第六章-轮系计算题专项训练(附答案)教学文案

第六章轮系计算题专项训练(答案)
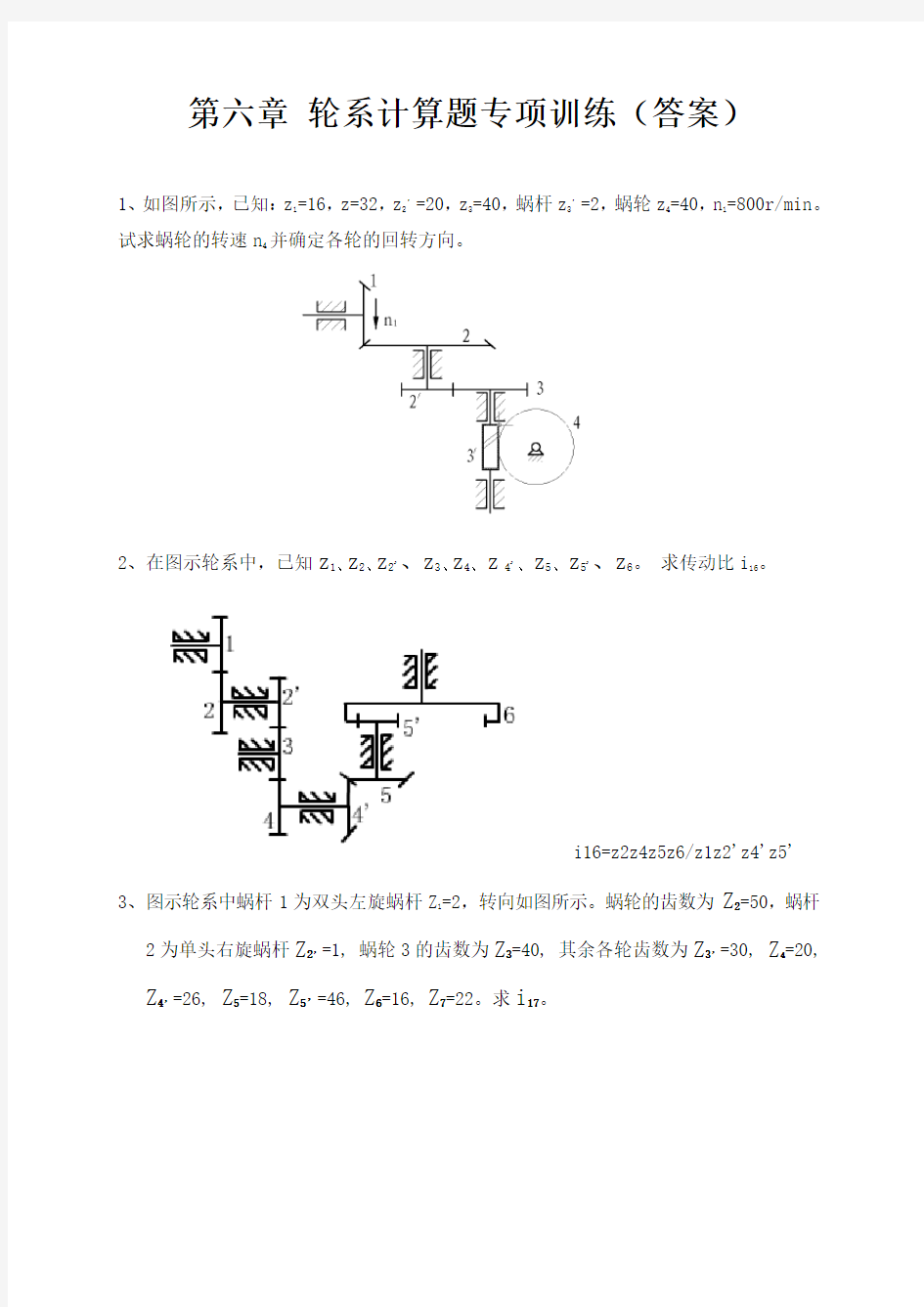
1、如图所示,已知:z
1=16,z=32,z
2
,=20,z
3
=40,蜗杆z
3
,=2,蜗轮z
4
=40,n
1
=800r/min。
试求蜗轮的转速n
4
并确定各轮的回转方向。
2、在图示轮系中,已知z1、z2、z2'、z
3、z
4、z4'、z
5、z5'、z6。求传动比i16。
i16=z2z4z5z6/z1z2'z4'z5'
3、图示轮系中蜗杆1为双头左旋蜗杆Z
1
=2,转向如图所示。蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40, 其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。求i17。
i17=Z2Z3Z4Z5Z6Z7/Z1Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26*46= 220.7 4、在习题图8所示的轮系中,已知z 1=15 , z 2=25 , z 2’=15 , z 3=30 , z 3’=15 , z 4=30, z 4’=2 , z 5=60, 若n 1=500 r/min ,求齿轮5转速的大小和方向。
(n 5=2.5 r/min , 顺时针)
2002
15151560
3030254534231251=??????=='''z z z z z z z z n n ,)/(5.2200
500
20015m r n n ===
;齿轮5的方向可以画箭头确定。
5、在图示轮系中,已知z 1、z 2、z 2'、z 3、z 4、 z 4'、
z 5、 z 5'
、z 6。 求传动比i 16。
6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。试计算轮系的传动比15i 并确定齿轮5的转动方向。
7、 在如图所示的轮系中,已知Z 1 =2(右旋),Z 2=60,Z 3=15,Z 4=30,Z 5=15,
Z 6=30,求: (1)该轮系的传动比i 16 =?
(2)若n 1=1200 r / min ,求轮6的转速大小和方向?
