我的世界利用未加载区块挂机原理和教程详解

我的世界利用未加载区块挂机原理和教程详解我的世界利用未加载区块挂机原理和教程详解,我的世界怎么利用未加载区块挂机?,希望这篇我的世界利用未加载区块挂机原理和教程详解,能够帮助到各位正在玩我的世界的玩家朋友们!我的世界利用未加载区块挂机原理和教程详解
那么其他的东西在未加载的区块里会有什么表现呢? 我们应该了解一下未加载区块的本质。已探索过的未加载区块中的信息被存在硬盘中。这就说明为什么我们建了一个牛棚然后出去探险了好几千米回来之后牛还都在。
掉落在地上可捡起的物品也是同样的道理。如果这些物品在未加载区块里他们就会被当做信息存在硬盘中。
众所周知,物品消失的时间是5分钟。如果物品在未加载区块的话他们会一直存在,直到玩家激活这个区块。
利用这个道理,我们可以把我们的小麦农场,刷怪塔,西瓜农场等等等等的掉落物品运送至未激活区块,让它们在那里累积并且防止它们消失从而达到挂机的目的。
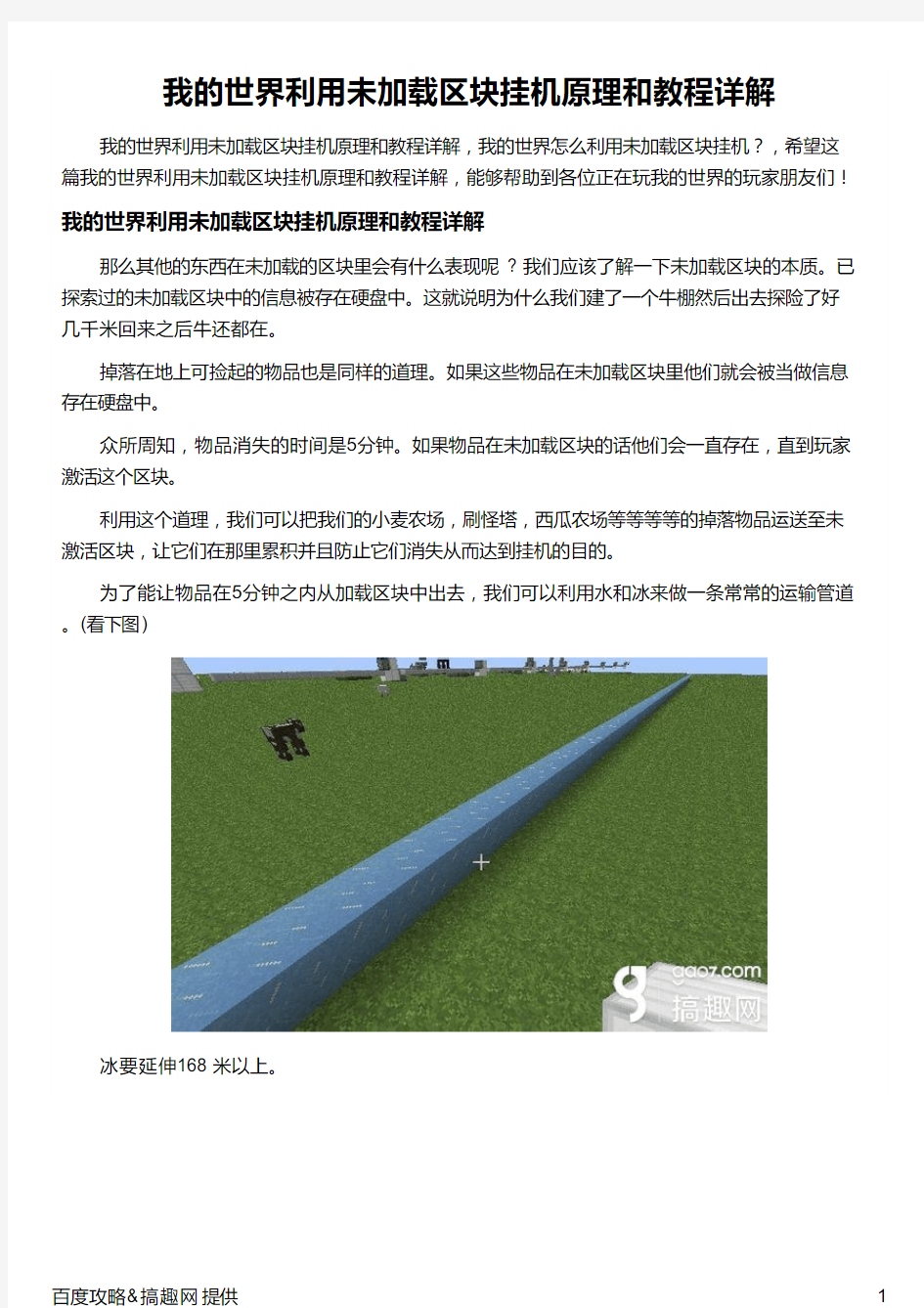
为了能让物品在5分钟之内从加载区块中出去,我们可以利用水和冰来做一条常常的运输管道。(看下图)
冰要延伸168 米以上。
放上挡水的墙壁和水。
可以用倒立半砖来放置第二个水源。
我们可以把这条管道连接到我们的农场里,这样就可以挂机了~
举个例子我们为什么要用挂机管道。说,假如我有个大工程需要很多TNT来清地。我把挂机管道连接到我的刷怪塔里。如果一个小时我的刷怪塔给我1000个火药,我去睡一晚上,8个小时之后我将会有8000个火药。
小编推荐:
责任编辑【未命名】
舵机原理
1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1) 发动机进气量,来控制发动机的拉力(或推力); 2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横 滚运动; 3) 水平尾舵面,用来控制飞机的俯仰角; 4) 垂直尾舵面,用来控制飞机的偏航角; 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操 作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而
机械原理课程设计 摇摆送料机构
机械原理课程设计说明书 题目:摆式送料机构总体设计 姓名:冯帅 学号: 专业: 班级: 学院:交通与车辆工程学院 指导教师: 2013年7月9日
目录 第一章机械原理课程设计指导书 (2) 一.机械原理课程设计的目的 (2) 二.机械原理课程设计的任务 (2) 三.课程设计步骤 (2) 四.基本要求 (3) 五.时间安排 (3) 六.需交材料 (3) 第二章摆式送料机构总体设计过程 (3) 一工作原理 (3) 二设计方案 (5) 三利用解析法确定机构的运动尺寸 (6) 四连杆机构的运动分析 (10) ⑴速度分析 (10) ⑵加速度分析 (12) 第三章课程设计总结 (14) 第四章参考文献 (14)
第一章机械原理课程设计指导书 一.机械原理课程设计的目的 机械原理课程设计是机械原理课程教学中最后的一个重要的实践性教学环节,是培养学个进行自动机械总体方案设计、运动方案设计、执行机构选型设计,传动方案设计控制系统设计以及利用用计算机对工程实际中各种机构进行分析和设计能力的一个重要的川练过程。其目的如下: (1)通过课程设计,综合运用所学的知识,解决工程实际问题。并使学生进一步巩固和加深所学的理论知识。 (2)使学生得到拟定机械总体方案、运动方案的训练,并且有初步的机械选型与组合及确定传动方案的能力,培养学生开发、设计、创新机械产品的能力。 (3)使学生掌握自动机械设计的内容、方法、步骤,并对动力分析与设计有个较完整的概念。 (4)进一步提高学生的运算、绘图、表达及运用计算机和查阅有关技术资料的能力。 (5)通过编写说明书,培养学生的表达、归纳及总结能力。 二.机械原理课程设计的任务 机械原理课程设计的任务一般分为以下几部分。 (1)根据给定机械的工作要求,合理地进行机构的选型与组合。 (2)拟定该自动机械系统的总体、运动方案(通常拟定多个),对各运动方案进行对比和选择,最后选定一个最佳方案作为个设计的方案,绘出原理简图。 (3)传动系统设计,拟定、绘制机构运动循环图。 三.课程设计步骤 1.机构设计和选型 (1)根据给定机械的工作要求,确定原理方案和工艺过程。 (2)分析工艺操作动作、运动形式和运动规律。 (3)拟定机构的选型与组合方案,多个方案中选择最佳的。 (4)设计计算。 (5)结构设计、画图。 (6)编写设计计算说明书。 2.自动机械总体方案设计 (1)根据给定机械的工作要求,确定实现功能要求原理方案。 (2)根据原理方案确定工艺方案和总体结构。 (3)拟定工作循环图。 (4)设计计算。 (5)画图。
