研究阻尼系数对二阶系统阶跃响应的影响,基于matlab仿真
系统仿真作业
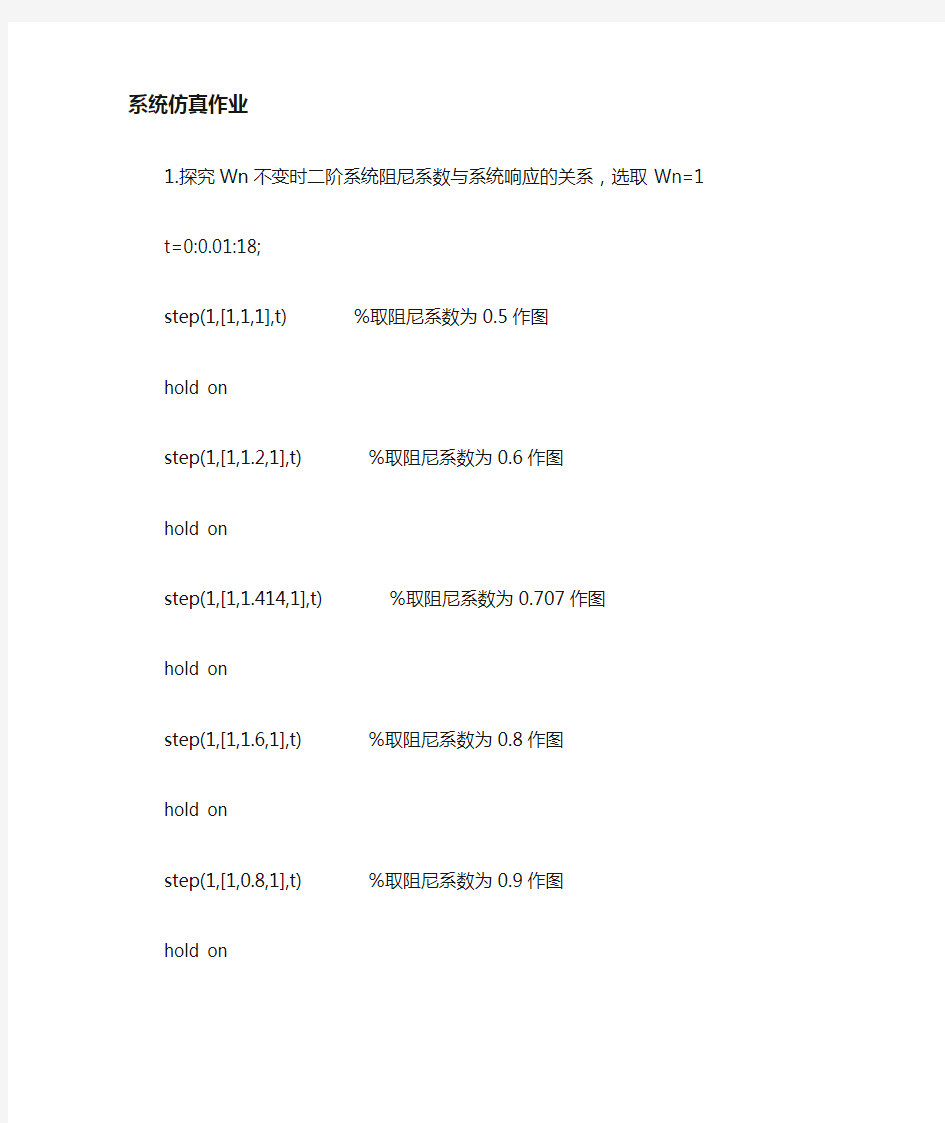
1.探究Wn不变时二阶系统阻尼系数与系统响应的关系,选取Wn=1
t=0:0.01:18;
step(1,[1,1,1],t) %取阻尼系数为0.5作图
hold on
step(1,[1,1.2,1],t) %取阻尼系数为0.6作图
hold on
step(1,[1,1.414,1],t) %取阻尼系数为0.707作图
hold on
step(1,[1,1.6,1],t) %取阻尼系数为0.8作图
hold on
step(1,[1,0.8,1],t) %取阻尼系数为0.9作图
hold on
step(1,[1,2,1],t) %取阻尼系数为1.0作图
hold on
step(1,[1,2.2,1],t) %取阻尼系数为1.1作图
hold on
结论:阻尼系数越大,系统超调量越小。
2.探究阻尼系数不变时,带宽与阻尼系数的关系,选取阻尼系数为0.5。画出bode图,求解带宽
H=tf(1,[1,1,1]) %取阻尼系数为0.5
bode(H)
grid on
3.由图得,带宽Wd约为1.24rad/s。另选用bandwidth()命令求解系统带宽。
H=tf(1,[1,1,1]) %取阻尼系数为0.5
a=bandwidth(H)
H=tf(1,[1,1.2,1]) %取阻尼系数为0.6
b=bandwidth(H)
H=tf(1,[1,1.414,1]) %取阻尼系数为0.707
c=bandwidth(H)
H=tf(1,[1,1.6,1]) %取阻尼系数为0.8
d=bandwidth(H)
H=tf(1,[1,0.8,1]) %取阻尼系数为0.9
e=bandwidth(H)
H=tf(1,[1,2,1]) %取阻尼系数为1.0
f=bandwidth(H)
H=tf(1,[1,2.2,1]) %取阻尼系数为1.1
g=bandwidth(H)
结果如下:
Transfer function: 1
---------------
s^2 + s + 1
a =1.27109968375272
Transfer function: 1
----------------
s^2 + 1.2 s + 1
b =1.14721838923872
Transfer function: 1
-----------------
s^2 + 1.414 s + 1
c = 0.99890496223485
Transfer function: 1
---------------
s^2 + 1.6 s + 1
d =0.86954619430191
Transfer function: 1
-----------------
s^2 + 1.8 s + 1
e =0.74468933384543
Transfer function: 1
-----------------
s^2 + 2 s + 1
f =0.64229001477480
Transfer function: 1
----------------
s^2 + 2.2 s + 1
g =0.56148298131333
结论:带宽与阻尼系数成反比,阻尼系数越大,带宽越小。
Matlab结构图控制系统仿真
图5. 利用 SIMULINK仿
4. 建立如图11-54所示的仿真模型,其中PID控 制器采用Simulink子系统封装形式,其内部 结构如图11-31(a)所示。试设置正弦波信号 幅值为5、偏差为0、频率为10πHz\始终相位 为0,PID控制器的参数为Kp=10.75、 Ki=1.2、Kd=5,采用变步长的ode23t算法、 仿真时间为2s,对模型进行仿真。 (6)观察仿真结果。系统放着结束后,双击仿真模型中的示波器模块,得到仿真结果。单击示波器窗口工具栏上的Autoscale按钮,可以自动调整坐标来 使波形刚好完整显示,这时的波形如图所示。 图3 2. 题操作步骤如下: (1) 打开一个模型编辑窗口。 (2) 将所需模块添加到模型中。在模块库浏览器中单击Sources,将 Clock(时钟)拖到模型编辑窗口。同样,在User-Defined Functions(用户定义模块库)中把Fcn(函数模块)拖到模型编辑窗口,在Continuous(连续系统模块库)中把 Integrator(积分模块)拖到模型编辑窗口,在Sinks中把Display模块编辑窗口。 (3) 设置模块参数并连接各个模块组成仿真模型。双击Fcn模块,打开Function Block operations中把Add模块拖到模型编辑窗口,在Sinks中把Scope模块拖到模型编辑窗口。 (3) 设置模块参数并连接各个模块组成仿真模型。先双击各个正弦源,打开其Block Parameters对话框,分别设置Frequency(频率)为2*pi、 6*pi、10*pi、 14*pi、18*pi,设置Amplitude(幅值)为1、1/3、1/5、1/7和1/9,其余参数不改变。对于求和模块,將符号列表List of signs设置为 +++++。 (4) 设置系统仿真参数。单击模型
基于MATLAB的电力系统潮流计算
