机器人技术基础(课后习题答案)
0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?
答:1.机器人的运动为开式运动链而数控机床为闭式运动链;
2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;
3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为
手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?
答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
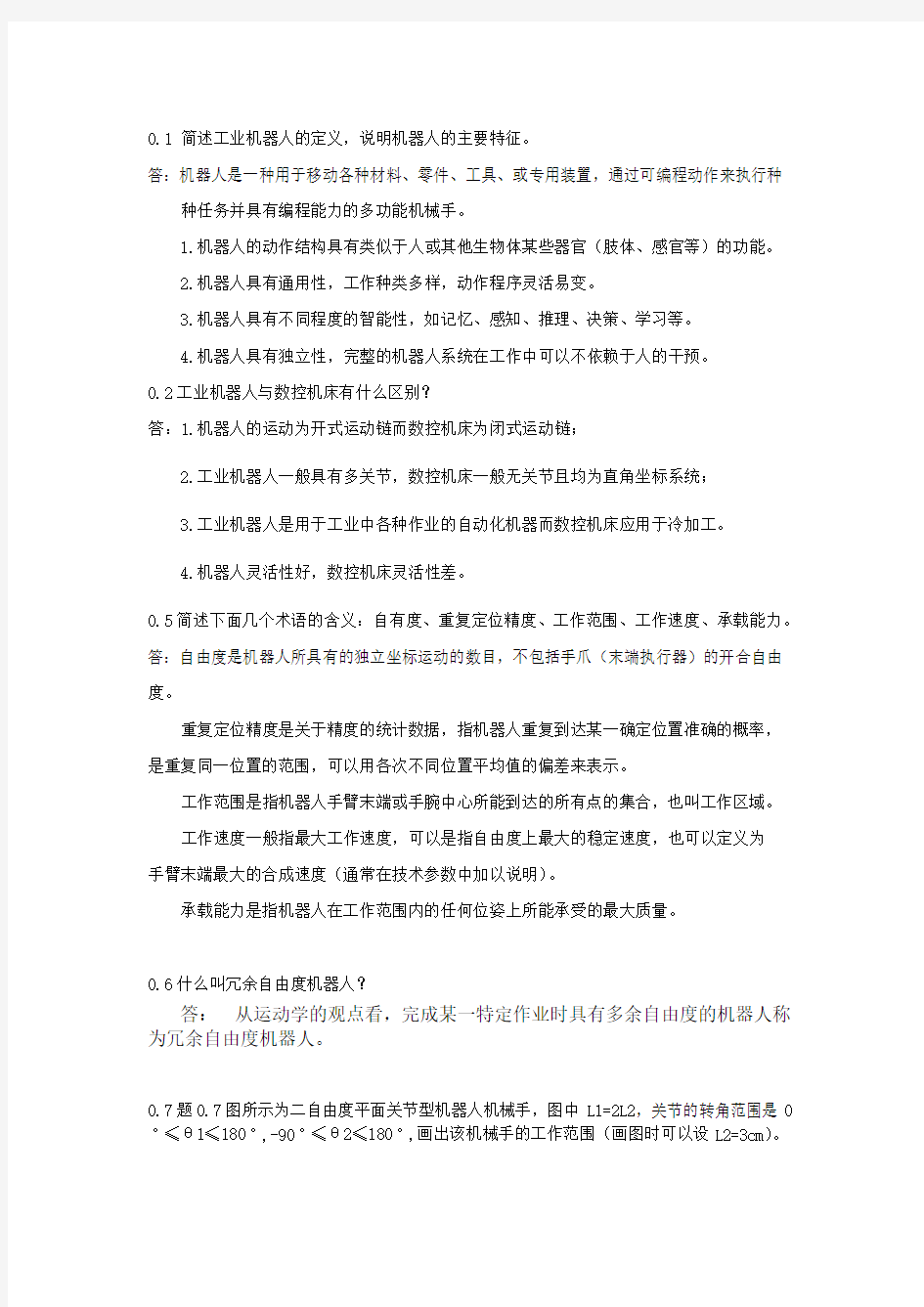
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
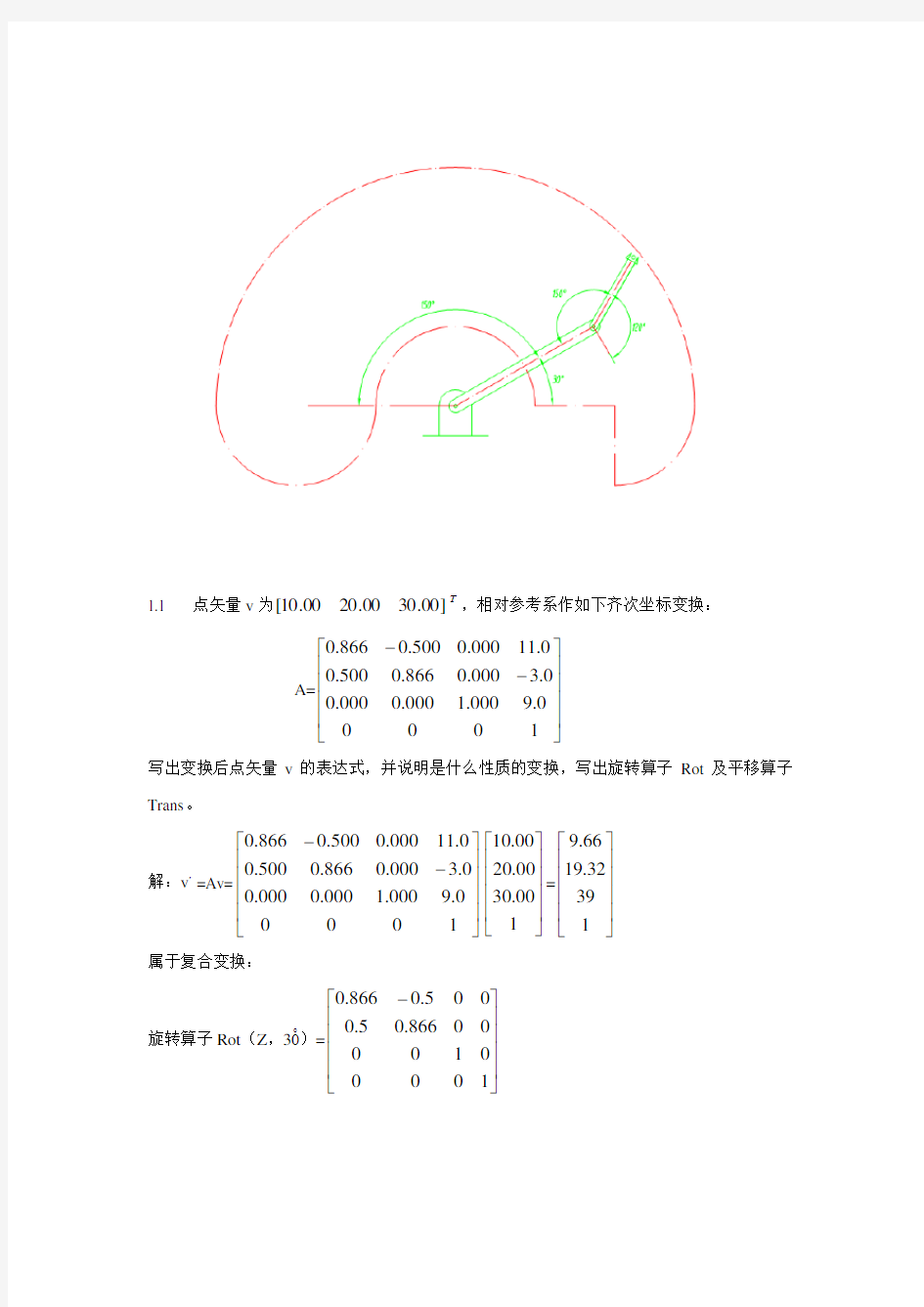
1.1 点矢量v 为]00.3000.2000
.10[T ,相对参考系作如下齐次坐标变换:
A=?
