机械自锁的分析与研究
科技信息2010年第1期
SCIENCE &TECHNOLOGY INFORMATION 科
●
0.引言
随着我国工业化的不断推进,作为各行各业都不可或缺的机械工业,也得到了前所未有的发展,大量现代化先进机械设备加速了人类社会的繁荣和进步,机械已经成为现代社会生产和服务的主要因素之一。在全球范围内,现代机械工业正在向高速、高载、高精度、高效率、低污染、低噪音等方向发展,对机械提出了更高的要求,其中机械效率成为设计者和制造者关注的重要因素之一,并且降耗节能是我国国民经济可持续发展的重要任务之一,因此,机械效率的高低成为机械的一个重要性能指标。
在对机械效率进行研究时,会遇到一种情况,那就是机械效率小于0的情况,这便是机械自锁现象,并不是机械效率小于0,这个机构就没有使用价值,本文将对机械自锁做一些相关介绍。机械自锁在机械工程中具有十分重要的作用和意义,它对机械的性能有重要影响,有时需要克服自锁,有时需要利用自锁。在碰到机械自锁时要充分考虑,一方面,在设计机械时为使机械实现某个方向的运动就要避免自锁,另一方面,有些机械需要应用自锁特性。本文将对自锁产生的条件和生活中的机械自锁现象作相关分析。
1.机械自锁的定义及产生条件
1.1自锁的定义
有些机械,从结构上原本是可以运动的,无论作用在其上的驱动力如何增大,都不能使其运动的现象,称为机械的自锁。
1.2自锁产生的条件
对于单个运动副,产生自锁的条件因运动副的不同而不同:(1)对移动副,自锁的条件是驱动力作用在摩擦锥之内:(2)对转动副,当单一的驱动力作用在转动副的摩擦圆之内时,机械自锁;(3)对螺旋副,自锁的条件是螺旋副螺纹升角小于螺旋副的摩擦角。对于整个机构,机械自锁的条件:(1)机械的效率小于0,当机械效率小于0时,机械自锁,但必须指出的是,并不是机械效率大于0机械就一定不自锁,当机构中有偶数个运动副处于自锁状态时,机械效率也大于0,但是此时机械自锁,因此可以得出一个结论,机构中只要有一个运动副自锁,不管机械总的效率是否小于0,机械自锁;(2)机械的生产阻抗力恒小于或等于0;(3)作用在构件上的有效驱动力始终小于由其引起的同方向的阻力。在分析械是否自锁时,还要根据具体情况,灵活运用机械自锁产生的条件来解决新的问题。
2.自锁的特性
2.1两面性
