一种极小化交叠的空间索引结构_MOSI_树
第36卷第10期2010年10月
北京工业大学学报JOURNAL OF BEIJING UNIVERSITY OF TECHNOLOGY
Vol.36No.10
Oct.2010
一种极小化交叠的空间索引结构—
——MOSI-树刘润涛1,郝忠孝
1,2
(1.哈尔滨理工大学计算机科学与技术学院,哈尔滨150080;2.哈尔滨工业大学计算机科学与技术学院,哈尔滨150001)
摘要:以缩小同层节点间交叠为目标,提出了一种空间数据索引结构—
——MOSI -树.通过定义数据间的序关系对数据空间分割,尽可能使空间位置相邻的数据分配在同一节点中,从而使MOSI -树的同层节点间的交叠有效减少.给出了MOSI -树的建立算法及算法的正确性、可终止性证明及时间复杂度,并给出了节点插入算法.实验结果表明,
MOSI -树上同层节点间交叠明显减少.关键词:空间索引;MOSI -树;极小化交叠;区域查询中图分类号:TP 311
文献标志码:A
文章编号:0254-0037(2010)10-1423-05
收稿日期:2008-09-22.
基金项目:国家自然科学基金资助项目(10571037);黑龙江省自然科学基金资助项目(F200601);黑龙江省教育厅资助项
目(11511027).
作者简介:刘润涛(1961—),男,黑龙江东宁人,教授.
空间数据的快速索引是海量数据有效管理的关键技术,其性能的好坏决定了整个空间数据库系统的
运行效率.R-树[1]
是一种有效的动态空间索引结构,
已广泛应用于空间数据的处理中.由于R-树允许兄弟节点间相互重叠及覆盖存在,因此,对于精确匹配查询会产生多路查询问题,从而大大影响查询速度.
减少中间节点最小外包矩形(minimum bounding rectangle ,MBR )间的覆盖和重叠是提高R-树查询性能的关键.为此,Bechmann 等[2]给出了R *-树,采用节点强制重新插入的方法来提高检索性能,但是却增加了
CPU 代价[3];Hung 等[4]给出了Compact R-树;Lee 等[5]从极小化交叠角度给出了构造R -树的算法.这
些研究产生了多种R-树的变形.张军旗等
[6]
、刘兵等[7]
运用聚类方法研究了度量空间的索引问题.周学
海等[8]
给出了一种多维空间数据的索引结构.本文针对R -树的缺点,提出了一种特殊的空间索引结
构———MOSI -树,以尽量减少兄弟节点间的交叠为目标,通过定义空间中数据间的序关系对数据空间分割,尽可能使空间位置相邻的数据分配在一个节点中,从而使记载数据空间中所有数据的树结构的同层节点间交叠尽可能减少,
使树结构具有更高的检索效率.该结构中兄弟节点之间的交叠明显减少,不增加数据量,
从而使查询速度得到提高.同时,该索引结构易于推广到高维空间.1相关定义及算法
在MOSI -树索引结构中,对空间物体采用其MBR
[1]
作为近似表示.
假设有n 个物体,其外包矩形为:{I i |I i 的左上角点为(a i
x ,a i y ),I i 的右下角点为(b i x ,b i y )}n i =1.其中I i 是
第i 个物体的最小外包矩形,
用其左上角点和右下角点表示.定义1设I i 、I j (i ≠j )是2个不同物体的最小外包矩形,若下面4个条件之一成立:
1)a i y >a j y ;
2)a i y =a j y 时,
a i x >a j x ;3)a i y =a j y 且a i x =a j x 时,
b i y >b j y ;
北京工业大学学报2010年
4)a i y =a j y 且a i x =a j x ,b i y =b j y 时,b i x >b j x ;则称I i 按y 坐标大于I j ,记作I i >y
I j .
定义2
设I i 、I j (i ≠j )是2个不同物体的最小外包矩形,若下面4个条件之一成立:
1)a i x >a j x ;
2)a i x =a j x 时,a i y >a j y ;
3)a i y =a j y 且a i x =a j x 时,b i x >b j x ;4)a i y =a j y 且a i x =a j x ,b i x =b j x 时,b i x >b j x ;
则称I i 按x 坐标大于I j ,记作I i >x I j .
定义1和定义2在二维欧氏空间中定义了2种数据间的序关系.通过这些序关系,对数据空间进行分割可使大部分空间位置相邻的数据分在一个节点中,从而使记载数据空间中所有数据的树结构的同层节点间交叠尽可能减少,使树结构具有更高的检索效率.
给定n 个空间数据的MBR ,记录于三维数组I (2,
2,n )中.其中,(I (0,0,i ),I (1,0,i ))为第i 个MBR 的左上角顶点,(I (0,1,i ),I (1,1,i ))为第i 个MBR 的右下角顶点,排序算法记为x-y-Direction_Sorting_MBR (I ,n ,d level ).其中,要排序的n 个MBR 序列存储于三维数组I 中.d level 为标识变量:d level =0时,进行
x 方向排序;d level =1时,进行y 方向排序.
2
MOSI -树空间数据索引结构
2.1
节点构成
在基于对象分割的MOSI -树中有2类节点:中间节点和叶子节点.中间节点结构形式为(I ,left-pointer ,right-pointer ).其中,I 是该中间节点所包含的所有叶子节点的最小外包矩形,其左上角点为
a i (a i x ,a i y ),其右下角点为
b i (b i x ,b i y );left-pointer 是指向其左孩子节点的指针,如无左孩子,则指向null ;right-pointer 是指向其右孩子的指针,如无右孩子,则指向null .叶子节点的结构形式为(I ,元组标
识符).2.2
MOSI -
树的生成算法
图1节点的MBR 依数据分布划分的2种划分方法Fig.1
The two kinds of partitions for a node ’s MBR according to data ’s distribution
MOSI -树的生成算法思想为:给定n 个数据节点的MBR ,首先求出包含这n 个数据的MBR ,作为这棵树的根节点的I ,同时作为整个数据空间.然后,依据这些数据的分布沿x 方向或y 方向将数据空间分成2份,
使得每个部分包含个数几乎相等的数据.分别将包含这2个部分中的所有数据的MBR 求出,用于生成该树根节点的2个孩子节点的数据项I ,并建立与根节点的链接关系,从而完全确定了根节点的所有孩子节点.对根节点的MBR 依数据
分布的划分有2种分法,如图1所示.求出这2种分法下孩子节点的MBR 间的交叠面积,选择交叠面
积最小的分法为当前数据空间的分割策略.对根节点的所有孩子节点递归地实施同样的操作,直至所有数据处理完毕.
具体算法描述如下.
算法1MOSI-Tree_Creation (I ,n )/*MOSI -树生成算法*/输入:n (n 不小于2)个矩形的序列,记录在三维数组I 中;
输出:MOSI -树根节点的指针head ;
4241
第10期刘润涛,等:一种极小化交叠的空间索引结构———MOSI-树
Begin
node=malloc(sizeof node);/*为要插入的数据申请空间*/
head<-node;
call x-y-Direction_Sorting_MBR(I,n,0);/*对I中n个MBR按x方向排序*/计算节点node的MBR,记为I1;
node->I=I
1
;
n 1=「n?;n
2
=n-n
1
;/*将节点node中所含的MBR分成几乎相等的2部分*/
I
1
←I中前n1个MBR按顺序;I2←I中后n-n1个MBR按顺序;
分别计算包含I1和I2中所有MBR的MBR,记为I x left和I x right;
call x-y-Direction_Sorting_MBR(I,n,1);/*对I中n个MBR按y方向排序*/
I
1
←I中前n1个MBR按顺序;I2←I中后n-n1个MBR按顺序;
分别计算包含I1和I2中所有MBR的MBR,记为I y left和I y right;
if I y
right
∩I y left的面积≤I x right∩I x left的面积,then
node->I
right =I y
right
,node->I
left
=I y
left
;/*采用y方向的分割*/
else
node->I
right =I x
right
;node->I
left
=I x
left
;/*采用x方向的分割*/
if n
1
≥2then/*node->I leftt中包含的小矩形个数≥2*/
call MOSI-Tree_Creation(I
1,n
1
);/*递归对右孩子节点进行划分*/
else
node
left ->I=I
1
;/*将这个数据链接为节点node的左孩子*/
if n
2
≥2then/*node->I right中包含的小矩形个数≥2*/
call MOSI-Tree_Creation(I
2,n
2
);/*递归对左孩子节点进行划分*/
else
node
left ->I=I
1
;/*将这个数据链接为节点node的左孩子*/
return head;End
定理1对于输入n(n不小于2)个矩形的序列{I
i }n
i=1
,算法1能在有限步内正确完成MOSI-树的生
成,并且算法的时间复杂度不超过O(n log22n).