机械原理课程设计凸轮设计
机械原理课程设计 编程说明书 设计题目:牛头刨床凸轮机构指导教师:王琦王春华设计者:雷选龙 学号:0807100309 班级:机械08-3 2010年7月15日 辽宁工程技术大学
机械原理课程设计任务书(二) 姓名雷选龙专业机械工程及自动化班级机械08-3班学号 五、要求: 1)计算从动件位移、速度、加速度并绘制线图。 2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。以上内容作在A2或A3图纸上。 3)编写出计算说明书。 指导教师: 开始日期:2010年07月10日完成日期:2010年07月16日
目录 一设计任务及要求-----------------------------------------------2 二数学模型的建立-----------------------------------------------2 三程序框图--------------------------------------------------------5 四程序清单及运行结果-----------------------------------------6 五设计总结-------------------------------------------------------14 六参考文献-----------------------------------------------------15
一 设计任务与要求 已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ?=70,摆杆长度l 09D =125,最大摆角φ max =15,许用压力角[α]=40,凸轮与曲线共轴。 (1) 要求:计算从动件位移、速度、加速度并绘制线图(用方格纸 绘制),也可做动态显示。 (2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线, 并按比例绘出机构运动简图。 (3) 编写计算说明书。 二 机构的数学模型 1 推程等加速区 当2/0?δ≤≤时 角位移 22max /21?δ?=m 角速度 2max /4?δ?ω= 角加速度 2max /4??ε= 2 推程等减速区 当?δ?≤<2/时 角位移 22max max /)(21?δ???--=m 角速度 2max /)(4?δ??ω-= 角加速度 2max /4??ε-= 3 远休止区 当s ??δ?+≤<时 角位移 max 1?=m 角速度 0=ω 角加速度 0=ε
区块链技术原理详解
区块链技术原理详解以数据库思维理解区块链
作为一个数据库行业的老兵,我看到在区块链技术的热潮下,传统的IT技术同学们保持了十分理性,甚至是排斥的态度。其实不管是热捧还是排斥,两极观点之下,我认为我们应该从IT人比较能够理解的角度探讨一下区块链技术。因为区块链这个东西的本质和数据库技术非常相像,很多机制使用数据库的理念去理解会非常直观准确。 对于区块链和传统数据技术,我认为区块链技术的未来发展,主题是“融合”。我们就从数据库这个角度来解读区块链技术体系中各个技术点,以及通过“去中心化数据库”这个概念,把区块链与数据库技术做一个比较好的整合。 一、区块链技术现状 当前的区块链世界有人号称1.0、2.0、甚至已经到了3.0时代,但是从一个产品或技术打磨的角度来看,我认为当前的区块链也就相当于数据库的80年代,处于百花争鸣各种思想层出不穷的时代。对技术人来说,这是最好的时代,各种新鲜的想法和思路大量爆发,在沉闷的技术领域带来新鲜的突破;同时这也是最坏的时代,没有任何产品或方向肯定是未来的主流,任何新鲜的思路也许在几个月以后就被证明不可行。 所以,我们要正确认知当前区块链技术的变革和发展,那我们来对比当年数据库所走过的道路,看看未来区块链世界会怎样发展。
1、技术演进路程 首先我认为,区块链一定会从当前的专有化向通用化演进。现在基本所有做公链的产品都是针对某一个特定的场景来实现与优化,但是我认为未来一定不会是一个应用一条链,而是有一种通用的开发范式。就好像传统数据库一样,不管大家开发什么样的应用程序,都可以使用这么若干有限的几个通用性产品就能够满足大部分业务场景了。 第二,向标准化演进。对于区块链技术,现在每个链基本都有自己的开发范式,甚至很多公链还模仿以太坊尝试自己做一个编程语言出来,这实际上是一种行业处于原始时期的标志。怎样判断一个行业
舵机的工作原理
