一种高速磁浮列车定位传感器的标定工具
2008年第27卷第5期 传感器与微系统(Transducer and Microsystem Technologies)
一种高速磁浮列车定位传感器的标定工具3
李 璐,赵宏涛,周文武,吴 峻
(国防科技大学机电工程与自动化学院,湖南长沙410073)
摘 要:高速磁浮列车定位传感器的标定需要确定传感器输出电压对应水平位移和垂直间隙2个变量的二维表,数据量大。介绍了一种采用RS—485接口传输信号的标定工具,叙述了计算机控制下步进电机带动标定台二自由度移动的自动标定过程。实验结果证明了该工具的可行性。
关键词:磁浮列车;定位传感器;标定;步进电机
中图分类号:TP212 文献标识码:A 文章编号:1000-9787(2008)05-0021-03
C alibration tool for position detection sensor
of high speed maglev train3
L I L u,ZHAO Hong2tao,ZHOU Wen2wu,WU J un
(College of Mechatronics E ngineering and Autom ation,N ational U niversity of
Defense T echnology,Changsh a410073,China)
Abstract:22D sheet of two variables of output voltage vs horizontal displacement and vertical gap needs to be given when a position detection sensor of high speed maglev train is calibrated.A great number of data is involved.A calibration tool with RS—485interface is presented.The platform of this tool is horizontally and vertically moved by two stepping motors.The calibration can be automatically accomplished under the control of a computer.The experiment result testifies the validity of this calibration tool.
K ey w ords:maglev train;position detection sensor;calibration;stepping motor
0 引 言
在常导高速磁浮列车系统中,为了保证直线同步电机的同步运行,必须实现无接触条件下列车与长定子轨道间相对位置的高精度定位[1],这一任务是由电感式定位传感器[2]来完成的。和其他类型的传感器一样,电感式定位传感器的输入量与输出量之间的关系需要精确标定。本文介绍了一种定位传感器的标定工具,该工具由PC机主控,利用水平和垂直2个方向的步进电机驱动标定台扫描长定子轨道,自动生成了代表定位传感器输入量与输出量之间关系的二维表。
定位传感器只装于磁浮列车的车头和车尾,其信号要经过很长的信道、复杂的电磁环境后才能到达牵引控制单元。RS—485接口能有效克服共模干扰、抑制线路噪声,传输距离可长达1.2km,最高数据传输速率可达10Mbps[3]。所以,定位传感器采用RS—485接口传输信号,标定工具也要与之匹配。本文简要叙述了采用RS—485接口后发送端与接收端的数据同步方式。1 定位与标定原理
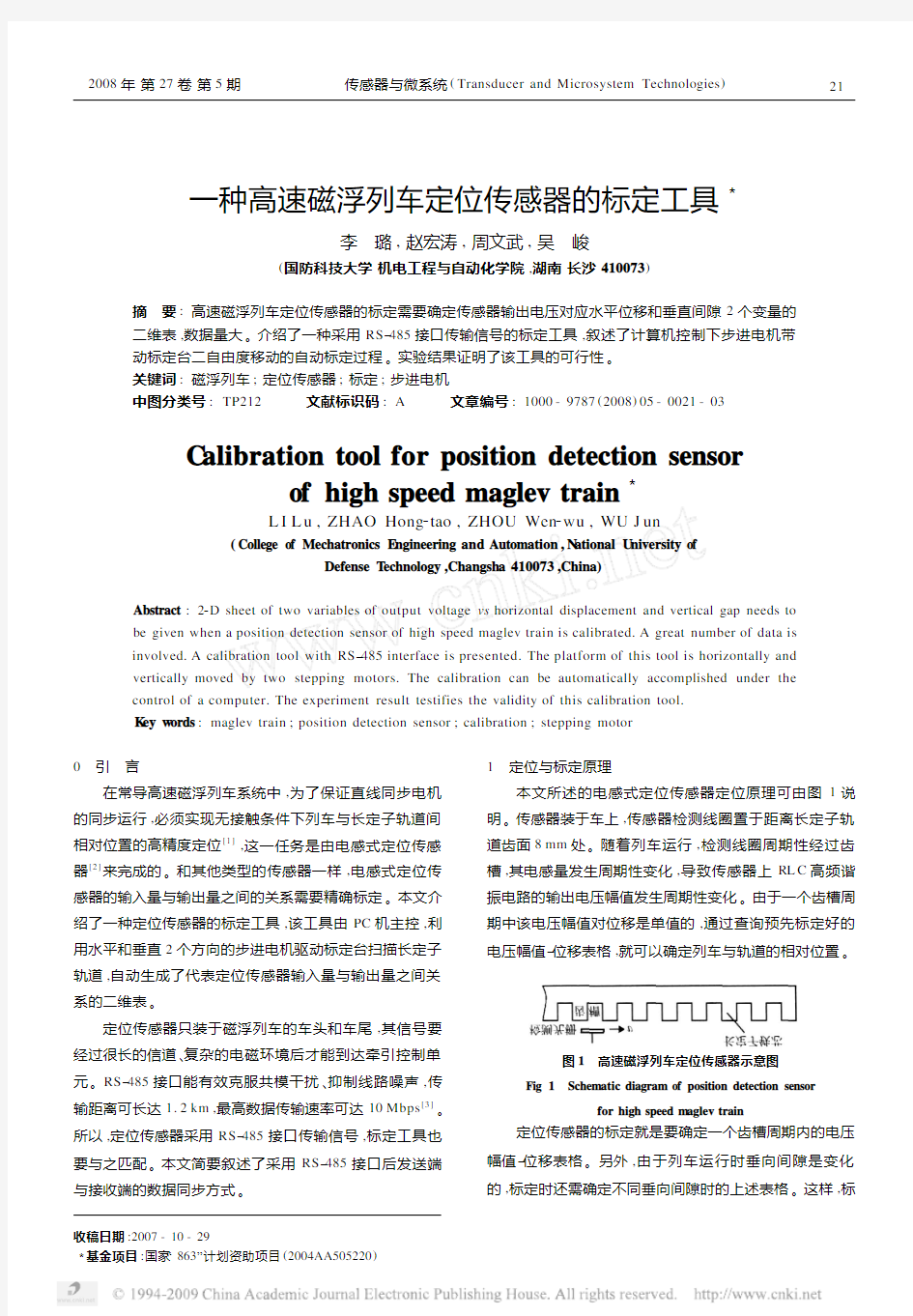
本文所述的电感式定位传感器定位原理可由图1说明。传感器装于车上,传感器检测线圈置于距离长定子轨道齿面8mm处。随着列车运行,检测线圈周期性经过齿槽,其电感量发生周期性变化,导致传感器上RL C高频谐振电路的输出电压幅值发生周期性变化。由于一个齿槽周期中该电压幅值对位移是单值的,通过查询预先标定好的电压幅值—位移表格,就可以确定列车与轨道的相对位置。
图1 高速磁浮列车定位传感器示意图
Fig1 Schem atic diagram of position detection sensor
for high speed m aglev train
定位传感器的标定就是要确定一个齿槽周期内的电压幅值—位移表格。另外,由于列车运行时垂向间隙是变化的,标定时还需确定不同垂向间隙时的上述表格。这样,标
收稿日期:2007-10-29