证明:
1)可终止性.算法对n个数据进行划分,每次都是近似于二等分均分,因此,至多需要进行1+2+ 4+…+2log2n=21+log2n-1=2n-1次划分,是有限次划分,可终止性是正确的.
2)正确性.算法中,每进行1次划分时都运用使划分后得到的2个新节点所交叠的面积最小的原则,从而使划分的结果达到了局部最优的效果.由划分过程可知,生成的MOSI-树是一棵高度平衡树.正确性是明显的.
3)算法的时间复杂度.从生成算法的描述中可以看出:求根节点的MBR需要4(n-1)次比较运算;对所给的n个矩形x和y方向进行分类,需进行2n log2n次比较运算;计算I y right、I y left、I x right和I x left需要2(「n/
2?+2)次比较运算;计算I y
right 、I y
left
、I x
right
、I x
left
、I y
right
∩I y left和I x right∩I x left的面积需常数次运算;划分过程最多重复
2n-1次,因此,该算法共需要2n log
2n+2(「n/2?+2)+2「n/2?log
2
「n/2?+…+2k|n/2k|log
2
|n/2k|次比
较运算,近似等于n log2n+O(n log22n),即算法的时间复杂度为O(n log22n).
2.3MOSI-树的节点插入
假设head为已存在的一棵MOSI-树的根节点指针,它指向该MOSI-树的根节点,I为欲插入到该
MOSI-树的数据对象的MBR,其左上角点为a i(a i
x ,a i
y
),右下角点为b i(b i
x
,b i
y
),则插入算法描述如下.
5241
北京工业大学学报2010年
算法2MOSI-Tree_Node_Insertion(I data,head)/*MOSI-树数据节点插入算法*/
输入:MOSI-树的根节点指针head和要插入数据的MBR,I data;
输出:MOSI-树的根节点指针head;
Begin
NODE=malloc(sizeof node);/*为要插入的数据申请空间*/
NODE->I=I
data ;NODE
left
=null;NODE
right
=null;node
1
←head;node=node1;
if node=null,then
node->I=I
data ;node
left
=NODE;node
right
=null;return head,end;
else if node
right
=null,then
node
right
=NODE;return head,end;
else
计算a=包含I data与node right->I的MBR∩node left->I的面积,b=包含I与node left->I的MBR ∩node right->I的面积;
if a≤b,then
node
1->I=包含I
data
与node right->I的MBR;/*修改节点node1的MBR*/
node
1
←node right;/*到节点node的右孩子节点中寻找NODE的插入地址*/ else
node->I=包含I与node
right ->I的MBR;/*修改节点node
1
的MBR*/
node
1
←node left;/*到节点node的左孩子节点中寻找NODE的插入地址*/
call MOSI-Tree_Node_Insertion(I
data ,node
1
);
End
定理2给定有n个叶子节点的MOSI-树的头节点指针和要插入节点的最小外包矩形I
data
,算法2能在有限步内正确地完成新节点的插入,并且算法的时间复杂度为O(log2n).
证明:
1)可终止性.从MOSI-树的生成算法可知:树的高度k=「log
2
n?,而节点插入算法中,只对k个中间节点进行修改,因此,算法在有限步内终止.
2)正确性.算法中为要插入的节点寻找插入地址时,运用了使插入该节点后兄弟节点间的交叠面积最小的原则,从而使该节点插入后,MOSI-树仍然保持原有的特性,即插入该节点的结果达到了局部最优的效果.当然,当很多次插入节点后有可能破坏它是一棵高度平衡树的性质,可以采用重构索引的方法解决这个问题.
3)算法的时间复杂度.插入1个节点共需修改k个中间节点.修改1个中间节点需要常数时间,因此,共需要的时间为ck,即算法的时间复杂度为O(log2n).
3MOSI-树中各层节点上的交叠实验
先给出反映MOSI-树中第i层节点的交叠程度的量———交叠率的概念.
第i层节点间的交叠率=第i层上所有节点的MBR所交叠的面积/第i层上所有节点的MBR的面积的总和.
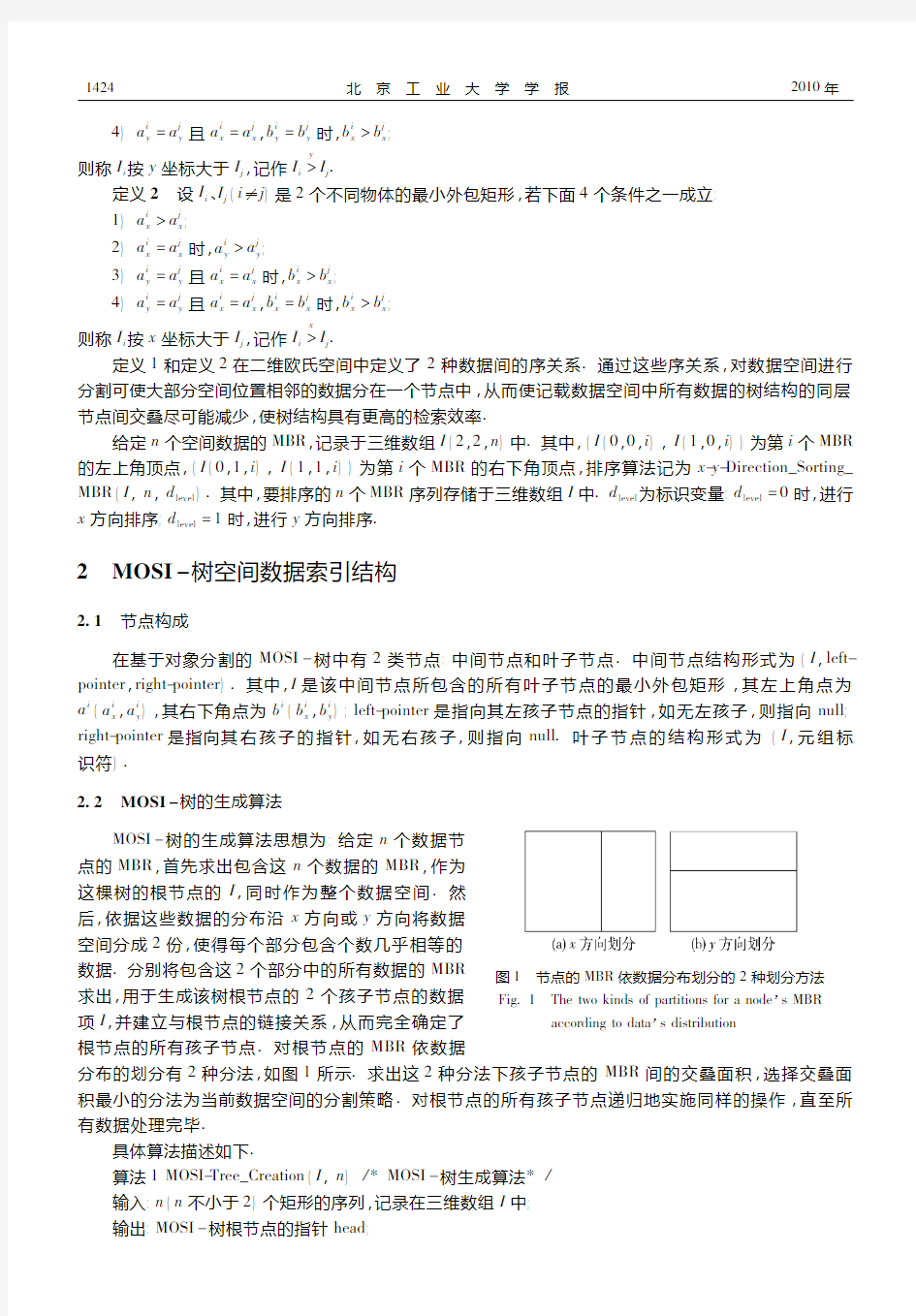
分别对372个和4096个随机生成的空间数据运用Visual C++语言进行编程测试,将本文给出的索引结构与OMT[5]方法中每一层节点的交叠率加以比较.MOSI-树分别有7层和13层节点.图2是2种方法下各层节点的交叠率比较.从图中可以清楚地看出,用本文给出的MOSI-树上各层节点的交叠率比用OMT方法生成的树上各层节点的交叠明显减少.