自锁对机械有积极的一面,螺旋千斤顶就是利用机械自锁的例子,被千斤顶顶起的重物,无论其重力有多大,都不能使支撑起重量的螺母反转,如果螺母没有自锁性能,则重物重力过大会对千斤顶造成损害。机械工业中,还有很多利用机械自锁的例子,如炮弹入膛后的闭锁装置,偏心夹具,斜面夹具等.自锁也有消极的一面,若不避免,会带来不利影响,在凸轮推杆机构中,如果不注意机械自锁的问题,推杆很可能会被卡住,影响机械运动。
2.2方向性
一个机械产生了自锁并不是机械就不能运动,而是指某一机构在满足自锁条件驱动力作用下,在一定方向上产生自锁,而其他方向上
就不一定自锁,机械的自锁现象与驱动力方向和机构构造有关,因此,机械具有方向性。
2.3实用性
工程上的机械倒转是需要避免的,避免的方法是,安装刹车机构,但该机构复杂,价格昂贵,且刹车容易产生冲击,影响使用寿命,若使用具有自锁的机械,不仅可以防倒转,而且价格低廉,结构简单,实用性强。
3.生活中自锁现象分析
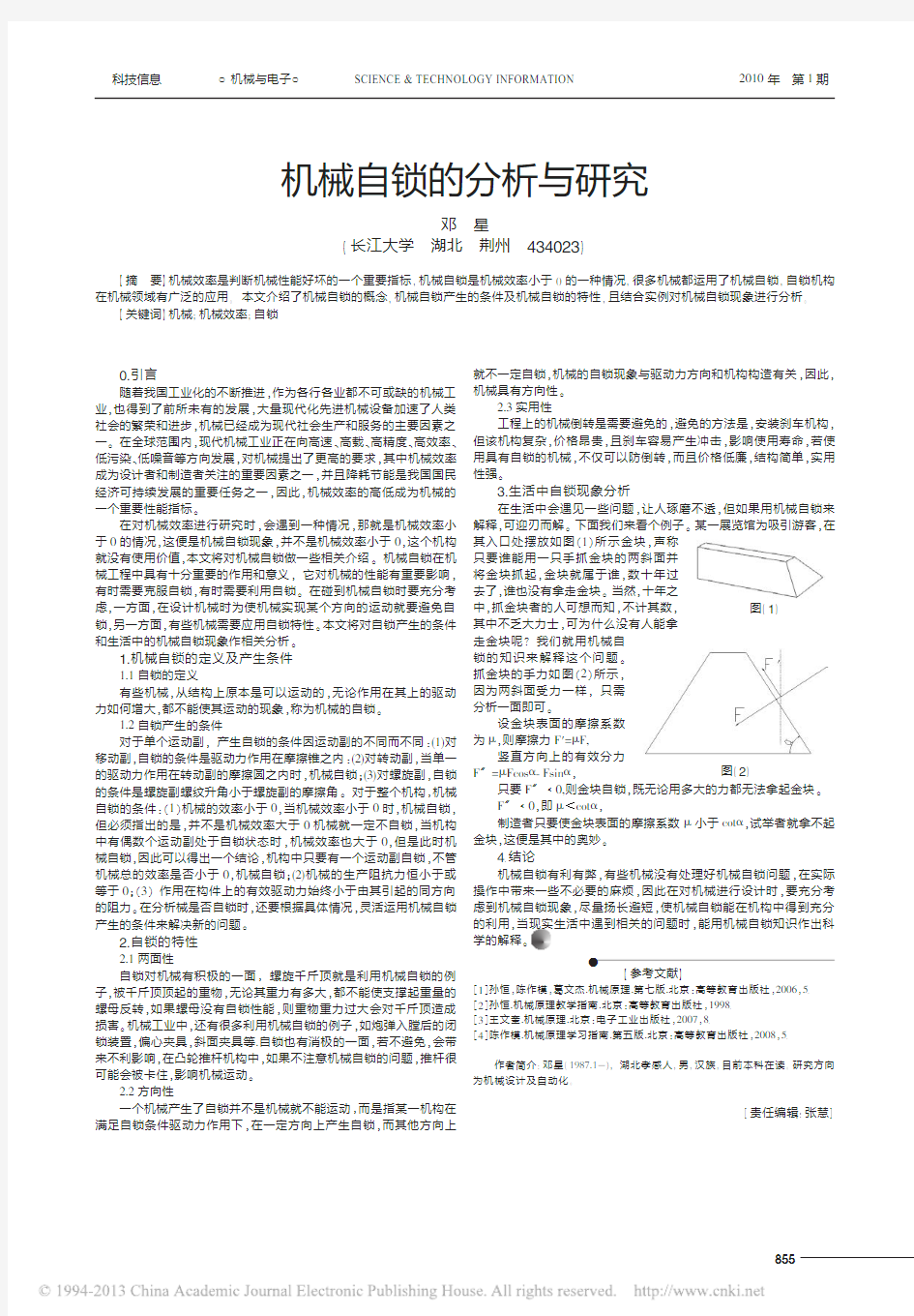
在生活中会遇见一些问题,让人琢磨不透,但如果用机械自锁来解释,可迎刃而解。下面我们来看个例子。某一展览馆为吸引游客,在其入口处摆放如图(1)所示金块,声称只要谁能用一只手抓金块的两斜面并将金块抓起,金块就属于谁,数十年过去了,谁也没有拿走金块。当然,十年之中,抓金块者的人可想而知,不计其数,其中不乏大力士,可为什么没有人能拿走金块呢?我们就用机械自锁的知识来解释这个问题。抓金块的手力如图(2)所示,因为两斜面受力一样,只需分析一面即可。
设金块表面的摩擦系数为μ,则摩擦力F ′=μF,
竖直方向上的有效分力
F 〞=μFcos α-Fsin α,
只要F 〞﹤0,则金块自锁,既无论用多大的力都无法拿起金块。
F 〞﹤0,即μ﹤cot α,
制造者只要使金块表面的摩擦系数μ小于cot α,试举者就拿不起金块,这便是其中的奥妙。
4.结论
机械自锁有利有弊,有些机械没有处理好机械自锁问题,在实际操作中带来一些不必要的麻烦,因此在对机械进行设计时,要充分考虑到机械自锁现象,尽量扬长避短,使机械自锁能在机构中得到充分的利用,当现实生活中遇到相关的问题时,能用机械自锁知识作出科学的解释。【参考文献】
[1]孙恒,陈作模,葛文杰.机械原理.第七版.北京:高等教育出版社,2006,5.[2]孙恒.机械原理教学指南.北京:高等教育出版社,1998.