???
?????
???--1000
0.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
解:v ,=Av=?????????
???--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0???????????
?100.3000.2000.10=??
????
??????13932.1966.9 属于复合变换:
旋转算子Rot (Z , )=??
???
?
?
??
???-1000
010000866
.05.0005
.0866.0
平移算子Trans (11.0,-3.0,9.0)=?
?
???
????
???-10000.91000.3010
0.11001 1.2 有一旋转变换,先绕固定坐标系Z 0轴转 ,再绕其X 0轴转 ,最后绕其Y 0轴转 ,
试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y , )Rot (X , )Rot(Z , ) =
??
???
?
??????-???????
??
???-?????????
???-1000010000707.0707.000707.0707.010
000866
.05.0005.0866.0000
01100005.00866.000100866.005.0=
?????
?
?
??
???----1000
0433.0436.0436.005.0612.0612.00750.0047.0660.0 1.3 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转 ,然后绕旋转后
的动坐标系的X B 轴旋转 ,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
解:起始矩阵:B=O=?
?
???
????
???100001000010
0001 最后矩阵:B′=Rot(Z , )B Rot (X , )=
?????
??
?????--1000
0707.0707.000612.0612.05.000353
.0866.0 1.4 坐标系{A}及{B}在固定坐标系{O}中的矩阵表达式为
{A}=????
?????
???--10000.20866.0500.0000.00.10500.0866.0000.00.0000
.0000.0000.1 {B}=????
?
????
???----10000.3866.0433.0250.00.3500.0750.0433.00.3000.0500.0866.0 画出它们在{O}坐标系中的位置和姿势;
A=Trans (0.0,10.0,-20.0)Rot (X , )O
B=Trans(-3.0,-3.0,3.0)Rot(X , )Rot (Z , )O
1.5 写出齐次变换阵H A
B ,它表示坐标系{B}连续相对固定坐标系{A}作以下变换: (1)绕A Z 轴旋转 。 (2)绕A X 轴旋转- 。 (3)移动[]T 973。
解:
H
A B
=Trans (3,7,9)Rot (X ,- )Rot (Z , )=
??
???
??
??
???-???????
??
???-????????????1000010
00001001
0100
0001
00100000
11000910070103001=
??
???
??
??
???-???????
??
???-1000010
00001001
01000901071003001=
??
???
??
??
???--100
0900171003010
1.6 写出齐次变换矩阵H B
B ,它表示坐标系{B}连续相对自身运动坐标系{B}作以下变换: (1)移动[]T
973。
(2)绕B X 轴旋转 。. (3)绕B Z 轴转- 。.
H B B
=Trans (3,7,9)Rot (X , )Rot (Z , )=
?
?
???
??
??
???-???????
??
???-????????????1000
0100
0001001010000010
010000
01
1000910070103001=
?
?
???
?
?
??
???--=???????
??
???-????????????-1000
9001
710030
1
10000100
000100101000
9010710030
1
1.7 对于1.7图(a )所示的两个楔形物体,试用两个变换序列分别表示两个楔形物体的变换过程,使最后的状态如题1.7图(b)所示。
(a) (b)
解:A=??
?????
??
???---1111112200000044
00111111 B=?
?
???
?
?
??
???---1111112200005599551111
11 A′=Trans(2,0,0)Rot (Z , )Rot (X , )Trans (0,-4,0)
A=
?
?
???
?
??????-???????
??
???-???????
??
???-????????????10000100
401000
01
1000001
00100000
11000010
00001001
01000010000102001?
?
????
?
??
???---111111220000004400111111=
???????
??
???--1000401000012100?
?
???
??
??
???---111111220000004400111111=
?
?
???
??
??
???---1111
11440044111111002222 B′=Rot
(
X
, )
Rot
(Y , )Trans (0,-5,0)B=
?
?
???
?
?
??
???-???????
??
???-????????????-10000100
501000
01
10000001
0010010010000010010000
01?
?
?????
??
???---111111220000559955111111=
?
?
???
?
?
??
???-????????????1000
0100
501000
01
1000
001000010100?
?
???
??
??
???---1111
11220000559955111111=
?
?
?
??
???????-1000
501000
010100???????
??
???---111111220000559955111111=?
?
???
??
??
???---1111110044
001111112200
00 1.8 如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为θ1;关节2为移动关节, 关节变量为d 2。试:
(1)建立关节坐标系,并写出该机械手的运动方程式。 (2)按下列关节变量参数求出手部中心的位置值。
θ1 0 30 60 90 d 2/m
0.50
0.80
1.00
0.70
解:建立如图所示的坐标系 参数和关节变量
连杆 θ α а d 1
θ1 0 0 0 2
d 2
?
?
??????????-==1000
00000000),(11
1111θθ
θθθC S S C Z Rot A ?
?
???
?
??????==100001000010001
)0,0,(222d d Trans A 机械手的运动方程式:
当θ1=0,d 2=0.5时:
手部中心位置值?
?
???
????
??
?=1000
00000010
5.0001
B 当θ1=30,d 2=0.8时
手部中心位置值 ?
????
?
?
??
???-=1000
00004.00866.05.0433.005.0866.0B
当θ1=60,d 2=1.0时
=?=2
12A A T ?
?
???
?
?
?????-1000
0100sin 0cos sin cos 0sin cos 12111211θθθθθθd d
手部中心位置值?
?
???
?
?
??
???-=1000
0000866.005
.0866.05.00
866.05.0B 当θ1=90,d 2=0.7时
手部中心位置值??
???
??
??
???-=100
000007.000
1001
0B 1.11 题1.11图所示为一个二自由度的机械手,两连杆长度均为1m ,试建立各杆件坐标系,
求出1A ,2A 的变换矩阵。
解:建立如图所示的坐标系 参数和关节变量
连杆 θ α а d 1
1θ
1 0
0 2
2θ-
1
A 1=Rot(Z , θ1) Trans(1,0,0) Rot(X , 0o)= A 2= Rot(Z , -θ2)Trans(l, 0, 0)Rot(X , 90o) 1.13 有一台如题1.13图所示的三自由度机械手的机构,各关节转角正向均由箭头所示方向指定,请标出各连杆的D-H 坐标系,然后求各变换矩阵1A ,2A ,3A 。 解:D-H 坐标系的建立
?
?
???????
???-100001000cos sin 0sin cos 111
111θθθ
θθθs c ?????
?
???
