现代数值模拟方法及其应用-浙江大学

现代数值模拟方法及其应用
这是一门什么样的课?
研究生的全校公选课。 (怎么讲,有待实践和探讨) 假设应当具有的基本知识
高等数学 如微积分、级数展开、微分方程 线形代数、概率统计 问题:关于级数展开及其应用
21
()(0)'(0)''(0)...2!
f x f f x f x =+++
答: * 当x 较小时,可取前面几项作为函数的近似
* 当函数形式未知时,可用级数逐项逼近
计算机编程 包括 Linux 系统、画图和数据分析软件, 例如 xmgrace ,mitlab 问题:A=0.0D+00
DO 10 I=1,10 A=A+1.0D+00*I
10 CONTINUE
代表什么含义
物理学 (50%内容或多或少与物理学有关) 最理想是学习过普通物理学
或者中学的物理学,能理解基本的物理问题 比如,物理是研究物质的结构和运动的学科 物质有各种形态,如气态、液态和固态等
物质的运动遵从一定的运动规律 如运动方程,分布函数等 问题:力学、统计物理和量子力学的基本知识
化学、生物学和经济学 简单的基本知识 基本的英文阅读和书写能力
不打算非常系统地讲授种种数值模拟方法 因为时间有限、精力有限 重点讲两种方法
Monte Carlo 模拟 和 分子动力学 简单介绍一些重要的基本方法
一定程度上给出数值模拟方法的概况
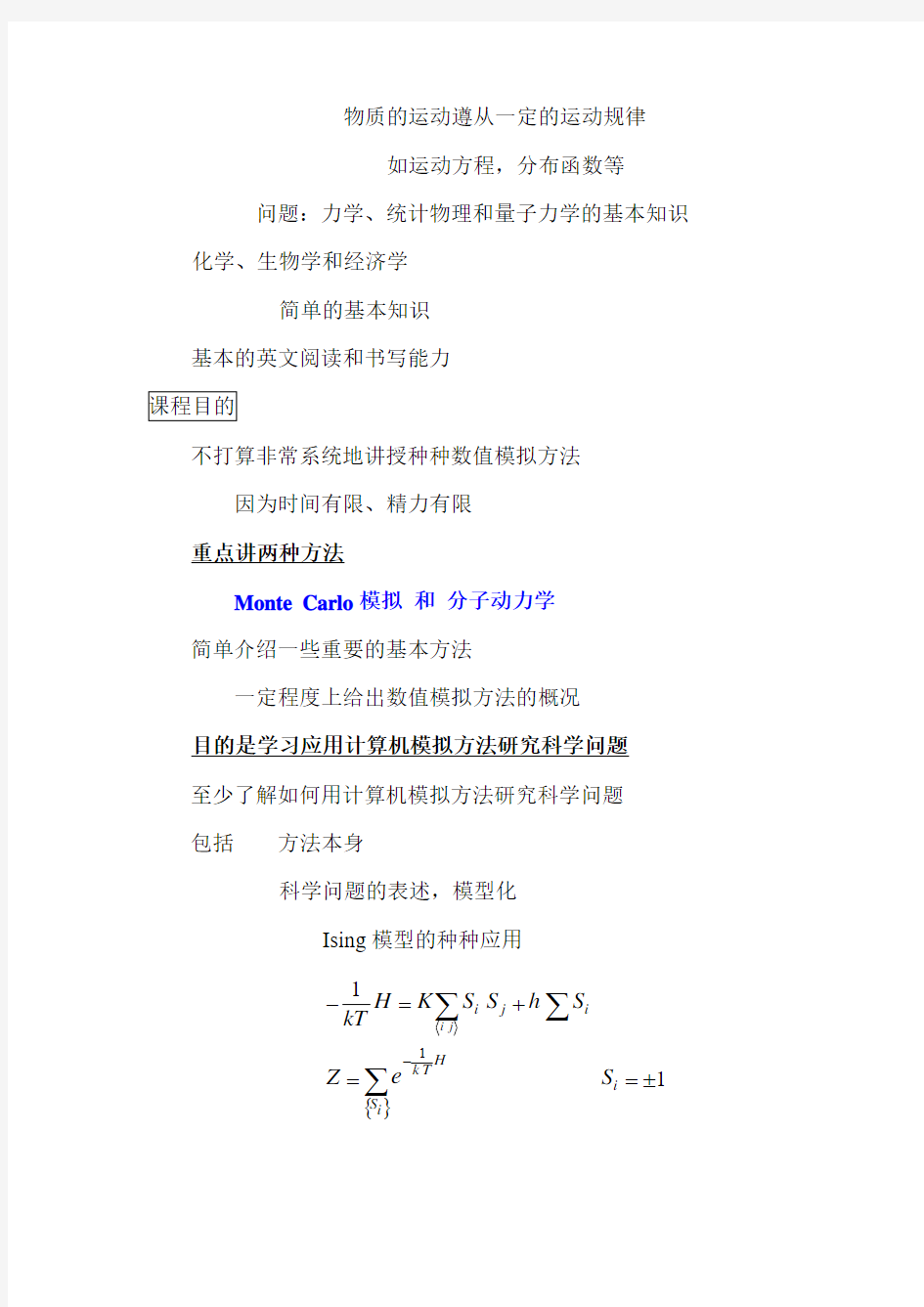
目的是学习应用计算机模拟方法研究科学问题 至少了解如何用计算机模拟方法研究科学问题 包括 方法本身
科学问题的表述,模型化
Ising 模型的种种应用
{}
1
1
1
j
i j i H k T
i S i H K S S h S kT Z S e
--
=+==±∑∑∑
●磁性系统
S代表磁子,可研究磁性材料特性、相变
i
●粒子系统
S代表粒子和空穴,可研究输运过程
i
●二元合金
S代表两种不同成分,可研究合金特性、
i
动力学行为
●金融市场
S代表买卖,可研究市场的统计性质
i
动力学特征
●社会
S代表男人女人
i
方法的适用性、有效性,和方法的发展
数值模拟,如测试
数据分析
问题:如何开始研究
结果评估
计算量估计
撰写论文
换句话说,想告诉大家一些数值模拟研究的思路、方法和体会。这门课不是一门纯粹的理论课程,略偏向实用课程
课程内容取材原则简单、经典、前沿
教师的当前研究课题
为什么学习和应用数值模拟方法?(大道理)
过去20年计算机工业的高速发展
不算网络,我看到三个时代
80’年代的大机器(图片)
90’年代的工作站(在德国的经历)
00’年代的PC机(有人要扔掉两年的PC机)按郝柏林院士的意思,你在赶路,如没赶上时代的高速列车,多少会失去一些东西
计算机速度指数增长
过去28年,计算机能力增长64 000倍
即没3-4年增加4倍
(过去十来年更快些)计算方法带来的计算效率的高速增长
(软件、算法等)
10 times larger at every 4 years
问题:这样的增长的前景
* 计算能力逼近微观世界
* 计算机器件面临量子极限
●计算科学是实验科学和理论科学之外科学的第三分支
具有相当有特色的创造性
既有理论的特点,又有实验的特征
作为理论,趋于‘准确’
具有相当‘普适性’
作为实验,极端和理想(高温高压,纯净)
多快好省