6241
第10期刘润涛,等:一种极小化交叠的空间索引结构———MOSI -
树图2
MOSI -树和OMT 方法构造的树上各层节点的交叠率比较
Fig.2
The overlap ratio comparison on every level of MOSI-tree and OMT method
4结束语
R-树是目前最流行的空间数据索引方法之一,它是一种完全动态的空间索引结构,其插入、删除及查
询等操作可同时进行.它的致命弱点之一就是同一层节点交叠大小难以有效缩小,因此,对于精确匹配查
询,它会使查询的范围增大,从而增加查询的时间,降低查询的效率.本文针对这个问题,以降低兄弟节点间的交叠为目标,通过定义空间中数据间的序关系对数据空间分割,结合树R -树思想,提出了一种空间
数据索引结构———MOSI -树.参考文献:
[1]ANTONIN Guttmann.R-trees :a dynamic index structure for spatial searching [C ]∥Proc of the ACM SIGMOD International
Conference on Management of Data.New York :ACM Publisher ,1984:45-57.
[2]BECHMANN N ,KRIEGEL H P ,SCHNEIDER R ,et al.The R *-tree :an efficient and robust access method for points and
rectangles [C ]∥Proc of the ACM SIGMOD international conference on management of data.New York :ACM Publisher ,1990:322-331.
[3]张明波,陆锋,申排伟,等.R 树家族的演变和发展[J ].计算机学报,2005,28(3):289-300.
ZHANG Ming-bo ,LU Feng ,SHEN Pai-wei ,et al.The evolvement and progress of R-tree family [J ].Chinese Journal of Computer ,2005,28(3):289-300.(in Chinese )
[4]HUNG P W ,LIN H Y.Optimizing storage utilization in R-tree dynamic index structure for spatial databases [J ].Journal of
Systems and Software ,2001,55(3):291-299.
[5]LEE T ,LEE Sukho.OMT :overlap minimizing top-down bulk loading algorithm for R-tree [J ].Advanced Information Systems
Engineering ,2003,7:69-72.
[6]张军旗,周向东,王梅,等.基于聚类分解的高维度量空间索引B +-tree [J ].软件学报,2008,19(6):1401-1412.
ZHANG Jun-qi ,ZOU Xiang-dong ,WANG Mei ,et al.Clustering splitting based high dimensional metric index B +-tree [J ].Journal of Software ,
2008,19(6):1401-1412.(in Chinese )[7]刘兵,严和平,段江娇,等.度量空间一种自底向上索引树构造算法[J ].计算机研究与发展,2006,43(9):1651-1657.
LIU Bing ,YAN He-ping ,DUAN Jiang-jiao ,et al.A bottom-up distance-based index tree for metric space [J ].Journal of Computer Research and Development ,2006,43(9):1651-1657.(in Chinese )
[
8]周学海,李曦,徐海燕,等.多维向量动态索引结构研究[J ].软件学报,2002,13(4):768-773.ZHOU Xue-hai ,LI Xi ,XU Hai-yan ,et al.Research on indexing structure for multi-dimensional vectors [J ].Journal of Software ,2002,13(4):768-773.(in Chinese )(下转第1432页)
7
241
2341
北京工业大学学报2010年(3):397-418.
[8]LI J,MIAO S F,ZHANG W.Analysis on bifurcations of multiple limit cycles for a parametrically and externally excited mechanical system[J].Chaos,Solitons and Fractals,2007,31(4):960-976.
[9]LI J,TIAN Y,ZHANG W,et al.Bifurcation of multiple limit cycles for a rotor-active magnetic bearings system with time-varying stiffness[J].International Journal of Bifurcation and Chaos,2008,18(3):755-778.
Phase Portraits of a Generalized Camassa-Holm Equation
LI Jing,SUN Min
(College of Applied Sciences,Beijing University of Technology,Beijing100124,China)
Abstract:In order to conduct research on traveling wave solutions of a generalized Camassa-Holm equation,a bifurcations of a generalized Camassa-Holm equation is considered in this paper by using the transformation of traveling wave,bifurcation theory of planar dynamical system and the Maple symbolic computation program.Different phase portraits of the system in different regions are obtained.
Key words:phase composition;generalized Camassa-Holm equation;transform of traveling wave
(责任编辑梁洁)(上接第1427页)
A Spatial Index Structure of Minimizing Overlap:MOSI-Tree
LIU Run-tao1,HAO Zhong-xiao1,2
(1.College of Computer Science and Technology,Harbin University of Science and Technology,Harbin150080,China;
2.College of Computer Science and Technology,Harbin Institute of Technology,Harbin150001,China)Abstract:An index structure:MOSI-tree for spatial data,is proposed for the purpose of reducing the overlap among the nodes on the same level of the tree.The data,whose spatial positions are adjacent,are allocated into the same node as far as possible by partitioning the data space in orders between the data defined in this paper to make the overlap among the nodes on the same level of the tree reduce effectively.An algorithm for constructing the MOSI-tree is proposed,and the algorithm is proved to be correct.And the termination and the time complexity of the algorithm are also presented.Finally,the algorithm for node insertion is obtained.Experiment shows that the overlap among the nodes on the same level of MOSI-tree is reduced evidently.
