基于MC9S12XS128微控制器的智能车硬件设计
收稿日期:2009-07-01
稿件编号:200907001
基金项目:安徽省高等学校优秀青年人才基金项目(2009SQRZ159);合肥学院自然科学基金项目(08KY006ZR );
合肥学院重点实验室建设资助项目。
作者简介:刘伟(1979—),男,安徽寿县人,博士研究生。研究方向:智能控制与模式识别。
随着汽车电子业的迅猛发展,智能车作为电子计算机等最新科技成果与现代汽车工业相结合的产物,因其具有的智能特点而成为研究重点。“飞思卡尔”杯全国大学生智能汽车比赛在此背景下产生[1],竞赛规则规定,赛车在设定的赛道上能够自主行驶,并以最短的时间跑完全程者获胜。因此,智能车硬件不断创新以适应小车的速度要求。本文以MC9S12XS128为核心处理器,通过实验比较智能车各个模块电路设计方案,从而设计出性能稳定的硬件电路,经大赛实际检验性能良好稳定。
1系统整体方案设计
1.1智能车功能设计
根据大赛规则,智能车应具有路径识别、方向控制、速度控制、状态检测等功能,设计采用大赛指定的飞思卡尔16位微控制器MC9S12XS128单片机作为核心控制单元,利用CCD 摄像头作为识别路径的传感器,经MC9S12XS128MCU 的I/O 端口处理[2],控制赛车的运动决策,同时内部ECT 模块发出PWM 波,驱动直流电机及舵机对智能车进行速度控制和转向控制,为了精确控制赛车的速度,在智能车后轴上安装光电编码器,采集车轮转速的脉冲信号,经MCU 捕获后进行PID 自动控制,完成智能车速度的闭环控制。设计中应注意的原则:重心尽可能低、体积尽可能小、驱动尽可能大、结构尽可能简单。
1.2系统整体结构
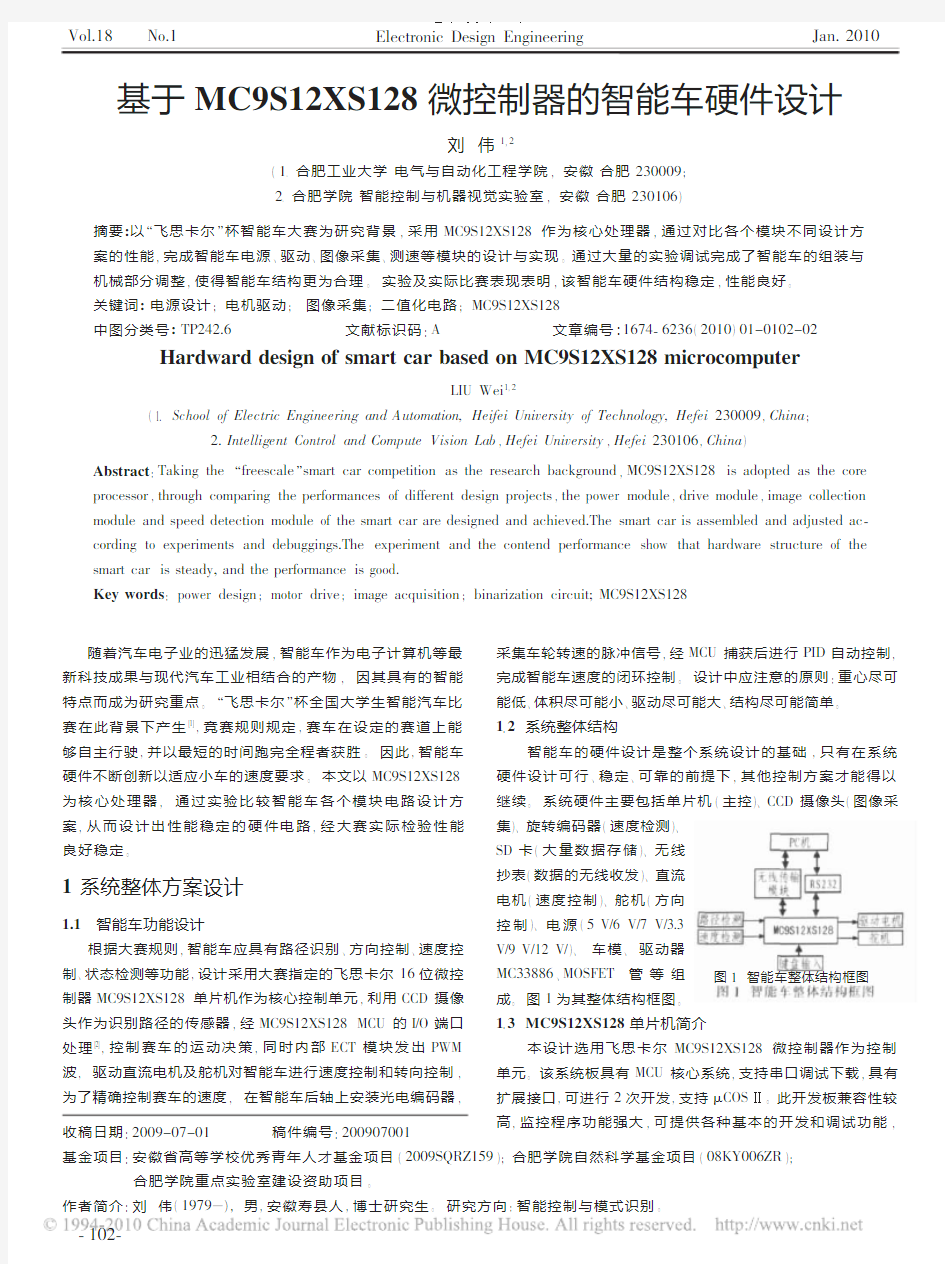
智能车的硬件设计是整个系统设计的基础,只有在系统硬件设计可行、稳定、可靠的前提下,其他控制方案才能得以继续。系统硬件主要包括单片机(主控)、CCD 摄像头(图像采集)、旋转编码器(速度检测)、
SD 卡(大量数据存储)、无线
抄表(数据的无线收发)、直流电机(速度控制)、舵机(方向控制)、电源(5V/6V/7V/3.3
V/9V/12V/)、车模、驱动器MC33886、MOSFET 管等组
成。图1为其整体结构框图。
1.3MC9S12XS128单片机简介
本设计选用飞思卡尔MC9S12XS128微控制器作为控制单元。该系统板具有MCU 核心系统,支持串口调试下载,具有扩展接口,可进行2次开发,支持μCOS Ⅱ。此开发板兼容性较高,监控程序功能强大,可提供各种基本的开发和调试功能,