???-=10
0000000022
22θθθθc c s s
按D-H 方法建立各连杆坐标系 参数和关节变量
连杆 θ
α
a d
1 1 0
1L +2L
2 2 0 3L
0 3
3
4L
1A = 2A =3A =
3.1 何谓轨迹规划?简述轨迹规划的方法并说明其特点。 答:机器人的轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点位移,速度和加速度。 轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。
(1)示教—再现运动。这种运动由人手把手示教机器人,定时记录各关节变量,得到沿路径运动时各关节的位移时间函数q(t);再现时,按内存中记录的各点的值产生序列动作。 (2)关节空间运动。这种运动直接在关节空间里进行。由于动力学参数及其极限值直接在关节空间里描述,所以用这种方式求最短时间运动很方便。
(3)空间直线运动。这是一种直角空间里的运动,它便于描述空间操作,计算量小,适宜简单的作业。
(4)空间曲线运动。这是一种在描述空间中用明确的函数表达的运动。
3.2 设一机器人具有6个转动关节,其关节运动均按三次多项式规划,要求经过两个中间路径点后停在一个目标位置。试问欲描述该机器人关节的运动,共需要多少个独立的三次多项式?要确定这些三次多项式,需要多少个系数? 答:共需要3个独立的三次多项式; 需要72个系数。
3.3 单连杆机器人的转动关节,从q = –5°静止开始运动,要想在4 s 内使该关节平滑地运动到q =+80°的位置停止。试按下述要求确定运动轨迹: (1)关节运动依三次多项式插值方式规划。
(2)关节运动按抛物线过渡的线性插值方式规划。
θθθ??
???
?
???
???+-10
0100cos 0sin 0sin 0cos 2111
11L L θθ
θθ?????????
???-10000100sin 0cos sin cos 0sin cos
23222322θθθθθθL L ?
?
???
??
?????-1000
0100sin 0cos
sin cos 0sin cos
343
33433θθθθθθL L
解:(1)采用三次多项式插值函数规划其运动。已知,4,80,50s t f f ==-=
θθ代入可得系数为66.2,94.15,0,53210-===-=a a a a 运动轨迹:
()()()t
t t t t t t t 96.1588.3198.788.3166.294.155232-=-=-+-=???
θθθ
(2)运动按抛物线过渡的线性插值方式规划:
,4,80,50s t f f ==-= θθ
根据题意,定出加速度的取值范围:
225.2116
854s =?≥?
?θ
如果选2
42s
=?
?θ,算出过渡时间1a t ,
1a t =[42
285
4244422422???-?-]=0.594s
计算过渡域终了时的关节位置1a θ和关节速度?
1θ,得
1a θ= 4.2)594.0422
1
(52=??+-
s s a s t 95.24)594.042(111=?==?
??θθ
4.1 机器人本体主要包括哪几部分?以关节型机器人为例说明机器人本体的基本结构和主要特点。
答:机器人本体:(1)传动部件 (2)机身及行走机构 (3)机身及行走机构(4)腕部 (5)手部
基本结构:机座结构、腰部关节转动装置、大臂结构、大臂关节转动装置、小臂结 构、小臂关节转动装置、手腕结构、手腕关节转动装置、末端执行器。
主要特点:
(1) 一般可以简化成各连杆首尾相接、末端无约束的开式连杆系,连杆系末端自由且无支承,这决定了机器人的结构刚度不高,并随连杆系在空间位姿的变化而变化。
(2) 开式连杆系中的每根连杆都具有独立的驱动器,属于主动连杆系,连杆的运动各自独立,不同连杆的运动之间没有依从关系,运动灵活。
(3) 连杆驱动扭矩的瞬态过程在时域中的变化非常复杂,且和执行器反馈信号有关。连杆的驱动属于伺服控制型,因而对机械传动系统的刚度、间隙和运动精度都有较高的要求。
(4) 连杆系的受力状态、刚度条件和动态性能都是随位姿的变化而变化 的,因此,极容易发生振动或出现其他不稳定现象。
4.2 如何选择机器人本体的材料,常用的机器人本体材料有哪些?
答:需满足五点基本要求:1.强度大 2.弹性模量大 3.重量轻 4.阻尼小 5.材料经济性 常用材料:1.碳素结构钢和合金钢 2.铝、铝合金及其他轻合金材料 3.纤维增强合金 4.陶瓷 5.纤维增强复合材料 6.粘弹性大阻尼材料
4.3 何谓材料的E /ρ?为提高构件刚度选用材料E /ρ大些还是小些好,为什么? 答:即材料的弹性模量与密度的比值;
大些好,弹性模量E 越大,变形量越小,刚度走越大;且密度ρ越小,构件质量越小,则构件的惯性力越小,刚度越大。所以E /ρ大些好。
4.4 机身设计应注意哪些问题? 答:(1) 刚度和强度大,稳定性好。 (2) 运动灵活,导套不宜过短,避免卡死。
(3) 驱动方式适宜。 (4) 结构布置合理。
4.5 何谓升降立柱下降不卡死条件?立柱导套为什么要有一定的长度?
解:(1)当升降立柱的偏重力矩过大时,如果依靠自重下降,立柱可能卡死在导套内;当
2h fL >时立柱依靠自重下降就不会引起卡死现象。
(2)要使升降立柱在导套内下降自由,臂部总重量W 必须大于导套与立柱之间的摩擦力
及
,因此升降立柱依靠自重下降而不引起卡死的条件为
即
式中:h 为导套的长度(m);f 为导套与立柱之间的摩擦系数,f =0.015~0.1,一般取较大值;
L 为偏重力臂(m)。
4.9 机器人手爪有哪些种类,各有什么特点? 答:1.机械手爪:依靠传动机构来抓持工件; 2.磁力吸盘:通过磁场吸力抓持铁磁类工件,要求工件表面清洁、平整、干燥,以保证可靠地吸附,不适宜高温条件; 3.真空式吸盘:利用真空原理来抓持工件,要求工件表面平整光滑、干燥清洁,同时气密性要好。
4.11 何谓自适应吸盘及异形吸盘?
答:自适应吸盘:真空吸盘的一种新设计,增加了一个球关节,吸盘能倾斜自如,适应工件表面倾角的变化。 异形吸盘:真空吸盘的一种新设计,可以用于吸附鸡蛋、锥颈瓶等非平整工件。
4.15 传动件消隙常有哪几种方法,各有什么特点?
答:1) 消隙齿轮:相啮合的两齿轮中有一为两个薄齿轮的组合件,能过两个薄齿轮的组合来消隙;
2) 柔性齿轮消隙:对具有弹性的柔性齿轮加一预载力来保证无侧隙啮合;
m1
F m2
F m1m2N122L
W F F F f Wf
h >+==2h fL >
3) 对称传动消隙:一个传动系统设置两个对称的分支传动,并且其中有一个具有回弹能力。
4) 偏心机构消隙:当有齿轮磨损等原因造成传动间隙增加时,利用中心距调整机构调
整中心距。
5) 齿廓弹性覆层消隙:齿廓表面覆有薄薄一层弹性很好的橡胶层或层压材料,通过对
相啮合的一对齿轮加以预载,来完全消除啮合侧隙。
4.16 简述机器人行走机构结构的基本形式和特点。
答:基本形式:固定轨迹式和无固定轨迹式(步行式、轮式和履带式)
固定轨迹式:机身底座安装在一个可移动的拖板座上,靠丝杠螺母驱动,整个机器人沿丝杠纵向移动。
无固定轨迹式:在行走过程中,步行式为间断接触,轮式和履带式与地面为连续
接触;前者为类人(或动物)的腿脚式,后两者的形态为运行车式。运行车式行走机构用得比较多,多用于野外作业,比较成熟。步行式行走机构正在发展和完善中。
6.1 试述机器人示教编程的过程及特点。
答:过程:操作者根据机器人作业的需要把机器人末端执行器送到目标位置,且处于相应的姿态,然后把这一位置、姿态所对应的关节角度信息记录到存储器保存。对机器
人作业空间的各点重复以上操作,就把整个作业过程记录下来,再通过适当的软
件系统,自动生成整个作业过程的程序代码。
优点:操作简单,易于掌握,操作者不需要具备专门知识,不需复杂的装置和设备,轨迹修改方便,再现过程快。
缺点:(1) 示教相对于再现所需的时间较长;
(2) 很难示教复杂的运动轨迹及准确度要求高的直线;
(3) 示教轨迹的重复性差;
(4) 无法接受传感器信息;
(5) 难以与其他操作或其他机器人操作同步。
6.2 试举例说明MOTOMAN UP6机器人焊接作业时的示教编程过程。
答:S1.通过示教盒使机器人处于示教状态;
S2.创建新的示教程序,用轴操作键将机器人依次移动到准备位置、可作业姿态、作业开始位置、作业结束位置等位置并输入相应的插补方式及相应的操作命令;
S3.示教轨迹的确认。
6.3 按机器人作业水平的程度分,机器人编程语言有哪几种?各有什么特点?