Key words:spatial index;MOSI-tree;minimizing overlap;range query
(责任编辑梁洁)
数据结构二叉排序树的实现(用顺序和二叉链表作存储结构)课程设计
一、设计题目 1、题目:二叉排序树的实现 (用顺序和二叉链表作存储结构 ) 2、要求(功能): 1) 以回车('\n')为输入结束标志,输入数列L,生成一棵二叉排序树T; 2) 对二叉排序树T作中序遍历,输出结果; 3) 输入元素x,查找二叉排序树T,若存在含x的结点,则删除该结点,并作中序遍历(执行操作2);否则输出信息“无x”; 二、需求分析 建立排序二叉树,主要是建立节点来存储输入的数据,需要建立函数来创造排序二叉树。 该题目包括三方面的容:一个是二叉排序树的建立,而是二叉树的中序遍历,三是二叉树元素的查找并删除。 三、数据结构设计 在写算法之前,应对数据结构进行设计。本体主要会用到指针变量,插入节点函数和建立二叉树,以及中序遍历函数,还有一些输入输出语句。 四、算法设计 算法设计思想
二插链表作存储结构:建立二插排序树采用边查找边插入的方式。查找函数采用递归的方式进行查找。如果查找成功则不应再插入原树,否则返回当前结点的上一个结点。然后利用插入函数将该元素插入原树。 对二叉树进行中序遍历采用递归函数的方式。在根结点不为空的情况下,先访问左子树,再访问根结点,最后访问右子树。 删除结点函数,采用边查找边删除的方式。如果没有查找到,则不对树做任何的修改;如果查找到结点,则分四种情况分别进行讨论:1、该结点左右子树均为空;2、该结点仅左子树为空;3、该结点仅右子树为空;4、该结点左右子树均不为空。 在进行算法设计时,应将题目分为五个函数模块: 1、中序遍历,符合升序输出 void inorder(node *&root) { if(root!=NULL) { inorder(root->left); cout<
空间索引结构(学生)分解
第七章空间索引结构 空间索引技术是从空间数据库中获取空间数据的有效方法,是提高空间数据查询和各种空间分析效率的关键技术。建立空间索引是为了缩小空间数据的搜索范围,以便在空间数据查询时不必遍历整个空间数据集,只访问空间索引数据便可快速得到一条特定的空间查询语句所请求的空间数据,或得到包含全部空间查询结果的一个较小的空间数据集。 索引文件中包含的数据称为索引数据,索引结构是索引数据的数据结构及索引创建与维护算法的总称。空间索引结构是按照空间数据在空间分布上的特性来组织和存储索引数据的索引结构。一种良好的空间索引结构应满足下列三个要求: 一、存储效率高:相对于被索引的数据集而言,索引数据的数据量应尽量小。否则,访问索引数据可能成为数据查询与更新的效率瓶颈。 二、查询效率高:空间索引结构需要选择良好的索引数据结构,设计具体的基于索引的空间访问方法(SAM Spatial Access Method),必须能够高效的实现以下几种基于位置的查询: 1、点选择:从数据集中找出包含给定点的所有空间对象。 2、范围查询:查询与给定对象间的距离小于某个给定值的所有空间对象。 3、区域(窗口)查询:查找含在区域内、与区域相交或部分位于区域中的所有空间对象。窗口是一个特殊的区域,窗口查询是GIS中最常用、最基本的查询。 4、K-最邻近查询:给定一个参照对象(点、线或区域),查询距离参照对象最近的K 1个空间对象。 5、空间关系查询:相交、相邻、包含等拓扑关系查询,方位关系和基于距离的各种查询。 6、其他查询:将满足一定空间条件的两个空间对象集合进行空间连接,空间集合运算等也是一种空间访问。 三、更新效率高:许多GIS应用中会涉及海量且不断变化的空间数据集。数据集中数据对象的增加、修改和删除将直接导致索引数据的更新,索引数据与被索引的数据集必须保持一致,才能保证基于索引数据的查询结果的正确性。索引数据的更新操作包括:插入索引项,将新数据对象的索引项添加到索引数据中;删除索引项,把数据对象的索引项从索引数据中删除;修改索引项,在索引数据中先删除再增加该数据对象的索引。数据集经常变化时,要求其索引数据的更新开销不要很大,特别要避免更新时引起的索引重组。因此,需要考虑新增索引项和删除索引项时,索引结构的快速更新能力。 很难设计一种空间索引结构同时能够提供高效的存储、高效的查询和高效的更新,实际应用中总是牺牲某些方面的效率来换取另外方面的效率。 索引结构可分为静态索引和动态索引结构。静态索引结构针对静态不变的数据,索引只建一次,不需要更新,强调索引数据的存储效率和查询效率,不强调索引更新的效率。动态索引结构强调数据在动态更新过程中保证较高的查询效率和索引空间存储效率,往往以牺牲索引更新效率为代价,这种牺牲是有限度的。 索引结构还分为内存索引和外存索引,外存索引需要考虑磁盘页面访问的效率瓶颈问题。这里主要研究面向海量空间数据的、2D空间对象的外存索引结构。 7.1空间索引分类 非空间数据库中存储的数据为结构化数据,通常以主关键字建立索引文件,以非主属性建立倒排文件,索引项按自然数序列或字符顺序排列。空间数据库存储的数据为结构复杂、不能完全结构化的空间数据,为了支持基于位置的各类查询和分析,需要以表示空间对象几何形状的坐标数据为索引字段来建立空间索引。非空间数据库的索引结构不能满足空间数据库的索引需求,必须研究和设计专用的空间索引结构和基于索引的空间访问方法(SAM Spatial Access
索引与散列
索引与散列 10-1 什么是静态索引结构?什么是动态索引结构?它们各有哪些优缺点? 【解答】 静态索引结构指这种索引结构在初始创建,数据装入时就已经定型,而且在整个系统运行期间,树的结构不发生变化,只是数据在更新。动态索引结构是指在整个系统运行期间,树的结构随数据的增删及时调整,以保持最佳的搜索效率。静态索引结构的优点是结构定型,建立方法简单,存取方便;缺点是不利于更新,插入或删除时效率低。动态索引结构的优点是在插入或删除时能够自动调整索引树结构,以保持最佳的搜索效率;缺点是实现算法复杂。 10-2 设有10000个记录对象, 通过分块划分为若干子表并建立索引, 那么为了提高搜索效率, 每一个子表的大小应设计为多大? 【解答】 每个子表的大小s = ?n? = ?10000? = 100 个记录对象。 10-3如果一个磁盘页块大小为1024 (=1K) 字节,存储的每个记录对象需要占用16字节,其中关键码占4字节,其它数据占12字节。所有记录均已按关键码有序地存储在磁盘文件中,每个页块的第1个记录用于存放线性索引。另外在内存中开辟了256K字节的空间可用于存放线性索引。试问: (1) 若将线性索引常驻内存,文件中最多可以存放多少个记录?(每个索引项8字节,其中关键码4字节,地址4字节) (2) 如果使用二级索引,第二级索引占用1024字节(有128个索引项),这时文件中最多可以存放多少个记录? 【解答】 (1) 因为一个磁盘页块大小为1024字节,每个记录对象需要占用16字节,则每个页块可存放1024 / 16 = 64个记录,除第一个记录存储线性索引外,每个页块可存储63个记录对象。又因为在磁盘文件中所有记录对象按关键码有序存储,所以线性索引可以是稀疏索引,每一个索引项存放一个页块的最大关键码及该页块的地址。若线性索引常驻内存,那么它最多可存放256 * (1024 / 8 ) = 256 * 128 = 32768个索引项,文件中可存放32768 * 63 = 2064384个记录对象。 (2) 由于第二级索引占用1024个字节,内存中还剩255K 字节用于第一级索引。第一级索引有255 * 128 = 32640个索引项,作为稀疏索引,每个索引项索引一个页块,则索引文件中可存放32640 * 63 = 2056320。 10-4 假设在数据库文件中的每一个记录是由占2个字节Array的整型数关键码和一个变长的数据字段组成。数据字段都 是字符串。为了存放右面的那些记录,应如何组织线性索 引? 【解答】 将所有字符串依加入的先后次序存放于一个连续的 存储空间store中,这个空间也叫做“堆”,它是存放所有 字符串的顺序文件。它有一个指针free,指示在堆store中当前可存放数据的开始地址。初始时free置为0,表示可从文件的0号位置开始存放。线性索引中每个索引项给出记录关键码,字符串在store中的起始地址和字符串的长度: 索引表ID 堆store 1
数据结构课程设计报告二叉排序树的实现