基于MATLAB的电力系统潮流计算 %简单潮流计算的小程序,相关的原始数据数据数据输入格式如下: %B1是支路参数矩阵,第一列和第二列是节点编号。节点编号由小到大编写%对于含有变压器的支路,第一列为低压侧节点编号,第二列为高压侧节点%编号,将变压器的串联阻抗置于低压侧处理。 %第三列为支路的串列阻抗参数。 %第四列为支路的对地导纳参数。 %第五烈为含变压器支路的变压器的变比 %第六列为变压器是否是否含有变压器的参数,其中“1”为含有变压器,%“0”为不含有变压器。 %B2为节点参数矩阵,其中第一列为节点注入发电功率参数;第二列为节点%负荷功率参数;第三列为节点电压参数;第六列为节点类型参数,其中 %“1”为平衡节点,“2”为PQ节点,“3”为PV节点参数。 %X为节点号和对地参数矩阵。其中第一列为节点编号,第二列为节点对地%参数。 n=input('请输入节点数:n='); n1=input('请输入支路数:n1='); isb=input('请输入平衡节点号:isb='); pr=input('请输入误差精度:pr='); B1=input('请输入支路参数:B1='); B2=input('请输入节点参数:B2='); X=input('节点号和对地参数:X='); Y=zeros(n); Times=1; %置迭代次数为初始值 %创建节点导纳矩阵 for i=1:n1 if B1(i,6)==0 %不含变压器的支路 p=B1(i,1); q=B1(i,2); Y(p,q)=Y(p,q)-1/B1(i,3); Y(q,p)=Y(p,q); Y(p,p)=Y(p,p)+1/B1(i,3)+0.5*B1(i,4); Y(q,q)=Y(q,q)+1/B1(i,3)+0.5*B1(i,4); else %含有变压器的支路 p=B1(i,1); q=B1(i,2); Y(p,q)=Y(p,q)-1/(B1(i,3)*B1(i,5)); Y(q,p)=Y(p,q); Y(p,p)=Y(p,p)+1/B1(i,3);
春MATLAB仿真期末大作业
MATLAB仿真 期末大作业 姓名:班级:学号:指导教师:
2012春期末大作业 题目:设单位负反馈控制系统前向通道传递函数由)()(21s G s G 和串联,其中: ) 1(1)()(21++==s A s G s K s G A 表示自己学号最后一位数(可以是零),K 为开环增益。要求: (1)设K=1时,建立控制系统模型,并绘制阶跃响应曲线(用红色虚线,并标注坐标和标题);求取时域性能指标,包括上升时间、超调量、调节时间、峰值时间; (2)在第(1)问中,如果是在命令窗口绘制阶跃响应曲线,用in1或者from workspace 模块将命令窗口的阶跃响应数据导入Simulink 模型窗口,用示波器显示阶跃响应曲线;如果是在Simulink 模型窗口绘制阶跃响应曲线,用out1或者to workspace 模块将Simulink 模型窗口的阶跃响应数据导入命令窗口并绘制阶跃响应曲线。 (3)用编程法或者rltool 法设计串联超前校正网络,要求系统在单位斜坡输入信号作用时,速度误差系数小于等于0.1rad ,开环系统截止频率s rad c /4.4''≥ω,相角裕度大于等于45度,幅值裕度大于等于10dB 。
仿真结果及分析: (1)、(2)、将Simulink模型窗口的阶跃响应数据导入命令窗口并绘制阶跃响应曲线 通过在Matlab中输入命令: >> plot(tout,yout,'r*-') >> title('阶跃响应曲线') 即可得出系统阶跃响应曲线,如下: 求取该控制系统的常用性能指标:超调量、上升时间、调节时间、峰值时间的程序如下: G=zpk([],[0,-1],5)。 S=feedback(G,1)。
matlab控制系统仿真.
课程设计报告 题目PID控制器应用 课程名称控制系统仿真院部名称龙蟠学院 专业自动化 班级M10自动化 学生姓名 学号 课程设计地点 C208 课程设计学时一周 指导教师应明峰 金陵科技学院教务处制成绩
一、课程设计应达到的目的 应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 二、课程设计题目及要求 1.单回路控制系统的设计及仿真。 2.串级控制系统的设计及仿真。 3.反馈前馈控制系统的设计及仿真。 4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。 三、课程设计的内容与步骤 (1).单回路控制系统的设计及仿真。 (a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。 (b)画出单回路控制系统的方框图。 (c)用MatLab的Simulink画出该系统。
(d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应曲线。注明所用PID调节器公式。PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。 有积分作用单回路控制系统PID控制器取参数分别为:50 2 5 有积分作用单回路控制系统PID控制器取参数分别为:50 0 5
大比例作用单回路控制系统PID控制器取参数分别为:50 0 0 (e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响? 答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。增大比例系数将加快系统的响应,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;