基于AT89C2051单片机的多路舵机控制器设计 摘要舵机是机器人、机电系统和航模的重要执行机构。舵机控制器为舵机提供必要的能源和控制信号。本文提出一种以外部中断计数为基础的PWM波形实现方法。该方法具有简单方便,成本低,可实现多路独立PWM输出的优点。 关键词A T89C205l 舵机控制器外部中断PWM 舵机是一种位置伺服的驱动器。它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。在微机电系统和航模中,它是一个基本的输出执行机构。 1 舵机的工作原理 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA66881。的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送人电机驱动集成电路BA6686,以驱动电机正反转。当电机转速一定时,通过级联减速齿轮带动电位器R。,旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。 2 舵机的控制方法 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。 3 舵机控制器的设计 (1)舵机控制器硬件电路设计 从上述舵机转角的控制方法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号(PWM)。该方波信号可由FPGA、模拟电路或单片机来产生。采用FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出。一般采用单片机作舵机的控制器。目前采用单片机做舵机控制器的方案比较多,可以利用单片机的定时器中断实现PWM。该方案将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1。Th、T1的时间值随脉冲宽度的变换而变化,但,Th+T1=20ms。该方法的优点是,PWM信号完全由单片机内部定时器的中断来实现,不需要添加外围硬件。缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较麻烦;为了满足20ms 的周期,单片机晶振的频率要降低;不能实现多路输出。也可以采用单片机+8253计数器的实现方案。该方案由单片机产生计数脉冲(或外部电路产生计数脉冲)提供给8253进行计数,由单片机给出8253的计数比较值来改变输出脉宽。该方案的优点是可以实现多路输出,软件设计较简单;缺点是要添加l片8253计数器,增加了硬件成本。本文在综合上述两个单片机舵机控制方案基础上,提出了一个新的设计方案,如图4所示。 该方案的舵机控制器以A T89C2051单片机为核心,555构成的振荡器作为定时基准,单片机通过对555振荡器产生的脉冲信号进行计数来产生PWM信号。该控制器中单片机可以产生8个通道的PWM信号,分别由AT89C2051的P1.0~Pl.7(12~19引脚)端口输出。输出的8路PWM信号通过光耦隔离传送到下一级电路中。因为信号通过光耦传送过程中进行了反相,因此从光耦出来的信号必须再经过反相器进行反相。方波信号经过光耦传输后,前沿和后沿会发生畸变,因此反相器采用CD40106施密特反相器对光耦传输过来的信号进行整形,产生标准的PWM方波信号。笔者在实验过程中发现,舵机在运行过程中要从电源
机械原理课程设计指导手册
一、课程设计的意义、内容及步骤 随着生产技术的不断发展,机械产品种类日益增多,对产品的机械自动化水平也越来越 高,因此,机械设备设计首先需要进行机械运动方案的设计和构思、各种传动机构和执行机 构的选用和创新设计。本指导书旨在根据高校工科本科《机械原理课程教学基本要求》的要 求:结合一个简单的机械系统,综合运用所学理论和方法,使学生能受到拟定机械运动方案的初步训练,并能对方案中某些机构进行分析和设计,针对某种简单机器(即工艺动作过程 较简单)进行机构运动简图设计。 设计过程指从明确设计任务到编制技术文件为止的整个设计工作的过程,该过程一般来 讲包括四个阶段:1)明确设计任务和要求;2)原理方案设计;3)技术设计;4)施工设计。本 次设计的主要内容主要完成前两个任务,完成的步骤如下; 设汁任务I神服文现礴足列施的罐本原现-T星本T艺劭怦的即是I-二选揮执行机构亍■ 绘制机构运功祁画I_ 黴新瓦标詡示直图I一匹苻机狷矗尺可金豕迄功学设审一I绘制机购运动简圏I 运动学和动力学分析If进行评价比较优选I 二、机械原理课程设计的基本要求 1.设计结果体现创新精神。 2.方案设计阶段以小组为单位,组织学生参观讨论,分析机器的结构、传动方式、工 作原理,给出至少两种运动方案,并对其进行比较,从中选出最优方案。 3.方案确定以后,进行机构尺寸综合和机构运动分析时,每个学生的参数不同,独自 设计。若发现尚未达到工作要求,应审查方案,调整机构的尺寸,重新进行设计。 4.