答:1.动作级编程语言:优点:比较简单,编程容易。
缺点:功能有限,无法进行繁复的数学运算,不接受浮点数和字符串,子程序不含有自变量;不能接受复杂的传感器信息,只能接受传感器开关信息;与计算机的通信能力很差。
2.对象级编程语言:(1) 具有动作级编程语言的全部动作功能;
(2) 有较强的感知能力;
(3) 具有良好的开放性;
(4) 数字计算和数据处理能力强;
3.任务级编程语言:结构十分复杂,需要人工智能的理论基础和大型知识库、数据库的支持。
6.7 机器人离线编程的特点及功能是什么?
答:特点:在不接触实际机器人及机器人作业环境的情况下,通过图形技术,在计算机上提供一个和机器人进行交互作用的虚拟现实环境。
功能:利用机器人图形学的成果,建立起机器人及其作业环境的模型,再利用一些规划算法,通过对图形的操作和控制,在离线的情况下进行轨迹规划。
6.8 MOTOMAN UP6型机器人仿真软件有哪些主要功能?
答:编辑、仿真、检测和示教。
7.1 机器人的工业应用可分为哪四个方面?
答:材料加工、零件制造、产品检验和装配。
7.3 完整的焊接机器人系统一般由哪几个部分组成?
答:机器人操作机、变位机、控制器、焊接系统、焊接传感器、中央控制计算机和相应的安全设备等。
7.4 简述变位机在焊接生产线或焊接柔性加工单元中的作用。
答:将被焊工件旋转(平移)到最佳的焊接位置。
7.5 简述焊接机器人按用途、结构、受控方式及驱动方法等进行分类的情况。
答:按用途:弧焊和点焊;按结构:关节型和非关节型
按受控方式:点位控制和连续轨迹控制
7.6 弧焊机器人工作站按功能和复杂程度的不同可分为哪几种。
答:①.无变位机的普通弧焊机器人工作站;②.不同变位机与弧焊机器人组合的工作站;③.
弧焊机器人与周边设备协调运动的工作站。
7.7 自动搬运工作站由哪些部分组成?
答:组成:搬运机器人和周边设备(工件自动识别装置、自动启动及自动传输装置等)。
7.12 机器人装配作业的主要操作过程是什么?
答:垂直向上抓起零部件,水平移动它,然后垂直放下插入。
控制工程基础第三版机械工业出版社课后答案
控制工程基础习题解答 第一章 1-5.图1-10为张力控制系统。当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。画出该控制系统的框图。 图1-10 题1-5图 由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。 当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。 框图如图所示。 角位移 题1-5 框图 1-8.图1-13为自动防空火力随动控制系统示意图及原理图。试说明该控制系统的作用情况。
该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统 获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。 跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。 瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。 控制工程基础习题解答 第二章 2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。 (3). ()t e t f t 10cos 5.0-= 解:()[][ ] ()100 5.05 .010cos 2 5.0+++= =-s s t e L t f L t (5). ()?? ? ? ?+ =35sin πt t f 图1-13 题1-8图 敏感元件
数据库系统基础教程(第二版)课后习题答案
Database Systems: The Complete Book Solutions for Chapter 2 Solutions for Section 2.1 Exercise 2.1.1 The E/R Diagram. Exercise 2.1.8(a) The E/R Diagram Kobvxybz Solutions for Section 2.2 Exercise 2.2.1 The Addresses entity set is nothing but a single address, so we would prefer to make address an attribute of Customers. Were the bank to record several addresses for a customer, then it might make sense to have an Addresses entity set and make Lives-at a many-many relationship. The Acct-Sets entity set is useless. Each customer has a unique account set containing his or her accounts. However, relating customers directly to their accounts in a many-many relationship conveys the same information and eliminates the account-set concept altogether. Solutions for Section 2.3 Exercise 2.3.1(a) Keys ssNo and number are appropriate for Customers and Accounts, respectively. Also, we think it does not make sense for an account to be related to zero customers, so we should round the edge connecting Owns to Customers. It does not seem inappropriate to have a customer with 0 accounts;
基础工程(清华大学出版社)第二章课后习题答案
(1)地区的标准冻结深度为 0 =1.8m 2)按式 2-30求设计冻结深度,即 d = 0 zs zw ze 第二层土: d>0.5mm 占 40%<50%, d>0.25mm 占 55%>50%,为中砂, zs =1.30 查表 2-12 求 zw 第一层土: 按表 2-10查粉土, 19%< =20%<22%,底面距地下水位 0.8m<1.5m ,冻胀 等级为Ⅲ级 冻胀类别为冻胀 zw =0.90 第二层土:按表 2-10 查中砂,地下水位离标准冻结面距离为 0.2m<0.5m 冻胀等级为 Ⅳ级 冻胀类别为强冻胀 zw =0.85 查表 2-13 求 ze 城市人口为 30 万,按城市的近郊取值 ze =0.95(注意表格下面的注释) 按第一层土计算: d1 =1.8*1.2*0.90*0.95=1.85m 按第二层土计算: d2 =1.8*1.3*0.85*0.95=1.89m 表明:冻结深度进入了第二层土内,故残留冻土层主要存在于第二层土。可近似取冻深 最大的土层,即第二层土的冻深 1.89m 来作为场地冻深。 如果考虑两层土对冻深的影响,可通过折算来计算实际的场地冻深。 折算冻结深度: Z d ' =1.2 +(1.85 - 1.2)* 1.89 =1.864m 1.85 (3)求基础最小埋深 按照正方形单独基础,基底平均压力为 120kp a ,强冻胀、采暖条件,查表 2-14 得允许 残留冻土层厚度 h max =0.675m 由式 2-31求得基础的最小埋置深度 d min = d - h max =1.89-0.675=1.215m 或者:最小埋置深度 d min = 'd - h max =1.864-0.675=1.189m 综合可取 d min =1.2m 查表 2-11 求 zs 第一层土: I p = L - P =8<10 且 d>0.075mm 占土重 10%<50% ,为粉土, zs =1.20
工程数学基础教程课后习题答案
工程数学基础习题解答
习题一 A
一、判断题 1.√;, 2.√; 3.×; 4.×; 5.×; 6.×; 7.×; 8.√; 9.√;10.×. 二、填空题 1.;C C A B 2.111(){1,2,3,4},(){,,},(){,,},(){1,4},(){2,3};f f a b e f A a b e f B f b --=====D R 3.满; 4.2sup = E ,3inf -=E ; 5.0; 6.0; 7. n ; 8.Y . B 1.证 ()y f A B ?∈?,x A B ?∈?使得)(x f y =.由x A B ∈?,得x A ∈,且x B ∈故()()y f x f A =∈且()y f B ∈,即()()y f A f B ∈?,因此()()()f A B f A f B ???. 当f 是单射时,只需证明()()()f A f B f A B ???即可: ()()(),y f A f B f ?∈??R f 由是单射知,(). (),(),1X y f x y f A y f B x ?=∈∈∈使得且 ,,()(),x A x B x A B y f x f A B ∴∈∈∈?=∈?且即从而故()()()f A f B f A B ???. 是可能的,例如, 2:,[2, 0],[1, 3],[1, 0].f x x A B A B =-=-?=-取则()([1,0])[0, 1], f A B f ?=-=于是而 [][]()()0, 4[0, 9]0, 4.f A f B ?=?=从而有 . 2. 证(1)n ?∈,有)2 ,2(12 ,12][-?-+-n n ,故 ∞ =-?-+-1)2 ,2(12 12][n n ,n . 另一方面,)2 ,2(-∈?x ,k ?∈ ,使][12 ,12k k x -+-∈,故 ∞ =-+-∈1 ][12 12n n ,n x ,于是 ? -)2 ,2( ∞ =-+-1 ][12 12n n ,n . 因此, ∞ =-+-= -1 ][12 ,12)2 ,2(n n n . (2)n ?∈,有)12 ,12(]2 ,2[n n +--?-,故 ∞ =+--?-1)12 ,12(]2 ,2[n n n . 另一方面,对任意]2 ,2[-?x ,即2>x ,k ?∈ ,使得212>+>k x ,即 )12 ,12(k k x +--?,从而 ∞ =+--?1)12 ,12(n n n x ,故 ∞ =-?+--1 ]2,2[)12 ,12(n n n .