搭起实验和理论之间的一座桥梁
●适合进行交叉学科研究
数值模拟方法具有‘普适性’
对学科的基础知识和基本方法的要求略低
计算物理是计算科学的基础
现象相对简单
理论比较基础,可应用于不同学科
美国Boston Univ. HE Stanley
Citation is within top 100
为什么学习数值模拟方法?(小道理)
●相对容易学习
●相对容易找工作(至少在国外如此)
●有特色的创造性
适合各种人群
●还没有人曾经获得Nobel prize (?)
内容大纲
●引言
计算科学
现代计算机的出现
计算物理学
计算机算法和语言
随机数产生器
●数值积分和Monte Carlo方法
数值积分
Monte Carlo 方法
Metropolis算法和Heat-bath算法
●Monte Carlo方法的应用
磁性材料和相变
Ising 模型的Monte Carlo模拟
动力学慢化
Cluster算法
非平衡态动力学
固液相变
●数值微分和微分方程
数值微分
初值问题
Runge-Kutta方法
●分子动力学及其应用
Verlet算法
分子动力学的简单应用
多体问题
固液相变
热传导
●其他数值计算和数值模拟方法
●数值模拟方法在化学和生物学的应用●数值模拟方法在金融学的应用
物理学家看金融
金融动力学的数值模拟
●计算机编程练习
调查
你希望通过这门课学到什么?
1.认认真真仔仔细细地学一点数值模拟方法及其应用会抽时间编些程序,做些练习
2.只希望对数值模拟方法及其应用的一些概况和前沿动态有所了解,不打算动手编程序
3.只想随便听听,拿点学分
第一章 引言
第一节 计算与科学
我们国家的历史悠长,计算科学也不例外。 圆周率π的计算(祖冲之) 用n 边型逼近圆 周长
n n n l π= (2r =1)
近似公式
3
1223......n a a a n n n
ππ∞=+
+++ (1.1)
π∞便是π的准确值,i a 是待定常数
问题:(1.1) 怎么来的?
n π作为n 的函数,可对1/n 做级数展开
例如,
81632643.061467
3.1214453.136548 3.140331ππππ====
截断(1.1)式到第四项,可求得
3.141583π∞=
与 3.1415926π∞=相差不大
问题: * 如何用多边形的面积近似求π?
* 当n 一定,如何得到较好近似值?
答 : 做外切n 边形 计算的要点:
● 问题的表达: 建立模型
● 计算技巧: 计算方法 ---- 我们课程的要点 ● 计算能力的估计:研究计划
上面的方法是确定论方法。随机方法在现代计算科学也十分重要 构造外切四边形
均匀地随机地在四边形‘抛石子’,统计石子总数M , 和圆内石子数
Ms ,则面积的比 4Ms M π=
问题: 如何随机地‘抛石子’?
随机方法还可以有很多, 例如,
Comte de Buffon (1707-1788) French needle experiment, 1777
随机地抛针
针触到条纹和空隙的概率
习题:试证明 提示:p 正比于 L 反比于 d 关键2/π从哪来? 解 :设针与水平方向夹角为θ 水平方向有效长度为cos L θ
事件总数
/2
/2
22d
d d ππθπ-=? 针触到条纹和空隙的事件数 /2
/2
2cos 4L
d L ππθθ-=?
