现代控制理论实验报告河南工业大学
河南工业大学
现代控制理论实验报告姓名:朱建勇
班级:自动1306
学号:201323020601
现代控制理论 实验报告
专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定:
一、实验题目:
线性系统状态空间表达式的建立以及线性变换
二、实验目的
1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之
间的相互转换。
3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准
型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。
三、实验仪器
个人笔记本电脑
Matlab R2014a 软件
四、实验内容
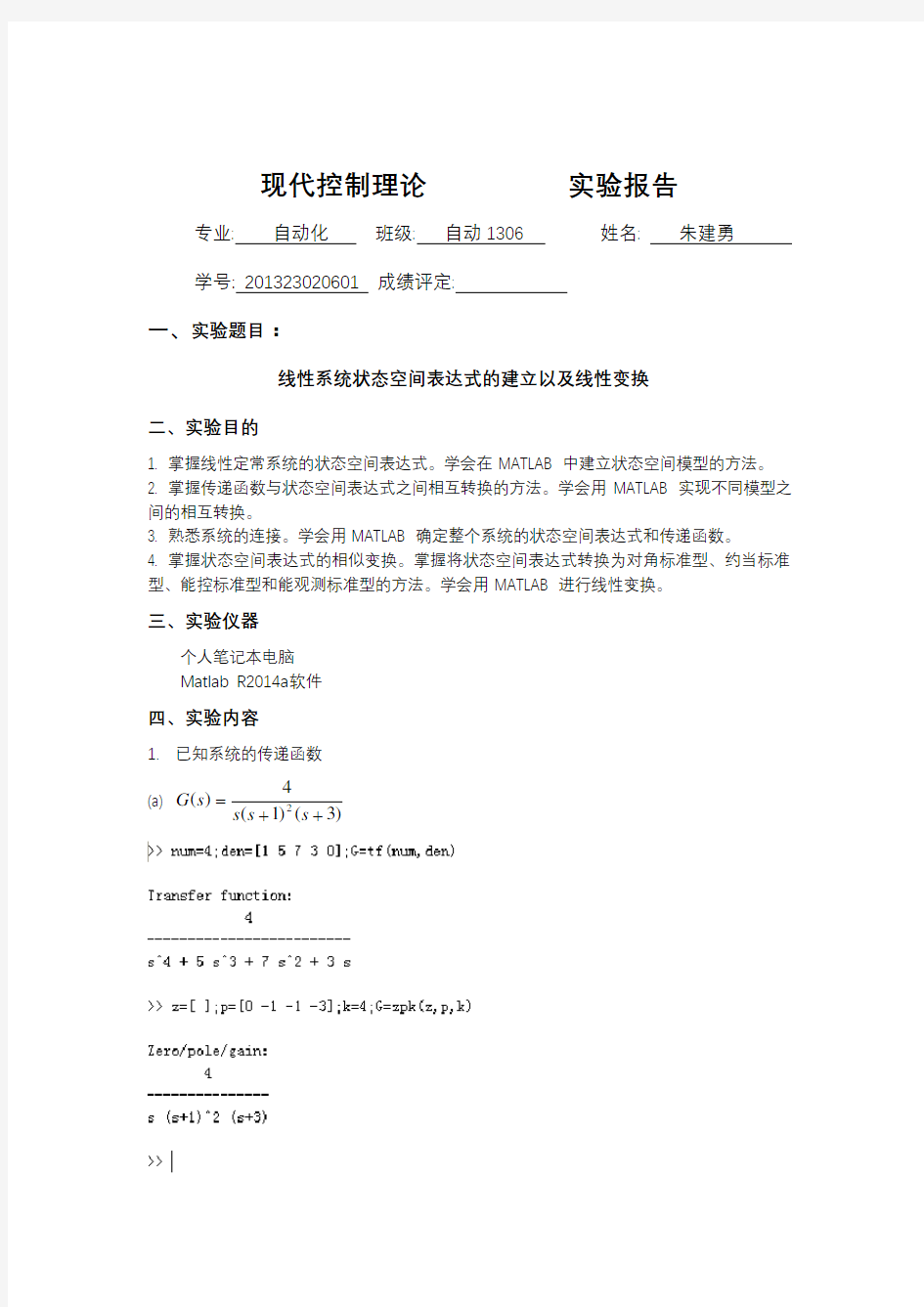
1. 已知系统的传递函数
(a) )
3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6
1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。
(2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函
数tf( )转换为传递函数,并与原传递函数进行比较。
(3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角
标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
(4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标
准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
2. 已知系统的状态空间表达式
(a) u x x ??
????+??????--=106510& []x y 11= (b) u x x ????
??????+??????????---=7126712203010& []111=y (c) u x x ????
??????+??????????--=357213*********& []x y 101= (d) u x x ????
?