3基金项目:国家“863”计划资助项目(2004AA505220)
12
传感器与微系统 第27卷定结果最终形成一个电压对应水平位移、垂向间隙的二维表。
2 标定工具的硬件组成
2.1 硬件组成
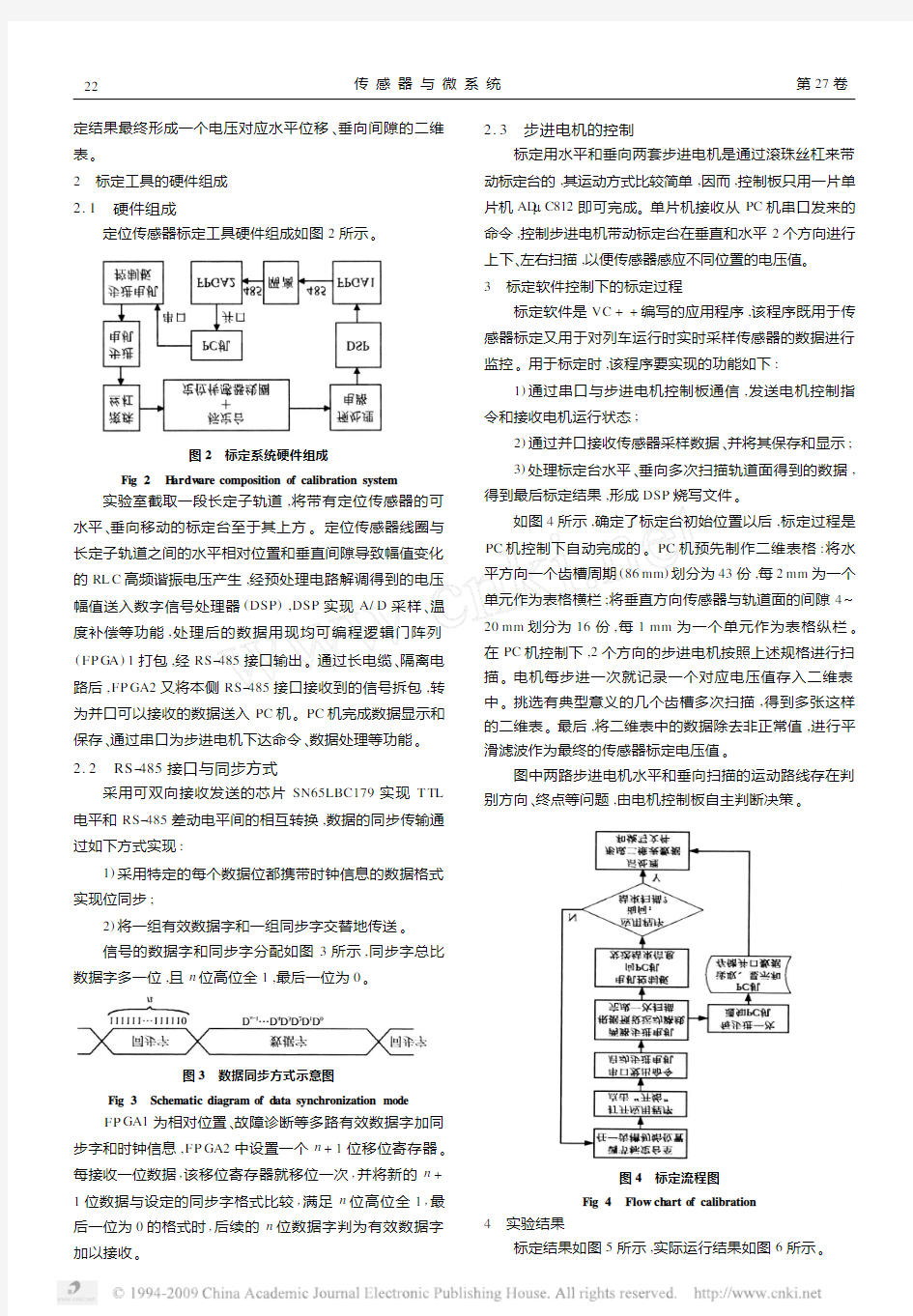
定位传感器标定工具硬件组成如图2所示
。
图2 标定系统硬件组成
Fig 2 H ardw are composition of calibration system
实验室截取一段长定子轨道,将带有定位传感器的可水平、垂向移动的标定台至于其上方。定位传感器线圈与长定子轨道之间的水平相对位置和垂直间隙导致幅值变化的RL C 高频谐振电压产生,经预处理电路解调得到的电压幅值送入数字信号处理器(DSP ),DSP 实现A/D 采样、温度补偿等功能,处理后的数据用现均可编程逻辑门阵列
(FP GA )1打包,经RS —485接口输出。通过长电缆、隔离电
路后,FP GA2又将本侧RS —485接口接收到的信号拆包,转为并口可以接收的数据送入PC 机。PC 机完成数据显示和保存、通过串口为步进电机下达命令、数据处理等功能。
2.2 RS —485接口与同步方式
采用可双向接收发送的芯片SN65LBC179实现T TL 电平和RS —485差动电平间的相互转换,数据的同步传输通过如下方式实现:
1)采用特定的每个数据位都携带时钟信息的数据格式
实现位同步;
2)将一组有效数据字和一组同步字交替地传送。
信号的数据字和同步字分配如图3所示,同步字总比数据字多一位,且n 位高位全1,最后一位为0
。
图3 数据同步方式示意图
Fig 3 Schem atic diagram of d ata synchronization mode
FP GA1为相对位置、故障诊断等多路有效数据字加同步字和时钟信息,FP GA2中设置一个n +1位移位寄存器。每接收一位数据,该移位寄存器就移位一次,并将新的n +
1位数据与设定的同步字格式比较,满足n 位高位全1,最
后一位为0的格式时,后续的n 位数据字判为有效数据字加以接收。
2.3 步进电机的控制
标定用水平和垂向两套步进电机是通过滚珠丝杠来带动标定台的,其运动方式比较简单,因而,控制板只用一片单片机AD
μC812即可完成。单片机接收从PC 机串口发来的命令,控制步进电机带动标定台在垂直和水平2个方向进行上下、左右扫描,以便传感器感应不同位置的电压值。
3 标定软件控制下的标定过程
标定软件是VC ++编写的应用程序,该程序既用于传感器标定又用于对列车运行时实时采样传感器的数据进行监控。用于标定时,该程序要实现的功能如下:
1)通过串口与步进电机控制板通信,发送电机控制指
令和接收电机运行状态;
2)通过并口接收传感器采样数据、并将其保存和显示;3)处理标定台水平、垂向多次扫描轨道面得到的数据,
得到最后标定结果,形成DSP 烧写文件。
如图4所示,确定了标定台初始位置以后,标定过程是
PC 机控制下自动完成的。PC 机预先制作二维表格:将水
平方向一个齿槽周期(86mm )划分为43份,每2mm 为一个单元作为表格横栏;将垂直方向传感器与轨道面的间隙4~
20mm 划分为16份,每1mm 为一个单元作为表格纵栏。
在PC 机控制下,2个方向的步进电机按照上述规格进行扫描。电机每步进一次就记录一个对应电压值存入二维表中。挑选有典型意义的几个齿槽多次扫描,得到多张这样的二维表。最后,将二维表中的数据除去非正常值,进行平滑滤波作为最终的传感器标定电压值。
图中两路步进电机水平和垂向扫描的运动路线存在判别方向、终点等问题,由电机控制板自主判断决策
。
图4 标定流程图
Fig 4 Flow ch art of calibration
4 实验结果
标定结果如图5所示,实际运行结果如图6所示。
2
2
第5期 李 璐,等:一种高速磁浮列车定位传感器的标定工具
由图5可见,间隙固定时,标定电压对水平位移近似成正弦函数变化;间隙越大,同一水平位置标定电压越小。以上结果均符合预期值。
图6中的相对位置值已转换为相位值,由于是三相单匝绕组,所以,一个齿槽周期代表60°。可以看到,定位传感器通过查阅标定过的二维表,结合一些实时处理程序,无论列车匀速运动还是加速运动时都能提供足够精确的相对位置信息。
5 结 论
本文介绍了一种采用RS—485接口传输信号,可在计算机控制下自动完成标定过程的高速磁浮列车定位传感器标定工具。标定过程的自动化大大减少了人的工作量,为设计高精度高可靠性定位传感器奠定了基础。所设计的传感器已成功应用于某型高速实验车上,可以在各种情况下为牵引控制系统提供准确的列车—轨道相位信息。
参考文献:
[1] 李 璐,吴 峻.高速磁悬浮列车定位传感器的研究设计[J].