[3]王文奎.机械原理.北京:电子工业出版社,2007,8.
[4]陈作模.机械原理学习指南.第五版.北京:高等教育出版社,2008,5.
作者简介:邓星(1987.1—),湖北孝感人,男,汉族,目前本科在读。研究方向为机械设计及自动化。
[责任编辑:张慧]
机械自锁的分析与研究
邓星(长江大学
湖北荆州
434023)
【摘要】机械效率是判断机械性能好坏的一个重要指标,机械自锁是机械效率小于0的一种情况,很多机械都运用了机械自锁,自锁机构在机械领域有广泛的应用。本文介绍了机械自锁的概念,机械自锁产生的条件及机械自锁的特性,且结合实例对机械自锁现象进行分析。
【关键词】机械;机械效率;自锁
图(1
)图(2)○机械与电子○855
机械原理习题习题三:效率与自锁
1.利用移动副的自锁条件推出:螺旋副中以轴向载荷Q 为主动力时(即:反行程),螺旋副的自锁条件为式?λ≤。 解:当反程时,载荷Q为主动力,P为阻力。总反力R的方向如图所示。 )tan(?λ-=Q P 由移动副自锁的条件,得其自锁条件为 反程驱动力Q与接触面法线的夹角λ必须满足: ?λ≤ 2.在题所示的机构中,已知各构件的尺寸及机构的位置,各转动副处的摩擦圆半径、移动副及凸轮高副处的摩擦角 ,凸轮为主动件,顺时针转动,作用在构件4上的工作阻力Q 的大小。试求图示位置: (1) 各运动副的反力; (2) 需施加于凸轮1上的驱动力矩1M 。 解:选取长度比例尺L (m/mm)作机构运动简图。 (1) 确定各运动副中反力的方向。 图 凸轮连杆机构考虑摩擦的机构力分析 ? λ-v λ n Q P P R R n ?
由主动件凸轮的转向,确定出机构中各个构件之间的相对运动方向,如图所示。分析各个构件受到的运动副反力和外力。构件1受到的力有R 51、R 21、1M ;构件2受到的力有R 52、R 12、R 32;构件3受到的力有R 23、R 43;构件4受到的力有R 34、R 54、Q 。 先确定凸轮高副处点B 的反力R 12的方向,与移动副反力方向确定方法相同,该力方向与接触点处的相对速度V B2B1的方向成900 +角。 再由R 51应切于运动副A 处的摩擦圆,与R 21大小相等方向相反,且对A 之矩的方向与1 方向相反,确定出R 51 的方向。R 51与R 21形成一个力偶与M 1平衡; 由于连杆3为受拉二力构件,其在D 、E 两转动副处所受两力R 23及R 43应切于该两处摩擦圆,大小相等方向相反,在一条直线上。同时,根据相对转速3432,ωω的方向,可确定出R 23及R 43的作用线和方向,亦即铰链点D 、E 的摩擦圆的内公切线。; 反力R 52应切于运动副C 处的摩擦圆,且对C 之矩的方向应与25 的方向相反,同时构件2受有的三个力R 12、R 52、 R 32应汇交于一点,由此可确定出R 52的方向线; 滑块4所受反力R 54应与V 45的方向成900 +角,它受到的三个力R 34、R 54及Q 也应汇交于一点,于是可定出R 54 的方向线。 依照以上的步骤和方法,确定出各个运动副反力的作用线和方向,如图(b )所示。 (2)求各运动副处的反力大小。分别取构件2、4为分离体,列出力平衡方程式为 构件2 0523212=++R R R ? ?? 构件4 05434=++Q R R ? ?? 而 32234334R R R R ? ???-==-= 根据上述力方程式,选取力比例尺F (N/mm),从已知力Q 画起,作出力多边形,如题57图(C )所示。由图 可得各总反力 F i i R R μ= 其中 i R 为力多边形中第i 个力的图上长度(mm)。 (3)求需施加于凸轮1上的驱动力矩1M 。由凸轮1的平衡条件可得 ()Nm l R l R M L F L μμμ21211== 式中 l 为R 21与R 51两方向线的图上距离,单位为mm 。 3.图所示为按μL =0.001m/mm 画的机构运动简图,滑块3为原动件,驱动力P=80N 。各转动副处的摩擦圆如图中所
第5章 机械的效率和自锁(有答案)