土力学与基础工程课后思考题答案
土力学与基础工程课后思考题答案 第二章 2.1土由哪几部分组成?土中水分为哪几类?其特征如何?对土的工程性质影响如何? 土体一般由固相、液相和气相三部分组成(即土的三相)。 土中水按存在形态分为:液态水、固态水和气态水(液态水分为自由水和结合水,结合水分为强结合水和弱结合水,自由水又分为重力水和毛细水)。 特征:固态水是指存在于颗粒矿物的晶体格架内部或是参与矿物构造的水,液态水是人们日常生活中不可缺少的物质,气态水是土中气的一部分。 影响:土中水并非处于静止状态,而是运动着的。工程实践中的流沙、管涌、冻胀、渗透固结、渗流时的边坡稳定问题都与土中水的运用有关。 2.2土的不均匀系数Cu及曲率系数Cc的定义是什么?如何从土的颗粒级配曲线形态上,Cu和Cc数值 上评价土的工程性质。 不均匀系数Cu反映了大小不同粒组的分布情况。 曲率系数Cc描述了级配曲线分布的整体形态,表示是否有某粒组缺失的情况。 评价:(1)对于级配连续的土:Cu>5,级配良好;Cu<5,级配不良。 (2)对于级配不连续的土:同时满足Cu>5和Cc=1~3,级配良好,反之则级配不良。 2.3说明土的天然重度、饱和重度、浮重度和干重度的物理概念和相互联系,比较同一种土各重度数值 的大小。 天然重度、饱和重度、浮重度和干重度分别表示单位体积的土分别在天然、饱和、湿润、干燥状态下的重量,它们反映了土在不同状态下质量的差异。 饱和重度>天然重度>干重度>浮重度 2.4土的三相比例指标有哪些?哪些可以直接测定?哪些通过换算求得?为换算方便,什么情况下令 V=1,什么情况下令Vs=1? 三相比例指标有:天然密度、含水量、相对密度、干密度、饱和密度、有效密度、孔隙比、孔隙率、饱和度。 直测指标:密度、含水量、相对密度。换算指标:孔隙比、孔隙率、饱和度。 当已知相对密度ds时令Vs=1,当已知天然密度时令V=1,如若两者都已知,设V=1或Vs=1都行2.5反映无黏性土密实度状态的指标有哪些?采用相对密实度判断砂土的密实度有何优点?而工程上为 何应用得并不广泛? 指标:孔隙比、最大孔隙比、最小孔隙比。 优点:判断密实度最简便的方法是用孔隙比e来描述,但e未能考虑级配的因素,故引入密实度。 应用不广泛的原因:天然状态砂土的孔隙比e值难测定,此外按规程方法室内测定孔隙比最大值和孔隙比最小值时,人为误差也较大。 2.6下列物理指标中,哪几项对黏性土有意义?哪几项对无黏性土有意义? 塑性指数、液性指数对黏性土有意义。粒径级配、相对密实度对无黏土有意义。 2.7简述渗透定理的意义,渗透系数K如何测定?动水如何计算?何谓流砂现象?这种现象对工程有何 影响? 渗透定理即达西定律V=ki,其反映土中水渗流快慢。 室内测定渗透系数有常水头法和变水头法,也可在现场进行抽水实验测定。 流砂现象:当动水为GD数值等于或大于土的浮重度时,土体发生浮起而随水流动。 影响:基础因流砂破坏,土粒随水流走,支撑滑落,支护结构移位,地面不均匀沉降,引起房屋产生裂缝及地下管线破坏,严重时将导致工程事故。 2.8土发生冻胀的原因是什么?发生冻胀的条件是什么? 原因:在气温降低以及浓度变化产生渗透压两种作用下,下卧未冻结区的水被吸引到冻结区参与冻结,使冰晶体不断扩大,在土层中形成冰夹层,土体随之发生隆起。 发生冻胀条件:(1)土的因素:冻胀通常发生在细粒土中 (2)水的因素:土层发生冻胀是由水分的迁移和积聚所致 (3)温度因素:当气温骤降且冷却强度很大时,土的冻结面迅速向下推移,冻结速 度很快。
机器人技术基础知识总结
坐标系ouvw 除绕坐标系oxyz的坐标轴旋转外, 还可以绕它本身的坐标轴旋转。如果坐标系ouvw 绕坐标系oxyz 的坐标轴旋转, 则可对旋转矩阵左乘相应的基本旋转 矩阵; 如果ouvw 绕本身的坐标轴旋转,则可对旋转矩阵右乘相应 的基本旋转矩阵。 2目前机器人的运动学和动力学研究主要向下面所述的几个方 面深人发展: 1.机器人的轨迹规划。 2.切实可行的设计和评价机器人的动力学方法。 3.适应机器人的实时计算,减少计算时间,提高 计算效率。 4.解决控制系统的反馈、稳定等方面的问题。 5.随着机器人以高速、高精度发展,考虑构件弹性及振动影响的动力学研究。 6.改进和完善动力学建模方法。 3国内主要采用open GL软件实现机器人仿真 4运动学和动力学模型简化条件 (1) 假设机器人各杆件是刚性的;忽略各杆件的变形,都当作 刚性构件来处理; (2) 各构件的摩擦忽略不计; 目前,已经能够对一般结构的六自由度串联机器人进行逆运动 学求解,但是要获得显式解,只有满足下列两个充分条件之一: a.3 个相邻关节轴交于一点。 b.3 个相邻关节轴平行。 5假定坐标系oxyz 是三维空间中的固定坐标系(在机器人运动学中为总体坐标系),坐标系ouvw 固定在机器人杆件上并随杆件一起运动(此坐标系为附体坐标系) 6齐次坐标是用n+1 维坐标来描述n 维空间的位置 7在机器人杆件关节上建立坐标系有两种方法:一是把杆件坐标 系建立在每个杆件的下关节处;二是把杆件坐标系建立在每个杆件 的上关节处。 8 i 杆件的坐标系设置在i+1 号关节上,并固定i 关节, 坐标系{i}与杆件i 无相对运动 这种传递矩阵是把i 杆件的坐标系设置在i 号关节上,并固定i关节, 坐标系{i}与杆件i 无相对运动
《控制工程基础》王积伟_第二版_课后习题解答(完整)
第一章 3 解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△u=u1-u2驱动伺服电动机,进而通过传动装置控制 大门的开启。当大门在打开位置,u2=u 上:如合上开门开关,u1=u 上 ,△u=0, 大门不动作;如合上关门开关,u1=u 下 ,△u<0,大门逐渐关闭,直至完全关闭, 使△u=0。当大门在关闭位置,u2=u 下:如合上开门开关,u1=u 上 ,△u>0,大 门执行开门指令,直至完全打开,使△u=0;如合上关门开关,u1=u 下 ,△u=0,大门不动作。 2)控制系统方框图 4 解:1)控制系统方框图
2)工作原理: a)水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球顶杆的长度给定,杠杆平衡时,进水阀位于某一开度,水位保持在给定值。当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构是进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。此为连续控制系统。 b) 水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球拉杆的长度给定。杠杆平衡时,进水阀位于某一开度,水位保持在给定值。当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后,在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。随后水位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。此系统是离散控制系统。 2-1解: (c )确定输入输出变量(u1,u2) 22111R i R i u += 222R i u = ?-= -dt i i C u u )(1 1221 得到:11 21221222 )1(u R R dt du CR u R R dt du CR +=++ 一阶微分方程 (e )确定输入输出变量(u1,u2) ?++=i d t C iR iR u 1 211 R u u i 2 1-=
MATLAB基础教程薛山第二版课后习题答案讲解
《及应用》实验指导书 《及应用》实验指导书 班级: T1243-7 姓名:柏元强 学号: 20120430724 总评成绩: 汽车工程学院 电测与汽车数字应用中心