基于Matlab的电力系统故障研究仿真
基于Matlab的电力系统故障分析与仿真 摘要:本文介绍了MATLAB软件在电力系统中的应用,以及利用动态仿真工具Simulink和电力系统工具箱PSD进行仿真的基本方法。在仿真平台上,以单机—无穷大系统为建模对象,通过选择模块,参数设置,以及连线,对电力系统的多种故障进行仿真分析。同时,设计一个GUI图形界面,将仿真波形清晰地显示在界面上以便比较和分析。结果表明,仿真波形基本符合理论分析,说明了MATLAB是电力系统仿真研究的有力工具。 关键词:电力系统;仿真;故障;MATLAB;GUI Abstract:This paper introduces the applications of MATLAB in power system analysis, and the basic simulation method of taking use of Simulink and PSD. On MATLAB simulation platform, take a single machine-infinite-bus system as modeling objects, by selecting the module, parameter settings, and connectingmodules to simulate and analysevariousfault of power system. At the same time, in order to facilitate comparison and analysis simulation waveform, design a GUI for showing waveform clearly.The results show that the simulation waveform in line with theoretical analysis, indicates that MATLAB is a powerful tool for researching simulation of power system. Keywords:PowerSystem。 Simulation。 Fault。 Matlab。 GUI 0 前言[1,2] 随着电力工业的发展,电力系统规划、运行和控制的复杂性亦日益增加,电力系统的生产和研究中仿真软件的应用也越来越广泛。现在,我们主要使用的电力系统仿真软件有:EMTP程序,用于电力系统电磁暂态计算,电力系统暂态过电压分析,暂态保护装置的综合选择等。PSCAD/EMTDC程序,典型应用是计算电力系统遭受扰动或参数变化时,参数随时间变化的规律。PSASP,其功能主要有稳态分析、故障分析和机电暂态分析。还有MathWorks公司开发的MATLAB软件。在MATLAB中,电力系统模型可以在Simulink环境下直接搭建,也可以进行封装和自定义模块库,充分显现了其仿真平台的优越性。更重要的是,MATLAB提供了丰富的工具箱资源,以及大量的实用模块,使我们可以更加深入地研究电力系统的行为特性。本篇论文将在熟练掌握MATLAB软件的基础上,对电力系统的故障进行建模、仿真、分析,并且设计一个GUI图形用户界面来反映故障波形。
电机学matlab仿真大作业报告
. 基于MATLAB的电机学计算机辅助分析与仿真 实验报告
一、实验内容及目的 1.1 单相变压器的效率和外特性曲线 1.1.1 实验内容 一台单相变压器,N S =2000kVA, kV kV U U N N 11/127/21=,50Hz ,变压器的参数 和损耗为008.0* ) 75(=C k o R ,0725.0*=k X ,kW P 470=,kW P C KN o 160)75(=。 (1)求此变压器带上额定负载、)(8.0cos 2滞后=?时的额定电压调整率和额定效率。 (2)分别求出当0.1,8.0,6.0,4.0,2.0cos 2=?时变压器的效率曲线,并确定最大效率和达到负载效率时的负载电流。 (3)分析不同性质的负载(),(8.0cos 0.1cos ),(8.0cos 222超前,滞后===???)对变压器输出特性的影响。 1.1.2 实验目的 (1)计算此变压器在已知负载下的额定电压调整率和额定效率 (2)了解变压器效率曲线的变化规律 (3)了解负载功率因数对效率曲线的影响 (4)了解变压器电压变化率的变化规律 (5)了解负载性质对电压变化率特性的影响 1.1.3 实验用到的基本知识和理论 (1)标幺值、效率区间、空载损耗、短路损耗等概念 (2)效率和效率特性的知识 (3)电压调整率的相关知识 1.2串励直流电动机的运行特性 1.2.1实验内容 一台16kw 、220V 的串励直流电动机,串励绕组电阻为0.12Ω,电枢总电阻为0.2Ω。电动势常数为.电机的磁化曲线近似的为直线。其中为比例常数。假设电枢电流85A 时,磁路饱和(为比较不同饱和电流对应的效果,饱和电流可以自己改变)。
MatLab与控制系统仿真(重点编程)