§5 机械的效率和自锁 填空题: 1.设机器中的实际驱动力为r P ,在同样的工作阻力和不考虑摩擦时的理想驱动 力为r P 0,则机器效率的计算式是η = r P 0/r P 。 2.设机器中的实际生产阻力为r Q ,在同样的驱动力作用下不考虑摩擦时能克服 的理 想生产阻力为r Q 0,则机器效率的计算式是 η= r Q /r Q 0 。 3.假设某机器由两个机构串联而成,其传动效率分别为1η和2η,则该机器的传动效率为 1η*2η 。 4.假设某机器由两个机构并联而成,其传动效率分别为1η和2η,则该机器的传动效率为 (P 1*η1+ P 2*η2)/(P 1+P 2) 。 5. 从受力观点分析,移动副的自锁条件是 外力的作用线与运动方向法线的夹角小于等于摩擦角 ;转动副的自锁条件是 外力的作用线与摩擦圆相切或相割 ;从效率观点来分析,机械自锁的条件是 效率小于等于零 。 综合题1: ^ 某滑块受力如图所示,已知滑块与地面间摩擦系数f ,试求F 与Q 分别为驱动力时的机构运动效率。 F 为驱动力:f tg 1 -=? 于是由正弦定理:) 90sin() 90sin(0 ?θ?--+= Q F 令0=?,得) 90sin(0 0θ-=Q F 因此,其效率为) 90sin()90sin() 90sin(0 0θ??θη-+--== F F 当Q 为驱动力,F 变为阻力,取?-代替上式中的? θ-
) 90sin() 90sin(90sin(0 000?θ?θη+---==)F F 第四章习题中,综合题5,要求计算该机构效率。(可直接利用前面的计算结果) ` 153077 .8==-f tg ? … 由正弦定理: )90sin()2180sin(0 210?βγ?-=--+R P 和) 90sin()2sin(012??β+=-R Q 于是 Q P *-+*---+=) 2sin()90sin()90sin()2180sin(00?β??βγ? 代入各值得:N P 7007.1430= ^ 取上式中的0 0=?,可得N P 10000=
机械原理考研讲义四(机械的效率和自锁)
第五章机械的效率和自锁 效率是衡量机械性能优劣的重要指标,而一部机械效率的高低在很大程度上取决于机械中摩擦所引起的功率损耗。研究机械中摩擦的主要目的在于寻找提高机械效率的途径。机械的自锁问题及移动副自锁条件的求解是本章的难点之一。 本章知识点串讲 【知识点1】机械效率及其计算 定义:机械的输出功与输入功之比称为机械效率,η= W r / W d。 性质:η<1(η= 1——理想机器——永动机) 表示方法: a. 功表示 η= W r / W d = 1- W f/ W d b. 功率表示 η= p r / p d = 1- p f/ p d c. 力(矩)表示 η= F0/ F= M0/ M 1)串联机器(组)的总效率等于组成该机器(组)各机械部分效率的连乘积 η=η1η2……ηK 2)对于并联机构的总效率计算就相对麻烦一点。 N r
η= (Nd1η1 + Nd2η2 + …+ NdK ηK) / (Nd1 + Nd 2 + …+ NdK) = (Nd1η1 + Nd2η2 + …+ NdK ηK) / Nd 并联机组的效率,不仅与各个机构的效率有关,而且与效率的分配有关 3)混联 兼有串联和并联的机构称为混联机构。为了计算其总效率,可先将输入功至输出功的路线弄清,然后分别计算出总的输入功率和总的输出功率,最后计算其总的机械效率。 【知识点2】机械自锁条件的确定 定义:由于摩擦的存在,沿某个方向的驱动力如何增大,也无法使受力对象产生运动的现象——称为机械的自锁。 同学们要注意的是,机械的自锁只是在一定的受力条件和受力方向下发生的,而在另外的情况下却是可动的,也就是说自锁具有方向性。 1)平面自锁条件: (1)当α>φ时,驱动力P 的作用线在摩擦角φ之外。Px > F ,即滑块加速; (2)当α=φ时,P 与R 共线。Px = F : a. 滑块等速运动——原本运动; b.静止不动——原不动,具有运动趋势。 (3)当α<φ时,驱动力P 的作用线在摩擦角φ之内。Px < F , a. 滑块减速运动减至静止——原本运动; b.静止不动——原不动,不论P 有多大。 故平面自锁条件——α≤φ,等号表示条件自锁。 N R