8、图示为一蜗杆传动的定轴轮系,已知蜗杆转速 n1=750r/min ,Z1=3,Z2=60,Z3=18,Z4=27,Z5=20,Z6=50,试用画箭头的方法确定Z6的转向,并计算其转速。
9、图示为卷扬机传动示意图,悬挂重物G的钢丝绳绕在鼓轮5上,鼓轮5与蜗轮 4 联接在一起。已知各齿轮的齿数,Z1 =20,Z2 =60,Z3=2(右旋),Z4=120。试求:
①轮系的传动比i1,4
②若重物上升,加在手把上的力应使轮1如何转动?
10、机械传动系统如图所示,根据图示参数和信息,求运动链末端构件的运动速度或行程并标明其运动方向。(a. n6=26.1r/min,b. n4=7r/min,c. 手柄每转行程:l=2.22mm)
复合场练习题(含答案)
一、解答题 1.如图,静止于A处的离子,经加速电场加速后沿图中圆弧虚线通过静电分析器,从P点垂直CN进入矩形区域的有 界匀强电场,电场方向水平向左。静电分析器通道有均匀辐射分布的电场,已知圆弧虚线的半径为R,其所在处场强 为E、方向如图所示;离子质量为m、电荷量为q;、,离子重力不计。 (1)求加速电场的电压U; (2)若离子恰好能打在Q 点上,求矩形区域QNCD匀强电场场强E0的值; (3)若撤去矩形区域QNCD的匀强电场,换为垂直纸面向里的匀强磁场,要求离子能最终打在QN上,求磁场磁感 应强度B的取值围。 2.如图所示,虚线框为某两级串列加速器原理图,abc为长方体加速管,加速管底面宽度为d,加速管的中部b处有很高的 正电势,a、c两端均有电极接地(电势为零),加速管出口c右侧距离为d处放置一宽度为d的荧光屏.现让大量速度很小(可 认为初速度为零)的负一价离子(电荷量为-e)从a端进入,当离子到达b处时,可被设在b处的特殊装置将其电子剥离,成 为三价正离子(电荷量为+3e),而不改变其速度大小.这些三价正离子从c端飞出后进入与其速度方向垂直的、磁感应强 度为B的匀强磁场中,其中沿加速管中轴线进入的离子恰能打在荧光屏中心位置,离子质量为m,不计离子重力及离子间 相互作用力. (1) 求离子在磁场中运动的速度v的大小. (2) 求a、b两处的电势差U. (3) 实际工作时,磁感应强度可能会与设计值B有一定偏差,若进入加速器的离子总数为N,则磁感应强度为0.9B时有多 少离子能打在荧光屏上? 3.目前世界上正在研究的一种新型发电机叫磁流体发电机,如图所示是它的发电原理:将一束等离子体(即高温下 电离的气体,含有足够多带正电和负电的微粒,整体呈中性),喷射入磁场,磁场中有两块平行金属板A、B,这时 金属板上就会聚集大量电荷,产生电压.设平行金属板A、B长为a、宽为b,两板间距为d,其间有匀强磁场,磁 感应强度为B,等离子体的流速为v,电阻率为ρ,外接一个负载电阻,等离子体从一侧沿垂直磁场且与极板平行方 向射入极板间. (1)从两个角度推导发电机电动势的表达式E=Bdv; (2)若负载电阻为可变电阻,请证明当负载电阻等于发电机的阻时,发电机的输出功率最大,并求发电机的最大输 出功率Pm; (3)若等离子体均为一价离子,外接一个负载电阻为R,电荷量为e,每秒钟有多少个离子打在A极板上? 4.如图所示,是磁流体动力发电机的工作原理图.一个水平放置的上下、前后封闭的矩形塑料管,其宽度为a,高 度为b,其充满电阻率为ρ的水银,由涡轮机产生的压强差p使得这个流体具有恒定的流速v0.管道的前后两个侧面 上各有长为L的由铜组成的面,实际流体的运动非常复杂,为简化起见作如下假设: a.尽管流体有粘滞性,但整个横截面上的速度均匀; b.流体的速度总是与作用在其上的合外力成正比; c.导体的电阻:R=ρl/S,其中ρ、l和S分别为导体的电阻率、长度和横截面积; d.流体不可压缩. 若由铜组成的前后两个侧面外部短路,一个竖直向上的匀强磁场只加在这两个铜面之间的区域,磁感强度为B(如图). (1)写出加磁场后,两个铜面之间区域的电阻R的表达式 (2)加磁场后,假设新的稳定速度为v,写出流体所受的磁场力F与v关系式,指出F的方向 (3)写出加磁场后流体新的稳定速度v的表达式(用v0、p、L、B、ρ表示); (4)为使速度增加到原来的值v0,涡轮机的功率必须增加,写出功率增加量的表达式(用v0、a、b、L、B和ρ表示)。
轮系及其设计习题解答样本
32'1 O 12 3'O 3 O 4 4O 2 第六章 齿轮系及其设计习题解答 6.1 在图示手摇提高装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提高重物时手柄转向。 解:2001 152040305053164216=????==z z z z z z i 方向:从左往右看为顺时针方向。 题 6.1 图 题 6.2 图 6.2 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z ,404=z 。试求:(1)传动比i 14;(2)如要变更i 14符号,可采用什么办法? 解: (1) 620 202040304032143214-=????==''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头办法判断,又轮4轴线与轮1平行,通过画箭头判断轮4和轮1转向相反,故在传动比前加“—” (2)如要变更i 14符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一种惰轮。 6.3 在图示机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针传动比SM i 和分针与时针传动比MH i 。 解: 该轮系为平面定轴轮系,故有