第 4 章 MatLab 的程序设计 MatLab 是一个工具、开发平台,同时它也是一门编程语言。与在命令窗口用交互的方式工作相比,通过程序运行来解决实际问题,其效率更高,因此,凡是复杂的、大型的应用都是以程序的方式执行。相对其它高级语言, MatLab 更简单、编程的效率更高、调试过程也更容易。 MatLab 中的程序文件是以 m 为后缀,所以通常将 MatLab 的程序文件称为 m 文件。MatLab提供了两种形式的m文件,即:脚本(Script)式m文件(就简称m文件)、函数型 m 文件。在 MatLab 中已经嵌入了一个功能强大的集成开发环境—— m 文件编辑器,用它来进行程序的编辑、修改、调试、运行等,完成应用开发工作。 4.1 MatLab 程序设计基础 通过前面内容的学习,大家对 MatLab 已经有了一个初步的认识和印象,到目前为止,我们都是在“命令”窗口中,以交互的方式运行,完成我们的工作。实际上简单的m 文件,就是一个批处理程序,它是若干条命令的集合。 例: 4.1.1 M 文件规则和属性 函数 M 文件必须遵循一些特定的规则。除此之外,它们有许多的重要属性,这其中包括: 1. 函数名和文件名必须相同。例如,函数 fliplr 存储在名为 fliplr.m 文件中。 2. MATLAB 头一次执行一函数个 M 文件时,它打开相应的文本文件并将命令编辑成存储器的内部表示,以加速执行以后所有的调用。如果函数包含了对其它函 数 M 文件的引用,它们也同样被编译到存储器。普通的脚本 M 文件不被编译,即使它们是从函数 M 文件内调用;打开脚本 M 文件,调用一次就逐行进行注释。 3. 在函数 M 文件中,到第一个非注释行为止的注释行是帮助文本。当需要帮助时,返回该文本。例如, ? help fliplr 返回上述前八行注释。 4. 第一行帮助行,名为 H1 行,是由 lookfor 命令搜索的行。 5. 函数可以有零个或更多个输入参量。函数可以有零个或更多个输出参量。
基于matlab的电力系统短路电流计算
湖北民族学院 信息工程学院 题目: 基于matlab的电力系统短路电流计算 专业:电气工程及其自动化 班级: 0308407 学号: 030840705 学生姓名: 指导教师: 2011年6 月1 日
信息工程学院课程设计任务书 年月日
信息工程学院课程设计成绩评定表
摘要 随着电力工业的发展,电力系统的规模越来越大,在这种情况下,许多大型的电力科研实验很难进行,尤其是电力系统中对设备和人员等危害最大的事故故障,尤其是短路故障,而在分析解决事故故障时要不断的实验,在现实设备中很难实现,一是实际的条件难以满足;二是从系统的安全角度来讲也是不允许进行实验的。考虑这两种情况,寻求一种最接近于电力系统实际运行状况的数字仿真工具十分重要,而MATLAB软件中的SIMULINK是用来对动态系统进行建模、仿真和分析的集成开发环境,是结合了框图界面和交互仿真能力的非线性动态系统仿真工具,为解决具体的工程问题提供了更为快速、准确和简洁的途径。 关键词:短路电流计算,MATLAB,仿真 Abstract Along with the development of the electric power industry, the scale of the power system is more and more big, in this case, many large power research is difficult to, especially in the power system, equipment and personnel to the harm such as the biggest accident, especially fault fault location, and on the analysis of the accident to solve the fault of the experiment, in the reality constantly in equipment, it is difficult to accomplish a is practical conditions to meet; The security of the system from the perspective is not allowed in the experiment. Consider the two kinds of circumstances, for one of the most close to power system actual the operation condition of digital simulation tool is very important, and MATLAB software SIMULINK is used for the dynamic system modeling, simulation and analysis of the integrated development environment, is combined with the block diagram interface and interactive simulation of nonlinear dynamic system ability of simulation tools, to solve the specific engineering problem, provides a more rapid, accurate and simple way. Keywords: short-circuit current calculation, MATLAB, the simulatio