机械原理 平面机构的力分析、效率和自锁
第三讲平面机构的力分析、效率和自锁 平面机构的力分析知识点: 一、作用在机械上的力 1.驱动力:定义:驱使机械运动的力特征:该力与其作用点速度的方向相同或成锐角,其所作的功为正功,称为驱动功或输入功。来源:原动机加在机械上的力 2.阻抗力:定义:阻止机械产生运动的力称为阻抗力特征:该力与其作用点速度的方向相反或成钝角,其所作的功为负功,称为阻抗功。分类:生产阻力(有效阻力):有效功(输出功)有害阻力:非生产阻力:损失功 二、构件惯性力的确定(考的较少) 1、一般力学方法 (1) 作平面复合运动的构件对于作平面复合运动且具有平行于运动平面的对称面的构件(如连杆2),其惯性力系可简化为一个加在质心S2 上的惯性力F I2和一个惯性力偶矩M I2, 即 F I2 = -m2a S2 , M I2 = -J S2α2 也可将其再简化为一个大小等于F I2,而作用线偏离质心S2一距离l h2的总惯性力F′I2, l h2 = M I2/ F I2 F′I2对质心S2之矩的方向应与α2的方向相反。 (2) 作平面移动的构件如滑块3,当其作变速移动时,仅有一个加在质心S3上的惯性力 F13=-m3a S3。 (3) 绕定轴转动的构件如曲柄1,若其轴线不通过质心,当构件为变速转动时,其上作用有惯性力F I1=-m1a S1及惯性力偶矩M I1=-J S1α1,或简化为一个总惯性力F′I1;如果回转轴线通过构件质心,则只有惯性力偶矩M I1=-JS1α1。 2、质量代换法(记住定义和条件) 1.基本定义:(1)质量代换法:按一定条件将构件质量假想地用集中于若干个选定点上的集中质量来代替的方法叫质量代换法。(2)代换点:选定的点称为代换点。 (3)代换质量:假想集中于代换点上的集中质量叫代换质量。 2.应满足条件 (1)代换前后构件的质量不变。(2)代换前后构件的质心位置不变。(3)代换前后构件对质心的转动惯量不变。 三、运动副中的摩擦力的确定(受力分析为大题) 1.移动副中摩擦力的确定 、 F f21=f F N21=f v G
机械的效率和自锁(有答案)
§5 机械的效率和自锁 填空题: 1.设机器中的实际驱动力为r P ,在同样的工作阻力和不考虑摩擦时的理想驱动 力为r P 0,则机器效率的计算式是η = r P 0/r P 。 2.设机器中的实际生产阻力为r Q ,在同样的驱动力作用下不考虑摩擦时能克服 的理 想生产阻力为r Q 0,则机器效率的计算式是 η= r Q /r Q 0 。 3.假设某机器由两个机构串联而成,其传动效率分别为1η和2η,则该机器的传动效率为 1η*2η 。 4.假设某机器由两个机构并联而成,其传动效率分别为1η和2η,则该机器的传动效率为 (P 1*η1+ P 2*η2)/(P 1+P 2) 。 5. 从受力观点分析,移动副的自锁条件是 外力的作用线与运动方向法线的夹角小于等于摩擦角 ;转动副的自锁条件是 外力的作用线与摩擦圆相切或相割 ;从效率观点来分析,机械自锁的条件是 效率小于等于零 。 综合题1: 某滑块受力如图所示,已知滑块与地面间摩擦系数f ,试求F 与Q 分别为驱动力时的机构运动效率。 F 为驱动力:f tg 1 -=? 于是由正弦定理:) 90sin() 90sin(0 0?θ?--+=Q F 令0=?,得) 90sin(0 0θ-=Q F 因此,其效率为) 90sin()90sin() 90sin(0 0θ??θη-+--== F F 当Q 为驱动力,F 变为阻力,取?-代替上式中的? θ-
) 90sin() 90sin( 90 sin(0 00?θ?θη+---==)F F 第四章习题中,综合题5,要求计算该机构效率。(可直接利用前面的计算结果) 0153077.8==-f tg ? 由正弦定理: )90sin()2180sin(0 210?βγ?-=--+R P 和) 90sin()2sin(012??β+=-R Q 于是 Q P *-+*---+=) 2sin()90sin()90sin()2180sin(00?β??βγ? 代入各值得:N P 7007.1430= 取上式中的0 0=?,可得N P 10000= 于是6990.00 == P P η