60886460)1(463524664=??=-====z z z z n n i n n i M S SM 12682424)1(11912102129912=??=-==== z z z z n n i n n i H M MH 题 6.3 图 题 6.4 图 6.4 图示为一滚齿机工作台传动机构,工作台与蜗轮5固联。已知:2011=='z z ,352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一种齿数325='z 齿轮, 试求挂轮组齿数比42z z '。 解:该轮系为空间定轴轮系,故有 120503524432154325115????==='''z z z z z z z z z z n n i =??=== ''''''120322861575151z z z z n n i 又 5115''=i i 联立解得:64 125z 42='z 6.5 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z ,24='z (右旋蜗杆 ),605=z ,205='z ,齿轮模数2=m mm ,若m in 10001r n =(方向如图所示),求齿条6线速度υ大小和方向。
最新机械基础轮系练习题
XXXXX学校《机械基础》练习题 一、填空题 1.由一系列相互啮合齿轮所构成的传动系统称为_________. 2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类. 3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______. 4.轮系中,既有定轴轮系又有行星轮系的称为________. 5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动.6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示. 7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比. 8.在各齿轮轴线相互平行的轮系中,若齿轮的外啮合对数是偶数,则首轮与末轮的转向_______;若为奇数,则首轮与末轮的转向__________. 9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合. 10.在轮系中,末端件若是齿轮齿条,它可以把主动件的________运动变为齿条的______运动. 11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动. 12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n次方,n表示 ________.若(-1) 的n次方为正,则首、末两轮转向____. 13.定釉轮系中任一从动件的转速计算公式为______________________. 14.定轴轮系末端通常有下列三种传动形式,则末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________ 二、单选题 1.若齿轮与轴之间( ),则齿轮与轴各自转动,互不影响. A.空套 B.固定 c.滑移 D.空间配合 2.如图所示的轮系中,设已知Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′与5同轴线,试求传动比i15。( ) A.3 B.6 C.9 D. 12 3.汽车后桥传动轴部分组成的轮系为( ) A.平面定轴轮系 B.空间定轴轮系 c.周转轮系 D.都有可能 4.定轴轮系传动比大小与轮系中惰轮的齿数 ( ) A.无关 B.有关,成正比 C.有关,成反比D.有关,不成比例 5.若主动轴转速为1 200 r/min,若要求从动轴获得12 r/min的转速,应采用( )传动. A. -对直齿圆柱齿轮 B.链 c.轮系 D.蜗轮蜗杆6.关于轮系的说法,正确的是 ( ) A.所有机械传动方式中,轮系的传动比最大 B.轮系靠惰轮变速,靠离合器变向 C.周转轮系只能实现运动的合成与分解 D.轮系的传动比,是构成该轮系所有机械传动方式传动叱的连乘积 7.在轮系中,两齿轮间若增加( )个惰轮时,首、末两轮的转向相同. A.奇数 B.偶数 c.任意数 D.以上都可以 8.轮系的末端是螺旋传动,已知末端轴转速行n=80 r/min,三线螺杆的螺距为4 mm,则螺母每分钟移动距离为( )mm. A. 240 B.320 C.960 D. 160 9.轮系的末端是齿轮齿条传动,已知小齿轮的模数,m=3 mm,齿数z=25,末轴转速n=75r/mln,则齿条每分钟移动的距离为( )mm. A.17662.5 B.5625 C.5887.5 D.8331 10.如图所示轮系,Ⅳ轴可得到几种转速( ) A.3种 B.6种 C.9种 D.12种 三、计算题 1.如图所示为多刀半自动车床主轴箱传动系统.已知带轮直径D1=D2-=180 mm,z1=45,z2=72,z3=36,z4 =81,z5 =59,z6 =54,z7=25,z8=88.试求当电动机转速n=1443 r/min时,主轴Ⅲ的各级转速.
经典复合场练习题
电场与磁场 模型1:偏转电场与偏转磁场 1如图所示,在矩形ABCD 区域内,对角线BD 以上的区域存在有平行于AD 向下的匀强电场,对角线BD 以下的 区域存在有垂直于纸面的匀强磁场(图中未标出),矩形AD 边长为L ,AB 边长为2L.一个质量为m 、电荷量为+ q 的带电粒子(重力不计)以初速度v0从A 点沿AB 方向进入电场,在对角线BD 的中点P 处进入磁场,并从DC 边上以垂直于DC 边的速度离开磁场(图中未画出),求: (1) 带电粒子经过P 点时速度v 的大小和方向; (2) 电场强度E 的大小; (3) 磁场的磁感应强度B 的大小和方向. 2在如图所示的x o y --坐标系中,0y >的区域内存在着沿y 轴正方向、场强为E 的匀强电场,0y <的区 域内存在着垂直纸面向里、磁感应强度为B 的匀强磁场.一带电粒子从 y 轴上的(0,)P h 点以沿x 轴正方向的初速度射出,恰好能通过x 轴上的 (,0)D d 点.己知带电粒子的质量为m ,带电量为q -.h d q 、、均大于0.不计重力的影响. (1)若粒子只在电场作用下直接到达D 点,求粒子初速度的大小 0v ; (2)若粒子在第二次经过x 轴时到达D 点,求粒子初速度的大小 0v (3)若粒子在从电场进入磁场时到达D 点,求粒子初速度的大小0v ; 3如图,与水平面成45°角的平面MN 将空间分成I 和II 两个区域。