课程设计 课程名称数据结构课程设计 题目名称二叉排序树的实现 学院应用数学学院 专业班级 学号 学生 指导教师 2013 年 12 月 26 日
1.设计任务 1)实现二叉排序树,包括生成、插入,删除; 2)对二叉排序树进行先根、中根、和后根非递归遍历; 3)每次对树的修改操作和遍历操作的显示结果都需要在屏幕上 用树的形状表示出来。 4)分别用二叉排序树和数组去存储一个班(50人以上)的成员信 息(至少包括学号、、成绩3项),对比查找效率,并说明 为什么二叉排序树效率高(或者低)。 2. 函数模块: 2.1.主函数main模块功能 1.通过bstree CreatTree()操作建立二叉排序树。 2.在二叉排序树t过操作bstree InsertBST(bstree t,int key,nametype name,double grade)插入一个节点。 3. 从二叉排序树t过操作void Delete(bstree &p)删除任意节点。 4. 在二叉排序树t过操作bstnode *SearchBST(bstree t,keytype key)查 找节点。 5. 在二叉排序树t过操作p=SearchBST(t,key)查询,并修改节点信息 6. 非递归遍历二叉排序树。 7. 定义函数void compare()对数组和二叉排序树的查找效率进行比较比 较。 2.2创建二叉排序树CreatTree模块 从键盘中输入关键字及记录,并同时调用插入函数并不断进行插入。最后,返回根节点T。 2.3删除模块: 二叉排序树上删除一个阶段相当于删去有序系列中的一个记录,只要在删除某个节点之后依旧保持二叉排序树的性质即可。假设二叉排序树上删除节点为*p(指向节点的指针为p),其双亲节点为*f(节点指针为f)。若*p节点为叶子节点,则即左右均为空树,由于删去叶子节点不破坏整棵树的结构,则只需修改其双亲节点的指针即可;若*p节点只有左子树或只有右子树,此时只要令左子树或右子树直接成为其双亲节点*f的左子树即可;若*p节点的左子树和右子树均不为空,其一可以令*p的左子树为*f的左子树,而*p的右子树为*s的右子树,其二可以令*p的直接前驱(或直接后继)替代*p,然后再从二叉排序树中删去它的直接前驱(或直接后继)。在二叉排序树中删除一个节点的算法为 void DeleteData(bstree &t,keytype key) 若二叉排序树t中存在关键字等于key的数据元素,则删除该数据元素节点,并返回TRUE,否则返回FALSE。 2.4插入模块 二叉排序树是一种动态树表,其特点是树的结构通常不是一次生成的,而是在查找的过程中,当树中不存在关键字等于给定值得节点时在进行插入。
基于四叉树的空间索引
基于四叉树的空间索引 四叉树是建立在对E域循环分解原则上的一种层次数据结构,在计算机图形处理、图像处理及地理信息系统中有着广泛的应用,它也可以应用于对空间点的表示于索引。 分为点四叉树,区域四叉树,CIF四叉树等。 1、点四叉树主要针对空间点的存储表达和索引,对于k维数据空间,点四叉树的每个结点存储了一个空间点得信息及2^k个孩子节点的指针,且隐式地与一索引空间相对应。以该空间点为划分点,将其对应索引空间分为两两不相交的2^k个子空间,依次与它的2^k 个孩子结点相对应。对于某一个子空间的点,则分配给对应的子树。如图1是二维空间的一棵点四叉树的例子。 其点四叉树的构造过程如下。 (1)输入空间点A,由于四叉树为空,因此A作为四叉树的根节点,其隐式对应的索引空间是整个数据空间,以A为划分原点,将对应的索引空间划分成四个子空间,NE,NW,EW,SE依次为其孩子结点隐式对应的子空间。 (2)输入空间点B,B落入A的NW象限且A的NW孩子结点为空,因此B作为A的NW孩子结点;同样,C作为F,C,E分别作为A的NE,SW,SE孩子结点。 (3)输入空间D,D落入A的NW象限,继续往下查找,D落入B的NE象限且B的NE孩子结点为空,因此D作为B的NE孩子结点 优点:结构简单,对于精确匹配的点查找性能较高。 缺点:树的动态性差,删除结点处理复杂;树的结构由点的插入顺序决定,难以保证树深度的平衡;区域查找性能较差;对于非点状空间目标,必须采用目标近似与空间映射技术,效率低;不利于树的外部存储设备存储与页面调度。 2、区域四叉树 采用区域四叉树索引多维空间的点,常用方法有MX四叉树PR四叉树,避免了点四叉树动态性差,结构完全由点得插入顺序决定等缺点 2.1、MX四叉树 MX四叉树将每个空间点看成区域四叉树中得一个黑像素,或当做一方阵中的非零元素。它与区域四叉树的组织方式很相似,区别是叶结点为黑结点或空结点,且分别表示数据空间某一个位置空间点得存在与否。如图2是二维空间的一棵MX四叉树的例子。 优点:所有的点都位于叶节点,树的深度是平衡的;空间划分是等分,划分成的每个象限具有相同大小;可以采用线性四叉树的存储结构,避免指针域的存储,提高空间利用率。 缺点:插入(删除)一个点可能导致树的深度增加(减少)一层或多层,所有叶结点必须重新定位;树的深度往往很大,影响查找效率。 2.2、PR四叉树 PR四叉树叶节点或者为空,或者包含一个数据点。与MX四叉树构造过程类似,区别在于当分解到一个象限只包含一个点时,不需要继续分解使该点位于某一个子象限的最左下角。 特点:插入或删除一个点不会影响其他分支,操作简单;叶结点树及树的深度都小于MX四叉树,检索效率较高。 如图3是二维空间的一棵RP四叉树的例子。
数据结构二叉排序树实验报告
实验报告 课程名:数据结构(C语言版)实验名:二叉排序树 : 班级: 学号: 撰写时间:2014.12.18
一实验目的与要求 1.掌握二叉排序树上进行插入和删除的操作 2.利用C 语言实现该操作 二实验内容 ?对于一个线形表, 利用不断插入的方法, 建立起一株二叉排序树 ?从该二叉排序树中删除一个叶子节点, 一个只有一个子树的非叶子节,一个有两个子树的非叶子节点。 三实验结果与分析 #include
//往二叉查找树中插入结点 //插入的话,可能要改变根结点的地址,所以传的是二级指针void inseart(PNode * root,KeyType key) { //初始化插入结点 PNode p=(PNode)malloc(sizeof(Node)); p->key=key; p->left=p->right=p->parent=NULL; //空树时,直接作为根结点 if((*root)==NULL){ *root=p; return; } //插入到当前结点(*root)的左孩子 if((*root)->left == NULL && (*root)->key > key){ p->parent=(*root); (*root)->left=p; return; } //插入到当前结点(*root)的右孩子 if((*root)->right == NULL && (*root)->key < key){ p->parent=(*root);
GIS空间索引
索引方法: 网格索引——点要素(图元),线、面要素,有冗余 四叉树索引——线、面要素,有冗余 改进的四叉树索引——线、面要素 R树——空间重叠 一、网格索引,四叉树索引 在介绍空间索引之前,先谈谈什么叫“索引“。对一个数据集做”索引“,是为了提高对这个数据集检索的效率。书的”目录“就是这本书内容的”索引“,当我们拿到一本新书,想查看感兴趣内容的时候,我们会先查看目录,确定感兴趣的内容会在哪些页里,直接翻到那些页,就OK了,而不是从第一章节开始翻,一个字一个字地找我们感兴趣的内容,直到找到为止,这种检索内容的效率也太低了,如果一本书没有目录,可以想象有多么不方便…可见书的目录有多重要,索引有多重要啊! 现在大家对索引有了感性认识,那什么是“空间索引“呢?”空间索引“也是”索引“,是对空间图形集合做的一个”目录“,提高在这个图形集合中查找某个图形对象的效率。比如说,我们在一个地图图层上进行矩形选择,确定这个图层上哪些图元被这个矩形所完全包含呢,在没有”空间索引“的情况下,我们会把这个图层上的所有图元,一一拿来与这个矩形进行几何上的包含判断,以确定到底哪些图元被完全包含在这个矩形内。您是不是觉得这样做很合理呢?其实不然,我们先看一个网格索引的例子:
