永磁无刷直流电机系统建模与仿真
直流电动机开环调速系统设计与仿真
东北大学秦皇岛分校控制工程学院自动控制系统课程设计 设计题目:直流电动机开环调速系统 设计与仿真 专业名称自动化 班级学号 学生姓名 指导教师 设计时间2015.7.13~2014.7.24 成绩
目录 1.设计任务书 (3) 2.概述 (4) 2.1前言 (4) 2.2 系统原理 (4) 2.3 simulink框图 (5) 3.元件参数设置 (7) 3.1三相交流电压源设置 (7) 3.2.同步六脉冲触发器 (7) 3.3.三相全控桥整流电路 (8) 3.4.直流电动机设计 (8) 4.仿真结果分析 (9) α=时 (12) 4.2 当30o α=时 (14) 4.3 当60o α=时 (17) 4.4 当90o 4.5励磁电流 (19) 5.结论 (20) 6.参考文献 (22) 7.结束语 (22)
东北大学秦皇岛分校控制工程学院 《自动控制系统》课程设计任务书 专业自动化班级姓名 设计题目:直流电动机开环调速系统设计与仿真 一、设计实验条件 地点:实验室 实验设备:PC机 二、设计任务 直流电动机的额定数据为220V,136A,1460r/min,4极, R=0.21 , a 22 GD=22.5N m;励磁电压为220V,励磁电流为1.5A。采用三相桥式全控整流电路。平波电抗器 L=200mH。 p 设计要求:设计并仿真该晶闸管-电动机(V-M)开环调速系统。观察电动机在全压起动和起动后加额定负载时电动机的转速、转矩和电流变化。 三、设计说明书的内容 1、设计题目与设计任务(设计任务书) 2、前言(绪论)(设计的目的、意义等) 3、主体设计部分 4、参考文献 5、结束语 四、设计时间与设计时间安排 1、设计时间:7月13日~7月24日 2、设计时间安排: 熟悉课题、收集资料:3天(7月13日~7月15日) 具体设计(含上机实验):6天(7月16日~7月21日) 编写课程设计说明书:2天(7月22日~7月23日) 答辩:1天(7月24日)
对转式永磁无刷直流电机的建模与仿真_李延升
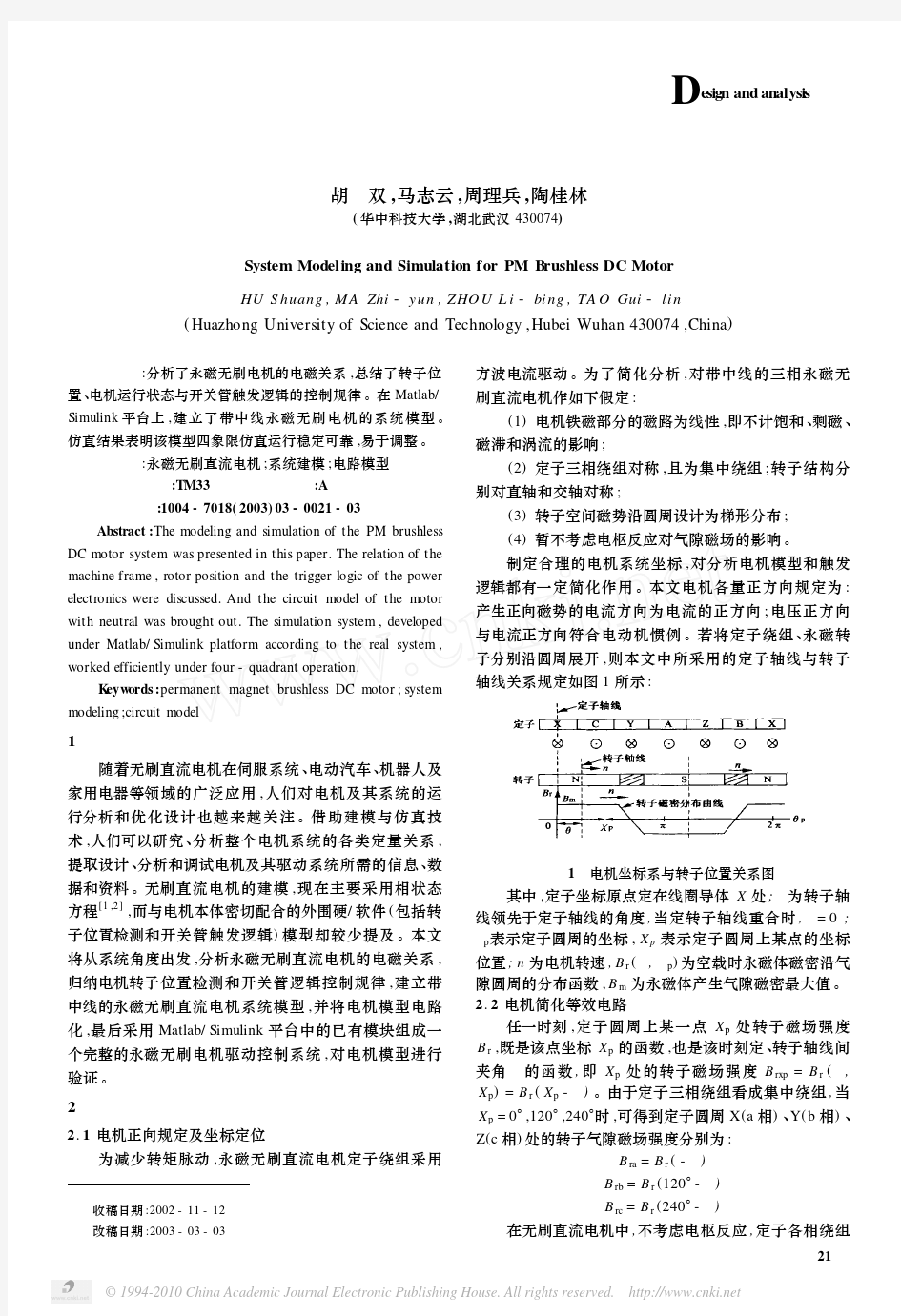
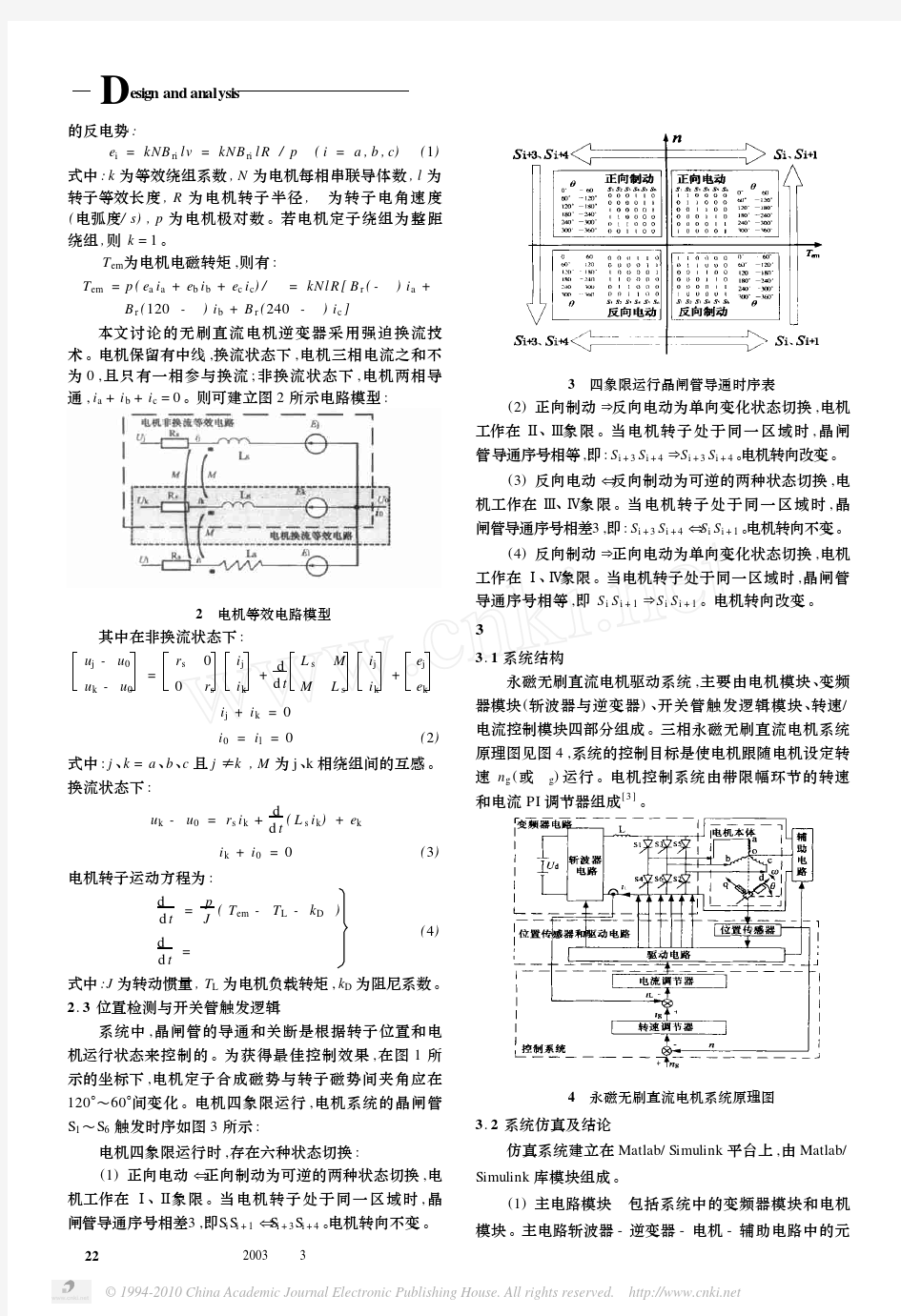
第44卷 2011年 第4期 4月 M ICR OM OTOR S V ol 44.N o 4 A pr 2011 收稿日期:2010-04-07 基金项目:西北工业大学研究生创业种子基金项目 作者简介:李延升(1983),男,博士研究生,研究方向为电机与电器。E-m a i:l liyanchao mm@yahoo .co https://www.360docs.net/doc/cd4617286.html, 窦满峰(1967),男,教授,博导,研究方向为电机与电器。 