一质量为m 、电荷量为q (q >0)的粒子以 速度0v 从平面MN 上的0p 点水平右射入I 区。粒子在I 区运动时,只受到大小不变、方向竖直向下的电场作用, 电场强度大小为E ;在II 区运动时,只受到匀强磁场的作用,磁感应强度大小为B ,方向垂直于纸面向里。求粒 子首次从II 区离开时到出发点 0p 的距离。粒子的重力可以忽略。 4如图所示,xoy 平面内存在着沿y 轴正方向的匀强电场,一个质量为m 、电荷量为+q 的粒子从坐标原点O 以速度v0沿x 轴正方向开始运动。当它经过图中虚线上的(23,)M L L 点时,撤去电场,粒子继续运动一段时间进入一个矩形匀强磁场区域(图中未画出),后又从虚线上的某一位置N 处沿y 轴负方向运动并再次经过M 点,已知磁场方向垂直xOy 平面向里,磁感应强度大小为B ,不计粒子的重力。求: (1)电场强度的大小; (2)N 点的坐标; (3)矩形磁场的最小横截面积。
机械设计基础练习题A
机械设计基础练习题A 一、选择题 1. 非周期性速度波动。 A. 用飞轮调节 B. 用调速器调节 C. 不需要调节 D. 用飞轮和调速器双重调节 2. 渐开线标准齿轮的根切现象,发生在。 A. 模数较大时 B. 模数较小时 C. 齿数较少时 D. 齿数较多时 3. 标准斜齿圆柱齿轮传动中,查取齿形系数Y F数值时,应按。 A. 法面模数m n B. 齿宽b C. 实际齿数Z D. 当量齿数Z v 4.带传动的打滑现象首先发生在。 A.大带轮上 B.小带轮上 C.主动轮上 D.从动轮上 5. 带传动在工作时产生弹性滑动,是由于。 A. 包角α1太小 B. 初拉力F0太小 C. 紧边与松边拉力不等 D. 传动过载 6. 在一定转速下、要减轻滚子链传动的不均匀性和动载荷,应该。 A. 增大节距P和增加齿数Z1 B. 增大节距P和减小齿数Z1 C. 减小节距P和减小齿数Z1 D. 减小节距P和增加齿数Z1 7. 转轴弯曲应力σb的应力循环特性为。 A. r=-1 B. r=0 C. r= +1 D. -1 教案首页 科目:机械基础(第四版) 授课班级:08级模具(1)班 授课地点:多媒体教室(一)室 课时:2课时 课题:§6—2 定轴轮系的传动比 授课方式:讲授 教学容:定轴轮系的传动比及其计算举例 教学目标:能熟练进行定轴轮系传动比的计算方法及各轮回转方向的判定 选用教具:三角板、圆规、平行轴定轴轮系模型、非平行轴定轴轮系模型 教学方法:演示法、循序渐进教学法、典型例题法 第一部分:教学过程 一、复习导入新课(约7分钟) (一)组织教学(2分钟) 学生点名考勤,课前6S检查,总结表扬上次优秀作业学生,调节课堂气氛,调动学生主动性。 (二)教学回顾(2分钟) 1、什么是轮系? 2、轮系有什么应用特点? 3、轮系的分类依据是什么?可分为哪几类? 4、什么是定轴轮系?(让学生回顾上次课的容) (三)复习,新课导入(2分钟) 演示减速器、车床主轴箱、钟表机构等,我们看到的这些都是定轴轮系的应用,请问:我们生活中常见钟表里的时针走一圈,分针走了12圈,秒针走了720圈,那么由时针到秒针是如何实现传动的?时针把运动传到秒针时,其转速大小有何变化?具体比值如何确定? (四)教学容介绍(1分钟) 重点:定轴轮系的传动路线的分析、传动比的计算及各轮回转方向的判定。 难点:非平行轴定轴轮系传动比公式推导及各轮回转方向的判定。 二、新课讲解(约32分钟) (一)定轴轮系的传动比概念(2分钟) 教师先展示定轴轮系模型,引导学生参与到演示教学中来,通过一对齿轮的传动比概念,教师提出问题:定轴轮系的传动比是否就是输入轴的转速与输出轴的转速之比?引发学生思考。演示得出定轴轮系的概念:定轴轮系的传动比是指首末两轮的转速之比。 (二)知识分解(12分钟) 对于定轴轮系,我们不但要能求出传动比的大小,还要能确定末轮的回转方向。如车床主轴箱,我们知道了电动机的转速和旋转方向,主轴的转速和旋转方向从何而得?因此,我们先把定轴轮系分解为各对齿轮副,如果知道了各对齿轮副的传动比大小和回转方向,那总的传动比大小和末轮的回转方向就不得而知了。 1、齿轮副的作图 讲解轴承与固定齿轮的作图表示法,引出、外啮合圆柱齿轮副、圆锥齿轮副、蜗轮蜗杆副和齿轮齿条的作图。 2、齿轮副的传动比和回转方向(重点容) (1)一对圆柱齿轮: ①传动比i :外啮合:i = 1 2 2 1 z z n n -=;啮合: i = 12 21z z n n +=。 ②回转方向:a 、用传动比表示:i 的结果为正值,表示两轮的回转方向相同;为负值,表示回转方向相反。b 、用箭头表示:用相同指向的箭头表示回转方向相同;相反指向的箭头表示回转方向相反。(口诀:外改同) (2)一对圆锥齿轮: ①传动比i :i = 1 22 1 z z n n = 。②回转方向:只能用箭头表示,箭头应同时指向或同时背离 啮合点。(口诀:同时指向或背离) (3)蜗杆蜗轮副: ①传动比i :i = 1 22 1 z z n n = 。(口诀:左旋左,右旋右) ②回转方向:只能用箭头表示,左旋用左手,右旋用右手。 (三)知识组合(18分钟) 1、定轴轮系的作图 定轴轮系是由各齿轮副连接而成的,对于它的作图,只要把各齿轮副拼连而成即可。 2、定轴轮系传动比的计算 1) 分析轮系的组成: 福建专升本复习资料(二) 轮系计算 1. z z z试求在同一时间内当构件 1和 3 的转数分别为 n n设 2. 在图示的轮系中,设 1= 2=30,3=90,1=1, 3=-1(逆时针为正 )时, nH 及 i1H 的值。 3.图示为一电动卷扬机的减速器运动简图,已知各轮齿数 ,试求 : 传动比 i15。 4.在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:Z1=30, Z2=Z2’ =35,Z3=90, Z4=60,求传动比i14。 5.在图示轮系中,已知:Z1=22,Z 3=88,Z 3’=Z 5,试求传动比 i15。 6.图示为双螺旋桨飞机的减速器中,已知:Za=26,Z b=66,Zg=20,Za’=30,Zg’= 18,Zb’=66,若na=15000rpm时,求 np 及 nQ 的大小及转向。 7.图示为一种大速比减速器的示意图 , 动力由齿轮 1 处输入 , H 处输出 .已知各轮齿数为 :Z1=12, Z2=48, Z3=72, Z2’ =48,Z3’ =96,Z4=12, 试求传动比 i1H 。 8.如图所示轮系机构中,已知:Z 2=Z 5=30,Z 2’= 22.各齿轮模数均相同,试求传动比 i54。 9.图示为用于自动化照明灯具上的轮系,已知输入轴转速 n1=19.5rpm, 各轮的齿数分别为:Z1=60,Z2=Z 2’=30,Z 3=Z 4=40,Z 5=120,试求箱体的转速? 10. 图示的轮系中,已知各轮齿数为Z1=60,Z 2=20,Z 2’=20,Z 3=Z 4= 20,Z 5=100,试求 传动比 i41? 11. 在图示的混合轮系中,已知Z 1=Z 5’=1,Z 3=99,Z 4’= 101,Z 2=Z 4=Z 5=Z 6=100,各轮的模数相同,压力角相等.求: 1、i16 2、若 w1 顺时针方向转动,那么 w 6的转向如何? 3、回归轮系, 3- 4- 4’ -5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归 轮系既要满足同心条件,又要保证实现标准齿轮传动应采用什么方法? 4、若已知蜗杆 1,蜗轮 2 组成的传动中,它们的模数 m =2mm,蜗杆特性系数 q=13, 那么蜗杆、蜗轮传动 的中心距 a12=? 12. 图示轮系中蜗杆 1 为双头左旋蜗杆 Z 1=2,转向如图所示。蜗轮的齿数为 Z 2=50,蜗杆 2 为单头右 旋蜗杆 Z 2’ 蜗轮 3 的齿数为 3 =40, 其余各轮齿数为 3’44’55’6 =1, Z Z =30, Z =20, Z =26, Z =18, Z =46, Z =16, Z =22。求 i 。 7 17 13. 在图示传动系统中,件 1、 5 为蜗杆,件 2、 6 为蜗轮,件 3、4 为斜齿轮,件 7、 8 为锥齿轮。已知蜗杆 1 为主动,要求输出轮 8 的回转方向如图示。试确定: 1)各轴的回转方向(画在图上) ; 2)考虑Ⅰ、Ⅱ、Ⅲ轴上所受轴向力能抵消一部分, 定出各轮的螺旋线方向(画在图上) ; 3)画出各轮的轴向力的方向,并画出轮 4 所受的力。 一、带电粒子在复合场中的运动专项训练 1.如图所示,直径分别为D 和2D 的同心圆处于同一竖直面内,O 为圆心,GH 为大圆的水平直径。两圆之间的环形区域(Ⅰ区)和小圆内部(Ⅱ区)均存在垂直圆面向里的匀强磁场.间距为d 的两平行金属极板间有一匀强电场,上极板开有一小孔.一质量为m 、电量 为+q 的粒子由小孔下方 2 d 处静止释放,加速后粒子以竖直向上的速度v 射出电场,由H 点紧靠大圆内侧射入磁场。不计粒子的重力。 (1)求极板间电场强度的大小; (2)若粒子运动轨迹与小圆相切,求Ⅰ区磁感应强度的大小; (3)若Ⅰ区、Ⅱ区磁感应强度的大小分别为2mv qD 、 4mv qD ,粒子运动一段时间后再次经过H 点,求这段时间粒子运动的路程. 【来源】2015年全国普通高等学校招生统一考试物理(山东卷带解析) 【答案】(1)2 mv qd (2)4mv qD 或43mv qD (3)5.5πD 【解析】 【分析】 【详解】 (1)粒子在电场中,根据动能定理2 122 d Eq mv ?=,解得2mv E qd = (2)若粒子的运动轨迹与小圆相切,则当内切时,半径为 /2 E R 由2 1 1 v qvB m r =,解得4mv B qD = 则当外切时,半径为 e R 由2 12 v qvB m r =,解得43mv B qD = (2)若Ⅰ区域的磁感应强度为220932qB L m U =,则粒子运动的半径为00 10016819 U U U ≤≤;Ⅱ 区域的磁感应强度为20 12qU mv =,则粒子运动的半径为 2 v qvB m r =; 设粒子在Ⅰ区和Ⅱ区做圆周运动的周期分别为T 1、T 2,由运动公式可得: 1112R T v π= ;03 4 r L = 据题意分析,粒子两次与大圆相切的时间间隔内,运动轨迹如图所示,根据对称性可知,Ⅰ区两段圆弧所对的圆心角相同,设为1θ,Ⅱ区内圆弧所对圆心角为2θ,圆弧和大圆的两 个切点与圆心O 连线间的夹角设为α,由几何关系可得:1120θ=o ;2180θ=o ; 60α=o 粒子重复上述交替运动回到H 点,轨迹如图所示,设粒子在Ⅰ区和Ⅱ区做圆周运动的时间 分别为t 1、t 2,可得:r U ∝;1056 U L U L = 设粒子运动的路程为s ,由运动公式可知:s=v(t 1+t 2) 联立上述各式可得:s=5.5πD 2.如图,绝缘粗糙的竖直平面MN 左侧同时存在相互垂直的匀强电场和匀强磁场,电场方向水平向右,电场强度大小为E ,磁场方向垂直纸面向外,磁感应强度大小为B .一质量为m 、电荷量为q 的带正电的小滑块从A 点由静止开始沿MN 下滑,到达C 点时离开MN 做曲线运动.A 、C 两点间距离为h ,重力加速度为g . A 卷 一、简答与名词解释(每题5分,共70分) 1. 简述机构与机器的异同及其相互关系 答. 共同点:①人为的实物组合体;②各组成部分之间具有确定的相对运动;不同点:机器的主要功能是做有用功、变换能量或传递能量、物料、信息等;机构的主要功能是传递运动和力、或变换运动形式。相互关系:机器一般由一个或若干个机构组合而成。 2. 简述“机械运动”的基本含义 答. 所谓“机械运动”是指宏观的、有确定规律的刚体运动。 3. 机构中的运动副具有哪些必要条件? 答. 三个条件:①两个构件;②直接接触;③相对运动。 4. 机构自由度的定义是什么?一个平面自由构件的自由度为多少? 答. 使机构具有确定运动所需输入的独立运动参数的数目称机构自由度。平面自由构件的自由度为3。 5. 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况? 答. 机构具有确定运动条件:自由度=原动件数目。原动件数目<自由度,构件运动不确定;原动件数目>自由度,机构无法运动甚至构件破坏。 6. 铰链四杆机构有哪几种基本型式? 答. 三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。 7. 何谓连杆机构的压力角、传动角?它们的大小对连杆机构的工作有何影响?以曲柄为原动件的偏置曲柄滑块机构的最小传动角min γ发生在什么位置? 答. 压力角α:机构输出构件(从动件)上作用力方向与力作用点速度方向所夹之锐角;传动角γ:压力角的余角。α+γ≡900。压力角(传动角)越小(越大),机构传力性能越好。偏置曲柄滑块机构的最小传动角γmin 发生在曲柄与滑块移动导路垂直的位置 8. 什么是凸轮实际轮廓的变尖现象和从动件(推杆)运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免? 答. 对于盘形凸轮,当外凸部分的理论轮廓曲率半径ρ与滚子半径r T 相等时:ρ=r T ,凸轮实际轮廓变尖(实际轮廓曲率半径ρ’=0)。在机构运动过程中,该处轮廓易磨损变形,导致从动件运动规律失真。增大凸轮轮廓半径或限制滚子半径均有利于避免实际轮廓变尖现象的发生。 9. 渐开线齿廓啮合有哪些主要特点? 答. ①传动比恒定;②实际中心距略有改变时,传动比仍保持不变(中心距可分性);③啮合过程中,相啮合齿廓间正压力方向始终不变(有利于传动平稳性)。 10. 试说明齿轮的分度圆与节圆、压力角与啮合角之间的区别,什么情况下会相等(重合)? 答. 分度圆:模数和压力角均取标准值得圆定义为齿轮分度圆;每个齿轮均有一个分度圆;节圆:一对齿轮啮合时、两个相切并相对作纯滚动的圆定义为节圆。只有当一对齿轮啮合时节圆才存在。 压力角:指分度圆上的标准压力角(常取200 );啮合角:一对齿轮啮合时,节圆上 第五章 轮系 题5-1 图示轮系中,已知1轮 转向n 1如图示。各轮齿数为:Z 1=20, Z 2=40,Z 3= 15,Z 4=60,Z 5=Z 6= 18, Z 7=1(左旋蜗杆),Z 8 =40,Z 9 =20 。 若n 1 =1000 r/min ,齿轮9的模数 m =3 mm ,试求齿条10的速度v 10 及 其移动方向(可在图中用箭头标出)。 解题分析: 判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但 有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。 确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画箭头的方法确定。 解答: 1.确定齿条10的速度v 10 大小 ∵ 320118152040186040753186428118=??????=== z z z z z z z z n n i ∴ min /125.3min /3201000 18189r r i n n n === = s /mm .s /mm .n mz n d v v 82960125 320360609999910=???π=π=π= = 2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可 定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑) 题5-2 图示轮系中,已知蜗杆1 Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。要求: (1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ; (2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。 解题分析: 判定轮系类型:因在轮系运转 时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。 确定传动比计算式:空间定轴 轮系的传动比大小仍可用教材(5-1) 式计算,但转向只能用画箭头的方法 确定。 解答: 1.确定蜗轮2、蜗轮3的轮齿 螺旋线方向:根据蜗杆传动正确啮 合条件21βγ= ,32βγ=' ,可确定蜗轮2为左旋,蜗轮3为右旋。 蜗轮2、3转向:根据 蜗轮蜗杆的相对运动关系,确定转向n 2、n 3如题解5-2 图所示。 2.传动比i 17: 7.2962826301218 182040506543217654327117=????????=== ''''z z z z z z z z z z z z n n i 3.7轮的转向:在题5 - 2 图上用画箭头的方法,可定出n 7 的方向朝上(即↑),因 7轮轴线与蜗杆1轴线平行,故也可说n 7与n 1转向相同。 学进辅导高三物理学习资料---带电粒子在电、磁场中的运动 2012-11-17 1.在图所示的坐标系中,x 轴水平,y 轴垂直,x 轴上方空间只存在重力场,第Ⅲ象限存在沿y 轴正方向的匀强电场和垂直xy 平面向里的匀强磁场,在第Ⅳ象限由沿x 轴负方向的匀强电场,场强大小与第Ⅲ象限存在的电场的场强大小相等。一质量为m ,带电荷量大小为q 的质点a ,从y 轴上y=h 处的P 1点以一定的水平速度沿x 轴负方向抛出,它经过x = -2h 处的P 2点进入第Ⅲ象限,恰好做匀速圆周运动,又经过y 轴上方y = -2h 的P 3点进入第Ⅳ象限,试求: ?质点a 到达P 2点时速度的大小和方向; ?第Ⅲ象限中匀强电场的电场强度和匀强磁场的磁感应强度的大小; ?质点a 进入第Ⅳ象限且速度减为零时的位置坐标 解.(2分)如图所示。 (1)质点在第Ⅱ象限中做平抛运动,设初速度为v 0,由 2 12 h gt = ……① (2分) 2h =v 0t …… ② (2分) 解得平抛的初速度 0v = (1分) 在P 2点,速度v 的竖直分量 y v gt == (1分) 所以,v =2gh ,其方向与x 轴负向夹角 θ=45° (1分) (2)带电粒子进入第Ⅲ象限做匀速圆周运动,必有 mg =qE ……③ (2分) 又恰能过负y 轴2h 处,故23P P 为圆的直径,转动半径 R= h h OP 22 222 22 =?= ? …… ④ (1分) 又由 2 v q v B m R = ……⑤ (2分). 可解得 E =mg /q (1分); B = h g q m 2(2分) (3)带电粒以大小为v ,方向与x 轴正向夹45°角进入第Ⅳg ,方向与过P 3点的速度方向相反,故带电粒做匀减速直线运动,设其加速度大小为a ,则: g a m = = …… ⑥ (2分); 由2 22 2,2v O v as s a -=-== =得(2分) 由此得出速度减为0时的位置坐标是(),h h -(1分) 2.如图所示的坐标系,x 轴沿水平方向,y 轴沿竖直方向在x 轴上空间 第一、 第二象限内,既无电场也无磁场,在第三象限,存在沿y 轴正方向的匀强电场和垂直xy 平面(纸面)向里的均强磁场,在第四象限,存在沿y 轴负方向、场强大小与第三象限电场场强相等的匀强电场。一质量为m 、电荷量为q 的带电质点,从y 轴上y =h 处的P 1点以一定的水平初速度沿x 轴负方向进入第二象限。然后经过x 轴上x = -2h 处的P 2点进入第三象限,带电质点恰好能做匀速圆周运动.之后经过y 轴上y = -2h 处的P 3点进入第四象限。已知重力加速度为 g .求: (1)粒子到达P 2点时速度的大小和方向; (2)第三象限空间中电场强度和磁感应强度的大小; (3)带电质点在第四象限空间运动过程中最小速度的大小和方向。 分析和解: (1)参见图,带电质点从P 1到P 2,由平抛运动规律 2 2 1gt h =……①(2分); v 0=2h /t ……②(1分) gt v y =v y =gt ……③(1分) 求出gh v v v y O 22 2 =+= ……④(2分) 一、计算图所示振动式输送机的自由度。 解:原动构件1绕A 轴转动、通过相互铰接的运动构件2、3、4带动滑块5作往复直线移动。构件2、3和4在C 处构成复合铰链。此机构共有5个运动构件、6个转动副、1个移动副,即n =5,l p =7,h p =0。则该机构的自由度为 F =h l p p n --23=07253-?-?=1 二、在图所示的铰链四杆机构中,设分别以a 、b 、c 、d 表示机构中各构件的长度,且设a <d 。如 果构件AB 为曲柄,则AB 能绕轴A 相对机架作整周转动。为此构件AB 能占据与构件AD 拉直共线 和重叠共线的两个位置B A '及B A ''。由图可见,为了使构件AB 能够转至位置B A ',显然各构件的长 度关系应满足 c b d a +≤+ (3-1) 为了使构件 AB 能够转至位置B A '',各构件的长度关系应满足 c a d b +-≤)(或b a d c +-≤)( 即c d b a +≤+ (3-2) 或b d c a +≤+ (3-3) 将式(3-1)、(3-2)、(3-3)分别两两相加,则得 c a ≤ b a ≤ d a ≤ 同理,当设a >d 时,亦可得出 c b a d +≤+ b a b d +≤+ b a c d +≤+ 得c d ≤b d ≤a d ≤ 分析以上诸式,即可得出铰链四杆机构有曲柄的条件为: (1)连架杆和机架中必有一杆是最短杆。 (2)最短杆与最长杆长度之和不大于其他两杆长度之和。 上述两个条件必须同时满足,否则机构中便不可能存在曲柄,因而只能是双摇杆机构。 通常可用以下方法来判别铰链四杆机构的基本类型: (1)若机构满足杆长之和条件,则: ① 以最短杆为机架时,可得双曲柄机构。 机械原理自测题库——分析计算题(共88题) 1、试计算图示机构的自由度(若有复合铰链、局部自由度或虚约束,必须明确指出)。并判断该机构的运动是否确定(标有箭头的机构为原动件)。若其运动是确定的,要进行杆组分析,并显示出拆组过程,指出各级杆组的级别、数目以及机构的级别。 图 a) 图b) 题 1 图 2、计算图示机构自由度,并判定该机构是否具有确定的运动(标有箭头的构件为原动件)。 图 a) 图 b) 题 2 图 3、计算图示机构自由度,并确定应给原动件的数目。 图 a 图b 题 3 图 4、在图示机构中试分析计算该机构的自由度数,若有复合铰链、局部自由度或虚约束,则在图上明确指出。 图a 图b 题 4 图 5、计算图示机构的自由度,并作出它们仅含低副的替代机构。 图 a) 图 b) 题 5 图 6、试计算图示机构的自由度。(若有复合铰链、局部自由度或虚约束,必须明确指出。)并指出杆组的数目与级别以及机构级别。 G L 题 6 图 7、计算下列机构的自由度(有复合铰链、虚约束和局部自由度请指出) 图 a) 图 b) 题 7 图 8、图示的铰链四杆机构中,已知mm l AB 65=,mm l CD 90=,mm l AD 125=, s rad mm l BC /10,1251==ω,顺时针转动,试用瞬心法求: 1)当φ=15°时,点C 的速度V C ; 2)当φ=15°时,构件BC 上(即BC 线上或其延长线上)速度最小的一点E 的位置及其速度值。 题 8 图 9、在图示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s 转动。凸轮为一偏心圆,其半径R 1=25mm ,L AB =15mm ,L AD =50mm ,φ1=90°,试用瞬心法求机构2的角速度ω2。 题 9 图 10 、 在 图 示 机 构 中 , 已 知 长 度 L AB =L BC =20 mm ,L CD =40mm ,∠a=∠β=90°W 1=100(1/S),请用速度瞬心法求C 点的速度的大小和方向 1.如图所示的坐标系,x 轴沿水平方向,y 轴沿竖直方向。在x 轴上方空间的第一、第二象限内,既无电场也无磁场,在第三象限内存在沿y 轴正方向的匀强电场和垂直xy 平面向里的匀强磁场,在第四象限内存在沿y 轴负方向、场强大小与第三象限电场场强相等的匀强电场。一质量为m 、电量为q 的带电质点,从y 轴上y =h 处的P 1点以一定的水平初速度沿x 轴负向进入第二象限,然后经过x 轴上x =-2h 处的P 2点进入第三象限,带电质点恰能做匀速圆周运动,之后经过y 轴上y =-2h 处的的P 3点进入第四象限。试求: (1)第三象限空间中电场强度和磁感应强度的大小; (2)带电质点在第四象限空间运动过程中的最小速度 【答案】(1) h g q m 2(2) gh 2 2.如图所示,在直角坐标系xoy 的第一、四象限区域内存在两个有界的匀强磁场:垂直纸面向外的匀强磁场Ⅰ、垂直纸面向里的匀强磁场Ⅱ,O 、M 、P 、Q 为磁场边界和x 轴的交点,OM=MP =L .在第三象限存在沿y 轴正向的匀强 电场. 一质量为m 带电量为q +的带电粒子从电场中坐标为(-2L ,-L )的点以速度v 0沿+x 方向出,恰好经过原点O 处射入区域Ⅰ又从M 点射出区域Ⅰ(粒子的重力忽略不计). (1)求第三象限匀强电场场强E 的大小; (2)求区域Ⅰ内匀强磁场磁感应强度B 的大小; (3)如带电粒子能再次回到原点O ,问区域Ⅱ内磁场的宽度至少为多少?粒子两次经过原点O 的时间间隔为多少? 【答案】(1)qL mv E 220=(2)qL mv qR mv B 012==(3)0321)22()(2v L t t t t π+=++=总 3.如图下图所示,坐标空间中有场强为E 的匀强电场和磁感应强度为B 的匀强磁场,y 轴为两种场的分界 面,图中虚线为磁场区的右边界。现有一质量为m.电量为-q 的带电粒子,从电场中的P 点以初速度V 0 1.一队外啮合齿轮标准直齿圆柱挂齿轮传动,测得其中心距为160mm.两齿轮的齿数分 别为Z 1=20,Z 2 =44,求两齿轮的主要几何尺寸。 2.设计一铰链四杆机构,已知其摇杆CD的长度为50mm,行程速比系数K=1.3。 3.有一对标准直齿圆柱齿轮,m=2mm,α=200,Z=25,Z 2=50,求(1)如果n 1 =960r/min, n 2 =?(2)中心距a=?(3)齿距p=? 4.一对标准直齿圆柱齿轮传动,已知两齿轮齿数分别为40和80,并且测得小齿轮的齿顶圆直径为420mm,求两齿轮的主要几何尺寸。 5.某传动装置中有一对渐开线。标准直齿圆柱齿轮(正常齿),大齿轮已损坏,小齿 轮的齿数zz 1=24,齿顶圆直径d a1 =78mm, 中心距a=135mm, 试计算大齿轮的主要几何尺 寸及这对齿轮的传动比。 6.图示轮系中,已知1轮转向n1如图示。各轮齿数为:Z1=20,Z2=40,Z3= 15,Z4=60,Z5=Z6= 18,Z7=1(左旋蜗杆),Z8 =40,Z9 =20 。若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v10 及其移动方向(可在图中用箭头标出)。 7.已知轮1转速n1 =140 r/min,Z1=40, Z 2 =20。求: (1)轮3齿数 Z3; (2)当n3 = -40 r/min时,系杆H的转速 n H 的大小及方向; (3)当n H= 0 时齿轮3的转速n3。 8.一轴由一对7211AC的轴承支承,F r1=3300N, F r2 =1000N, F x =900N, 如图。试求两轴 承的当量动载荷P。(S=0.68Fr e=0.68 X=0.41,Y=0.87) 9.已知一对正确安装的标准渐开线正常齿轮的ɑ=200,m=4mm,传动比i 12 =3,中心距 a=144mm。试求两齿轮的齿数、分度圆半径、齿顶圆半径、齿根圆半径。 10.设计一铰链四杆机构。已知摇杆CD的长度为75mm,行程速比系数K=1.5,机架长度为100mm,摇杆的一个极限位置与机架的夹角为450。 11.设计一对心直动滚子从动件盘形凸轮。已知凸轮基圆半径r b =40mm,滚子半径r=10mm,凸轮顺时针回转,从动件以等速运动规律上升,升程为32mm,对应凸轮推程角为120°;凸轮继续转过60°,从动件不动,凸轮转过剩余角度时,从动件等速返回。 12.已知轮系中各齿轮的齿数分别为Z 1=20、Z 2 =18、 Z 3 =56。求传动比i 1H 。 13.图示轮系,已知Z 1=30,Z 2 =20,Z 2 `=30,`Z 3 =74,且已知n 1 =100转/分。试求n H 。 第六章 轮系及其设计 计算及分析题 1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。 2、图示轮系,已知各轮齿数Z 1=18, Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。 1 2 3 4 5 H | 3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同 — 4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否 和齿轮1相同 1 I 2 2’ 33’ 4 H 5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。 7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。 (2)若n 1=1000r/min ,转臂H 的转速n H = | 1 2 2’ 3 4 5 [ 3’ 4 5 1 2 { H 1 2 3 2’ 3’ 4 H 8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。试 求轮3的转速n 3 的大小和转向。 @ 9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。 10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。 11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=。 1 2 3 H 4 5 n 1 1 2 3 H 2’ 3’ \ 45轮系传动比计算(机械基础)教案设计
机械轮系计算题.docx
高中物理带电粒子在复合场中的运动基础练习题及解析
机械设计基础试题及答案 (2)
第五章 轮系题5-1 图示轮系中,已知1轮
高三电磁复合场计算题(共23道题,有答案)
机械设计基础公式计算例题
机械设计——分析计算题(共88题)
带电粒子在复合场中的运动计算题(3)教学内容
机械设计基础计算题及答案
机械原理题目---轮系