比较随机方法和确定论方法 ● 随机方法较简单 ● 随机方法较‘普适’
例如,简单应用抛石子的方法,可以计算不规则图形的面积 ● 随机方法的误差收敛较慢 1/M σ
2,L p L d
d
π
=
<
d
不过,对多自由度问题这不是弱点
随机方法依赖于相应的随机模型
即必须能构造出有效的模型,有时相当困难,
比如,牛顿方程和量子力学的动力学
计算科学在现代社会十分重要
例如,制造飞机之前应当先做数值模拟实验
这是节省金钱和生命
飞机失事后,应做事故重构
这可帮助找出事故原因
第二节现代计算机的出现
五千年前巴比伦人发明珠算(奇怪,不是中国人?)19世纪初英国人C Babbage提出计算机的构想
但当时技术不够发达
19世纪末西班牙人Quevedo提出可用电动机械技术构造
计算机,当时的技术可以提供足够的支持
但他没有资金
1889年美国人Hollerith造出第一台计算机,用于人口
普查。卖掉这机器,Hollerith建立了IBM公司
1937年美国理论物理学家Atanasoff制造出电子数字计
算机,但没引起广泛注意
1945年历史书常常引述,美国人Mauchly和Eckert制
造的ENIAC为第一台电子计算机
Metropolis和Frankel用ENIAC研究核裂变1950年MENIAC I
Metropolis提出Monte Carlo方法,并应用
于固液相变的研究(1953)
很多重要的研究工作由MENIAC I完成1970年大规模集成电路计算机
这是高速发展时期的开始
1980年PC机和工作站
计算科学的挑战
全球环境动力学模拟
DNA序列机制
药物设计
材料结构和器件
……
计算物理是计算科学的基础, 各个领域有各个领域的作用,每个人有每个人的贡献。
第三节计算物理学
几乎无所不在,只是深入程度不同。
从方法上看,大体分两类
Monte Carlo 模拟
分子动力学
从领域上看
Nanostructure and Materials Science
Bio-structures and Soft Matter (Polymers, Membranes, Proteins, etc.) Computational Statistical Physics,
Turbulence Plasmas and Reactive Flows New Methods in Computer Simulation
Lattice Gauge Theory and Elementary Particle Physics Computational Aspects of Astrophysics
Quantum simulation (many-body, dynamics, lattice models, etc.) Frontiers in Large Scale Computing and quantum computing Georgia 大学讲座教授
浙江大学光彪讲座教授
国际著名计算物理学家
DP Landau
300 Publications
18 Phys Rev Lett
> 6000 Citations
第四节 计算机算法和语言 1. 算法
计算问题的逻辑步骤称计算机算法 例如,牛顿方程 f m a =
11()n n n n n n x x v v v f x m
ττ++=+=+
称Euler 算法。给出初始位置0x 和速度0v ,可以一步一步求
解牛顿方程
习题:证明Euler 方法准确到()2τO 量级。 算法应当边用边学 2. 计算机语言
Fortran (formula translation )和C 语言都好用 计算机语言的学习不应当成一种理论学习, 而是一种技能的学习,工多手熟 第五节 随机数产生器
如何在边长为1的四边形内均匀地随机地“抛石子”? 设r 为均匀的随机数, []1,0∈r 可取
2
1r y r x ==
则 ()y x , 均匀地随机地分布在四边形内。
在计算机上如何产生 r ?
计算机上没有真正的随机数,只有“近似均匀”的“看起来无规”
的数列{}n r
这样的“赝随机数列产生器”质量标准 ? 足够长的数列
? 足够无规(随机)的数列
例如:可用
n n l x r y r +==
作图,图形应当均匀 ? 速度足够快 最简单的随机数列
()1531mod 716807
021
n n r a r b c a b c +=+====-
{}n r 的长度为]12,1[,12
3131
-∈-n r ,速度非常快,随机性也不
错,但对大规模计算,还不够好。
为了获得]1,0(∈r 可取 1
231-=
n
r r 如果不是专门研究算法,不适宜花太多精力在随机数上,抓到一个比较好的使用即可。
例如,
SUBROUTINE ranecu(iseed1,iseed2,ranec1)
REAL*8 ranec1
INTEGER*4 iran,iseed1,iseed2,kkk
kkk = iseed1 / 53668
iseed1 = 40014 * (iseed1 - kkk * 53668) - kkk * 12211 IF(iseed1 .LT. 0) iseed1 = iseed1 + 2147483563 kkk = iseed2 / 52774
iseed2 = 40692 * (iseed2 - kkk * 52774) - kkk * 3791 IF(iseed2 .LT. 0) iseed2 = iseed2 + 2147483399
iran = iseed1 - iseed2
IF(iran .LT. 1) iran = iran + 2147483562 ranec1 = iran * 4.656612873E-10
RETURN END
有兴趣的同学可比较比较两个随机数的差别。
如何获得其他分布的随机数?
例如:如何由均匀分布的)1,0[∈y 构造按()x P x e -=分布的
),0[∞∈x
设dy 体积元对应dx 体积元,则在该体积元内的随机数的概率与所取变量无关,即
()()x P y dy dy P x dx e dx -===
∴
x e y --=1, ()y x --=1ln
阅读材料:如何产生高斯分布 2
x e -?
重游台湾观感 1.观赏的三重境界
雾里看花 花里看雾 醉入花丛
2.台湾在精神上处于躁动状态
已经不适宜生活
3.海峡两岸拥有诸多共同规律 4、凡事不可勉强
理想是理想,现实是现实
现代控制理论发展史香港科技大学李泽湘教授的报告
自动控制技术与人类科技文明 Automatic Control & Human Civilization 前言 从远古的漏壶和计时容器到公元前的水利枢纽工程,从中世纪的钟摆、天文望远镜到工业革命的蒸汽机、蒸汽机车和蒸汽轮船,从百年前的飞机、汽车和电话通讯到半个世纪前的电子放大器和模拟计算机,从二战期间的雷达和火炮防空网到冷战时代的卫星、导弹和数字计算机,从六十年代的登月飞船到现代的航天飞机、宇宙和星球探测器,这些著名的人类科技发明直接催生和发展了自动控制技术。源于实践,服务于实践,在实践中升华。经过千百年的提炼,尤其是近半个世纪工业实践的普遍应用,自动控制技术已经成为人类科技文明的重要组成部分,在日常生活中不可或缺。随着新型制造业的兴起和网络信息技术的进步,自动控制技术的发展与应用将进入一个全新的时代,新的维纳和卡尔曼将陆续诞生。数风流人物,还看今朝。 1
I.前期控制(Early Control)(1400B.C. - 1900) (0)中国,埃及和巴比伦出现自动计时漏壶 (1400B.C. ~1100B.C.)。孙武著《孙子兵法》 (600B.C.) (1)秦昭王时,李冰主持修筑都江堰体现的系 西汉漏壶统观念和实践(300B.C.) 2