我们对这个点图层作了网格索引,判断哪些点在这个矩形选择框内,是不需要把这个图层里所有的点都要与矩形进行几何包含运算的,只对 a,b,c,d,e,f,g这七个点做了运算。可以推想一下,如果一个点图层有十万个点,不建立空间索引,任何地图操作都将对整个图层的所有图元遍历一次,也就是要For循环10万次;建立索引将使得For循环的次数下降很多很多,效率自然提高很多! 呵呵…想必大家都知道空间索引的好处了,也不知不觉向大家介绍了点图层的网格索引,还有哪些常用的空间索引呢?这些空间索引又该如何实现呢?带着这样的问题,下面介绍几种常用的空间索引。 网格索引 网格索引就是在一个地图图层上,按每个小网格宽△w,高△h打上均匀的格网,计算每个图元所占据的网格或者所经过的网格单元集合,
数据库的存储结构(文件、记录的组织和索引技术)
数据库的存储结构(文件、记录的组织和索引技术) by 沈燕然0124141 利用课余时间自学了第6章《数据库存储结构》,对于数据 库不同层次的存储结构,文件记录组织和索引技术有了一定的 了解,在这篇札记中将会结合一些具体应用中涉及到的数据存 储和索引知识,以及通过与过去学习过的一些数据结构比较来 记录自己学习的心得体会。这些实例涉及不同的数据库系统, 如Oracle, DB2和Mysql等等,它们之间会有一些差异。不过 本文旨在探讨数据存储方面的问题,因而兼容并包地将其一并收入,凡是可能需要说明之处都会加上相应的注解。:) 1、数据库(DBS)由什么组成?——逻辑、物理和性能特征 1、什么是数据库系统(DBS)——DBS用文件系统实现 在关系模型中,我们把DBS看成关系的汇集。DBS存在的目的就是为了使用户能够简单、方便、容易地存取数据库中的数据。因此在用户的眼中,数据库也就是以某种方式相关的表的集合。用户并不需要去关心表之间关系,更不需要了解这些表是怎样存储的。但是我们现在从DBA(数据库管理员)的角度来看,情况就比那稍稍复杂一点。 实际的数据库包含许多下面列出的物理和逻辑对象: ?表、视图、索引和模式(确定数据如何组织) ?锁、触发器、存储过程和包(引用数据库的物理实现) ?缓冲池、日志文件和表空间(仅处理如何管理数据库性能) 2、什么是表空间?——表空间相当于文件系统中的文件夹。 表空间被用作数据库和包含实际表数据的容器对象之间的一层,表空间可以包含多个不同的表。用户处理的实际数据位于表中,他们并不知道数据的物理表示,这种情况有时被称为数据的物理无关性。
上图描述了一个ORACLE数据库大致的表空间组织,USER中存放主要的数据表,TEMP存放临时数据表,INDX存放索引,TOOLS存放回退段(RBS). 表空间在DB2数据库系统中是比较典型的说法,在Mysql等系统中也直接使用文件系统中文件夹的概念。新建一个表的时候可以指定它所在的表空间,至于用文件具体存储数据时如何存储这可能就是各个数据库系统的商业机密了,至少DB2是这样。另外值得关注的一点是不同于oracles对表空间的严格要求,Mysql的数据库形式相对比较简单,以文件夹的形式存放在安装目录的/data/下面,该数据库的每一个表对应两个文件,一个存放表中数据,另一个存放元数据信息,也就是建表时指明的列属性等等信息。 3、文件中的记录在物理上如何实现?——文件组织形式 在外存中,DB以文件形式组织,而文件由记录组成。文件结构由OS的文件系统提供和管理。文件组织有两种方式——定长记录格式和变长记录格式。 那种格式更好? 定长记录格式——优点是插入操作较简单。 缺点是对记录长度有硬性要求,而且有的记录可能横跨多个快,降低读写效率。 变长记录格式——优点是记录长度自由方便 缺点是记录长度差异导致删除后产生大量“碎片”,记录很难伸长,尤其“被拴记录”移动代价相当大。 中庸之道——预留空间和指针方式 记录长度大多相近——采用预留空间方法,取最大记录长为统一标准,在短记录多于空间处填特定空值或记录尾标志符。 记录长度相差很大——采用指针形式(每纪录后的指针字段把相同属性值记录链接起来)。文件中使用两种块——固定块(存放每条链中第一条记录)和溢出块(存放其 余纪录)。 3、记录在文件中怎样组织?
空间索引使用的意义及网格索引和四叉树索引简单介绍 转
空间索引使用的意义及网格索引和四叉树索引简单介绍转空间索引使用的意义及网格索引和四叉 树索引简单介绍转 空间索引使用的意义及网格索引和四叉树索引简单介绍[转载]2010-09-27 07:40在介绍空间索引之前,先谈谈什么叫"索引"。对一个数据集做"索引",是为了提高对这个数据集检索的效率。书的"目录"就是这本书内容的"索引",当我们拿到一本新书,想查看感兴趣内容的时候,我们会先查看目录,确定感兴趣的内容会在哪些页里,直接翻到那些页,就OK了,而不是从第一章节开始翻,一个字一个字地找我们感兴趣的内容,直到找到为止,这种检索内容的效率也太低了,如果一本书没有目录,可以想象有多么不方便…可见书的目录有多重要,索引有多重要啊~ 现在大家对索引有了感性认识,那什么是"空间索引"呢?"空间索引"也是"索引",是对空间图形集合做的一个"目录",提高在这个图形集合中查找某个图形对象的效率。比如说,我们在一个地图图层上进行矩形选择,确定这个图层上哪些图元被这个矩形所完全包含呢,在没有"空间索引"的情况下,我们会把这个图层上的所有图元,一一拿来与这个矩形进行几何上的包含判断,以确定到底哪些图元被完全包含在这个矩形内。您是不是觉得这样做很合理呢?其实不然,我们先看一个网格索引的例子: 我们对这个点图层作了网格索引,判断哪些点在这个矩形选择框内,是不需要把这个图层里所有的点都要与矩形进行几何包含运算的,只对a,b,c,d,e,f,g这七个点做了运算。可以推想一下,如果一个点图层有十万个点,不建立空间索引,任何地图操作都将对整个图层的所有图元遍历一次,也就是要For循环10万次;建立索引将使得For循环的次数下降很多很多,效率自然提高很多~
数据结构课程设计题目36
1、运动会分数统计 问题描述: 参加运动会的n个学校编号为1~n。比赛分成m个男子项目和w个女子项目,项目编号分别为1~m和m+1~m+w。由于各项目参加人数差别较大,有些项目取前五名,得分顺序为7,5,3,2,1;还有些项目只取前三名,得分顺序为5,3,2。哪些项目取前五名或前三名由学生自己设定。写一个统计程序产生各种成绩单和得分报表。 基本要求: (1)各项目结束时,输入前三名或前五名的项目编号、运动员姓名、校名和名次(成绩); (2)产生各学校的成绩单,内容包括每个学校所取得的每项成绩的项目号、名次(成绩)、姓名和得分,并统计各学校总分; (3)可以按学校编号、男女团体总分排序输出; (4)可以按学校编号查询学校某个项目的情况; (5)可以按项目编号查询取得前三或前五名的学校。 2、集合的并、交和差运算的程序 问题描述: 编制一个能演示执行集合的并、交和差运算的程序。 基本要求: ⑵集合的元素限定为小写字母符[′a′….′z ′],集合的大小n<27。 ⑵集合输入的形式为一个以"回车符"为结束标志的字符串,串中字符顺序不限,且允许出现重复字符或非法字符,程序应能自动滤去。 ⑶输出的运算结果字符串中将不含重复字符或非法字符。 ⑷演示程序以用户和计算机的对话方式执行。 3、长整数的加法运算 问题描述: 设计一个实现任意长的整数进行加法、减法运算的演示程序。 基本要求: 1利用链表实现长整数的存储,每个结点含一个整型变量。 2任何整型变量的范围是-(2^15-1)~(2^15-1)。 3输入和输出形式按照中国对于长整数的表示习惯,每四位一组,组间用逗号隔开。如:-2345,6789,3211; 4、一元多项式计算器 问题描述: 设有一元多项式A m(x) 和B n(x). A m(x) = A0+A1x1+A2x2+A3x3+… +A m x m B n(x) = B0+B1x1+B2x2+B3x3+… +B n x n 试求M(x)= A m(x)+B n(x)、M(x)= A m(x)-B n(x)和M(x)= A m(x)×B n(x)。 基本要求: ⑴首先判定多项式是否稀疏; ⑵分别采用顺序和链式结构实现; ⑶结果M(x)中无重复阶项和无零系数项; ⑷要求输出结果的升幂和降幂两种排列情况。 5、车厢调度问题 问题描述: 假设停在铁路调度站(如教科书中图3.1(b)所示)入口处的车厢系列的编号依次为1,2,3,…n。设计一个程序,求出所有可能由此输出的长度为n 的车厢系列。
最新数据结构练习3答案优秀文档