每个学生绘制一张图纸,应包括机械系统运动方案简图和机械运动循环图,一两个 主要机构的运动分析及设计程序。 5.写一份设计说明书,最后进行答辩。 6.成绩的评定。课程设计的成绩单独评定。应以设计说明书、图样和在答辩中回答问题的情况为依据, 参考设计过程中的表现,由指导教师按五级计分制(优、良、中、及格、不及格)进行评定。 、机械运动简图设计内容 1?功能分解 机器的功能是多种多样的,但每一种机器都要完成某一工艺动作过程。将机械所需完 成的工艺动作过程进行分解,即将总功能分解为多个功能元,在机械产品中就是将工艺动作 过程分解为若干个执行动作。设计者必须把动作过程分解为几个独立运动的分功能,然后用 树状功能图来描述,使机器的总的功用及各分功能一日了然。 例如,设计一部四工位专用机床,它可以分解成如下几个工艺动作:
区块链的核心技术原理及特征
区块链的核心技术原理及特征 区块链的概念和特征 区块链(Blockchain)是一系列现有成熟技术的有机组合,它对账本进行分布式的有效记录,并且提供完善的脚本以支持不同的业务逻辑。在典型的区块链系统中,数据以区块(block)为单位产生和存储,并按照时间顺序连成链式(chain)数据结构。所有节点共同参与区块链系统的数据验证、存储和维护。新区块的创建通常需得到全网多数(数量取决于不同的共识机制)节点的确认,并向各节点广播实现全网同步,之后不能更改或删除。从外部来看,区块链系统应具备如下特征: ·多方写入,共同维护 此处的多方仅指记账参与方,不包含使用区块链的客户端。区块链的记账参与方应当由多个利益不完全一致的实体组成,并且在不同的记账周期内,由不同的参与方主导发起记账(轮换方式取决于不同的共识机制),而其他的参与方将对主导方发起的记账信息进行共同验证。 ·公开账本 区块链系统记录的账本应处于所有参与者被允许访问的状态,为了验证区块链记录的信息的有效性,记账参与者必须有能力访问信息内容和账本历史。但是公开账本指的是可访问性的公开,并不代表信息本身的公开,因此,业界期望将很多隐私保护方面的技术,如零知识证明、同态加密、门限加密等,应用到区块链领域,以解决通过密文操作就能验证信息有效性的问题。 ·去中心化 区块链应当是不依赖于单一信任中心的系统,在处理仅涉及链内封闭系统中的数据时,区块链本身能够创造参与者之间的信任。但是在某些情况下,如身份管理等场景,不可避免的会引入外部数据,并且这些数据需要可信第三方的信任背书,此时对于不同类型的数据,其信任应来源于不同的可信第三方,而不是依赖于单一的信任中心。在这种情况下,区块链本身不创造信任,而是作为信任的载体。
航模舵机控制原理详解
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
舵机控制原理详细资料
目录 一.舵机PWM信号介绍 (1) 1.PWM信号的定义 (1) 2.PWM信号控制精度制定 (2) 二.单舵机拖动及调速算法 (3) 1.舵机为随动机构 (3) (1)HG14-M舵机的位置控制方法 (3) (2)HG14-M舵机的运动协议 (4) 2.目标规划系统的特征 (5) (1)舵机的追随特性 (5) (2)舵机ω值测定 (6) (3)舵机ω值计算 (6) (4)采用双摆试验验证 (6) 3.DA V的定义 (7) 4.DIV的定义 (7) 5.单舵机调速算法 (8) (1)舵机转动时的极限下降沿PWM脉宽 (8) 三.8舵机联动单周期PWM指令算法 (10) 1.控制要求 (10) 2.注意事项 (10) 3.8路PWM信号发生算法解析 (11) 4.N排序子程序RAM的制定 (12) 5.N差子程序解析 (13) 6.关于扫尾问题 (14) (1)提出扫尾的概念 (14) (2)扫尾值的计算 (14)
一.舵机PWM 信号介绍 1.PWM 信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 目前,北京汉库的HG14-M 舵机可能是这个过渡时期的产物,它采用传统的PWM 协议,优缺点一目了然。优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM 格式。 但是它是一款数字型的舵机,其对PWM 信号的要求较低: (1) 不用随时接收指令,减少CPU 的疲劳程度; (2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机; 其PWM 格式注意的几个要点: (1 ) 上升沿最少为0.5mS ,为0.5mS---2.5mS 之间; (2) HG14-M 数字舵机下降沿时间没要求,目前采用0.5Ms 就行;也就是说PWM 波形可以是一个周 期1mS 的标准方波; (3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM 信号;它也可以输入一个周期为1mS 的标 准方波,这时表现出来的跟随性能很好、很紧密。 图1-1