对转式永磁无刷直流电机的建模与仿真 李延升,窦满峰,雷金莉 (西北工业大学,西安 710072) 摘 要:该文根据对转式与普通永磁无刷直流电机区别,建立了对转永磁无刷直流电机的数学模型,采用M atlab /S i m u li nk 仿真软件建立了电机的仿真模型,并对电机带螺旋桨负载进行仿真分析。仿真结果表明:仿真波形与理论分析基本一致,验证该模型的有效性,为对转式永磁无刷直流电机的控制算法研究提供了工具。关键词:对转式;无刷直流电机;建模;仿真 中图分类号:TM 36+1 文献标志码:A 文章编号:1001-6848(2011)04-0019-04 M odeli ng and Si m ul ati on of the Contra -rotati ng BLDC M otor Control Syste m LI Yansheng ,DOU M anfeng ,LE I Jinli (N ort h w estern P oly technical University ,X i an 710072,China ) Abst ract :Contra -rotati n g per m anentm agnet br ush less DC m otor uses per m anentm agnet as the ou ter rotor , the ar m ature w inding as the i n ner rotor ,both inner and outer rotor i n teracts on the reverse ro tation by m eans of t h e m agne tic force .Based on the ana l y sis of the m athe m atica lm odel o f contra -rotating BLCDM,the mode l of BLDC M w as estab lished by the m odu lar design in M atlab /S i m ulink ,and the si m ulati o n experi m ent w as acco m p li s hed w ith a pr ope ller loads .The si m ulati o n resu lts are consistentw ith t h e theory analysis ,and the m ethod is va li d .The para m eter of th ism ethod is suitable for verif y ing the reasonability o f other contr o l algo -rit h m s and provides a ne w w ay fo r further research o f the con tra -rotati n g BLDC M.K ey w ords :contra -rotati n g ;BLCDM;m odeli n g ;si m u lati o n 0 引 言 对转式无刷直流电机直接驱动对转螺旋桨,在水下航行器中广泛应用 [1] 。