不拆机更换HG255D的U-BOOT并刷OPENWRT和DD
不拆机更换HG255D的U-BOOT并刷OPENWRT
1、将电脑本地网卡设成固定ip 192.168.1.2 网关留空。
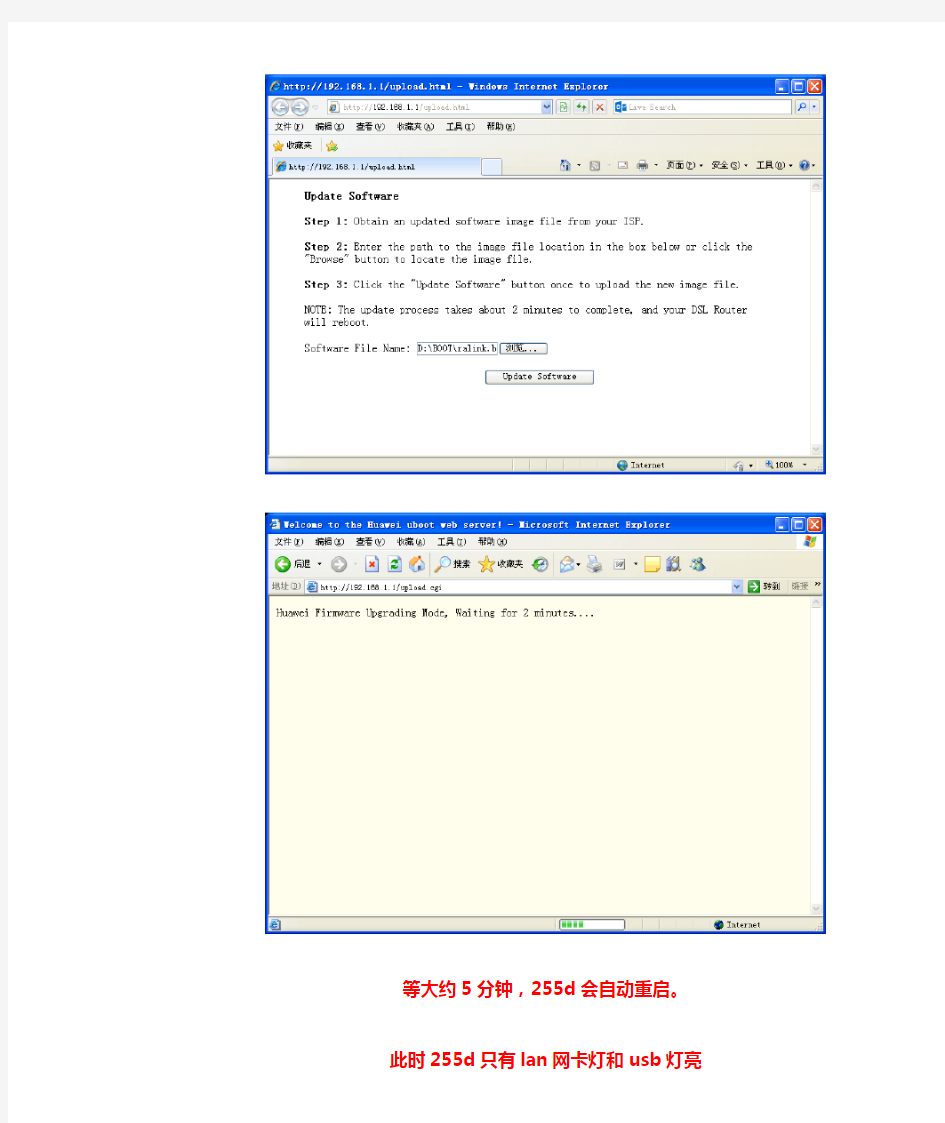
2、打开IE并在地址栏输入http://192.168.1.1/upload.html
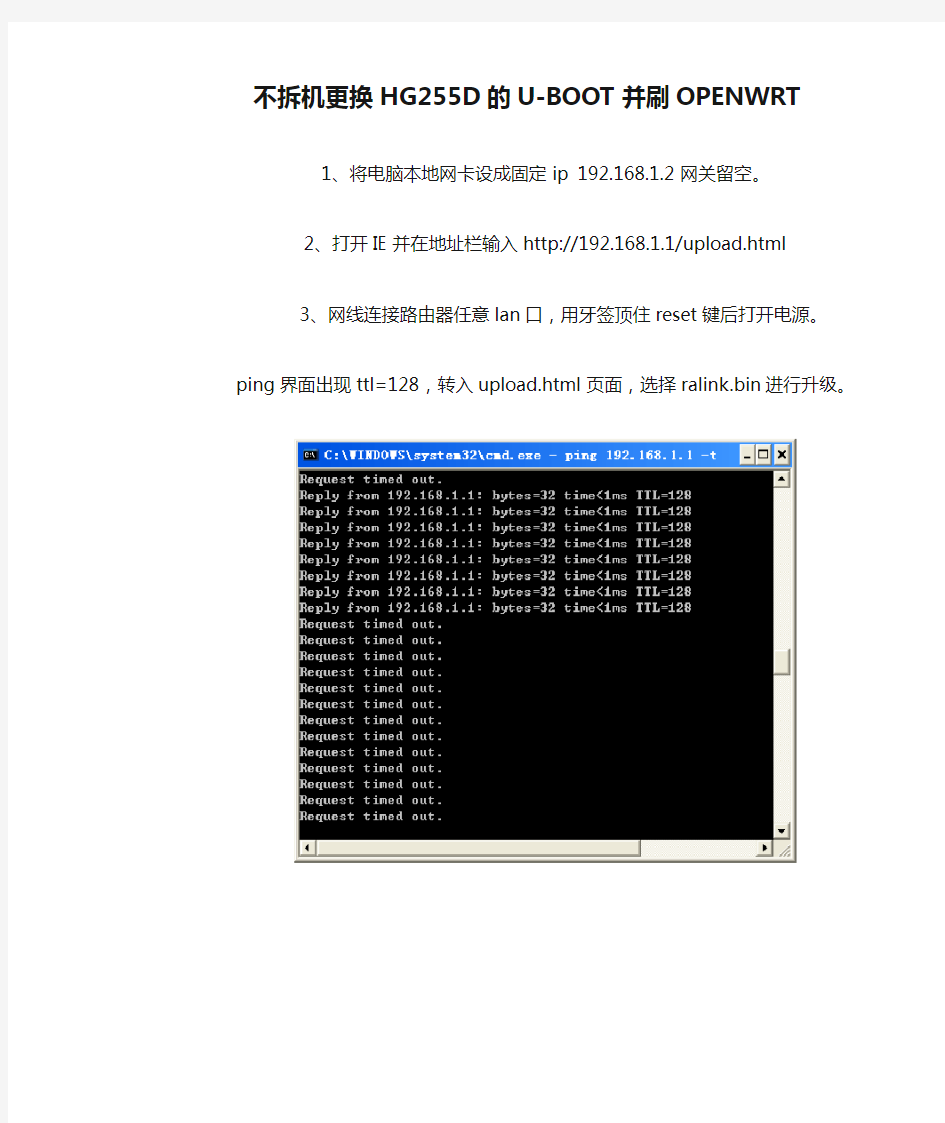
3、网线连接路由器任意lan口,用牙签顶住reset键后打开电源。ping界面出现ttl=128,转入upload.html页面,选择ralink.bin进行升级。
等大约5分钟,255d会自动重启。
此时255d只有lan网卡灯和usb灯亮
找到电脑连255d网卡,禁用,然后启用,更新ip数据。现在可以ping通255d
2.打开管理界面。开打192.168.1.1.帐号密码同为admin
.
找到系统管理->系统指令。
执行命令:
/hg255d/hg255d-flash-uboot.sh
更新完成后就可以手动重启了。
开机按住WPS,WLAN,RESET中的任意一个按键,等待电源灯闪
现在可以通过TFTP更新固件
同样,通过TFTP可以更新U-BOOT,EEPROM,固件等。
注意:IP地址必须为192.168.1.100才能更新。
通过TFTP更新WEB版的U-BOOT
开机按住WPS,WLAN,RESET中的任意一个按键,等待电源灯闪
出现ping界面为ttl=128说明新版u-boot更新成功。Web版u-boot支持ping 此时可以在浏览器输入192.168.1.1进行固件更新了。
更新20120909-DreamBox-ramips-rt305x-hg255d-squashfs-sysupgrade.bin固件。
也可更新255D刷DD固件.bin
如果需要恢复到原厂U-BOOT 的,同样在TFTP 或者web 版u-boot 版下更新ralink.bin 固件,
更新的命令更改成:
/hg255d/hg255d-flash-tel-uboot.sh
我刷了多台DD 固件,均成攻。
UBOOT命令详解
常用U-boot命令详解(z) 2010-09-30 15:05:52| 分类:学习心得体会|字号订阅 U-boot发展到现在,他的命令行模式已经非常接近Linux下的shell了,在我编译的 U-boot-2009.11中的命令行模式模式下支持“Tab”键的命令补全和命令的历史记录功能。而且如果你输入的命令的前几个字符和别的命令不重复,那么你就只需要打这几个字符即可,比如我想看这个U-boot的版本号,命令就是“ version”,但是在所有的命令中没有其他任何一个的命令是由“v”开头的,所以只需要输入“v”即可。 [u-boot@MINI2440]# version U-Boot 2009.11 ( 4月04 2010 - 12:09:25) [u-boot@MINI2440]# v U-Boot 2009.11 ( 4月04 2010 - 12:09:25) [u-boot@MINI2440]# base Base Address: 0x00000000 [u-boot@MINI2440]# ba Base Address: 0x00000000 由于U-boot支持的命令实在太多,一个一个细讲不现实,也没有必要。所以下面我挑一些烧写和引导常用命令介绍一下,其他的命令大家就举一反三,或者“help”吧! (1)获取帮助 命令:help 或? 功能:查看当前U-boot版本中支持的所有命令。 [u-boot@MINI2440]#help ?- alias for'help' askenv - get environment variables from stdin base - print or set address offset bdinfo - print Board Info structure bmp - manipulate BMP image data boot - boot default, i.e., run 'bootcmd' bootd - boot default, i.e., run 'bootcmd' bootelf - Boot from an ELF image in memory bootm - boot application image from memory bootp - boot image via network using BOOTP/TFTP protocol
Tiny6410_Uboot移植步骤详解
Uboot_for_Tiny6410_移植步骤详解 一、设计要求 1.目的 1)掌握U-boot剪裁编写 2)掌握交叉编译环境的配置 3)掌握U-boot的移植 2.实现的功能 1)U-boot编译成功 2)移植U-boot,使系统支持从NAND FLASH启动 二、设计方案 1.硬件资源 1)ARM处理器:ARM11芯片(Samsung S3C6410A),基于ARM1176JZF-S核设 计,运行频率533Mhz,最高可达 667Mhz 2)存储器:128M DDR RAM,可升级至 256M;MLC NAND Flash(2GB) 3)其他资源:具有三LCD接口、4线电阻 触摸屏接口、100M标准网络接口、标准DB9 五线串口、Mini USB2.0接口、USB Host 1.1、3.5mm音频输入输出口、标准TV-OUT