目录 实验04051001 语言基础..................... 错误!未指定书签。实验04051002 科学计算及绘图............. 1错误!未指定书签。实验04051003 综合实例编程.. (31)
实验04051001 语言基础 1实验目的 1) 熟悉的运行环境 2) 掌握的矩阵和数组的运算 3) 掌握符号表达式的创建 4) 熟悉符号方程的求解 2实验内容 第二章 1. 创建的变量,并进行计算。 (1) 87,190,计算 、、a*b 。 (87); (190); *b (2) 创建 8 类型的变量,数值与(1)中相同,进行相同的计算。 8(87); 8(190); *b 2.计算: (1) 操作成绩 报告成绩
(2) e3 (3) (60) (3) (3*4) 3.设,,计算: (1) (2) (3) 23; (4*u*v)(v) (((u))^2)/(v^2) ((3*v))/(u*v) 4.计算如下表达式: (1) (2) (3-5*i)*(4+2*i) (2-8*i) 5.判断下面语句的运算结果。 (1) 4 < 20
(2) 4 <= 20 (3) 4 20 (4) 4 20 (5) 'b'<'B' 4 < 20 , 4 <= 20,4 20,4 20,'b'<'B' 6.设,,,,判断下面表达式的值。 (1) (2) (3) (4) (5) (6) 395837; a><>>> 7.编写脚本,计算上面第2题中的表达式。 ('(60)='); ((60)) ('(3)='); ((3)) ('(3*4)='); ((3*4)) 8.编写脚本,输出上面第6题中的表达式的值。395837;
基础工程-第3章课后习题答案
1.试述桩的分类。 (一)按承台位置分类。可分为高桩承台基础和低桩承台基础,简称高桩承台和低桩承台。 (二)按施工方法分类。可分为沉桩(预制桩)、灌注桩、管桩基础、钻埋空心桩。 (三)按设置效应分类。可分为挤土桩、部分挤土桩和非挤土桩。 (四)按桩土相互作用特点分类。可分为竖向受荷桩(摩擦桩、端承桩或柱桩)、横向受荷桩(主动桩、被动桩、竖直桩和斜桩)、桩墩(端承桩墩、摩擦 桩墩)。 (五)按桩身材料分类。可分为木桩(包括竹桩)、混凝土桩(含钢筋和混凝土桩和预应力钢筋混凝土桩)、钢桩和组合桩。 2.桩基设计原则是什么? 桩基设计·应力求做到安全适用、经济合理、主要包括收集资料和设计两部分。 1.收集资料 (1)进行调查研究,了解结构的平面布置、上部荷载大小及使用要求等; (2)工程地质勘探资料的收集和阅读,了解勘探孔的间距、钻孔深度以及 土层性质、桩基确定持力层; (3)掌握施工条件和施工方法,如材料、设备及施工人员等; 2.设计步骤 (1)确定桩的类型和外形尺寸,确定承台埋深; (2)确定单桩竖向承载力特征值和水平承载力特征值; (3)初步拟定桩的数量和平面布置; ( 4 )确定单桩上的竖向和水平承载力,确定群桩承载力; ( 5 )必要时验算地基沉降; ( 6 )承台结构设计; ( 7 )绘制桩和承台的结构及施工图; 3.设计要求
《建筑地基基础设计规范》(GB 50007 —2011)第8.5.2条指出,桩基设计应符合下列规范: (1)所有桩基均应进行承载力和桩身强度计算。对预制桩,尚应进行运输、吊装和锤击等中的强度和抗裂验算。 (2)桩基沉降量验算应符合规范第8.5.15条规定。 (3)桩基的抗震承载力验算应符合现行国家标准《建筑抗震设计规范》 (GB 50011—2010)的相关规定。 (4)桩基宜选用中、低压缩性土层作为桩端持力层。 (5)同一结构单元内的桩基,不宜选用压缩性差异较大的土层作为桩端持力层,不宜采用部分摩擦桩和部分端承桩。 (6)由于欠固结软土、湿陷性土和场地填土的固结,场地大面积堆载、降低 地下水位等原因,引起桩周土的沉降大于柱的沉降时,应考虑桩侧负摩阻力对 桩基承载力和沉降的影响。 (7)对位于坡地、岸边的桩基,应进行桩基的整体稳定性验算。桩基应与边 坡工程统一规划,同步设计。 (8)岩溶地区的桩基,当岩溶上覆土层的稳定性有保证,且桩端持力层承载 力及厚度满足要求,可利用覆土层作为桩端持力层。当必须采用嵌岩桩时,应 对岩溶进行施工勘探。 (9)应考虑桩基施工中挤土效应对桩基及周边环境的影响;在深厚饱和软土 中不宜采用大片密集有挤土效应的桩基。 (10)应考虑深基坑开挖中,坑底土回弹隆起对桩受力及桩承载力的影响。 (11)桩基设计时,应结合地区经验考虑桩、土、承台的共同作用。 (12)在承台及地下室周围的回填土中,应满足填土密实度要求。 3.什么是单桩?说明桩侧极限摩阻力的影响因素是什么。 单桩: 即采用一根桩(通常为大直径桩)以承受和传递上部结构(通长为柱)荷载的独立基础。 极限摩阻力的影响因素:(1)桩周土的性质; (2)桩、土相对位移; (3)桩的直径的影响; (4)桩-土界面条件的影响;
机器人技术基础(课后习题答案)
简述工业机器人的定义,说明机器人的主要特征。 答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。 1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。 2.机器人具有通用性,工作种类多样,动作程序灵活易变。 3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。 4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。 工业机器人与数控机床有什么区别 答:1.机器人的运动为开式运动链而数控机床为闭式运动链; 2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统; 3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。 4.机器人灵活性好,数控机床灵活性差。 简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。 重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。 工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。 工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为 手臂末端最大的合成速度(通常在技术参数中加以说明)。 承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。 什么叫冗余自由度机器人 答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。 题图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
ml基础教程课后习题解答
X M L基础教程课后习 题解答 内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)
XML基础教程课后习题 习题一 1.答:HTML是用来编写Web页的语言、不允许用户自定义标记,HTML体现数据的显示格式。XML描述数据的组织结构、可自定义标记,其标记名称是对标记所包含的数据内容含义的抽象,而不是数据的显示格式。 2.答:使用UTF-8保存 5.答:(1)不可以,(2)可以,(3)不可以 6.答:: time { display:block;font-size:18pt;font-weight:bold } hour { display:line;font-size:16pt;font-style:italic } mimute { display:line;font-size:9pt;font-weight:bold } 习题二1.答:(1)使用ANSI编码。(2)可以。(3)不合理。 2.答:不相同。 3.答:(1)和(2)。 4.答:。