?????+??????????---=011310301100& []x y 210-= (1)建立给定系统的状态空间模型。用函数eig( ) 求出系统特征值。用函数tf( ) 和zpk( )
将这些状态空间表达式转换为传递函数,记录得到的传递函数和它的零极点。比较系统的特
征值和极点是否一致,为什么?
(2)用函数canon( )将给定状态空间表达式转换为对角标准型。用函数eig( )求出系统特征
值。比较这些特征值和(1)中的特征值是否一致,为什么? 再用函数tf( )和zpk( )将对角标
准型或约当标准型转换为传递函数。比较这些传递函数和(1)中的传递函数是否一致,为
什么?
(3)用函数ctrlss( )将给定的状态空间表达式转换为能控标准型和能观测标准型。用函数
eig( )求系统的特征值。比较这些特征值和(1)中的特征值是否一致,为什么?再用函数tf( )
将它们转换为传递函数。比较这些传递函数和(1)中的传递函数是否一致,为什么?
五、实验步骤
(a )u x x ??
????+??????--=106510& []x y 11= 1.1建立给定系统的状态空间模型。用函数eig( ) 求出系统特征值。
1.2用函数tf( ) 和zpk( )将这些状态空间表达式转换为传递函数,记录得到的传递函数和它
的零极点。
1.3比较系统的特征值和极点是否一致,为什么?
可以看出系统特征值和极点一致。经典控制理论传递函数的极点和现代控制理论系统矩阵的特征值都是系统固有特征值,其实质上是一样的,只是系统的表述方式不一样。
2.1用函数canon( )将给定状态空间表达式转换为对角标准型。用函数eig( )求出系统特征值。比较这些特征值和(1)中的特征值是否一致,为什么?
这些特征值和(1)中的一样,因为其实质上是一样的,只是系统的表述方式不一样。
2.2再用函数tf( )和zpk( )将对角标准型或约当标准型转换为传递函数。比较这些传递函数和(1)中的传递函数是否一致,为什么?
比较可以看出这两个传函出现零极点对消。
3.1用函数ctrlss( )将给定的状态空间表达式转换为能控标准型和能观测标准型。用函数eig( )求系统的特征值。比较这些特征值和(1)中的特征值是否一致,为什么?
能控标准型:
能观测标准型:
特征值:
可以看出这些特征值和(1)中一样,因为其实质上是一样的,只是系统的表述方式不一样。
3.2再用函数tf( )将它们转换为传递函数。比较这些传递函数和(1)中的传递函数是否一致,为什么?
这些传函和(1)中一样,因为其实质上是一样的,只是系统的表述方式不一样。
(b )u x x ????
??????+??????????---=7126712203010& []111=y 1.1建立给定系统的状态空间模型。用函数eig( ) 求出系统特征值。
1.2用函数tf( ) 和zpk( )将这些状态空间表达式转换为传递函数,记录得到的传递函数和它
的零极点。比较系统的特征值和极点是否一致,为什么?
可以看出系统特征值和极点一致。经典控制理论传递函数的极点和现代控制理论系统矩阵的特征值都是系统固有特征值,其实质上是一样的,只是系统的表述方式不一样。
2.1用函数canon( )将给定状态空间表达式转换为对角标准型。用函数eig( )求出系统特征值。比较这些特征值和(1)中的特征值是否一致,为什么?
2.2再用函数tf( )和zpk( )将对角标准型或约当标准型转换为传递函数。
3.1用函数ctrlss( )将给定的状态空间表达式转换为能控标准型和能观测标准型。用函数eig( )求系统的特征值。
3.2再用函数tf( )将它们转换为传递函数。比较这些传递函数和(1)中的传递函数是否一致,为什么?
这些传函和(1)中一样,因为其实质上是一样的,只是系统的表述方式不一样。
(c) u x x ????