数据结构练习(三)参考 一、选择题 1.顺序查找法适合于存储结构为的线性表 A)哈希存储 B)顺序存储或链式存储 C)压缩存储 D)索引存储 2.一个长度为100的已排好序的表,用二分查找法进行查找,若查找不成功, 至少比较________次。 A)9 B)8 C)7 D)6 3.采用顺序查找方法查找长度为n的线性表时,平均比较次数为。A)n B)n/2 C)(n+1)/2 D)(n-1)/2 4.对线性表进行折半查找时,要求线性表必须。 A)以顺序方式存储B)以顺序方式存储,且结点按关键字有序排列 C)以链表方式存储D)以链表方式存储,且结点按关键字有序排列 5.采用二分查找法查找长度为n的线性表时,每个元素的平均查找长度为。 A)O(n2)B)O(nlog2n)C)O(n)D)O(log2n) 6.有一个长度为12的有序表R[0…11],按折半查找法对该表进行查找,在表内各元素等概率查找情况下查找成功所需的平均比较次数为。 A)35/12 B)37/12 C)39/12 D)43/12 7.有一个有序表为{1,3,9,12,32,41,45,62,75,77,82,95,99},当采用折半查找法查找关键字为82的元素时,次比较后查找成功。A)1 B.2 C)4 D)8 8.当采用分块查找时,数据的组织方式为。 A)数据分成若干块,每块内存数据有序 B)数据分成若干块,每块内数据不必有序,但块间必须有序,每块内最大(或最小)的数据组成索引块 C)数据分成若干块,每块内数据有序,每块内最大(或最小)的数据组成索引块 D)数据分成若干块,每块(出最后一块外)中的数据个数需相同 9.采用分块查找时,若线性表中共有625个元素,查找每个元素的概率相同,
用四叉树和希尔伯特曲线做空间索引
超酷算法:用四叉树和希尔伯特曲线做空间索引 阅读·四叉树, 希尔伯特曲线, 空间索引, 算法 ?Avalon探索之旅基础教程---- 简单绑定 ?Gopher China 2015 上海大会 ?Android必学-异步加载 ?Android必学-BaseAdapter的使用与优化 本文由伯乐在线 - demoZ翻译,黄利民校稿。未经许可,禁止转载! 英文出处:https://www.360docs.net/doc/938724224.html,。欢迎加入翻译组。 随着越来越多的数据和应用和地理空间相关,空间索引变得愈加重要。然而,有效地查询地理空间数据是相当大的挑战,因为数据是二维的(有时候更高),不能用标准的索引技术来查询位置。空间索引通过各种各样的技术来解决这个问题。在这篇博文中,我将介绍几种:四叉树,geohash(不要和geohashing混淆)以及空间填充曲线,并揭示它们是怎样相互关联的。 四叉树 四叉树是种很直接的空间索引技术。在四叉树中,每个节点表示覆盖了部分进行索引的空间的边界框,根节点覆盖了整个区域。每个节点要么是叶节点,有包含一个或多个索引点的列表,没有孩子。要么是内部节点,有四个孩子,每个孩子对应将区域沿两根轴对半分得到的四个象限中的一个,四叉树也因此得名。
图1 展示四叉树是怎样划分索引区域的来源:维基百科 将数据插入四叉树很简单:从根节点开始,判断你的数据点属于哪个象限。递归到相应的节点,重复步骤,直到到达叶节点,然后将该点加入节点的索引点列表中。如果列表中的元素个数超出了预设的最大数目,则将节点分裂,将其中的索引点移动到相应的子节点中去。 图2 四叉树的内部结构
查询四叉树时从根节点开始,检查每个子节点看是否与查询的区域相交。如果是,则递归进入该子节点。当到达叶节点时,检查点列表中的每一个项看是否与查询区域相交,如果是则返回此项。 注意四叉树是非常规则的,事实上它是一种字典树,因为树节点的值不依赖于插入的数据。因此我们可以用直接的方式给节点编号:用二进制给每个象限编号(左上是00,右上是10等等译者注:第一个比特位为0表示在左半平面,为1在右半平面。第二个比特位为0表示在上半平面,为1在下半平面),任一节点的编号是由从根开始,它的各祖先的象限号码串接而成的。在这个编号系统中,图2中右下角节点的编号是1101。 如果我们定义了树的最大深度,不需通过树就可以计算数据点所在节点的编号:只要把节点的坐标标准化到适当的整数区间中(比如32位整数),然后把转化后x, y坐标的比特位交错组合。每对比特指定了假想的四叉树中的一个象限。(译者注:不了解的读者可看看Z-order,它和下文的希尔伯特曲线都是将二维的点映射到一维的方法) Geohash 上述编号系统可能看起来有些熟悉,没错,就是geohash!此刻,你可以把四叉树扔掉了。节点编号,或者说geohash,包含了对于节点在树中位置我们需要的全部信息。全高树中的每个叶节点是个完整的geohash,每个内部节点代表从它最小的叶节点到最大的叶节点的区间。因此,通过查询所需的节点覆盖的数值区间中的一切(在geohash上索引),你可以有效地定位任意内部节点下的所有数据点。 一旦我们丢掉了四叉树,查询就变得复杂一点了。我们需要事先构建搜索集合而不是在树中递归地精炼搜索集合。首先,找到完全覆盖查询区域的最小前缀(或者说
东南大学2015春学期《数据结构Ⅱ》在线作业1答案
东大15春学期《数据结构Ⅱ》在线作业1答案 一、单选题(共 20 道试题,共 100 分。) 1. 在头指针为head且表长大于1的单循环链表中,指针p指向表中某个结点,若p->next->next= head,则 A. p指向头结点 B. p指向尾结点 C. p的直接后继是头结点 D. P的直接后继是尾结点 正确答案:D 2. 对于顺序存储的线性表,访问结点和增加、删除结点的时间复杂度为 A. O(n) O(n) B. O(n) O(1) C. O(1) O(n) D. O(1) O(1) 正确答案:C 3. 链栈与顺序栈相比,比较明显的优点是 A. 插入操作更加方便 B. 删除操作更加方便 C. 不会出现下溢的情况 D. 不会出现上溢的情况 正确答案:D 4. 文件中,主关键字能唯一标识 A. 一个记录
B. 一组记录 C. 一个类型 D. 一个文件 正确答案:A 5. 数据元素及其关系在计算机存储器内的表示,称为数据的 A. 逻辑结构 B. 存储结构 C. 线性结构 D. 非线性结构 正确答案:B 6. 一棵左子树为空的二叉树在先序线索化后,其中空的链域的个数是 A. 不确定 B. 0 C. 1 D. 2 正确答案:D 7. 下述哪一条是顺序存储结构的优点 A. 存储密度大 B. 插入运算方便 C. 删除运算方便 D. 可方便地用于各种逻辑结构的存储表示 正确答案:A 8. 连通网的最小生成树是其所有生成树中 A. 顶点集最小的生成树 B. 边集最小的生成树
C. 顶点权值之和最小的生成树 D. 边的权值之和最小的生成树 正确答案:D 9. 在图采用邻接表存储时,求最小生成树的 Prim 算法的时间复杂度为 A. O(n) B. O(n+e) C. O(n2) D. O(n3) 正确答案:B 10. 下列排序算法中,时间复杂度不受数据初始状态影响,恒为0(nlog2n)的是 A. 堆排序 B. 冒泡排序 C. 直接选择排序 D. 快速排序 正确答案:A 11. 在关键字序列(12,23,34,45,56,67,78,89,91)中二分查找关键字为45、89和12的结点时,所需进行的比较次数分别为 A. 4,4,3 B. 4,3,3 C. 3,4,4 D. .3,3,4 正确答案:B 12. 带行表的三元组表是稀疏矩阵的一种 A. 顺序存储结构 B. 链式存储结构 C.
北邮数据结构实验—二叉排序树
数据结构 实 验 报 告 实验名称:______二叉排序树___________ 学生姓名:____________________ 班级:_______________ 班内序号:_______________________ 学号:________________ 日期:________________
1.实验要求 根据二叉排序树的抽象数据类型的定义,使用二叉链表实现一个二叉排序树。 二叉排序树的基本功能: 1.二叉排序树的建立 2.二叉排序树的查找 3.二叉排序树的插入 4.二叉排序树的删除 5.二叉排序树的销毁 6.其他:自定义操作编写 测试main()函数测试二叉排序树的正确性 2. 程序分析 2.1 存储结构 二叉链表 2.2 程序流程(或程序结构、或类关系图等表明程序构成的内容,一般为流程图等) 2.2.1.
