大为5.2mm,平均在3mm 内,边长相对中误差较高,一般都在1/120000以上,个别短边如17m的边长相对中误差也在1/20000以上,其绝对误差为亚毫米。由于原监测网点采用常规的边角测量方法,没有考虑GPS测量对点位的要求,点位都靠近山坡边脚,严重的多路径效应影响基线解的精确性,给同步环与异步环闭合差带来严峻的考检,致使X2与 检验通过困难,在手工精化后删掉了8条误差仅数毫米的基线,但每个点仍然至少有四条以上独立基线通过,从而保证了网的高精度。三维约束后(含大地高)点位中误差,最大为2. 4mm,平均为1.88mm;三维约束后不含大地高,点位中误差最大1.45mm,平均为0.75mm,见表1。
表1 三维坐标及其中误差
点 名纬度(D:M:S)经度(D:M:S)高程(大地高)点位中误差(m)纬度中误差经度中误差高程中误差(m)
2BM121:53:08.29938N112:54:54.03920E35.90940.0024
0.00070.00090.0021
BM221:53:10.76559N112:54:54.82506E36.56950.0014
0.00040.00050.0012
2D0121:53:18.53112N112:55:10.65956E63.06970.0018
0.00040.00050.0017
2D0221:53:19.10322N112:55:01.43521E63.17260.0019
0.00050.00050.0017
2D0321:53:18.07752N112:55:10.45597E63.13050.0015
0.00040.00050.0014
2D0421:53:18.65883N112:55:01.08197E63.11050.0023
0.0010.00090.0018
2D0521:53:16.29599N112:55:12.14169E61.03710.0025
0.00090.00120.0019
2D0621:53:16.91734N112:55:02.11365E46.61640.0019
0.00070.00090.0016
2D0721:53:14.65935N112:55:08.44575E37.49240.0015
0.00040.00070.0013
2D0821:53:15.03091N112:55:02.44965E33.35170.0013
0.00040.00050.0011
2D0921:53:12.94251N112:55:07.39951E25.65610.0014
0.00040.00050.0013
2D1021:53:13.24960N112:55:02.49227E22.72980.0022
0.00060.00090.0019
二维约束平差后边长相对中误差一般都在1/ 50000以上,最短边的相对中误差也在1/20000以上,但绝对边长的中误差仍达到了亚毫米级精度。二维约束采用原独立控制网三个点约束后,点位精度平均为1.17mm,最大为1.6mm,见表2。
表2 二维约束后平面坐标及其中误差与原坐标较差
点名x x中误差(m)y y中误差(m)点位中误差(m)
2BM13091.70370.0035106.58730.00410.0054
无原坐标
2BM23167.39540.0027129.68990.00320.0041
无原坐标
2D013402.98180.002585.94690.00240.0032
原坐标/较差3402.98580.004585.94320.00370.0054
2D023422.47590.0021321.28170.00210.003
点名x x中误差(m)y y中误差(m)点位中误差(m)原坐标/较差342247420.0037321.28210.00040.0038 2D033389.07470.0022580.00090.00260.0034原坐标/较差338908130.0066580.00480.00370.0076 2D043408.87890.0019311.0440.00190.0027原坐标/较差340887680.0021311.04350.00150.0026 2D053333.92870.0035628.00360.00430.0056原坐标/较差3333.93410.0054627.99930.00430.0069 2D063355.1048*****340.2714**********
原坐标/较差起算点
2D073284.35370.0024521.54140.00310.0039原坐标/较差3284.3570.0033521.54120.00020.0033 2D083297.0156*****349.5023**********
原坐标/较差起算点
2D093231.7643*****491.1327**********
原坐标/较差起算点
2D103242.21670.0015350.33640.00170.0022原坐标/较差3242.21890.0022350.32170.01470.0149
为了进行边长比较,该期GPS监测网采用了多种投影面进行约束处理,并与精密实测边长和原三边测量边作了比较,比较情况见表3。表中 原三边测量 投影面无记录,采用克氏椭球面北京54坐标系;表中 GPS原坐标系 以原三边测量坐标约束(为了与原坐标比较,采用原坐标系与投影面); GPS WGS84系 采用WGS84坐标系椭球面; GPS坝区重心系 ,采用当地工程椭球面坐标系。最小约束后,点位精度平均为1.320mm,最大为2.7mm;采用徕卡的高精度测距全站仪(1mm+1-6、测距精度,1秒测角精度,自动精确照准、读数)的实测边长(与GPS在同一天观测)与各种模式的边长数据进行对比,其中与原三边测量边较差最大,说明原三边测量精度较差或者点位有平移;与工程椭球坝区重心系对比较好,最大边长较差2.5mm,最小0.6mm,平均较差仅为1.5mm。如视同等精度比较,则除以2为实际精度,中误差达到或接近亚毫米级精度,远高于常规边角网精度,完全满足大坝变形基准控制网的高精度要求。
表3 GPS各种投影与坐标系之边长与精密测距比较表
基点边名精密测距1mm原三边测量GPS原坐标系GPS WGS84系GPS坝区重心系D1~D2265.3793265.3776265.3815265.3809265.3813
D3~D4269.6859269.6888269.6866269.6861269.6865
D5~D6288.5058288.5057288.5039288.5037288.5043
D7~D8172.5058172.5041172.5062172.5059172.5064
D9~D10141.1843141.1986141.1867141.1863141.1865
监测大坝垂直位移通常采用大地高,但为检核基准测网站点一年后的垂直相对位移,采用原网二个高程基准点和10个基准监测网站点(采用二等水准联测)高程进行比较,采用二次水准测量较差5mm以内的6个可靠的点进行曲面拟合,内符合残差最大为1.9mm;二准点间的大地高差与水准高差之差相差仅0.6mm。可见大地高、正常高是兼容的。但拟合后与未参拟合起算的原水准联测点高程一般相差3~4cm,其中误差详见表4。其主要原因在本文第4节中进行讨论。
表4 高程拟合后中误差表
点 名高程中误差原水准高程(m)
2BM128.9118〈已知〉
2BM229.5713〈已知〉
2D0156.0625〈已知〉
2D0256.1775〈已知〉
2D0356.130.001456.169
2D0456.11560.001856.1484