??????+??????????--=357213*********& []x y 101= 1.1建立给定系统的状态空间模型。用函数eig( ) 求出系统特征值。
河南工业大学封面个人简历模板
……………………….…………………………………………………………………………………姓名:杜宗飞专业:计算机科学与技术 学院:数理信息学院学历:本科……………………….…………………………………………………………………………………手机:×××E – mail:×××地址:河南工业大学
自荐信 尊敬的领导: 您好!今天我怀着对人生事业的追求,怀着激动的心情向您毛遂自荐,希望您在百忙之中给予我片刻的关注。 我是河南工业大学计算机科学与技术专业的2014届毕业生。河南工业大学大学四年的熏陶,让我形成了严谨求学的态度、稳重踏实的作风;同时激烈的竞争让我敢于不断挑战自己,形成了积极向上的人生态度和生活理想。 在河南工业大学四年里,我积极参加各种学科竞赛,并获得过多次奖项。在各占学科竞赛中我养成了求真务实、努力拼搏的精神,并在实践中,加强自己的创新能力和实际操作动手能力。 在河南工业大学就读期间,刻苦进取,兢兢业业,每个学期成绩能名列前茅。特别是在专业必修课都力求达到90分以上。在平时,自学一些关于本专业相关知识,并在实践中锻炼自己。在工作上,我担任河南工业大学计算机01班班级班长、学习委员、协会部长等职务,从中锻炼自己的社会工作能力。 我的座右铭是“我相信执着不一定能感动上苍,但坚持一定能创出奇迹”!求学的艰辛磨砺出我坚韧的品质,不断的努力造就我扎实的知识,传统的熏陶塑造我朴实的作风,青春的朝气赋予我满怀的激情。手捧菲薄求职之书,心怀自信诚挚之念,期待贵单位给我一个机会,我会倍加珍惜。 下页是我的个人履历表,期待面谈。希望贵单位能够接纳我,让我有机会成为你们大家庭当中的一员,我将尽我最大的努力为贵单位发挥应有的水平与才能。 此致 敬礼! 自荐人:××× 2014年11月12日 唯图设计因为专业,所 以精美。为您的求职锦上添花,Word 版欢迎 下载。
现代控制理论实验报告
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
河南工业大学-图形学实验四
实验四:二维变换与裁剪算法的实现 一、实验目的 1、掌握平移变换、旋转变换和缩放变换方法; 2、达到掌握二维图形基本几何变换及运用几何变换快速方便生成图形的目的; 3、掌握图形裁剪算法。 二、实验要求 1. 在MFC单文档应用程序中,添加奇次二维坐标点类CP2,如图1.1 所示,参考图1.2部分代码,分别完成二维图形的平移、旋转和缩放。(注:变换参数可在程序内直接给出或用对话框等形式输入,简单二维图形经二维变换后可生成复杂图形。) 图1.1 CP2类定义
图1.2 部分二维变换参考代码 2. 利用Cohen-Sutherland端点编码算法编程实现任意线段的裁剪,要求自定义窗口区域和直线端点。(注:未被裁剪的线段及被裁剪的线段用不同的颜色显示出来。) 三、实验内容 一,二维图形的变换 ○1菜单栏的建立 ○2对话框的创建, 创建对应的类为dialog
○3为编辑框Edit添加成员变量:右键,建立类向导,选择Member Variables,双击 IDC_EDIT1(对应编辑框的ID), Member variable name m_x1 Category Value Variable type OK ○4新建两个类CCP2和TransForm,CCP2类用于将二维点坐标转换成齐次坐标,TransForm类是平移,旋转,缩放的具体实现。代码如下: // CP2.h #pragma once class CP2 { public: CP2(); virtual ~CP2(); CP2(double x, double y); //如果滚动条不能拉动,请启用宏。
现代控制理论课程报告
- 现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的 ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有: 1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 [ 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这
河南工业大学实验报告——查找和排序(排序)——张伟龙
河南工业大学实验报告 课程名称数据结构实验项目实验三查找和排序(二)——排序院系信息学院计科系专业班级计科1203 姓名张伟龙学号 201216010313 指导老师范艳峰日期 2013.6.5 批改日期成绩 一实验目的 掌握希尔排序、快速排序、堆排序的算法实现。 二实验内容及要求 实验内容:1.实现希尔排序。 2.实现快速排序。 3. 实现堆排序。 (三选一) 实验要求:1. 根据所选题目,用C语言编写程序源代码。 2. 源程序必须编译调试成功,独立完成。 三实验过程及运行结果 选择第三题: Source Code: #include