机械原理课程设计指导
机械原理课程设计指导 一、课程设计的目的和内容 1 课程设计的目的 1.巩固并灵活运用所学相关知识; 2.具有初步的设计机械运动方案的能力; 3.提高分析问题、解决问题的能力; 4.提高创新意识和能力; 5.培养运用现代设计方法解决工程问题的能力。 2. 课程设计的任务 (进行机械系统的运动方案和传动系统设计) 确定工作原理和运动形式,绘制工作循环图; 设计几种运动方案并进行分析、比较和选择; 对选定运动方案进行运动分析与综合,并绘制机构运动简图; 进行机械动力性能分析与综合; 编写说明书及相关程序。 3.课程设计的内容 机械原理课程设计,通常以满足一定使用要求或工艺要求的机械为设计对象。 机械原理课程设计,通常包括下列内容: 机械系统方案的拟定; 机械系统运动动力参数计算; 设计计算说明书一份。 完成规定的全部工作后,应进行设计答辩。
二、课程设计的一般步骤 1. 设计准备 1)阅读和研究设计任务书,明确设计内容和要求,分析原始数据及工作条件。 2)借阅(图书馆)、搜集(含网上搜集)有关设计信息、资料及机构设计手册;复习课程有关内容,熟悉有关机构的设计方法,拟定设计计划,准备设计资料。 2. 机械系统的方案设计 机械产品是以机械运动为特征的技术系统,机械系统方案设计的核心是机械运动方案设计,它在机械系统设计的总体中,占有十分重要的地位,也是最具创造性和综合性的内容。 1)机械执行系统运动方案设计 执行系统是机械系统中的重要组成部分,是直接完成机械系统预期工作任务的部分。执行系统由一个或多个执行机构组成。 执行构件是执行机构的输出构件,其数量及运动形式、运动规律和传动特性等要求,决定了整个执行系统的结构方案。机械执行系统的方案设计是机械系统总体方案设计的核心,是整个机械原理工作的基础。 执行系统方案设计的内容 功能原理设计:就是根据机械预期实现的功能,考虑选择何种工作原理来实现这一功能要求。 运动规律设计:是指为实现上述工作原理而决定选择何种运动规律。 执行机构型式设计:是指究竟选择何种机构来实现上述运动规律。 执行机构的协调设计:就是根据工艺过程对各动作的要求,分析各执行机构应当如何协调和配合,设计出协调配合图。 机构尺度设计:是指对所选择的各个执行机构进行运动和动力设计,确定各执行机构的运动尺寸,绘制出各执行机构的运动简图。
区块链技术的工作原理
区块链技术的核心是所有当前参与的节点共同维护交易及数据库,它使交易基于密码学原理而不基于信任,使得任何达成一致的双方,能够直接进行支付交易,不需第三方的参与。 从技术上来讲,区块是一种记录交易的数据结构,反映了一笔交易的资金流向。系统中已经达成的交易的区块连接在一起形成了一条主链,所有参与计算的节点都记录了主链或主链的一部分。一个区块包含以下三部分:交易信息、前一个区块形成的哈希散列、随机数。交易信息是区块所承载的任务数据,具体包括交易双方的私钥、交易的数量、电子货币的数字签名等;前一个区块形成的哈希散列用来将区块连接起来,实现过往交易的顺序排列;随机数是交易达成的核心,所有矿工节点竞争计算随机数的答案,最快得到答案的节点生成一个新的区块,并广播到所有节点进行更新,如此完成一笔交易。 什么是区块链? 区块链(BlockChain)是指通过去中心化和去信任的方式集体维护一个可靠数据库的技术方案。该技术方案主要让参与系统中的任意
多个节点,通过一串使用密码学方法相关联产生的数据块(block),每个数据块中包含了一定时间内的系统全部信息交流数据,并且生成数据指纹用于验证其信息的有效性和链接(chain)下一个数据库块。 通俗一点说,区块链技术就指一种全民参与记账的方式。所有的系统背后都有一个数据库,也就是一个大账本。那么谁来记这个账本就变得很重要。目前就是谁的系统谁来记账,各个银行的账本就是各个银行在记,支付宝的账本就是阿里在记。但现在区块链系统中,系统中的每个人都可以有机会参与记账。在一定时间段内如果有新的交易数据变化,系统中每个人都可以来进行记账,系统会评判这段时间内记账最快最好的人,将其记录的内容写到账本,并将这段时间内账本内容发给系统内所有的其他人进行备份。这样系统中的每个人都了一本完整的账本。因此,这些数据就会变得非常安全。篡改者需要同时修改超过半数的系统节点数据才能真正的篡改数据。这种篡改的代价极高,导致几乎不可能。例如,比特币运行已经超过7年,全球无数的黑客尝试攻击比特币,但是至今为止没有出现过交易错误,可以
机械原理课程设计指导书