传感技术学报,2007,20(7):1510-1513.
[2] 吴 峻,李 璐,樊树江,等.一种间隙传感器的线圈设计[J].传
感技术学报,2004,17(3):512-515.
[3] 余 晔,王仲东,黄 剑.485总线在微机监控系统中的应用[J].
武汉理工大学学报,2003,25(1):69-72.
作者简介:
李 璐(1977-),男,陕西西安人,博士研究生,研究方向为磁悬浮控制和电涡流传感器。
(上接第20页)
锁定放大的相敏解调采用模拟乘法解调方案,电路主要包含模拟乘法器和有源低通滤波器两部分。综合考虑,模拟乘法器选用四象限乘法/除法器芯片AD734,其工作频率可达10M Hz,在10Hz~10M Hz带宽内,信噪比达到70dB。有源低通滤波器设计选用了MAXIM公司的集成连续时间滤波器MAX275搭建四阶低通电路,具有噪声小、动态特性优良等优点。
3.3 后置级放大与比较输出
采用仪表放大器AD620对滤波后的信号进行后置级放大,便于后续电路处理。为直观反映转数情况,本仿真采用比较器比较输出,计数器计数在10ms内计数值为9,与理论值10基本一致,这是因为滤波后波形出现了一定的延迟,由计数值可以推算转子的转数。在实际电路中,比较输出的方波采用DSP捕获处理,从而可以得到转子的转数和位置信息,并可根据测得的数据与设定值相比较,输出一定控制逻辑,驱动后续反馈电路,实现转子稳定旋转的闭环控制。
4 结束语
本文主要介绍采用互相关检测与锁定放大解调相结合检测微小差分电容信号的方法,同时,采用DSP控制DDS 产生调制解调所需的载波与参考正弦波,并给出DSP算法的主要内容,最后,通过系统仿真验证了方案的可行性,对实际电路参数和其他类似的悬浮转子式结构的电容信号检测具有参考意义。
参考文献:
[1] 施进浩,陈 宝.微机电系统中微电机的发展趋暖[J].世界
产品与技术,2003(12):42-45.
[2] 张文明,孟 光,周健斌.静电微电机及其可靠性分析[J].机
械强度,2005,27(1):50-56.
[3] 江国舟,江 超.微弱信号检测的基本原理与方法研究[J].
湖北师范学院学报:自然科学版,2001,21(4):45-48.
[4] 刘 武,黄晓刚,邵诗逸,等.磁悬浮转子微陀螺的电容检测
系统分析和实现[J].测控技术,2006,25(1):1-4.
[5] 刘 俊,张斌珍.微弱信号检测技术[M].北京:电子工业出
版社,2005:75-90,123-132.
[6] TN1000:What is a lock2in amplifier?[J/OL].[2007-07-31].
http:∥https://www.360docs.net/doc/d716012170.html,.
[7] 苏奎峰,吕 强,耿庆锋,等.TMS320F2812原理与开发
[M].北京:电子工业出版社,2005:124-156.
作者简介:
张忠榕(1982-),男,福建永泰人,硕士研究生,研究方向为微机电系统的信号检测与控制。
32
压力传感器标定与校准
压力传感器检定: 1. 静态检定 2. 动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的 主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般 我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为 其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样 的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快 速变化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很 好地追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态 误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。 压力传感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来 描述。 线性度eL (非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的 吻合 程度; A x )00% y^s 重复性eR :正行程或反行程曲线多次测量时曲线的一致程度; 置信系数 a=2( 95.4%)或 a=3( 99.73%) 迟滞eH 正行程与反行程之间的曲线的不重合度;
dp =± _ % 线性度、迟滞反映 系统误差;重复性反映 偶然误差 根据检定规程一 《压力传感器静态》, 在校准精密 线性压力传 感器时给出 的校准曲 线有二种最小二乘直线和端点平移线。 动态检定: 1. 瞬态激励法(阶跃信号激励) 2. 正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时 间、过冲量、灵敏度。 正弦激励法:正弦压力信号输入法是一种间接的检定方法,即被检定的压力传感器和 一个“参考”压力传感器相比较,而“参考”压力传感器具有理想的动态性能。正弦 压力激励法在高 频、高压时,正弦信号往往严重畸变。因此一般只能用于小压力或低 频围的检定。 xlOO% 贝塞尔公式 误差(三者反应系统总误 差)
磁悬浮列车主要由悬浮系统
磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,见图3。尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。下面分别对这三部分所采用的技术进行介绍。 悬浮系统:目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。图4给出了两种系统的结构差别。 电磁悬浮系统(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互吸引产生悬浮。常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁吸力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。 电力悬浮系统(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。EDS系统在低温超导技术下得到了更大的发展。 超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
磁浮列车原理