它与普通永磁无刷直流 电机比较,除永磁体部分可以旋转,电枢部分也相对静止部分旋转,即电磁转矩驱动两个转子朝相反的方向旋转。以电枢部分为参照系来观察永磁体部分的旋转行为,可以发现对转式永磁无刷直流电机与普通的永磁无刷直流电动机的电流方程、电压平衡方程一致,数学模型中仅仅多了一个运动方程 [2] 。 根据这一思路,本文根据对转永磁无刷直流电机的数学模型,在S i m u li n k 软件中建立仿真模型,并对其进行仿真分析。 1 对转式BLDC M 数学模型 无刷直流电机的基本物理量有电磁转矩、电枢电流、反电动势和转速等 [3] ,这些物理量的计算与 电机的气隙磁场分布、绕组形式有十分密切的关系。 对于稀土永磁无刷直流电动机,其气隙磁场波形可以为方波也可以为正弦波或梯形波,这与选用电机的磁路结构和永磁体的形状有关。本文研究的对转式永磁无刷直流电机,其气隙磁场波形为方波,绕组中感应电动势为梯形波,采用方波电流驱动。在分析和仿真控制系统时,可直接利用电机原有的相变量来建立数学模型,既方便,又能获得准确结果。 假定永磁无刷直流电机工作在二相导通星形三相六状态下,工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称,那么三相绕组的电压平衡方程式为:U a U b U c =R 000R 000R i a i b i c +L -M 000L -M 00 L -M d i a d t d i b d t d i c d t +e a e b e c (1)
无刷直流电机的建模与仿真
龙源期刊网 https://www.360docs.net/doc/cd4617286.html, 无刷直流电机的建模与仿真 作者:秦超龙 来源:《电脑知识与技术》2013年第05期 摘要:该文在分析无刷直流电机(BLDCM)数学模型和工作原理的基础上,利用Matlab 软件的Simulink和PSB模块,搭建无刷直流电机及整个控制系统的仿真模型。该BLDCM控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪PWM,速度环采用PI控制。仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。 关键词:BLDCM控制系统;无刷直流电机;数学模型;MATLAB;电流滞环 中图分类号: TP391 文献标识码:A 文章编号:1009-3044(2013)05-1172-03 随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。 