(2)亚历山大的希罗发明开闭庙门和分发圣水等自动装置(100年) (3)中国张衡发明水运浑象,研制出自动测量地震的候风地动仪(132年) 3
(4)中国马钧研制出用齿轮传动的自动指示方向的指南车(235年) (5)中国定向驾驶舵(1180年) (人类首台控制机构)(6)中国明代宋应星所著《天工开物》 记载有程序控制思想(CNC)的提花织 机结构图(1637年) 4
现代控制理论试题
现代控制理论试题 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系 统的那些性质 2、如何判断线性定常系统的能控性如何判断线性定常系统的能观性 3、传递函数矩阵的最小实现A、B、C和D的充要条件是什么 4、对于线性定常系统能够任意配置极点的充要条件是什么 5、线性定常连续系统状态观测器的存在条件是什么 三、计算题(70分) 1、RC 无源网络如图1所示,试列写出其状态方程和输出方程。其中,为系统的输入,选两端的电压为状态变量,两端的电压为状态变量,电压为为系统的输出y。 2、计算下列状态空间描述的传递函数g(s) 图1:RC无源网络 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解和 5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即是否为大范围渐 近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为,和。 现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。
浙江大学课程简介和教学大纲格式
实验课程简介和实验教学大纲格式 课程名称: 英文名称: 课程编号: 课程学分:实验学分:实验总学时: 面向对象: 预修课程要求: 一、课程介绍 (一)中文简介(100-150字) (二)英文简介 二、教学目标 三、课程要求(包括考勤制度、实验室安全、实验准备、实验报告、考核方式等) 四、主要仪器设备 五、实验课程内容与学时分配 六、参考教材及相关资料 七、课程教学网站 示例 课程名称:大学化学实验A 英文名称:Experiments of College Chemistry 课程编号:06112200 课程学分:1 实验学分:1 实验总学时:32 面向对象:化学与制药类;食品科学与工程;环境科学与工程类;化工与制药类;生物工程类;生物系统工程类 预修课程要求:按课程要求规定 一、课程介绍 (一)中文简介:(100-150字) 大学化学实验A是依据物质的物理和物理化学性质建立发展起来的分析方法所开设的课程。掌握和运用各种复杂的分析仪器对近化类学生从事科学研究和工作是非常必要的。大学化学实验A是化学类学生的专业基础课,是一门理论性及实践性很强的课程。教学中涉及较新和较广泛的仪器分析方法。 (二)英文简介: 二、教学目标 通过这种多层次、全面系统的实验训练,应达到下列要求: 1、使学生初步了解仪器分析的研究方法,掌握其基本实验技术和技能。 2、学会并掌握化学实验现象的观察和记录、实验条件的判断和选择、实验数据的测量和处理、实验结果的分析和归纳等一套严谨的实验方法。 3、熟悉常用现代分析仪器的操作使用,规范地掌握仪器分析的定性、定量分析的基本实验操作和技能。 4、了解常用仪器的构造、原理及其使用方法,了解近代大型精密仪器的性能及其在化学和高新技术中的应用。 5、在实验的全过程中,培养学生勤奋学习、求真、求实的科学品德,培养学生的动手能力、观察能力、查阅文献能力、思维能力、想象能力、表达能力。
现代控制理论概述及实际应用意义
13/2012 59 现代控制理论概述及实际应用意义 王 凡 王思文 郑卫刚 武汉理工大学能源与动力工程学院 【摘 要】控制理论作为一门科学技术,已经广泛地运用于我们社会生活的方方面面。本文介绍了现代控制理论的产生、发展、内容、研究 方法和应用以及经典控制理论与现代控制理论的差异,并介绍现代控制理论的应用。提出了学习现代控制理论的重要意义。【关键词】现代控制理论;差异;应用;意义 1.引言 控制理论作为一门科学技术,已经广泛地运用于我们社会生活的方方面面。例如,我们的教学也使用了控制理论的方法。老师在课堂上讲课,大家在课堂上听,本身可看作一个开环函数;而同学们课下做作业,再通过老师的批改,进而改进和提高老师的授课内容和方法,这就形成了一个闭环控制。像这样的例子很多,都是控制理论在生活中的应用。现代控制理论如此广泛,因此学好现代控制理论至关重要。 2.现代控制理论的产生与发展现代控制理论的产生和发展经过了很长的时期。从现代控制理论的发展历程可以看出,它的发展过程反映了人类由机械化时代进入电气化时代,并走向自动化、信息化、智能化时代。其产生和发展要分为以下几个阶段的发展。 2.1 现代控制理论的产生在二十世纪五十年代末开始,随着计算机的飞速发展,推动了核能技术、空间技术的发展,从而对出现的多输入多输出系统、非线性系统和时变系统的分析与设计问题的解决。 科学技术的发展不仅需要迅速 地发展控制理论,而且也给现代控制理论的发展准备了两个重要的条件—现代数学和数字计算机。现代数学,例如泛函分析、现代代数等,为现代控制理论提供了多种多样的分析工具;而数字计算机为现代控制理论发展提供了应用的平台。 2.2 现代控制理论的发展五十年代后期,贝尔曼(Bellman)等人提出了状态分析法;在1957年提出了动态规则;1959年卡尔曼(Kalman)和布西创建了卡尔曼滤波理论;1960年在控制系统的研究中成功地应用了状态空间法,并提出了可控性和可观测性的新概念;1961年庞特里亚金(俄国人)提出了极小(大)值原理;罗森布洛克(H.H.Rosenbrock)、麦克法轮(G.J.MacFarlane)和欧文斯(D.H.Owens)研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。 20世纪70年代奥斯特隆姆(瑞典)和朗道(法国,https://www.360docs.net/doc/e36349262.html,ndau)在自适应控制理论和应用方面作出了贡献。 与此同时,关于系统辨识、最优控制、离散时间系统和自适应控制的发展大大丰富了现代控制理论的内容。 3.现代控制理论的内容及研究方法 现代控制理论的内容主要有为系统辨识;最优控制问题;自适应控制问题;线性系统基本理论;最佳滤波或称最佳估计。 (1)系统辨识 系统辨识是建立系统动态模型的方法。根据系统的输入输出的试验数据,从一类给定的模型中确定一个被研究系统本质特征等价的模型,并确定其模型的结构和参数。 (2)最优控制问题 在给定约束条件和性能指标下,寻找使系统性能指标最佳的控制规律。主要方法有变分法、极大值原理、动态规划等极大值原理。现代控制理论的核心即:使系统的性能指标达到最优(最小或最大)某一性能指标最优:如时间最短或燃料消耗最小等。 (3)自适应控制问题 在控制系统中,控制器能自动适应内外部参数、外部环境变化,自动调整控制作用,使系统达到一定意义下的最优。模型参考自适应控制
华南农业大学现代控制理论期末考试试卷
华南农业大学期末考试试卷(A卷)2007 学年第1 学期考试科目:自动控制原理II 考试类型:闭卷考试时间:120 分钟 学号年级专业 题号 1 2 3 4 5 6 7 8 9 10 总分得分 评阅人 1、已知下图电路,以电源电压u(t)为输入量,求以电感中的电流和电容中的电压作为状态变量的状态方程,和以电阻R 2 上的电压为输出量的输出方程。并画出相应的模拟结构图。(10分) 解:(1)由电路原理得: 1 1 2 2 12 1 111 2 22 11 1 11 L L c L L c c L L di R i u u dt L L L di R i u dt L L du i i dt c c =--+ =-+ =- 22 2 R L u R i = 11 22 1 11 1 2 22 1 01 1 00 11 L L L L c c R i i L L L R i i u L L u u c c ?? --?? ???? ?? ?? ???? ?? ?? ???? ?? =-+?? ???? ?? ?? ???? ?? ?? ???? ?? ?? - ???? ?????? ?? ?? g g g