int rchild=2*i+1; //i的右孩子节点序号 int max=i; //临时变量 if(i<=size/2) //如果i是叶节点就不用进行调整 { if(lchild<=size&&a[lchild]>a[max]) { max=lchild; } if(rchild<=size&&a[rchild]>a[max]) { max=rchild; } if(max!=i) { swap(a[i],a[max]); HeapAdjust(a,max,size); //避免调整之后以max为父节点的子树不是堆 } } } void BuildHeap(int *a,int size) //建立堆 { int i; for(i=size/2;i>=1;i--) //非叶节点最大序号值为size/2 { HeapAdjust(a,i,size); } }
现代控制理论实验
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
河南工业大学经济贸易学院
经济贸易学院 一、学院简介 河南工业大学经济贸易学院成立于2005年1月19日,由原郑州工程学院(前身为郑州粮食学院)经济贸易系和原郑州工业高等专科学校部分教师合并组建而成。虽然创建时间还不长,但发展很快。金融学专业、国际经济与贸易专业为省级特色专业和校重点优势专业。经济学为省级教学团队。西方经济学为省级精品课程。产业经济学是省级重点学科。在学院挂牌的河南工业大学粮食经济研究中心为河南省普通高等学校人文社会科学重点研究基地。 经济贸易学院现设有金融学、国际经济与贸易学、财政学、经济学等4个系的4个本科专业(金融学专业、国际经济与贸易专业、经济学专业、财政学专业)以及相应的商业银行、证券与期货、国际商务、国际物流、税收筹划、经济统计与分析等专业方向。近些年来,各个专业及专业方向招生形势喜人。 自2012年起,学院金融学专业在河南和部分外省按本科一批招生,其他专业本科二批招生。2012年,学院本科新生招生班数、人数分别达到了13个、435人,比2011年分别增加了3个、83人,均创历年之最。金融学专业不仅在河南、广东、安徽、江西、海南等多个省份实现了一本招生,招到了3个一本班,而且生源相当充裕。 经济贸易学院拥有应用经济学等1个一级学科硕士学位授权点,产业经济学、金融学、国际贸易学、财政学、农业经济管理等11个二级学科硕士学位授权点,农村与区域发展等1个专业硕士学位授权点,以及同等学力人员硕士学位授予权。2012年硕士研究生招生人数达到26人,比2011年的21人增加5人,创历年之最。 目前,经济贸易学院在校本科生和硕士研究生人数,合计达到了1400多人,创历年之最。 经济贸易学院还拥有2个双学位专业(金融学专业、国际经济与贸易专业),2012年双学位招生人数达210人,比2011年的184人增加26人,创历年之最。 在人才培养方面,经济贸易学院明确了“追求卓越”的办学思想,“协调发展、优势明显”的办学目标,以及“厚理论基础、宽综合知识、高人文素质、强
河南工业大学 2011 至 2012 学年第 二 学期 机械设计基础试卷A参考答案
河南工业大学 2011 至 2012 学年第 二 学期 机械设计基础试卷A 班级:非机类专业本科生 本试卷考试分数占学生总评成绩的90% 复查总分 总复查人 一.选择题:(本题共20分, 每小题1分) 1. 在本课程研究范畴中,______是运动的单元(a.零件; b.构件; c. 机构;) 2. 曲柄摇杆机构中,以______为主动件时,才出现机构的死点位置。 (a. 摇杆 b. 曲柄)
3. 行程速度变化系数K 越大,急回运动越______。(a.显著 b.不显著 c.不一定) 4.平面连杆机构传动中传动角与运动关系是______。 (a. 传动角小,运动效果好 b. 传动角与运动无关 c. 传动角大,运动效果好) 5. 凸轮机构中从动件采用等速运动规律时,具有______。 (a. 刚性冲击 b. 柔性冲击 c. 平稳无冲击) 6. 根切现象发生在______的场合。 (a.模数较小 b.齿数较多 c.齿数较少) 7. 一对直齿圆柱齿轮机构的正确啮合条件为______。 (a .m 1=m 2,z 1=z 2 b. m 1=m 2,α1=α2 c. z 1=z 2,α1=α2) 8.用标准齿条刀具加工标准渐开线直齿圆柱外齿轮时,刀具的中线与齿轮的分度圆______。 (a .相切 b.相割 c.相离) 9. 三角形普通螺纹的公称直径是指它的______。 (a. 大径 b.中径 c.小径) 10.螺纹的牙型角为α,牙型半角为β,升角为ψ,螺纹副的当量摩擦角为V ρ,则螺纹副的自锁条件是______。 (a .ψ≤β b . β≤r ρ c .α≤V ρ d . ψ≤V ρ) 11.普通平键宽度的确定是按______。 (a ..轮毂长度;b .轴直径;c .轮毂内径) 《机械设计基础》试卷 第 1 页 ( 共 6 页 ) 12. 凸轮机构中的压力角是指 间的夹角。 (A )凸轮上接触点的法线与从动件的运动方向 (B ) 凸轮上接触点的法线与该点线速度
现代控制理论实验报告
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
数据库技术基础4