基于MC9S12XS128微控制器的智能车硬件设计
刘伟1,2
(1.合肥工业大学电气与自动化工程学院,安徽合肥230009;
2.合肥学院智能控制与机器视觉实验室,安徽合肥230106)
摘要:以“飞思卡尔”杯智能车大赛为研究背景,采用MC9S12XS128作为核心处理器,通过对比各个模块不同设计方案的性能,完成智能车电源、驱动、图像采集、测速等模块的设计与实现。通过大量的实验调试完成了智能车的组装与机械部分调整,使得智能车结构更为合理。实验及实际比赛表现表明,该智能车硬件结构稳定,性能良好。关键词:电源设计;电机驱动;图像采集;二值化电路;MC9S12XS128中图分类号:TP242.6
文献标识码:A
文章编号:1674-6236(2010)01-0102-02
Hardward design of smart car based on MC9S12XS128microcomputer
LIU Wei 1,2
(1.School of Electric Engineering and Automation,Heifei University of Technology,Hefei 230009,China ;
2.Intelligent Control and Compute Vision Lab ,Hefei University ,Hefei 230106,China )
Abstract :Taking the “freescale ”smart car competition as the research background ,MC9S12XS128is adopted as the core processor ,through comparing the performances of different design projects ,the power module ,drive module ,image collection module and speed detection module of the smart car are designed and achieved.The smart car is assembled and adjusted ac -cording to experiments and debuggings.The experiment and the contend performance show that hardware structure of the smart car is steady,and the performance is good.
Key words :power design ;motor drive ;image acquisition ;binarization circuit;MC9S12XS128
图1智能车整体结构框图
2010年1月Jan.2010
第18卷第1期
Vol.18No.1
电子设计工程
Electronic Design Engineering
如程序的下载和运行、断点设置、内存显示等。还可利用MC9S12XS128的Flash在线编程技术实现在线写入用户程序和随时修改Flash存储内容。同时在线实时仿真和监测自编程序。根据实际设计需要分配控制器内部单元,如表1所示。
2各功能模块的设计与实现
智能车硬件系统主要包括电源、电机驱动、测速、舵机、图像采集与处理等部分。
2.1电源模块设计
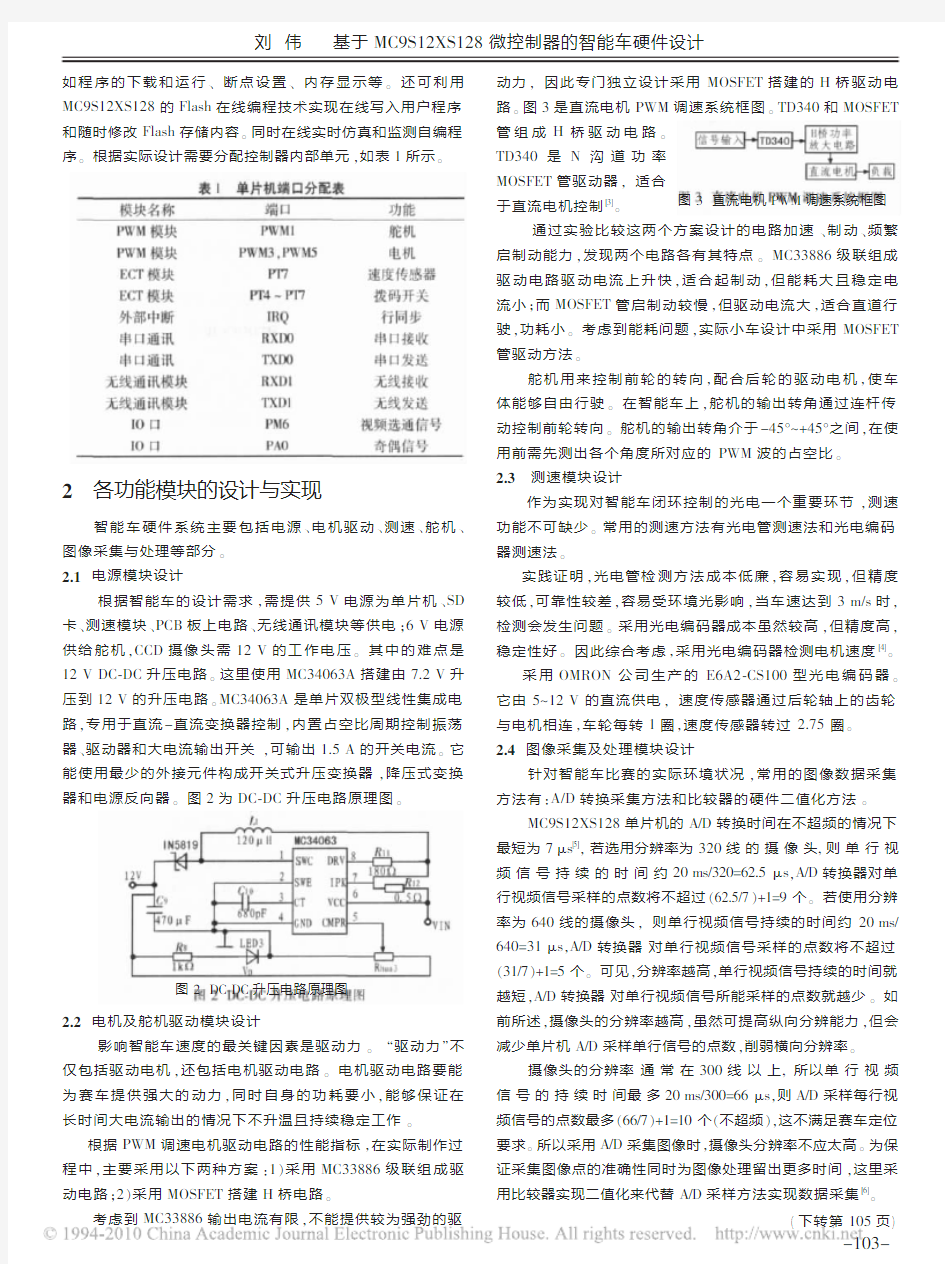
根据智能车的设计需求,需提供5V电源为单片机、SD 卡、测速模块、PCB板上电路、无线通讯模块等供电;6V电源供给舵机,CCD摄像头需12V的工作电压。其中的难点是12V DC-DC升压电路。这里使用MC34063A搭建由7.2V升压到12V的升压电路。MC34063A是单片双极型线性集成电路,专用于直流-直流变换器控制,内置占空比周期控制振荡器、驱动器和大电流输出开关,可输出1.5A的开关电流。它能使用最少的外接元件构成开关式升压变换器,降压式变换器和电源反向器。图2为DC-DC升压电路原理图。
2.2电机及舵机驱动模块设计
影响智能车速度的最关键因素是驱动力。“驱动力”不仅包括驱动电机,还包括电机驱动电路。电机驱动电路要能为赛车提供强大的动力,同时自身的功耗要小,能够保证在长时间大电流输出的情况下不升温且持续稳定工作。
根据PWM调速电机驱动电路的性能指标,在实际制作过程中,主要采用以下两种方案:1)采用MC33886级联组成驱动电路;2)采用MOSFET搭建H桥电路。
考虑到MC33886输出电流有限,动力,因此专门独立设计采用MOSFET搭建的H桥驱动电路。图3是直流电机PWM调速系统框图。TD340和MOSFET 管组成H桥驱动电路。
TD340是N沟道功率
MOSFET管驱动器,适合
于直流电机控制[3]。
通过实验比较这两个方案设计的电路加速、制动、频繁启制动能力,发现两个电路各有其特点。MC33886级联组成驱动电路驱动电流上升快,适合起制动,但能耗大且稳定电流小;而MOSFET管启制动较慢,但驱动电流大,适合直道行驶,功耗小。考虑到能耗问题,实际小车设计中采用MOSFET 管驱动方法。
舵机用来控制前轮的转向,配合后轮的驱动电机,使车体能够自由行驶。在智能车上,舵机的输出转角通过连杆传动控制前轮转向。舵机的输出转角介于-45°~+45°之间,在使用前需先测出各个角度所对应的PWM波的占空比。
2.3测速模块设计
作为实现对智能车闭环控制的光电一个重要环节,测速功能不可缺少。常用的测速方法有光电管测速法和光电编码器测速法。
实践证明,光电管检测方法成本低廉,容易实现,但精度较低,可靠性较差,容易受环境光影响,当车速达到3m/s时,检测会发生问题。采用光电编码器成本虽然较高,但精度高,稳定性好。因此综合考虑,采用光电编码器检测电机速度[4]。
采用OMRON公司生产的E6A2-CS100型光电编码器。它由5~12V的直流供电,速度传感器通过后轮轴上的齿轮与电机相连,车轮每转1圈,速度传感器转过2.75圈。
2.4图像采集及处理模块设计
针对智能车比赛的实际环境状况,常用的图像数据采集方法有:A/D转换采集方法和比较器的硬件二值化方法。
MC9S12XS128单片机的A/D转换时间在不超频的情况下最短为7μs[5],若选用分辨率为320线的摄像头,则单行视频信号持续的时间约20ms/320=62.5μs,A/D转换器对单行视频信号采样的点数将不超过(62.5/7)+1=9个。若使用分辨率为640线的摄像头,则单行视频信号持续的时间约20ms/ 640=31μs,A/D转换器对单行视频信号采样的点数将不超过(31/7)+1=5个。可见,分辨率越高,单行视频信号持续的时间就越短,A/D转换器对单行视频信号所能采样的点数就越少。如前所述,摄像头的分辨率越高,虽然可提高纵向分辨能力,但会减少单片机A/D采样单行信号的点数,削弱横向分辨率。
摄像头的分辨率通常在300线以上,所以单行视频信号的持续时间最多20ms/300=66μs,则A/D采样每行视频信号的点数最多(66/7)+1=10个(不超频),这不满足赛车定位要求。所以采用A/D采集图像时,摄像头分辨率不应太高。为保证采集图像点的准确性同时为图像处理留出更多时间,这里采用比较器实现二值化来代替A/D采样方法实现数据采集[6]。
图2DC-DC升压电路原理图
图3直流电机PWM调速系统框图
(下转第105页)刘伟基于MC9S12XS128微控制器的智能车硬件设计
3结论
围绕MC9S12XS128单片机完成全国智能车大赛小车的硬件电路设计。通过实验比较各个模块电路的特点,选择性能较好的方案。通过硬件二值化电路完成对CCD摄像头图像采集与二值化的处理,节约了微处理的时间。通过比较常用的两种驱动电路的性能,选择出适合智能车竞赛的电路。实验表明整个小车驱动性能良好,图像采集快速,行驶稳定。该智能车在智能车大赛中表现良好。
参考文献:
[1]飞陈放,.
报告[R].上海,2008.
[2]王威.HCS12微控制器原理及应用[M].北京:北京航空航
天大学出版社,2005.
[3]伊永峰,杨勇,张立勋.TD340芯片在直流调速系统中的
应用[J].电子设计工程,2004,12(3):48-49.
[4]王明顺,沈谋全.虚拟编码器在智能车上的应用[J].电子产
品世界,2004,12(2):126-128.
[5]安鹏,马伟.S12单片机模块应用及程序下载调试[J].电子
产品世界,2006,211(07S):162-163.
[6]蔡波.视频实时图像处理系统研究及设计[J].电视技术,
2005,527523-25.
3SPR4096模块电路设计
针对存储器SPR4096,结合开发的简易烧写器,该烧写器配合PC机ResWriter工具(针对SPR4096开发的专用软件工具),通过EZ-probe下载线完成对SPR4096型存储器的擦除、写入、校验等功能。SPR4096的引脚SCK和SDA与支持SIO协议的SPCE061A单片机的IO端口IOB0和IOB1对应,实现SPR4096与单片机SPCE061A间的通信。SPR4096通过ResWriter工具对SPR4096存储器实现擦除、写入以及校验功能,方便地与单片机连接组成外扩存储器的系统。图3为SPR4096模块电路原理图。
4系统软件设计
本设计主要面向西藏地区的公交车,所以,藏、汉、英3种语音是必须考虑的。主程序是一个封闭的循环。IO端口初始化部分主要按照硬件资源分配对IO端口的状态进行初始设置,包括IO端口状态是处于
输入还是输出状态,是否设置上拉
等操作,这些都在IO端口初始化
子函数中完成。液晶初始化主要是
设置液晶显示部分的相关数据线、
控制线的状态。SPR4096初始化用
于设置串行传输速率以及CPU时
钟频率和相对应的IO端口的状
态。计时程序初始化用于打开计时
中断,一些与控制相关的全局变量
初始化也在该子函数中完成。主程
序流程如图4所示。
5结论
当系统工作在正常放电模式时,测试主控板消耗电流,在播报语音时主控板消耗的电流,最终测试结果:主控板消耗电流40.26mA;语音播放时系统消耗电流400mA。该电路能够稳定工作在直流5~7V的电源下,按键工作灵敏度高,系统响应速度快,语音采用SPY0030作为第1级放大,噪声滤除效果好,最终输出音色和音质都能满足实际需要。本系统将为西藏地区公交报站系统的信息化、人性化提供一个较好的解决方案,具有一定的推广前景。
参考文献:
[1]张大波.嵌入式系统原理、设计与应用[M].北京:机械工业
出版社,2004.
[2]韦东山.嵌入式Linux应用开发[M].北京:人民邮电出版
社,2009.
[3]张培仁,张志坚,高修峰.十六位单片微处理器原理及应
用[M].北京:清华大学出版社,2008.
[4]罗亚非.凌阳16位单片机应用基础[M].北京:北京航空航
天大学出版社,2006.
[5]康华光.电子技术基础模拟部分[M].5版.北京:高等教育出
版社,2006.
[6]杨素行.模拟电子技术基础简明教程[M].2版.北京:高等教
育出版社,2004.
图2系统硬件总体设计框图
图3SPR4096模块电路原理图
图4主程序流程
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(上接第103页)
李书荣,等基于SPR4096的藏、英、汉三语公交报站系统设计