机械的效率和自锁机械原理
第五章机械的效率和自锁 研究内容: 1 机械的效率 2 机械的自锁
第1讲机械的效率 5.1.1 机械效率的概念 5.1.2机械效率的计算 5.1.3机组效率的计算
机械效率的概念及意义: (1) 概念: 机械效率 η 机械损失率 ξ η=W r W d 摩擦损失是不可避免的,总有 ξ >0 和 η < 1; 机械效率反映了输入功在机械中的有效利用的程度。 (2) 意义: 降耗节能是国民经济可持续发展的重要任务之一。 机械效率的高低是机械中的一个主要性能指标。 —— 机械的输出功(W r )与输入功(W d )之比 —— 机械的损失功(W f )与输入功(W d )之比 =1?W f W d =1?ξ
机械效率的计算: 1) 以功表示的计算公式 η=W r W d =1?W f W d 2) 以功率表示的计算公式 η=P r P d =1?P f P d 3) 以力或力矩表示的计算公式 η=F 0F =M 0M 实际机械装置 η F 0 v F 机械传动装置 G v G η=P r P d =Gv G Fv F η0=Gv G F 0v F =1 即 η=理想驱动力实际驱动力=理想驱动力矩 实际驱动力矩
机组 ——由若干个机器组成的机械系统 整机 ——由若干个机构组成的整台机器 已知机组各机器的效率,便可计算该机组的总效率。 1. 串联机组 1) 功率传动特点: 前一机器的输出功率即为后一机器的输入功率。 2) 总机械效率: η=P r P d =P 1P d P 2P 1…P k P k?1 =η1η2…ηn ? 1 2 k P d P 1 P 2 P k -1 P k 串联机组模型 结论:串联机组中任一机器效率很低,整个机械效率就会极低;且串联机器的数目越多, 机械效率也越低。
第12章机械的效率__思考题及练习题解答
思考题及练习题解答 5-1机械正反行程的效率是否相同?其自锁条件是否相同?原因何在? 答:机械通常可以有正行程和反行程,它们的机械效率一般并不想等。其自锁条件不相同,一般来说,正行程不自锁,而反行程可以自锁也可以不自锁。因为一个具有自锁性的机械,只是在满足自锁条件的驱动力的作用下,在一定运动方向上产生自锁,而在其它运动方向上则不一定自锁。而正反行程力的方向不同。 5-2 当作用在转动副中轴颈上的外力为一单力,并分别作用在其摩擦圆之内、之外或相切时,轴颈将作何种运动?当作用在转动副中轴颈上的外力为一力偶矩时,也会发生自锁吗? 答:(1)当外力作用在摩擦圆之内时,因外力对轴颈中心的力矩始终小于它本身所引起的最大摩擦力矩,因此出现自锁现象;当外力外力作用在摩擦圆之外时,因外力对轴颈中心的力矩大于它本身所引起的摩擦力矩,故轴颈将加速运动;当外力与其摩擦圆相切时,因外力对轴颈中心的力矩等于它本身所引起的摩擦力矩,故轴颈处于临界状态,将作等速运动(当轴颈原来是转动的)或静止不动(当轴颈原来是静止的)。 (2) 当作用在转动副中轴颈上的外力为一力偶矩时,若该力偶矩小于它本身所引起的摩擦力矩,也会发生自锁。 5-3眼镜用小螺钉(M1×0.25)与其他尺寸螺钉(例如M1×1.25)相比,为什么更容易发生自动松脱现象(螺纹中经=螺纹大径-0.65×螺距)? 答:M1×0.25螺钉的螺纹中径 mm mm d 8375.0)25.065.01(2=?-= 螺纹升角 43 .58375 .025.0arctan arctan 2 ===d p α M1×1.25螺钉的螺纹中径 mm mm d 1875.7)25.165.08(2=?-=' 螺纹升角α α<===' 17 .31875 .725.1arctan arctan 2 d p 综合螺旋副的自锁条件可知,眼镜用小螺钉较其它尺寸螺钉更容易发生自动松脱现象。 5-4 通过对串联机组及并联机组的效率计算,对设计机械传动系统有何启示? 答:通过对串联机组及并联机组的效率计算,我们希望尽可能提高串联机组中任意机器的效率,减少串联机器的数目;在并联机组部分,着重提高传递功率大的传动线路的效率。 5-5 对于图示四杆机构,设P 为主动力,Q 为工作阻力,各移动副处的摩擦角为φ,各活动构件的质量忽略不计。