河南工业大学实验报告数据库技术基础4 课程数据库技术基础实验名称实验4.2视图的使用 院系中英国际学院 实验4.2 视图的使用 1.创建视图 (1)创建YGGL数据库上的视图DS_VIEW,视图包含Departments表的全部列。 图4.2.1创建YGGL数据库上的视图DS_VIEW (2)创建YGGL数据库上的视图Employees_view,视图包含员工编号、姓名和实际收入三列。 图4.2.2创建YGGL数据库上的视图Employees_view 思考与练习: 在创建视图时SELECT语句有哪些限制? 不能使用COMPUTE或者COMPUTE BY子句,除非和TOP子句一起使用,否则,不能使用ORDER BY子句,不能使用INTO关键字,不能使用OPTION子句,不能引用临时表和表变量。 在创建视图时有哪些注意点? 1.在CREATE VIEW语句中,不能包括ORDER BY,COMPUTE或者COMPUTE BY 子句也不能 出现INTO关键字。 2.创建视图所参考基表的列数最多为1024列。 3.创建视图不能参考临时表。 4.尽量避免使用外连接创建视图。 5.在一个批处理语句中,CREATE VIEW 语句不能和其他TRANSACT-SQL语句混合使用。
创建视图,包含员工编号、姓名、所在部门名称和实际收入这几列。 图4.2.3创建视图 2.查询视图 (1)从视图DS_VIEW中查询出部门编号为“3”的部门名称。 图4.2.1 (2)从视图Employees_view中查询出姓名为“王林”的员工的实际收入。 图4.2.4查询出姓名为“王林”的员工的实际收入 思考与练习 若视图关联了某表中的所有字段,而此时该表中添加了新的字段,视图中能否查到该字段?不能,必须重新创建视图才可以查询到 自己创建一个视图,并查询视图中的字段。
现代控制理论综合设计报告—你懂得
《现代控制理论综合设计报告》 问题重述: 图示为单倒立摆系统的原理图,其中摆的长度l=1m,质量m=0.1kg,通过铰链安装小车上,小车质量M=1kg,重力加速度g=9.8m/s2。控制的目的是当小车在水平方向上运动时,将倒立摆保持在垂直位置上。 分别列写小车水平方向的力平衡方程和摆的转矩平衡方程,通过近似线性化处理建立系统的状态空间表达式; 绘制带状态观测器状态反馈系统的模拟仿真图,要求系统期望的特征值为:-1,-2,-1+j,-1-j;状态观测器的特征值为:-2,-3,-2+j,-2-j; 根据模拟仿真图,分别绘制系统综合前后的零输入响应曲线 本文的仿真实验亮点如下: ●对单倒立摆进行传统的传递函数、状态空间建模,全面分析了单倒立摆的物理性质。 ●在物理模型建立时,强调了角速度θ不能近似为0。 ●建立状态空间表达时,选择位移x和角度θ作为输出,是一个多输出系统。但增加了状 态观测器设计的复杂度。 ●在摆运动过程中,初始扰动角θ可达60度左右;而且调节过程中,倒立摆θ在(-90,90) 范围内变化,符合实际情况。 ●在仿真波形图中,展示了状态观测器的跟踪过程,体现了其在反馈控制中起到的作用。 ●在初始扰动60度下,分别在原始系统、状态反馈系统、带状态观测器反馈系统,进行 了零输入响应、阶跃输入响应的仿真实验。 ●解释了带状态观测器反馈时,阶跃输入,但系统前1秒处于稳态的现象的原因。
1单级倒立摆数学模型的建立 倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定系统,作为控制系统的被控对象,许多抽象的控制概念都可以通过倒立摆直观地表现出来。本设计是以一阶倒立摆为被控对象来进行设计的。 传递函数法:对SISO 系统进行分析设计,在这个系统中θ作为输出,因为它比较直观,作用力u 作为输入。 状态空间法:状态空间法可以进行单输入多输出系统设计,因此在这个实验中,我们将尝试同时对摆杆角度和小车位置进行控制,并给小车加一个阶跃输入信号。 本文利用Matlab ,对系统的传递函数和状态空间进行分析,并用指令计算状态空间的各种矩阵,仿真系统的开环阶跃响应。Matlab 将会给出系统状态空间方程的A,B,C 和D 矩阵,并绘出在给定输入为阶跃信号时系统的响应曲线。 在忽略了空气阻力、各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统。 假设系统内部各相关参数为: φ和θ都表示摆杆与垂直向上方向的夹角 l L 、都表示 摆杆长度 1m M 小车质量 1kg m 摆杆质量 0.1kg x 小车位置 单倒立摆系统力的平衡方程分析 小车、摆杆力的分析图如下所示: 小车的平衡方程:u H Mx -= 摆杆的X 轴方向力的平衡方程:2 2(sin )d H m x l dt θ=+ 摆杆Y 轴方向,力的平衡方程:2 2(lcos )d V mg m dt θ-= 摆杆的转矩平衡方程:sin cos VL HL I θθθ-= 选择摆杆的质心在端点处,则惯性惯量2 12ml I = 方程的线性化处理 当θ很小时,可对方程进行线性化。由于控制的目的当小车在水平方向上运动时,将倒立摆保持在垂直位置上。在施加合适的外力下,θ比较小,接近于0,sin ,cos 1θθθ→→,对以 上方程进行线性化。但要注意的是,θ不能约等于0,因为摆杆的角速度在实际情况中是比较快的。但对以上方程先求导会产生θ及其平方项,但这些项都和sin θ相乘,于是这些项还是约等于0。另外,如果先线性化,再求导,则不会产生以上需要考虑的问题。线性化后方程如下:
环境工程原理期末复习资料河南工业大学
1、管路分为简单管路(①、通过各管路的质量流量不变;②、整个管路阻力损失等于各 管路阻力损失之和。)和复杂管路,复杂管路包括分支管路(①、总管流量等于各支管流量 之和;②、主管段各段流量不同,阻力损失需分段加以计算;③、机械能守恒。)和并联管路(①、总流量等于各支管流量之和;②、各支管中阻力损失相等;③、各支管的流量依据阻力损失相同的原则进行分配。)。 2、流量计包括测速管(毕托管)(测得的是点速度)、孔板流量计(固定安装,阻力损失较大)、文丘里流量计(比孔板流量计减少了机械能损失),转子流量计(必须垂直安装,流体 自上而下流动)。 3、热量传递包括热传导、对流传热、辐射传热。 4、导热系数:①、气体导热系数很小,利于绝热保温,随温度和压强的升高而升高。②、水的导热系数最大,常用做导热介质。液体(除水和甘油外)导热系数随温度的升到而减小, 压力影响不大。③、固体:金属的λ选大于非金属的λ;金属有杂质,λ减小;纯金属λ随温度升高而减小,合金λ随温度升高增大;晶体λ随温度升高而减小,非晶体λ随温度升高而增大。 5、环境工程中常见的传质过程有:吸收、萃取、吸附、离子交换、膜分离。 6、重力沉降和离心沉降的比较: 区别:①、重力沉降的动力是重力,沉降方向向下,沉降速度恒定,沉降的加速度为重 力加速度;②、离心沉降的动力是离心力,沉降方向向外,沉降的速度与半径有关,是变 化的,沉降的加速度为离心加速度。 联系:离心分离因数,是离心分离设备的重要指标,表示离心沉降速度较沉降速度 可以提高的倍数。 7、过滤可以分为:表面过滤(滤饼过滤)和深层过滤。 8、表面过滤与深层过滤的比较: 区别:①、表面过滤的条件是颗粒物浓度高,滤速慢,虑饼易形成,过滤的介质是织布 或多孔固体,过滤介质的孔一般比颗粒物的粒径小,有效过滤介质主要是虑饼,实际应用于真空过滤机、板框式压滤机、慢滤池、袋滤器。②、深层过滤的条件是颗粒物浓度底,滤 速快,过滤介质是固体颗粒,过滤介质的空隙大于颗粒物粒径,有效的过滤介质是固体颗粒, 实际应用于快滤池。 联系:表面过滤中虑饼的比阻和深层过滤中过滤介质的比阻均可用公式求得。 9、恒压过滤和恒速过滤的比较: 区别:①、恒压过滤的速度逐渐减小,过滤压差保持不变,基本方程为:②、恒速过滤的速度保持不变,压差逐渐增大,基本方程为: 联系:环境工程常采用先恒速过滤,到一定阶段后换成恒压过滤的过滤方式。 10、相平衡关系主要应用于:判断传质方向、计算传质推动力、确定传质过程的极限。 11、物理吸收和化学吸收的比较:①、物理吸收不发生化学反应,只存在相平衡;化学吸 收在液相中发生化学反应,相平衡和化学平衡共存。②、化学吸收只能减小液膜的传质阻 力,因此,物理吸收和化学吸收在气膜中的传质情况相同。③、液膜控制的吸收过程宜采 用化学吸收,气膜控制的吸收过程采用化学吸收作用不明显。 12、物理吸附和化学吸附的比较:①、物理吸附的作用力是德华力,作用力较弱,吸附热 较小,是可逆吸附。②、化学吸附的作用力是化学键,作用力较强,吸附热较大,是不可 逆吸附。 13、吸附的类型:①、按作用力性质分:物理吸附和化学吸附。②、按吸附剂再生方法分:变温吸附和变压吸附。③、按原料组成分:大量吸附分离和杂质去除。④、按分离机理分:
实验八 使用JDBC访问数据库
河南工业大学实验报告 课程数据库系统原理及应用 _ 实验名称实验八使用JDBC访问数据库 院系_____ 专业班级__ _ 姓名____________ 学号_____ _ 指导老师:日期 一.实验目的 熟悉在Java语言中采用JDBC调用SQL SERVER存储过程的方法。 二.实验内容及要求 基于实验二中的关系模式,编写存储过程,并采用JDBC来调用存储过程完成指定查询需求。 1)存储过程:查询所有院系的平均高考成绩,并按平均成绩排序。调用存储过程返回数据并在界面上显示数据。 2)存储过程:查询指定院系(参数)的教师信息,并按教师编号升序排序。调用存储过程完成:查询“信息科学与工程学院”的教师信息。 3)存储过程:修改指定学生(参数)、指定课程(参数)的成绩(参数)。调用存储过程完成:修改学生'2007001'的选修课程'105322'的成绩为89。 要求:提交源程序并标识必要的注释。保证程序能正确编译和运行,认真填写实验报告。 三.实验过程及结果(含源代码) 1、存储过程:查询所有院系的平均高考成绩,并按平均成绩排序。调用存储过程返回数据并在界面上显示数据。 源代码: 存储过程: create procedure PAIXU as select dept,A VG(oldgrade)as avgoldgrade from student group by dept order by avg(oldgrade) return 通过ODBC调用存储过程来完成操作: import java.sql.*; public class PRO { public static void main(String[] args) throws Exception { // TODO Auto-generated method stub String url =