机械原理课程设计指导书 四冲程内燃机设计 一. 已知条件: 在图1所示的四冲程内燃机中(不同方案对应不同数据,见数据分配表) 活塞行程 H = (mm ) 活塞直径 D= (mm ) 活塞移动导路相对于曲柄中心的距离 e= (mm ) 行程速比系数 K= 连杆重心2c 至A 点的距离 2AC l = 系 数 AB l (mm) 曲柄重量 1Q = (N) 连杆重量 2Q = (N) 活塞重量 3Q = (N) 连杆通过质心轴2c 的转动惯性半径c ρ 2c ρ= 系数AB l 2(m 2m ) 曲柄的转速 n 1= (rpm) 发动机的许用速度不均匀系数 [δ]= 曲柄不平衡的重心到O 点的距离 OC l = OA l (mm ) 开放提前角: 进气门:-10°;排气门: -32° 齿轮参数: m=3.5(mm ); α=20°;a h *=1 2Z =' 2Z =14; 3Z ='3Z =72 ;1Z =36 示功图见P9图2所示。 二.设计任务 1. 机构设计 按照行程速比系数K 及已知尺寸决定机构的主要尺寸,并绘出机构运动 简图(4号图纸)。(凸轮要计算出装角后才画在该图上) 2. 选定长度比例尺作出连杆机构的位置图 以活塞在最高位置时为起点,将曲柄回转一周按顺时针方向分为十二等
分,然后找出活塞在最低位置时和活塞速度为最大时的曲柄位置(即曲柄旋转一周共分十五个位置)并作出机构各位置时的机构位置图,求出滑快的相对位移。 3. 作出机构15个位置的速度多边形 求出这15个位置的BA V 、2C V 、B V 、ω2的数值,并列表表示。(表一) 4. 作出机构的15个位置的加速度多边形 求出15个位置的n BA a 、t BA a 、BA a 、2α 、2C a 、B a 的数值,并列 表表示。(表二) 5.用直角坐标作滑快B 点的位移曲线B S =B S (φ),速度曲线)(?B B V V =及加速度曲线)(?B B a a =。(把以上2、3、4、5作在一张2号图纸上) 6. 动态静力分析(1号图纸) 求出机构在各位置时各运动副的反力及应加于曲柄OA 的平衡力矩 b M (每人完成五个位置)各种数据均要列表表示: (1) 将各个位置的2I P 、2I M 、3I P 等数值列于表三。 (2) 列出各个位置的t R 12的计算公式,并计算出其数值。 (3) 将各个位置的'p 、n R 12、t R 12、12R 、03R 、23R 等数值列于 表四。 (4) 将各个位置的01R 、b M 等数值列于表五 (5) 将各个位置的'p 、b p 、'b M 等数值列于表六 (6) 将'b M 与b M 进行比较,计算出它们的误差,把结果列于表 七。 7. 用直角坐标作出b M =b M (φ)曲线。(用方格纸绘制) (b M 统一用“动态静力分析”所求得的值) 8. 计算当不考虑机构各构件的质量和转动惯量时的飞轮转动惯量F J 。 9. 计算发动机功率。 10. 用图解法设计凸轮Ⅰ、Ⅱ的实际轮廓曲线(3号图纸)
区块链特征与原理概要
区块链特征与原理概要 一、区块链的特征 1-去中介化的信任,这也是反复强调的,不是去中心化而是去中介化,不谋而合。 2-稳定性、可靠性、持续性,因为它是一个分布式的网络架构,没有一个中心节点可以被打击或者攻击,所以在整体的技术布置方面有着更强的稳定性、可靠性和持续性。 3-强安全、共识机制不需要第三方的进入,而是通过一个技术来达到,先前预定的一个技术来达到整个交易的完成。 4-是交易的公开透明和不可篡改性。 以上四点就是重庆金窝窝集团分析出的区块链技术运用的特点。 区块链技术是大数据衍生出来的底层技术,像一个数据库记录所有相关重要数据,那么金窝窝集团研究表示区块链技术的特征有如下有点: 1-去中心化; 2-透明性; 3-开放性; 4-自治性; 5-信息不可篡改; 6-匿名性。 使看到一些争论区块链定义的回答,突然意识到自己这篇解释原理的回答其实是一直是对着比特币撸的,介于区块链的定义业界并没有一个特别明确和唯一的回答,介于比特币目前是区块链最典型且最有影响力的应用之一,理解比特币如何使用区块链后,再去理解其他形式各样的区块链应用就会容易很多。区块链的共识机制各自的优缺点是什么? 1.用了具有 "哈希链" (下文有解释) 形式的数据结构保存基础数据 2.有多个结点参与系统运行(分布式) 3.通过一定的协议或算法对于基础数据的一致性达成共识(共识协议/算法)。 目前主要包括:PoW、PoS、DPoS,dBFT。 1、PoW即工作量证明 优点: 1)算法简单,容易实现; 2)节点间无需交换额外的信息即可达成共识; 3)破坏系统需要投入极大的成本; 缺点: 1)浪费能源; 2)区块的确认时间难以缩短; 3)新的区块链必须找到一种不同的散列算法,否则就会面临比特币的算力攻击; 4)容易产生分叉,需要等待多个确认; 5)永远没有最终性,需要检查点机制来弥补最终性;
舵机原理及其使用详解
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