[]1222 00L R L c i u R i u ??????=?????????? 2、建立下列输入-输出高阶微分方程的状态空间表达式。(8分) 322y y y y u u u +++=++&&&&&&&&& 解:方法一: 12301233,2,10,1,2,1 a a a b b b b ======= ()001110221120331221300 1301 231201 13121102 b b a b a a b a a a ββββββββββ===-=-?==--=-?-?=-=---=-?--?-?= ()010100111232100x x u y x ?????? ? ?=+-? ? ?? ? ?---????? ?=?& 方法二:
现代控制理论基础试卷及答案
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: ) 一.填空题(共27分,每空分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T为周期进 行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为__________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义能量, V(x, t)称为___________。8." 9.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函数的所有 极点具有______。 10.控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的 _________、_________和较强的_________。 11.所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 12.实际的物理系统中,控制向量总是受到限制的,只能在r维控制空间中某一个控制域内取值,这个控制域称为_______。 13._________和_________是两个相并行的求解最优控制问题的重要方法。二.判断题(共20分,每空2分) 1.一个系统,状态变量的数目和选取都是惟一的。(×) 2.传递函数矩阵的描述与状态变量选择无关。(√) 3.状态方程是矩阵代数方程,输出方程是矩阵微分方程。(×) 4.对于任意的初始状态) ( t x和输入向量)(t u,系统状态方程的解存在并且惟一。(√) 5.( 6.传递函数矩阵也能描述系统方程中能控不能观测部分的特性。(×) 7.BIBO 稳定的系统是平衡状态渐近稳定。(×)
现代控制理论心得
现代控制理论课程心得 摘要:从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,本人选择了最为感兴趣的几个知识点进行分析,并谈一下对于学习这么课程的一点心得体会。 关键词:现代控制理论;学习策略;学习方法; 学习心得在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合, 各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社 会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的主要课程。从经典控制论发展到现代控制论,是人类对控制技术认识上的一次 飞跃。经典控制论限于处理单变量的线性定常问题,在数学上可归结为单变 量的常系数微分方程问题。现代控制论面向多变量控制系统的问题,它是以 矩阵论和线性空间理论作为主要数学工具,并用计算机来实现。现代控制论 来源于工程实际,具有明显的工程技术特点,但它又属于系统论范畴。系统 论的特点是在数学描述的基础上,充分利用现有的强有力的数学工具,对系 统进行分析和综合。系统特性的度量,即表现为状态;系统状态的变化,即为动态过程。状态和过程在自然界、社会和思维中普遍存在。现代控制论是在 引入状态和状态空间的概念基础上发展起来的。状态和状态空间早在古典动力学中得到了广泛的应用。在5O年代Mesarovic教授曾提出“结构不确定性原理” ,指出经典理论对于多变量系统不能确切描述系统的内在结构。后来采用 状态变量的描述方法,才完全表达出系统的动力学性质。6O年代初,卡尔曼(Kalman) 从外界输入对状态的控制能力以及输出对状态的反映能力这两方面提出能控制性和能观性的概念。这些概念深入揭示了系统的内在特性。实际上,现代控制论中所研究的许多基本问题,诸如最优控制和最佳估计等,都是以能能控性和能观性作为“解”的存在条件的。现代控制理论是一门工程理论性强的 课程,在自学这门课程时,深感概念抽象,不易掌握;学完之后,从工程实际抽象出一个控制论方面的课题很难,如何用现代控制论的基本原理去解决生产实际问题则更困难,这是一个比较突出的矛盾。对现代控制理论来说,首先遇到的问题是将实际系统抽象为数学模型,有了数学模型,才能有效地去研究系统的各个方面。许多机电系统、经济系统、管理系统常可近似概括为线。
(完整版)现代控制理论考试卷及答案
西北工业大学考试试题(卷)2008 -2009 学年第2 学期
2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+- +-+- ++-+=??????-+++=-??? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 21221112112 213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ 第三题(15分,答案不唯一,这里仅给出可控标准型的结果) (1) 系统动态方程(3分) []x y u x x 0010 1003201 00010=???? ??????+??????????--=&
文献综述-浙江大学现代教务管理系统