5.答:“root”标记包含的文本内容都是空白字符。“a1”标记包含的文本内容:
土木工程施工课后习题答案(供参考)
第一章 土方工程 1.某工程基础(地下室)外围尺寸40m ×25m ,埋深,为满足施工要求,基坑底面积尺寸在基础外每侧留宽的工作面;基坑长短边均按1:放坡(已知K S =,K S ′=)。试计算: (1)基坑开挖土方量; (2)现场留回填土用的土方量; (3)多余土用容量为5m 3 自卸汽车外运,应运多少车次? 解: (1) ()()()()()3 132303102400.52250.521066400.520.5 4.82250.520.5 4.821410.640.5 4.820.5 4.82400.52250.521232.562245925.50() 6 A m A m A m H V A A A m =+??+?==+?+???+?+??=????????=+?+?+?+= ? ? ???? =?++=自然方量 (2) 35925.504025 4.8 1071.91()1.05 V m -??= =自然方量 (3) 外运的土为虚方 36066.986066.98n==12145 V m =?=虚方(5925.50-1071.91)1.25车
填方区 挖方区 1 T 1 T 1 T 1 T 挖方量 (3 m ) 1 W 15 20 18 240 1000 2 W 70 14 110 170 4000 3 W 15 22 120 200 4000 4 W 10 13 80 160 10000 填方量(3 m ) 1000 7000 2000 9000 19000 注:小格内单位运距为m 。 解: 表中可以看出:x 11+x 21+x 31+x 41=1000 x 11+x 12+x 13=1000 ……………… 利用“表上作业法”进行调配的步骤为: (1)用“最小元素法”编制初始调配方案 步骤1:即先在运距表(小方格)中找一个最小数值,即2170L =,于是先确定 21 X 的 值,使其尽可能地大,即取 21min(1000,4000)1000 X ==。则 1131410 X X X ===,在 空格内画上“×”号,将(1000)填入 21 X 格内; 步骤2:在没有填上数字和“×”号的方格内再选一个运距最小的方格,即4380L =, 让X 43值尽可能的大,即X 43=min(10000,2000)=2000。同时使x 13=x 23=x 33=0。同样将(2000) 填入表1-5中X 43格内,并且在X 13、X 23 、X 33格内画上“×”。 步骤3:按同样的原理,可依次确定x 42=7000,x 12=x 22 =x 32 =0;x 31=300,x 32=x 33 =100,并填入表1-5,其余方格画上“×”,该表即为初始调配方案。 表1-5 土方初始调配方案 填方区 挖方区 1 T 2T 3T 4T 挖方量 (3 m ) 1W 150 200 180 240 1000 × × × (1000) 2 W 70 140 110 170 4000 (1000) × × (3000)
大学计算机基础教程课后习题答案.doc
第一章 1.1946 2.大规模集成电路 3.计算机辅助设计、计算机辅助教学、计算机辅助制造、计算机辅助测试、计算机辅助教育、操作系统 4.人工智能 5.存储程序工作原理 6.运算器 7.RAM 8.逻辑 9.字长 10.位、字节 11.位、字节 12.1024、1024、1024*1024 13.1 14.2 15.48H、65H、97H、32 16.288 17.操作系统 18.程序 19.高级语言 20.机器 21.编译、解释 22.应用、系统 23.输入、输出设备 24 .硬盘 25.高速缓冲存储器 26.传染性 27.2 28.R (文科不做) 29.111111 K 7f (文科不做) 30.213、D5 (文科不做) 第二章 1.255 2.隐藏 3.存档 4.内存条、硬盘 5.Alt
6.[cttl+shift]> [shift+o] [ctrl+space] [ctrl+o] 7.[alt+F4] 8.后台 9.[Shift]> [Ctrl] 10.[Shift] 11.[Ctrl] 12.回收站 13.msconfig 14.单击该按钮会弹出对话框、有下级了菜单、当前状态不可用 15.[Ctrl+Esc]或[win ] 16.最大化或还原 17.分辨率 18.刷新频率 19.磁盘清理 20.[Ctrl+Shift+Delete] 第三章 1.doc 2.我的文档 3.拼写错误、语法错误 4.一行、一段、全部 5.页面 6.回车符号 7.[Alt+Tab] 8.[Ctrl+O] 9.[Ctrl+N] 10.页眉页脚 第四章 1.3、255 2.65536、256 3.[Ctrl+; ]> [Ctrl+Shift+;] 4.= 5.40833 6. 3 7.[ Ctrl ] 8.$ 9.地址栏 10.F2 第五章
基础工程课后练习答案
根据题目要求,b2=(1.5-0.49)/2=0 ?505m 2-8:解:(1)持力层选择:考虑上部荷载不大,粘土层力学性质较 好,较厚(4.5m ),故初步选择持力层为粘土层。 (2) 基础埋深d :标准冻深1.5m ,设计冻深: Sf 叽 讥=1.5*1.0*0.85*0.9=1.15m 基础的最小埋设深度 d mi n =Z d - h max = 1.15-0.84 = 0.31m 基础深度必须大于0.5m ,可初步设定基础深度为1m (原地面以下) (3) 求地基承载力特征值 根据粘性土 e = 0.73, I L = 0.48,查规范表得:n b = 0.3, n d = 1.6 持力层承载力特征值fa (先不考虑对基础宽度进行修正): f a =f a k d r m (d -0.5) =210 1.6 19 0.5=225.2kPa (4) 初步选择基底尺寸 计算基础和回填土重 Gk 时的基础埋深 d=1/2(1 ?0+1?3)=1? 15m 由公式b -士 = 225.2第 1.15 "3,取基础宽度b 为1血。不 需要修正 (5)验算持力层地基承载力 基础和回填土重 确定条形基础底面宽为1?5m (6)刚性基础基础高度的确定 ①素混凝土基础:宽高比取1: 1?25 P k = F k G k A 290 34.5 1.5 = 216.3kPa f a ;满足要求。
基础高度》0.505X 1.25=0?63m,取基础高度为0.70m,分两级台阶,每级台阶为350mm ②砖基础:按照两皮一收的砌法,砖基础所需的台阶数为: (7)柔性基础(钢筋混凝土)基础高度的确定 采用钢筋混凝土条形基础。C20混凝土,ft=1.10N/mm2,钢筋用HPB235级,fy= 210N/mm2 荷载设计值F=1.35Fk=290*1.35=391.5kN/m 基底净反力:pj= - = 3915二261 kPa j b 1.5 1 基础边缘至砖墙计算截面的距离: 6 =丄(1.5 一0.49)= 0.505 2 基础有效高度 21^ 131.80.171m = 171mm 0.7 f t0.7 1100 取基础高度h=250mm h0=250-40-5=205mm( >171mm。 A 4 Q d R M 一Pb2—- 33.28kN *m 2 10.7500 M 33.28 灯06 2 A859mm O.9f y h o 0.9 210 205 1500 - 490 2 60 = 8.4
机器人技术基础试卷
考试科目:机器人技术基础考试时间:120分钟试卷总分IQG分 题号■一--二二三四五六总分 得分 评卷 教师 一、简答题(本大题共3小题,每小题5分,总计15分) 1?示教再现式机器人 答:先由人驱动操作机,再以示教动作作业,将示教作业程序、位置及其他信息存储起来,然后让机器人重现这些动作。(5分) 2?机器人系统结构由哪几个部分组成 答:通常由四个相互作用的部分组成:机械手、环境、任务和控制器。 3?为了将圆柱形的零件放在平板上,机器人应具有几个自由度答:一共需要5个:定位3个,放平稳2个。(5分) (10分)下面的坐标系矩阵B移动距离d=(5 , 2, 6)T: Q 1 Q 2 1 Q Q 4 B = 0 0-16 .0 0 。 1 一 求该坐标系相对于参考坐标系的新位置。 解: (5分) -1 0 0 B neW = 0 1 0 0 0 1 .QQQ 5「0 1 0 21 2 1 0 0 4 6 0 0 -1 6 1 一 00 0 1 一(10 分) (10 分)求点P=(2, 3, 0 ~1 6 12 1 4)T绕X轴旋转45度后相对于参考坐标系的坐标。
第2页共4页 U T B ,已知: 求:工件相对于基座的描述 B T P 0 10-2 0 0-1-3 -10 0 -9 .0 0 0 1 六、(15分)写出3R 平面机械手的各连杆参数和运动学方程(末端相对于基件三臂长位 l 1 、 I 2 、 l 3 ) O 解:各连杆参数如下: 可^1 H 解:P=ROt (X,45) 3=0 久卫 -0.707 3 = -0.707 0.707 - 4_ I I 4.95 一 (10 分) 四、(15分)写出齐次变换矩阵 {A}作以下变换: 绕Z 轴转90o ;( b )再绕X 轴转-90o ;( C )最后做移动(3,7,9) 0 -1 0 3 解:AT = 0 0 1 7 -1 0 0 9 - 0 0 1 (15 分) {u}的描述为U T P ,机器人基座相对于参考系的描述为 - 0 1 0 -H U TP = 0 0 -1 2 -1 0 0 0 - 0 1 一 - 1 0 0 们 ,U TB = 0 1 0 5 0 0 1 9 [ 0 0 0 1 一 解: B B U U -1 u T P = T U T P =[ T B ] T P [1 0 0 -1「0 1 1 0 -5 0 0 -1 2 0 I 0 1 -9 —1 0 0 0 0 0 1 一 0 0 0 1 一 (10 分) (5分) 0 0.707 0.707 0 Pl - 2 B T ,它表示相对固定坐标系 (a 五、(15分)设工件相对于参考系
XML基础教程课后习题解答
XML基础教程课后习题 习题一 1.答:HTML是用来编写Web页的语言、不允许用户自定义标记,HTML体现数据的显示格式。XML描述数据的组织结构、可自定义标记,其标记名称是对标记所包含的数据内容含义的抽象,而不是数据的显示格式。 2.答:使用UTF-8保存 5.答:(1)不可以,(2)可以,(3)不可以 6.答:: time { display:block;font-size:18pt;font-weight:bold } hour { display:line;font-size:16pt;font-style:italic } mimute { display:line;font-size:9pt;font-weight:bold } 习题二1.答:(1)使用ANSI编码。(2)可以。(3)不合理。 2.答:不相同。 3.答:(1)和(2)。 4.答:。 5.答:“root”标记包含的文本内容都是空白字符。“a1”标记包含的文本内容:
机器人技术基础期末考试复习(熊有伦主编)解析
第一章 1机器人组成系统的4大部分:机构部分、传感器组、控制部分、信息处理部分 2机器人学的主要研究内容:研究机器人的控制与被处理物体间的相互关系 3机器人的驱动方式:液压、气动、电动 4机器人行走机构的基本形式:足式、蛇形式、轮式、履带式 5机器人的定义:由各种外部传感器引导的、带有一个或多个末端执行器、通过可编程运动,在其工作空间内对真实物体进行操作的软件可控的机械装置 6机器人的分类:1工业机器人2极限环境作业机器人3医疗福利机器人 7操作臂工作空间形式:1直角坐标式机器人2圆柱坐标式机器人3球坐标式机器人 4 scara 机器人5关节式机器人 8机器人三原则 第一条:机器人不得伤害人类. 第二条:机器人必须服从人类的命令,除非这条命令与第一条相矛盾。 第三条:机器人必须保护自己,除非这种保护与以上两条相矛盾。 第二章 1、什么是位姿:刚体参考点的位置和姿态 2、RPY 角与欧拉角的共同点:绕固定轴旋转的顺序与绕运动轴旋转的顺序相反并且旋转角度相同,能得到相同的变换矩阵,都是用三个变量描述。欧拉角为左乘RPY 角为右乘。 RPY 中绕x 旋转为偏转绕y 旋转为俯仰绕z 旋转为回转 3 、矩阵的左乘与右乘:左乘(变换从右向左)—指明运动相对于固定坐标系 右乘(变换从左向右)—指明运动相对于运动坐标系 4、齐次变换 T A B :表示同一点相对于不同坐标系{B}和{A}的变换,描述{B}相对于{A}的位姿 5、自由矢量:完全由他的维数、大小、方向,三要素所规定的矢量 6、线矢量:由维数、大小、方向、作用线,四要素所规定的矢量 7、齐次变换矩阵 ?? ????=1000 0B A A B A B P R T 8、其次坐标变换?? ??????????=???? ??11000 10P P R P B B A A B A R A B 为旋转矩阵0B A P 为{B}的原点相对{A}的位置矢量 9、旋转矩阵:绕x 轴??????????-a a a a cos sin 0sin cos 0001y 轴??????????-a a a a cos 0sin 010sin 0cos z 轴?? ?? ? ?????-1000cos sin 0sin cos a a a a 10、变换矩阵求逆:?? ? ? ??-=10 0B A T A B T A B B A P R R T 已知B 相对于A 的描述求A 相对于B 的描述
控制工程基础课后答案
第二章 2.1求下列函数的拉氏变换 (1)s s s s F 2 32)(23++= (2)4310)(2+-=s s s F (3)1)(!)(+-= n a s n s F (4)36 )2(6 )(2++=s s F (5) 2222 2) ()(a s a s s F +-= (6))14(21)(2 s s s s F ++= (7)52 1 )(+-= s s F 2.2 (1)由终值定理:10)(lim )(lim )(0 ===∞→∞ →s t s sF t f f (2)1 10 10)1(10)(+-=+= s s s s s F 由拉斯反变换:t e s F L t f ---==1010)]([)(1 所以 10)(lim =∞ →t f t 2.3(1)0) 2()(lim )(lim )0(2 =+===∞ →→s s s sF t f f s t )0()0()()()](['2''0 ' 'f sf s F s dt e t f t f L st --==-+∞ ? )0()0()(lim )(lim '2''0f sf s F s dt e t f s st s --=+∞ →-+∞ +∞→? 1 )2()(lim )0(2 2 2 ' =+==+∞→s s s F s f s (2)2 ) 2(1 )(+= s s F , t te s F L t f 21)]([)(--==∴ ,0)0(2)(22' =-=--f te e t f t t 又,1 )0(' =∴f 2.4解:dt e t f e t f L s F st s --?-==202)(11 )]([)( ??------+-=2121021111dt e e dt e e st s st s