直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。 通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用Simulink中所提供的各种模块,构建出BLDCM控制系统的仿真模型,从而实现只利用Simulink中的模块建立BLDCM控制系统仿真模型。通过对实例电机的仿真,可以得到各类仿真波形,从而验证了仿真模型的有效性和正确性,数学模型的有效性及控制系统的合理性也得到了验证。 1 无刷直流电机的数学模型 本文采用两相导通三相六状态的无刷直流电动机来分析无刷直流电动机的数学模型[2-3]。 无刷直流电动机的感应电动势为梯形波,电流为方波。考虑到分析的方便、无刷直流电动机的特点,该文直接利用电动机本身的相变量建立物理模型,假定:
直流无刷电机硬件设计文档
硬件电路设计说明书V1 文档版本 1.0 编写人:彭威 编写时间:2015-06-10 部门:研发部 审核人: 审核时间:
1.引言 1.1编写目的 本文档是无刷直流电机风机盘管电源电路及控制驱动电路的硬件设计说明文档,它详细描述了整个硬件模块的设计原理,其主要目的是为无刷直流电机控制驱动电路的原理图设计提供依据,并作为 PCB 设计、软件驱动设计和上层应用软件设计的参考和设计指导。 1.2产品背景 1.3参考资料 Datasheet:Kinetis KE02 Datasheet:MKE02Z16VLC2 Datasheet:MKE02Z64M20SF0RM Datasheet:FSB50760SFT Datasheet:TNY266 Datasheet:FAN7527 2.硬件电路概述 2.1电源部分 电源部分主要功能是提供400V直流电供给电机,另外提供15V直流电给电机驱动芯片供电。采用反激式开关电源设计。 2.1.1总体方案
设计一款 100W驱动开关电源。给定电源具体参数如下: (1)输入电压:AC 85V~265V (2)输入频率:50Hz (3)工作温度:-20℃~+70℃ (4)输出电压/电流:400V/0.25A (5)转换效率:≧85% (6)功率因数:≧90% (7)输出电压精度:±5% 系统整体框架如下 如图所示为电源的整体架构框图,主要目的是在输入的85~265V、50Hz交流电下,输出稳定的恒压电机驱动直流电。由图可知,电源电路主要包括了前级保护电路模块、差模共模滤波模块、整流模块、功率因数校正模块、DC/DC模块。其中EMI滤波电路能够抑制自身和电源线产生的电磁污染,功率因数校正电路采用Boost有源功率因数
无刷直流电机数学模型(完整版)
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
直流电动机的MATLAB仿真..
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm');
hold on; R_c=0; for coef=1:;; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); hold on; U=U_N;R_c=; for R_c=0::; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('R=',num2str(R_c+R_a),'\Omega'); s_y=400*(4-R_c*; text(120,s_y,str);
基于自抗扰控制(ADRC)的无刷直流电机控制与仿真
一、研究意义 1.研究意义 由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。目前, 基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的P ID控制。PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后等特性, 很难用精确的数学模型描述, 这就使得基于精确数学模型的传统控制方法面临严重的挑战。另外, 经典P ID控制需要根据运行工况的不同而调节控制器参数, 无刷直流电机又具有数学模型复杂,非线性等特点,这给现场调试增加了难度。 2.国内外研究状况及发展 (1)无刷直流电机基本控制方法 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。 直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。它除了电机电枢、永磁励磁两部分外,还带有传感器。电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。 直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。 电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。换流器(inverter)一般由6个功率晶体管(V1~V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。电机驱动电路如图?所示。 图1 无刷直流电机的控制电路
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真 0引言 无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。 1无刷直流电机仿真模型 本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图 以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。 图2 无刷直流电机控制系统仿真模型框图 1.1电动机本体模块 在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,
i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。 图3 电机本体模块 1.反电势求取模块 本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
永磁无刷直流电动机的基本工作原理
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
无刷直流电机的数学模型
2.2 无刷直流电机的数学模型 在本文中,以两极三相无刷直流电机为例来说明其数学建立模型的过程。电机定子绕组为Y 型联接,转子采用内转子结构,3个霍尔元件在空间相互间隔120°对称放置。在此结构基础上,假设电机的磁路不饱和,不计涡流损耗、磁滞损耗及电枢反应;忽略齿槽效应;驱动系统中,整流逆变电路的功率管和续流二极管均为理想开关器件错误!未找到引用源。。 2.2.1 定子电压方程 由以上的假设条件,无刷直流电机每相绕组的相电压由电阻压降和绕组感应电势两部分组成,其定子电压平衡方程为 ???? ? ?????+????????????????????+????????????????????=??????????c b a c b a c cb ca bc b ba ac ab a c b a c b a c b a e e e i i i L L L L L L L L L dt d i i i R 0 0R 000R U U U (2-1) 式(2-1)中,a e 、b e 、c e 为各相定子反电动势,a i 、b i 、c i 为各相定子电流,a U , b U , c U 为定子各相电压,a R ,b R ,c R 为定子各相绕组电阻,a L ,b L ,c L 为定子各相绕组自感,ab L ,ac L ,ba L ,bc L ,ca L ,cb L 为定子间各相绕组的互感,由于无刷直流电机的转子为永磁体。假设无刷直流电机三相绕组对称,忽略磁阻间的影响,则可以认为定子各相绕组间互感为常数,即s c b a L L L L ===, R R R R c b a ===,M L L L L L L cb ca bc ba ac ab ======。则式(2-1)改写为 ???? ??????+????????????????? ???+????????????????????=??????????c b a c b a s s s c b a c b a e e e i i i L M M M L M M M L dt d i i i R 0 0R 000R U U U (2-2) 由0i i i c b a =++,0Mi Mi Mi c b a =++,代入式(2-2),整理可得 ?? ?? ??????+????????????????????+????????????????????=??????????c b a c b a c b a c b a e e e i i i L 000L 000L dt d i i i R 0 0R 000R U U U (2-3) 式(2-3)中M L L s -=。图2-3虚线框部分所示即为电子电枢部分等效电路。 2.2.2 反电势动方程 在物理学当中,在磁场中单根导体切割磁力线运动产生的电动势e 为 Blv e = (2-4) 其中,B 、l 分别为磁场强度和导体在磁场中运动有效长度,v 为导体在垂直于
三相无刷直流电机系统结构及工作原理
三相无刷直流电机系统结构及工作原理
图2.3 直流无刷电动机的原理框图位置传感器在直流无刷电动机中起着测定转子磁极位置的作用,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组换相。位置传感器种类较多,且各具特点。在直流无刷电动机中常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器【3】。 2.4基本工作原理 众所周知,一般的永磁式直流电动机的定子由永久磁钢组成,其主要的作用是在电动机气隙中产生磁场。其电枢绕组通电后产生反应磁场。其电枢绕组通电后产生反应磁场。由于电刷的换向作用,使得这两个磁场的方向在直流电动机运行的过程中始终保持相互垂直,从而产生最大转矩而驱动电动机不停地运转。直流无刷电动机为了实现无电刷换相,首先要求把一般直流电动机的电枢绕组放在定子上,把永磁磁钢放在转子上,这与传统直流永磁电动机的结构刚好相反。但仅这样做还是不行的,因为用一般直流电源给定子上各绕组供电,只能产生固定磁场,它不能与运动中转子磁钢所产生的永磁磁场相互作用,以产生单一方向的转矩来驱动转子转动。所以,直流无刷电动机除了由定子和转子组成电动机本体以外,还要由位置传感器、控制电路以及功率逻辑开关共同构成的换相装置,使得直流无刷电动机在运行过程中定子绕组所产生的的磁场和转动中的转子磁钢产生的永磁磁场,在空间始终保持在(π/2)rad左右的电角度。 2.5无刷直流电机参数 本系统采用的无刷电机参数 ·额定功率:100W ·额定电压:24V(DC) ·额定转速:3000r/min ·额定转矩:0.23N?m ·最大转矩:0.46N?m ·定位转矩:0.01N?m ·额定电流:4.0A
直流无刷电机本体设计解读
电机与拖动基础 课程设计报告 设计题目: 学号: 指导教师: 信息与电气工程学院 二零一六年七月
直流无刷电机本体设计 1. 设计任务 (1) 额定功率 80N P W = (2) 额定电压310N U V ≤ (3) 电动机运行时额定转速 1000/min N n r = (4) 发电机运行时空载转速max 6000/min n r = (5) 最大允许过载倍数 2.5λ= (6) 耐冲击能力21500/m a m s = (7) 机壳外径42D mm ≤ 设计内容: 1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。 2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。 3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。 2. 理论与计算过程 2.1 直流无刷电机的基本组成环节 直流无刷电动机的结构原理如图2-1-1所示。它主要由电机本体、位置传感器和电子开关线路三部分组成。电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。图中的电机本体为三相电机。三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。其原理框图如图2-1-2所示。
无刷直流电机控制系统的Proteus仿真
无刷直流电机控制系统的Proteus仿真-机械制造论文 无刷直流电机控制系统的Proteus仿真 王家豪潘玉民 (华北科技学院电子信息工程学院,河北三河101601) 【摘要】基于Proteus软件仿真平台,提出了一种对无刷直流电机(BLDCM)控制系统实现了转速闭环控制的方案。该系统以AT89S52单片机为核心,采用IR2101芯片驱动及AD1674实现速度,并利用数码动态显示转速,通过增量式PID调节对无刷直流电机实现转速闭环稳定控制。仿真结果表明该系统具有可控调速、显示直观等特点。 关键词无刷直流电机(BLDCM);Proteus;增量式PID;闭环控制 0引言 无刷直流电机(BLDCM)既有直流有刷电机的特性,又有交流电机无刷的优点,在快速性、可控性、可靠性、输出转矩、结构、耐受环境和经济性等方面具有明显的优势,近年来得到迅速推广[1]。BLDCM是一种用电子换向取代机械换向的新一代电动机,与传统的直流电动机相比,它具有过载能力强,低电压特性好,启动电流小等优点。近年来在工业运用方面大有取代传统直流电动机的趋势,所以研究无刷直流电机的驱动控制技术具有重要的实际应用价值。 本设计采用增量式PID控制策略控制无刷电动机,并在Proteus平台上进行转速闭环系统仿真。搭建了无刷直流电动机转速控制系统的仿真模型,基于80C51控制核心,采用keil C51软件编写C程序。 1系统硬件组成 控制系统的硬件组成如图1所示。采用Atmel公司的AT89S52单片机为系统
控制核心、IR2101驱动的MOSFET三相桥式逆变器、无刷直流电机、A/D转换转速检测、闭环PID控制、按键检测、档位和转速显示等部分组成。 2控制系统核心及外围电路 系统核心AT89S52单片机最小系统及按键电路如图2所示。 AT89S52芯片是8位单片机,具有廉价、实用及运算快等优点,它有两个定时器,两个外部中断接口,24个I/O口,一个串行口。 单片机首先进行初始化,将显示部分(转速显示、档位显示)送显“0”然后通过中断对按键进行检测当检测到启动键按下时,系统启动,控制核心输出初始控制码,与此同时通过AD转换器读取当前的实时转速,一方面用于显示,另一方面将当前转速与设定转速送入PID控制环节然后输出下一时刻的控制码。 在本次设计中使用80C51的外部中断接口0(INT0)作按键检测(见图3),通过四个与门,当有任何一个按键按下去时tap端都会出现低电平引发中断。
无刷直流电机软件的设计
4.3 控制器软件设计 软件设计是控制系统最重要的一个组成部分,软件设计的好坏直接关系着整个控制系统性能的优良,控制系统的软件设计一定要具备实时性、可靠性和易维护性,对此,选择一款简单、方便的开发环境对于系统软件的整体优化以及提高整个系统的开发效率有很大的影响。目前支持STM 32系列控制芯片且应用比较广泛的主要有IAR EWARM和KEIL MDK这两个集成开发环境,本文采用的开发环境是KEIL MDK,它是ARM 公司推出的嵌入式微控制器开发软件,集成了业界领先的Vision 4开发平台,具有良好的性能,是ARM开发工具中的最好的选择,适合于不同层次的开发人员使用,尤其是它与我们经常使用的51单片机开发环境Keil C51的整体布局和使用方法类似,只有一些地方不同,操作起来比较熟练,很容易上手,极大的减小了开发人员的使用难度,缩短了开发周期,提高了开发效率,因此这款KEIL MDK得到了很多人的认可。 STM 32的软件开发主要开发方式有2种,就是基于寄存器的开发和基于库函数的开发,其中基于寄存器的开发方式就更51单片机的开发差不多,它是通过直接操作芯片内部的各个寄存器来达到控制芯片的目地,这种方式较直观,程序运行占用的资源少,但对于STM 32这种寄存器数目非常多的芯片来说,采用寄存器的开发方式会减慢开发速度,还让程序可读性降低。而基于库函数的开发方式则是对寄存器的封装,它向下处理与寄存器直接相关的配置,向上为用户提供配置寄存器的接口,这种方式大大降低了使用STM 32的条件,不仅提高了开发效率,而且程序还具有很好的可读性和移植性,因此本文采用的是基于库函数的开发方式,编程语言全采用 C 语言。
直流电机起动仿真
5.2 基于MATLAB的电机起动仿真 在上节直流电机参数测试的基础上,本节作了基于MATLAB/Simulink的直流电机起动仿真研究[46-47],得到了电机起动过程中的电动机电流、电动机角速度、电枢电压和电磁转矩波形并分析了其仿真结果,为实物测试提供了简便经济的预测和验证。 5.2.1 电机起动仿真模型的建立 自MATLAB从5.3版本中新增进了电力系统工具箱(Power System Blockset)发展至今,MATLAB在电力系统仿真中的应用越来越广泛。电力系统工具箱是一个基于图形编程的电力系统仿真工具箱。主要是由加拿大的HydroQuebec和International公司共同开发的,其功能非常强大,可以用于电路、电力电子系统、电机系统、电力传输等过程的仿真,它提供了一种类似电路建模的方式进行模型绘制,使用者不需要自己编程而只需将仿真的电力系统图搭建在工作窗口中,MATLAB自动将其变化成状态方程描述的系统形式,便可以在SIMULINK下进行仿真研究了。 图5.4 电机起动仿真模型 电力系统工具箱包含的模块有:Electrical Sources(电源库)、Elements(元件库)、Power Electronics(电力电子元件库)、Machines(电机库)、Connectors (连接器库)、Measurements(测量仪器库)、Extra Library(附加元件库)、Demos (示例库)、Powergui(图形用户界面graphical user interface),在此基于MATLAB 对电机起动进行SIMULINK仿真。 搭建的电机起动仿真模型主要由直流电压源(DC V oltage Source)、理想开关(Ideal Switch)、电机起动器(Motor Starter)、直流电机(DC machine)、串联RLC支路(Series RLC Branch)、电压表(V oltage Measurement)、信号分解模块(Demux)和示波器(Scope)等模块构成。仿真模型如图5.4所示。 仿真系统中励磁电压Ef由一个直流电压源提供,电枢绕组电动势E由另一个直流电压源经一个由计时器(Timer)控制的理想开关(Ideal Switch)提供。采用电枢回路串电阻三级起动,电机起动器由搭建并封装的子系统(Motor
无刷直流电机的组成及工作原理
无刷直流电机的组成及工作原理 2.1 引言 直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。下文从无刷直流电动机的三个部分对其发展进行分析。 2.2 无刷直流电机的组成 2.2.1 电动机本体 无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB)。钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。 目前,为提高电动机的功率密度,出现了横向磁场永磁电机,其定子齿槽与电枢线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。该类型电机正处于研究开发阶段。 2.2.2 电子换相电路 控制电路:无刷直流电动机通过控制驱动电路中的功率开关器件,来控制电机的转速、转向、转矩以及保护电机,包括过流、过压、过热等保护。控制电路最初采用模拟电路,控制比较简单。如果将电路数字化,许多硬件工作可以直接由软件完成,可以减少硬件电路,提高其可靠性,同时可以提高控制电路抗干扰的能力,因而控制电路由模拟电路发展到数字电路。 驱动电路:驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路由大功率开关器件组成。正是由于晶闸管的出现,直流电动机才从有刷实现到无刷的飞跃。但由于晶闸管是只具备控制接通,而无自关断能力的半控性开关器件,其开关频率较低,不能满足无刷直流电动机性能的进一步提高。随着电力电子技术的飞速发展,出现了全控型的功率开关器件,其中有可关断晶体管(GTO)、电力场效应晶体管(MOSFET)、金属栅双极性晶体管IGBT 模块、集成门极换流晶闸管(IGCT)及近年新开发的电子注入增强栅晶体管(IEGT)。随着这些功率器件性能的不断提高,相应的无刷电动机的驱动电路也获得了飞速发展。目前,全控型开关器件正在逐渐取代线路复杂、体积庞大、功能指标低的普通晶闸管,驱动电路已从线性放大状态转换为脉宽调制的开关状态,相应的电路组成也由功率管分立电路转成模块化集成电路,为驱动电路实现智能化、高频化、小型化创造了条件。 2.2.3 转子位置检测电路
无刷直流电机控制系统的设计
1引言无刷直流电机最本质的特征是没有机械换向器和电刷所构成的机械接触式换向机构。现在,无刷直流电机定义有俩种:一种是方波/梯形波直流电机才可以被称为无刷直流电机,而正弦波直流电机则被认为是永磁同步电机。另一种是方波/梯形波直流电机和正弦波直流电机都是无刷直流电机。国际电器制造业协会在1987年将无刷直流电机定义为“一种转子为永磁体,带转子位置信号,通过电子换相控制的自同步旋转电机”,其换相电路可以是独立的或集成于电机本体上的。本次设计采用第一种定义,把具有方波/梯形波无刷直流电机称为无刷直流电机。从20世纪90年代开始,由于人们生活水平的不断提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都向着高效率化、小型化及高智能化发展,电机作为设备的重要组成部分,必须具有精度高、速度快、效率高等优点,因此无刷直流电机的应用也发展迅速[1]。 1.1 无刷直流电机的发展概况 无刷直流电动机是由有刷直流电动机的基础上发展过来的。 19世纪40年代,第一台直流电动机研制成功,经过70多年不断的发展,直流电机进入成熟阶段,并且运用广泛。 1955年,美国的D.Harrison申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,形成了现代无刷直流电动机的雏形。 在20世纪60年代初,霍尔元件等位置传感器和电子换向线路的发现,标志着真正的无刷直流电机的出现。 20世纪70年代初,德国人Blaschke提出矢量控制理论,无刷直流电机的性能控制水平得到进一步的提高,极大地推动了电机在高性能领域的应用。 1987年,在北京举办的德国金属加工设备展览会上,西门子和博世两公司展出了永磁自同步伺服系统和驱动器,引起了我国有关学者的注意,自此我国开始了研制和开发电机控制系统和驱动的热潮。目前,我国无刷直流电机的系列产品越来越多,形成了生产规模。 无刷直流电动机的发展主要取决于电子电力技术的发展,无刷直流电机发展的初期,由于大功率开关器件的发展处于初级阶段,性能差,价格贵,而且受永磁材料和驱动控制技术的约束,这让无刷直流电动机问世以后的很长一段时间内,都停
无刷直流电机控制系统的设计及仿真毕业设计
目录 1 前言 (1) 1.1 无刷直流电机的发展 (1) 1.2 无刷直流电机的优越性 (1) 1.3 无刷直流电机的应用 (2) 1.4 无刷直流电机调速系统的研究现状和未来发展 (2) 2 无刷直流电机的原理 (4) 2.1 三相无刷直流电动机的基本组成 (4) 2.2 无刷直流电机的基本工作过程 (5) 2.3 无刷直流电动机本体 (6) 2.3.1 电动机定子 (6) 2.3.2 电动机转子 (7) 2.3.3 有关电机本体设计的问题 (8) 3 转子位置检测 (9) 3.1 位置传感器检测法 (9) 3.2 无位置传感器检测法 (10) 4 系统方案设计 (12) 4.1 系统设计要求 (12) 4.1.1 系统总体框架 (12) 4.2 主电路供电方案选择 (13) 4.3 无刷直流电机电子换相器 (14)
4.3.1 三相半控电路 (14) 4.3.2 三相全控电路 (15) 4.4 无刷直流电机的基本方程 (16) 4.5 逆变电路的选择 (19) 4.6 基于MC33035的无刷直流电动机调速系统 (19) 4.6.1 MC33035无刷直流电动机控制芯片 (19) 4.6.2 基于MC33035的无刷直流电动机调速系统设计 (21) 5 无刷直流电机调速系统的MATLAB仿真 (23) 5.1 电源、逆变桥和无刷直流电机模型 (24) 5.2 换相逻辑控制模块 (25) 5.3 PWM调制技术 (30) 5.3.1 等脉宽PWM法 (32) 5.3.2 SPWM(Sinusoidal PWM)法 (32) 5.4 控制器和控制电平转换及PWM发生环节设计 (32) 5.5 系统的仿真、仿真结果的输出及结果分析 (34) 5.5.1 起动,阶跃负载仿真 (34) 5.5.2 可逆调速仿真 (36) 6 总结和体会 (38)