基于MATLAB的电力系统仿真
《电力系统设计》报告题目: 基于MATLAB的电力系统仿 学院:电子信息与电气工程学院 班级: 13级电气 1 班 姓名:田震 学号: 日期:2015年12月6日 基于MATLAB的电力系统仿真 摘要:目前,随着科学技术的发展和电能需求量的日益增长,电力系统规模越来 越庞大,超高压远距离输电、大容量发电机组、各种新型控制装置得到了广泛的应用,这对于合理利用能源,充分挖掘现有的输电潜力和保护环境都有重要意义。另一方面,随着国民经济的高速发展,以城市为中心的区域性用电增长越来越快,大电网负荷中心的用电容量越来越大,长距离重负荷输电的情况日益普遍,电力系统在人们的生活和工作中担任重要角色,电力系统的稳定运行直接影响着人们的日常生活。从技术和安全上考虑直接进行电力试验可能性很小,因此迫切要求运用电力仿真来解决这些问题。 电力系统仿真是将电力系统的模型化、数学化来模拟实际的电力系统的运行,可以帮助人们通过计算机手段分析实际电力系统的各种运行情况,从而有效的了解电力系统概况。本文根据电力系统的特点,利用MATLAB的动态仿真软件Simulink搭建了无穷大电源的系统仿真模型,得到了在该系统主供电线路电源端发生三相短路接地故障并由故障器自动跳闸隔离故障的仿真结果,并分析了这一暂态过程。通过仿真结果说明MATLAB 电力系统工具箱是分析电力系统的有效工具。 关键词:电力系统;三相短路;故障分析;MATLAB仿真 目录 一.前言.............................................. 二.无穷大功率电源供电系统仿真模型构建............... 1.总电路图的设计......................................
matlab 大作业
上海电力学院 通信原理Matlab仿真 实验报告 实验名称: 8QAM误码率仿真 试验日期: 2014年 6月3日 专业:通信工程 姓名:罗侃鸣 班级: 2011112班 学号: 20112272
一、实验要求 写MATLAB程序,对图示的信号星座图完成M=8的QAM通信系统Monte Carlo仿真,在不同SNRindB=0:15时,对N=10000(3比特)个符号进行仿真。画出该QAM系统的符号误码率。 二、实验原理 1 QAM调制原理 QAM(Quadrature Amplitude Modulation)正交幅度调制技术,是用两路独立的基带信号对两个相互正交的同频载波进行抑制载波双边带调幅,利用这种已调信号的频谱在同一带宽内的正交性,实现两路并行的数字信息的传输。该调制方式通常有8QAM,16QAM,64QAM。 QAM调制实际上就是幅度调制和相位调制的组合,相位+ 幅度状态定义了一个数字或数字的组合。QAM的优点是具有更大的符号率,从而可获得更高的系统效率。通常由符号率确定占用带宽。因此每个符号的比特(基本信息单位)越多,频带效率就越高。 调制时,将输入信息分成两部分:一部分进行幅度调制;另一部分进行相位调制。对于星型8QAM信号,每个码元由3个比特组成,可将它分成第一个比特和后两个个比特两部分。前者用于改变信号矢量的振幅,后者用于差分相位调制,通过格雷编码来改变当前码元信号矢量相位与前一码元信号矢量相位之间的相位差。 QAM是一种高效的线性调制方式,常用的是8QAM,16QAM,64QAM等。当随着M 的增大,相应的误码率增高,抗干扰性能下降。 2 QAM星座图 QAM调制技术对应的空间信号矢量端点分布图称为星座图。QAM的星座图呈现星状分
MATLAB控制系统各种仿真例题(包括simulink解法)
一、 控制系统的模型与转换 1. 请将下面的传递函数模型输入到matlab 环境。 ]52)1)[(2(24)(322 33++++++=s s s s s s s G ) 99.02.0)(1(568 .0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s'); G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); G Transfer function: s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3 >> num=[1 0 0.56]; den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1) Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.99 2. 请将下面的零极点模型输入到matlab 环境。请求出上述模型的零极点,并绘制其位置。 )1)(6)(5()1)(1(8)(22 +++-+++=s s s s j s j s s G ) 2.8() 6.2)(2.3()(1 511-++=----z z z z z H ,T=0.05s >>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j]; G=zpk(z,p,8) Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1) >>pzmap(G)
MATLAB在电力系统仿真中的运用汇总
收稿日期:2006-08-25 作者简介:曾江华, 女, 长江水利委员会设计院机电处, 工程师, 硕士。 文章编号:1001-4179(2006 11-0041-02 MAT LAB 在电力系统仿真中的运用 曾江华陈晓明金伟江万里李远青 (长江水利委员会设计院, 湖北武汉 摘要:MAT LAB 是将计算、可视化、真中运用很广泛。, 由于电力系统是个复杂的系统, , 也不直观。M AT LAB 的M LAB 的POWERSY STE M BLOCK 对避雷器在有电抗器补, 。关键; ; 仿真; 运用T 文献标识码:A 1概述 M AT LAB 是由美国Mathw orks 公司开发的大型软件, 它是以 矩阵运算为基础, 把计算、可视化、程序设计融合在一个交互的工作环境中, 在此环境中可以实现工程计算、算法研究、建模和仿真、应用程序开发等。在M AT LAB 中包括了两大部分, 数学计算和工程仿真, 其中在工程仿真方面,M AT LAB 提供的软件支持涉及到各个工程领域, 并且在不断完善。M AT LAB 所具有的程序设计灵活, 直观, 图形功能强大的优点使其已经发展成为多学科, 多平台的强大的大型软件。M AT LAB 提供的S imulink 工具箱是一个在M AT LAB 环境下用于对动态系统进行建模、仿真和分析的软件包, 它提供了用方框图进行建模的接口, 与传统的仿真建模相比, 更加直观、灵活。S imulink 的作用是在程序块间的互联基础上建立
起一个系统。每个程序块由输入向量, 输出向量以及表示状态变量的向量等3个要素组成。在计算前, 需要初始化并赋初值, 程序块按照需要更新的次序分类, 然后用ODE 计算程序通过数值积分来模拟系统。M AT LAN 含有大量的ODE 计算程序, 有固定步长的, 有可变步长的, 为求解复杂的系统提供了方便。 M AT LAB 在电力系统建模和仿真的应用主要由电力系统仿真模块(P ower System Blockset 来完成, P ower System Block 是由TE QSI M 公司和魁北克水电站开发的。PS B 是在S imulink 环境下 使用的模块, 采用变步长积分法, 可以对非线性、刚性和非连续系统进行精确的仿真, 并精确地检测出断点和开关发生时刻, PS B 程序库含有代表电力网络中一般部件和设备的S imulink 程 序块, 通过PS B 可以迅速建立模型, 并立即仿真。PS B 程序块程序库中的测量程序和控制源起到电信号与S imulink 程序之间连 接作用。2电力系统元件库 电力系统元件库包括了电路、电力电子、电机和电力系统等 常用的基本元件和系统的仿真模型。其包含以下库元件: (1 电源元件。包括了交流电压源和电流源、直流电压源、可控电源及三相电源等产生电信号的元件。 (2 线路元件。包括各种线性网络电路元件和非线性网络电路元件。 (3 电力电子元件。包括如二级管、晶闸管等各种电力电子元件。 (4 电机元件。包括各种电机模型元件。 (5 连接器元件。包含有在各种不同情况下用于相互连接的元件。
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
《MATLAB与控制系统。。仿真》实验报告剖析
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一 MATLAB环境的熟悉与基本运算(一)实验二 MATLAB环境的熟悉与基本运算(二)实验三 MATLAB语言的程序设计 实验四 MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一 MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MA TLAB常用命令 表1 MA TLAB常用命令 3.MATLAB变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor 逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 4.MATLAB的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
基于MATLAB的电力系统仿真
《电力系统设计》报告 题目: 基于MATLAB的电力系统仿学院:电子信息与电气工程学院 班级: 13级电气 1 班 姓名:田震 学号: 20131090124 日期:2015年12月6日
基于MATLAB的电力系统仿真 摘要:目前,随着科学技术的发展和电能需求量的日益增长,电力系统规模越来越庞大,超高压远距离输电、大容量发电机组、各种新型控制装置得到了广泛的应用,这对于合理利用能源,充分挖掘现有的输电潜力和保护环境都有重要意义。另一方面,随着国民经济的高速发展,以城市为中心的区域性用电增长越来越快,大电网负荷中心的用电容量越来越大,长距离重负荷输电的情况日益普遍,电力系统在人们的生活和工作中担任重要角色,电力系统的稳定运行直接影响着人们的日常生活。从技术和安全上考虑直接进行电力试验可能性很小,因此迫切要求运用电力仿真来解决这些问题。 电力系统仿真是将电力系统的模型化、数学化来模拟实际的电力系统的运行,可以帮助人们通过计算机手段分析实际电力系统的各种运行情况,从而有效的了解电力系统概况。本文根据电力系统的特点,利用MATLAB的动态仿真软件Simulink搭建了无穷大电源的系统仿真模型,得到了在该系统主供电线路电源端发生三相短路接地故障并由故障器自动跳闸隔离故障的仿真结果,并分析了这一暂态过程。通过仿真结果说明MATLAB电力系统工具箱是分析电力系统的有效工具。 关键词:电力系统;三相短路;故障分析;MATLAB仿真
目录 一.前言 (4) 二.无穷大功率电源供电系统仿真模型构建 (5) 1.总电路图的设计 (5) 2.各个元件的参数设定 (6) 2.1供电模块的参数设定 (6) 2.2变压器模块的参数设置 (6) 2.3输电线路模块的参数设置 (7) 2.4三相电压电流测量模块 (8) 2.5三相线路故障模块参数设置 (8) 2.6三相并联RLC负荷模块参数设置 (9) 3.仿真结果 (9)
电机大作业(MATLAB仿真-电机特性曲线)
电机大作业 专业班级:电气XXXX 姓名:XXX 学号:XXX 指导老师:张威
一、研究课题(来源:教材习题 4-18 ) 1. 74 、R 2 0.416 、X 2 3.03 、R m 6. 2 X m 75 。电动机的机械损耗p 139W,额定负载时杂散损耗p 320W, 试求额定负载时的转差率、定子电流、定子功率因数、电磁转矩、输出转矩和效 率。 二、编程仿真 根据T 形等效电路: 3D - R Q 运用MATLAB 进行绘图。MATLAB 文本中,P N PN ,U N UN ,尺 R 1, X 1 X1 , R 2 R 2,X 2 X 2,R m Rm, X m Xm ,p pjixiesunh ao , p pzasansunhao 。定子电流I11,定子功率因数 Cosangle1,电磁转矩Te , 效率 Xiaolv 。 1.工作特性曲线绘制 MATLA 文本: R1=0.715;X 仁1.74;Rm=6.2;Xm=75;R2=0.416;X2=3.03;pjixiesu nhao=139; pzasa nsu nhao=320;p=2;m 仁 3; ns=1500;PN=17000;UN=380;fN=50; Z1=R1+j*X1; Zm=Rm+j*Xm; for i=1:2500 s=i/2500; nO=n s*(1-s); Z2=R2/s+j*X2; Z=Z1+Zm*Z2/(Zm+Z2); 有一台三相四极的笼形感应电动机, 参数为P N 17kW 、U N 380V (△联 Rm 结)、尺 0. 715 、X j lcr S
U1=UN; I1=U1/Z; l110=abs(l1); An gle 仁an gle(ll); Cosa ngle10=cos(A ngle1); P仁3*U1*l110*Cosa ngle10; l2=l1*Zm/(Zm+Z2); Pjixie=m1*(abs(I2))A2*(1-s)/s*R2; V=(1-s)*pi*fN; Te0=Pjixie/V; P20=Pjixie-pjixies un hao-pzasa nsun hao; Xiaolv0=P20/P1; P2(i)=P20; n (i)=n0; l11(i)=l110; Cosa ngle1(i)=Cosa ngle10; Te(i)=Te0; Xiaolv(i)=Xiaolv0; hold on; end figure(1) plot(P2, n); xlabel('P2[W]');ylabel(' n[rpm]'); figure(2) plot(P2,l11); xlabel('P2[W]');ylabel('l1[A]'); figure(3) plot(P2,Cosa nglel); xlabel('P2[W]');ylabel('go nglvyi nshu'); figure(4) plot(P2,Te); xlabel('P2[W]');ylabel('Te[Nm]'); figure(5) plot(P2,Xiaolv); xlabel('P2[W]');ylabel('xiaolv');
运动控制MATLAB仿真
大作业: 直流双闭环调速MATLAB仿真 运动控制技术课程名称: 名:姓电气学院院:学 自动化业:专 号:学 孟濬指导教师: 2012年6月2日
------------------------------------- -------------学浙大江 李超 一、Matlab仿真截图及模块功能描述 Matlab仿真截图如下,使用Matlab自带的直流电机模型: 模块功能描述: ⑴电机模块(Discrete DC_Machine):模拟直流电机 ⑵负载转矩给定(Load Torque):为直流电机添加负载转矩 ⑶Demux:将向量信号分离出输出信号 ⑷转速给定(Speed Reference):给定转速 ⑸转速PI调节(Speed Controller):转速PI调节器,对输入给定信号与实际信号
的差值进行比例和积分运算,得到的输出值作为电流给定信号。改变比例和积分运算系数可以得到不同的PI控制效果。 ⑹电流采样环节(1/z):对电流进行采样,并保持一个采样周期 ⑺电流滞环调节(Current Controller):规定一个滞环宽度,将电流采样值与给定值进行对比,若:采样值>给定值+0.5*滞环宽度,则输出0; 若:采样值<给定值—0.5*滞环宽度,则输出1; 若:给定值—0.5*滞环宽度<采样值<给定值+0.5*滞环宽度,则输出不变 输出值作为移相电压输入晶闸管斩波器控制晶闸管触发角 :根据输入电压改变晶闸管触发角,从而改变电机端电压。GTO⑻晶闸管斩波.⑼续流二极管D1:在晶闸管关断时为电机续流。 ⑽电压传感器Vd:测量电机端电压 ⑾示波器scope:观察电压、电流、转速波形 系统功能概括如下:直流电源通过带GTO的斩波器对直流电机进行供电,输出量电枢电流ia和转速wm通过电流环和转速环对GTO的通断进行控制,从而达到对整个电机较为精确的控制。 下面对各个部分的功能加以详细说明: (1)直流电机 双击电动机模块,察看其参数:
MATLAB控制系统与仿真设计
MATLAB控制系统与仿真 课 程 设 计 报 告 院(系):电气与控制工程学院 专业班级:测控技术与仪器1301班 姓名:吴凯 学号:1306070127
指导教师:杨洁昝宏洋 基于MATLAB的PID恒温控制器 本论文以温度控制系统为研究对象设计一个PID控制器。PID控制是迄今为止最通用的控制方法,大多数反馈回路用该方法或其较小的变形来控制。PID控制器(亦称调节器)及其改进型因此成为工业过程控制中最常见的控制器(至今在全世界过程控制中用的84%仍是纯PID调节器,若改进型包含在内则超过90%)。在PID控制器的设计中,参数整定是最为重要的,随着计算机技术的迅速发展,对PID参数的整定大多借助于一些先进的软件,例如目前得到广泛应用的MATLAB仿真系统。本设计就是借助此软件主要运用Relay-feedback法,线上综合法和系统辨识法来研究PID控制器的设计方法,设计一个温控系统的PID控制器,并通过MATLAB中的虚拟示波器观察系统完善后在阶跃信号下的输出波形。 关键词:PID参数整定;PID控制器;MATLAB仿真。 Design of PID Controller based on MATLAB Abstract This paper regards temperature control system as the research object to design a pid controller. Pid control is the most common control method up until now; the great majority feedback loop is controlled by this method or its small deformation. Pid controller (claim regulator also) and its second generation so become the most common controllers in the industry process control (so far, about 84% of the controller being used is the pure pid controller, it’ll exceed 90% if the second generation included). Pid parameter setting is most important in pid controller designing, and with the rapid development of the computer technology, it mostly recurs to some advanced software, for example, mat lab simulation software widely used now. this design is to apply that soft mainly use Relay feedback law and synthetic method on the line to study pid
华科matlab大作业
MATLAB语言、控制系统分析与设计 大作业 升降压斩波电路MATLAB仿真 专业:电气工程及其自动化 班级: 设计者: 学号: 评分: 华中科技大学电气与电子工程学院 2016 年1月
评分栏
目录 一、引言 (4) 二、电路设计与仿真 (4) 三、仿真结果及分析 (7) 四、深入讨论 (10) 五、总结 (10) 六、参考资料 (11)
升降压斩波电路MATLAB 仿真 一.引言 Buck/Boost 变换器是输出电压可低于或高于输入电压的一种单管直流变换器,其主电路与Buck 或Boost 变换器所用元器件相同,也有开关管、二极管、电感和电容构成。与Buck 和Boost 电路不同的是,电感L 在中间,不在输出端也不在输入端,且输出电压极性与输入电压相反。开关管也采用PWM 控制方式。Buck/Boost 变换器也有电感电流连续喝断续两种工作方式,在此只讨论电感电流在连续状态下的工作模式。 二.电路设计与仿真 1、电路原理 当可控开关V 处于通态时,电源E 经V 向电感L 供电使其储存能量,此时电流为i1。同时,电容C 维持输出电压基本恒定并向负载R 供电。此后,使V 关断,电感L 中储存的能量向负载L 释放,电流为i2。负载电压极性为上正下负,与电源电压极性相反。 稳态时,一个周期T 内电感L 两端电压UL 对时间积分为零,即 当V 处于通态期间,UL=E ;而当V 处于断态期间,UL=-Uo 。于是 所以,输出电压为 =?dt T L U off o on t U Et =E E t T t E t t U on on off on o α α -=-== 1