2D0554.09710.001953.9983
2D0639.6085〈已知〉
2D0730.541〈已知〉
2D0826.34970.001126.3368
2D0918.73030.001318.6999
2D1015.74370.001915.7747
4 GPS监测网高程精度分析
通过本工程实践与分析,我们有以下体会与认识:
实践证明GPS水库大坝监测边长较短,监测网按城市二等GPS测量精度要求作业,完全可以达到毫米级甚至亚毫米级精度,可以替代繁锁的常规边、角测量,实现高于常规测量精度的目标。并具有以下特点:
1)网点之间无需通视,监测基准站布设更灵活;
2)基准点可设置在坝体与库区较远和更稳定的地点;
3)双频接收机对于小范围短距离的大坝监测网,没有消除电离层误差影响的优势,相反对多路径效应更为敏感,因一个频率的问题不得不删掉不必要删掉的另一频率观测数据,对基线解算有害无益。因此采用单频接收机完全可以解决大坝监测网的需要。而单频接收机的仪器费用相对较少(数量4台,约四万多元左右);
4)静态GPS操作简单,效率高,精度较常规仪器更容易保证。
5)此次水库大坝监测网的三维与二维坐标的平面精度很高,二准点间的大地高差与水准高差之差相差仅0.6mm(详见表1与表3原始数据),但以大地高拟合后的正常高与原水准高程比较相差稍大,其原因除原水准点位置相距较近且位于一侧外,主要是多路径效应与潮汐修正的影响。
5 保证监测网高精度应注意的问题与
要采取的措施
1)基线精化
基线精化是静态GPS后处理与保证基线高精度的重要关键,也是保证各项检验通过的重要环节,必须逐条基线精益求精的处理,不能满足一般符合限差的规定,因为要达到毫米或亚毫米级精度就是在基线处理中的毫米之 争 。
2)大地高代替正(常)高进行垂直位移监测
大地高是以橢球面起算在法线上度量的几何高,正(常)高是以(似)大地水准面起算在垂线上度量的物理高。两者之间相差一个 高程异常(或N 大地水准面)差值。但对于水库形变测量,采用大地高较正(常)高更有利,一是大坝监测仅是了解监测点相对某个基面相关高程,与重力场无关,又不需要高程作其它用途,因此不需转换为正(常)高。由于不考虑与重力有关 高程异常(或N)的变化,減少了转换误差,精度更高,因此变形观测的垂直位移以GPS方法测量应采用大地高为好。本项目为了与水准高程进行比较,采用曲面拟合求出正常高,从表中看出大地高精度远远大于GPS分量(X、Y、H)的1 2 4的比例,精度较差。其原因是下面要分析的多径效应和海潮影响所致。
3)多径效应问题
监测基准点应尽量选在远离山坡和多路径影响较小的地点。据文献1的理论和大量资料的分析与研究,认为小于10km边的主要误差是多径效应引起的误差,一般情况下为 1~5cm,在高反射环境下(山坡、大河、湖泊、海洋 )可达 19cm。本次试验,高程拟合范围不足1平方km,高程异常差甚微,大地高的(表面)误差也很小,水准为二等精度较高,其分布位置也很好,但拟合后的高程内符合误差以及与实测水准高程比较,较差在3cm左右,完全证实文献1的理论与资料分析。因此大坝监测网点位的选设必须充分重视,否则高程精度远低于平面精度,只能达到厘米级,不是平面精度的2~3倍的毫米级,因此监测基准与监测工作基站应避免选在山坡与山脚下,确实难以避免时,应选用抗多径效应好的天线或扼流圈天线。在缺乏上述条件情况下,每次有效的观测时段应大于多径效应的周期长度,即不得少于30min而不是规范规定的15min;最好适当延长观测时间,并将观测时段均匀分布在一天的不同时间段。GPS大地高测量替代毫米级水准正(常)高测量,对大坝垂直位移监测精度与可行性有待进一步试验。
4)海潮影响与改正
从表3所列高程比较可以看出:高程精度低于平面精度,除了上述多径效应的影响外,还由于大坝与海边相距不足2km,海潮负荷影响较大。据文献2阐述的海潮是指在日月等天体引力作用下实际海面相对于平均海平面的周期涨落变化。根据海潮负荷改正原理和文献实际算例说明,海潮对高精度GPS的影响在1-5cm,主要反映在垂直量即高程上,不容忽视。我们由于缺乏海潮系数和软件,未能加入此项改正,使网的高程精度受到一定影响,也是本监测网高程精度不尽人意的原因之一。为了避免或减少海潮影响的一个办法是将观测时段分配在一个24h内,可以在很大程度上消除周日潮汐影响。但这就加大了观测工作量。
5)为了避免天线相位高的不同而引起的误差,
尽量采用相同品牌与同类型的仪器。
6)基准点与基准监测站点必须具有强制对中设施,减少对中误差对点位精度和数据处理的影响。
7)天线高量取保证达到0.5mm以上精度,否则不仅影响高程精度,更重要是由于边长相对较短,难以保证 检验和异步环检验顺利通过,给基线精化处理通过检验造成困难,因而不得不删掉不必要的基线,削弱了网的精度。
6 结 语
综上所述,不低于二等精度的GPS控制网,应用在短边监测网如水库大坝监测中,完全可以替代常规边、角监测网,而且可以取得毫米甚至亚毫米级精度的绝对平面位移与相对垂直监测数据;在有条件(解决多径效应,如采用扼流圈天线)的情况下,小范围内以大地高取代高精度的水淮测量的正常高也是有可能的。这有待选择多径效应小和远离海边海潮负荷改正小的地区,进行变形监测网的GPS实践来进一步验证。
感谢高级工程师束焕然给予本次工程(广东台山大坑水库大坝)监测的指导。
参考文献
[1] 李青岳 工程测量[M],测绘出版社,1984.6
[2] 谢世杰,等.论GPS测量中的多径误差[J]。测绘通
报,2003,(5):1~5
[3] 赵庆海,等.海潮对高精度GPS网的影响[J]。中国全
球定位系统技术应用协会第八次年会论文集2005.12 187~189
作者简历:熊 刚 (1971-),男,华东地质学院工程测量专业本科毕业,学士学位;广东省地质建设工程集团公司测量技术负责人、工程师;主要从事GPS 大地测量、地质、地形、工程测绘、城市建筑变形监测等工作。
Application and Analysis for the G PS S urveying
in the Reservoir Dam Deformation
X ION G Gang1,ZHAN Jing xiang2
(1.Geological Construction Engineer ing Gr oup Cor p oration of GuangD ong Province,
Guangdong Guangz hou510080;2 I nstitute of Geological Sur vey ing&M ap p ing
of GuangDong Pr ovince,Guangdong Guangz hou510080).
A bstract:T his paper briefly discussed the required accuracy about reservoir dam deformation surveying,and the analysed precision and error of the reservoir dam deformation measurent of the base station network by static GPS receiver.Finally put forw ard some measures for achieving minimeter level accuracy monitor netw ork.
Key w ord s:Dam deformation;GPS monitor network;base line precisization;multipath effect;tide burthen correction.