磁浮列车原理principle of maglev 1.磁浮列车是一个系统。在该系统中,车辆利用车载超导磁铁和地面线圈之间产生的电磁 吸力或斥力从导轨(相当于传统铁路的轨道)上浮升起来。 Maglev is a system in which the vehicle runs levitated from the guideway (corresponding to the rail tracks of conventional railways) by using electromagnetic forces between superconducting magnets on board the vehicle and coils on the ground. 2.与传统的轮轨铁路不同,磁浮列车主要是依靠无接触的电磁力、而非机械力来实现支承、 导向、加速和制动功能。 Different from conventional wheel-on-rail system, the Transrapid accomplishes the functions of support, guidance, acceleration and braking by using non-contact electromagnetic instead of mechanical force. 3.由于列车运行中几乎没有机械接触,因而运行起来噪声较小,时速却可高达500公里。 Because there is almost no mechanical contact Transrapid can run with lower noise, but relatively higher speed up to 500 km/h. 4.磁悬浮系统依靠列车上的电磁铁和导轨中的磁铁定子之间的吸力工作。 The magnetic levitation system is based on the power of attraction between the electromagnets in the vehicle and the ferromagnetic stator packs in the guideway. 5.跟传统列车不同,磁浮列车的驱动系统不安装在车辆上,而是在导向轨中。 In contrast to the conventional trains, the propulsion system for the Transrapid is not mounted in the vehicle but in the guideway. 6.导轨上的长定子线性电机被分成区段,各区段均有独立开关,只有列车通过该区段时才 有电力供应。 The long-stator linear motor in the guideway is divided into segments which are individually switched on and off, with power only being supplied to the given segments as the train passes. 7.电子控制的磁浮磁铁贯穿车辆的两侧,这些磁铁使车辆被吸往安装在导轨下放的磁铁定 子元件。 Electronically controlled support magnets located on both sides along the entire length of the vehicle pull up to the ferromagnetic stator packs mounted to the underside of the guideway. 8.贯穿车辆两侧的导轨磁铁使车辆水平悬浮在轨道上。 Guidance magnets located on both sides along the entire length of the vehicle keep the vehicle laterally on the track. 9.电子系统可确保空隙恒定(即10毫米)。 Electronic systems guarantee that the clearance remains constant (nominally 10 mm). 10.列车浮升所需功量低于车辆空调设施所需。 To hover, the maglev requires less power than its air conditioning equipment. 11.悬浮系统由车载电池馈电,因而与驱动系统无关。 The levitation system is supplied from on-board batteries and thus independent of the propulsion system. 12.在没有外部能量输入的情况下,车辆也能悬浮达30分钟之久。而在运行过程中,车载 电池可由配备于悬浮磁铁中的线性发电机充电。 The vehicle is capable of hovering up to 30 minutes without external energy. While travelling, the on-board batteries are recharged by linear generators integrated into the support
压力传感器动态标定
压力传感器的动态标定 一、实验目的: 1、熟悉记忆示波器和电荷放大器使用方法; 2、用标定激波管标定传感器的动态参数; 3、计算传感器幅频特性和相频特性。 三、测试仪器设备: 1、记忆示波器1台(TDS210); 2、CY-YD-205 1只,标定对象; 3、电荷放大器YE5850一台,连接石英压力传感器; 4、压电陶瓷传感器CY-YD-203T 1只; 5、电荷放大器KD5002 一台,连接压电陶瓷传感器,用于激波速度测量。 三、实验步骤: ( 1 ) 把石英传感器安装在激波管端壁上,并将石英传感器电缆接到电荷放大器YE5820的输入端,将YE5820的输出端电缆接到示波器ch2的输入端,并且将其上限频率置于100kHZ.灵敏度设在10pc/unit。打开YE5820电荷放大器(开关在背面),“工作/复位”开关置于“复位”位置。 ( 2 ) 把侧壁的压电陶瓷传感器接到电荷放大器KD5002的输入端,并将放大器KD5002的输出接到示波器1通道。将放大器的上限截至频率设在100kHZ,示波器ch1垂直标尺置于500mv/div,ch2的垂直标尺置于20mv/div。 采样频率的设定:考虑到传感器的固有频率约为120kHz,由Shannon 采样定律,F s≥ 2F i,取F s=500kS/s,即cm。也就是说水平标尺调节到500微妙/div为宜。 触发信源选ch1,上升沿单次触发,触发电平可调大一些,几十mv不成问题. ( 3 ) 激波管安装膜片,给气压机充气在4bar左右后,打开压气机阀门,将放大器置于“工作”,示波器”Ready”后, 打开激波管充气阀门,破膜,记录
传感器的标定与校准