机械原理课程设计报告书
成绩 机械原理课程设计 设计题目平压印刷机机构 学院工学院 专业年级机制122 宋宏泽 同组王琳王旭侯善蕾 指导教师海蓉 (2014 年7月) 中国农业大学教务处制
本科生课程设计任务书 2013 —2014 学年夏季学期 工学院机械设计制造及其自动化专业课程设计名称:机械原理课程设计 设计题目:平压印刷机机构设计 完成期限:自2014 年6 月30 日至2014 年7 月9 日共1.5 周设计依据、要求及主要容(可另加附页): 一、设计参数 由于是自拟题目,故设计参数需要根据背景调查,结合设计考虑,进行自行拟定。 二、设计任务 1、绘制整机工作的运动循环图 2、设计减速系统 3、设计执行机构 三、要求 1、设计报告正文中必须包含 机构的尺寸设计和参数设计 必要的图示说明、解析式推导过程 编制程序的流程框图 解析式与程序中的符号对照表 源程序清单 打印结果(含量纲的数表、图形) 2、设计报告格式要求 word文档打印设计报告(用语规,标点符号正确,无错别字) C语言程序(或其它)进行运动分析与受力分析 excel(或其它)打印数表与曲线 cad、flash/PPT(或其它)绘制机构运动简图 Inventor(或其它)表现三维效果——选做
3、课程设计报告装订顺序 统一格式封皮 统一格式任务书 统一格式目录 统一格式正文 设计总结(心得体会、建议等——言简意赅) 统一格式参考文献 四、参考文献 参阅《机械原理辅助教材》中所列参考文献 五、设计进度建议 第1周: 周一:讲课,布置设计题目,课程设计实习 周二:实验室看模型,查阅资料,绘制运动循环图,拟定运动方案,绘制机构运动简图周三~周四:方案设计草图机构设计和分析,推导解析式,编制程序 周五:数学模型,编制程序,上机调试,设计报告定稿 周六~周日:确定参数 第2周: 周一~周二:交设计报告,答辩 指导教师(签字):
区块链技术深度剖析课程大纲
课程名称:区块链技术深度剖析 课程编码: 课程学分:2学分 课程学时:32学时 适用专业:网络空间安全,信息安全 《区块链技术深度剖析》 The Depth of Analysis Blockchain Technology 教学大纲 一、课程性质与教学目标 性质:本课程属于网络空间安全专业的兴趣选修课程。本课程的主要目的是让学生学习和了解区块链的起源、发展以及各行业的应用需求;理解和掌握区块及链、密码技术、共识机制、激励机制、智能合约、P2P网络等的基本原理和实践应用,掌握比特币源码及典型密码算法的应用;领会区块链中安全机制的设计思想、区块链未来的应用价值和发展趋势。 教学目标:让学生掌握区块链中安全设计与分析的基础知识,培养其应用区块链原理,准确分析各行业中存在的去中心化信任、公开透明、不可篡改、不可伪造以及跟踪溯源等安全问题,设计和使用区块链技术解决各行业应用问题。二、教学基本内容及基本要求 通过课堂教学结合实践应用使学生了解区块链的发展及其研究的主要内容,掌握区块链的主要知识体系、基本理论;学会使用典型的密码算法,解决各行业应用的安全问题;通过课堂讲解、讨论和学生课下阅读、思考以及上机调试代码,了解区块链在各行业中的应用需求,能够把密码思想融入到社会生活中,把密码工具应用到区块链系统中,解决一些实际问题。 第1章区块链概述 (一)基本要求 1、掌握:区块链安全思想,区块链分类,区块链技术原理; 2、理解:区块链和信息安全、密码技术的关系; 3、了解:区块链的发展史、能解决的行业问题以及未来的发展趋势。(二)教学及考核内容 1.1 构建信任社会 1.2 区块链与密码学 1.3 区块链技术原理
舵机控制原理以及分类作用
一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,
输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
一文讲透区块链技术原理(含算法)
一文讲透区块链技术原理(含算法) 区块链是什么? “区块链”技术最初是由一位化名中本聪的人为比特币(一种数字货币)而设计出的一种特殊的数据库技术,它基于密码学中的椭圆曲线数字签名算法(ECDSA)来实现去中心化的P2P 系统设计。但区块链的作用不仅仅局限在比特币上。现在,人们在使用“区块链”这个词时,有的时候是指数据结构,有时是指数据库,有时则是指数据库技术,但无论是哪种含义,都和比特币没有必然的联系。 从数据的角度来看:区块链是一种分布式数据库(或称为分布式共享总账,DistributedShared Ledger),这里的“分布式”不仅体现为数据的分布式存储,也体现为数据的分布式记录(即由系统参与者来集体维护)。简单的说,区块链能实现全球数据信息的分布式记录(可以由系统参与者集体记录,而非由一个中心化的机构集中记录)与分布式存储(可以存储在所有参与记录数据的节点中,而非集中存储于中心化的机构节点中)。 