GNSS系统
Trimble公司新近推出一种名为Trimble R8GNSS系统。该系统是一种多通道、无线电数据链和多频GNSS接收机,它由一加强型实时动态测量引擎驱动。Trimble R跟踪技术可踪踪新式的GPS L2C和L5信号,并可跟踪GLONASS L1/L2信号。它还可根据测绘工作的需要,用作基站或流动站。该系统机内设有一个450MH z的无线电装置,它可用作一无线基站,内置的GSM/GPRS选择方案可供互联网使用。机上的450MH z无线电装置也可用作Trimble虚拟参考站网络的流动站。该系统采用一个先进的Trimble麦克斯韦常规测绘的GNSS芯片和一个供GNSS伪随机测量使用的高精度多路相关器。
水库大坝表面变形自动化监测新技术
水库大坝表面变形自动化监测新技术 徐忠阳 (索佳公司北京代表处,北京 100004) 一、引言 有关资料标明,我国河川年径流量总量约2780Gm3,水能资源十分丰富,其中理论蕴藏量为676GW,可开发为378GW,为世界第一位。为了充分利用这些水利和水能资源,新中国刚成立时,政府就十分注意兴修水利,造福人类,到目前已建水库堤坝约8.7万座,其中绝大部分(约8万座)建于20世纪50~70年代。但是,由于历史原因,有相当部分水库堤坝未按基本程序办事,是靠群众运动建造的,因此存在工程质量差、安全隐患多的问题。经过几十年的运行,已经到了病险高发期。 水利工程即可以造福人类,如管理不善也会给社会带来惨重灾难和巨大的经济损失。历史上因水库溃坝给下游造成的毁灭性灾难并不鲜见。因此加强水库大坝的安全管理必不可少,其中大坝变形监测就是大坝安全管理的重要内容之一。 二、目前水库大坝变形监测的主要技术手段 目前,在大坝安全监测技术规范中,主要有《土石坝安全监测技术规范》和《混泥土坝安全监测技术规范》。 1、土石坝安全监测技术简介 在《土石坝安全监测技术规范》中,把大坝的变形监测内容分为:表面变形、内部变形、裂缝及接缝、混泥土面板变形及岸坡位移。 大坝表面变形监测主要分为竖向位移监测和水平位移监测。 (1)竖向位移监测的方法主要是精密水准法,或连通管(静力水准)法; (2)水平位移又分为横向(垂直坝轴线)位移和纵向(平行于坝轴线)位移。 a. 横向位移的监测方法主要是视准线法(活动标法、小角法、大气激光准直法等);有必要且有条件时,可用三角网前方交会法观测增设工作基点(或位移测点)的横向水平位移。 b. 纵向水平位移观测,一般用因钢尺测量,或用普通钢尺加改正系数,有条件时可用光电测距仪测量。 (3)混泥土面板变形及岸坡位移监测的技术方法与大坝表面变形监测基本相同。 2、混泥土坝安全监测技术简介 《混泥土坝安全监测技术规范》规定:变形监测项目主要有坝体变形、裂缝、接缝以及坝基变形、滑坡体及高边坡的位移等。 (1)坝体、坝基、滑坡体及高边坡的水平位移监测 a. 重力坝或支墩坝坝体和坝基水平位移一般采用引张线法、真空激光准直法和垂线法监测。对于短坝,条件有利时也可用视准线法或大气激光准直法。
大坝变形监测施工与观测方法及要求
大坝变形监测施工与观测方法及要求 1.技术标准和规范: 承建工程变形监测仪器设备的检验、率定、埋设安装与施工期观测,应严格执行现行国家行业技术标准和规范,以及设计文件、承包合同要求。应执行的现行国家行业技术标准和规范主要有(但不限于): (1)《混凝土大坝安全监测技术规范》(SDJ336—89) (2)《土石坝安全监测技术规范》(SL60—94) (3)《国家一、二等水准测量规范》(GB12897—91) (4)《国家三角测量规范》(GB/T17942-2000) (5)《水利水电工程测量规范》(SL197—97) (6)《水利水电工程施工测量规范》(SL52—93) 2.变形监测仪器设备购置、加工: 变形监测仪器设备购置、加工应按照经监理工程师批准的设计图纸、仪器设备清单进行。仪器设备购置、加工前应向监理工程师报送:(1)仪器设备购置、加工计划:(2)仪器设备检验、率定计划。仪器设备运抵施工现场后,应会同监理工程师开箱检查验收,应向仪器设备供应方索取仪器设备出厂合格证,计量检测证。仪器、设备检验合格后应妥善保管。 3.倒垂孔、钢管标、钢铝管双金属标造孔施工与埋设安装: 倒垂孔、钢管标、钢铝管双金属标应在施工部位形成后进行。按照设计坐标、高程进行钻孔孔位定位、放样。钻机就位,应认真进行校正。经校正安装固定的钻机,主轴必须严格垂直,钻孔孔位定位精度须满足设计要求。钻孔施工过程中应每进尺1 m~2m,采用倒垂浮体组配合弹性导中器进行钻孔垂直度检测,以控制钻孔质量,进而指导调整钻孔施工。倒垂孔钻孔垂直度应满足保护管安装埋设完成后,其保护管有效孔径必须在大于100mm。钢管标、钢、铝管双金属标钻孔垂直度应满足保护管安装埋设的要求。 钻孔进尺满足设计要求后,应通知设计、地质、监理工程师,参加钻孔终孔验收,并进行单项工程阶段性验收签证。终孔验收后,及时进行倒垂孔保护管、
《GPS测量原理及应用》武大第三版-复习资料
第一章绪论 1. GPS系统包括三大部分:空间部分——GPS卫星星座,地面控制部分——地面监控系统,用户设备部分——GPS信号接收机。 2 .GPS卫星星座部分:由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,记作(21+3)GPS星座。24颗在轨卫星均匀分布在6个轨道平面内,轨道倾角为55°,各个轨道平面之间相距60°。在地球表面上任何地点任何时刻,在高度角15°以上,平均可同时观测到6颗卫星,最多可达9颗卫星。 3. GPS卫星的作用:第一,用L波段的两个无线载波向广大用户连续不断地发送导航定位信号。第二,在卫星飞越注入站上空时,接收由地面注入站用S波段发送到卫星的导航电文和其他有关信息,并通过GPS信号电路,适时地发送给广大用户。第三,接收地面主控站通过注入站发送到卫星的调度命令,适时地改正运行偏差或启用备用时钟等。 4. 地面监控系统:1个主控站(美国科罗拉多)3个注入站(阿森松岛,迪哥加西亚岛,卡瓦加兰)5个监控站(1+3+夏威夷) 5. GPS信号接收机的任务是:能够捕获到按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置,甚至三维速度和时间。 6. GPS系统的特点:定位精度高,观测时间短,测站间无需通视,可提供三维坐标,操作简便,全天候作业,功能多,应用广。 7. GPS系统的应用前景:①用于建立高精度的国家性大地测量控制网,测定全球性的地球动态参数②用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘③用于监测地球板块运动状态和地壳形变④用于工程测量,成为建立城市与工程控制网的主要手段⑤用于测定航空航天摄影瞬间的相机位置. 8. 我国的GPS定位技术的应用和发展情况:在大地测量方面,利用GPS技术开展国际联测,建立全球性大地控制网,提供高精度的地心坐标,测定和精化大地水准面;在工程测量方面,应用GPS静态相对定位技术,布设精密工程控制网,用于城市和矿区油田地面沉降监测、大坝变形监测、高层建筑变形监测、隧道贯通测量等精密工程;在航空摄影测量方面,我国测绘工作者也应用GPS技术进行航测外业控制测量、航摄
大坝变形监测施工与观测方法及要求