标定与校准的概念 新研制或生产的传感器需要对其技术性能进行全面的检定,以确定其基本的静、动态特性,包括灵敏度、重复性、非线性、迟滞、精度及固有频率等。 例如,对于一个压电式压力传感器,在受力后将输出电荷信号,即压力信号经传感器转换为电荷信号。但是,究竟多大压力能使传感器产生多少电荷呢?换句话说,我们测出了一定大小的电荷信号,但它所表示的加在传感器上的压力是多大呢? 这个问题只靠传感器本身是无法确定的,必须依靠专用的标准设备来确定传感器的输入――输出转换关系,这个过程就称为标定。简单地说,利用标准器具对传感器进行标度的过程称为标定。具体到压电式压力传感器来说,我们用专用的标定设备,如活塞式压力计,产生一个大小已知的标准力,作用在传感器上,传感器将输出一个相应的电荷信号,这时,再用精度已知的标准检测设备测量这个电荷信号,得到电荷信号的大小,由此得到一组输入――输出关系,这样的一系列过程就是对压电式压力传感器的标定过程,如图1-19所示。 图1-19 压电式压力传感器输入――输出关系 校准在某种程度上说也是一种标定,它是指传感器在经过一段时间储存或使用后,需要对其进行复测,以检测传感器的基本性能是否发生变化,判断它是否可以继续使用。因此,校准是指传感器在使用中或存储后进行的性能复测。在校准过程中,传感器的某些指标发生了变化,应对其进行修正。 标定与校准在本质上是相同的,校准实际上就是再次的标定,因此,下面都以标定为例作介绍。 1.7.2 标定的基本方法 标定的基本方法是,利用标准设备产生已知的非电量(如标准力、位移、压力等),作为输入量输入到待标定的传感器,然后将得到的传感器的输出量与输入的标准量作比较,从而得到一系列的标定数据或曲线。例如,上述的压电式压力传感器,利用标准设备产生已知大小的标准压力,输入传感器后,得到相应的输出信号,这样就可以得到其标定曲线,根据标定曲线确定拟合直线,可作为测量的依据,如图1-20所示。
常用传感器的工作原理及应用
常用传感器的工作原理及应用
3.1.1电阻式传感器的工作原理 应变:物体在外部压力或拉力作用下发生形变的现象 弹性应变:当外力去除后,物体能够完全恢复其尺寸和形状的应变 弹性元件:具有弹性应变特性的物体 3.1.3电阻应变式传感器 电阻应变式传感器利用电阻应变片将应变转换为电阻值变化的传感器。 工作原理:当被测物理量作用于弹性元件上,弹性元件在力、力矩或压力等的作用下发生变形,产生相应的应变或位移,然后传递给与之相连的应变片,引起应变片的电阻值变化,通过测量电路变成电量输出。输出的电量大小反映被测量的大小。 结构:应变式传感器由弹性元件上粘贴电阻应变片构成。 应用:广泛用于力、力矩、压力、加速度、重量等参数的测量。 1.电阻应变效应 ○
电阻应变片的工作原理是基于应变效应,即导体或半导体材料在外界力的作用下产生机械变形时,其电阻值相应发生变化,这种现象称为“应变效应”。 2.电阻应变片的结构 基片 b l 电阻丝式敏感栅 金属电阻应变片的结构 4.电阻应变式传感器的应用 (1)应变式力传感器 被测物理量:荷重或力 一
二 主要用途:作为各种电子称与材料试验机的 测力元件、 发动机的推力测试、水坝坝体承载状况监测等。 力传感器的弹性元件:柱式、筒式、环式、悬臂式等 (2)应变式压力传感器 主要用来测量流动介质的动态或静态压力 应变片压力传感器大多采用膜片式或筒式 弹性元件。 (3)应变式容器内液体重量传感器 感压膜感受上面液体的压力。 (4)应变式加速度传感器 用于物体加速度的测量。 依据:a =F/m 。 3.2电容式传感器 3.2.1电容式传感器的工作原理 由绝缘介质分开的两个平行金属板组成的 平板电容器,如果不考虑边缘效应,其电容量为 当被测参数变化使得S 、d 或ε发生变化时, 电容量C 也随之变化。 d S C ε=
高速铁路设备系列介绍之七——列车运行控制系统的列车测速与定位
高速铁路设备系列介绍之七——列车运行控制系统的列车测速与定位: 2008年在世界高速铁路大会上,与会代表在最后讨论中,达成一个新的共识。就是把高速铁路定义为:必须新建的专用铁路并在这个线路上开行运营时速达到250公里以上的动车组和采用了专用的列车控制系统的铁路。也就是说高速铁路有了三个标准。一是新建的专用铁路。所谓的“专用”含义就是新建客运的专用铁路。既有的铁路线跑的客车速度达到也不能算。当然也没必要、没可能在铁路线上要开行超高速度的货运列车。二是开行250公里以上的动车组列车。三是高速铁路最核心、关键的技术是铁路信号设备的新功能——列车的运行控制系统。我们知道,铁路信号原先比喻为是火车的眼睛,经过上百年的历史发展,为保证列车开行的安全和效率,铁路信号早已开始做到由机器控制和人控制相结合,已比喻成为是火车的神经系统了。但这火车的神经系统,普速铁路仅是以人控为主,机器做辅助。而高速铁路是一个电脑化的控制系统,与普速铁路相比是反过来了,机器控制优先为主,人是辅助。只有高速铁路必须要用这样一个最先进的高速列 车运行控制系统,最后才能认定,这条线路是高速铁路。 列车运行控制技术关键技术之一是列车的测速与定位。为确实保证列车距离与速度的安全控制,首要是及时获取列车运行中的速度与位置,测速和定位的正确程度从根本上制约着列车运行控制系统的控制正确程度,测速测距的正确程度过低,不仅会增加列车的不安全因素,并且会造成列控系统预留的安全防护距离过大,从而影响运输效率。 目前有多种列车测速方式。按照速度信息获取的来历,可以把测速方式分成两大类,一类是利用轮轴旋转信息获取列车速度的测速方法。轮轴旋转测速方法又有机电测速方式和脉冲转速传感器方式之分。有机电测速方式正处于被逐步淘汰过程中,不介绍了。脉冲转速传感器方式,其脉冲转速传感器安装在轮轴上,轮轴每转一周,传感器输出一定目标的脉冲,保证脉冲的频率与轮轴的每转速度完成正比。输出脉冲经过断绝和整形后,直接输入到微处置惩罚器进行频率测量并换算成速度和走行距离。轮轴脉冲转速传感器将成为作为主要部件。由于列车在运
压力传感器标定与校准
压力传感器检定: 1.静态检定 2.动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的 主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般 我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为 其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快速变 化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很好地 追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。压力传 感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来描述。 迟滞e H:正行程与反行程之间的曲线的不重合度; 线性度e L(非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的吻合程度; 重复性e R:正行程或反行程曲线多次测量时曲线的一致程度; 置信系数a=2(%)或a=3(%) 贝塞尔公式 线性度、迟滞反映系统误差;重复性反映偶然误差。 误差(三者反应系统总误差)e S:e S=±√e H2+e L2+e R2 或e S=e H+e L+e R 根据检定规程一《压力传感器静态》,在校准精密线性压力传感器时给出的校准曲线有二种最小二乘直线和端点平移线。 动态检定: 1.瞬态激励法(阶跃信号激励) 2.正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时间、过冲量、灵敏度。
传感器及其工作原理教案
江苏省淮阴中学06-07年度优秀教学案例 《传感器及其工作原理》的创新教学设计 王刚 教学依据 ①物理(新人教版)选修3-2第六章第1节《传感器及其工作原理》(P56-P60); ②新物理课程标准(实验). 教学流程图
教学目标1.知识与技能:①知道非电学量转换成电学量的技术意义;②通过实验,知道常见传感器的工作原理;③初步探究利用和设计简单的传感器. 2.过程与方法:①通过对实验的观察、思考和探究,让学生了解传感器、熟悉传感器工作原理;②让学生自己设计简单的传感器,经历科学探究过程,学习科学研究方法,培养学生的实践能力和创新思维能力. 3.情感态度与价值观:在理解传感器工作原理的基础上,通过自己设计简单的传感器,体验科技创新的乐趣,激发学习物理的兴趣. 重、难点 1.几种常见传感器的工作原理(演示实验);2.学生自己设计简单的传感器. 教学策略 用几个有趣的传感器实验引入课题,激发学生探究传感器原理的兴趣.给出“传感器就是把非电学量转换为电学量”的概念之后,重点介绍光敏电阻、金属热电阻、热敏电阻.安排音乐茶杯和火警装置两个设计性问题让学生体会传感器的简单应用.结合电容、霍尔效应、电阻定律等知识让学生设计传感器,进一步深化传感器的工作原理.最后在对本节课总结的基础上,结合《思考与讨论》进行教学反馈. 教学程序 教学环节教学内容及师生互动设计情感与方法 一.课题的引入 二.什么是传感器?【演示实验1】干簧管控制电路的通断 如图,小盒子A的侧面露出一个小灯泡,盒外没有开 关,但是把磁铁B放到盒子上面,灯泡就会发光,把磁铁移 走,灯泡熄灭. 师问:盒子里有怎样的装置,才能实现这样的控制? 生猜:(可以自由讨论,也可以请学生回答) 师生探究:打开盒子,用实物投影仪展示盒内的电路 图,了解元件“干簧管”的结构。探明原因:玻璃管内封入 两个软磁性材料制成的簧片。当磁铁靠近干簧管时,两个簧 片被磁化而接通,电路导通。所以,干簧管能起到开关的作 用。 师点拨:这个装置反过来还可以让我们通过灯泡的发 光情况,感知干簧管周围是否存在着磁场。 【演示实验2】声光控开关控制电路的通断 ①先在普通光照条件下, ②在把开关置于黑暗环境中。 师生总结:声光控开关 师:刚才的两个实验,都用了一种元件,这些元件能够 感受某些信息,通过它能实现电路的自动控制,这种元件有 一个专门的名称:传感器。什么是传感器呢?它能够感受诸 如力、温度、光、声、化学成分等非电学量,并能把它们按 照一定的规律转换为电压、电流等电学量,或转换为电路的 通断。我们把这种元件叫做传感器。它的优点是:把非电学 量转换为电学量以后,就可以很方便地进行测量、传输、处 理和控制了。 其实,传感器并不神秘。你家里可能就有很多的传感 器。请大家相互说说看,你家里,或者在你的生活当中,都 (演示实验1: 干簧管传感器) (干簧管的实 物及原理图) 学生对干簧 管并不熟悉,因 此才有了好奇。 声光控开关在 生活中很普及, 所以又有亲切 感
《压力传感器的静态标定实验》指导书
《自动检测技术》实验指导书 北京交通大学机电学院测控系 2006年9月
实验一压力传感器的静态标定实验 一、实验目的要求 1、了解压力传感器静态标定的原理; 2、掌握压力传感器静态标定的方法; 3、确定压力传感器静态特性的参数。 二、实验基本原理 传感器的标定,就是通过实验建立传感器输入量和输出量之间的关系,同时也确定出不同使用条件下的误差关系。压力传感器的静态标定,主要指通过一系列的标定曲线得到其静态特性指标:非线性、迟滞、重复性和精度等。 三、实验系统 1、系统连接 2、实验设备 活塞式压力计(型号:YS/YU-600型)、标准压力表(精度:0.4级,量程:0~10MPa)、被标定的压力传感器(型号:AF1800,量程:0~10MPa)、数字万用表、标准砝码、工作液体(蓖麻油)。
3、活塞式压力计结构原理 测量活塞以及砝码的重力与螺旋压力发生器共同作用于密闭系统内的工作液体,当系统内工作液体的压力与此重力相平衡时,测量活塞1将被顶起而稳定在活塞筒3内的任一平衡位置上。这时有压力平衡关系: g m m A p )(1 0+= 式中:p 为系统内的工作液体压力;m 与m 0分别为活塞与砝码的质量;g 为重力加速度;A 为测量活塞的有效面积。对于一定的活塞压力计,A 为常数。 在承重托盘上换不同的砝码,由螺旋压力发生器推动工作活塞,工作液体就可处于不同的平衡压力下,因此可以方便而准确地由平衡时所加的砝码和活塞本身的质量得到压力p 的数值。此压力可以作为标准压力,用以校验压力表。如果把被校压力表6上的示值与这一准确的压力p 相比较,便可知道被校压力表的误差大小。也可以关闭a 阀,在b 阀上部接入标准压力表,由压力发生器改变工作液压力,比较被校表和标准表上的示值进行校准。同样,将被校压力表换成压力传感器,就可以通过比较压力传感器测量的压力值和标准表上的示值进行校准,对压力传感器进行静态标定。 4、扩散硅压力传感器 扩散硅压力传感器在单晶硅的基片上扩散出P 型或N 型电阻条,接成电桥。在压力作用下,根据半导体的压阻效应,基片产生压力,电阻条的电阻率产生很大变化,引起电阻的变化,把这一变化引入测量电路。则其输出电压的变化反映了所受到的压力变化。 四、实验方法和要求 1、根据实验设备设计实验电路连线图,装配、检查各种仪器、传感器及压 力表。 2、检查实验电路及油路。
压力传感器标定
燃气联试系统在正式工作之前要进行传感器校标;若测试现场环境发生变化,用户更有必要对传感器重新校标。 本系统用到的传感器有侧燃压力传感器和燃气压力传感器。 1.传感器校标特征图 图5.9 传感器校标特征 2.传感器校标计算公式 标定线的各点压强值对应的高度:(此处侧燃n =7,燃气n =8) 0h =4 04030201h h h h +++ 1h = 414131211h h h h +++ … … n h =2 21n n h h + (5-11) 定义各点压强对应的实际高度:(此处侧燃n =7,燃气n =8) 1P 时,1h -0h =△1h 2P 时,2h -0h =△2h
… … n P 时,n h -0h =△n h (5-12) 计算各标定压强间隔的内插系数:(此处侧燃n =7,燃气n =8) 1k =1 1h △P 2k = 2121 h - h P P -?? … … n k =1 -n n 1h -△h △--n n P P (5-13) 标定压强值求法: m P =1-n P +n K (m H -△1-n h ) (5-14) 其中,m H 为曲线上m 点至零线的高度; n K 为△1-n h 和△n h 之间的换算内插系数; 1-n P 为对应于△1-n h 的压强标定值; m P 为对应m H 高度求得的压强值。 传感器非线性计算公式: △h h △n △h n i n -i ╳100% (5-15) 其中,n 为标定线上的最大台阶数; △n h 为最大标定高度; i h △为第i 阶段的标定高度; i 为标定线是任一个阶梯(i =1、2、3…n ) 计算各点值,取其最大值表示传感器非线性值。 传感器滞后性(迟滞)参数计算公式: i2i1i4i3n 1(h -h h -h ) 4h ??+???╳100% (5-16)
基于多传感器融合的列车测速定位方法