2.2.2.伪代码 1.从文件读取待建树元素 2.建树,若待插入元素比根节点小,向左子树前进并重复比较左子树根节点,若待插入元素比根节点大,向右子树前进并重复比较右子树根节点,直至找到空节点则插入该元素,不断插入直至不剩下元素。 3.用户选择操作。 4.若用户选择查找,则现由用户输入待查找数值。从根节点开始比较,若较小则移至左子树,若较大则移至右子树,直至关键码相等,则输出节点情况。 5.若用户选择插入,则现由用户输入待插入数值。从根节点开始比较,若较小则移至左子树,若较大则移至右子树,直至到空节点,则插入该元素。 6.若用户选择删除,则现由用户输入待删除数值。从根节点开始比较,若较小则移至左子树,若较大则移至右子树,直至关键码相等; 1).若该节点为叶子节点,则直接删除; 2).若该节点无左子树,则其双亲节点直接与其右子树根节点连接,再删除该节点; 3).若该节点有左子树,则其左子树的最右节点数值直接覆盖该节点数值,再删除最后节点。 7.若用户选择销毁,则不断执行删除操作直至不剩余节点。 8.若用户选择退出,则程序结束。 2.3 关键算法分析 关键代码即删除操作,代码如下: void Delete(BiNode* &R) { BiNode* q=new BiNode; BiNode *s=new BiNode; if(R->lch==NULL){ q=R; R=R->rch; delete q;} else if(R->rch==NULL){ q=R; R=R->lch; delete q; } else{ q=R; s=R->lch; while(s->rch!=NULL) { q=s; s=s->rch;} R->data=s->data; if(q!=R)
B -树索引的建立
数据库系统实现 实验报告 实验名称: B -树索引的建立 一、实验内容 使用B-树对数据库进行索引。按照学生ID建立起B树索引。实验需要建立两个文本文件:数据文件datafile.txt和命令文件command.txt。数据文件包含了所有需要建立检索的学生信息,文本中的每一行包含一个学生的信息。每一行将由6个空格分隔的字符段组成:ID (9位),姓(最多15个字符),名(最多
15个字符),年级(1位),专业(最多4个字符),以及邮箱地址(最多20个字符)。 二、实验分析: 三、步骤分析及流程图 步骤分析:一个具有10,000,000个记录的文本文件共计10,000,000*100B=1000MB,而内存只有50MB,50MB/4KB=50*1024 KB/4KB=12800块,每块可以存放4*1024B/100B=40个记录,每块剩余96KB,内存一共可以存放12800*40=512000个记录,一共有10,000,000个记录。 所以要进行10,000,000/512000=19.53次,即20次排序,每次排序的记录数为10,000,000/20=500,000个记录。 因此此次实验需要将文本文件分成20个子文件。分别对子文件分别进行内部排序。最后对20个排好序的子文件进行归并排序,完成排序。 故将其分为三个阶段 1.生成一个具有10,000,000个记录的文本文件data.txt,其中每个记 录由100个字节组成,其中只有一个整数类型属性A,剩余字节用0 填充。程序生成一个4个字节之内随机整数作为每条记录的属性, 剩余字节用0填充。记录写入data.txt文件中。 2.根据实验分析,将data.txt文件分为20个子文件,并且按照文件 中每个记录的属性对各个子文件进行内部排序,最终形成20个有序 的子文件data1.txt,data2,txt,…data20.txt。 3.对20个有序的子文件进行归并排序,最终形成一个有序的结果文件 result.txt。 流程图: 阶段一流程图见图1.1
结合低秩和结构化稀疏的大雾图像小目标检测
Computer Engineering and Applications 计算机工程与应用 2018,54(21)1引言运动目标检测[1]是智能视频分析的第一步,也是最关键的一步,对监视、交通监控、增强现实、车辆导航等诸多计算机视觉应用有着基础性作用。运动目标检测的基本任务是对数字图像序列进行有关操作,将运动目标像素和背景像素分离。在实际应用中,有许多信息需要在户外进行采集,户外采集信息时常常会受到天气条件的影响[2],其中大雾是一种最常见的恶劣天气之一。大雾是悬浮在近地层空气中的许多小水滴和气溶胶造成能见度小于500m 的一种天气现象。而大雾天气下 采集的图像会由于光线散射和大气微粒导致反射光衰减而被严重降质,使图像颜色偏灰白色,对比度降低。因此,提高大雾天气下目标检测精度对于室外计算机视觉系统来说具有非常重要的意义[3]。 常用的运动目标检测算法有光流法[4]、帧差法[5]和背景建模法[6]。光流法算法复杂度高且对光照变化敏感。帧差法依赖于帧间时间间隔[7]。背景建模法是建立背景模型,将待检测数据与背景模型比较以检测目标。结合低秩和结构化稀疏的大雾图像小目标检测 马杰,杨楠,张绣丹 MA Jie,YANG Nan,ZHANG Xiudan 河北工业大学电子信息工程学院,天津300401 School of Electronics and Information Engineering,Hebei University of Technology,Tianjin 300401,China MA Jie,YANG Nan,ZHANG Xiudan.Small target detection in foggy image combined with low-rank and structured https://www.360docs.net/doc/938724224.html,puter Engineering and Applications,2018,54(21):176-182. Abstract :The traditional low-rank sparse decomposition model can not be applied directly to a single image for target detection.And it ignores the spatial structure of the target pixels leading to the detection accuracy is not high.Aiming at these two problems,a small target detection algorithm in a single foggy image based on low-rank and structured sparse is proposed.Firstly,the original fog image is preprocessed to obtain the fog patch image composed of local sub-images,and the problem of small target detection is transformed into low-rank and sparse decomposition problem.Then,considering the spatial structure of the target pixels,the structured sparsity-inducing norm is introduced into matrix decomposition of the fog patch image to constrain the target.Finally,the patch images which are obtained by matrix decomposition are post-processed to obtain the background image and the target image.The experimental results on single foggy images show that the proposed algorithm ensures the integrity of the small target detection and improves the detection accuracy.Key words :small target detection;low-rank;structured sparse;inducing norm 摘要:针对传统的低秩稀疏分解模型不能直接应用到单幅图像进行目标检测,且忽略了目标像素的空间结构性导致检测精度不高等问题,提出一种基于低秩和结构化稀疏的单幅大雾图像小目标检测算法。首先,对原始大雾图像进行预处理得到由局部子图像构成的大雾补片图像,将小目标检测问题转化为低秩和稀疏分解问题。然后,考虑到目标像素间的空间结构关系,在对大雾补片图像进行矩阵分解时,引入结构化稀疏诱导范数对目标进行约束。最后,将矩阵分解得到的补片图像进行后处理得到背景图像和目标图像。通过对单幅大雾图像实验仿真表明,所提算法确保了小目标检测的完整性并且提高了检测精度。 关键词:小目标检测;低秩;结构化稀疏;诱导范数 文献标志码:A 中图分类号:TP391doi :10.3778/j.issn.1002-8331.1707-0091 基金项目:国家自然科学基金(No.61203245);河北省自然科学基金(No.F2012202027)。 作者简介:马杰(1978―),男,博士,教授,研究领域为图像处理与模式识别;杨楠(1992―),女,硕士研究生,研究领域为图像处 理,E-mail :759064413@https://www.360docs.net/doc/938724224.html, ;张绣丹(1992―),女,硕士研究生,研究领域为图像处理与模式识别。 收稿日期:2017-07-06修回日期:2017-08-27文章编号:1002-8331(2018)21-0176-07 CNKI 网络出版:2017-11-24,http∶//https://www.360docs.net/doc/938724224.html,/kcms/detail/11.2127.TP.20171124.1756.006.html 176万方数据