(一)大坝变形监测施工与观测方法及要求 1.技术标准和规范: 承建工程变形监测仪器设备的检验、率定、埋设安装与施工期观测,应严格执行现行国家行业技术标准和规范,以及设计文件、承包合同要求。应执行的现行国家行业技术标准和规范主要有(但不限于): (1)《混凝土大坝安全监测技术规范》(SDJ336—89) (2)《土石坝安全监测技术规范》(SL60—94) (3)《国家一、二等水准测量规范》(GB12897—91) (4)《国家三角测量规范》(GB/T17942-2000) (5)《水利水电工程测量规范》(SL197—97) (6)《水利水电工程施工测量规范》(SL52—93) 2.变形监测仪器设备购置、加工: 变形监测仪器设备购置、加工应按照经监理工程师批准的设计图纸、仪器设备清单进行。仪器设备购置、加工前应向监理工程师报送:(1)仪器设备购置、加工计划:(2)仪器设备检验、率定计划。仪器设备运抵施工现场后,应会同监理工程师开箱检查验收,应向仪器设备供应方索取仪器设备出厂合格证,计量检测证。仪器、设备检验合格后应妥善保管。 3.倒垂孔、钢管标、钢铝管双金属标造孔施工与埋设安装: 倒垂孔、钢管标、钢铝管双金属标应在施工部位形成后进行。按照设计坐标、高程进行钻孔孔位定位、放样。钻机就位,应认真进行校正。经校正安装固定的钻机,主轴必须严格垂直,钻孔孔位定位精度须满足设计要求。钻孔施工过程中应每进尺1 m~2m,采用倒垂浮体组配合弹性导中器进行钻孔垂直度检测,以控制钻孔质量,进而指导调整钻孔施工。倒垂孔钻孔垂直度应满足保护管安装埋设完成后,其保护管有效孔径必须在大于100mm。钢管标、钢、
GPS测量原理及应用题库
G P S测量原理及应用题 库 Revised final draft November 26, 2020
GPS 一、单选题 1、GPS卫星星座配置有( D )颗在轨卫星。 A. 21 B. 12 C. 18 D. 24 2、UTC是指( C )。 A. 协议天球坐标系 B. 协议地球坐标系 C. 协调世界时 D. 国际原子时 3、AS政策是指( D )。 A. 紧密定位服务 B. 标准定位服务 C. 选择可用性 D. 反电子欺骗 4、GPS定位中,信号传播过程中引起的误差主要包括大气折射的影响和( A )影响。 A. 多路径效应 B. 对流层折射 C. 电离层折射 D. 卫星中差 5、一般地,单差观测值是在( A )的两个观测值之间求差。 A. 同卫星、同历元、异接收机 B. 同卫星、异历元、异接收机 C. 同卫星、同历元、同接收机 D. 同卫星、异历元、异接收机 6、双差观测方程可以消除( D )。 A. 整周未知数 B. 多路径效应 C. 轨道误差 D. 接收机钟差 7、C/A码的周期是( A )。 A. 1ms B. 7天 C. 38星期 D. 1ns
9、在GPS测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。 A、几何中心 B、相位中心 C、点位中心 D、高斯投影平面中心 10、岁差和章动旋转变换是用于哪两个坐标系之间的转换( A )。 A、瞬时极天球坐标系与平天球坐标系 B、瞬时极天球坐标系与平地球坐标系 C、瞬时极天球坐标系与瞬时极地球坐标系 D、平天球坐标系与平地球坐标系 11、GPS定位的实质就是根据高速运动的卫星瞬间位置作为已知数据,采用(A )的方法,确定待定点的空间位置。 A、空间距离后方交会 B、空间距离前方交会 C、空间角度交会 D、空间直角坐标交会 12、根据GPS定位原理,至少需要接收到(B )颗卫星的信号才能定位。 A、5 B、4 C、3 D、2 13、在以下定位方式中,精度较高的是(C )。 A、绝对定位 B、相对定位 C、载波相位实时差分 D、伪距实时差分 14、GPS技术给测绘界带来了一场革命,下列说法不正确的是(A) A、利用GPS技术,测量精度可以达到毫米级的程度 B、与传统的手工测量手段相比,GPS技术有着测量精度高的优点 C、GPS技术操作简便,仪器体积小,便于携带
GPS测量原理与应用题库完整
一、单选题(在本题的每一小题的备选答案中,只有一个答案是正确的,请把你认为正确答案的题号,填入题干的括号内。多选不给分。每题2分,共20 分)。 1、GPS卫星星座配置有( D )颗在轨卫星。 A. 21 B. 12 C. 18 D. 24 2、UTC是指(C )。 A. 协议天球坐标系 B. 协议地球坐标系 C. 协调世界时 D. 国际原子时 3、AS政策是指( D )。 A. 紧密定位服务 B. 标准定位服务 C. 选择可用性 D. 反电子欺骗 4、GPS定位中,信号传播过程中引起的误差主要包括大气折射的影响和( A )影响。 A. 多路径效应 B. 对流层折射 C. 电离层折射 D. 卫星中差 5、一般地,单差观测值是在(A )的两个观测值之间求差。 A. 同卫星、同历元、异接收机 B. 同卫星、异历元、异接收机 C. 同卫星、同历元、同接收机 D. 同卫星、异历元、异接收机 6、双差观测方程可以消除( D )。 A. 整周未知数 B. 多路径效应 C. 轨道误差 D. 接收机钟差 7、C/A码的周期是( A )。
A. 1ms B. 7天 C. 38星期 D. 1ns 9、在GPS测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。 A、几何中心 B、相位中心 C、点位中心 D、高斯投影平面中心 10、岁差和章动旋转变换是用于哪两个坐标系之间的转换(A )。 A、瞬时极天球坐标系与平天球坐标系 B、瞬时极天球坐标系与平地球坐标系 C、瞬时极天球坐标系与瞬时极地球坐标系 D、平天球坐标系与平地球坐标系 1.GPS广播星历中不包含…………………………………………………………() GPS卫星的六个轨道根数GPS观测的差分改正 GPS卫星钟的改正GPS卫星的健康状态 2.以下哪个因素不会削弱GPS定位的精度………………………………………() 晴天为了不让太阳直射接收机,将测站点置于树荫下进行观测 测站设在大型水库旁边 在SA期间进行GPS导航定位 夜晚进行GPS观测 3.GPS卫星之所以要发射两个频率的信号,主要目的是………………………
《GPS测量原理及应用》题库
GPS 一、单选题 1、GPS卫星星座配置有( D )颗在轨卫星。 A. 21?B. 12 C. 18 D. 24 2、UTC是指( C )。 A. 协议天球坐标系B.协议地球坐标系 C.协调世界时?D. 国际原子时 3、AS政策是指( D )。 A. 紧密定位服务?B.标准定位服务 C.选择可用性???D. 反电子欺骗 4、GPS定位中,信号传播过程中引起的误差主要包括大气折射的影响和( A)影响。 A. 多路径效应 B. 对流层折射 C. 电离层折射?D.卫星中差 5、一般地,单差观测值是在(A )的两个观测值之间求差。 A. 同卫星、同历元、异接收机?B.同卫星、异历元、异接收机 C. 同卫星、同历元、同接收机?? D. 同卫星、异历元、异接收机 6、双差观测方程可以消除( D )。 A. 整周未知数? B. 多路径效应 C. 轨道误差?? D. 接收机钟差 7、C/A码的周期是( A )。 A.1ms? B. 7天?C. 38星期?D. 1ns 9、在GPS测量中,观测值都是以接收机的( B)位置为准的,所以天线的相位中心应该与其几何中心保持一致。 A、几何中心 B、相位中心 C、点位中心D、高斯投影平面中心 10、岁差和章动旋转变换是用于哪两个坐标系之间的转换( A )。 A、瞬时极天球坐标系与平天球坐标系 B、瞬时极天球坐标系与平地球坐标系 C、瞬时极天球坐标系与瞬时极地球坐标系 D、平天球坐标系与平地球坐标系 11、GPS定位的实质就是根据高速运动的卫星瞬间位置作为已知数据,采用(A )的方法,确定待定点的空间位置。 A、空间距离后方交会?B、空间距离前方交会 C、空间角度交会? D、空间直角坐标交会 12、根据GPS定位原理,至少需要接收到(B )颗卫星的信号才能定位。
GPS测量原理及应用
《GPS测量原理及应用》学习指导 一、控制网执行的技术标准 1、全球定位系统(GPS)测量规范(GB/T 18314—2001),中华人民共和国国家标准; 2、《国家三、四等水准测量规范》(GB12898-1991),中华人民共和国国家标准; 3、技术设计书。 二、使用仪器 测量采用的GPS接收机型号及其标称精度。 三、布网方案 1、布网要求 GPS网相邻点间基线中误差按下式计算: 式中(mm)为固定误差;(ppm)为比例误差系数;(km)为相邻点间的距离。GPS-E级网的主要技术要求应符合表1规定。相邻点最小距离应为平均距离的1/2~1/3;最大距离应为平均距离的2~3倍。 (mm) (1×10-6)
注:当边长小于200m时,边长中误差应小于20mm。 2、布网原则与网形设计 (1)GPS网应根据测区实际需要和交通状况进行设计。GPS网的点与点间不要求每点 (4)为求定GPS点在54北京坐标系中的坐标,应与当地54北京坐标系中的原有控制点联测,联测总点数不得少于3个。 (5)为了求得GPS网点正常高,应进行水准测量的高程联测,高程联测采用等级水准测量方法进行,联测的GPS-E级控制点且应均匀分布于网中。
四、选点与标石埋设 1、选点 在了解任务、目的、要求和测区自然地理条件的基础上,进行现场踏勘,最后进行选点。选点应符合下列要求: (1)点位的选择应符合技术设计要求,并有利于其它测量手段进行扩展与联测; (2)点位的基础应坚实稳定,易于长期保存,并应有利于安全作业; (3)点位应便于安置接收设备和操作,视野应开阔,视场内周围障碍物的高度角一般应小于15°; (4)点位应远离大功率无线电发射源(如电视台、微波站等),其距离不得小于200m,并应远离高压输电线其距离不得小于50m,以避免周围磁场对卫星信号的干扰; (5)点位附近不应有对电磁波反射(或吸收)强烈的物体,以减少多路径效应的影响; (6)交通应便于作业,以提高作业效率; (7)应充分利用符合上述要求原有的控制点及其标石,但利用旧点时应检查旧点的稳定性、完好性,符合要求方可利用; (8)选好点后应按合理的方法给GPS点编号。 此外,有时还需考虑测区内的通讯设施、电力供应等情况,以便于各点之间的联络和设备用电或充电。 综上所述,结合测区的实际情况, GPS控制点宜布设在较高的永久性建筑物、山顶及其它符合要求的地方,或已成型的较宽的城市主干道、路口或其它较开阔而又稳固的建(构)筑物上。
探讨大坝坝体变形监测的技术方法
探讨大坝坝体变形监测的技术方法 发表时间:2020-04-14T01:59:35.586Z 来源:《建筑细部》2019年第21期作者:吴康翔[导读] 通过介绍大坝坝体变形监测的传统测量技术方法和GNSS测量技术方法,说明不同方法的特性和得到大坝坝体变形点坐标数据的过程。以GNSS测量技术方法为例,叙述了某大坝坝体变形监测的周期和采用的具体技术手段,对大坝坝体变形点的坐标数据进行了分析,得到某大坝坝体的变形状态。 吴康翔 深圳市深水水务咨询有限公司 518000 摘要:通过介绍大坝坝体变形监测的传统测量技术方法和GNSS测量技术方法,说明不同方法的特性和得到大坝坝体变形点坐标数据的过程。以GNSS测量技术方法为例,叙述了某大坝坝体变形监测的周期和采用的具体技术手段,对大坝坝体变形点的坐标数据进行了分析,得到某大坝坝体的变形状态。大坝坝体在建设和运营过程中,由于种种不利因素的影响,使得大坝坝体的质量问题受到威胁。为了及时得到大坝坝体的安全现状,需要采用科学的技术手段,对其进行变形监测。通过对变形数据的监测和分析,得出大坝坝体的水平位移量和垂直位移量,来预测大坝坝体的变形趋势,为管理者提供决策依据。从GPS在水库大坝变形监测中的应用特点入手,对其应用特点作了细致的梳理和阐述。接下来,特别地对于GPS技术在大坝变形监测中的精度影响因素作了具体分析。最后,分步骤详细阐述GPS技术在水库大坝监测领域的具体实施方法,并且对GPS技术的未来的发展和趋势。 关键词:大坝变形监测;位移量;监测点 大坝是一种特殊建筑物,其特殊性主要表现在如下3个方面:1.投资及效益的巨大和失事后造成灾难的严重性;2.结构、边界条件及运行环境的复杂性;3.设计、施工、运行维护的经验性、不确定性和涉及内容的广泛性。 以上特殊性说明了要准确了解大坝工作性态,只能通过大坝安全监测来实现,同时也说明了大坝安全监测的重要性。 随着科学技术的发展、管理水平的提高及人们观念的转变,大坝安全监测的内涵也进一步加深。大坝安全监测重在评价大坝安全,还有校核设计、改进施工和评价大坝安全状况作用。大坝安全监测的浅层意义是为了人们准确掌握大坝性态;深层意义则是为了更好地发挥工程效益、节约工程投资。大坝安全监测不仅为了被监测坝的安全评估,还有利于为今后除险加固工程设计提供原型观测资料。 一、大坝坝体变形监测的技术方法 1.1传统的测量技术方法 在大坝坝体变形监测传统的测量技术方法中,先是在坝体的主轴线周围选择基准点和变形点,共同构成监测点,然后将监测点布设成边角网,借助全站仪周期性观测边角网中的角度和距离,推算变形点的平面坐标,分析出变形点位的水平位移量数值;通过精密水准测量的手段周期性观测大坝变形点,计算出变形点位的垂直位移量数值。根据水平位移量和垂直位移量的大小,最后判断大坝坝体的变形情况。 如图1所示的大坝坝体变形监测边角网,其中K01、K02、K03、K04、K05为基准点,B01、B02、B03为变形点,通过传统的测量技术方法,可以完成大坝坝体变形监测的任务。但是,变形监测传统的测量技术方法,外业观测的工作量大、效率低和成本高,内业数据计算麻烦、处理过程复杂,因此,逐渐被其他的变形监测方法所替代。
GPS测量原理与应用期末考试复习
GPS测量原理及应用期末考试复习 第一章绪论 1.简述GPS系统的特点有哪些? ①定位精度高②观测时间短③测站间无需通视④可提供地心坐标 ⑤操作简便⑥全天候作业⑦功能多、应用广 2.GPS定位系统由哪几部分组成的?各部分的作用是什么? 整个GPS系统,它包括三部分: (1)空间部分—GPS卫星及其星座(2)地面控制部分—地面监控系统(3)用户设备部分—GPS信号接收机。 作用:(1)①连续不断向地面发送GPS导航和定位信号; ②接收地面站的指令,修正轨道偏差并启动备用设备; ③接收地面站发来的导航电文和其他信号; (2)地面监测系统由一个主控站、三个注入站和五个监测站组成。 主控站:①收集数据:收集本站及各监测站获得的各种数据; ②处理数据:处理收集的数据,按一定格式编制成导航电文; ③监测协调:控制和协调监测站、注入站和卫星的工作; ④控制卫星:修正卫星的运行轨道,发送启动备用设备指令。 注入站:将主控站发来的导航电文注入到相应卫星的存储器中。 监测站:接收卫星信号,为主控站提供卫星的观测数据。 (3)捕获卫星信号,(计算出测站的三维位置,或三维速度和时间)达到导航和定位的目的。 第二章坐标系统和时间系统 1.GPS 定位对坐标系有何要求? (1)需把卫星与地面点的位置统一在一个坐标系内; (2)需采用空间直角坐标系,以便于天球与地球坐标系进行转换; (3)天球与地球坐标系的建立上应具有简便的变换关系。 2.定义一个空间直角坐标系条件有哪些? (1)坐标原点的位置(2)三个坐标轴的指向(3)长度单位 3.WGS-84空间直角坐标系的几何定义? 原点:地球的质心; 三轴指向:Z轴——国际时间局(BIH )1984.0定义的协议地球极(CTP,Conventional Terrestrial Pole)方向; X轴——相应零子午面和赤道的交点(经度零点); Y轴——构成右手坐标系。 4、简述定义时间系统和时间尺度的条件分别是什么? 定义时间系统的条件:尺度(时间单位);原点(历元) 定义时间尺度的条件:周期运动;该周期是连续稳定的;该周期可被观测和实验复现。 第三章卫星运动基础及GPS卫星星历 1、开普勒轨道6参数分别是什么?各参数的作用? ①轨道椭圆长半径a②轨道椭圆第一偏心率e;a ,e 确定轨道椭圆形状和大小。 ③升交点赤经:升交点与春分点所对应的地心夹角称升交点赤经Ω④i轨道面倾角:卫星轨道平面与地球赤道面之间的夹角。Ω,i确定了卫星轨道平面与地球体之间的相对定向。
GPS测量原理与应用实习报告
淮海工学院实习报告书 题目: GPS测量原理与应用实习 学院:测绘工程学院 专业:测绘工程 班级:D测绘131 姓名:戴峻 学号: 2013132911 2015年12 月30 日
实习报告评阅书 学生姓名:戴峻学号: 2013132911 班级:D测绘131 实践教学环节名称: GPS测量原理与应用实习 教学时间:2015年12 月 1 日-2015年12月15 日 指导教师评语: 实习报告成绩: 指导教师(签字): 2016年1月5 日
目录 1、实习目的 (4) 2、实习成员 (4) 3、实习地点 (5) 4、实习原理 (5) 5、实习内容 (6) 5.1G P S静态测量 (6) 5.1.1仪器设备 (6) 5.1.2布网方案 (6) 5.1.3选点原则 (8) 5.1.4外业观测 (9) 5.1.5内业处理 (10) 5.1.6注意事项 (23) 5.2g o a n d s t o p测量 (24) 5.2.1仪器设备 (24) 5.2.2作业过程 (24) 5.2.3内业处理 (25) 5.2.4注意事项 (27) 5.3G P S R T K动态测量 (28) 5.3.1仪器设备 (28) 5.3.2R T K技术原理 (28) 5.3.3外业采集 (29) 5.3.4内业处理 (31) 5.3.5注意事项 (35) 6、实习体会 (36) 附表一:G P S观测手簿记录表 (42) 附表二:点之记 (43)
1、实习目的 G P S课程实习的意义是对《G P S原理及应用》课程有深入的了解,对G P S外业数据采集以及内业数据处理有一定的了解。掌握G P S静态数据采集、静态数据处理、G P S-R T K外业测量。通过实习进一步深入了解G P S原理以及在测绘中的应用,巩固课堂所学的知识.熟练掌握G P S仪器的使用方法,学会G P S进行控制测量的基本方法并掌握G P S数据处理软件的使用方法,把理论知识与实践相结合近一步巩固所学知识。了解G P S原理以及在测绘中的应用,能够用有关理论指导作业实践,做到理论与实践相统一,提高分析问题、解决问题的能力,从而对控制测量学的基本内容得到一次实际应用,使所学知识进一步巩固、深化。 2、实习成员 我们专业一共有14个人,所以分为三个小组。 组织人:李微晓 第一小组成员:刘欣、戴峻、周聪、于健锋、吴开明组长:刘欣 第二小组成员:丁德军、钱小培、于伟鹏、刘先锋
水利工程中的大坝变形监测与维护分析
水利工程中的大坝变形监测与维护分析 发表时间:2018-10-16T15:48:58.703Z 来源:《基层建设》2018年第27期作者:马晓魏 [导读] 摘要:随着科学技术的不断发展,人们对水利资源的开发程度也在不断的加大,有效推动我国基础设施建设发展。 宁波市汇通生态工程建设有限公司浙江宁波 315000 摘要:随着科学技术的不断发展,人们对水利资源的开发程度也在不断的加大,有效推动我国基础设施建设发展。在水利工程建设过程中,为使得水利工程寿命得以有效延长,必然要做好相应的维护与监测分析,尤其需要做好对水利工程大坝的监测与维护分析,对于整体水利工程建设发展有着重要的影响意义。 关键词:水利工程大坝变形监测与维护 变形监测是反映大坝运行性态最直观的一种监测方式,因此变形监测项目列为大坝安全监测的首选监测项目。根据《土石坝安全监测技术规范》(SL551-2012)要求,表面变形监测内容包括坝面的垂直位移和水平位移。目前变形常规监测方法主要包括视准线法、水准法、激光准直法和引张线法等,均为人工观测。利用全站仪、水准仪等进行的传统人工变形监测主要由具有一定专业知识和技能的人员担当,通过定期的测取各种观测值获取监测数据,再通过一定的后期方法进行后处理,并对处理结果进行人工分析。监测工作量大,受天气、人、现场条件等许多因素的影响,存在人为误(如架站、仪高量取、对中误差、操作失误),监测效率低下。同时,由于人工监测不能实时获取监测对象的变形数据,难以及时掌握工程的各项安全技术指标和安全隐患,这些都影响安全监测工程的质量。 一、大坝安全监测内容与精度要求 针对不同结构的水工建筑物,其相应的观测内容也各不相同。以水利工程中大坝为例,整条观测内容主要包括现场检查,外部观测和内部观测。其中对于现场检查来说,具体指的是对大坝的上、下游、廊道等外露部分进行检查,查看其是否存在裂缝、渗水、冲蚀、磨损、等问题。在外部观测方面,主要包括大坝的水平位移、沉降、倾斜、挠度进行观测,还要做好大坝的纵、横缝和裂缝观测。在内部观测方面,主要包括坝内的应力、应变观测、渗流、水力、水文和泥沙观测等。尽管由于因观测项目的不同相应的观测对象也不有所不同,但必需的观测对象为水平位移、沉降和水位的观测。对于混凝土坝来说,还应做好观测伸缩缝和混凝土温度观测准备。在安全监测的精度要求方面,其主要取决于观测的目的和建筑物本身允许变形值的大小。 二、对大坝各项变形设备进行监测安装 (一)做好监测设备予留与予埋的布设与检查工作 针对大坝的变形检测需要很多施工设备,在相应施工设备安装过程中需要严格按照施工图纸进行,做好予留与予埋的放样测量工作,为后续施工工作做好充足的准备。在予留槽与予埋件的施工安装过程中,需要做好相应定位,确保安装牢固且具有较强的稳定性,完成相应安装之后,需要做好予埋件与予留槽安装效果检查与验收工作。当予留和予埋顺利完成部分混凝土浇筑施工工作后,就要着手进行安装效果的检查与验收工作,从而可以有效避免相应予留和予埋构件出现走样变位问题。若在后续的成果验收中发现了该问题,应进一步采取相应措施做好问题补救工作。 (二)做好正垂线埋设与安装工作 针对混凝土坝体的正垂线埋管工作非常重要,因此在施工过程中应严格按照施工图纸进行,并根据施工图纸的标注做好放样测量工作,然后再进行埋管中心位置的确定,在这一过程中,需要做好对埋管垂直度的控制,保证垂直度在施工图纸要求的设计范围之内,具体开展埋管的埋设工作时,应做好对埋管的加固工作,保证埋管足够牢固。从而确保在后续进行混凝土浇筑施工过程中,埋管不会发生走位变形问题。与此同时,施工过程中还要避免对埋管造成碰撞,完成混凝土浇筑施工后,需要重新对垂线埋管的垂直度进行相应检查,并做好垂直度的复测工作。在进行砼管的安装时,需要保证管口之间的衔接具有良好的平顺性,做好焊接(缝)工作,保证其平整性与严密性。组最后安装完成正垂线埋管之后,需要对竣工资料做好整理,为后学的资料插查验奠定坚实的基础。 三、做好变形监测设备的安装与调试工作 (一)做好倒垂线的调试与安装工作 首先做好对保护管垂直度的检查与复测工作,可以利用浮体组配合单行导中器完成,然后再对倒垂锚块的埋设位置加以确定。在安装垂浮体组和倒垂线锚块时,需要严格根据施工方案与图纸进行。可以利用滑轮原理,将倒垂线锚块的安装材料通过不锈钢丝吊入倒垂线保护管中,在锚块受自重作用力的影响下,通过张拉不锈钢丝,可以以锚块位置为依据,来判断不锈钢丝的位置,然后在倒垂线保护管中完成注浆软管的安装,与此同时,还应对埋设锚块所需要的水泥沙浆用量加以计算,并利用注浆软管文昌水泥砂浆的注入。在完成注浆之后,需要重新利用锚块位置检测不锈钢丝位置,若安装位置存在偏移问题,应及时采取相应补救措施,完成其布设位置的调整。 (二)做好正垂线的复测与调试 在对正垂线的复测与调试过程中,应以正垂线埋管的垂直度作为相应依据,从而完从成正垂线实际埋设位置的确定,然后以正垂线的实际埋设位置为根据,做好对垂线悬线装置、固定夹线装置及活动夹线装置的安装。在具体安装过程中,对于夹线装置的固定,可以利用悬挂正垂线阻尼重锤来完成。然后布设垂线底标仪基座,具体布设位置为正垂线混凝土观测墩之上,用于整体系统的检测与安装,最后完成正锤油桶中变压器油的固定。 (三)做好引张线的调试与安装工作 在正式安装引张线之前,需要根据具体设计要求做好采购配重件的规格与质量加测工作,然后再对引张线的安装位置进行确定,接着可以根据确定好的引张线的安装位置进行安装端点与测点装置的埋设,其中需要做好端点滑轮槽、夹线装置V型槽与测点读数钢尺高差的控制,具体高差控制在范围之内,随后再开展引张线不锈钢丝的张拉与固定工作,最后通过在测点位置上进行浮船与水箱的放置,并保证引张线钢丝复位精度要优于。 四、做好变形施工期监测与资料整理分析 用于监测大坝变形的相关仪器与设备需要做好相应的计量检测,保证其使用性良好,并满足我国有关计量检测的规定与要求。在进行施工过程中,观测工作应应严格按照国家相应规范与设计要求进行,保证技术标准符合要求,根据设计要求确定好施工观测的频次。另一方面,还要做好施工其资料的检查整理,做好相应的平差计算工作。针对资料做好初步的整理与分析,并及时进行报送处理。当施工期处
大坝变形监测doc资料
大坝变形监测
安徽建筑大学 毕业设计 (论文) 专业测绘工程 班级 2班 学生姓名翟凯 学号 11201050235 课题基于GPS大坝变形监测 指导教师施贵刚 2015年月日
摘要 大坝安全监测,着重于变形监测,是保证大坝运营安全,防止大坝 灾难性事故发生的重要手段。本文基于GPS测量的基本原理,通过大坝变形监测网的布设,处理采集到的前后两期观测数据,通过比 较监测点分别在WGS—84坐标系和1954北京坐标系下的坐标差值,得出的结果符合大坝变形的精度要求,从而得出某大坝尚未发生明 显变形这一结论。不足之处在于标志点在WGS—84坐标系中向1954北京坐标系的投影过程中产生了误差,使得控制点的两期坐标不等。由此可知,各坐标之间转换的时候,投影误差不可以忽略,精 度分析的时候,为减小误差,最好统一在WGS—84坐标系下进行解算、分析。 关键词;GPS ;变形监测;精度 ABSTRACT The dam safety monitoring, focuses on the deformation monitoring, it is to ensure the safety of dam operation, prevent the catastrophic accidents. In this paper, based on the basic principle of GPS measurement, through the dam deformation monitoring network layout, processing, both before and after the period of observation data collected by comparing the monitoring points in the WGS - 84 coordinate system and 1954 Beijing coordinates the coordinates of the difference, the results conform to the requirements of the precision of the dam deformation, thus a dam has not yet occurred obvious deformation of the conclusion. Shortcoming in the landmark in the WGS - 84 coordinate system to the 1954 Beijing coordinate system
最新大坝变形监测
安徽建筑大学 毕业设计 (论文) 专业测绘工程 班级 2班 学生姓名翟凯 学号 11201050235 课题基于GPS大坝变形监测 指导教师施贵刚 2015年月日
摘要 大坝安全监测,着重于变形监测,是保证大坝运营安全,防止大坝灾难性事故发生的重要手段。本文基于GPS测量的基本原理,通过大坝变形监测网的布设,处理采集到的前后两期观测数据,通过比较监测点分别在WGS—84坐标系和1954北京坐标系下的坐标差值,得出的结果符合大坝变形的精度要求,从而得出某大坝尚未发生明显变形这一结论。不足之处在于标志点在WGS—84坐标系中向1954北京坐标系的投影过程中产生了误差,使得控制点的两期坐标不等。由此可知,各坐标之间转换的时候,投影误差不可以忽略,精度分析的时候,为减小误差,最好统一在WGS—84坐标系下进行解算、分析。 关键词;GPS ;变形监测;精度 ABSTRACT The dam safety monitoring, focuses on the deformation monitoring, it is to ensure the safety of dam operation, prevent the catastrophic accidents. In this paper, based on the basic principle of GPS measurement, through the dam deformation monitoring network layout, processing, both before and after the period of observation data collected by comparing the monitoring points in the WGS - 84 coordinate system and 1954 Beijing coordinates the coordinates of the difference, the results conform to the requirements of the precision of the dam deformation, thus a dam has not yet occurred obvious deformation of the conclusion. Shortcoming in the landmark in the WGS - 84 coordinate system to the 1954 Beijing coordinate system produced in the process of
大坝变形监测应注意的几个问题
大坝变形监测问题浅析 作者:梁斌作者单位:陕西省宝鸡峡管理局信息通讯中心 摘要:对大坝变形监测中存在的环境潮湿、设备受各种外界条件干扰、折光影响、测点变形、蓄水期前很少测得大坝监测的基准值等问题进行分析,并根据实践提出一些看法。 关键词:变形监测环境潮湿外界干扰测点变形基准值 Abstract:This paper analyzes s。me issues occurred in dam deformation monitoring,including wet environment,facilities disturbed by external condition,refraction influence,mark deformation,few datum value obtained before impounded.so,some opinions have been brought renvard by practice. Keywords:deformation monitoring,datum value,mark deformation,wet environment,external disturbance 1 概述 大坝变形是坝体和基础状态的综合反映,也是衡量大坝运行时结构是否正常、可靠、安 全的重要标志。因此,变形监测一直被列为大坝主要观测项目,特别受到运行管理单位的重视。 我国变形监测是从l954年开始,最早在丰满大坝采用视准线观测坝顶水平位移,50年代 末在新安江、三门峡等大坝也都开展了变形监测。60~70年代以后,一般大、中型坝均设有 变形监测项目。观测方法在50-60年代基本是用视准线量测水平位移,用精密水准法测垂直 位侈,用正倒垂线测坝体和坝基的相对变形及绝对变形。70年代开始采用引张线等,80年代 变形观测发展很快,出现了垂线及引张线遥测坐标仪、真空激光准直系统、遥测静力水准仪等,对水工建筑物的监测也从坝体和坝基扩展到坝基深处、坝肩及近坝库岸边坡等。90年代 我国变形监测开始进入自动化阶段,采用了先进仪器和自动化数据采集系统,含有专家系统 和决策支持系统一定成分的大坝监测信息系统正在一些大坝开展并实现,有的已经联网,实 现了多座大坝的安全监测信息管理系统。 但在变形监测中普遍存在观测环境潮湿,致使设备金属部分生锈,电气部分绝缘降低, 监测不能正常连续工作;观测设备受到外界条件干扰严重(视准线受折光影响,垂线和引张线受风、冰霜冻结、人为和动物碰撞等);有的测点采用焊接钢架结构,由于金属蠕变或内应力变形,带来很大的误差,使观测资料失真;有的测点基础混凝土因冻胀变形,出现坝体抬高 等问题;多数大坝缺少首次蓄水监测,大部分都未测得蓄水前及蓄水期间的观测资料,即无 蓄水前的基准值,往往是在蓄水后若干年才从头开始,其基准值是相对某一水位的数值;给 资料整理与分析带来了一定的困难。上述问题不仅影响变形监测的精度,还影响大坝监测工 作的正常进行;有的花很大力量解决后,监测资料又不连续,有的至今仍在困扰着变形监测 工作的开展,特别是影响变形监测自动化系统的长期性和稳定性。现对这些问题加以分析, 并根据实践提出一些看法,供参考。 2 环境潮湿 有的大坝变形监测系统布设在廊道、坝腔、竖井等处,这些地方在一年中,有时干燥,
《GPS测量原理及应用》题库
一、单选题 1、卫星星座配置有( D )颗在轨卫星。 A. 21 B. 12 C. 18 D. 24 2、是指( C )。 A. 协议天球坐标系 B. 协议地球坐标系 C. 协调世界时 D. 国际原子时 3、政策是指( D )。 A. 紧密定位服务 B. 标准定位服务 C. 选择可用性 D. 反电子欺骗 4、定位中,信号传播过程中引起的误差主要包括大气折射的影响和( A )影响。 A. 多路径效应 B. 对流层折射 C. 电离层折射 D. 卫星中差 5、一般地,单差观测值是在( A )的两个观测值之间求差。 A. 同卫星、同历元、异接收机 B. 同卫星、异历元、异接收机 C. 同卫星、同历元、同接收机 D. 同卫星、异历元、异接收机 6、双差观测方程可以消除( D )。 A. 整周未知数 B. 多路径效应 C. 轨道误差 D.
接收机钟差 7、码的周期是( A )。 A. 1 B. 7天 C. 38星期 D. 1 9、在测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。 A、几何中心 B、相位中心 C、点位中心 D、高斯投影平面中心 10、岁差和章动旋转变换是用于哪两个坐标系之间的转换( A )。 A、瞬时极天球坐标系与平天球坐标系 B、瞬时极天球坐标系与平地球坐标系 C、瞬时极天球坐标系与瞬时极地球坐标系 D、平天球坐标系与平地球坐标系 11、定位的实质就是根据高速运动的卫星瞬间位置作为已知数据,采用(A )的方法,确定待定点的空间位置。 A、空间距离后方交会 B、空间距离前方交会 C、空间角度交会 D、空间直角坐标交会 12、根据定位原理,至少需要接收到(B )颗卫星的信号才能定位。 A、5 B、4 C、3 D、2 13、在以下定位方式中,精度较高的是(C )。 A、绝对定位 B、相对定位
三江口水利枢纽工程大坝边坡变形监测方案
大坝边坡变形监测方案 1、编制依据 1、三江口水利枢纽工程右坝肩施工图设计文件 2、《水利水电工程施工测量规范》(SL52-93) 3、《工程测量规范》(GB50026-2003) 4、《国家三角测量规范》(GB/T17942-2000) 5、《国家三、四等水准测量规范》(GB12898-2009) 6、三江口水利枢纽工程坝肩地形地质调查资料 2、工程概况 2.1工程基本情况 三江口水利枢纽工程位于重庆市彭水县青平乡境内的普子河下游,距彭水县城35km,是普子河流域规划的第四个阶梯级电站。 三江口水利枢纽工程是一水利综合利用工程,工程的开发任务为发电、灌溉、场镇供水和农村人、畜饮水。根据《防洪标准》(GB50201-94),三江口水利枢纽工程属Ⅲ等中型工程。水库为不完全年调节水库,正常蓄水位306.0m,总库容6813万m3,灌溉面积 5.231万亩,向乡镇及人畜年供水量1325万m3,电站总装机3.0万kw。 枢纽建筑物主要由拦河大坝、溢流表孔、电站进水口、发电引水系统及电站厂房、灌溉干渠及大型渠系交叉建筑物等组成。 拦河大坝为混凝土双曲拱坝,在其右岸非溢流坝段设置取水建筑物,泄水建筑物包括溢流表孔、大坝底孔。大坝基础高程为236.00m,坝顶高程309.50m,最大坝高73.5m,坝顶长度201.06m,中部偏左岸布置5孔表孔泄洪;坝顶宽5m,底宽18m;压力引水隧洞全长603m,圆型洞身开挖断面6.3m。 2.2工程地质 2.2.1气象 普子河流域属亚热带湿润气候区,气候温和,雨量弃沛,四季分明。多年平均气温17.6℃,极端最高气温44.1℃,极端最低气温~3.8℃,多