从效果的角度来看:区块链可以生成一套记录时间先后的、不可篡改的、可信任的数据库,这套数据库是去中心化存储且数据安全能够得到有效保证的。 结论:区块链是一种把区块以链的方式组合在一起的数据结构,它适合存储简单的、有先后关系的、能在系统内验证的数据,用密码学保证了数据的不可篡改和不可伪造。它能够使参与者对全网交易记录的事件顺序和当前状态建立共识。 如今的区块链技术概括起来是指通过去中心化和去信任的方式集体维护一个可靠数据库的技术。其实,区块链技术并不是一种单一的、全新的技术,而是多种现有技术(如加密算法、P2P文件传输等)整合的结果,这些技术与数据库巧妙地组合在一起,形成了一种新的数据记录、传递、存储与呈现的方式。简单的说,区块链技术就是一种大家共同参与记录信息、存储信息的技术。过去,人们将数据记录、存储的工作交给中心化的机构来完成,而区块链技术则让系统中的每一个人都可以参与数据的记录、存储。区块链技术在没有中央控制点的分布式对等网络下,使用分布式集体运作的方法,构建了一个P2P的自组织网络。通过复杂的校验机制,区块链数据库能够保持完整性、连续性和一致性,即使部分参与人作假也无法改变区块链的完整性,更无法篡改区块链中的数据。区块链技术涉及的关键点包括:去中心化(Decentralized)、去信任(Trustless)、集体维护(Collectively maintain)、可靠数据库(ReliableDatabase)、时间戳(Time stamp)、非对称加密(AsymmetricCryptography)等。 区块链技术重新定义了网络中信用的生成方式:在系统中,参与者无需了解其他人的背景资料,也不需要借助第三方机构的担保或保证,区块链技术保障了系统对价值转移的活动进行记录、传输、存储,其最后的结果一定是可信的。 区块链技术原理的来源可归纳为一个数学问题:拜占庭将军问题。拜占庭将军问题延伸到互联网生活中来,其内涵可概括为:在互联网大背景下,当需要与不熟悉的对手方进行价值交换活动时,人们如何才能防止不会被其中的恶意破坏者欺骗、迷惑从而做出错误的决策。进一步将拜占庭将军问题延伸到技术领域中来,其内涵可概括为:在缺少可信任的中央节点和
舵机原理
舵机原理 2009-11-09 19:03 1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1.发动机进气量,来控制发动机的拉力(或推力); 2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动; 3.水平尾舵面,用来控制飞机的俯仰角; 4.垂直尾舵面,用来控制飞机的偏航角; 遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。舵机因此得名:控制舵面的伺服电机。 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信 号待会再讲),控制电机转动,电机带动一系列齿轮组,减 速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相 连的,舵盘转动的同时,带动位置反馈电位计,电位计将输 出一个电压信号到控制电路板,进行反馈,然后控制电路板 根据所在位置决定电机的转动方向和速度,从而达到目标停 止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就 有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动 和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速 之分,体积有大中小三种之分等等,组合不同,价格也千差 万别。例如,其中小舵机一般称作微舵,同种材料的条件下 是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据 需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的 是地线,这辆根线给舵机提供最基本的能源保证,主要是电 机的转动消耗。电源有两种规格,一是4.8V,一是6.0V, 分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要 大一些,具体看应用条件;另外一根线是控制信号线,Futaba 的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA 的某些型号的舵机引线电源线在边上而不是中间,需要辨 认。但记住红色为电源,黑色为地线,一般不会搞错。