现代控制理论实验报告河南工业大学
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
河南工业大学期中建筑考试
河南工业大学期中建筑考试 1. ( 单选题 ) 钢筋砖过梁适用于洞口宽度不超过( )的墙体。(本题 2.5分) A、 1.5m B、 1.8m C、 2.0m D、 2.5m 标准答案:C 解析: 得分:0 2. ( 单选题 ) 楼梯平台按位置不同分中间平台和楼层平台。(本题2.5分) A、正确 B、错误 标准答案:A 解析: 得分:2.5 3. ( 单选题 ) 有组织女儿墙外排水雨水斗的最大集水面积不宜超过( ) 平方米。(本题2.5分) A、 100 B、 150 C、 200 D、 250 标准答案:C 解析: 得分:2.5 4. ( 单选题 ) 单坡排水屋面宽度不宜超过()(本题2.5分) A、 18m B、 15m
C、 12m D、 10m 标准答案:C 解析: 得分:0 5. ( 单选题 ) 判断建筑构件是否达到耐火极限的具体条件有 ()。①构件是否失去支持能力②构件是否被破坏③构件是否失去完整性④构件是否失去隔火作用⑤构件是否燃烧(本题2.5分) A、①③④ B、②③⑤ C、③④⑤ D、②③④ 标准答案:A 解析: 得分:2.5 6. ( 单选题 ) 墙体的强度主要与该墙体所采用的材料有关。()(本题2.5分) A、 true B、 false 标准答案:B 解析: 得分:0 7. ( 单选题 ) 民用建筑包括居住建筑和公共建筑,下面属于居住建筑的是( )。(本题2.5分) A、幼儿园 B、疗养院 C、宿舍 D、旅馆 标准答案:C
解析: 得分:2.5 8. ( 单选题 ) 长厚比属于墙体设计要求中的( )。(本题2.5分) A、美观方面 B、经济方面 C、安全方面 D、功能方面 标准答案:C 解析: 得分:2.5 9. ( 单选题 ) 某高校建一9层学生公寓,建筑高度为29.95m。根据我国现行《建筑防火规范》,该建筑属于什么建筑?( )(本题2.5分) A、多层建筑 B、高层建筑 C、一类高层建筑 D、中高层建筑 标准答案:B 解析: 得分:0 10. ( 单选题 ) 钢筋混凝土过梁在洞口两侧伸入墙内的长度,应不小于()。(本题2.5分) A、 120mm B、 180mm C、 200 mm D、 240mm 标准答案:D 解析: 得分:2.5
现代控制理论实验报告
现代控制理论实验报告 组员: 院系:信息工程学院 专业: 指导老师: 年月日
实验1 系统的传递函数阵和状态空间表达式的转换 [实验要求] 应用MATLAB 对系统仿照[例]编程,求系统的A 、B 、C 、阵;然后再仿照[例]进行验证。并写出实验报告。 [实验目的] 1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法; 2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。 [实验内容] 1 设系统的模型如式示。 p m n R y R u R x D Cx y Bu Ax x ∈∈∈?? ?+=+=& 其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。系统的传递函数阵和状态空间表达式之间的关系如式示。 D B A SI C s den s num s G +-== -1)() () (()( 式中,)(s num 表示传递函数阵的分子阵,其维数是p ×m ;)(s den 表示传递函数阵的按s 降幂排列的分母。 2 实验步骤 ① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关系如式,采用MATLA 的编程。注意:ss2tf 和tf2ss 是互为逆转换的指令; ② 在MATLA 界面下调试程序,并检查是否运行正确。 ③ [] 已知SISO 系统的状态空间表达式为,求系统的传递函数。
, 2010050010000100001 0432143 21u x x x x x x x x ? ? ??? ? ??????-+????????????????????????-=????????????&&&&[]??? ? ? ???????=43210001x x x x y 程序: A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 5 0]; B=[0;1;0;-2]; C=[1 0 0 0]; D=0; [num,den]=ss2tf(A,B,C,D,1) 程序运行结果: num = 0 den = 0 0 0 从程序运行结果得到:系统的传递函数为: 2 4253 )(s s s S G --= ④ [] 从系统的传递函数式求状态空间表达式。 程序: num =[0 0 1 0 -3]; den =[1 0 -5 0 0]; [A,B,C,D]=tf2ss(num,den) 程序运行结果: A = 0 5 0 0 1 0 0 0 0 1 0 0
河南工业大学软件工程期末考试
2010-2011 河南工业大学期末软件工程考试 适合年级:计科09级 一、单项选择题(本大题共20小题,每小题1分,共20分) 在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.软件开发环境按解决的问题分类包含() A.程序设计环境B.工具箱环境 C.基于方法的环境D.以语言为中心的环境 2.为了提高软件产品的质量和可靠性,对某些无法避开的差错,使其影响减至最小程度所采用的技术是() A.容错技术B.避开错误技术 C.检测技术D.排错技术 3.软件复杂性的常用度量方法包括() A.BOEHM度量法B.可扩充度量法 C.线性度量法D.代码行度量法 4.面向对象的要素包含() A.对象的唯一性B.抽象 C.继承性D.分类性 5.构造原型时,主要考虑() A.全部功能B.原型要体现的特征 C.全部细节D.全部要求 6.维护中,因修改文件的打开或关闭而引起的错误是() A.文档副作用B.数据副作用 C.编码副作用D.设计副作用 7.诊断和消除程序在使用过程中发生错误的过程称为() A.校正性维护B.适应性维护 C.完善性维护D.预防性维护 8.在白盒技术测试用例的设计中,以下覆盖标准中发现错误能力最强的是() A.语句覆盖B.判定/条件覆盖 C.条件组合覆盖D.判定覆盖 9.软件调试技术包括() 1
A.回溯法调试B.循环覆盖调试 C.边界值分析调试D.集成测试调试 10.在软件测试中,首先对每个模块分别进行单元测试,然后再把所有的模块按设计要求组装在一起测试,称为() A.确认测试B.系统测试 C.渐增式测试D.非渐增式测试 11.源代码的可维护性表现了程序设计语言的() A.心理特性B.工程特性 C.技术特性D.传统特性 12.至今已有好几百种不同的高级语言,它们有的是用于数值计算,有的是用于商业管理,有的是用于编写系统软件。以下语言中较适用于数值计算的语言是() A.BASIC B.SQL C.LISP D.FORTRAN 13.在JSP方法中解决结构冲突的具体办法是() A.引入中间数据结构或中间文件B.删除某个输入数据结构 C.删除某个输出数据结构D.增加某个输入或输出数据结构 14.模块的内聚性可以按照内聚程度的高低进行排序,以下排列中属于从低到高 ....的正确次序是()A.偶然内聚,时间内聚,逻辑内聚 B.通信内聚,时间内聚,逻辑内聚 C.逻辑内聚,通信内聚,顺序内聚 D.功能内聚,通信内聚,时间内聚 15.以下软件生存周期的活动中,要进行软件结构设计的是() A.测试用例设计B.概要设计 C.程序设计D.详细设计 16.能够清楚地表示复杂的条件组合与应做的动作之间的对应关系的工具是() A.结构化语言B.PAD图 C.判定表D.程序流程图 17.需求分析方法必须能够表达和理解问题的数据域和() A.数据流B.用户类型 C.功能域D.应用领域 18.以用户需求为动力,以对象作为驱动的模型是() A.瀑布模型B.基于知识的模型 C.喷泉模型D.增量模型 2
现代控制理论课程报告
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也
河南工业大学图书馆管理系统
课程报告 课程名称:c程序设计实践 专业班级:信息类 学生姓名:周元甲 学号: 任课教师: 学期:2011-2012学年第二学期
课程报告任务书 成绩评定教师:
1 需求分析 对案例分析后,我认为该案例是需要一个管理图书馆内图书信息的程序,做程序的当然要根据需求做了,图书信息录入就是增加图书信息,可以用一个文件来存储,修改、删除图书信息就是对存储的文件进行改动,查询则是对文件进行检索而已,无论是查询、排序还是浏览,都要对文件进行遍历,然后在内存中执行简单的操作,得出想要的结果。 考虑到权限的需求,我认为这个系统需要一个管理员,至少是不能让别人随随便便就能进去,而改动其中的信息,于是我想到,既然是图书馆管理系统,那就需要老师和学生都能进去,而执行不同的操作,由于身份不同,可执行的操作也就不同,学生的权限当然没有老师的大了。 由于这是一个图书馆管理系统,学生进去之后便可以进行借书,查书,还书等操作。这才是符合正常的权限和功能设置,老师也有权决定哪些学生可以进去,哪些不能进,知道哪些同学借了哪些书。 这就是我对这个案例的需求分析。 2 概要设计 由于是概要设计下面先介绍一下系统的总体框架,细节部分不再详述。 该程序主要能够实现图书的录入、查询、修改、删除、排序、浏览;学生信息的注册、修改、删除、浏览;教师的登陆、学生的登录;其中教师拥有对图书的录入、查询、修改、删除、排序、浏览,学生信息的注册、修改、删除、浏览等权限;学生拥有对图书的查询、排序、浏览、借书、查询已借图书、还书等权限;学生的权限由教师赋予、学生登录的账号、密码等由教师设定;学生的借书、还书都会引起库中图书数量的变动;为了防止恶作剧,并给每个人都有借书的机会,由于图书数量有限,每个学生仅限借三本书,超过三本系统将会自动提示,并不能借出。 本程序主要就用了文件的打开、关闭、写入、读出等函数如fopen()、fclose()、fwrite()、fread()。 程序总体框架如下: