双天线GPS定向方法
双天线GPS定向方法
1. GPS测量方法
GPS测量的基本方法有两种,一是伪距测量;二是载波相位测量。载波相位测量精度要远高于伪距测量精度。
(1)伪距测量
由于卫星钟、接收机钟的误差以及大气延迟误差的影响,实际测出的距离与实际的卫星到接收机几何距离有一定差值,故一般称测出的距离为伪距。
伪距观测量按精度可分为C/A码(粗码)和P码(精码)。伪距观测量的精度一般为码元长度的1/100。C/A码码元长度为293m,故其观测精度大致为2.93m;P码码元长度为29.3m,故其观测精度大致为0.29m。
(2)载波相位测量
载波相位测量是接收机测量得到的卫星载波信号与接收机产生的参考载波信号之间的相位差。载波相位观测量的精度一般为载波长度的1/100,L1载波的波长λ1=19cm,其测距精度为0.19cm;L2载波的波长λ2=24cm,其测距精度为0.24cm。所以在测量相位精度相同的情况下,载波相位测量误差对测距精度的损失,较P码码相测量误差小两个数量级;载波相位测量的距离分辨率也较P码码相测量的距离分辨率高得多。在需要高精度测量的场合,如姿态测量系统中采用载波相位观测量进行数据处理。
由于载波不携带有测距码的任何信息,所以载波相位测量通常也称为无码测量,载波是一种周期性的正弦信号。因此,采用载波相位法是系统测量精度的保证。
系统接收L1 载波信号,有16 个L1 C/A 码独立信道。系统启动后,满足解算条件后,便可自动对整周模糊度进行初始化,初始化结束后,解算模式转到固定整周模式,最高可达20HZ 频率输出解算结果,基线2m 时定向精度0.08°,基线长度增加,可提高定向精度。若在载体上配置不共线的三个GPS 天线, 可构成两条互相独立的基线。通过这两条基线在载体坐标系和地理坐标系中的坐标位置可以在载体坐标系中建立三个互相正交的矢量,从而解算出三维姿态参数。
2. GPS姿态测量技术
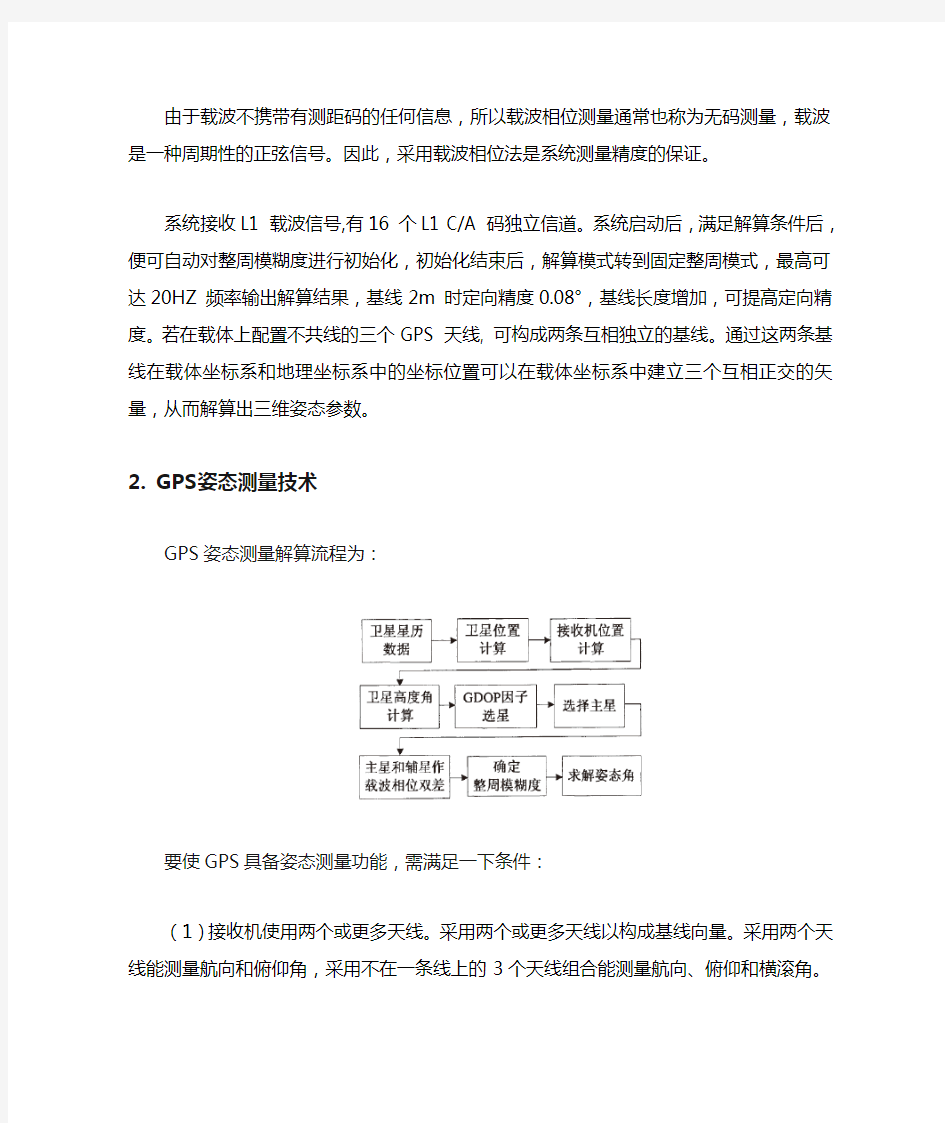
GPS姿态测量解算流程为:
要使GPS具备姿态测量功能,需满足一下条件:
(1)接收机使用两个或更多天线。采用两个或更多天线以构成基线向量。采用两个天线能测量航向和俯仰角,采用不在一条线上的3个天线组合能测量航向、俯仰和横滚角。
(2)采用载波测量数据。GPS接收机所能测量的伪距精度不足以用于测姿,必须使用载波的测量数据。