专业知识分享版 使命:加速中国职业化进程 摘 要 以信息融合技术为基础,研究以速度传感器为核心的多传感器融合列车测速定位系统; 通过列车打滑试验,验证和分析该测速定位系统的空滑检测和误差补偿能力。 关键词 城市轨道交通 基于通信的列车运行控制 多传感器融合 列车测速定位 北京地铁亦庄线 1 研究背景 基于通信的列车控制系统( CBTC) 是一种连续的自动列车控制系统,它利用高精度的列车定位( 不依赖于轨道电路) ,采取双向连续、大容量的车地数据通信,依靠车载、地面的安全功能处理器来加以实现。高精度的列车定位技术是 CBTC 系统的关键技术之一,列车位置和速度信息是移动闭塞、列车运行控制的重要参数,精确的列车位置和速度信息能有效地提高行车效率和安全度。在城市轨道交通系统中,列车需要交替运行在地下和地上,运行环境比较复杂,单独依靠一种测速定位技术很难获得高精度的列车位置和速度信息。因此,研究多传感器融合技术,就能够结合不同传感器的优点,弥补各自的缺点,通过冗余互补提供更加可靠、精确的列车速度和位置信息。 1. 1 测速定位技术 测速定位通过不断测量列车的运行速度、对列车的即时速度进行积分的方法,得到列车的运行距离,辅助其他定位方法( 如查询-应答器定位、电子地图匹配) 来获取列车的位置信息。下面对几种主要的测速测距方法进行分析比较。 1) 脉冲转速传感器( odometer) 是通过列车车轮转动产生数字脉冲,输出脉冲信号通过信号处理后,可直接输入微处理器进行计算,得到高测量精度的速度、距离信息。 2) 多普勒雷达( Doppler radar) 依靠雷达向地面发射的信号,检查雷达回波频率与发射信号频率的不同,根据多普勒效应计算列车的运行方向和速度,再对列车的速度进行积分,得到列车的运行距离。 3) 航位推算系统( dead reckoning ,DR) 在航天、航空和航海领域得到广泛应用,航位推算系统一般使用惯性传感器作为航向传感器和位移传感器,具有不与外界发生光电联系和不受气候条件限制的特点。随着惯性传感器的民用普及和成本降低,它成为列车测速测距的一种可选方案。 脉冲转速传感器技术的发展已经相对成熟,在实际应用中实现比较简单,能提供高精度、数字化的速度和距离信息,因此近年来得到了广泛应用。但是,由于以车轮转动作为采集对象间接获取列车速度,车轮磨损产生的轮径变化、运行过程中的空转和滑行会产生较大的误差。雷达和航位推算系统是直接测量列车速度和距离的方式,不存在车轮磨损、空转、滑行等造成的误差。但是,多普勒雷达测速方法比较复杂,需要考虑雷达校正、不同地面反射系数等问题; 航位推算系统受到传感器本身温漂、敏感度等的影响,在短时间内测量具有较高的精度,但长时间使用会导致较大的累积误差,因此在使用航位推算系统进行列车测速定位时,需要解决累积误差的补偿问题。 1. 2 多传感器信息融合方法 多传感器的信息融合要完成同源、同质、非同源、非同质的测量信号融合,需要多领域融合算法的支持。现有的融合算法基本可以分为随机类方法和人工智能类方法: 随机类方法包括加权平均、Kalman 滤波、Bayes 概率推理法、Dempster-Shafer 证据推理、小波变换等,是多传感器融合最常用的方法; 人工智能类方法有模糊逻辑推理、神经网络方法等。目前,已有研究人员将人工智能类方法引入随机类方法,如神经网络与 Kalman 滤波结合、神经网络与小波变换结合等,以解决随机类方法在不确定性推理上存在的一些缺陷。 2 CBTC 列车多传感器融合测速定位研究 尽管基于多传感器信息融合的列车定位方法能够融合多种传感器的信息,获得列车的速度和位置信息,但实际采
对磁悬浮列车运行控制系统的思考
交通运输学院运输1302班11252086 丁耀宗
对磁悬浮列车运行控制系统的思考 ——《列车运行控制系统》课程考察报告 11252086 丁耀宗1综述 高速磁悬浮列车作为一种新型交通工具,以其快捷、安全、舒适、无磨擦、低噪声、低能耗、易维护、无污染等优点吸引着人们的眼球。磁悬浮列车是一种靠磁悬浮力来推动的列车。由于其轨道的磁力使之悬浮在空中,行走时不同于其他列车需要接触地面,因此只受来自空气的阻力。磁悬浮列车的速度可达每小时400公里以上,比轮轨高速列车的380多公里还要快。20世纪末以来,德国、发达国家以及中国都相继开始筹划进行磁悬浮运输系统的开发。我国第一辆磁悬浮列车2003年1月开始在上海运行。磁悬浮列车的普及应用,除了硬件技术问题,首要的就是解决其控制系统的问题。 高速磁悬浮运行控制系统就如同人的大脑,负责安排整个交通系统安全可靠有效的运转,使磁悬浮列车的特点充分展现出来。目前,仅日本和德国对高速磁悬浮运行控制系统的研究技术比较成熟。 2 磁悬浮列车性能简介 高速磁悬浮列车的推力是利用交流同步直线电机(LSM)的原理产生的,该电机与其对应的交流同步旋转电机结村、工作原理
基本相似。它的转子是置于列车底部的直流激励的磁极,定子为沿着线路轨道铺设的三相定子绕组,设置在地面上的变频设备在线路上可分段给定子绕组供电。当三相绕组通入三相对称正弦电流时。在气隙中便形成正弦分布并以同步速度平移的行波磁场,当磁场足够大时则吸引转子而使列车以同步速度行驶。只要安装在路边的变电所内的变频设备把电馈入长定子电缆中,在线路上就会产生使列车移动的磁场,而且频率越高,移动的速度也越大。 由于一个变电所的供电能力有限,因此整个线路被分成数个供电分区,每个分区对应一个变电所,一个变电所只能给一辆列车供电。为提高系统的效率和功率因数,供电分区内的电缆又被分为一个个的小分区,只向有车运行的那个小分区供电,这样也可减小能耗,节约能源,但需要分区转换装置。供电分区供电的模式对磁悬浮列车运行控制也产生了直接的影响。 3磁悬浮列车控制系统特点需求分析 磁悬浮运行控制系统的基本任务和传统轮轨列车类似,就是要根据运行计划,办理列车运行进路,保证进路正确安全;实时控制和监督列车运行速度,防止列车超速;调整列车追踪问隔,保证运行安全,提高运输效率;提供旅客服务信息,提高服务质量。这些要求在磁悬浮交通中需要由地面的运行控制系统自动完成,而在轮轨交通中这些功能主要起辅助司机驾驶的作用。 基于磁悬浮列车的上述特点和工作原理,其列车运行控制系统必须满足以下几点基本要求:
2015—2016学年鲁科版选修3-2 常见传感器的工作原理 教案
5.2 常见传感器的工作原理 [课时安排]1课时 [教学目标]: (一)知识与技能 1.通过实物认识光敏电阻,了解光传感器的工作原理。了解光传感器的用途。2.通过实物认识热电偶和热敏电阻,了解温度传感器的工作原理。了解温度传感器的用途。 3.利用传感器制作简单的自动控制装置,通过实验认识传感器,体会非电学量转换成电学量好处。 (二)过程与方法 实验探究及要求学生使用多种资源去收集信息,多整理信息,最后形成书面报告在课堂上与教师和同学交流。 (三)情感、态度与价值观 激发学生的学习兴趣,拓展他们的视野,培养学生收集信息、与他人进行交流的能力,提高他们的创新意识。 通过分析事例,培养学生全面认识和对待事物的科学态度。 [教学重难点]:光敏电阻和热敏电阻的工作原理及实验设计 [教学器材]:光敏电阻和热敏电阻,小灯炮,干簧管,欧姆表,烧杯,导线,二极管,干电池,开水等 [教学方法]:实验探究,讲授 [教学过程] (一)引入新课 通过教师演示实验,用光敏电阻控制小灯炮的亮暗。 (二)进行新课 一、.光电传感器原理 1、工作原理:光电传感器是指能够感受光信号,并按照一定规律把光信号 转换成电学量信号器件。 光电检测系统中实现光电转换的关键元件,它是把光信号(红外、可见及紫外光辐射)转变成为电信号的器件。光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。 2、干簧管: 3、光敏电阻: A:实验探究及见课件: 用多用电表测量光敏电阻的阻值,改变入射到光敏电阻上光的强度,再次测量阻值,并将各数据记人表格
传感器分类及常见传感器的应用
机电一体化技术常用传感器及其原理 班级:机械设计制造及其自动化姓名: 学号:
一、传感器的分类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。 2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的
测量。 3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。 另外,根据传感器对信号的检测转换过程,传感器可划分为直接转换型传感器和间接转换型传感器两大类。前者是把输入给传感器的非电量一次性的变换为电信号输出,如光敏电
列车测速测距系统
列车测速测距系统设计学院:机械与电子控制工程学院 专业:测控技术与仪器 指导教师:邱成
摘要: (1) 1.系统使用背景 (2) 2.测速系统主体系统流程图 (2) 3.列车测速系统原理 (2) 3.1轮轴脉冲转速传感器 (2) 3.2测速定位法 (3) 3.3信标定位 (3) 4.传感器选型 (4) 4.1 选型标准 (4) 4.2 传感器类型 (4) 4.3 传感器型号 (5) 4.4 选定的传感器 (7) 5.隔离电路 (8) 6.整形电路 (9) 7.数据接收处理系统 (10) 8.电源选择 (11) 总结 (14)
摘要: 本文阐述了基于霍尔传感器的列车测速测距系统的设计,详细给出了系统的构成、传感器的选择、隔离电路和整形电路的设计、单片机系统的设计等问题。 关键词: 霍尔传感器测速测距铁路机车 引言: 随着高速铁路飞速发展,在时速超过350 km/h的高速铁路线路上,列车的测速定位问题显得越来越重要。传统的轨道电路定位法由于定位粗糙、精度不够,并且无法检知列车的即时速度,难以满足高速列车的定位要求。还有一种利用电机方式实现测速定位方法,该方式只适用于列车运行速度较低的线路。测速和定位还可通过外加输入信号直接获取列车的位置和速度信息,但该方式的测量精度受到一些因素的制约,在性价比方面存在局限性。传感器在高速铁路的测速和定位技术中成为当前的主流产品,应用较广,有多种类型:脉冲转速传感器、惯性加速度传感器、相对传感器、地面传感器、绝对传感器等。
1.系统使用背景 随着铁路运输运行速度的提高,为保障列车安全、高效运行,需要设计可靠、精确的列车测速测距系统,以满足行车组织的需要。在列车运行过程中,可能出现打滑、空转等问题,而镟轮等问题也会影响列车测速测距的精准度。为了解决以上问题,我们设计了如下的列车测速测距系统。 2.测速系统主体系统流程图 传感器隔离电路整形电路 信号交换单片机 3.列车测速系统原理 3.1轮轴脉冲转速传感器 轮轴脉冲转速传感器在高速铁路中应用较为广泛。轮轴脉冲转速传感器测速的基本工作原理:利用车轮的周长作为“尺子”测量列车走行距离,根据所测距离测算列车运行速度,其基本公式为: V=πDn/3.6 式中,π=3.14,D为车轮直径,n为车轮转速。 从上式可知,测量列车速度就是检测列车车轮转速和列车轮径。脉冲转速传感器安装在轮轴上,轮轴每转动一周,传感器输出一定数目的脉冲,使脉冲频率与轮轴转速成正比。输出的脉冲经隔离和整形后直接输入计算机CPU进行频率测量,再经换算从而得出车组速度和走行距离闭。其原理框图如图1所示。 图1 脉冲转速传感器原理框图
压力传感器误差及标定方法
压力传感器误差及标定方法 压力传感器是工业实践中最为常用的一种传感器,它在传感器之家中排在第一位,可见其相当重要。我们通常使用的压力传感器主要是基于压电效应而制造出来。压力传感器的性能如何一方面在于合理进行压力传感器的误差补偿。它的误差来源主要是灵敏度误差、偏移量误差、线性误差和滞后误差。由于在整个压力范围内垂直偏移保持恒定,因此变换器扩散和激光调节修正的变化将产生偏移量误差。灵敏度误差,它的大小与压力成正比。如果设备的灵敏度高于典型值,灵敏度误差将是压力的递增函数,否则相反。在实际测量中,滞后误差一般忽略不计,除非在压力变化非常剧烈的场合。线性误差的来源在于传感器敏感器件物理非线性,如果传感器中含有放大器,它还需包括放大器的非线性误差。线性误差曲线可能是凹形的,也可能是凸形的。传感器标定可消除或极大地减小这些误差,而补偿技术通常要求确定系统实际传递函数的参数,而不是简单的使用典型值。电位计、可调电阻以及其他硬件均可在补偿过程中采用,而软件则能更灵活地实现这种误差补偿工作。压力传感器的标定方法主要有:一点标定法:这种标定方法可通过消除传递函数零点处的漂移来补偿偏移量误差,这类标定方法通常称为自动归零。偏移量标定通常在零压力下进行,特别是在差动传感器中,因为在标称条件下差动压力通常为0。
选择标定压力:标定压力的选取决定其获取最佳精度的压力范围,标定点必须根据目标压力范围加以选择,而压力范围可以不与工作范围相一致。而灵敏度标定在数学模型中通常采用单点标定法进行。 三点标定法:线性误差通常都具有一致的形式,它可以通过计算典型实例的平均线性误差,确定多项式函数(a×2+bx+c)的参数而得到。确定了a、b和c后得到的模型对于相同类型的传感器都是有效的。该方法能在无需第3个标定点的情况下有效地补偿线性误差。 工程师在实际设计过程中,应根据精度需要,选择合适的标定方法,另外还需要考虑总的成本。
压力传感器的标定实验
压力传感器的标定实验 为了确保测试仪器的精确度和灵敏度,保证测试仪器测量数据的误差不超出规定的范围,应进行测试仪器示值与标准值校对工作,这一工作过程称为对测试仪器的标定(或称为率定)。测试仪器的标定分为强制性检验和经常性自检。标定的方法可分为对单件测试仪器进行标定和对整个测试系统进行标定。 一、实验目的 学习结构试验常用力传感器原理、使用方法并掌握力传感器的标定。 二、实验仪器及设备 1 静态应变仪一台 2 空心圆管一个 3.电阻应变片,万用表,电烙铁,焊锡,游标卡尺等工具一套 三、实验原理 圆筒式力传感器 应变片粘贴在弹性体外壁应力均匀的中间部分,并均匀对称地粘贴多片。因为弹性元件的高度对传感器的精度和动态特性有影响。所以对空心圆柱一般取H≥D-d+l,式中H为圆柱体高度,D为圆柱外径,d为空心圆柱内径,l 为应变片基长。贴片在圆柱面上的展开位置及其在桥路中的连接,如图2-20所示,其特点是R1、R3串联,R2、R4串联并置于相对位置的臂上,以减少弯矩的影响。横向贴片作温度补偿用。柱式力传感器的结构简单,可以测量大的拉压力,最大可达107N。
(1)打座、清洗:试件表面处理,为了使应变片牢固地粘贴在试件表面上,必须将要贴片处的表面部分打磨,使之平整光洁。清洗使之无油污、氧化层、锈斑等。 (2)定位划线 (3)贴片:粘贴应变片,并压合,使粘合剂的厚度尽量减薄 (4)焊线:引线的焊接处固定以及防护与屏蔽处理等 (5)接桥路 (6)封装 (7)标定 结论:力与ε是呈线性关系的,使用标准的计量仪器对所使用仪器的准确度(精度)进行检测是符合标准的.
通过这次试验我了解到了一些有关传感器的知识,并且动手做了一个电测试验的力学传感器,我们八人合作共同完成了八个应变片的定位焊接工作。并且在老师的指导下完成了标定工作,而在这一过程中我们还是遇到了很多麻烦,例如贴片后线路太复杂,导致与承载体接触,标定时始终无法调零成功,这说明我们的动手能力还有待提高。而最终在我们的共同努力下解决了这一问题,并且很好的完成了实验,最终的标定结果显示我们的传感器做的非常成功,线性非常好。这让我们都非常有成就感,虽然有很多曲折,但我们取得了喜人的结果。这让我明白了合作是非常重要的。