接口、SD卡座、红外接收等常用接口;另外 还引出4路TTL串口,另1路TV-OUT、 SDIO2接口(可接SD WiFi)接口等;在板的 还有蜂鸣器、I2C-EEPROM、备份电池、A D 可调电阻、8个中断式按键等。 2.软件资源 1)arm-linux-gcc-4.5.1(交叉编译) 2)u-boot-2010.09.tar.gz arm-linux-gcc-4.5.1-v6-vfp-20101103.t gz 三、移植过程 1.环境搭建 1)建立交叉编译环境 2)去这2个网站随便下载都可以下载得到最 新或者你想要的u-boot。( https://www.360docs.net/doc/882144051.html,/batch.viewl ink.php?itemid=1694 ftp://ftp.denx.de/pub/u-boot/ )
UBoot移植详解
u-boot 移植步骤详解 1 U-Boot简介 U-Boot,全称Universal Boot Loader,是遵循GPL条款的开放源码项目。从FADSROM、8xxROM、PPCBOOT逐步发展演化而来。其源码目录、编译形式与Linux内核很相似,事实上,不少U-Boot源码就是相应的Linux内核源程序的简化,尤其是一些设备的驱动程序,这从U-Boot源码的注释中能体现这一点。但是U-Boot不仅仅支持嵌入式Linux 系统的引导,当前,它还支持NetBSD, VxWorks, QNX, RTEMS, ARTOS, LynxOS嵌入式操作系统。其目前要支持的目标操作系统是OpenBSD, NetBSD, FreeBSD,4.4BSD, Linux, SVR4, Esix, Solaris, Irix, SCO, Dell, NCR, VxWorks, LynxOS, pSOS, QNX, RTEMS, ARTOS。这是U-Boot中Universal的一层含义,另外一层含义则是U-Boot除了支持PowerPC系列的处理器外,还能支持MIPS、x86、ARM、NIOS、XScale等诸多常用系列的处理器。这两个特点正是U-Boot项目的开发目标,即支持尽可能多的嵌入式处理器和嵌入式操作系统。就目前来看,U-Boot对PowerPC系列处理器支持最为丰富,对Linux的支持最完善。其它系列的处理器和操作系统基本是在2002年11 月PPCBOOT 改名为U-Boot后逐步扩充的。从PPCBOOT向U-Boot的顺利过渡,很大程度上归功于U-Boot的维护人德国DENX软件工程中心Wolfgang Denk[以下简称W.D]本人精湛专业水平和持着不懈的努力。当前,U-Boot项目正在他的领军之下,众多有志于开放源码BOOT LOADER移植工作的嵌入式开发人员正如火如荼地将各个不同系列嵌入式处理器的移植工作不断展开和深入,以支持更多的嵌入式操作系统的装载与引导。 选择U-Boot的理由: ①开放源码; ②支持多种嵌入式操作系统内核,如Linux、NetBSD, VxWorks, QNX, RTEMS, ARTOS, LynxOS; ③支持多个处理器系列,如PowerPC、ARM、x86、MIPS、XScale; ④较高的可靠性和稳定性; ④较高的可靠性和稳定性; ⑤高度灵活的功能设置,适合U-Boot调试、操作系统不同引导要求、产品发布等; ⑥丰富的设备驱动源码,如串口、以太网、SDRAM、FLASH、LCD、NVRAM、EEPROM、RTC、键盘等; ⑦较为丰富的开发调试文档与强大的网络技术支持; 2 U-Boot主要目录结构 - board 目标板相关文件,主要包含SDRAM、FLASH驱动; - common 独立于处理器体系结构的通用代码,如内存大小探测与故障检测;
i.MX6UL -- Linux系统移植过程详解(最新的长期支持版本)
i.MX6UL -- Linux系统移植过程详解(最新的长期支持版本) ?开发平台:i.MX 6UL ?最新系统: u-boot2015.04 + Linux4.1.15_1.2.0 ?交叉编译工具:dchip-linaro-toolchain.tar.bz2 源码下载地址: U-Boot: (选择rel_imx_4.1.15_1.2.0_ga.tar.bz2) https://www.360docs.net/doc/882144051.html,/git/cgit.cgi/imx/uboot-imx.git/ Kernel: (选择rel_imx_4.1.15_1.2.0_ga.tar.bz2) https://www.360docs.net/doc/882144051.html,/git/cgit.cgi/imx/linux-2.6-imx.git/ 源码移植过程: 1、将linux内核及uBoot源码拷贝到Ubuntu12.04系统中的dchip_imx6ul目录下; 2、使用tar命令分别将uboot和kernel解压到dchip_imx6ul目录下; 3、解压后进入uboot目录下,新建文件make_dchip_imx6ul_uboot201504.sh,且文件内容如下: ################################################################### # Build U-Boot.2015.04 For D518--i.MX6UL By FRESXC # ################################################################### #!/bin/bash export ARCH=arm export CROSS_COMPILE=