文献综述本论文的题目是《我与我们:从豆瓣网看网络交往中的身份建构》,作为本研究的理论视角,网络交往中的身份建构是文献综述的重要组成部分;作为本研究的典型例证,对“豆瓣网”等研究的文献梳理也不容忽视。 一.身份的概念阐释 身份是在某一语境下,回答一个人或一群人究竟是谁的问题。 “身份”一词来源于西方文化,译自“Identity”,伴随着人类的出现而产生。Identity最早用于代数和逻辑学,意为同一或相同;后来与哲学中的认识主体问题发生关联,指物质、实体存在上的同一性质或状态;埃里克森(E.H. Erikson)最早将其引入心理学,作为社会心理分析的技术术语来使用。 经过几十年的发展,学者从社会学、心理学、文化学等角度对身份进行了多维分析。英国学者安东尼·吉登斯(Anthony Giddens)认为身份具有可塑性,借助外来因素能完成自身身份的建构。1社会心理学家Tajfel和Turner区分了个体身份和社会身份,认为社会身份的取得来自群体成员资格。2美国学者亨廷顿(Samuel Phillips Huntington)认为,为了建立我们的身份,必须寻找对立面,即建构“敌人”,从对“敌人”的想象中寻求我们自身的形象。3 综合对身份概念的阐述,它有两个相互对立的意思:一方面是“本身、个性”,即作为一个长期存在的实体的个人所具有的不同于他人的鲜明个性;另一方面是“相同性、同一性”,即自我归类,强调与他者共有的素质或状况。简要地说,身份既揭示了“我们”是谁的问题,又区分了“他们”是谁。总之,身份是建立在对我和他、我的社会和他的社会区分的基础上,是一个求同存异的建构过程,因而对身份建构的研究也就是对个人与社会、个体与集体关系的研究。 二.国内外研究现状 1.媒介角度的身份建构研究数量少、发展慢 身份建构并不是一个新鲜的话题,关于“我是谁”的身份建构研究已成为国内外诸多学科研究的热点。总体说来,从不同学科出发,身份建构的研究可归为以下几类:社会学领域关于性别、种族、阶级、亚文化等群体身份的建构;文学领域从后殖民主义和文化研究角度的文化身份建构;哲学领域关于主体和身份的探讨;人类学领域关于族裔的身份研究;教育学领域关于身份建构的教育研究。 虽然相关研究由来已久且数量颇多,但比较而言,从媒介角度切入进行有关身份的构造性研究 1张旭鹏文:“论欧洲一体化的文化认同建构”,《云南民族大学学报(哲学社会科学版)》,2004年3期。 2 Tajfel H, Turner J C. The social identity theory of intergroup behavior. Psychology of Inrergroup Relations. Chicago: Nelson Hall, 1986:16-17.
现代控制理论试题
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么? 4、对于线性定常系统能够任意配置极点的充要条件是什么? 5、线性定常连续系统状态观测器的存在条件是什么? 三、计算题(70分) 1、RC无源网络如图1所示,试列写出其状态方程和输出方程。其中,错误!未找到引用源。为系统的输入,选错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,电压错误!未找到引用源。为为系统的输出y。 图1:RC无源网络 2、计算下列状态空间描述的传递函数g(s) 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解错误!未找到引用源。和错误! 未找到引用源。
5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即错误!未找到引用源。是 否为大范围渐近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为错误!未找到引用源。,错误!未找到引用源。和错误!未找到引用源。。
现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性? 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。 2、何为系统的最小实现? 答:由传递函数矩阵或相应的脉冲响应来建立系统的状态空间表达式的工作,称为实现问题。在所有可能的实现中,维数最小的实现称为最小实现。 3、何为系统的渐近稳定性? 答:若错误!未找到引用源。在时刻错误!未找到引用源。为李雅普若夫意义下的稳定,且存在不依赖于错误!未找到引用源。的实数错误!未找到引用源。和任意给定的初始状态错误!未找到引用源。,使得错误!未找到引用源。时,有错误!未找到引用源。,则称错误!未找到引用源。为李雅普若夫意义下的渐近稳定 二、简答题 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 答:系统做线性变换后,不改变系统的能控性、能观性,系统特征值不变、传递函数不变 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 答:方法1:对n维线性定常连续系统,则系统的状态完全能控性的充分必要条件为:错误!未找到引用源。。 方法2:如果线性定常系统的系统矩阵A具有互不相同的特征值,则系统能控的充要条件是,系统经线性非奇异变换后A阵变换成对角标准形,且错误!未找到引用源。不包含元素全为0的行 线性定常连续系统状态完全能观测的充分必要条件是能观性矩阵错误!未找到引用源。满秩。即:错误!未找到引用源。 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么?
《现代控制理论基础》考试题B卷及答案
一.(本题满分10分) 请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。 【解答】根据基尔霍夫定律得: 1113222332 1L x Rx x u L x Rx x Cx x x ++=?? +=??+=? 改写为1 13111 22 322 312 11111R x x x u L L L R x x x L L x x x C C ? =--+?? ?=-+???=-?? ,输出方程为2y x = 写成矩阵形式为
[]11 111222 2 331231011000110010R L L x x L R x x u L L x x C C x y x x ??? --???????????????? ???????=-+???? ??????? ??????????????? ? ???-?????? ? ? ??? ?? ?=??? ?????? 二.(本题满分10分) 单输入单输出离散时间系统的差分方程为 (2)5(1)3()(1)2()y k y k y k r k r k ++++=++ 回答下列问题: (1)求系统的脉冲传递函数; (2)分析系统的稳定性; (3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。 【解答】 (1)在零初始条件下进行z 变换有: ()()253()2()z z Y z z R z ++=+ 系统的脉冲传递函数: 2()2 ()53 Y z z R z z z +=++ (2)系统的特征方程为 2()530D z z z =++= 特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。 (3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到 21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+ 由已知得 (2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+- []212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有: 212(1)3()5()3()x k x k x k r k +=--- 又因为 12(1)()()x k x k r k +=+ 所以状态空间表达式为
现代控制理论课后习题答案
绪论 为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。 根据老师要求,本次任务分组化,责任到个人。我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。2.题解详略得当,老师要求的步骤必须写上。3.遇到一题多解,要尽量写出多种方法。 本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!
这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。 本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正! 2014年6月2日 第一章 控制系统的状态空间表达式 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 解:由图,令32211,,x u x i x i c ===,输出量22x R y =
现代控制理论考试卷及答案
西北工业大学考试试题(卷) 2008 -2009 学年第2 学期 ? 2? 设系统的传递函数为
[y b =21x x kx =-- · @
} 2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+-+-+- ++-+=??????-+++=-? ?? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 2 1221112112213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ *
现代控制理论期末试卷
一、(10分,每小题1分) 1、任一线性连续定常系统的系统矩阵均可对角形化。(×) 2、对SISO 线性连续定常系统,传递函数存在零极点对消,则系统一定不能观且不能控制。(×) 3、对线性连续定常系统,非奇异变换后的系统特征值不变。(√) 4、对于线性连续定常系统的最小实现是唯一的。(×) 5、稳定性问题是相对于某个平衡状态而言的。(√) 6、Lyapunov 第二法只给出了判定稳定性的充分条件。(√) 7、对于SISO 线性连续定常系统,状态反馈后形成的闭环系统零点与原系统一样。(√) 8、对于一个系统,只能选取一组状态变量。(×) 9、对于一个n 维的线性定常连续系统,若其完全能观,则利用状态观测器实现的状态反馈闭环系统是2n 维的。(√) 10、对线性定常系统,其Lyapunov 意义下的渐近稳定性和矩阵特征值都具有负实部是一致的。(√) 二(10分,每小题5分) (1)简述平衡状态及平衡点的定义。 (2)简述状态方程解的意义。 解:(1)状态空间中状态变量的导数向量为零向量的点。由平衡状态在状态空间中所确定的点称之为平衡点。 (2)线性连续定常系统状态方程的解由两部分组成,一部分是由初始状态所引起的自由运动即零输入响应,第二部分是由输入所引起的系统强迫运动,与输入有关称为零状态响应。 三、(10分)考虑如图的质量弹簧系统。其中,m 为运动物体的质量,k 为弹簧的弹性系数,h 为阻尼器的阻尼系数,f 为系统所受外力。取物体位移为状态变量x 1,速度为状态变量x 2,并取位移为系统输出y ,外力为系统输入u ,试建立系统的状态空间表达式。 解: f ma =……………………………….……1分 令位移变量为x 1,速度变量为x 2,外力为输入u ,有 122u kx kx mx --=………………………………2分 于是有 12x x =………………………………..……………1分 2121k h x x x u m m m =--+……….….……………….2分 再令位移为系统的输出y ,有
现代控制理论试题(详细答案)
现代控制理论试题B 卷及答案 一、1 系统[]210,01021x x u y x ? ??? =+=????-???? 能控的状态变量个数是cvcvx ,能观测的状态变量个数是。 2试从高阶微分方程385y y y u ++= 求得系统的状态方程和输出方程(4分/个) 解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。状态变量个数是2。…..(4分) 2.选取状态变量1x y =,2x y = ,3x y = ,可得 …..….…….(1分) 12233131 835x x x x x x x u y x ===--+= …..….…….(1分) 写成 010*********x x u ???? ????=+????????--???? …..….…….(1分) []100y x = …..….…….(1分) 二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。 (3分) 2已知系统[]210 020,011003x x y x ?? ??==?? ??-?? ,判定该系统是否完 全能观?(5分)
解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++- ,时系统从第 k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于 0的有限数,那么就称此系统在第k 步上是能控的。若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。…..….…….(3分) 2. [][]320300020012 110-=?? ?? ? ?????-=CA ………..……….(1分) [][]940300020012 3202=?? ?? ? ?????--=CA ……..……….(1分) ???? ? ?????-=??????????=940320110 2CA CA C U O ………………..……….(1分) rank 2O U n =<,所以该系统不完全能观……..….……. (2分) 三、已知系统1、2的传递函数分别为 2122211 (),()3232 s s g s g s s s s s -+==++-+ 求两系统串联后系统的最小实现。(8分) 解 112(1)(1)11 ()()()(1)(2)(1)(2)4 s s s s g s g s g s s s s s s -+++== ?=++--- …..….……. (5分) 最小实现为
浙大考博辅导班:2019浙大光华法学院考博难度解析及经验分享
浙大考博辅导班:2019浙大光华法学院考博难度解析及经验分享浙江大学前身求是书院成立于1897年,是中国人自己最早创办的新式高等学府之一。经过一百多年的建设和发展,学校已成为一所基础坚实、实力雄厚,特色鲜明,居于国内一流水平,在国际上有较大影响的研究型、综合型大学,是首批进入国家“211工程”、“985工程”和“双一流”建设的若干所重点大学之一,可在哲学、经济学、法学、教育学、文学、历史学、理学、工学、农学、医学、管理学和艺术学等12个学科门类授予学术性学位,并有可授予博士专业学位类别4个,可授予硕士专业学位类别27个,是全国重要的研究生培养基地。 下面是启道考博辅导班整理的关于浙江大学光华法学院考博相关内容。 一、院系简介 浙江大学光华法学院的前身是创建于1945年的浙江大学法学院,著名法学家李浩培教授出任首任院长。当时海内外许多著名法学大家前来任教或讲学,哈佛大学法学院院长、社会法学派的代表罗斯科?庞德教授就曾在法学院授业传道。 1952年院系调整时,原国立浙江大学成为单一的理工科大学。1980年,原杭州大学重建法律系,原浙江大学在1995年设立国际经济法系。1998年,经国务院批准,由四所同根同源的浙江大学、杭州大学、浙江医科大学与浙江农业大学合并组建新的浙江大学。随即组建成立了新的浙江大学法学院。 2006年9月,香港光华教育基金会向浙江大学捐赠,支持建设“浙江大学光华法学院”。经国家教育部批准,浙江大学光华法学院于2007年4月20日成立,是年秋天,迁址于百年老校园----浙江大学之江校区。 光华法学院秉承“求是厚德,明法致公”的院训,坚持“专业典范,社会公义”的法科教育理想,守候“返回法的形而下”的学术旨趣,营造“以学生为本,师生互动”的学院氛围。围绕浙江大学2020年基本建设世界一流大学的总体发展目标,努力与学校2020年左右基本建成世界一流大学同步跻身世界一流法学院行列。 二、招生信息 浙江大学光华法学院博士招生专业有9个: 法学理论030101 研究方向:法理学、法哲学、法律社会学、人权法、法本体论、法律方法、地方法制原理、比较法律史、法律文化、法律社会学、法律方法论、司法理论
现代控制理论的产生、发展、内容、研究方法和应用经典控制理论与现代控制理论的差异
现代控制理论的产生、发展、内容、研究方法和应用经典控制理论与现代控制理论的差异 建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。它所采用的方法和算法也更适合于在数字计算机上进行。现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。现代控制理论的名称是在1960年以后开始出现的,用以区别当时已经相当成熟并在后来被称为经典控制理论的那些方法。现代控制理论已在航空航天技术、军事技术、通信系统、生产过程等方面得到广泛的应用。现代控制理论的某些概念和方法,还被应用于人口控制、交通管理、生态系统、经济系统等的研究中。 现代控制理论是在20世纪50年代中期迅速兴起的空间技术的推动下发展起来的。空间技术的发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题。这类控制问题十分复杂,采用经典控制理论难以解决。1958年,苏联科学家Л.С.庞特里亚金提出了名为极大值原理的综合控制系统的新方法。在这之前,美国学者R.贝尔曼于1954年创立了动态规划,并在1956年应用于控制过程。他们的研究成果解决了空间技术中出现的复杂控制问题,并开拓了控制理论中最优控制理论这一新的领域。1960~1961年,美国学者R.E.卡尔曼和R.S.布什建立了卡尔曼-布什滤波理论,因而有可能有效地考虑控制问题中所存在的随机噪声的影响,把控制理论的研究范围扩大,包括了更为复杂的控制问题。几乎在同一时期内,贝尔曼、卡尔曼等人把状态空间法系统地引入控制理论中。状态空间法对揭示和认识控制系统的许多重要特性具有关键的作用。其中能控性和能观测性尤为重要,成为控制理论两个最基本的概念。到60年代初,一套以状态空间法、极大值原理、动态规划、卡尔曼-布什滤波为基础的分析和设计控制系统的新的原理和方法已经确立,这标志着现代控制理论的形成。 现代控制理论所包含的学科内容十分广泛,主要的方面有:线性系统理论、非线性系统理论、最优控制理论、随机控制理论和适应控制理论。 线性系统理论它是现代控制理论中最为基本和比较成熟的一个分支,着重于研究线性系统中状态的控制和观测问题,其基本的分析和综合方法是状态空间法。按所采用的数学工具,线性系统理论通常分成为三个学派:基于几何概念和方法的几何理论,代表人物是W.M.旺纳姆;基于抽象代数方法的代数理论,代表人物是R.E.卡尔曼;基于复变量方法的频域理论,代表人物是H.H.罗森布罗克。 非线性系统理论非线性系统的分析和综合理论尚不完善。研究领域主要还限于系统的运动稳定性、双线性系统的控制和观测问题、非线性反馈问题等。更一般的非线性系统理论还有待建立。从70年代中期以来,由微分几何理论得出的某些方法对分析某些类型的非线性系统提供了有力的理论工具。 最优控制理论最优控制理论是设计最优控制系统的理论基础,主要研究受控系统在指定性能指标实现最优时的控制规律及其综合方法。在最优控制理论中,用于综合最优控制系统的主要
浙江大学本科生对外交流学分认定及转换管理条例
浙江大学本科学生对外交流课程学分 认定及替换办法(暂行) 20161017 为适应高等教育国际化的发展趋势,扩大学生的国际视野,增强学生的国际竞争力,学校在鼓励学生积极参与对外交流的同时,规范对外交流期间所修课程学分、成绩的认定及替换工作,根据《浙江大学本科课程学分替换管理办法》,特制定本办法。 一、基本原则 1. 如实记载原则 交流学习时间记入学籍档案;所修课程学分、成绩记入学生本人成绩单。所修课程成绩不计入绩点计算。 2. 公平、公正原则 学生须提交由交流学校/单位开具的官方、原始成绩单,以及课程的教学大纲。 3. 个性化原则 学生可根据本专业培养方案的要求,有选择地进行课程学分认定及替换。 4. 公开原则 课程学分认定及替换工作由开课学院(系)评定。 课程学分认定及替换完成后,公示7天方能有效。 二、申请范围 与学校签署有对外交流协议的大学/单位,以及学生提供资料显
示在全球有其较高地位或声誉的未签署协议的大学/单位,所开设课程。 三、标准 (一)课程学分认定及替换的标准 1. 课程学分认定标准 学分与学时对应关系为1学分对应16学时,此学时数仅为授课学时,不包含自修、课外作业等时间。 若对方的学时数高于我校的,可参照以下公式转换: 则学分转换计算公式可为:转换学分=(外校学时数*X/45)/16,取小数点后1位,不四舍五入 2. 课程替换标准 学生申请校外学分替换的课程,应符合我校相关院系专业培养方案课程修读的要求,替换成功后,相应课程可以免修。 (二)学生在交流学习期间修读的课程可申请替换成对应的校内课程及无法课程两类。 1.申请替换对应的课程学分 学生在交流学习期间修读的课程,其内容与我校相关课程相似度达到70%及以上的,经开课院系论证认定,可以申请转为相应的校内课程。 学生在交流学习期间修读的课程,其学分/学时数大于我校的,可以申请替换为我校一门以上课程。 学生在交流学习期间修读的课程,其学分/学时数低于我校的,可以选择两门以上的相似课程申请替换为我校的一门课程。