(3)解求载波周期模糊度。载波周期模糊度无法直接观测,也不能直接计算,只能通过复杂的数学模型从众多的候选值中进行挑选。目前国内外存在不少求解模糊度的数学模型,但绝大多数因为所需的计算量太大而不能用于实时计算,只适用于后加工处理,因而不能用于实时测姿。目前国内外研究这一技术的单位很多,但真正可用于高动态实时导航的算法还很少见。星宇网达采用了独创的选择计算方法,实现了使用GPS 单频接收机进行实时测量载体姿态,实现了载波相位初始整周模糊度的快速解算及周跳检测、修复,使之成为能够适用于高动态实时导航、测量姿态系统。
3.GPS/INS 组合技术
惯性导航系统( INS) 是一种完全自主的导航系统,具有不依赖外界信息、隐蔽性好、抗辐射性强、全天候等优点,是能够提供多种导航参数的重要导航设备。但它的误差随时间而积累,长时间工作后会产生大的误差,使得惯性导航系统不宜作远距离长时间导航。而全球定位系统(GPS) 具有较高的导航精度,但是由于载体的机动运动,常使接收机不易捕获和跟踪卫星的载波信号,甚至对已跟踪的信号失锁。
为克服以上这些缺点,星宇网达采用基于GPS/INS 组合技术以适当的方法将两者融合,来提高系统的整体导航精度及导航性能以及对准和再对准的能力。本系统采用捷联式INS,直接把陀螺仪和加速度计与载体连接,用大容量、高速度运算的处理器来处理载体姿态角变化对加速度计输出的影响,其优点是体积小、成本低、可靠性高。基于GPS/INS 组合技术是把INS 和GPS 有效地融合。其中,卡尔曼滤波器是INS 和GPS 融合的关键器件,起到数据融合作用。INS 和GPS 之间彼此可以优势互补,取长补短。
GPS 接收机可以向INS 提供有关它当前的积累误差的实时而准确的数值,并进行补偿,提高导航精度。INS 能够用准确的位置和速度初始值提供给GPS 接收机跟踪回路,从而减少其采集GPS 卫星信息所需要的时间。测姿过程中,INS 把速度和加速度信息提供给GPS 接收机,可以提高GPS 接收机的抗干扰能力和动态特征。如果GPS 接收机失去对卫星的自动跟踪,INS 仍然能够独立工作,并且提供的位置和速度值帮助GPS 接收机及时地采集GPS 卫星信息。系统组合原理图如图所示。
系统组合原理图
4. 定位定向产品
XW-ADU3600定位定向仪,由两个GPS接收机、两个测量型天线和以嵌入式处理器为核心的计算机组成。两个GPS作为卫星信号传感器,通过两个测量天线接收GPS系统信息,利用载波测量技术和快速求解整周模糊度技术,计算机解算出两个GPS接收机天线处位置和两天线相位中心连线与真北之间的夹角。XW-ADU3600定位定向仪克服了惯性定向产品精度随时间和温度漂移的缺陷,用途广泛,既可以独立使用,也可与其它系统联合使用。
在基线长度大于2m时,其航向定向精度为:0.1°;基线长度小于50cm时,其航向定向精度为0.5°。
全套产品价格23000元人民币左右。