机械原理_效率和自锁
机械运转时: 克服生产阻力所作的功为有效功(输出功)驱动力所作的功为驱动功(输入功)克服有害阻力(如运动副中摩擦力)所作的功为损失功W d W r W f 当机械稳定运转时:W d =W r + W f 机械效率作用在机械上的力可分为驱动力、阻抗力两大类 r W W =ηf d W W W -= f W W 1-=η—输入功在机械中的有效利用程度 阻抗力 有效阻力(生产阻力) 有害阻力
d r W W =ηd f d W W W -= d f W W 1-=d r P P =ηd f d P P P -=d f P P 1- =由于损失功W f 或损失功率P f 不可能为零,所以 η<1 W f 或P f 越大,机械的效率就越低。因此在设计机械时,为了使其具有较高的机械效率,应尽量减小机械中的损耗,主要是减小运动副中的摩擦损失。 上下分别除以做功时间则为功率 η以功或功率的形式表达
F —实际驱动力 υF —驱动力作用点沿力作用线方向的速度Q —实际生产阻力 υQ —阻力作用点沿力作用线方向的速度 d r P P = η F Q F Q υυη= ∴起重装置 η以力或力矩的形式表达
为进一步简化该式,现假设该机械为理想机械,即机械中不存在摩擦。此时,F 0—为克服同样生产阻力Q 所需的理想驱动力 1F Q F 0Q 0=因为理想机械υυη=由于W f 或P f 为零F 0Q F Q υυ=∴显然F 0 < F 0d f d d r 1P P P P P ηη==-==∴F 0F υυη=F 0= F Q F Q υυη= F 0 起重装置 η以力或力矩的形式表达
第5章机械的效率和自锁(有答案)
第5章机械的效率和自锁(有答案) 本页仅作为文档封面,使用时可以删除 This document is for reference only-rar21year.March
§5 机械的效率和自锁 填空题: 1.设机器中的实际驱动力为r P ,在同样的工作阻力和不考虑摩擦时的理想驱动 力为r P 0,则机器效率的计算式是η = r P 0/r P 。 2.设机器中的实际生产阻力为r Q ,在同样的驱动力作用下不考虑摩擦时能克服 的理 想生产阻力为r Q 0,则机器效率的计算式是 η= r Q /r Q 0 。 3.假设某机器由两个机构串联而成,其传动效率分别为1η和2η,则该机器的传动效率为 1η*2η 。 4.假设某机器由两个机构并联而成,其传动效率分别为1η和2η,则该机器的传动效率为 (P 1*η1+ P 2*η2)/(P 1+P 2) 。 5. 从受力观点分析,移动副的自锁条件是 外力的作用线与运动方向法线的夹角小于等于摩擦角 ;转动副的自锁条件是 外力的作用线与摩擦圆相切或相割 ;从效率观点来分析,机械自锁的条件是 效率小于等于零 。 综合题1: 某滑块受力如图所示,已知滑块与地面间摩擦系数f ,试求F 与Q 分别为驱动力时的机构运动效率。 F 为驱动力:f tg 1-=? 于是由正弦定理:) 90sin() 90sin(0 ?θ?--+= Q F 令0=?,得) 90sin(00θ-= Q F
因此,其效率为) 90sin()90sin() 90sin(0 00θ??θη-+--==F F 当Q 为驱动力,F 变为阻力,取?-代替上式中的?,并取倒数,得 ) 90sin() 90sin(90sin(0000?θ?θη+---= =)F F 第四章习题中,综合题5,要求计算该机构效率。(可直接利用前面的计算结果) 0153077.8==-f tg ? 由正弦定理: )90sin()2180sin(0210?βγ?-=--+R P 和) 90sin()2sin(012??β+=-R Q 于是 Q P *-+*---+=) 2sin()90sin()90sin()2180sin(00?β??βγ? 代入各值得:N P 7007.1430= 取上式中的00=?,可得N P 10000= F θ?--090