u-boot启动分析
背景: Board →ar7240(ap93) Cpu →mips 1、首先弄清楚什么是u-boot Uboot是德国DENX小组的开发,它用于多种嵌入式CPU的bootloader程序, uboot不仅支持嵌入式linux系统的引导,当前,它还支持其他的很多嵌入式操作系统。 除了PowerPC系列,还支持MIPS,x86,ARM,NIOS,XScale。 2、下载完uboot后解压,在根目录下,有如下重要的信息(目录或者文件): 以下为为每个目录的说明: Board:和一些已有开发板有关的文件。每一个开发板都以一个子目录出现在当前目录中,子目录存放和开发板相关的配置文件。它的每个子文件夹里都有如下文件(以ar7240/ap93为例): Makefile Config.mk Ap93.c 和板子相关的代码 Flash.c Flash操作代码 u-boot.lds 对应的链接文件 common:实现uboot命令行下支持的命令,每一条命令都对应一个文件。例如bootm命令对应就是cmd_bootm.c cpu:与特定CPU架构相关目录,每一款Uboot下支持的CPU在该目录下对应一个子目录,比如有子目录mips等。它的每个子文件夹里都有入下文件: Makefile Config.mk Cpu.c 和处理器相关的代码s Interrupts.c 中断处理代码 Serial.c 串口初始化代码 Start.s 全局开始启动代码 Disk:对磁盘的支持
Doc:文档目录。Uboot有非常完善的文档。 Drivers:Uboot支持的设备驱动程序都放在该目录,比如网卡,支持CFI的Flash,串口和USB等。 Fs:支持的文件系统,Uboot现在支持cramfs、fat、fdos、jffs2和registerfs。 Include:Uboot使用的头文件,还有对各种硬件平台支持的汇编文件,系统的配置文件和对文件系统支持的文件。该目下configs目录有与开发板相关的配置文件,如 ar7240_soc.h。该目录下的asm目录有与CPU体系结构相关的头文件,比如说mips 对应的有asm-mips。 Lib_xxx:与体系结构相关的库文件。如与ARM相关的库放在lib_arm中。 Net:与网络协议栈相关的代码,BOOTP协议、TFTP协议、RARP协议和NFS文件系统的实现。 Tools:生成Uboot的工具,如:mkimage等等。 3、mips架构u-boot启动流程 u-boot的启动过程大致做如下工作: 1、cpu初始化 2、时钟、串口、内存(ddr ram)初始化 3、内存划分、分配栈、数据、配置参数、以及u-boot代码在内存中的位置。 4、对u-boot代码作relocate 5、初始化malloc、flash、pci以及外设(比如,网口) 6、进入命令行或者直接启动Linux kernel 刚一开始由于参考网上代码,我一个劲的对基于smdk2410的板子,arm926ejs的cpu看了N 久,启动过程和这个大致相同。 整个启动中要涉及到四个文件: Start.S →cpu/mips/start.S Cache.S →cpu/mips/cache.S Lowlevel_init.S →board/ar7240/common/lowlevel_init.S Board.c →lib_mips/board.c 整个启动过程分为两个阶段来看: Stage1:系统上电后通过汇编执行代码 Stage2:通过一些列设置搭建了C环境,通过汇编指令跳转到C语言执行. Stage1: 程序从Start.S的_start开始执行.(至于为什么,参考u-boot.lds分析.doc) 先查看start.S文件吧!~ 从_start标记开始会看到一长串莫名奇妙的代码:
UBoot源码分析1
?UBoot源码解析(一)
主要内容 ?分析UBoot是如何引导Linux内核 ?UBoot源码的一阶段解析
BootLoader概念?Boot Loader 就是在操作系统内核运行之前运行 的一段小程序。通过这段小程序,我们可以初始 化硬件设备、建立内存空间的映射图,从而将系 统的软硬件环境带到一个合适的状态,以便为最 终调用操作系统内核准备好正确的环境 ?通常,Boot Loader 是严重地依赖于硬件而实现 的,特别是在嵌入式世界。因此,在嵌入式世界 里建立一个通用的Boot Loader 几乎是不可能的。 尽管如此,我们仍然可以对Boot Loader 归纳出 一些通用的概念来,以指导用户特定的Boot Loader 设计与实现。
UBoot来源?U-Boot 是 Das U-Boot 的简称,其含义是 Universal Boot Loader,是遵循 GPL 条款的开放源码项目。最早德国 DENX 软件工程中心的 Wolfgang Denk 基于 8xxROM 和 FADSROM 的源码创建了 PPCBoot 工程项目,此后不断 添加处理器的支持。而后,Sysgo Gmbh 把 PPCBoot 移 植到 ARM 平台上,创建了 ARMBoot 工程项目。最终, 以 PPCBoot 工程和 ARMBoot 工程为基础,创建了 U- Boot 工程。 ?而今,U-Boot 作为一个主流、通用的 BootLoader,成功地被移植到包括 PowerPC、ARM、X86 、MIPS、NIOS、XScale 等主流体系结构上的百种开发板,成为功能最多、 灵活性最强,并且开发最积极的开源 BootLoader。目前。 U-Boot 仍然由 DENX 的 Wolfgang Denk 维护
嵌入式Linux之我行 史上最牛最详细的uboot移植,不看别后悔
嵌入式Linux之我行——u-boot-2009.08在2440上的移植详解(一) 嵌入式Linux之我行,主要讲述和总结了本人在学习嵌入式linux中的每个步骤。一为总结经验,二希望能给想入门嵌入式Linux 的朋友提供方便。如有错误之处,谢请指正。 ?共享资源,欢迎转载:https://www.360docs.net/doc/882144051.html, 一、移植环境 ?主机:VMWare--Fedora 9 ?开发板:Mini2440--64MB Nand,Kernel:2.6.30.4 ?编译器:arm-linux-gcc-4.3.2.tgz ?u-boot:u-boot-2009.08.tar.bz2 二、移植步骤 本次移植的功能特点包括: ?支持Nand Flash读写 ?支持从Nor/Nand Flash启动 ?支持CS8900或者DM9000网卡 ?支持Yaffs文件系统 ?支持USB下载(还未实现) 1.了解u-boot主要的目录结构和启动流程,如下图。
u-boot的stage1代码通常放在cpu/xxxx/start.S文件中,他用汇编语言写成;u-boot的stage2代码通常放在lib_xxxx/board.c文件中,他用C语言写成。各个部分的流程图如下:
2. 建立自己的开发板项目并测试编译。 目前u-boot对很多CPU直接支持,可以查看board目录的一些子目录,如:board/samsung/目录下就是对三星一些ARM 处理器的支持,有smdk2400、smdk2410和smdk6400,但没有2440,所以我们就在这里建立自己的开发板项目。 1)因2440和2410的资源差不多,主频和外设有点差别,所以我们就在board/samsung/下建立自己开发板的项目,取名叫my2440 2)因2440和2410的资源差不多,所以就以2410项目的代码作为模板,以后再修改
iTop4412的uboot第一阶段
2 uboo t 源码分析 2.5.1.star t.S 2.5.1.star t.S 引入引入 2.5.1.1、u-boot.lds中找到start.S入口 (1)在C语言中整个项目的入口就是 main函数(这是 个.c文件的项目,第一个要分析的文件就是包含了C语言规定的),所以譬如说一 个有 main函数的那个文件。 10000 ( 2 方。ENTRY(_start)因此 _start 符号所在的文件就是整个程序的起始文 件, _sta rt 所在处的 代码就是整个程序的起始代码。 2.5.1.2、SourceInsight中如何找到 文件 (1)当前状况:我们知道在uboot中的1000多个文件中有一个符号 叫 _start,但是我们不知道 这个符号在哪个文件中。这种情况下要查找一个符号在所有项目中文件中的引用,要使用SourceInsight的搜索功能。 (2)start.s 在cpu/arm_cortexa9/start.s (3)然后进入start.S文件中,发现 个uboot的入口代码,就是第57 57行中就 是行。_sta rt 标号的定义处,于是乎我们就找到了整 2.5.1.3、SI中找文件技巧 (1)以上,找到了start.S文件,下面我们就从start.S文件开始分析uboot第一阶段。 (2)在SI中,如果我们知道我们要找的文件的名字,但是我们又不知道他在哪个目录下,我 们要怎样找到并打开这个文件?方法是在 SI中先打开右边的工程项目管理栏目,然后点击 最左边那个(这个是以文件为单位来浏览的),然后在上面输入栏中输入要找的文件的名 字。我们在输入的时候,SI在不断帮我们进行匹配,即使你不记得文件的全名只是大概记 得名字,也能帮助你找到你要找的文件。 2.5.2.start.S解析1 2.5.2.1、不简单的头文件包含
uboot环境变量总结
Common目录下面与环境变量有关的文件有以下几个:env_common.c,env_dataflash.c,env_eeprom.c,env_flash.c,env_nand.c,env_nowhere.c,env_nvram.c,environment.c。 env_common.c中包含的是default_environment[]的定义; env_dataflash.c,env_eeprom.c,env_flash.c,env_nand.c, env_nvram.c 中包含的是相应存储器与环境变量有关的函数:env_init(void),saveenv(void),env_relocate_spec (void),env_relocate_spec (void),use_default()。至于env_nowhere.c,因为我们没有定义CFG_ENV_IS_NOWHERE,所以这个文件实际上没有用。 environment.c这个文件时是我真正理解环境变量的一个关键。在这个文件里定义了一个完整的环境变量的结构体,即包含了这两个ENV_CRC(用于CRC校验),Flags(标志有没有环境变量的备份,根据CFG_REDUNDAND_ENVIRONMENT这个宏定义判断)。定义这个环境变量结构体的时候还有一个非常重要的关键字: __PPCENV__,而__PPCENV__在该.c文件中好像说是gnu c编译器的属性,如下: # define __PPCENV__ __attribute__ ((section(".text"))) 意思是把这个环境变量表作为代码段,所以在编译完UBOOT后,UBOOT的代码段就会有环境变量表。当然,这要在我们定义了ENV_IS_EMBEDDED之后才行,具体而言,环境变量表会在以下几个地方出现(以nand flash为例): 1、UBOOT中的代码段(定义了ENV_IS_EMBEDDED), 2、UBOOT中的默认环 境变量, 3、紧接UBOOT(0x0 ~ 0x1ffff)后面:0x20000 ~ 0x3ffff 之间,包括备份的环境变量,我们读取,保存也是对这个区域(即参数区)进行的。3、SDRAM中的UBOOT中,包括代码段部分和默认部分,4、SDRAM中的melloc分配的内存空间中。 Environment.c代码如下: env_t environment __PPCENV__ = { ENV_CRC, /* CRC Sum */ #ifdef CFG_REDUNDAND_ENVIRONMENT 1, /* Flags: valid */ #endif { #if defined(CONFIG_BOOTARGS) "bootargs=" CONFIG_BOOTARGS "\0" #endif #if defined(CONFIG_BOOTCOMMAND) "bootcmd=" CONFIG_BOOTCOMMAND "\0" #endif #if defined(CONFIG_RAMBOOTCOMMAND) "ramboot=" CONFIG_RAMBOOTCOMMAND "\0"
uboot_freescale_imx51_start.s_详解
/* * *Purpose: the document is used to learn detailed information aboutimx51 cpu start.S, *referring to some documents on websites. *file address: U-boot-2009.08/Cpu/Arm_cortexa8/start.S * * writer: xfhai 2011.7.22 * *Instruction: *1.@xxxx : indicates annotation *2./***** *** *****/ : stand for code in my files *3.instructions refers to code not included in my file * */ Section 1: uboot overview 大多数bootloader都分为stage1和stage2两部分,u-boot也不例外。依赖于CPU体系结构的代码(如设备初始化代码等)通常都放在stage1且可以用汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现复杂的功能,而且有更好的可读性和移植性。 1、Stage1 start.S代码结构 u-boot的stage1代码通常放在start.S文件中,他用汇编语言写成,其主要代码部分如下:==> (1)定义入口。由于一个可执行的Image必须有一个入口点,并且只能有一个全局入口,通常这个入口放在ROM(Flash)的0x0地址,因此,必须通知编译器以使其知道这个入口,该工作可通过修改连接器脚本来完成。 ==>(2)设置异常向量(Exception Vector)。 ==>(3)设置CPU的速度、时钟频率及终端控制寄存器。 ==>(4)初始化内存控制器。 ==>(5)将ROM中的程序复制到RAM中。 ==>(6)初始化堆栈。 ==>(7)转到RAM中执行,该工作可使用指令ldr pc来完成。 2、Stage2 C语言代码部分 lib_arm/board.c中的start arm boot是C语言开始的函数也是整个启动代码中C语言的主函数,同时还是整个u-boot(armboot)的主函数,该函数只要完成如下操作: ==>(1)调用一系列的初始化函数。 ==>(2)初始化Flash设备。 ==>(3)初始化系统内存分配函数。 ==>(4)如果目标系统拥有NAND设备,则初始化NAND设备。 ==>(5)如果目标系统有显示设备,则初始化该类设备。 ==>(6)初始化相关网络设备,填写IP、MAC地址等。 ==>(7)进去命令循环(即整个boot的工作循环),接受用户从串口输入的命令,然后进行相应的工作。
UBOOT详细解读
大多数bootloader都分为stage1和stage2两部分,u-boot也不例外。依赖于CPU体系结构的代码(如设备初始化代码等)通常都放在stage1且可以用汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现复杂的功能,而且有更好的可读性和移植性。 1、Stage1 start.S代码结构 u-boot的stage1代码通常放在start.S文件中,他用汇编语言写成,其主要代码部分如下:(1)定义入口。由于一个可执行的Image必须有一个入口点,并且只能有一个全局入口,通常这个入口放在ROM(Flash)的0x0地址,因此,必须通知编译器以使其知道这个入口,该工作可通过修改连接器脚本来完成。 (2)设置异常向量(Exception Vector)。 (3)设置CPU的速度、时钟频率及终端控制寄存器。 (4)初始化内存控制器。 (5)将ROM中的程序复制到RAM中。 (6)初始化堆栈。 (7)转到RAM中执行,该工作可使用指令ldr pc来完成。 2、Stage2 C语言代码部分 lib_arm/board.c中的start arm boot是C语言开始的函数也是整个启动代码中C语言的主函数,同时还是整个u-boot(armboot)的主函数,该函数只要完成如下操作: (1)调用一系列的初始化函数。 (2)初始化Flash设备。 (3)初始化系统内存分配函数。 (4)如果目标系统拥有NAND设备,则初始化NAND设备。 (5)如果目标系统有显示设备,则初始化该类设备。 (6)初始化相关网络设备,填写IP、MAC地址等。 (7)进去命令循环(即整个boot的工作循环),接受用户从串口输入的命令,然后进行相应的工作。 3、U-Boot的启动顺序(示例,其他u-boot版本类似) cpu/arm920t/start.S @文件包含处理 #include
uboot启动代码详解
·1 引言 在专用的嵌入式板子运行GNU/Linux 系统已经变得越来越流行。一个嵌入式Linux 系统从软件的角度看通常可以分为四个层次: 1. 引导加载程序。固化在固件(firmware)中的boot 代码,也就是Boot Loader,它的启动通常分为两个阶段。 2. Linux 内核。特定于嵌入式板子的定制内核以及内核的启动参数。 3. 文件系统。包括根文件系统和建立于Flash 内存设备之上文件系统,root fs。 4. 用户应用程序。特定于用户的应用程序。有时在用户应用程序和内核层之间可能还会包括一个嵌入式图形用户界面。常用的嵌入式GUI 有:MicroWindows 和MiniGUI 等。 引导加载程序是系统加电后运行的第一段软件代码。回忆一下PC 的体系结构我们可以知道,PC 机中的引导加载程序由BIOS(其本质就是一段固件程序)和位于硬盘MBR 中的OS Boot Loader(比如,LILO 和GRUB 等)一起组成。BIOS 在完成硬件检测和资源分配后,将硬盘MBR 中的Boot Loader 读到系统的RAM 中,然后将控制权交给OS Boot Loader。Boot Loader 的主要运行任务就是将内核映象从硬盘上读到RAM 中,然后跳转到内核的入口点去运行,也即开始启动操作系统。 而在嵌入式系统中,通常并没有像BIOS 那样的固件程序(注,有的嵌入式CPU 也会内嵌一段短小的启动程序),因此整个系统的加载启动任务就完全由Boot Loader 来完成。比如在一个基于ARM7TDMI core 的嵌入式系统中,系统在上电或复位时通常都从地址 0x00000000 处开始执行,而在这个地址处安排的通常就是系统的Boot Loader 程序。·2 bootloader简介 简单地说,Boot Loader (引导加载程序)就是在操作系统内核运行之前运行的一段小程序,它的作用就是加载操作系统, 实现硬件的初始化,建立内存空间的映射图,为操作系统内核准备好硬件环境并引导内核的启动。如上图所示的那样在设备的启动过程中bootloader位于最底层,首先被运行来引导操作系统运行,很容易可以看出bootloader是底层程序所以它的实现严重地依赖于硬件,特别是在嵌入式世界。因此,在嵌入式世界里建立一个通用的BootLoader几乎是不可能的。尽管如此,一些功能强大、支持硬件环境较多的BootLoader也被广大的使用者和爱好者所支持,从而形成了一些被广泛认可的、较为通用的的bootloader实现。 2.1 Boot Loader 所支持的CPU 和嵌入式板 每种不同的CPU 体系结构都有不同的Boot Loader。有些Boot Loader 也支持多种体系结构的CPU,比如U-Boot 就同时支持ARM 体系结构和MIPS 体系结构。除了依赖于CPU 的体系结构外,Boot Loader 实际上也依赖于具体的嵌入式板级设备的配置。这也就是说,对于两块不同的嵌入式板而言,即使它们是基于同一种CPU 而构建的,要想让运行在一块板子上的Boot Loader 程序也能运行在另一块板子上,通常也都需要修改Boot Loader 的源程序。 2.2 Boot Loader 的安装媒介(Installation Medium)
Uboot启动代码解析
U-Boot启动过程 开发板上电后,执行U-Boot的第一条指令,然后顺序执行U-Boot 启动函数。看一下board/smdk2410/u-boot.lds这个链接脚本,可以知道目标程序的各部分链接顺序。第一个要链接的是cpu/arm920t/start.o,那么U-Boot的入口指令一定位于这个程序中。下面分两阶段介绍启动流程: 第一阶段 1.cpu/arm920t/start.S 这个汇编程序是U-Boot的入口程序,开头就是复位向量的代码。_start: b reset //复位向量 ldr pc, _undefined_instruction ldr pc, _software_interrupt ldr pc, _prefetch_abort ldr pc, _data_abort ldr pc, _not_used ldr pc, _irq //中断向量 ldr pc, _fiq //中断向量 … /* the actual reset code */ reset: //复位启动子程序
/* 设置CPU为SVC32模式 */ mrs r0,cpsr bic r0,r0,#0x1f orr r0,r0,#0xd3 msr cpsr,r0 /* 关闭看门狗 */ ………… relocate: /* 把U-Boot重新定位到RAM */ adr r0, _start /* r0是代码的当前位置 */ ldr r1, _TEXT_BASE /*_TEXT_BASE是RAM中的地址 */ cmp r0, r1 /* 比较r0和r1,判断当前是从Flash启动,还是RAM */ beq stack_setup /* 如果r0等于r1,跳过重定位代码 */ /* 准备重新定位代码 */ ldr r2, _armboot_start ldr r3, _bss_start sub r2, r3, r2 /* r2 得到armboot的大小 */ add r2, r0, r2 /* r2 得到要复制代码的末尾地址 */ copy_loop: /* 重新定位代码 */ ldmia r0!, {r3-r10} /*从源地址[r0]复制 */
u_boot初始化流程
U-Boot启动代码分析 U-boot的启动顺序分为stage1和stage2两部分,见下图。依赖于CPU体系结构的代码(如设备初始化代码等)通常放在stage1中用汇编语言实现,而在stage2则通常由C语言实现,这样可以实现复杂的功能,而且有更好的可读性和移植性。以下主要梳理了stage2阶段函数的调用顺序以及每个函数的功能。 U-boot的启动顺序 C语言代码部分lib_arm/board.c中的start_armboot既是C语言开始的函数也是整个启动代码中C语言的主函数,同时还是整个U-boot的主函数,该函数只要完成如下操作。 (1)调用一系列的初始化函数。 (2)初始化Flash设备。 (3)初始化系统内存分配函数 (4)如果目标系统拥有NAND设备,则初始化NAND设备 (5)如果目标系统有显示设备,则初始化该类设备。 (6)初始化相关网络设备,填写IP、MAC地址等。 (7)进入命令循环(即整个Boot的工作循环),接收用户从串口输入的命令,然后进行相应的工作。 下面结合源码分析函数调用顺序以及函功能: 代码: void start_armboot (void) { init_fnc_t **init_fnc_ptr; char *s; int mmc_exist = 0;
#if defined(CONFIG_VFD) || defined(CONFIG_LCD) unsigned long addr; #endif 注释:从U-boot stage1中start.s程序调到这里执行start_armboot函数,这一段代码进行了变量声明,其中定义了一个名为init_fnc_ptr的双重指针。如果CONFIG_VFD或者CONFIG_LCD被定义了则声明一无符号长整型变量addr,本开发板中没有定义无需声明addr。 代码: /* Pointer is writable since we allocated a register for it */ gd = (gd_t*)(_armboot_start - CONFIG_SYS_MALLOC_LEN - sizeof(gd_t)); /* compiler optimization barrier needed for GCC >= 3.4 */ __asm__ __volatile__("": : :"memory"); //内存屏障,告诉编译器内存被修改过了 memset ((void*)gd, 0, sizeof (gd_t)); gd->bd = (bd_t*)((char*)gd - sizeof(bd_t)); //指向gd之前 memset (gd->bd, 0, sizeof (bd_t)); // gd->flags |= GD_FLG_RELOC; monitor_flash_len = _bss_start - _armboot_start; //u-boot映像的大小其中_armboot_start为code start ,_bss_start为code + data end == BSS start. 注释: gd = (gd_t*)(_armboot_start - CONFIG_SYS_MALLOC_LEN - sizeof(gd_t));//内存强制转换,gd为全局环境变量,gd指向uboot之前的地址; memset ():void * memset(void * s,char c,size_t count)将指针s所指地址以及之后count个地址中数值赋值为c。memset ((void*)gd, 0, sizeof (gd_t))的作用为:gd整个地址的值初始化为0;memset (gd->bd, 0, sizeof (bd_t))的作用为bd地址的值初始化为0。 代码: for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) { if ((*init_fnc_ptr)() != 0) { //相当于调用指针中的一个函数,如果不为0就表示死机 hang (); } } 注释:
U_Boot第一启动阶段Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解)
Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解) Uboot启动分析笔记-----Stage1(start.S与lowlevel_init.S详解) 1 u-boot.lds 首先了解uboot的链接脚本board/my2410/u-boot.lds,它定义了目标程序各部分的链接顺序。OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") /*指定输出可执行文件为ELF格式,32为,ARM小端*/ OUTPUT_ARCH(arm) /*指定输出可执行文件为ARM平台*/ ENTRY(_start) /*起始代码段为_start*/ SECTIONS { /* 指定可执行image文件的全局入口点,通常这个地址都放在ROM(flash)0x0位置*、. = 0x00000000;从0x0位置开始 . = ALIGN(4); 4字节对齐 .text : {
cpu/arm920t/start.o (.text) board/my2440/lowlevel_init.o (.text) *(.text) } . = ALIGN(4); .rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) } . = ALIGN(4); .data : { *(.data) } /* 只读数据段,所有的只读数据段都放在这个位置*/ . = ALIGN(4); .got : { *(.got) } /*指定got段, got段式是uboot自定义的一个段, 非标准段*/ . = .; __u_boot_cmd_start = .; /*把__u_boot_cmd_start赋值为当前位置, 即起始位置*/ .u_boot_cmd : { *(.u_boot_cmd) } /* u_boot_cmd段,所有的u-boot命令相关的定义都放在这个位置,因为每个命令定义等长,所以只要以__u_boot_cmd_start为起始地址进行查找就可以很快查找到某一个命令的定义,并依据定义的命令指针调用相应的函数进行处理用户的任务*/ __u_boot_cmd_end = .; /* u_boot_cmd段结束位置,由此可以看出,这段空间的长度并没有严格限制,用户可以添加一些u-boot的命令,最终都会在连接是存放在这个位置。*/
最新Uboot移植步骤 5:NorFlash
最新Uboot移植步骤5:NorFlash 显示Flash:***failed***,说明norflash未识别,我们搜索“Flash:” 进入第一个查看 找到这个判断条件,如果flash_size>0则输出flash大小,否则输出 *** failed *** ### ERROR ### Please RESET the board ###
其中hang函数导致程序无法继续向下执行,我们只实现了nand启动肯定在这会卡住,所以我们不用这个hang 函数,直接输出flash未识别的信息就好了,改动如下: 现在来找norflash未识别的原因,进入flash_init函数 看见这样一段代码 可知,有2个函数可以检测flash的大小如果flash_detect_legacy函数不行再使用flash_get_size函数,先进入flash_detect_legacy函数看下,其结构如下: 该函数有2个,使用哪一个由宏CONFIG_FLASH_CFI_LEGACY决定,搜索该宏:
很明显,前面我们都是使用该函数进行大小检测的,而该函数无法识别flash,那我们使用新方法进行检测,进入新方法查看: 发现有很多可用调试信息,我们看看如何起用这些调试信息: 发现只要定义了_DEBUG即可启用调试信息,我们定义该宏: 在文件开始发现注释: 我们直接定义DEBUG即可,
配置,编译,下载到板子norflash: 重新上电从norflash启动,输出如下: 我们查看JEDEC PROBE:从哪来
查看norflash手册,看读取的设备ID是否正确 可以看到输出的厂家设备ID是正确的, 说明下面这个函数读取正确 那就是 函数出现错误,我们进入该函数查看:
uboot调试指南
Uboot调试参考指南 一、调试目的 Uboot的调试旨在通过观察uboot运行时状态来测试硬件问题。 二、调试步骤 1.修改代码 在uboot代码路径下,编辑uboot代码,需要做以下修改; a.修改config.mk文件,添加以下两行内容: AFLAGS += -Wa,-gdwarf2 CFLAGS += -g2 -gdwarf-2 b.修改. /arch/powerpc/lib/board.c文件 debug("Now running in RAM - U-Boot at: %08lx\n", dest_addr); printf("Now running in RAM - U-Boot at: %08lx\n", dest_addr); 将debug改为printf,如上所示。 2.编译uboot 执行make BSC9131RDB_SYSCLK100_NAND,编译uboot 3.将编译好的u-boot-nand.bin(uboot image格式)及u-boot(elf格式文件)文件拷 贝出来 4.烧录uboot 将步骤3中保存的u-boot-nand.bin烧录到目标板中,烧录过程略。 5.建立工程 a.在cw界面,点击file->import, 选择code warrior -> Power architecture ELF executable,如图1所示: 图1 建立elf工程 b.选择步骤3中保存的u-boot(elf格式文件),toolchain选择bareboard application, target OS选择none,工程名字请根据需要设置,比如我的机器上设置为example, 点击next,如图2所示: